
Submitted:
15 January 2026
Posted:
19 January 2026
You are already at the latest version
Abstract
Propulsion systems aboard small satellites assisting dynamic space missions at the proximity of deep space natural objects may face challenges in long-term non-serviceable operations, achieving thrust vector direction control, and adapting to severe environmental conditions. The proposed solution involves using pulsed plasma thrusters with multiple spark plugs for uniform ignition and thrust vector control, enhancing reliability and efficiency of propulsion system. Key advantages of the use of such an approach include minimal power consumption, efficient volume utilization, and enhanced reliability through redundant ignition points. Experimental validation confirms the effectiveness of the proposed architecture, demonstrating uniform ignition patterns and capability of thrust vector adjustment. It can be supposed that this approach supports the viability of small satellites in future deep space missions, promising dynamic, resilient, and reusable proliferated space systems.
Keywords:
propulsion system
; pulsed plasma thruster
; discharge ignition
; thrust vector control
; dynamic space missions
; small satellites
1. Introduction
Nowadays, small satellites have become the main building blocks of space missions because they can reduce the risk of operational failures and mitigate the impact of external factors on the system [1,2,3]. In other words, various tasks – whether it’s providing communication services, conducting remote sensing, producing materials, or performing space observations – are increasingly being carried out using swarms of small satellites [4].
Small-form-factor artificial space vehicles within the proliferated systems need to execute multiple maneuvers throughout their service lives [4]. These maneuvers may involve orbit positioning, satellite attitude and altitude control, supporting onboard technological processes, formation flying, approach and departure operations, among others. An example of such a proliferated space system would be a swarm of small satellites employed for in-orbit material production near a deep-space natural object. This production method may be required to perform in space due to multiple restrictions – the need to utilize resources of space environment, the need in zero gravity conditions, the dangerous technological processes, or the law restrictions for production of the materials on the planet [5]. During this mission, a cluster of small satellites, once launched, performs manufacturing activities in space (see Figure 1). Their operation necessitates the mentioned maneuvering capabilities throughout the active phase of the mission. Satellites involved in this task might operate at distinct time intervals (in Figure 1 denoted as t_1, t_2, t_3). That means these satellites can be launched in different batches. Once the technological process aboard each satellite concludes, all units converge into a single descent vehicle scheduled frequently to deliver the payload safely back to the surface of the dedicated natural space object.
To carry out the maneuvers mentioned for assisting the considered space mission, propulsive forces are needed to be generated in multiple directions. Given the constraints imposed by small-form-factor satellites, a suitable solution involves employing a propulsion system that enables precise control over the direction of thrust using a single integrated device [4].
When considering missions originating from or intended to support human settlements located on distant celestial bodies, several critical challenges arise due to limited resources and restricted technological infrastructure. Furthermore, certain scenarios introduce another crucial challenge – the necessity to operate under exceptionally severe environmental conditions, exemplified by orbital operations around planets like Jupiter [6]. Therefore, components and subsystems within these small satellites must exhibit robustness against prolonged exposure to extreme surroundings while maintaining high reliability over extended periods without significant degradation.
At present, only a few flight-proven propulsion systems exist that integrate the capability of controlling thrust vector direction within a single compact device [4]. Notable examples include the pulsed plasma thruster EO-1 [7], the gimbaled ion thruster BIT-3 [8], the bi-directional electrodeless plasma thruster (BDEPT), and the electrodeless plasma thruster with magnetic thrust vectoring (MTVEPT) [9]. It should be noted that the use of such technologies as the electrospray of laser propulsion systems may pose obstacles and risks for operations in the reusable proliferated space systems [4]. Although contemporary iterations of these technologies demonstrate suitability for deployment on small satellites and resilience in demanding environmental conditions, their operations require special techniques and their production require complicated equipment.
An effective strategy to enhance the maneuverability of small satellites sized below 6U entails developing an electrodeless plasma thruster (EPT) utilizing the solid-state propellants characterized by high storage densities [10]. However, this technology is currently under active development [11]. One existing technology leveraging dense-storage propellants is the ablative-type pulsed plasma thruster (PPT) [12]. Implementing PPTs that incorporate built-in thrust vectoring functionality represents a viable alternative solution for assisting satellites in executing complex maneuvers essential for dynamic space missions [13].
This study undertakes a thorough exploration of a new methodology aimed at enhancing both the reliability and operational lifespan of pulsed plasma thrusters of coaxial geometry, enabling thrust-vectoring capability (TVC). It is suggested to implement the use of multiple spark plugs approach to enhance the performance of PPT and provide capability of controlling thrust vector direction. The proposed approach demonstrates potential for achieving uniform propellant ablation and multidirectional thrust vector manipulation, constrained solely by engineering limitations. This approach can hold promise for extending mission durations significantly and offers unprecedented flexibility in satellites maneuverability across wide orbit inclinations for satellites of small form-factor.
In the following, in Section 2, the PPT principles of operations are discussed. In Section 3, the concept of the PPT with multiple spark plugs is introduced. In Section 4, the experimental setup parts, more specifically, the thruster head tested and the testing facility, are considered. Section 5 presents the methodology of the experiments conducted. In Section 6, the results of the experiments are unveiled. In Section 7, the extensive discussion on the results of the experiments and the proposals for the implementations of the results and the further investigations are presented. Section 8 presents the conclusion.
2. PPT Principles of Operation
There are different variants of the ablative PPT categorized based on its electrode configurations and the propellant type [14,15]. In this study, the coaxial geometry of the PPT that utilizes the solid-state propellant is considered. This type of propulsion is characterized by two main steps of thrust generation – the ionized particles generation, the process initiated by means of the surface discharge, and the electromagnetic and thermal acceleration of the propellant for thrust generation. The thrust-vectoring capability in this type of propulsion has been studied relatively extensively, and some of the approaches reached the level of flight-demonstration [4,7,16]. The following discussion on the principles of operation is devoted to the coaxial type pulsed plasma thrusters.
2.1. Discharge Ignition
Discharge ignition constitutes a core aspect of plasma-based propulsion systems, particularly pulsed plasma thrusters (PPT), fundamentally shaping their performance and efficiency [17,18,19]. In the case of PPT, the ignition process begins with the application of a high-voltage electrical pulse between two electrodes – an inner and outer – separated by a dielectric part usually fabricated from a polymer-based material serving as the propellant (see Figure 2). Upon exceeding a critical electric field intensity, surface-dispersed sparks appear across the dielectric’s boundary, initiating an evaporation and ablation sequence followed by ionization of the vaporized material. Subsequently, this ionized medium facilitates conduction of substantial electric currents, intensifying the degree of ionization in the evaporated and ablated propellant. This ionized medium forms a low-resistance plasma path bridging the electrodes, accompanied by intense localized heating and expansion of the ionized gas. Initially, the rate of propellant evaporation and ablation, , stems directly from the thermal energy, , released by the spark discharge. Thereafter, continued evaporation and ablation proceed at a rate, , driven by radiative heating, , emanating from the rapidly accelerating, ionized propellant stream traversing the discharge channel.
Several critical parameters profoundly influence the ignition process in pulsed plasma thrusters (PPTs). Primarily, electrode geometry determines the spatial distribution of electric fields. Carefully designed electrode configurations help minimize arc-related losses along the discharge channel while concentrating electric field lines within the active region, thereby optimizing initial evaporation and ablation of the propellant.
Over recent decades, researchers have investigated various strategies to enhance spark generation in PPTs (see Figure 3) [20,21]. Innovative approaches include the placement of spark plugs near the propellant surface (see Figure 3a), which improves local field strengths and triggers efficient ignition sequences. Insulated cables inserted through the outer electrode create sharper potential drops, focusing ignition events (see Figure 3b). Initial spark generation at the exhaust region utilizes downstream effects to augment propellant utilization (see Figure 3c). Embedding an insulated cable directly through the propellant reduces energy loss (see Figure 3d). Lastly, some advanced architectures utilize a third coaxial electrode dedicated to ignition, offering additional control over the ignition process (see Figure 3e). These methods collectively strive to refine the ignition process, minimizing inefficiencies and maximizing thrust output per unit charge delivered. Continued research explores hybrid solutions integrating these approaches to meet emerging demands in advanced space propulsion systems.
Secondly, dielectric properties play a crucial role since materials such as polytetrafluoroethylene or polyimide commonly serve as propellants due to their favorable electrical insulation properties and thermal stability resulting in an effective process of ablation and evaporation. Finally, ambient conditions such as pressure in the discharge channel, temperature of propellant and electrodes, and its composition also impact ignition behavior. Pressure alterations may facilitate easier breakdown initiation depending on the discharge channel geometry, whereas elevated temperatures accelerate gas ionization kinetics, reducing the necessary input energy.
Despite advancements in understanding of discharge ignition in PPT, challenges persist in achieving robust and reproducible ignition across diverse operating regimes. Fluctuations in the delay period between voltage application and actual spark formation introduce uncertainty into thrust generation cycles in a repeated high-frequency firings, potentially compromising overall performance of the thruster. Additionally, thermal gradients generated during ignition propagate through adjacent components, exacerbating mechanical stress and contributing to accelerated aging phenomena that may result in the unpredictable failure of the propulsion system.
Overall, the intricate interplay between geometric, material, and operational variables makes discharge ignition in PPTs a subject of ongoing research and developmental interest, and requires unconventional approaches for achieving the stable and predictable discharge ignition and thruster operation.
2.2. Thrust Generation
Ablative pulsed plasma thrusters refer to the electromagnetic and thermal types of electric propulsion systems distinguishing themselves through utilization of solid-state propellants [22]. The thrust in this type of propulsion system relies on brief bursts of concentrated energy to trigger ablation and evaporation events on the surface of the propellant leading ultimately to ionized plasma formation.
Initially, an external stimulus provides a targeted dose of energy, , directed towards the propellant surface (see Figure 4). This energy can be manifested via electrical arcs or precision-focused lasers, these inputs instigate localized temperature spikes sufficient enough to provoke phase transformations within microseconds on the surface of the propellant. Subsequent rapid ablation and evaporation ensue, culminating in the creation of a hot, dense cloud of charged particles characterized by elevated temperatures and pressures. Propelled forward by inherent thermodynamic forces – generating thermal part of the thrust, , – coupled with additional influence exerted by ponderomotive force – generating electromagnetic part of the thrust, , – this ionized medium expands dynamically throughout the interior cavity before exhausting from the thruster (see Figure 4). The main energy input into discharge, , is performed through the electrodes by means of heating the propellant, , by the current flowing through the ionized medium, , and through the ponderomotive force increasing the kinetic energy of the charged particles (see Figure 4).
To maximize efficacy of the thruster, engineering efforts can be focused on optimizing geometries associated with both channel and exhaust region.
Ablative PPT represents a system comprising an acceleration channel made up of two electrodes, an energy storage device usually implemented as a capacitor, a propellant, and an ignition device. After activation of the ignition device, when seed charge particles appear in the channel, the PPT can be represented as the equivalent electrical circuit (see Figure 5).
It is evident that damped oscillations will occur in such a circuit with initial voltage and zero current . Then, the operation of the pulsed plasma thruster can be described as follows. At the initial moment of time, when the voltage is high and there is still no current, electrons are accelerated in the acceleration channel perpendicular to the outlet direction (from one electrode to another) experiencing collisions with neutrals and ionizing them. In doing so, the expansion of the charge particles will only proceed under the action of gas-dynamic pressure gradient, which will not result in significant change in plasma volume due to the small characteristic timescale of the discharge – of the order of units of microseconds. As the discharge develops, the current flowing through the plasma increases, causing an increase in the induced magnetic field, which in turn deflects the trajectories of the charged particles, directing them beyond the boundaries of the channel. Thus, in first approximation, the process of propellant acceleration in PPT can be described using Newton’s Second Law:
where is the propellant mass in the channel, is the velocity of the substance flow, is the time of the propellant flow through the channel, is the inductance per unit length of electrodes, is the current.
In order to determine the propellant mass in the channel, the following empirical dependence can be used:
where is the empirically obtained coefficient, is the discharge energy.
The determination of the system current is possible by solving the loop equation:
where is the capacitance of the capacitor, is the resistance of the loop, is the inductance of the loop.
Solving the Equation (3) yields two solutions describing the aperiodic and periodic damping processes of current oscillations in the system. Since the operation of low-power PPT involves only periodic modes, it is appropriate to consider only the following solution:
where , , .
The main thrust characteristics for PPT are the impulse of force and specific impulse. The former can be obtained by integrating Equation (1) over time. It should be noted that can be described by the growing branch of a parabola of the following form:
where and are arbitrary coefficients.
It is because the value of inductance grows as the charged particles moves towards the channel exhaust region according to the kinematic law of plasma motion:
where is the initial moment of time, is the ending moment of time.
Based on the Equation (6), it should be noted that the thrust profile at the exhaust region of the PPT depends on the profile of the mass of the propellant ablated and evaporated at the moment of the discharge ignition.
The specific impulse of the PPT can be determined as follows:
The alternative form of notation of the Equation (6) and Equation (7) looks as follows:
where
2.3. Thrust-Vectoring Approaches in PPT
In recent years, thrust vector direction control has seen significant advancements in the field of electric propulsion [23,24,25]. Pulsed plasma thrusters with TVC can be a pivotal technology for precise spacecraft maneuvering. PPT operate by emitting short bursts of charge particles, unlike continuous flows in most of the types of electric propulsion [26]. Effective control over the orientation that can be provided by this type of thrusters may enhance satellites maneuverability, enabling precise adjustments in attitude, orbital corrections, and stabilization maneuvers [27].
Various strategies contribute to achieving thrust vector direction control in PPT [4]. There are three experimentally and in-orbit tested approaches for TVC in PPT (see Figure 6). Thrust vector direction control can be achieved by using two and more plasma sources within a single propulsion system (see Figure 6a). Such an approach is tested in space as the EO-1 thruster and demonstrates the capability to generate propulsive forces in two directions [7]. The multiple plasma sources can be integrated into single propulsion system having a common outer electrode providing capability of generating the distributed propulsive forces over the certain surface (see Figure 6b). Another approach of realizing TVC in PPT is the use of externally-applied magnetic field that guides the path of plasma jets, steering them along predetermined axes aligned with directional objectives (see Figure 6c). Incorporation of externally-applied magnetic field is demonstrated to facilitate enhanced directional control over escaping streams, ensuring optimal alignment relative to desired trajectory vectors.
Some prospective approaches for the realization of thrust-vectoring capability in PPT include the electrodes shape modifications and the modifications of the propellant density profile. The later approach is studied in this work by implementing the implementing of three spark plugs in three different locations over the surface of the solid-state propellant to generate uneven distributions of the propellant density in the channel that results in the nonuniform thrust profile generation at the exhaust region of the thruster.
3. PPT with Multiple Spark Plugs
3.1. Multiple Spark Plugs Approach for TVC
To increase the reliability and longevity and add the capability of controlling the direction of the thrust vector generated within a single thruster head, the pulsed plasma thruster utilizing solid-state propellant with multiple spark plugs is proposed (see Figure 7). The thruster consists of the following parts: the hollow outer electrode in inner cavity of which the hollow solid-state propellant is placed in the inner cavity of which the inner electrode is placed. The outer and inner electrodes constitute the coaxial channel along which the distance between the inner surface of the outer electrode and the outer surface of the inner electrode is equal. The coaxial channel that is formed by the outer and inner electrodes is closed at one end by the solid-state propellant. The other end is opened to the surroundings. The outer and inner electrodes have the electric connection with the main power supply. At the vicinity of the surface of the propellant, there are multiple through holes in the outer electrode through which the set of the spark plugs is inserted. The spark plugs are used to affect the surface of the propellant to cause the propellant ablation and evaporation and to generate initial charged particles. The spark plugs that constitute the set can be either electric or laser spark igniters. In case of the use of the electric spark plugs, its leading heads are located at the vicinity of the inner surface of the outer electrode cavity. In the case of the use of the laser spark igniters, their leading heads are located in the short distance from the inner surface of the outer electrode cavity to minimize the contamination of the laser spark igniters leading heads by the by-products after the discharge ignitions over the propellant surface. In addition, the laser spark igniters main axis can be at the angle to the surface of the propellant, whereas the main axis of the electric spark plug can be parallel to the surface of the propellant.
The spark plugs have the electric connection with the ignition power supply (see Figure 7). The ignition power supply is used to generate controlling signals on and provide the energy to the spark plugs. The number of ignition power supply can be equal to the number of spark plugs or can be in other variations to it. The number of spark plugs is limited by the engineering constraints to place the plugs within the through wholes of the outer electrode.
The number of plugs determine the number of the directions in which the thrust can be generated. The distribution of the spark plugs over the surface of the solid-state propellant allow to generate nonuniform profiles of the propellant densities that allow to control the thrust profile at the exhaust region. This results in the capability of controlling thrust vector direction.
The use of distributed spark plugs has several advantages that can become critical for extensive in maneuvers space missions of small satellites of the size less than 6U. Implementing multiple spark plugs positioned along the propellant surface in an ablative pulsed plasma thruster introduces substantial improvements in terms of performance, reliability, and adaptability. The primary advantage lies in achieving uniform ignition across the entire propellant area, thereby mitigating potential inconsistencies caused by uneven heating patterns. This results in more stable and predictable ablation processes, contributing directly to optimized plasma generation and subsequent thrust production. Considering the system as a whole, it results in the long-term predictability of the thruster operational characteristics and in the reduced risks of unstable work or failure of producing propulsive forces. It is achieved by that the use of distributed spark plugs allow to ablate and evaporate the propellant over the whole surface that results in that there will not be local excessive use of propellant in comparison to other surface regions. In addition, having redundant ignition points ensures continuity of operation even when certain components fail, thus increasing overall system resilience against failures and the impact from the external objects. Also, finely tuned control over individual spark plugs’ activation timings and intensities permits tailoring energy inputs precisely where needed, accommodating varied mission objectives ranging from low-thrust maneuvers to high-impulse bursts. Another key benefit that can be considered not only for the systems of small size stems from the ability to scale effectively. As thruster dimensions grow, centralized ignition mechanisms can become progressively inefficient, whereas distributed spark plugs can maintain their efficacy regardless of size. These cumulative advantages render multi-spark configurations highly preferable for modern spacecraft applications requiring versatile, reliable, and high-performance propulsion solutions.
3.2. Principles of Operations
It is possible to operate the spark plugs of the electric igniters type either using all the plugs permanently connected to the ignition power supply or using the plug switchers (see Figure 7). In the former case, the thruster is operated in the distributed discharge ignition mode (see Figure 7b). In the latter case, the thruster is operated in the thrust-vectoring control mode (see Figure 7c). In the case of the thruster operation in the distributed discharge ignition mode, it is supposed that the plugs generate the sparks alternatively (see Figure 8). That means that at each moment of time, some plugs are in operation while at other moments they are out of use. Thus, the plugs can be operated with the distributed working load that can result in its even wearing and the even utilization of the surface of the propellant. The alternative activation of the plugs is supposed to be self-sustained process that is not controlled by the external actions.
The approach by which the thrust-vectoring is realized in the proposed thruster is the electromagnetic (see Figure 9). That means that the thrust vector direction is controlled by means of the electrical and magnetic fields. More specifically, these fields allow to alter the propellant density inside the channel and alter the acceleration of the propellant within the annular projection of the thruster.
The control of the thrust vector direction by alterations in the propellant density in the channel of the PPT physically is realized in that the nonuniform profile of propellant density generated over the surface of propellant at the initial moment of time creates the nonuniform conditions for the subsequent propellant acceleration both by thermal and electromagnetic forces. This nonuniform conditions are mainly related to that the inconsistent propellant density constitutes different profiles of charged particles density and electrical conductivity within the annular projection of the channel. This results in unequal heating and ponderomotive force effects on this particle. Thus, the charged and neutral particles occurring in the channel at the specific time are accelerated unequally resulting in the nonuniform profiles by speed and mass flow rates at the exhaust region of the thruster. The nonuniformity of the ablated and evaporated propellant mass at the initial moment of the discharge ignition effect on the thrust is supported by the Equation (6). The thrust level generated by the propulsion system is higher at the side where the density of the propellant is higher (see Figure 9).
The approach of realization of the thrust vector direction control in the pulsed plasma thruster is more advanced than its analogs – the PPT with TVC realized by geometric and electromagnetic approaches. The adoption of multiple spark plugs for thrust vector control in pulsed plasma thrusters represents a paradigm shift away from previous reliance on the use of the multiple plasma sources and the magnetic field approaches. Unlike magnet-based strategies, spark plugs facilitate direct and localized initiation of plasma discharges, yielding better levels of responsiveness and precision in steering the trajectories of charged particles. This direct actuation mechanism eliminates intermediate steps involved in generating magnetic fields, ensuring swift reaction times critical for dynamic flight regimes. Additionally, the elimination of bulky electromagnets or permanent magnets and its ancillary power supply units substantially streamlines system integration efforts, reducing weight penalties that can be unacceptable for the satellites of the size less than 6U. Flexible positioning possibilities offered by spark plugs empower tailoring of the layouts specifically suited to unique mission profiles, unlocking new frontiers in propulsive optimization that is critical for the missions at the proximity of the deep space natural objects. Furthermore, minute adjustments afforded by timed spark intervals yield unsurpassed directional control fidelity that is largely impractical through global variations imposed by external magnetic fields. Complementing these functional gains is the notable reduction in energy expenditure enabled by the discontinuous nature of spark activity versus sustained current flows demanded by electromagnet arrangements. In addition, the use of the multiple spark plugs prevents the unwanted use of the energy of small satellite to power the attitude determination and control system that should prevent the rotations generated by the electromagnets or permanent magnets in the case of the mission operation at the proximity to the natural space objects that have its own magnetic fields. Thus, the convergence of these factors renders multiple spark plugs not merely competitive but downright transformative for advancing the state-of-the-art in pulsed plasma thruster technologies.
4. Experimental Setup
4.1. Thruster Head
The thruster head under examination features a cylindrical structure composed primarily of a hollow outer electrode crafted from copper (see Figure 10). Measuring 22 mm externally and 20 mm internally, this electrode houses a central void filled with a specialized solid-state propellant – the polyacetal spacer. The spacer itself possesses an outer diameter matching the interior dimension of the outer electrode, creating a tight fit. Encased within the spacer resides an inner electrode constructed from tungsten, exhibiting an outer diameter of just 3 mm. Together, these components constitute a coaxial channel. This channel spanning a length of 20 mm. Integrally linked to the structural layout are three holes, each measuring 6 mm in diameter, bored symmetrically into the exterior wall of the outer electrode. The holes are located at the proximity to the surface of the propellant. Embedded within these openings reside three spark plugs of electrical type. These spark plugs play a pivotal role in determining the directions of the thrust vector. These three plugs allow the generation of thrust vectors in seven distinct directions. Electrically, the outer and inner electrodes connect directly to a main power supply through the capable and are supplied with the voltages between 1 to 5 kV. Meanwhile, the spark plugs themselves receive their activation signal from a separate ignition power supply, delivering voltages up to 30 kV. The exterior of the thruster head tested with the indication of the spark plugs locations is shown in Figure 11.
This laboratory thruster head serves as a model platform for demonstrating the operations of the pulsed plasma thruster in a self-automated spark plugs ignition mode and for the demonstration of the capability of generating propulsive forces in several directions.
The studied thruster head is dedicated to the use aboard small satellites engaged in the dynamic spaceflight operations supporting the functioning of the proliferated space systems. The proposed system consisting of multiple spark plugs consumes less than 1% of total power for ignition, making them highly energy-efficient. Additionally, this system occupies approximately 10% of the volume of the entire propulsion system for satellites smaller than 6U, contributing to increased payload mass.
4.2. Testing Facility
The scheme of the testing facility is shown in Figure 12. The facility is designed to conduct experiments under space-simulated conditions and perform high-resolution data acquisition for a variety of applications related to the propulsion systems development. The vacuum chamber has a diameter of 500 mm and a length of 500 mm, providing sufficient space for small-scale experimental samples including small size propulsion systems and satellites. The equipment of the chamber allows maintaining precise control over environmental parameters like pressure and temperature. A turbomolecular pump with a pumping speed of 0.145 m³/s ensures ultra-high vacuum levels. The fore-vacuum system with a pumping speed of 5.56 × 10⁻³ m³/s supports initial evacuation before engaging the main turbomolecular pump, enhancing overall efficiency during experiment preparation stages. Two oscilloscopes - Tektronix TDS 2024B and Hantek - capture electrical signals from independent Rogowski coils for controlling operation of main and ignition power supplied to the spark plugs and the main electrodes. An in-house-built main power supply allow to provide stable voltage between 1 to 5 kV and current up to 1 kA necessary for running the thruster head. Two high-speed cameras model Miro M320S captures fast-moving discharge ignition events happening inside the channel of the thruster head.
5. Methodology
All experiments are performed under a vacuum environment with a pressure maintained around 10-4 Pa providing optimal conditions for studying ignition processes. Three different operation modes are implemented: firstly, a permanent connection mode where spark plugs remained constantly linked to the ignition power supply, enabling demonstration of self-automated multi-spark alternating ignition with the main discharge and without the main discharge. Secondly, a switcher-controlled firing mode allowed selective triggering of the dedicated spark plugs, facilitating controlled adjustments of the thrust vector direction.
In determining the number of firings for each spark plug, a high-speed camera is placed in front of the thruster head’s exhaust channel. An initial number of impulses is established before setting appropriate voltages for spark plugs and the main discharge. Once the system is initiated, each spark event is detected by signals from a Rogowski coil. Concurrently, the camera captures images every time the ignition power supply engaged the spark plugs (see Figure 13). After completing the experiments, images and data collected by the oscilloscope are consolidated and analyzed to determine the frequency of firings per spark plug during each test run.
Additional experiments focus on evaluating the capability to control the thrust vector direction. For these trials, the camera is positioned perpendicular to the thruster head’s thrust axis. Experiments are proceeded in single-pulse mode, with defined voltages applied to the dedicated spark plugs and the main discharge. At the moment of firing, the camera takes a picture. Visual inspection of the exhaust plume images then permits determination of any directional changes of the thrust vector.
6. Results
In the experiments, the capabilities of achieving the self-automated spark plugs firings and the thrust-vectoring capability by using the selective plug are demonstrated. Collectively, these results validate the utility of multiple spark plugs for enhancing ignition reliability and enabling versatile thrust vector control for small satellite propulsion systems.
6.1. Discharge Ignition Using Multiple Spark Plugs
To investigate the ignition behavior of the proposed multiple spark plugs configuration, the discharge patterns under different conditions are analyzed. In the first set of experiments, the discharge igniting spark plugs are determined for the case when the main discharge voltage is not applied. It is determined that spark generation can be realized by individual spark plugs (SP1, SP2, SP3) firings when no voltage is applied to the outer and inner electrodes (see Figure 14). Each initial ignition occurs locally at the corresponding plug location, showing that the ignition process is properly localized and isolated. In some moments of time, multiple plugs fire simultaneously (see Figure 15), the discharge patterns reveal interesting interactions. Despite simultaneous ignition, the sparks do not interfere destructively; instead, they overlap constructively, forming a coherent ignition front. This suggests that the multiple spark plugs cooperate effectively, enhancing the overall ignition reliability.
Under typical operating conditions, with the main discharge voltage applied to the electrodes, the scenario becomes more complex (see Figure 16). Here, the main discharge glow appears prominently, before complemented by localized spark emissions from the plugs. The combination of main discharge and localized sparks reveals a balanced interaction, where the plugs assist in sustaining and distributing the discharge uniformly. It is noticed that in the case of the main discharge applied to the electrodes, the occurrence of multiple spark plugs simultaneous firings is prevailing over the single spark plug firings.
6.2. Thrust Vector Control Using Multiple Spark Plugs
Realizing thrust vector control in pulsed plasma thrusters necessitates careful management of the discharge current. To achieve directional control, the current must be adjusted to promote thermal acceleration rather than homogeneous surface discharge. This allows for tailored ablation profiles and asymmetric thrust generation.
Visual evidence from Figure 17 substantiates this approach. In the case of simultaneous spark plugs firings or in the case of the electromagnetic acceleration prevalence over the thermal acceleration – that is registered by controlling the discharge current, – the exhaust plasma flow remains symmetric, reflecting uniform ignition across the propellant surface (Ssee Figure 17a). However, introducing non-uniform ignition selectively alters this symmetry. Activating specific spark plugs (see Figure 17b) produces inclined flows, clearly demonstrating the capacity for directional control. This finding underscores the effectiveness of the multiple spark plugs approach in achieving thrust-vectoring capability.
7. Conclusions
Statistical conclusions regarding the random nature of spark plug ignitions are derived primarily from electrical diagnostic techniques involving current measurements (see Figure 18). The electrical diagnostics included the Rogowski coils used for each spark plug power supply cable independently. Another method used for determining the statics of the spark plug ignitions is camera-based approach. This method is proved sufficiently sensitive though given the extremely short ignition times (500 ns) and minimum exposures required for visual clarity exceeded acceptable limits (~20 μs). it is possible to determine the initial place of the discharge ignition based on the pictures taken (see Figure 19). By the camera used, it is possible to get pictures of the moments of the discharge ignition, the main discharge glowing, and the after-discharge electrodes destruction (see Figure 19).
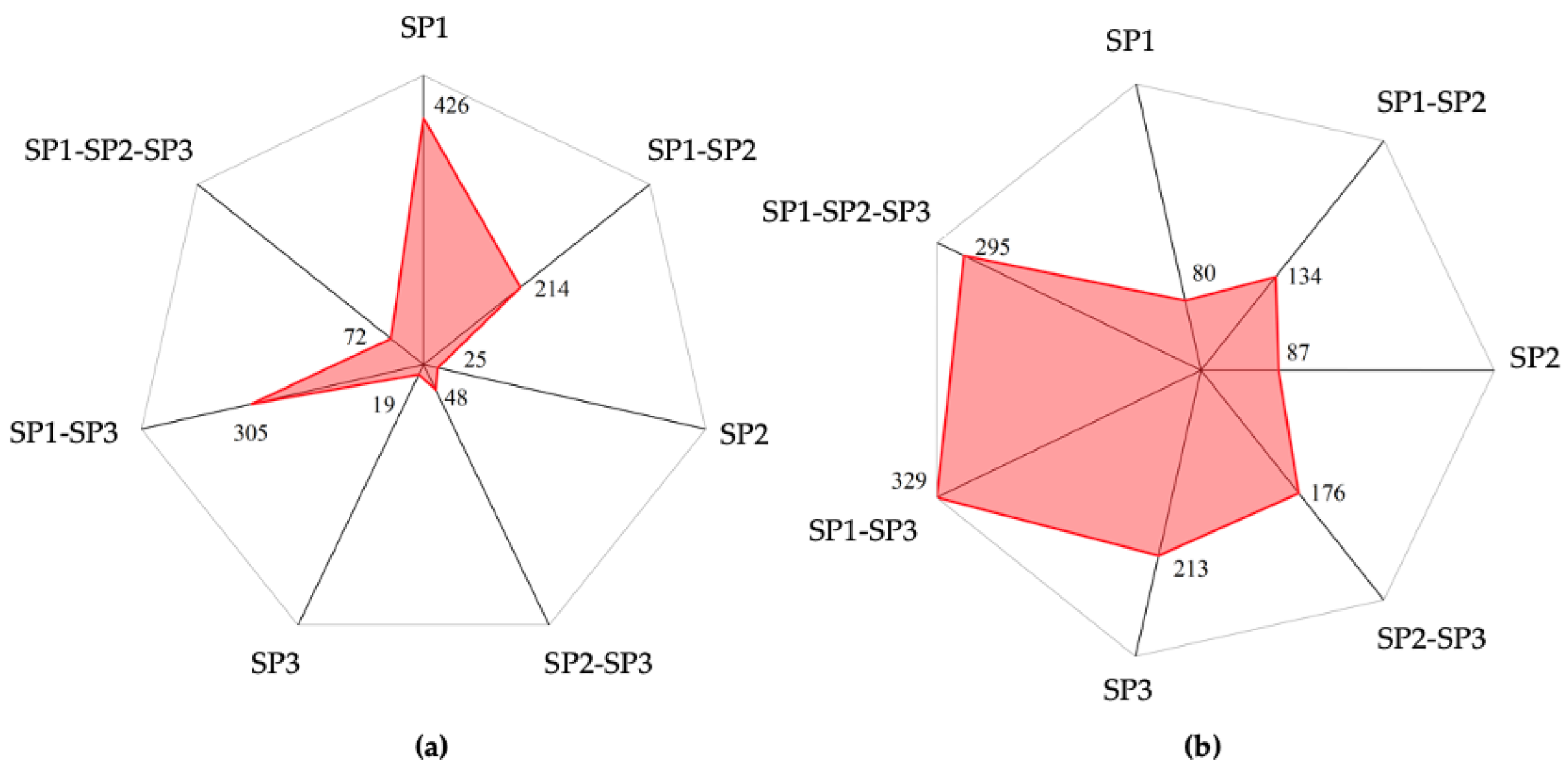
It is revealed that without applying a main discharge voltage, the ignition sequence of spark plugs follows a random pattern though it is not as distinctive as for the case when the main discharge is applied (see Figure 20). So, for 1109 total ignitions without main discharge voltage applied, the first, second, and the first and third plugs simultaneously show the greatest number of times of ignition. For 1314 total ignitions with the main discharge voltage applied to the electrodes, the first and third plugs simultaneously ignited more frequently than other combinations. At the first instance, the results obtained prove the capability of using the plugs variationally in the self-automated mode. Also, the results obtained imply that although randomness may prevail under certain conditions, precision in the fabrication process - both in terms of spark plug design and socket alignment - is crucial for optimal operation. Even when employing main discharge, randomness might persist, highlighting the need for rigorous prelaunch adjustments and exacting standards during production. The studied configurations for the spark plug assembling ensure more uniform ignition patterns. By opting for manual commutation instead of automatic systems, it is found that complete control over the ignition process could be achieved. This approach also offers potential benefits for finely tuning the directionality of thrust vectors, enabling targeted ignition of individual spark plugs where needed.
In cases where controlled ignition is not essential, implementing a reserve set of spark plugs emerges as a viable solution. Automatic or manual switching mechanisms provide redundancy against failures caused by breakage or abnormal resistances. Such strategies can enhance reliability and extend operational lifespan.
Experiments highlighted the significance of maintaining uniform fuel flows when incorporating spring-loaded valves. Preventing valve jamming directly correlates with achieving stable combustion processes and prolonged service life.
8. Conclusions
This study contributes valuable knowledge toward organization of reusable proliferated space systems of small satellites by improving operations of pulsed plasma thrusters. These improvements include improvement of the organization of the discharge ignition in the PPT by using the distributed spark plug systems with the improved dependability, controllability, and overall performance characteristics. Also, the proposed approach of using the distributed spark plug allow to control the thrust vector directions. In addition, by leveraging multiple discharge igniters, it is possible to mitigate risks associated with single-point failure modes.
The use of multiple discharge igniters ensures reliable long-term operations for dynamic space missions. These igniters can consume less than 1% of total power for ignition, making them highly energy-efficient. Additionally, they occupy approximately 10% of the volume of the entire propulsion system for satellites smaller than 6U, contributing to increased payload mass. Achieving self-automation has been demonstrated by connecting multiple spark plugs in parallel to the ignition power source. Furthermore, the implementation of multiple discharge igniters enables thrust-vectoring capabilities in ablative pulsed plasma thrusters. To realize this feature, it is necessary to reduce the discharge current so that there isn’t an even distribution of surface discharge over the propellant surface but instead operates in thermal acceleration mode.
To further improve ignition consistency, it is proposed testing different spark plugs and the ways of its insertion into the discharge channel. Future research directions include refining predictive models linking physical parameters such as electrode spacing and material properties with ignition results, thereby paving the way for next-generation models of pulsed plasma thrusters.
Author Contributions
Conceptualization, A.S., A.P., and D.F.; methodology, A.P. and D.F.; software, A.P.; validation, A.S., A.P., and D.F.; formal analysis, A.P. and D.F.; investigation, A.P., D.F., and N.T.; resources, A.S., A.P., and D.F.; data curation, A.P. and D.F.; writing—original draft preparation, A.S., A.P., and D.F.; writing—review and editing, A.S.; visualization, A.S. and A.P.; supervision, A.S. and A.P.; project administration, A.S. and A.P.; funding acquisition, A.S. and A.P. All authors have read and agreed to the published version of the manuscript.
Funding
This work was performed using research facilities cluster “Beam-M” of Bauman Moscow State Technical University following the government task by the Ministry of Science and Higher Education of the Russian Federation (FSFN-2024-0007).
Data Availability Statement
The data used in this research can be made available upon reasonable request to the corresponding author.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Chintalapati, B.; Precht, A.; Hanra, S.; Laufer, R.; Liwicki, M.; Eickhoff, J. Opportunities and challenges of on-board AI-based image recognition for small satellite Earth observation missions. Adv. Space Res. 2025, 75(9), 6734–6751. [CrossRef]
- Yaqoob, M.; Lashab, A.; Vasquez, J.C.; Guerrero, J.M.; Orchard, M.E.; Bintoudi, A.D. A comprehensive review on small satellite microgrids. IEEE Trans. Power Electron. 2022, 37(10), 12741–12762. [CrossRef]
- Ben-Larbi, M.K.; Pozo, K.F.; Haylok, T.; Choi, M.; Grzesik, B.; Haas, A.; Stoll, E. Towards the automated operations of large distributed satellite systems. Part 1: Review and paradigm shifts. Adv. Space Res. 2021, 67(11), 3598–3619. https://10.1016/j.asr.2020.08.009.
- Shumeiko, A.; Telekh, V.; Ryzhkov, S. Thrust-vectoring schemes for electric propulsion systems: A review. Chinese J. Aeronaut. 2025, 38(6), 103401. [CrossRef]
- Levchenko, I.; Baranov, O.; Keidar, M.; Riccardi, C.; Roman, H.E.; Xu, S.; Alexander, K. Additive technologies and materials for the next-generation cubesats and small satellites. Adv. Func. Mater. 2024, 34(45), 2407602. [CrossRef]
- Bernard, D.E.; Abelson, R.D.; Johannesen, J.R.; Lam, T.; McAlpine, W.J.; Newlin, L.E. Europa planetary protection for Juno Jupiter orbiter. Adv. Space Res. 2013, 52(3), 547–568. [CrossRef]
- Zakrzwski, C.; Benson, S.; Sanneman, P.; Hoskins, A. On-orbit testing of the EO-1 pulsed plasma thruster. In Proceedings of the 38th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2002; Paper No. 3973. [CrossRef]
- Tsay, M.; Model, J.; Barcroft, C.; Frongillo, J.; Zwahlen, J.; Feng, C. Integrated testing of iodine BIT-3 RF ion propulsion system for 6U cubesat applications. In Proceedings of the 35th International Electric Propulsion Conference, Georgia Institute of Technology, Atlanta, GA, USA, August 2017; pp. 8–12.
- Shumeiko, A.; Pashaev, A.; Savelev, P.; Telekh, V. In-orbit demonstration of bi-directional electrodeless plasma thruster. In Proceedings of the IAF Space Propulsion Symposium; International Astronautical Federation: Milan, Italy, October 2024; pp. 358–366. [CrossRef]
- Bellomo, N.; Magarotto, M.; Manente, M.; Trezzolani, F.; Mantellato, R.; Cappellini, L.; Paulon, D. Design and In-orbit Demonstration of REGULUS, an Iodine Electric Propulsion System. CEAS Sp. J. 2022, 14, 79–90. [CrossRef]
- Savelev, P.; Shumeiko, A.; Telekh, V. Wire-Based Solid-State Propellant Management System for Small Form-Factor Space Propulsion. Invent. 2025, 10(5), 75. [CrossRef]
- Barquero, S.; Navarro-Cavallé, J.; Merino, M. Reconstruction of the transient plume cross-section of a pulsed plasma thruster. Plasma Sources Sci. Technol. 2025, 34(5), 055003. [CrossRef]
- Ou, Y.; Wu, J.; Cheng, Y.; Zhang, Y.; Che, B. Design and Performance of a Micro-Pulsed Plasma Thruster Used in Miniaturized Satellites. Adv. Space Res. 2024, 74(4), 1741–1750. [CrossRef]
- Aoyagi, J.; Yamada, M.; Tezuka, T.; Watanabe, R.; Otsuki, T.; Takeya, S. Series Development of Coaxial Pulsed Plasma Thruster from 1 J to 8 J. J. Electr. Propuls. 2025, 4(1), 38. [CrossRef]
- Organski, L.; Jeffers, B.; Gresham, P.; Kucharewicz, A.; Shashurin, A. Low-Voltage Operation Mode of ASCENT-Propelled Pulsed Plasma Thruster. AIP Adv. 2025, 15(2). [CrossRef]
- Schäfer, F.; Herdrich, G.; Zhe, Z. In-Orbit Testing of the Petrus Pulsed Plasma Thruster on the Greencube 3U Cubesat. In Proceedings of the 8th International Conference on Space Propulsion; French Aerospace Society (3AF): Bordeaux, France, May 2022.
- Shumeiko, A.; Telekh, V.; Ryzhkov, S. Starting Modes of Bidirectional Plasma Thruster Utilizing Krypton. Symmetry 2023, 15(9), 1705. [CrossRef]
- Shumeiko, A.; Andronov, A.; Pashaev, A.; Savelev, P.; Telekh, V. Starting Modes of Multidirectional Electrodeless Plasma Thruster with Closed Ring-Shaped Gas Discharge Chamber. Scientific Rep. 2025. [CrossRef]
- Fu, H.; Wu, Z.; Huang, T.; Hu, T.; Zhang, S. Influences of Initial Voltage and Electrode Size on Propellant Surface Evolution in a Coaxial Pulsed Plasma Thruster. Acta Astronaut. 2024, 222, 573–585. [CrossRef]
- Ling, W.; Liang, Y.; Zhang, S.; Huang, M.; Quansah, J.; Liu, X.; Wang, N. A Brief Review of Alternative Propellants and Requirements for Pulsed Plasma Thrusters in Micropropulsion Applications. Chinese J. Aeronaut. 2020, 33(12), 2999–3010. [CrossRef]
- Ou, Y.; Wu, J.; Cheng, Y.; Zhang, Y.; Che, B. Design and Performance of a Micro-Pulsed Plasma Thruster Used in Miniaturized Satellites. Adv. Space Res. 2024, 74(4), 1741–1750. [CrossRef]
- Levchenko, I.; Baranov, O.; Pedrini, D.; Riccardi, C.; Roman, E.; Xu, S.; Lev, D.; Bazaka, K. Diversity of Physical Processes: Challenges and Opportunities for Space Electric Propulsion. Appl. Sci. 2022, 12(21), 11143. [CrossRef]
- Shumeiko, A.; Telekh, V.; Mayorova, V. Development of a Novel Wave Plasma Propulsion Module with Six-Directional Thrust Vectoring Capability. Acta Astronaut. 2022, 191, 431–437. [CrossRef]
- Shumeiko, A.; Telekh, V. Direct Thrust Measurements of 2U-Sized Bi-Directional Wave Plasma Thruster. AIP Adv. 2023, 13(8), 085106. [CrossRef]
- Andronov, A.; Shumeiko, A.; Pashaev, A.; Tsygankov, P.; Kovalev, S.; Telekh, V. Plume Characterization of Electrodeless Plasma Thruster with Configurable Exhaust. Symmetry 2025, 17(5), 661. [CrossRef]
- Dosbolayev, M.; Igibayev, Z.; Usenov, Y.; Suleimenova, A.; Aldabergenova, T. Study of the design and characteristics of a modified pulsed plasma thruster with graphite and tungsten trigger electrodes. Appl. Sci. 2025, 15(19), 10767. [CrossRef]
- Dosbolayev, M.; Igibayev, Z.; Yertayev, O. Experimental study of a planar solid-propellant pulsed plasma thruster using graphite. Aeronaut. Aerosp. 2026, 13(1), 63. [CrossRef]
Figure 1.
Dynamic mission proposal based on highly-maneuverable satellites. The symbols , , denote onboard technological process times.
Figure 1.
Dynamic mission proposal based on highly-maneuverable satellites. The symbols , , denote onboard technological process times.
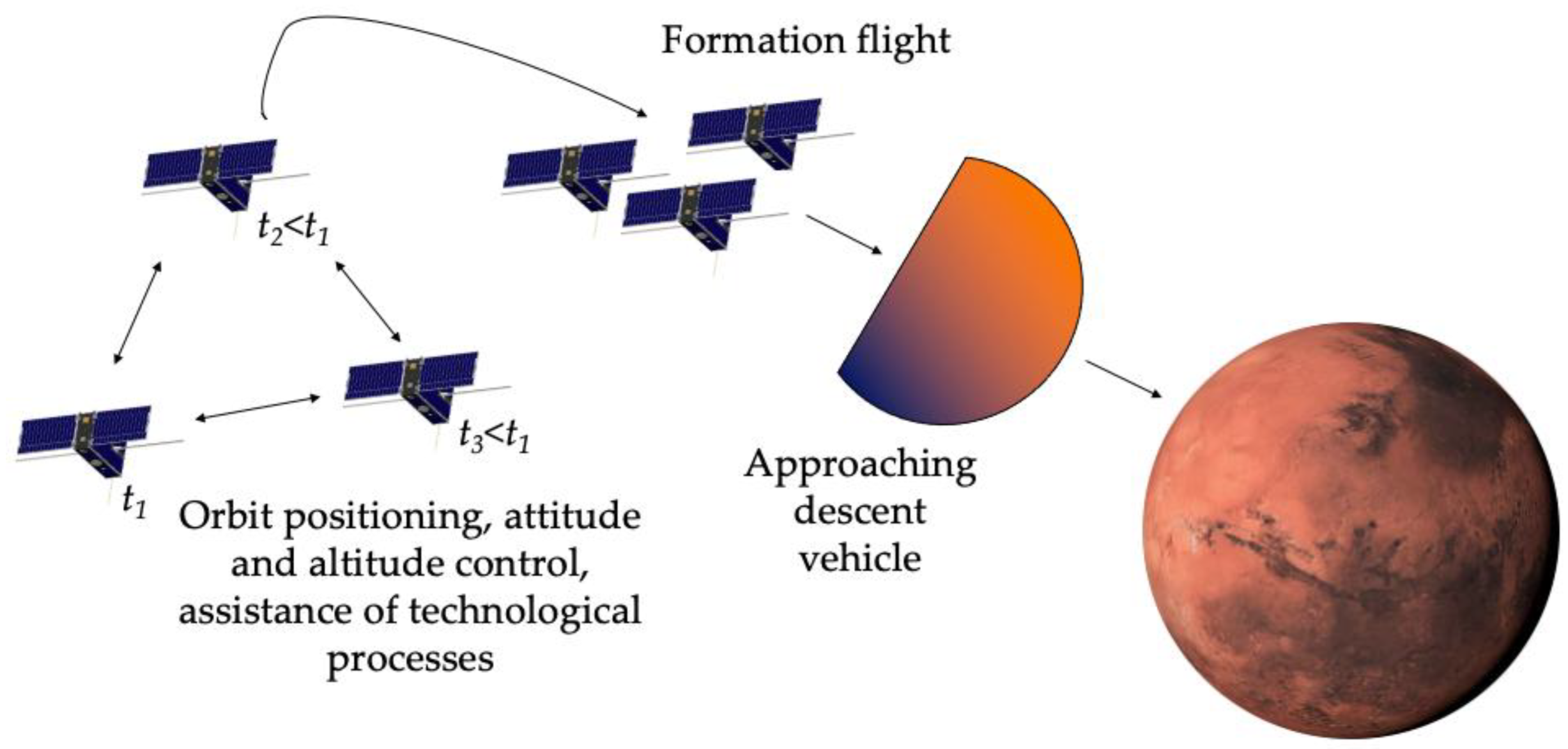
Figure 2.
Representation of mechanisms responsible for solid-state propellant ablation taking place in PPT.
Figure 2.
Representation of mechanisms responsible for solid-state propellant ablation taking place in PPT.
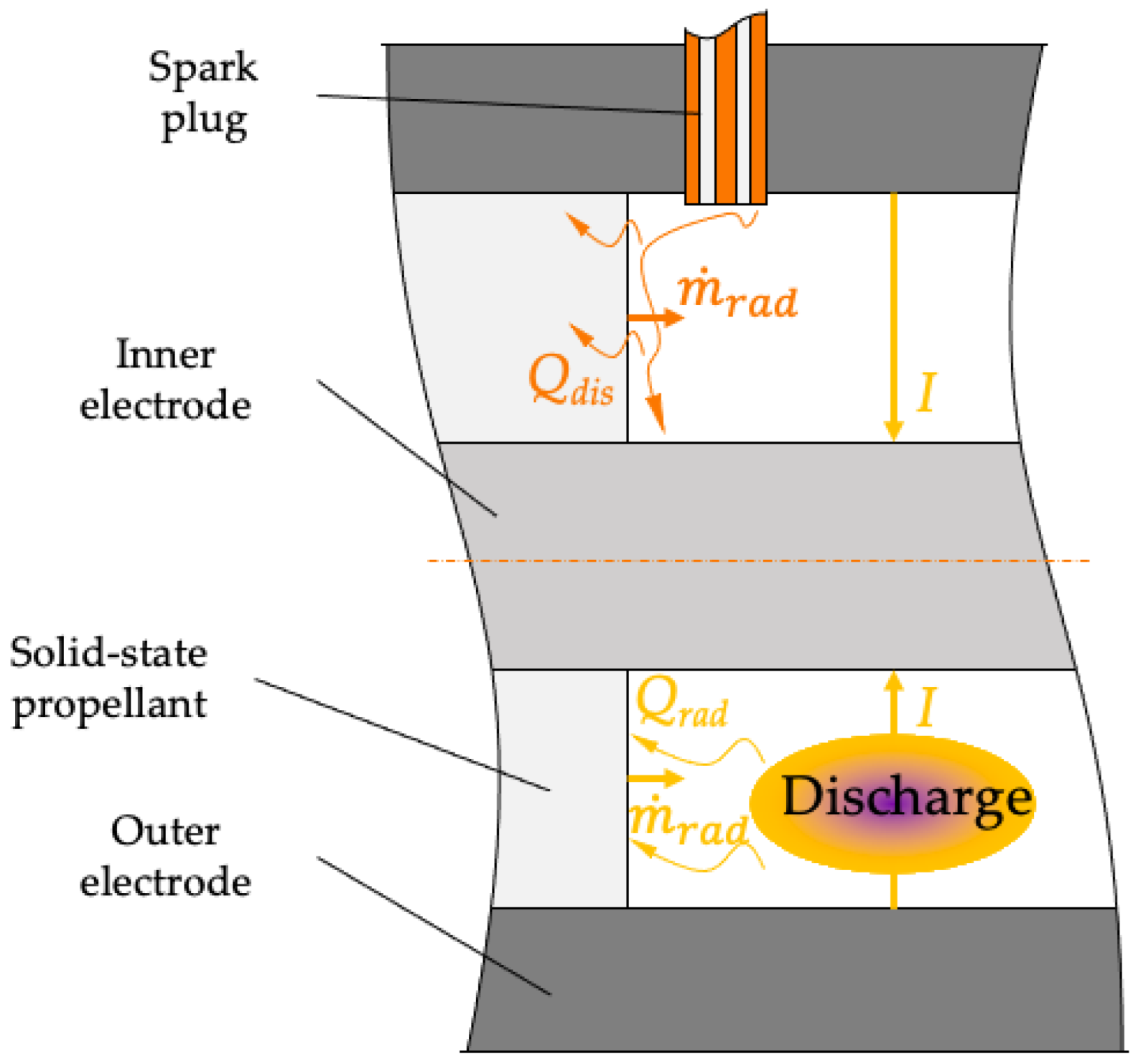
Figure 3.
Schemes of discharge ignition approaches realization in PPT: (a) use of spark plug for discharge initiation; (b) use of insulated cable inputted into discharge ignition zone through outer electrode; (c) use of insulated capable inputted into ignition zone through hollow inner electrode which has insulator in its inner cavity; (d) use of insulated cable inputted through propellant; (e) use of third coaxial electrode placed between outer and inner electrodes of PPT for discharge ignition.
Figure 3.
Schemes of discharge ignition approaches realization in PPT: (a) use of spark plug for discharge initiation; (b) use of insulated cable inputted into discharge ignition zone through outer electrode; (c) use of insulated capable inputted into ignition zone through hollow inner electrode which has insulator in its inner cavity; (d) use of insulated cable inputted through propellant; (e) use of third coaxial electrode placed between outer and inner electrodes of PPT for discharge ignition.
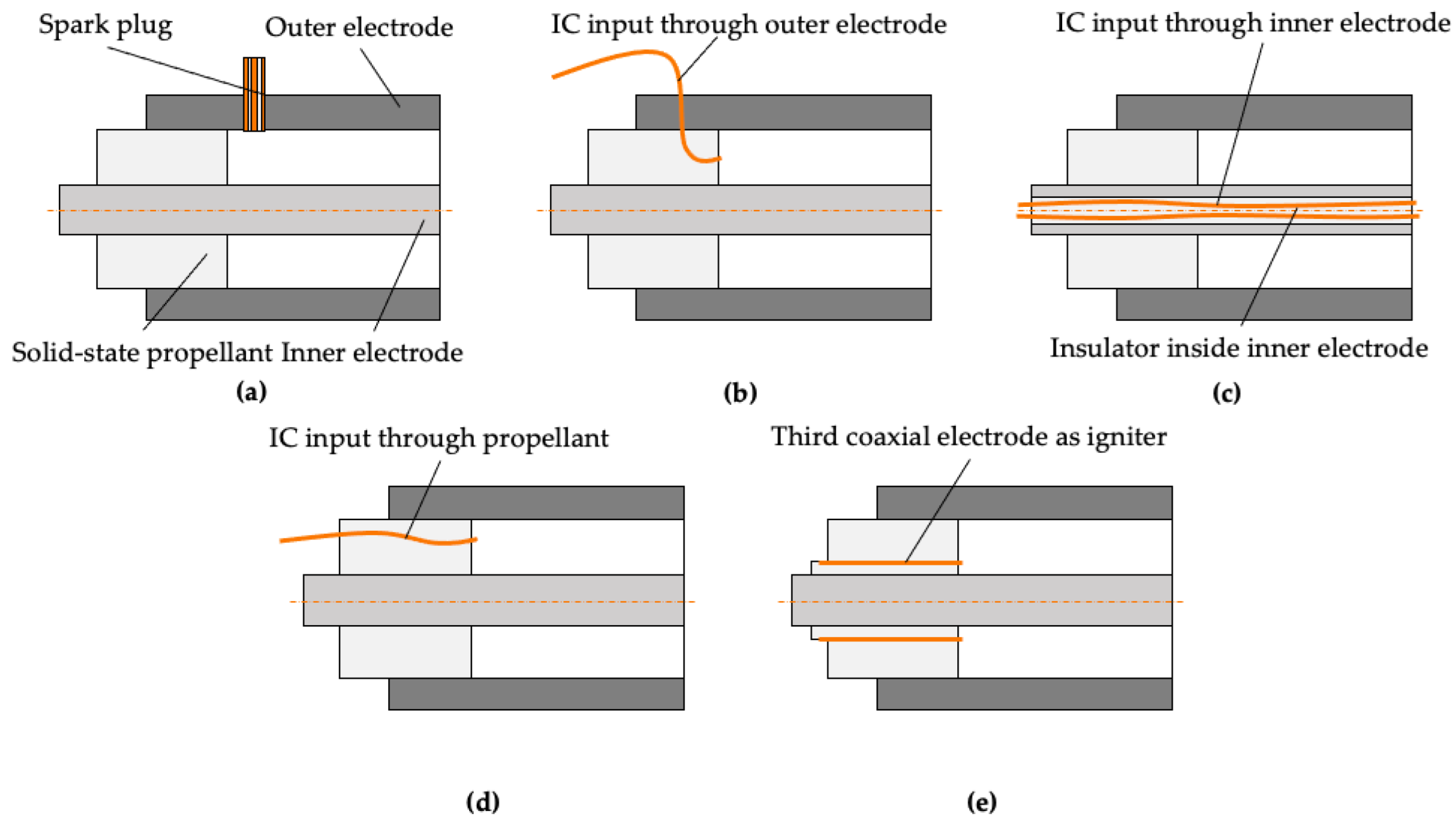
Figure 4.
This is a figure. Schemes follow the same formatting.
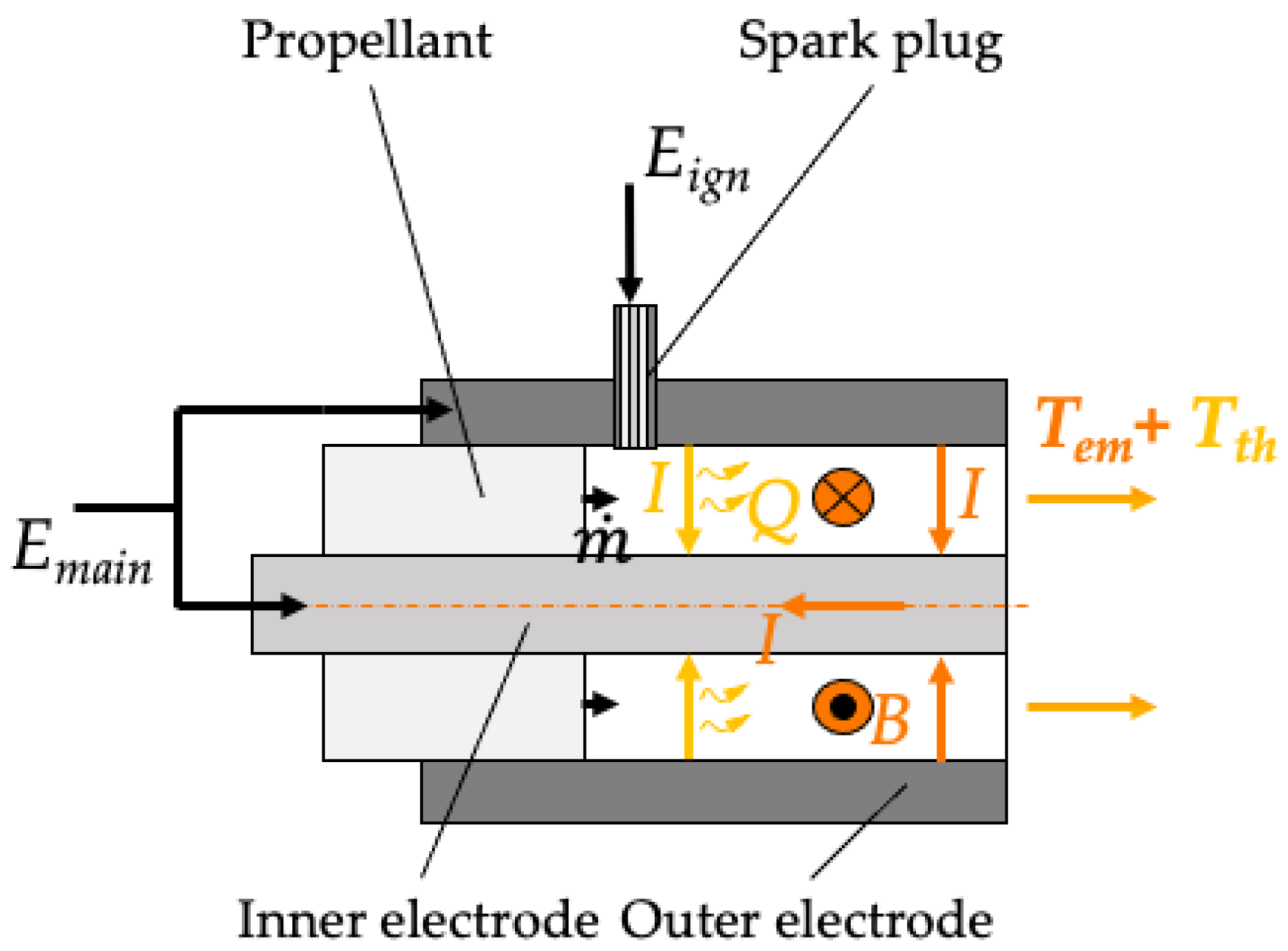
Figure 5.
Equivalent scheme of PPT channel.
Figure 6.
Schemes of thrust-vectoring realization in PPT: (a) thrust-vectoring capability realized using multiple thruster heads of PPT type within single propulsion system that axes are not collinear; (b) thrust-vectoring capability realized based on use of distributed within single plane thruster heads; (c) use of magnetic nozzle with tilting magnetic field for thrust vector direction control.
Figure 6.
Schemes of thrust-vectoring realization in PPT: (a) thrust-vectoring capability realized using multiple thruster heads of PPT type within single propulsion system that axes are not collinear; (b) thrust-vectoring capability realized based on use of distributed within single plane thruster heads; (c) use of magnetic nozzle with tilting magnetic field for thrust vector direction control.
Figure 7.
Proposed PPT with multiple electric spark plugs: (a) discharge channel; (b) electric circuit organization for discharge ignition mode without thrust-vectoring capability; (c) electric circuit organization for discharge ignition mode for achieving thrust-vectoring capability.
Figure 7.
Proposed PPT with multiple electric spark plugs: (a) discharge channel; (b) electric circuit organization for discharge ignition mode without thrust-vectoring capability; (c) electric circuit organization for discharge ignition mode for achieving thrust-vectoring capability.
Figure 8.
Representation of uniform discharge ignition in proposed PPT with multiple spark plugs.
Figure 9.
Representation of thrust-vectoring capability by using multiple spark plugs.
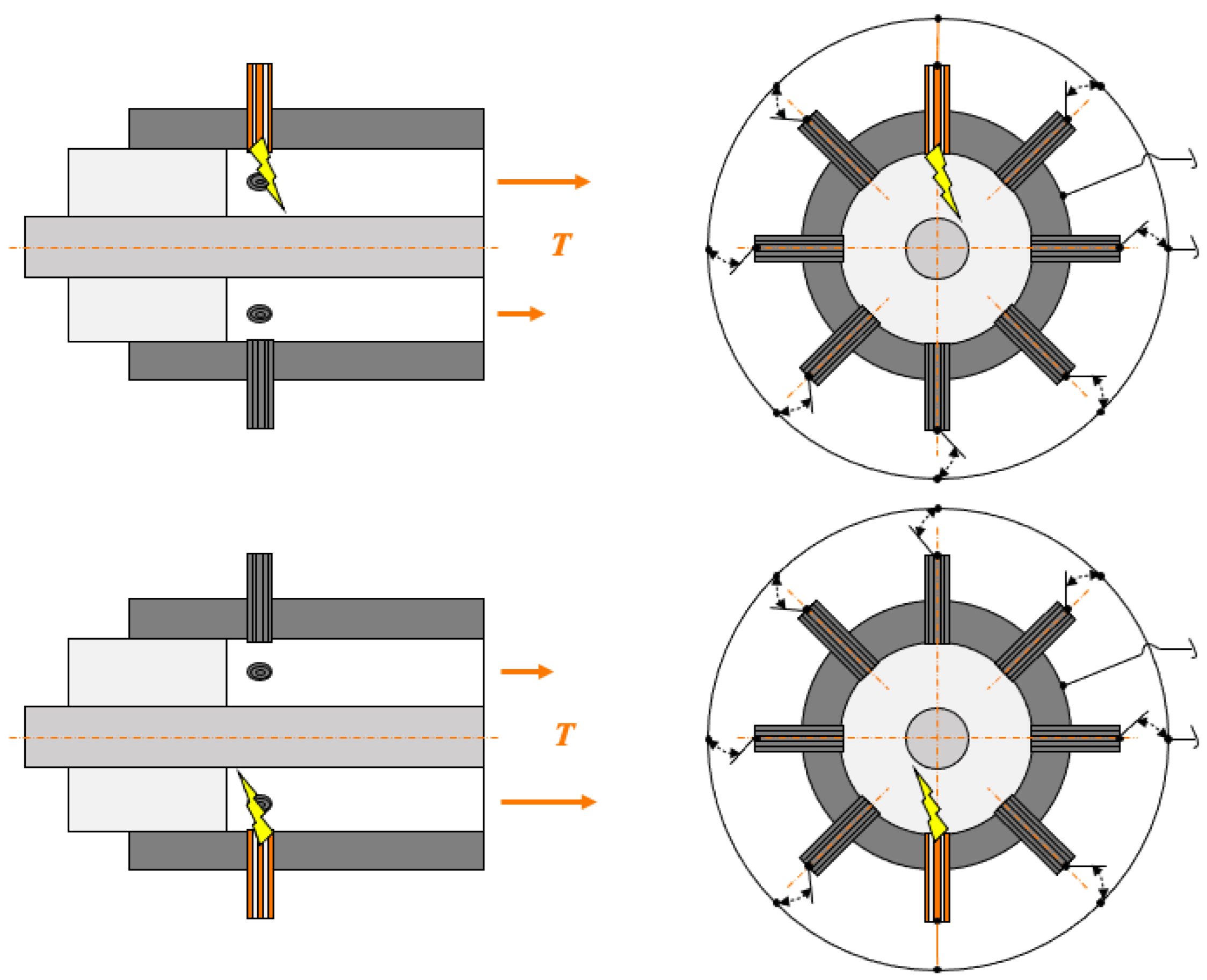
Figure 10.
Scheme of thruster head tested.
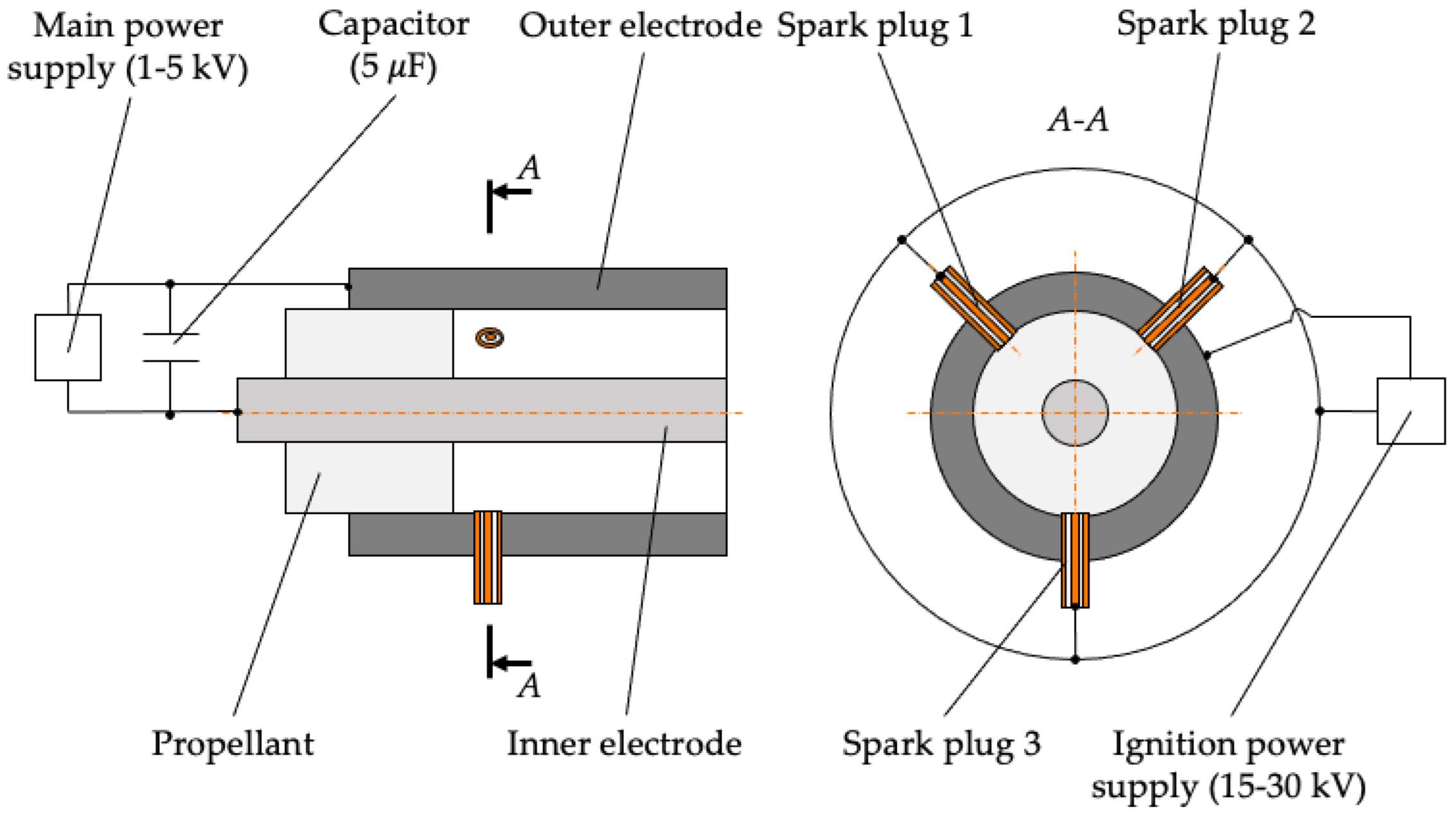
Figure 11.
Thruster head in vacuum chamber with indication of spark plugs locations.
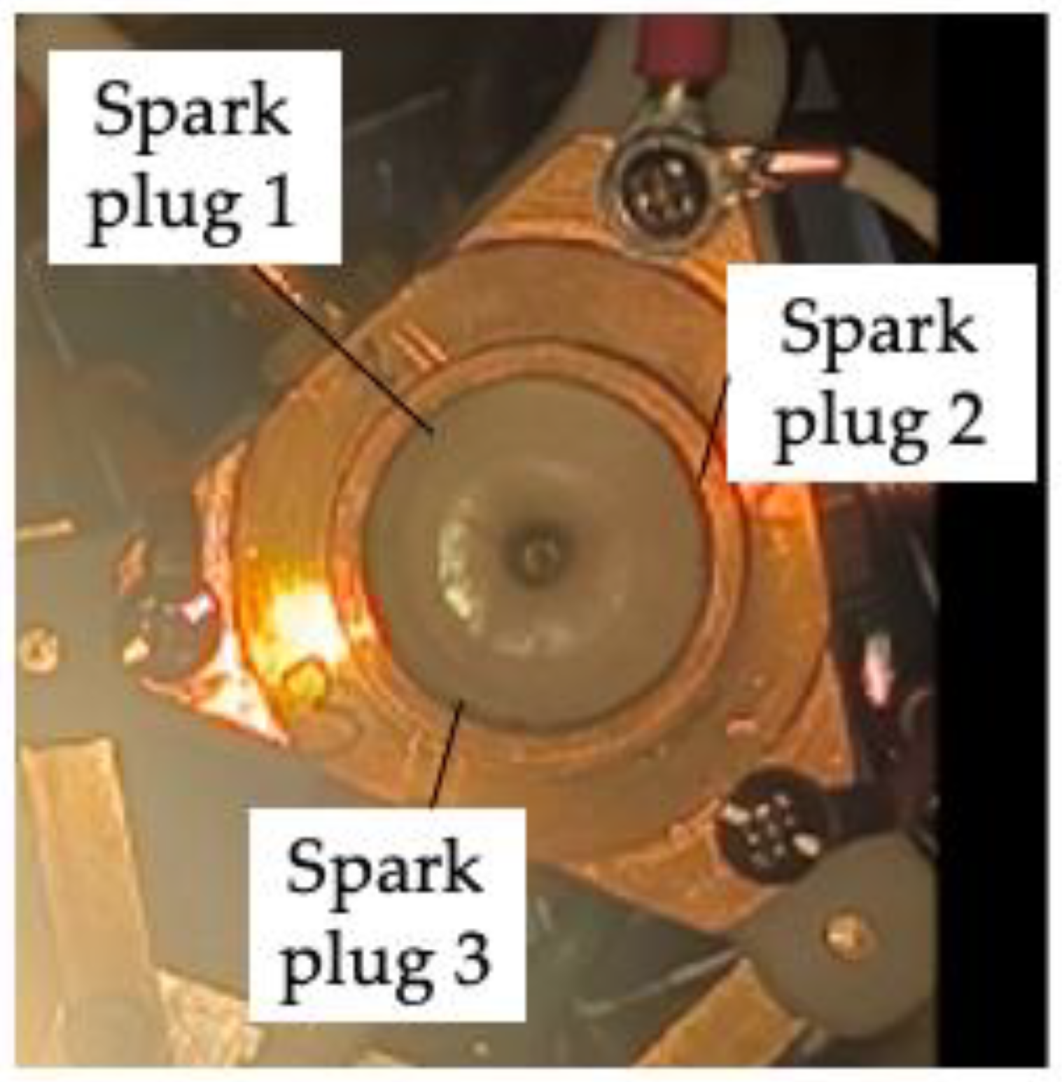
Figure 12.
Scheme of testing facility.
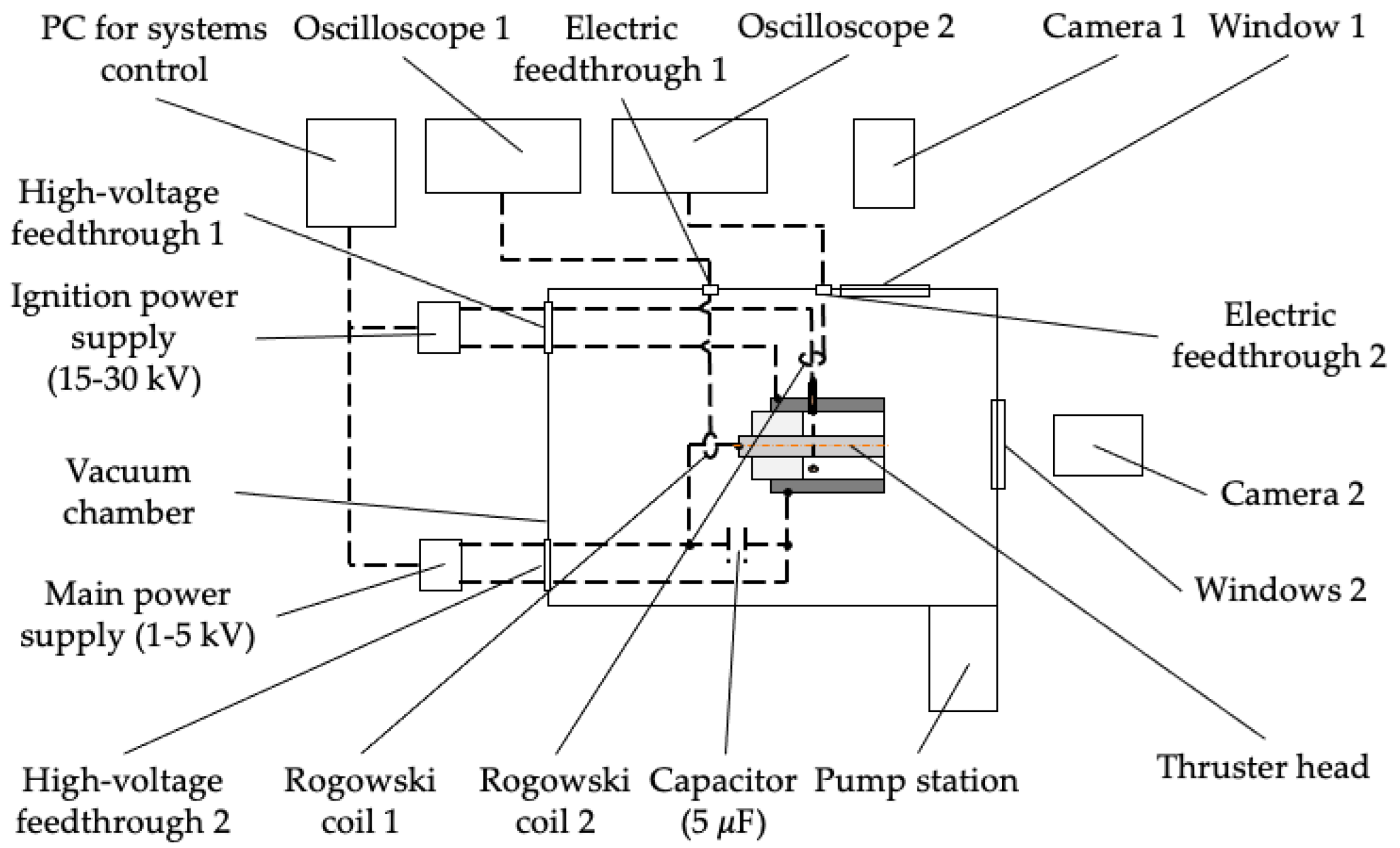
Figure 13.
Oscillograms collected by Oscilloscope 2.
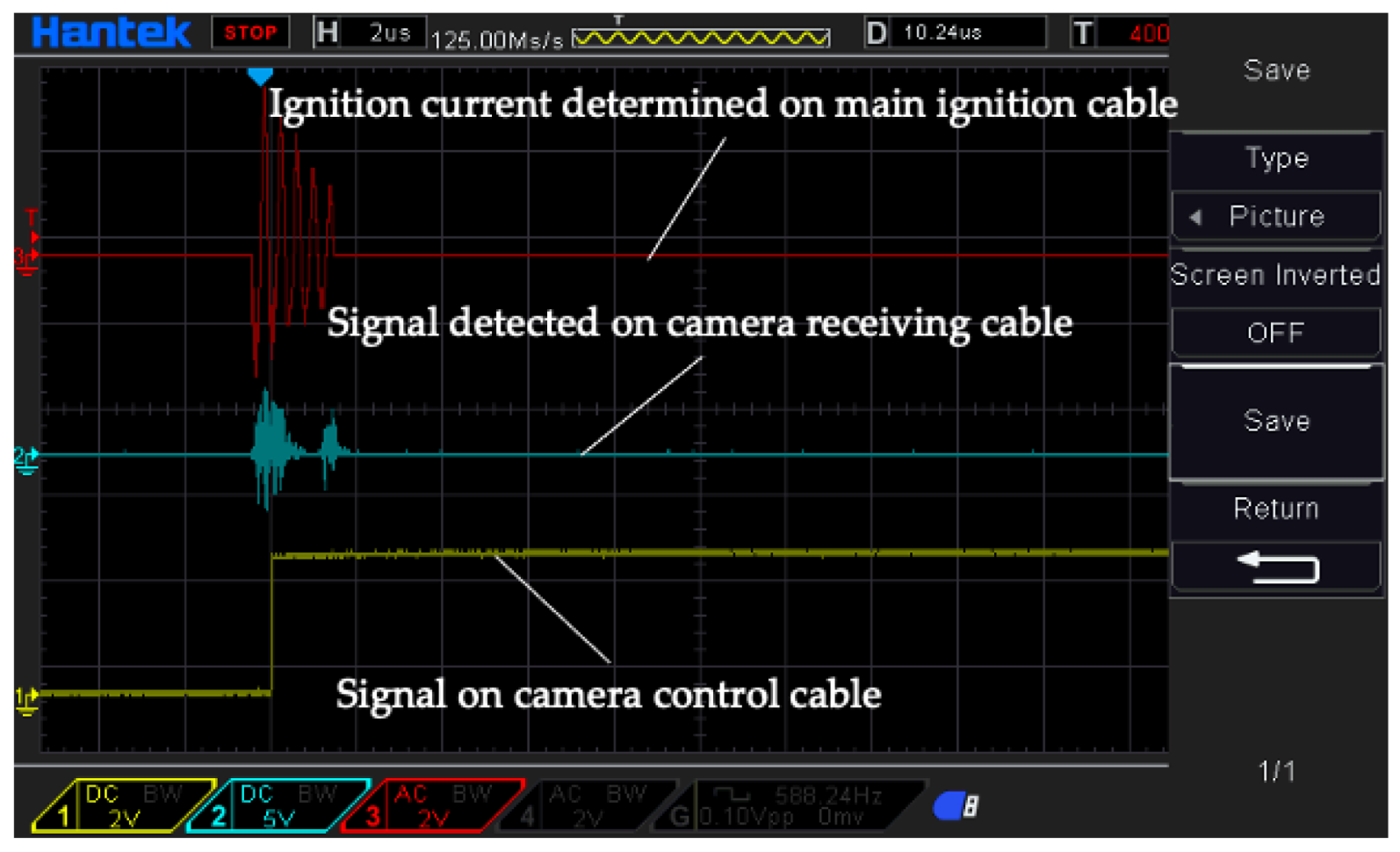
Figure 14.
Pictures of sparks generated by single plugs without voltage applied to outer and inner electrodes: (a) spark generation by first plug (SP1); (b) spark generation by second plug (SP2); (c) spark generation by third plug (SP3). In figure: SP is abbreviation of spark plug.
Figure 14.
Pictures of sparks generated by single plugs without voltage applied to outer and inner electrodes: (a) spark generation by first plug (SP1); (b) spark generation by second plug (SP2); (c) spark generation by third plug (SP3). In figure: SP is abbreviation of spark plug.
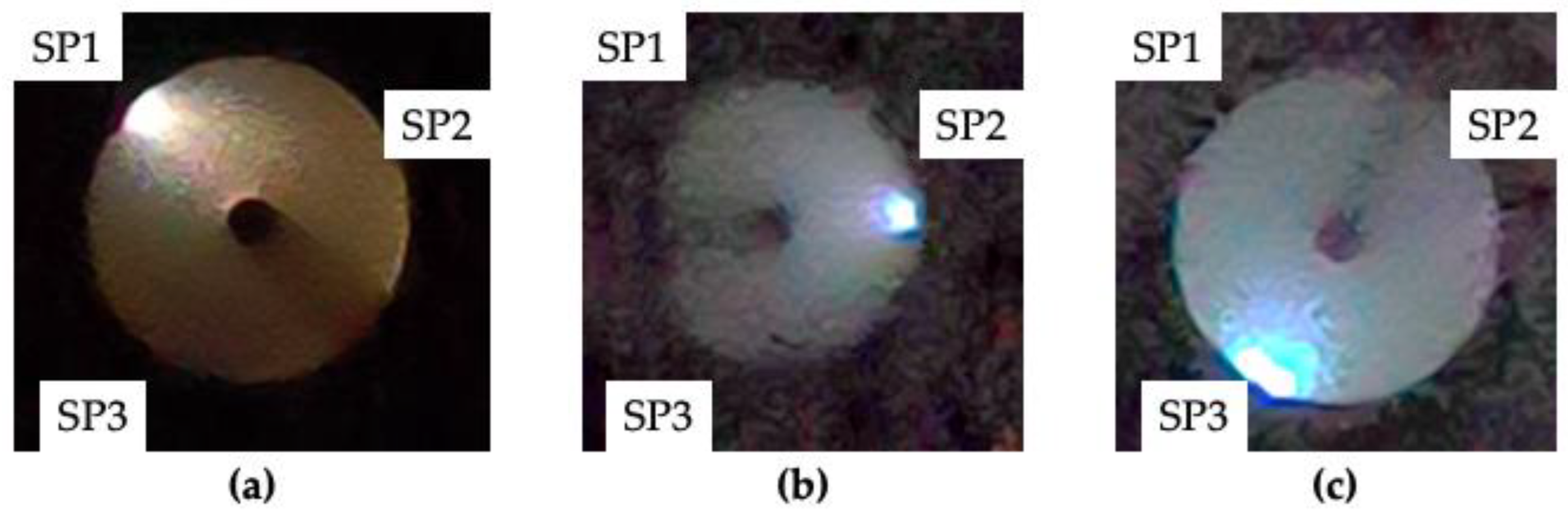
Figure 15.
Pictures of sparks generated by multiple plugs simultaneously without voltage applied to outer and inner electrodes: (a) sparks generation by first (SP1) and second (SP2) plugs; (b) sparks generation by first (SP1) and third (SP3) plugs; (c) sparks generation by second (SP2) and third (SP3) plugs; (d) sparks generation by first (SP1), second (SP2), and third (SP3) plugs. In figure: SP is abbreviation of spark plug.
Figure 15.
Pictures of sparks generated by multiple plugs simultaneously without voltage applied to outer and inner electrodes: (a) sparks generation by first (SP1) and second (SP2) plugs; (b) sparks generation by first (SP1) and third (SP3) plugs; (c) sparks generation by second (SP2) and third (SP3) plugs; (d) sparks generation by first (SP1), second (SP2), and third (SP3) plugs. In figure: SP is abbreviation of spark plug.
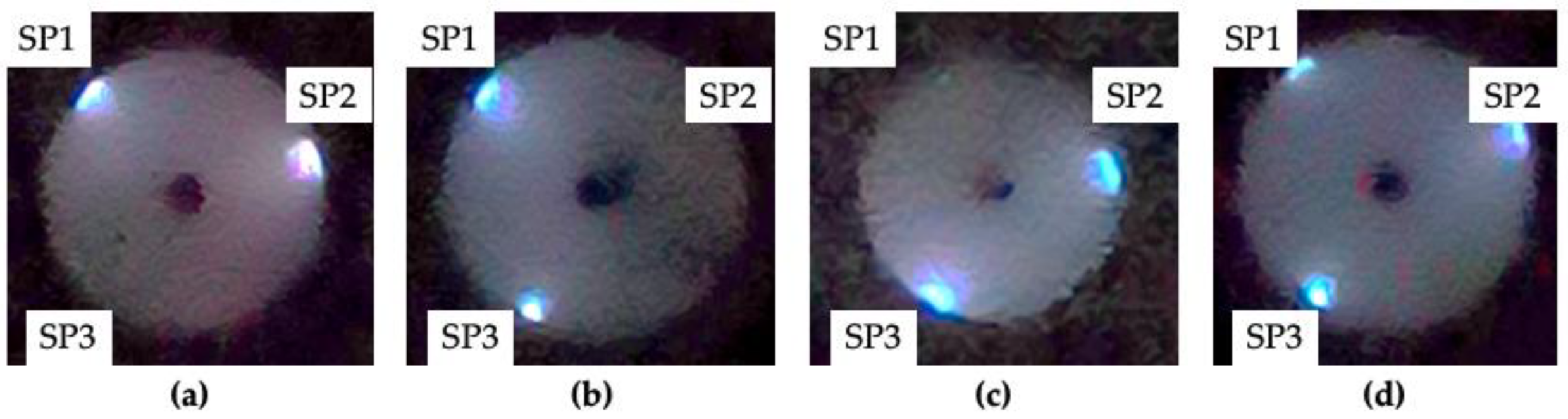
Figure 16.
Pictures of sparks generated by plugs when voltage applied to outer and inner electrodes: (a) main discharge glowing; (b) spark generation by first plug (SP1) before ignition of main discharge; (c) sparks generation by first (SP1) and second (SP2) plugs before ignition of main discharge; (d) sparks generation by first (SP1), second (SP3), and third (SP3) plugs before ignition of main discharge. In figure: SP is abbreviation of spark plug.
Figure 16.
Pictures of sparks generated by plugs when voltage applied to outer and inner electrodes: (a) main discharge glowing; (b) spark generation by first plug (SP1) before ignition of main discharge; (c) sparks generation by first (SP1) and second (SP2) plugs before ignition of main discharge; (d) sparks generation by first (SP1), second (SP3), and third (SP3) plugs before ignition of main discharge. In figure: SP is abbreviation of spark plug.
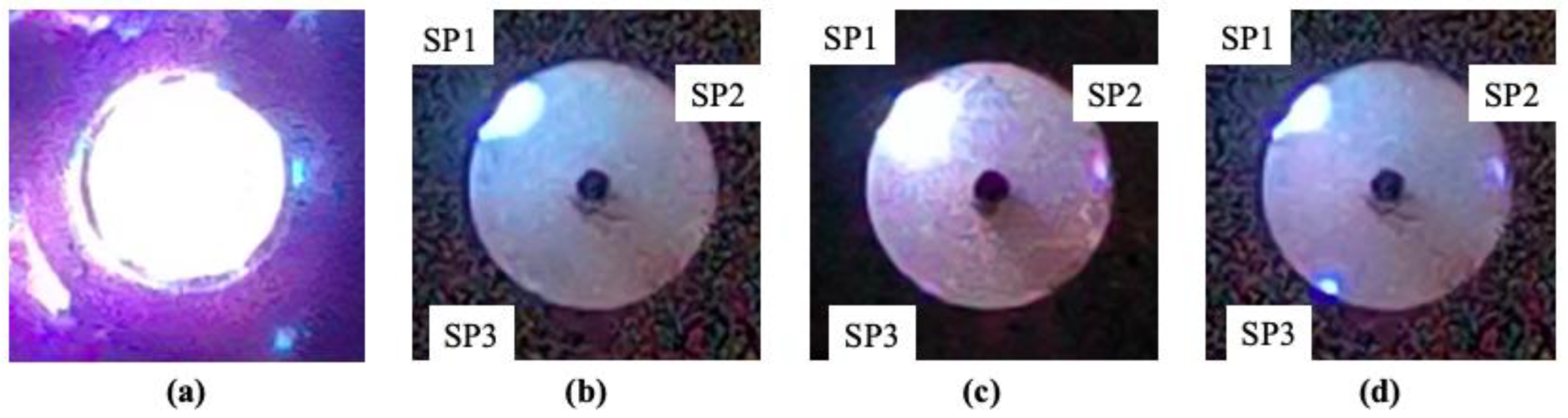
Figure 17.
Pictures of exhausted plasma flows from PPT: (a) not inclined flow when all three plugs (SP1, SP2, SP3) generate spark; (b) inclined flow when only third plug (SP3) generates spark.
Figure 17.
Pictures of exhausted plasma flows from PPT: (a) not inclined flow when all three plugs (SP1, SP2, SP3) generate spark; (b) inclined flow when only third plug (SP3) generates spark.
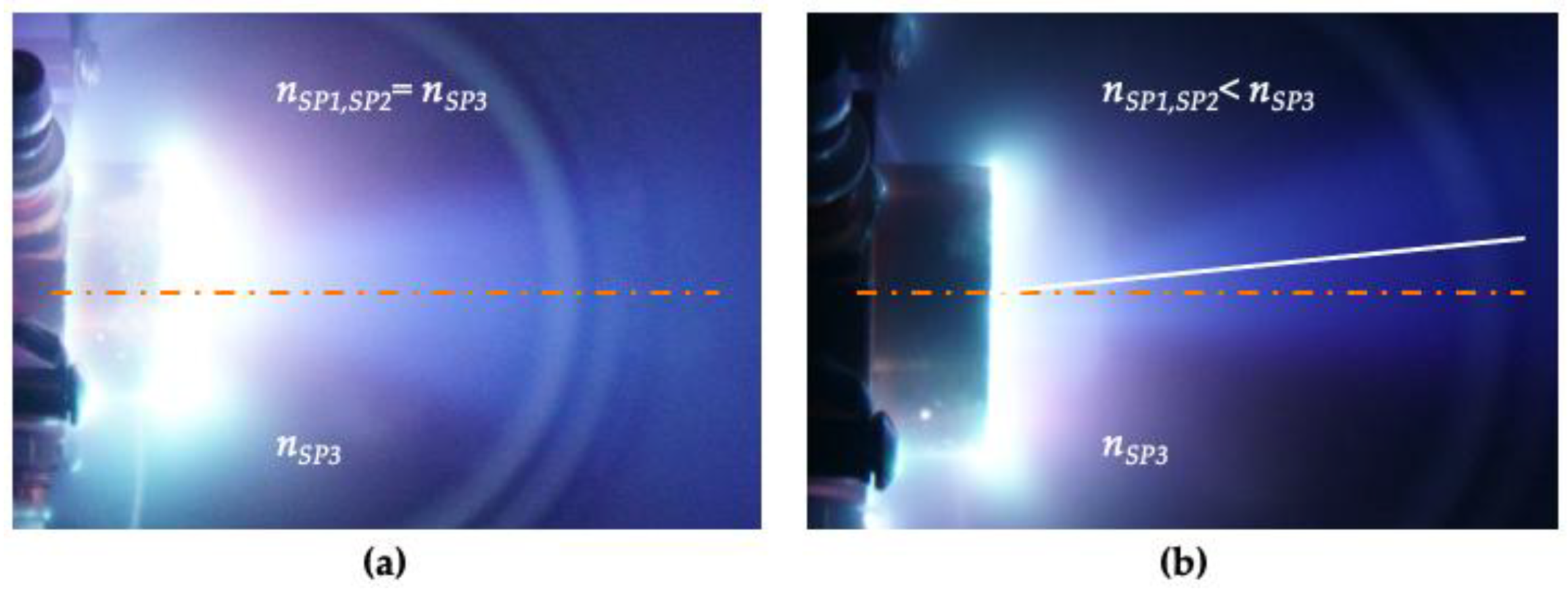
Figure 18.
Typical oscillograms of multi-spark plugs ppt ignitions (for main discharge): (a) when single plug generated spark; (b) when more than one plug generated spark.
Figure 18.
Typical oscillograms of multi-spark plugs ppt ignitions (for main discharge): (a) when single plug generated spark; (b) when more than one plug generated spark.
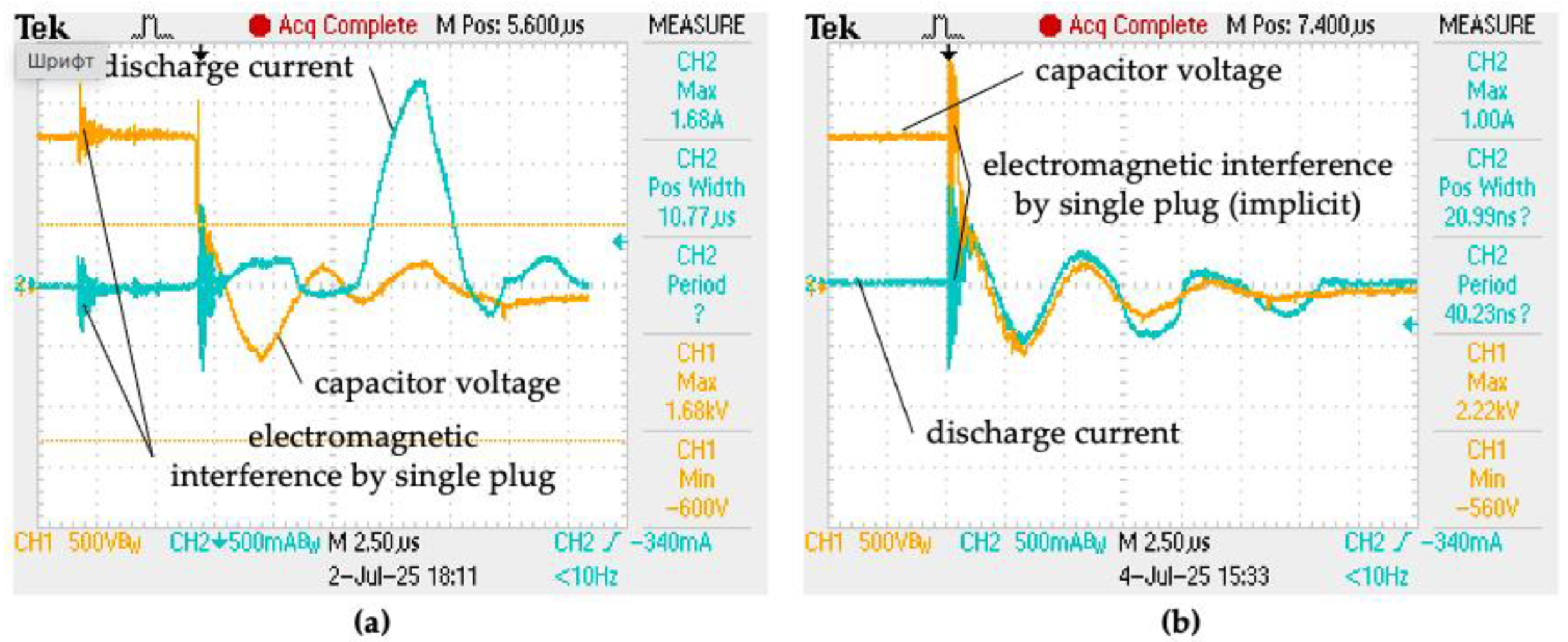
Figure 19.
Pictures of discharge channel within period of single pulse.
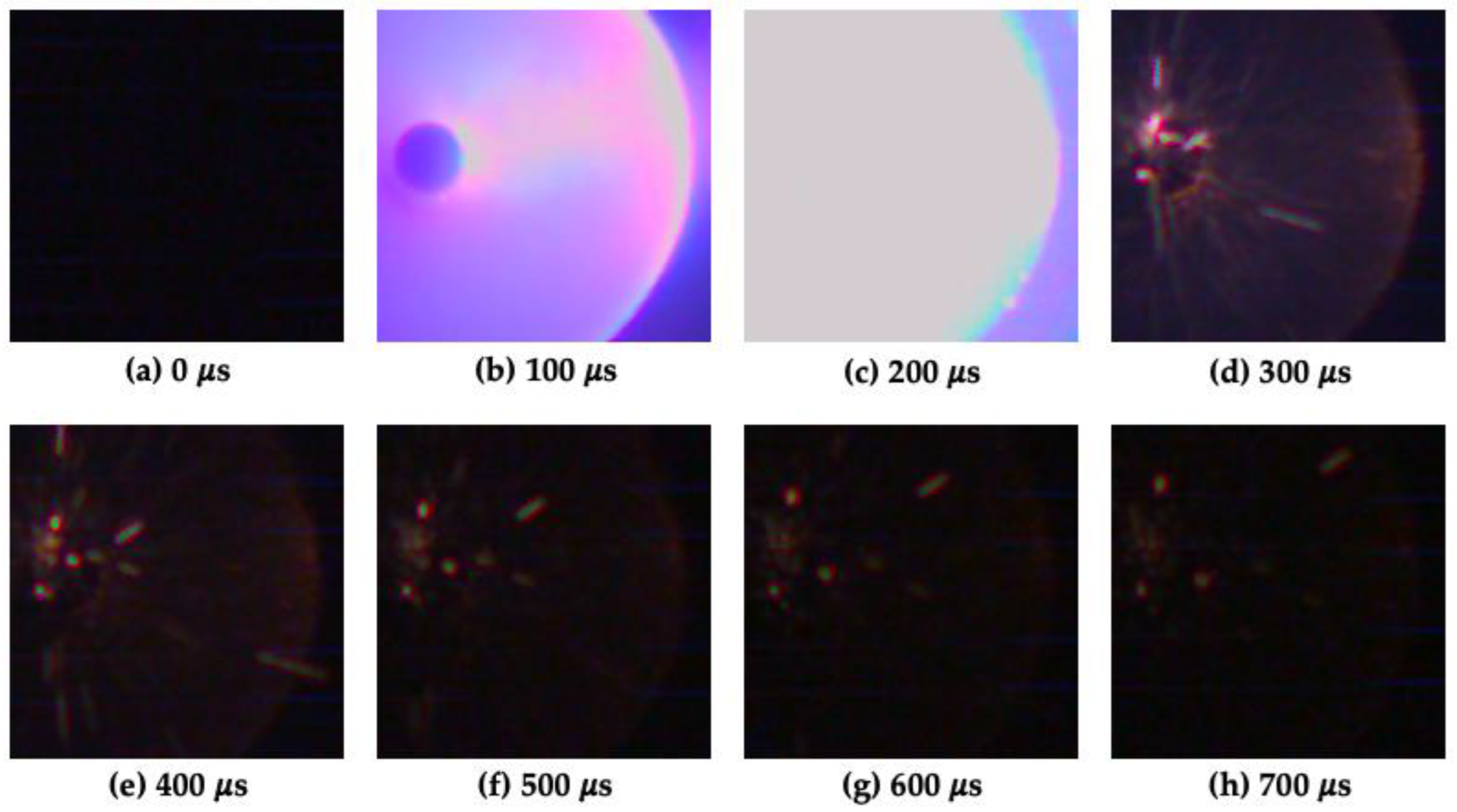
Figure 20.
Distribution of sparks ignition by different plugs: (a) without voltage applied to outer and inner electrodes; (b) when voltage applied to outer and inner electrodes.
Figure 20.
Distribution of sparks ignition by different plugs: (a) without voltage applied to outer and inner electrodes; (b) when voltage applied to outer and inner electrodes.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



