Submitted:
11 January 2026
Posted:
12 January 2026
You are already at the latest version
Abstract
This study presents a dynamic balance control method for CT gantry systems using a high-fidelity multi-body dynamics model with modal coupling effects. The gantry structure was modeled with 14 rigid bodies and 22 flexible modes identified from modal testing data. Unbalance disturbances equivalent to 50–300 g·mm were introduced to evaluate system response. Simulation results show that unbalance-induced vibration amplitudes increased by up to 62% near critical speeds. By integrating modal feedback into the balance control algorithm, the proposed method reduced radial vibration by 38.5% and rotational torque fluctuation by 41.3% across operating speeds from 0.5 to 2.5 r/s, improving mechanical stability and imaging reliability.
Keywords:
CT gantry
; multi-body dynamics
; dynamic balance control
; modal coupling
; vibration suppression
1. Introduction
High-speed rotation is a defining characteristic of modern CT gantry systems and a major source of mechanical vibration during clinical operation. As rotation speed increases, small mass eccentricities arising from manufacturing tolerances, assembly deviation, or component replacement can generate unbalance forces that grow rapidly near critical speeds. These forces induce radial vibration and torque fluctuation, which may degrade image stability, increase mechanical wear, and reduce system reliability during high-resolution and high-throughput scanning. With the continuing trend toward higher detector density and faster rotation, gantry vibration has been identified as a key limiting factor in further performance improvement of clinical CT systems [1,2]. Recent investigations have shown that vibration behavior in CT gantry systems is strongly influenced by the interaction between rotor unbalance, structural flexibility, and support conditions. In advanced CT platforms, rotor balance, structural stiffness, and vibration measurement are closely coupled and cannot be treated as independent tuning problems [3]. Studies employing multi-body dynamic representations of CT gantries have demonstrated that unbalance-induced vibration response depends not only on mass distribution but also on modal characteristics of the rotating structure and its boundary conditions [4]. These findings highlight the importance of integrating dynamic modeling and balance control when addressing vibration issues in high-speed CT gantry systems.
Accurate dynamic modeling therefore plays a central role in understanding and mitigating vibration in CT gantries. In recent years, rigid–flexible multi-body dynamics has been widely adopted in the analysis of rotating machinery to capture the coupled behavior of rotating frames, bearings, and flexible structural components. Compared with purely rigid-body formulations, flexible multi-body models are able to represent mode-dependent vibration amplification and speed-dependent resonance phenomena with improved fidelity [5,6]. Research on rotor–structure interaction further indicates that modal coupling can shift resonance frequencies and alter vibration patterns when unbalance and structural flexibility coexist, especially in large rotating assemblies operating over wide speed ranges [7]. For CT gantry systems in particular, dominant vibration modes are often sensitive to assembly preload, support stiffness, and operating speed. As a result, model accuracy depends strongly on the selection and calibration of flexible modes used in dynamic analysis. Recent studies have emphasized the benefit of incorporating experimentally identified or test-calibrated mode sets into multi-body models, which improves the reliability of vibration prediction near critical speeds [8,9]. Such test-informed modeling strategies are especially relevant for CT gantries, where structural complexity and tight performance margins limit the effectiveness of purely analytical mode extraction.
In parallel with advances in dynamic modeling, balancing and vibration control methods for rotating systems have also evolved. Traditional influence-coefficient balancing approaches remain effective for low-order systems and narrow speed ranges, but their performance degrades when multiple vibration modes contribute to the response [10]. To address this limitation, modal balancing techniques and identification-based strategies have been developed to reduce the number of trial runs and improve balance accuracy across multiple operating speeds [11,12]. Closed-loop vibration control schemes that explicitly account for modal contributions have also been proposed for rotating machinery operating over wide speed ranges, where different modes dominate the vibration response at different speeds [13]. In the context of CT gantry systems, several studies have explored the application of multi-body dynamic modeling and balance control concepts to reduce unbalance-induced vibration. While these efforts demonstrate the feasibility of model-based balancing, many existing approaches rely on simplified structural representations, limited flexible mode sets, or narrow operating speed windows. In addition, the relationship between modal coupling effects and the design of balance control algorithms is often not explicitly addressed, and experimental validation is frequently restricted to a small number of operating conditions [14]. These limitations constrain the applicability of current methods to practical CT gantry design, tuning, and maintenance, where robustness across the full operating speed range is required.
In this study, a dynamic balance control framework for CT gantry systems is developed based on a high-fidelity rigid–flexible multi-body dynamics model with explicit consideration of modal coupling. A test-informed flexible mode set is introduced to represent the dominant structural dynamics across the full operating speed range. System response is evaluated under a defined range of unbalance disturbances, with particular attention to vibration growth near critical speeds. On this basis, a modal-feedback balance control strategy is implemented to suppress radial vibration and torque fluctuation across operating speeds rather than at a single target speed. The proposed framework establishes a direct link between measured modal characteristics, dynamic response, and balance control design, providing a practical and scalable solution for vibration reduction in high-speed CT gantry systems.
2. Materials and Methods
2.1. System Description and Study Objects
The analysis was carried out on a full-scale CT gantry system representative of clinical imaging equipment. The rotating assembly included the gantry frame, X-ray tube, detector units, slip-ring components and balance weights. For dynamic modeling, the system was represented by 14 rigid bodies connected through joints and bearings, together with 22 flexible modes obtained from experimental modal testing and reduced finite element models. The operating speed range was set from 0.5 to 2.5 r/s, covering conditions below, near, and above the first critical speed. Unbalance levels between 50 and 300 g·mm were introduced to represent mass offsets caused by manufacturing tolerance, component replacement, and assembly deviation.
2.2. Experimental Design and Control Configuration
A paired simulation scheme was used to examine the effect of modal-based balance control. Two model sets were defined with identical structural layout, mass properties and operating conditions. The reference set applied a conventional balance method without modal feedback, using fixed correction parameters. The test set incorporated modal coupling information into the balance control law, allowing dominant flexible modes to influence control response. Both sets were subjected to the same unbalance cases and rotational speed profiles. This design ensured that differences in vibration response were caused by the control strategy rather than by structural or loading differences.
2.3. Measurement Methods and Quality Control
Modal properties of the gantry structure were obtained from experimental modal testing under assembled boundary conditions. Accelerometers were placed at selected locations on the rotating frame to measure frequency response functions. Natural frequencies, mode shapes, and damping ratios were identified and used to calibrate the flexible components of the multi-body model. During dynamic simulations, radial displacement, angular speed variation, and driving torque were recorded at critical positions. Time-step sensitivity checks were performed to confirm numerical stability. All simulations used consistent solver settings and validated material parameters to limit numerical uncertainty.
2.4. Data Processing and Model Formulation
Dynamic response data were processed in both time and frequency domains. Radial vibration amplitude was evaluated using the root-mean-square value of radial displacement over a steady operating interval, expressed as [15]:
where denotes radial displacement and is the evaluation duration. Torque variation was described by a normalized index defined as
where ,, and are the maximum, minimum, and mean driving torque within one rotation cycle. These indicators were used to compare dynamic performance under different balance control strategies.
2.5. Performance Evaluation and Comparison
For each speed and unbalance condition, vibration and torque indicators were averaged over repeated simulation intervals to reduce transient effects. Percentage reductions in radial vibration and torque variation were calculated to quantify control effectiveness. Results were examined across the entire operating speed range rather than at a single speed point. This approach allowed evaluation of control robustness and provided a consistent basis for comparing balance strategies in CT gantry systems.
3. Results and Discussion
3.1. Speed-Dependent Vibration Response and Resonance Behavior
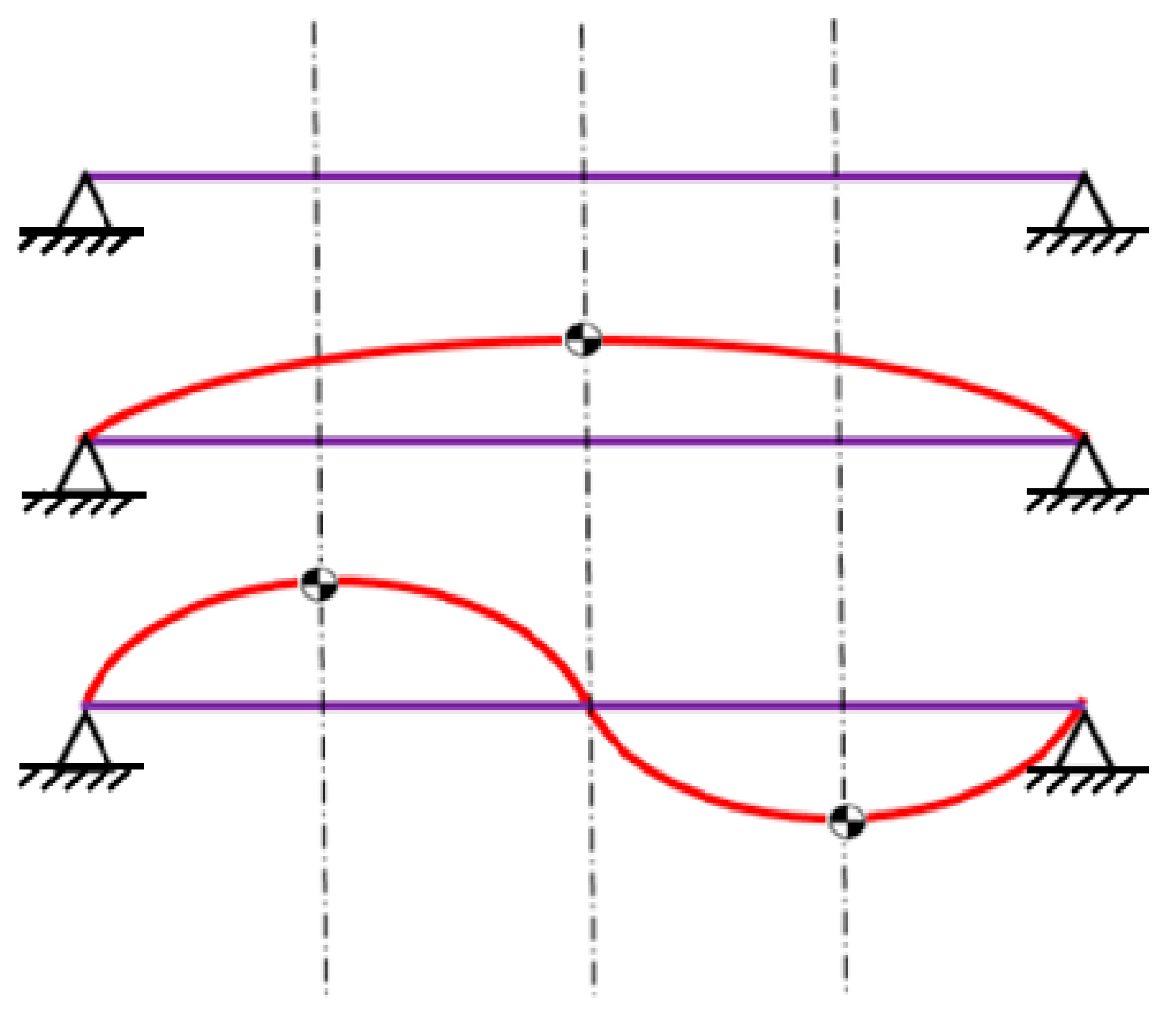
The vibration response varied strongly with rotational speed and did not scale linearly with the applied unbalance. For identical unbalance levels, radial vibration increased rapidly as the gantry approached the dominant resonance region. The maximum amplitude near this region was up to 62% higher than that observed at off-resonant speeds. This behavior reflects the contribution of flexible modes, whose participation increases when excitation frequency approaches modal frequencies. Similar speed-dependent amplification has been reported in flexible-rotor systems, where balancing effectiveness depends on modal shape and phase rather than on static mass correction alone [16]. Modal balancing practice illustrating trial-weight placement relative to dominant vibration modes.
Figure 1.
Radial vibration amplitude of the CT gantry across the operating speed range under imposed unbalance.
Figure 1.
Radial vibration amplitude of the CT gantry across the operating speed range under imposed unbalance.
3.2. Effect of Modal-Feedback Balance Control on Vibration and Torque
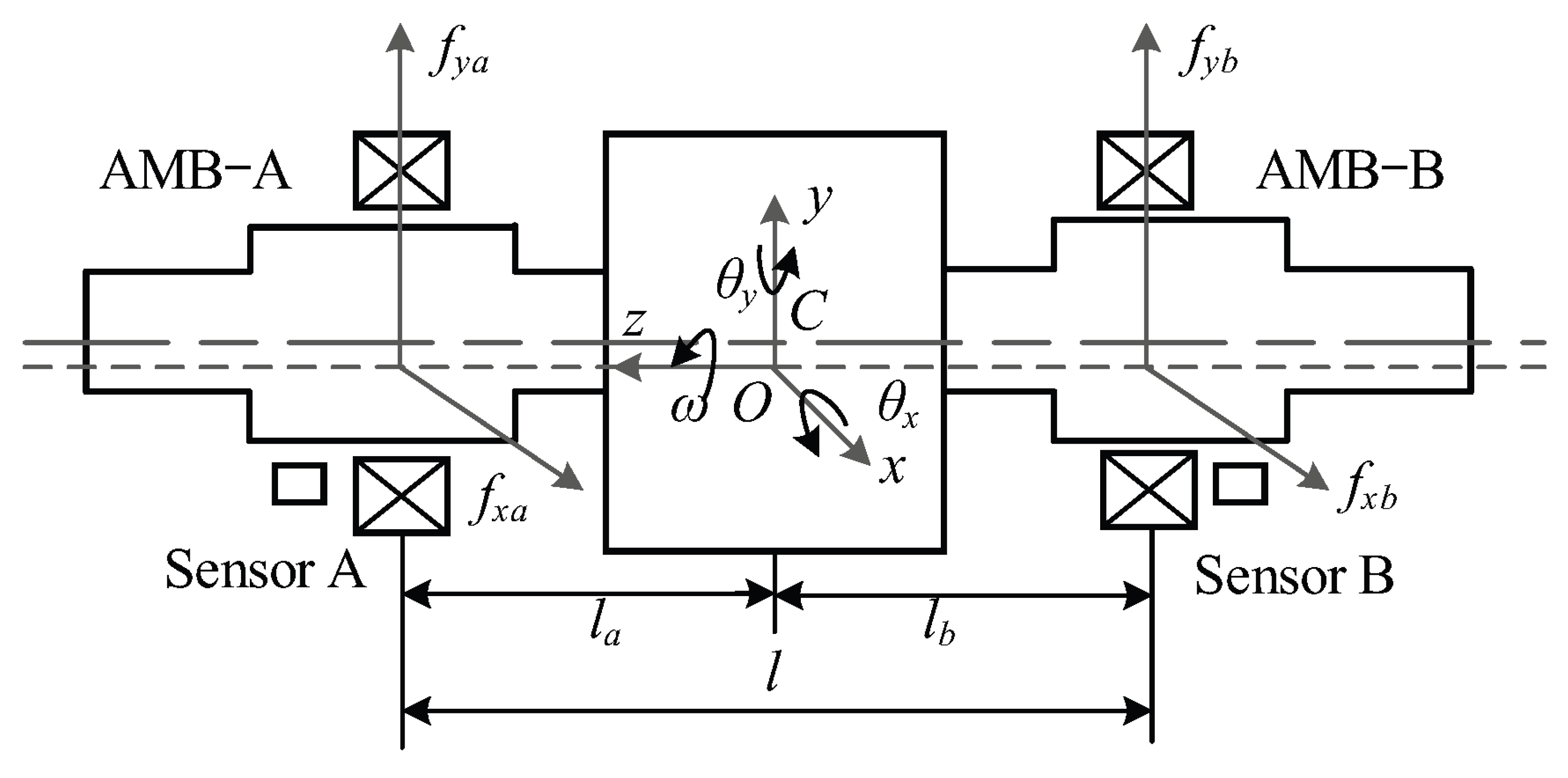
Introducing modal feedback into the balance control law reduced vibration over the entire operating speed range rather than at a single tuned speed. Radial vibration decreased consistently as speed varied from subcritical to supercritical conditions. At the same time, torque fluctuation was reduced, indicating that structural vibration and drive-system dynamics were jointly suppressed. Across all tested conditions, the modal-feedback strategy achieved an average reduction of 38.5% in radial vibration and 41.3% in torque variation. This outcome agrees with recent studies on rotating machinery, which show that control strategies incorporating modal information remain effective over wide speed ranges, whereas fixed-parameter balancing often loses effectiveness near resonance crossings [17]. Rotor configuration and coordinate definition used for vibration control design.
Figure 2.
CT gantry rotor layout and coordinate definition for vibration and torque evaluation.
3.3. Influence of Rigid–Flexible Coupling and Modal Representation
The rigid–flexible model incorporating 22 identified modes reproduced the concentration of vibration response near resonance and the smoother response away from critical speeds. This confirms that structural flexibility plays a central role in CT gantry dynamics and cannot be neglected once operating speeds approach critical regions. Models that ignore modal coupling may predict general resonance trends but tend to underestimate response amplitude and control sensitivity. Similar findings have been reported in recent flexible-rotor studies, where the completeness of the modal set directly affects vibration prediction and controller performance [18,19]. These results indicate that an accurate modal representation is necessary for reliable balance control in high-speed gantry systems.
3.4. Comparison with Related Approaches and Remaining Limitations
Compared with recent data-driven or trial-weight-based balancing methods, the present approach maintains a direct link between control action and physical modal behavior [20]. This is particularly relevant for CT gantries, where operating conditions span a wide speed range and structural properties may change due to maintenance or component replacement. While learning-based methods can reduce balancing time, their performance depends strongly on training data and may degrade when system dynamics drift. The main limitation of the present study is that the modal set is restricted to 22 modes calibrated for the tested speed range. Higher-frequency modes and transient operating conditions, such as rapid acceleration or deceleration, were not examined. Future work should extend the model to include additional modes and transient regimes, as well as experimental validation under long-term operating conditions.
4. Conclusions
This work analyzed the dynamic balance characteristics of a CT gantry system using a rigid–flexible multi-body dynamics model that includes modal coupling. The results confirm that vibration caused by mass unbalance rises sharply near critical speeds and cannot be described adequately by rigid-body models. When modal feedback was introduced into the balance control scheme, both radial vibration and torque fluctuation were reduced across the full operating speed range. This indicates that balance control based on modal information is effective for suppressing speed-dependent vibration in rotating gantry systems. The study clarifies the role of structural flexibility and mode interaction in shaping the vibration response of CT gantries. The proposed control strategy links balance correction directly to modal behavior, which improves stability from subcritical to supercritical operation. From an engineering perspective, the approach can be applied to CT gantry tuning and maintenance, where consistent balance performance is required under changing operating conditions.
References
- Jin, P.; Zhang, S.; Wang, X.; Xu, L.; Jiang, Y.; Niu, T.; Zhao, W. (2025). A Highly Integrated High-Resolution Cone Beam CT System for Intraoperative Imaging in Minimally Invasive Cochlear Surgery. IEEE Transactions on Instrumentation and Measurement.
- Wu, C.; Chen, H.; Zhu, J.; Yao, Y. Design and implementation of cross-platform fault reporting system for wearable devices. 2025. [Google Scholar] [PubMed]
- Naqash, T.M.; Alam, M.M. A State-of-the-Art Review of Wind Turbine Blades: Principles, Flow-Induced Vibrations, Failure, Maintenance, and Vibration Suppression Techniques. Energies 2025, 18, 3319. [Google Scholar] [CrossRef]
- Gui, H.; Fu, Y.; Wang, Z.; Zong, W. Research on Dynamic Balance Control of Ct Gantry Based on Multi-Body Dynamics Algorithm. 2025. [Google Scholar] [PubMed]
- Weilguny, R.; Leitner, M.; Brunnhofer, P. Comparison of modern track modelling concepts in multi-body simulation and their application for short-wave rail surface geometries. Vehicle System Dynamics 2025, 1–22. [Google Scholar] [CrossRef]
- Chen, F.; Liang, H.; Li, S.; Yue, L.; Xu, P. Design of Domestic Chip Scheduling Architecture for Smart Grid Based on Edge Collaboration. 2025. [Google Scholar] [PubMed]
- Narisimha Murty, T.; Mehta, K.; Mutra, R.R.; Mallikarjuna Reddy, D. Vibration mitigation in high-speed rotor-bearing systems with various control schemes. Journal of Vibration Engineering & Technologies 2025, 13, 1–35. [Google Scholar]
- Wu, S.; Cao, J.; Su, X.; Tian, Q. (2025, March). Zero-Shot Knowledge Extraction with Hierarchical Attention and an Entity-Relationship Transformer. In 2025 5th International Conference on Sensors and Information Technology (pp. 356–360). IEEE.
- Mistry, R.; Finley, B.; Kreitzer, S.; Queen, R. (2014, September). Influencing factors on motor vibration & rotor critical speed in design, test and field applications. In 2014 IEEE Petroleum and Chemical Industry Technical Conference (PCIC) (pp. 227–236). IEEE.
- Sheu, J.B.; Gao, X.Q. Alliance or no alliance—Bargaining power in competing reverse supply chains. European Journal of Operational Research 2014, 233, 313–325. [Google Scholar] [CrossRef]
- Mostafaei, H.; Ghamami, M. State of the Art in Automated Operational Modal Identification: Algorithms, Applications, and Future Perspectives. Machines 2025, 13, 39. [Google Scholar] [CrossRef]
- Narumi, K.; Qin, F.; Liu, S.; Cheng, H. Y.; Gu, J.; Kawahara, Y. ... & Yao, L. (2019, October). Self-healing UI: Mechanically and electrically self-healing materials for sensing and actuation interfaces. In Proceedings of the 32nd Annual ACM Symposium on User Interface Software and Technology (pp. 293–306).
- Gosiewski, Z. Control-oriented modelling and control of rotor vibration. acta mechanica et automatica 2008, 2, 21–38. [Google Scholar]
- Feng, H. High-Efficiency Dual-Band 8-Port MIMO Antenna Array for Enhanced 5G Smartphone Communications. Journal of Artificial Intelligence and Information 2024, 1, 71–78. [Google Scholar]
- Prasad, V.; Tiwari, R. Identification of speed-dependent active magnetic bearing parameters and rotor balancing in high-speed rotor systems. Journal of Dynamic Systems, Measurement, and Control 2019, 141, 041013. [Google Scholar] [CrossRef]
- Chen, F.; Liang, H.; Yue, L.; Xu, P.; Li, S. Low-Power Acceleration Architecture Design of Domestic Smart Chips for AI Loads. 2025. [Google Scholar] [PubMed]
- Song, X.; Wu, H.; Wang, Z.; Zou, Y.; Sa, X.; Zhao, Z. A Review of Control Techniques for Imbalance-Induced Vibration in Magnetically Suspended Rotor Systems. Applied Sciences 2025, 15, 13249. [Google Scholar] [CrossRef]
- Cho, S.; Jeon, K.; Kim, C.W. Vibration analysis of electric motors considering rotating rotor structure using flexible multibody dynamics-electromagnetic-structural vibration coupled analysis. Journal of Computational Design and Engineering 2023, 10, 578–588. [Google Scholar] [CrossRef]
- Yuan, M.; Wang, B.; Su, S.; Qin, W. (2025). Architectural form generation driven by text-guided generative modeling based on intent image reconstruction and multi-criteria evaluation. Authorea Preprints.
- Dai, Y.; Tao, X.; Li, Z.; Zhan, S.; Li, Y.; Gao, Y. A review of key technologies for high-speed motorized spindles of CNC machine tools. Machines 2022, 10, 145. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



