
Submitted:
30 December 2025
Posted:
31 December 2025
You are already at the latest version
Abstract
This study presents two-dimensional numerical simulations of acoustic wave scattering involving a simplified human body model placed inside an enclosed cabin. The simulations utilise the µ-diff backscattering algorithm in MATLAB, which is suitable for model-ling frequency-domain interactions with multiple scatterers under penetrable boundary conditions. The body is represented as a cluster of penetrable, tangent circular cylinders with acoustic properties mimicking muscle, fat, bone, and clothing layers. Hidden PVC cylinders are embedded to simulate concealed objects. Several configurations were examined, varying the number of PVC inclusions (two to four), the frequency range, and the presence of an absorbing cabin wall. Sound pressure level (SPL) distributions around the body and at a 1-meter distance were analysed. Polar plots reveal distinct differences between the baseline body model and those incorporating PVC inclusions. The most pronounced effects occur near 160 Hz when an absorbing wall is present within the acoustic enclosure. The presence of an absorbing wall modifies wave behaviour, producing enhanced directional attenuation. The results demonstrate how object composition, spatial arrangement, and enclosure geometry influence acoustic backscattered fields. These findings highlight the potential of wave-based numerical modelling for detecting concealed items on the human body in confined acoustic environments, supporting the development of non-invasive security screening technologies. This work presents the first study addressing the 2D simulation of multiple acoustic waves scattering by a human body model within an acoustically enclosed environment for detecting hidden items on the human body.
Keywords:
2D acoustic wave scattering
; µ-diff backscattering algorithm
; penetrable scatterers
; human body model
; hidden object detection
; sound pressure level (SPL)
; acoustic cabin
; MATLAB simulations
; bioacoustics
1. Introduction
The detection of concealed objects on the human body through non-invasive methods to prevent the need for physical pat-downs is increasingly important in public safety and security screening systems. Their main goal is to enhance threat identification while preserving comfort and privacy. Among various wave-based modalities, acoustic methods offer advantages due to their ability to penetrate textile and soft-tissue layers, providing localized scattering signatures that may indicate the presence of foreign objects. However, challenges arise due to the complexity of wave interactions with anatomical heterogeneities, clothing layers, and environmental boundaries.
In recent years, various models and numerical strategies have been developed to simulate wave scattering phenomena involving penetrable or non-penetrable scatterers [1,2,3]. In particular, multiple scattering problems have found applications across acoustics [2], biomedical imaging, and non-destructive testing in various layered media [3]. Several methods have been employed in the literature for modelling the scattering behaviour of cylindrical and arbitrarily shaped inclusions. For example, the distorted Born approximation has been applied to acoustic inverse problems [4,5]. At the same time, high-order boundary integral techniques have been used to solve Helmholtz-type formulations in media containing clusters of scatterers [6,7]. Other contributions highlight the effectiveness of Krylov subspace solvers and Fourier-based truncation schemes in accelerating convergence and managing computational complexity [8,9,10]. Previous research has explored 2D and 3D models for acoustic scattering using numerical solvers and inverse problem formulations. Bibicu et al. [11] conducted extensive simulations on the low-frequency acoustic detection of hidden objects using a simplified human body model, analysing the effects of various boundary conditions, including rigid and absorbing enclosures. Their findings demonstrated the sensitivity of the backscattered field to material composition and wave frequency, highlighting the potential of passive or active acoustic detection in confined environments.
In this study, we extend such investigations by modelling a human body composed of penetrable cylindrical acoustic scatterers representing bones, muscle, fat, and textile layers. Concealed inclusions are embedded within the model to mimic non-biological items (e.g., steel, salt, PVC), and simulations are conducted across a wide frequency range (20 Hz–1000 Hz). The simulations are performed using the µ-diff MATLAB toolbox [12], which offers a fast and accurate solver for multiple scattering problems through boundary integral equations and spectral Fourier-based discretization. The main goal of this work is not to propose a new boundary integral formulation but to demonstrate the effectiveness of the proposed method when applied to a common and widely used boundary integral equation formulation. The single- and double-layer operators were selected due to their simplicity and computational efficiency. The numerical framework enables efficient modeling of both wave propagation and wave-object interactions in complex geometries, including confined domains with reflecting or absorbing walls. The numerical experiments and applications presented in the manuscript are deliberately restricted to frequency ranges that avoid the problematic interior resonance frequencies. Within this regime, both the single- and double-layer formulations are well-posed and yield unique, stable solutions, as confirmed by our numerical observations. Consequently, the reported results are not affected by the non-uniqueness issues associated with resonant frequencies. We are aware that our approach can be directly applied to well-posed alternatives, such as combined-field integral equations. However, the choice of boundary integral operators in our work was also influenced by experimental considerations. The system is expected to provide a decision within a short timeframe. The choice of a low-frequency regime, where the wavelength is large compared to the characteristic size of the investigated features, is motivated by several considerations. First, low frequencies reduce sensitivity noise, which enhances the robustness of the detection procedure. Second, from a numerical standpoint, the low-frequency regime avoids dispersion and pollution effects that typically affect high-frequency simulations, ensuring stable and reliable solutions within the adopted computational framework. The detection mechanism relies on the contrast between the material properties of the target and the surrounding medium, i.e., an impedance mismatch. At low frequencies, the scattered response is primarily governed by this contrast rather than by resonant or geometric effects. As a result, the presence of the target can be inferred from measurable variations in the field induced by the impedance mismatch, which makes the detection strategy robust and less sensitive to modeling uncertainties.
While previous work [11] examined the human body in enclosures, this study is the first to introduce penetrable tissue models combined with concealed high-contrast inclusions in an absorbing cabin environment. By analysing the spatial patterns and amplitude modulations in the acoustic field, this study contributes to the development of non-invasive detection systems for use in enclosed spaces such as airport checkpoints, transport cabins, or industrial environments.
2. Related Works
Literature analysis revealed a limited number of research papers focused on the proposed theme. Many papers addressed either multi-scatterer 2D algorithms, human tissue modelling in 3D, or room/enclosure acoustics. However, few combined a two-dimensional multi-scatterer formulation of a dummy human-shaped model within a bounded enclosure with carefully modelled boundary conditions across a low frequency range. The Boundary Element Method (BEM) is a classic, widely used approach for exterior acoustic scattering, as it reduces problem dimensionality and naturally enforces radiation conditions [13,14]. BEM is a good baseline for 2D Helmholtz formulation and for references on singular integrals, quadrature, and inverse problems. Hybrid BEM–FEM (Finite Element Method) and improved FEM/BEM coupling methods have been developed to address interior–exterior coupling and complex material behaviour like elastic shells and solid–fluid interactions. Recent surveys and numerical studies reveal trade-offs between domain and boundary methods for coupled problems [15,16]. Multi-scatterer problems (e.g., many obstacles or inclusions) are often handled via multiple-scattering series, T-matrix methods, or boundary-integral formulations accelerated with the Fast Multipole Method (FMM). Fast high-order and FMM-accelerated boundary element method implementations for 2D and 3D scattering are well-established and essential for simulating numerous scatterers or at high frequencies [17]. These methods are considered relevant if the human body is approximated by numerous sub-elements like limbs, a torso, and clothing, or if multiple reflecting objects are present within the enclosure. Several recent studies model 3D wave propagation and scattering within human tissues for medical imaging and tomography. These models predominantly utilise high-frequency domains. These works cover frequency-dependent material properties, attenuation, and complex internal scattering. While primarily 3D, these works offer essential material models and validation approaches for adapting to a 2D idealised human model [18,19]. There is an emerging 2D simulation study specifically investigating active detection of hidden items based on scattering from dummy human bodies at low frequencies [11]. This study examined the role of boundary conditions and enclosure effects on the human-scattering problem. Previous 2D detection studies prioritise sensitivity to boundary conditions. They explicitly model the impedance and modal structure of the enclosure and quantify their impact on scattering signatures [20]. The authors [21] have significantly contributed to the development of fast BEM techniques based on H-matrices, which provide competitive alternatives to the Fast Multipole Method.
3. Materials and Methods
Mathematical Model of the Scattering Problem
To simulate the interaction between time-harmonic acoustic waves and penetrable objects placed on or near the human body, we employed the open-source MATLAB toolbox µ-diff [12,22,23,24]. The µ-diff algorithm is based on boundary integral equations (BIE) combined with spectrally accurate Fourier-based discretization for cylindrical geometries. The simulations aim to reproduce realistic security-screening conditions, accounting for the presence of high-contrast inclusions (e.g., metallic items or illicit substances) that may be concealed on the body surface or underneath garments.
Let denote the union of M disjoint circular disks with center and radii . An incident wave, , is assumed to be a plane wave:
where is the unit vector that indicates the direction of propagation, and k is the wavenumber. The acoustic wavefield is governed by the following transmission problem, which is reformulated using boundary integral equations suitable for spectral discretization:
The last equation in system (2) represents the Sommerfeld radiation condition at infinity, which ensures the uniqueness and physical relevance of the scattered field in the unbounded domain.
The exterior field and interior field are represented as single-layer potentials:
where are densities, are Green functions of Helmholtz equation in exterior/interior domain, and Γ is the boundary of the collection of scatterers. Green functions are defined as follows:
Imposing the continuity of the total field and the normal component of the flux across each interface leads to the following system of integral equations on Γ:
where denotes the normal derivative of the single-layer operator:
The total acoustic field in the exterior is then reconstructed as the sum of the incident wave and the scattered field :
The boundary integral equations are discretized using a truncated Fourier series representation of the surface densities ρ±, exploiting the circular geometry of the inclusions. This spectral approach, implemented in the µ-diff toolbox, ensures high numerical accuracy and computational efficiency, particularly for problems involving large numbers of cylindrical scatterers.
Acoustic Scene Geometry
The geometrical configuration of the simplified human model and the positioning of hidden items are displayed in Figure 1, which also includes the variation between reflective and absorbing boundary conditions. The acoustic cabin is modelled as a rectangular enclosure with dimensions 6 meters (length) × 2.5 meters (width). The walls of the cabin are treated as either rigid (reflective) or partially absorbing, depending on the simulation scenario, allowing analysis of boundary effects on wave propagation and scattering behaviour. The absorbing walls are modelled using 900 cylindrical elements, each with a radius of 0.1 cm, to represent the acoustic properties of commercial polyester (SD) foam. These cylinders are arranged to simulate a porous, sound-absorbing surface, enabling analysis of wave attenuation and scattering pattern alterations within the enclosure.
The dummy human body model, constructed from a set of acoustic cylinders, represents major anatomical components using simplified geometries and material approximations. The configuration includes:
- -
- One central cylinder with radius r0 = 10 cm, simulating the head (modelled as bone);
- -
- One cylinder with radius r1 = 5 cm, representing the neck (modelled as fat);
- -
- Fourteen cylinders (2 × 7) with radius r1 = 5 cm, simulating the arms (modelled as muscle);
- -
- Twenty-four cylinders (2 × 12) with radius r2 = 2.5 cm, representing body fat, and seventy-two cylinders (6 × 12) with the same radius, representing body muscle;
- -
- Fourteen cylinders (2 × 7) with radius r1 = 5 cm, modelling the legs (muscle).
Each cylindrical element is assigned acoustic properties corresponding to its biological tissue type (fat, muscle, or bone). This simplifies the model while still providing a functional representation for acoustic wave scattering analysis.
A total of 550 cylinders, each with a radius of 0.1 cm, are used to simulate the effect of flax fabric, representing the clothing layer on the body model. These cylinders are distributed over the surface of the simplified human body model to approximate the acoustic impact of woven textile material. The centre-to-centre spacing of the clothing cylinders is 0.1 cm because they are tangent to each other reciprocally. The collective response of these closely spaced cylinders reproduces the macroscopic acoustic behavior of a thin, porous fabric layer, with scattering primarily governed by the overall impedance contrast and thickness, rather than by fine microstructural details.
Fluid-equivalent models are commonly used in low-frequency ultrasound and acoustic scattering studies where the goal is detection rather than detailed characterisation of internal elastic wave phenomena. The biological tissues (bone, muscle, fat) and the investigated objects (e.g., PVC) are modeled as penetrable acoustic scatterers represented by fluid equivalents, and support only compressional (longitudinal) waves. This approximation is justified by the low-frequency range considered in this study. At frequencies between 20 and 1000 Hz, the corresponding wavelengths in soft tissues and in typical solids of interest are significantly larger than the characteristic dimensions of the modeled structures. In this regime, shear wave effects are negligible in the scattered acoustic field, and the interface response is dominated by impedance contrast. At low frequencies, the scattering behaviour is mainly governed by the density and bulk modulus differences between the scatterer and the surrounding medium. By modelling the materials as fluids, this dominant impedance mismatch is captured, which is the crucial physical mechanism behind the detection strategy
To simulate hidden objects, 2, 3, or 4 cylindrical inclusions with a radius of r3 = 2.5 cm are embedded within the body model. These cylinders are assigned the acoustic properties of PVC, representing concealed non-biological items such as plastic contraband or foreign objects.
The simulations were performed at a range of discrete frequencies: 20, 50, 125, 160, 300, 500, and 1000 Hz. These frequencies were selected to cover low to mid-range acoustic bands, allowing analysis of frequency-dependent scattering behaviour and the sensitivity of detection to object size, material contrast, and environmental absorption.
4. Results
The simulation results primarily analyse the sound pressure level (SPL) distribution surrounding the human body model and its variation at a 1-meter distance due to the presence of concealed objects. Polar plots of the scattered field reveal differences between the baseline body model and configurations containing embedded PVC inclusions, with pronounced effects observed at frequencies around 160 Hz.
Table 1 presents typical acoustic (longitudinal) sound speeds, c, and mass densities, ρ, for the materials used in simulations. For the frequency range 20–1000 Hz, these properties are frequency-independent for homogeneous materials. Table 2 presents the technical indicators of the commercial polyester (SD) foams employed in the simulations.
Figure 2 and Figure 3 illustrate the computed acoustic field distributions for the simplified human body model subjected to an incident plane wave at a frequency of 160 Hz. The visualizations include the real part, imaginary part, and absolute magnitude of the total acoustic field, with and without the presence of hidden objects. The color maps show the complex total field , defined in Eq. (7), at frequency 160 Hz. Since the incident plane wave is defined with unit amplitude, the field values are reported in normalized units.
In Figure 2, the simulation is performed without any enclosure wall. The top row shows the case where the body is dressed with a clothing layer (modelled using flax material). The bottom row adds two embedded PVC cylinders to simulate hidden items. The comparison reveals clear scattering and interference effects due to the presence of foreign inclusions, especially visible in the changes of field amplitude and phase around the embedded objects.
Figure 3 presents the same configuration but with an absorbing wall placed at the right-hand side of the scene. The absorbing wall is modelled using a dense distribution of polyester-based cylindrical elements, mimicking acoustic treatment panels. Compared to the free-field case, the presence of the absorbing wall reduces field reflections, which significantly alters the global field pattern. While hidden items still generate localized scattering, the overall amplitude of reflected waves is lower due to boundary absorption, which may improve detection clarity in specific scenarios.
Data in Figure 4 presents the sound pressure level (SPL) distribution for the simplified human body model, representing a person with a height of 1.60 meters. The acoustic enclosure features rigid, fully reflective walls with no absorption. Simulations were performed at discrete frequencies of 20, 50, 125, 160, 300, 500, and 1000 Hz to evaluate frequency-dependent scattering effects. At 160 Hz, the SPL distribution exhibits only a marginal variation, making it challenging to distinctly identify the presence of concealed objects.
Data in Figure 5 presents the sound pressure level (SPL) distribution for the simplified human body model, representing a person with a height of 1.60 meters, inside an acoustic enclosure featuring an absorbing wall. Simulations were conducted at multiple frequencies: 20, 50, 125, 160, 300, 500, and 1000 Hz to evaluate frequency-dependent scattering effects. At 160 Hz, the SPL distribution exhibits a distinct variation attributable to the presence of concealed objects, enhancing the detectability of hidden PVC inclusions within the model. This difference suggests that absorption by the enclosure walls improves the acoustic signature of concealed items, facilitating more effective identification compared to non-absorbing conditions.
The excitation signal used in this study is a linear frequency-modulated chirp spanning the frequency range 20–1000 Hz. A source level of 100 dB was selected to ensure adequate penetration and measurable scattered fields after interaction with clothing layers and biological tissues. Also, if we examine the phon (i.e., perceived loudness level) – dB relationship at low frequencies, based on equal-loudness contours, a much higher dB SPL is required to achieve the same phon value. From a human perspective, this extremely high sound level, exceeding 100 dB, is harmless. However, from a physical perspective, an absorption wall was incorporated into the experiment.
The absolute difference between SPL values in particular theta angles, presented in Figure 6, were calculated as follows:
where SPL0 is the baseline SPL value of flax-human-tissue (Case 1) and SPL1 represents the SPL value of flax-PVC-human-tissue (Case 2). The results are summarized in Table 3.
Table 3 presents the absolute differences in SPL values between the baseline, i.e., flax clothes-based human tissue model denoted as Case 1, and scenarios involving PVC-hidden cylinders, denoted as Case 2, measured at selected angles at 160 Hz. This analysis highlights the impact of the number of concealed objects on acoustic scattering and wave redirection.
We have also investigated whether the 160 Hz frequency matches a cabin’s modal frequency. Room modes occur when sound waves reflect and interfere, forming standing waves at specific frequencies. For a rectangular room, the modal frequencies are determined by:
where c is the speed of sound in air, , , are mode numbers (0,1,2,...) in each direction, and L, W, and H are room dimensions (length, width, height).
In the case of lengthwise mode (x-direction): . This results in possible frequency multiples of 57.16 Hz, 85.74 Hz, 114.32 Hz, 142.9 Hz, and 171.5 Hz. The 160 Hz frequency is close to 142.9 Hz and 171.5 Hz, so it might resonate weakly.
For the widthwise mode (y-direction): , with possible multiples of 114.3 Hz and 171.5 Hz. In this case, 160 Hz does not perfectly match but is close to 171.5 Hz, so some marginal coupling may occur.
For the heightwise mode (z-direction and assuming H = 2.5m): . The possible multiples are 137.2 Hz, 205.8 Hz. In this case, the frequency of 160 Hz does not align with these values but sits between nearby harmonics.
5. Discussion
Influence of the Number of Hidden Cylinders
A clear trend emerges in which the SPL differences increase with the number of hidden cylinders. Specifically, in the scenarios with two hidden PVC cylinders, the average SPL absolute differences are relatively moderate, at 4.62 and 12.69, respectively. However, in the cases involving four hidden cylinders, the average SPL absolute differences rise substantially, reaching 6.92 and 18.42. This increase suggests that the presence of more obstacles significantly alters the propagation of acoustic waves, likely due to enhanced scattering and reflection. Such findings indicate that configurations with more hidden elements may be more easily detectable through acoustic backscattering analysis.
Effect of the Absorption Wall
The introduction of an absorbing wall (as in Case 2) results in notably higher SPL differences compared to the corresponding cases without absorption (Case 1). This confirms that the absorbing boundary condition contributes to the dissipation of incident energy, thereby amplifying the SPL contrast between tissue-only and object-hidden scenarios. The impact is particularly strong in the Case 2 study, where both the number of cylinders and the absorbing wall contribute to the highest observed SPL differences.
In the rigid-wall configuration, the cabin boundaries are modeled as acoustically hard surfaces by imposing a sound-hard (Neumann) boundary condition, which corresponds to perfectly reflective walls with zero normal particle velocity and a reflection coefficient equal to one. In the partially absorbing configuration, the cabin walls are modeled using an impedance (Robin) boundary condition, which accounts for energy dissipation at the boundary. The impedance is chosen to represent a uniform, frequency-independent wall absorption corresponding to a specific absorption coefficient (Table 2 and ref. [25]).
Angular Distribution Observations
The angular distribution of SPL differences reveals that the most significant deviations occur at small forward angles, specifically in the ranges 0°–12° and 347°–360°. These angles correspond to the direction of wave propagation, where strong reflections and interference patterns result in elevated SPL values. This behaviour suggests that hidden objects have a greater impact on the acoustic field in the forward direction, particularly when the object configuration leads to constructive interference.
An analysis of SPL absolute differences at specific angular positions (θ = 4°, 7°, and 355°), as shown in Figure 6 and highlighted rows in Table 3, reveals a marked contrast between scenarios with and without the presence of an absorbing wall. In Case 2 (with the absorbing wall), these angles consistently show significantly higher SPL absolute differences for the two-cylinder configuration, reaching up to 37.55 at 4°, 24.39 at 7°, and 21.49 at 355°. In contrast, Case 1 (without the wall) yields much smaller differences at the same angles, approximately 1.96, 2.54, and 1.96, respectively. This pronounced disparity highlights the amplifying effect of the absorbing boundary on acoustic field perturbations caused by hidden objects. The absorbing wall reduces global reflections, thereby increasing the contrast between the baseline and perturbed configurations. As a result, concealed items become more detectable at specific forward and near-forward angular positions.
These angular positions likely correspond to zones of constructive interference, where acoustic path differences amplify SPL sensitivity to internal structural variations. This observation underscores the critical role of boundary condition design in acoustic sensing environments. It also suggests that targeting angular windows with high differential responses, such as θ = 4°, 7°, and 355°, can significantly enhance detection performance in practical applications. Lower SPL differences are observed at other angular positions, particularly at side angles (e.g., 90°, 120°) and in the backscattering region (e.g., 160°–180°). These regions are characterized by reduced acoustic radiation levels, especially in scenarios with symmetric geometries or the presence of absorbing boundaries. The observed attenuation in the backscattering domain is consistent with theoretical expectations for plane wave interactions, where most acoustic energy propagates forward rather than reflecting backward.
The Effect of Cabin Modal Frequencies
The 160 Hz frequency does not precisely match any primary modal frequencies but is close to several harmonics, especially around 171.5 Hz. This could potentially create a slight resonant response within the cabin. The results reinforce several important principles:
- -
- The width and strength of the main lobe increase as the number of hidden items increases.
- -
- Backscattering levels are generally lower for plane waves, especially with absorbing surroundings.
- -
- Detection becomes more efficient when the hidden structure significantly disturbs the wavefront, as seen in higher SPL differences.
- -
- A narrower main lobe and reduced side lobes are desirable for achieving better directional sensitivity in detection applications.
These findings offer practical guidance for designing acoustic detection systems and highlight the significance of wave-object interaction analysis in situations involving concealment structures.
This work uses the most appealing variant of a 2D model where scatterers are represented as infinitely long cylinders. This idealised approach is simpler to use in a simulation environment where an obstacle consists of multiple objects perceived as continuously heterogeneous fluid equivalents without compromising the scattering mechanisms. This configuration remains unchanged along the out-of-plane direction. This approximation is valid when the dominant acoustic interaction occurs in a plane perpendicular to that dimension. When the out-of-plane dimensions of the body, clothing, and objects vary slowly along that direction, and the assumption of spatially invariant mass density throughout all space holds, the scattered field can be reasonably approximated as quasi-two-dimensional. This means edge and end effects are minimal, and the infinite-cylinder assumption accurately describes the dominant scattering mechanisms.
We acknowledge that this approximation would no longer be valid at higher frequencies, where shear and mode-conversion effects become non-negligible.
6. Conclusions
This work presented the first study addressing a 2D numerical investigation of acoustic wave scattering involving a simplified human body model within an enclosed cabin, using the µ-diff MATLAB toolbox. The human model was constructed from cylindrical elements approximating biological tissues and included PVC inclusions to simulate concealed non-biological objects. The boundary condition assures the penetrable scattering condition. The simulation results revealed that:
- -
- The number of hidden items influences the scattered acoustic field. Increasing the number of PVC inclusions led to higher differences in SPL values, suggesting enhanced detectability through backscattering analysis.
- -
- Absorbing boundary conditions amplified SPL contrasts, especially in scenarios with multiple hidden objects. The presence of an acoustic absorbing wall reduced global reflections and improved the localization of scattering caused by concealed items.
- -
- Angular analysis revealed that SPL differences were most pronounced in the forward direction (0°–12° and 347°–360°), where wave-object interactions generated strong constructive interference. In contrast, backscattering angles exhibited minimal variation, indicating lower energy radiation in those directions for plane wave incidence.
- -
- The cabin’s fundamental modal frequencies have no significant influence on the backscattering frequency used for hidden-item detection, although they can generate a weak resonant response inside the cabin.
These findings confirm that both object configuration and enclosure boundary conditions play a crucial role in the acoustic signature of the scene. By combining numerical simulation with directional SPL analysis, this work contributes to the development of wave-based, non-invasive detection techniques applicable in enclosed environments such as transport cabins or security checkpoints.
The 2D formulation serves primarily as a proof-of-concept and a computationally efficient framework for exploring the underlying physical mechanisms and the practicality of the proposed detection strategy. While it effectively captures the essential low-frequency impedance-based scattering behaviour, we recognise that fully three-dimensional effects like finite-length scattering out-of-plane diffraction and edge phenomena are not accounted for. Future research could focus on extending this framework to three-dimensional models and real-time inverse reconstruction algorithms, further improving the effectiveness and applicability of acoustic detection systems in practical scenarios.
Author Contributions
Conceptualization, L.M.; methodology, L.M.; software, D.B.; validation, L.M. and D.B.; formal analysis, L.M.; investigation, D.B.; writing—original draft preparation, L.M.; writing—review and editing, L.M. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the European Union’s Horizon Europe research and innovation programme and the Swiss Confederation under grant agreement No 101073899, PROJECT Mechanical Impedance and Multiphysics Concealed and Hidden Objects Interrogation (MELCHIOR).
Data Availability Statement
The data supporting the findings of this study are restricted due to contractual reasons of MELCHIOR PROJECT, No 101073899. Data sharing is therefore not applicable, consistent with MDPI Research Data Policies.
Acknowledgments
During the preparation of this manuscript, the authors used large language models, for superficial text editing. This included grammar, punctuation, and wording. However, all AI-assisted text was reviewed, edited, and verified by the authors. The tools were not used to generate, analyse, or interpret scientific data, and all references were manually checked for accuracy. The authors have reviewed and edited the output and take full responsibility for the content of this publication.
Conflicts of Interest
The authors declare no conflicts of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript.
References
- Alzahrani, S.M.; Antoine, X.; Chniti, C. Computation of multiple scattering problems by circular cylinders. Math. Rep. 2022, 24, 37-53.
- Zhan, W.; Zhuang, M.; Liu, Q.Q.; Shi, L.; Sun, Y.; Liu, Q.H. Frequency domain spectral element method for modelling poroelastic waves in 3-D anisotropic, heterogeneous and attenuative porous media, Geophys. J. Int. 2021, 227, 2, 1339-1353. [CrossRef]
- Li, R.; Prozzi, J.A.; Hong, F. Quantification of Post-Rainfall Moisture Content in Pavement Unbound Layers Using Long-Term Pavement Performance Data, Transp. Res. Rec. 2025. [CrossRef]
- Hesford, A. J.; Chew, W. C. Fast inverse scattering solutions using the distorted Born iterative method and the multilevel fast multipole algorithm. J. Acoust. Soc. Am. 2010, 128(2), 679-690. [CrossRef]
- Haddadin, O.S.; Ebbini, E.S. Multiple Frequency Distorted Born Iterative Method for Tomographic Imaging. In: Lees, S.; Ferrari, L.A. (eds) Acoustical Imaging, vol. 23; Springer: Boston, MA, 2019; pp. 613-619. [CrossRef]
- Antoine, X.; Chniti, C.; Ramdani, K. On the numerical approximation of high-frequency acoustic multiple scattering problems by circular cylinders. J. Comput. Phys. 2008, 227, 1754-1771. [CrossRef]
- Acosta, S. On-surface radiation condition for multiple scattering of waves. Comput. Methods Appl. Mech. Eng. 2015, 283, 1296-1314. [CrossRef]
- Antoine, X.; Darbas, M. Alternative integral equations for the iterative solution of acoustic scattering problems. Q. Jl Mech. Appl. Math. 2005, 58, 107-128. [CrossRef]
- Dupont, R. An arbitrary-order Virtual Element Method for the Helmholtz equation applied to wave field calculation in port, Results Appl. Math. 2025, 26, 100598. [CrossRef]
- Vuik, C. Krylov Subspace Solvers and Preconditioners. ESAIM Proc. Surv. 2018, 63, 1-43. [CrossRef]
- Bibicu, D.; Florescu Culea, A.; Moldovanu, S.; Moraru, L. 2D multiple waves scattering for active detection of a dummy human body in a low frequency range and for various boundary conditions. J. Phys.: Conf. Ser. 2024, 2701, 012012. [CrossRef]
- Thierry, B.; Antoine, X.; Chniti, C.; Alzubaidi, H. µ-diff: an open-source MATLAB toolbox for computing multiple scattering problems by disks. Comput. Phys. Commun. 2015, 192, 348-362. [CrossRef]
- Meng, W.; Cui, J. Fast multipole boundary element method for solving 2-D acoustic scattering problem with random multiple obstacles. J. Numer. Methods Comput. Appl. 2010, 31(2), 141-152,. [CrossRef]
- Kirkup, S. The boundary element method in acoustics: A survey. Appl. Sci. 2019, 9, 1642. [CrossRef]
- Zhao, G. Finite element boundary element numerical simulation study on acoustic vibration coupling problems. Measurement: Sensors. 2024, 33, 101133. [CrossRef]
- Fu, Y.; Wang, X.; Zhang, G.; Hong, Z. Two-dimensional time-domain boundary element method with impedance boundary condition for unsteady acoustic coupling problems. Eng. Anal. Bound. Elem. 2025, 177, 106266. [CrossRef]
- Ganesh, M.; Hawkins, S.C. A fast high order algorithm for multiple scattering from large sound-hard three-dimensional configurations. J. Comput. Appl. Math. 2019, 362, 324-340. [CrossRef]
- Shishlenin, M.; Kozelkov, A.; Novikov, N. Nonlinear medical ultrasound tomography: 3D modeling of sound wave propagation in human tissues. Mathematics. 2024, 12, 212. [CrossRef]
- Fernandes, N.A.T.C.; Sharma, S.; Arieira, A.; Hinckel, B.; Silva, F.; Leal, A.; Carvalho, Ó. Experimental validation of time-explicit ultrasound propagation models with sound diffusivity or viscous attenuation in biological tissues using COMSOL Multiphysics. Bioengineering, 2025, 12, 946. [CrossRef]
- Dance, S.M.; Shield, B.M. Modelling of sound fields in enclosed spaces with absorbent room surfaces. Part I: performance spaces. Appl. Acoust. 1999, 58(1), 1-18. [CrossRef]
- Desiderio, L.; Falletta, S.; Ferrari, M.; Scuderi, L. On the coupling of the curved virtual element method with the one-equation boundary element method for 2D exterior Helmholtz problems, SIAM J. Numer. Anal. 2022, 60, 4. [CrossRef]
- Alzubaidi, H.; Antoine, X.; Chniti, C. Formulation and accuracy of on-surface radiation conditions for acoustic multiple scattering problems. Appl. Math. Comput. 2016, 277, 82-100. [CrossRef]
- Kress, R. Linear Integral Equations, 2nd ed.; Springer: Berlin, Germany, 1999.
- Colton, D.; Kress, R. Inverse Acoustic and Electromagnetic Scattering Theory, 3rd ed.; Springer: Berlin, Germany, 2013.
- Karhu, M.; Lindroos, T.; Uosukainen, S.; Manufacturing and modelling of sintered micro-porous absorption material for low frequency applications, Applied Acoustics. 2014, 85, 150-160. [CrossRef]
Figure 1.
The simplified human body model represents a person with a height of 1.60 meters, constructed from vertically stacked cylindrical elements that approximate human anatomical proportions. The model uses the following color coding to differentiate materials based on their acoustic properties: Yellow represents the head and bone tissue, with an acoustic speed of 4080 m/s; Black denotes fat tissue, with a speed of 1450 m/s; Turquoise indicates muscle tissue, with a speed of 1580 m/s; Green represents clothing (flax material), with an acoustic speed of 650 m/s; Red highlights hidden items (PVC), with a speed of 1409 m/s. Blue corresponds to the absorbing wall made of SD material, with an acoustic speed of 228 m/s.
Figure 1.
The simplified human body model represents a person with a height of 1.60 meters, constructed from vertically stacked cylindrical elements that approximate human anatomical proportions. The model uses the following color coding to differentiate materials based on their acoustic properties: Yellow represents the head and bone tissue, with an acoustic speed of 4080 m/s; Black denotes fat tissue, with a speed of 1450 m/s; Turquoise indicates muscle tissue, with a speed of 1580 m/s; Green represents clothing (flax material), with an acoustic speed of 650 m/s; Red highlights hidden items (PVC), with a speed of 1409 m/s. Blue corresponds to the absorbing wall made of SD material, with an acoustic speed of 228 m/s.
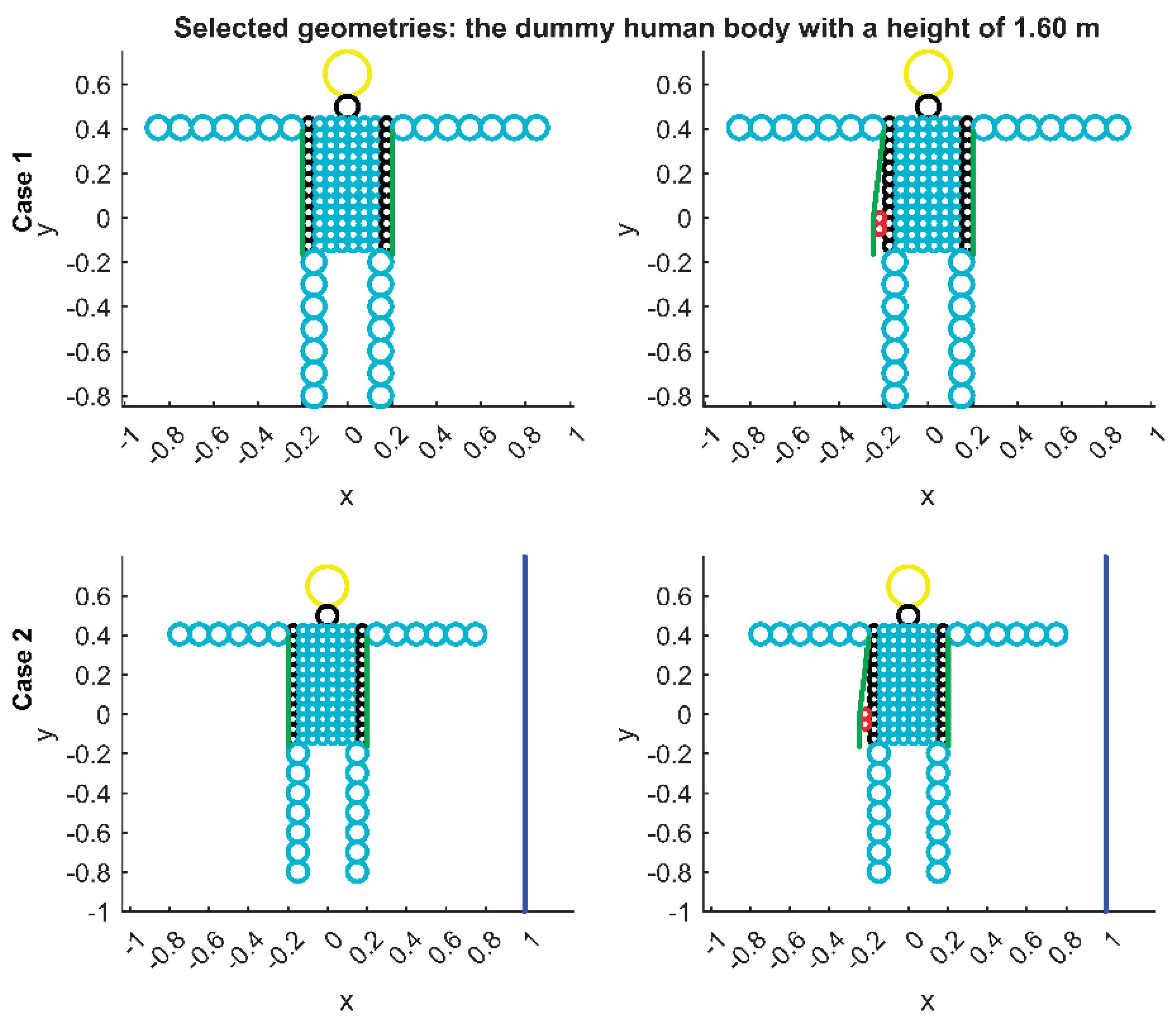
Figure 2.
Simulation Case 1 (without absorbing wall) features two PVC cylindrical inclusions representing hidden items within a simplified human body model, corresponding to a person 1.60 meters tall. The acoustic field distribution is presented as follows: the real part (1st column), the imaginary part (2nd column), and the magnitude of the total acoustic field (3rd column). The simulation assumes rigid, fully reflective enclosure walls (non-absorbing boundary conditions). The first row displays the acoustic field with only the clothing layer. The second row shows the field with the clothing layer plus two PVC cylindrical inclusions, simulating hidden objects. The simulation is conducted at a frequency of 160 Hz. The acoustic cabin measures 6 metres in length and 2.5 metres in width. The x and y axes are measured in metres.
Figure 2.
Simulation Case 1 (without absorbing wall) features two PVC cylindrical inclusions representing hidden items within a simplified human body model, corresponding to a person 1.60 meters tall. The acoustic field distribution is presented as follows: the real part (1st column), the imaginary part (2nd column), and the magnitude of the total acoustic field (3rd column). The simulation assumes rigid, fully reflective enclosure walls (non-absorbing boundary conditions). The first row displays the acoustic field with only the clothing layer. The second row shows the field with the clothing layer plus two PVC cylindrical inclusions, simulating hidden objects. The simulation is conducted at a frequency of 160 Hz. The acoustic cabin measures 6 metres in length and 2.5 metres in width. The x and y axes are measured in metres.
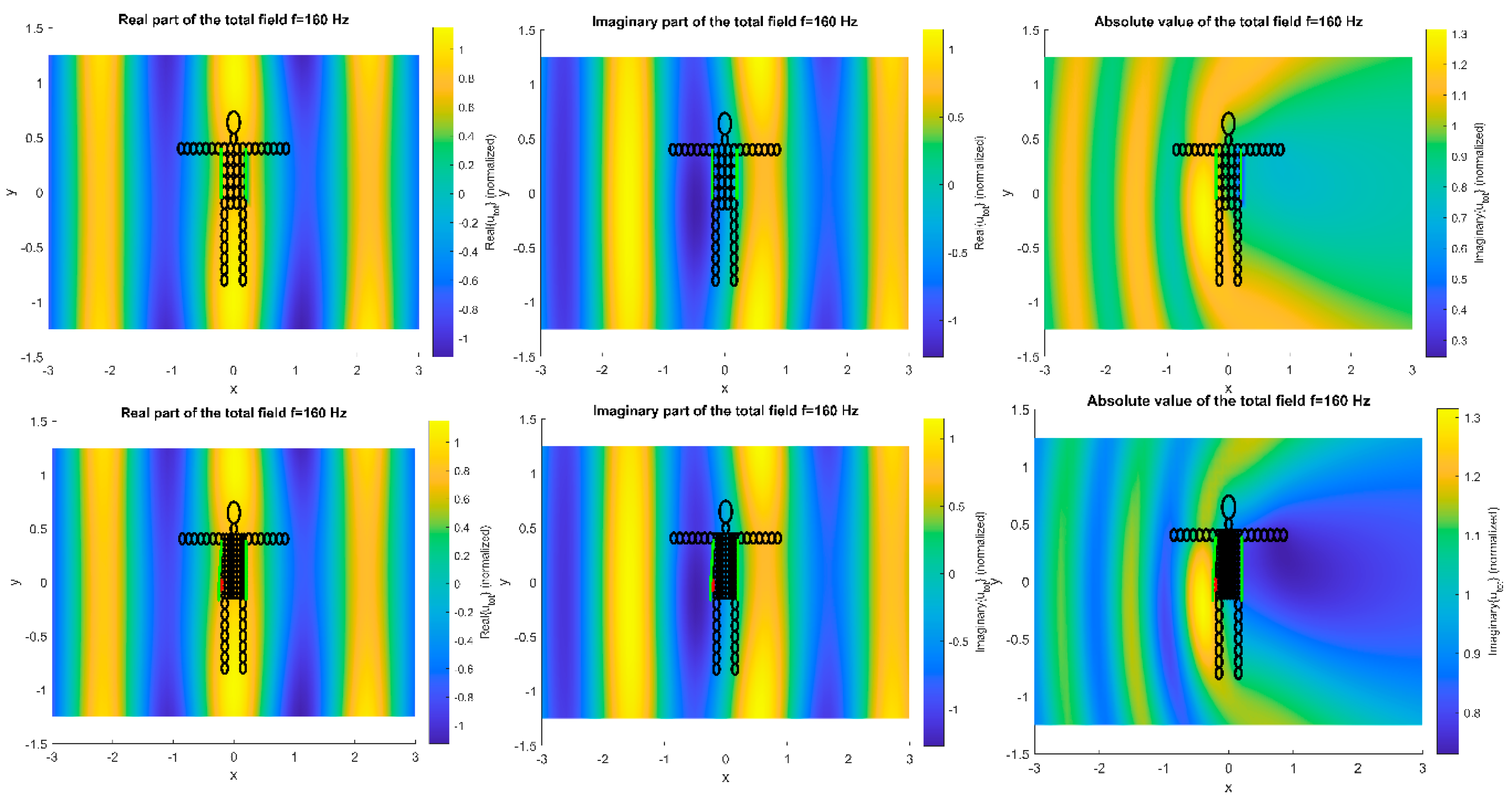
Figure 3.
Simulation Case 2 (with absorbing wall included in the acoustic enclosure) features two PVC cylindrical inclusions representing hidden items within a simplified human body model, corresponding to a person 1.60 meters tall. The acoustic field distribution is presented as follows: the real part (1st column), the imaginary part (2nd column), and the magnitude of the total acoustic field (3rd column). The simulation assumes rigid, fully reflective enclosure walls (non-absorbing boundary conditions). The first row displays the acoustic field with only the clothing layer. The second row shows the field with the clothing layer plus two PVC cylindrical inclusions, simulating hidden objects. The simulation is conducted at a frequency of 160 Hz. The acoustic cabin measures 6 metres in length and 2.5 metres in width. The x and y axes are measured in metres.
Figure 3.
Simulation Case 2 (with absorbing wall included in the acoustic enclosure) features two PVC cylindrical inclusions representing hidden items within a simplified human body model, corresponding to a person 1.60 meters tall. The acoustic field distribution is presented as follows: the real part (1st column), the imaginary part (2nd column), and the magnitude of the total acoustic field (3rd column). The simulation assumes rigid, fully reflective enclosure walls (non-absorbing boundary conditions). The first row displays the acoustic field with only the clothing layer. The second row shows the field with the clothing layer plus two PVC cylindrical inclusions, simulating hidden objects. The simulation is conducted at a frequency of 160 Hz. The acoustic cabin measures 6 metres in length and 2.5 metres in width. The x and y axes are measured in metres.
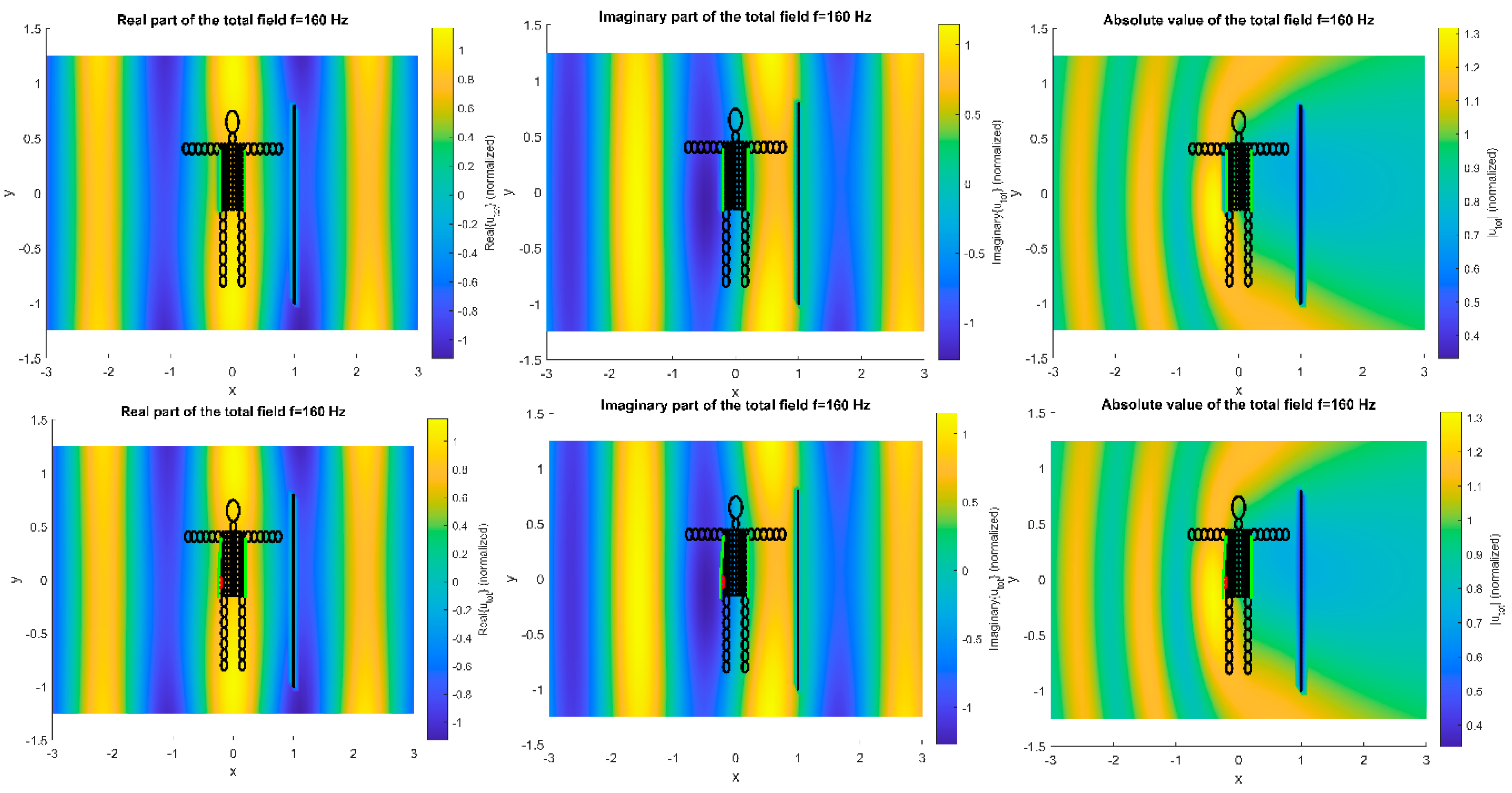
Figure 4.
Simulation Case 1: The sound pressure level (SPL) distribution for acoustic scattering in a simplified human body model (height: 1.60 meters) containing two PVC cylindrical inclusions representing concealed items. The clothing layer is modelled as flax material, and the enclosure walls are considered rigid and fully reflective (non-absorbing). Simulations are performed at frequencies of 20, 50, 125, 160, 300, 500, and 1000 Hz. The right-side image illustrates the SPL distribution at 160 Hz, highlighting subtle but detectable changes caused by the concealed items.
Figure 4.
Simulation Case 1: The sound pressure level (SPL) distribution for acoustic scattering in a simplified human body model (height: 1.60 meters) containing two PVC cylindrical inclusions representing concealed items. The clothing layer is modelled as flax material, and the enclosure walls are considered rigid and fully reflective (non-absorbing). Simulations are performed at frequencies of 20, 50, 125, 160, 300, 500, and 1000 Hz. The right-side image illustrates the SPL distribution at 160 Hz, highlighting subtle but detectable changes caused by the concealed items.
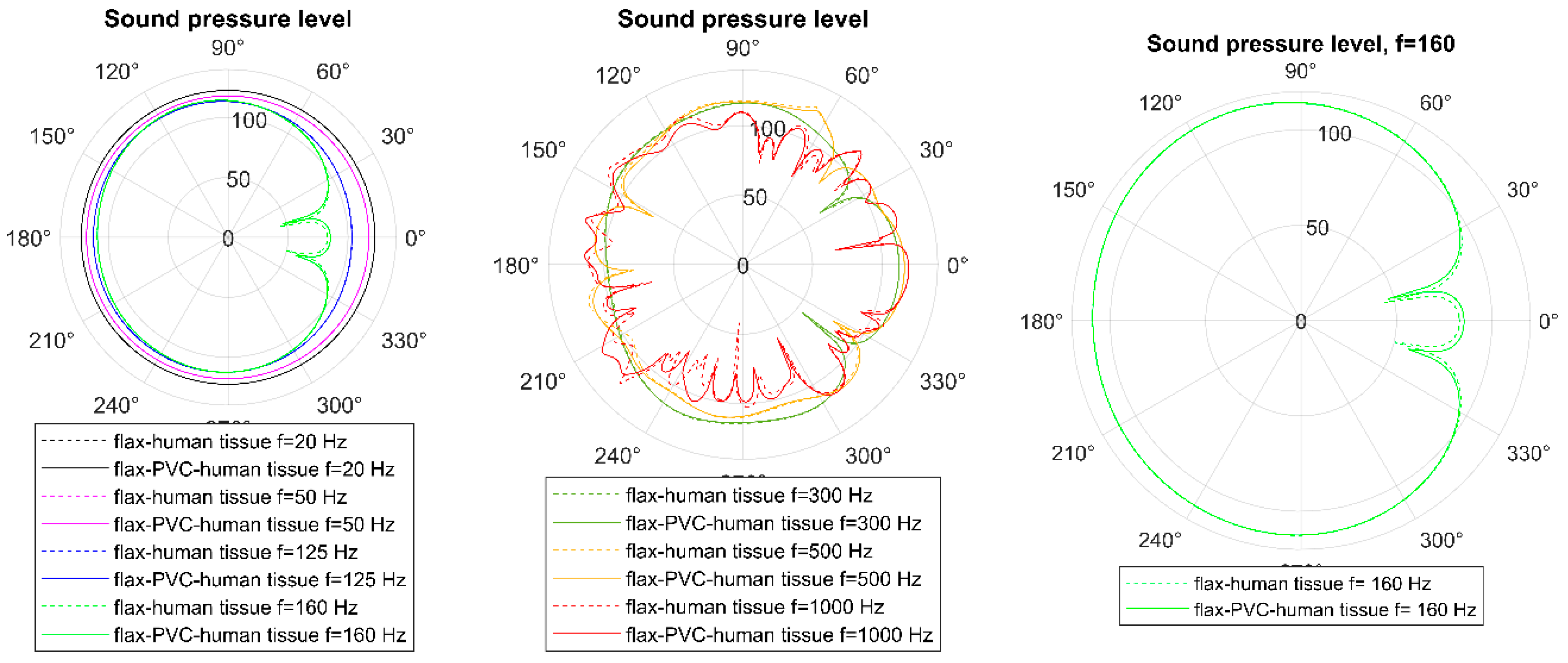
Figure 5.
Simulation Case 2: The sound pressure level (SPL) distribution for acoustic scattering in a simplified human body model (height: 1.60 meters) containing two PVC cylindrical inclusions representing concealed items. There is an absorbing wall included in the acoustic enclosure. The clothing layer is modelled as flax material. Simulations are performed at frequencies of 20, 50, 125, 160, 300, 500, and 1000 Hz. The right-side image illustrates the SPL distribution at 160 Hz, highlighting a clearly detectable difference that facilitates the identification of the concealed object.
Figure 5.
Simulation Case 2: The sound pressure level (SPL) distribution for acoustic scattering in a simplified human body model (height: 1.60 meters) containing two PVC cylindrical inclusions representing concealed items. There is an absorbing wall included in the acoustic enclosure. The clothing layer is modelled as flax material. Simulations are performed at frequencies of 20, 50, 125, 160, 300, 500, and 1000 Hz. The right-side image illustrates the SPL distribution at 160 Hz, highlighting a clearly detectable difference that facilitates the identification of the concealed object.
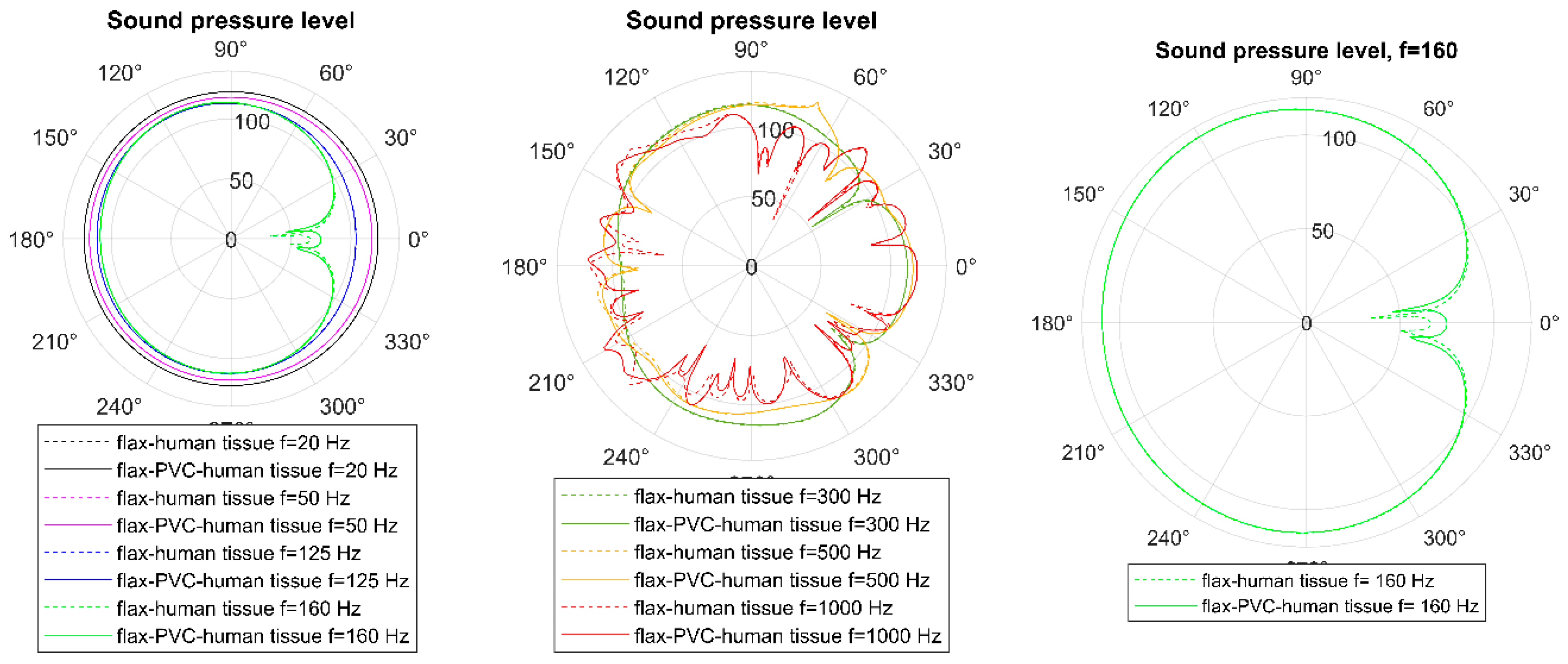
Figure 6.
The specific angles analysed in the SPL diagrams from Figure 4 and Figure 5 correspond to those used to calculate the SPL differences presented in Table 3. The first column represents the model containing two PVC cylinders as hidden items, without an absorbing wall. The second column corresponds to the same model with two PVC cylinders as hidden items, but with an absorbing wall inserted into the cabin.
Figure 6.
The specific angles analysed in the SPL diagrams from Figure 4 and Figure 5 correspond to those used to calculate the SPL differences presented in Table 3. The first column represents the model containing two PVC cylinders as hidden items, without an absorbing wall. The second column corresponds to the same model with two PVC cylinders as hidden items, but with an absorbing wall inserted into the cabin.
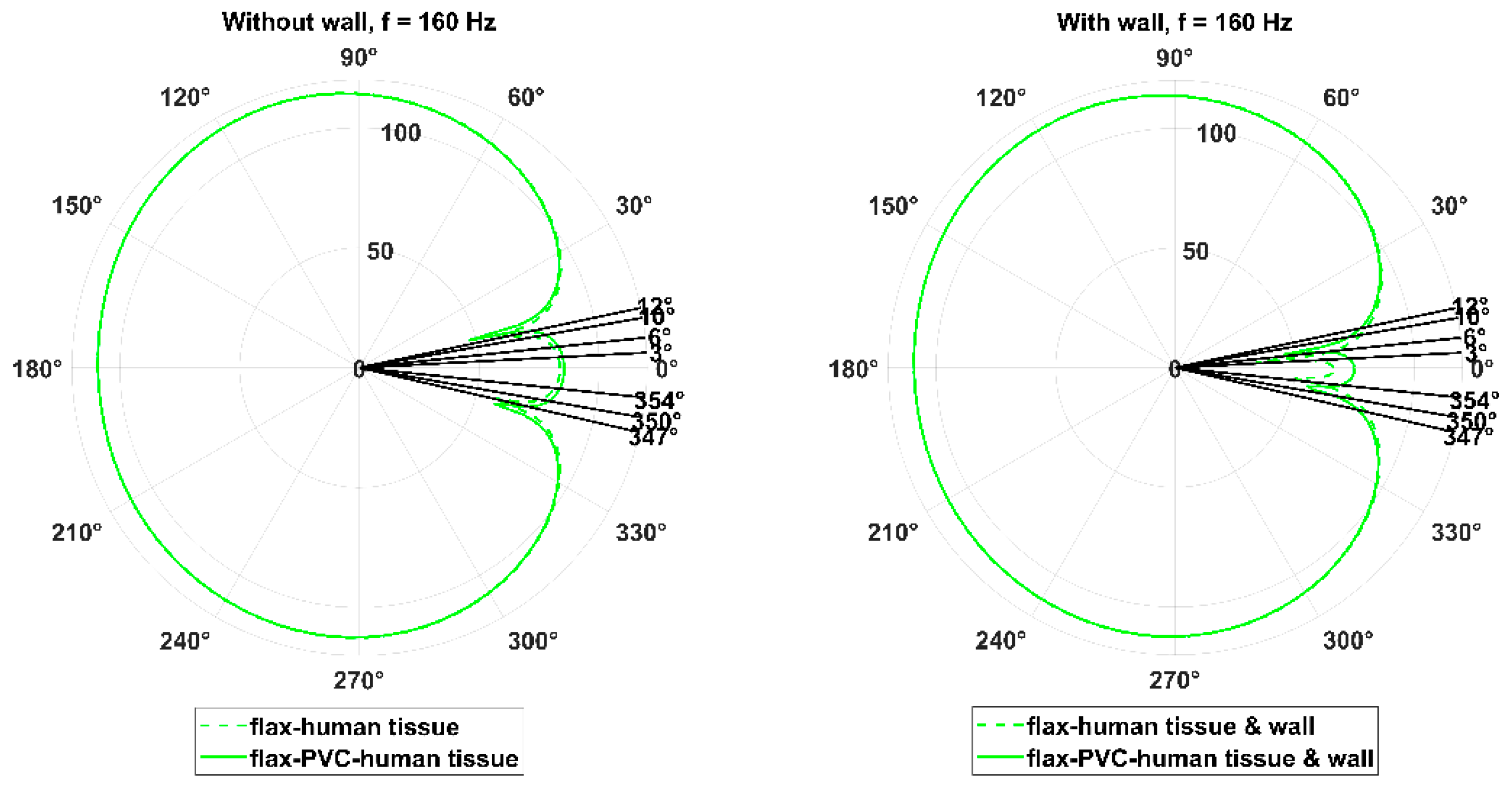
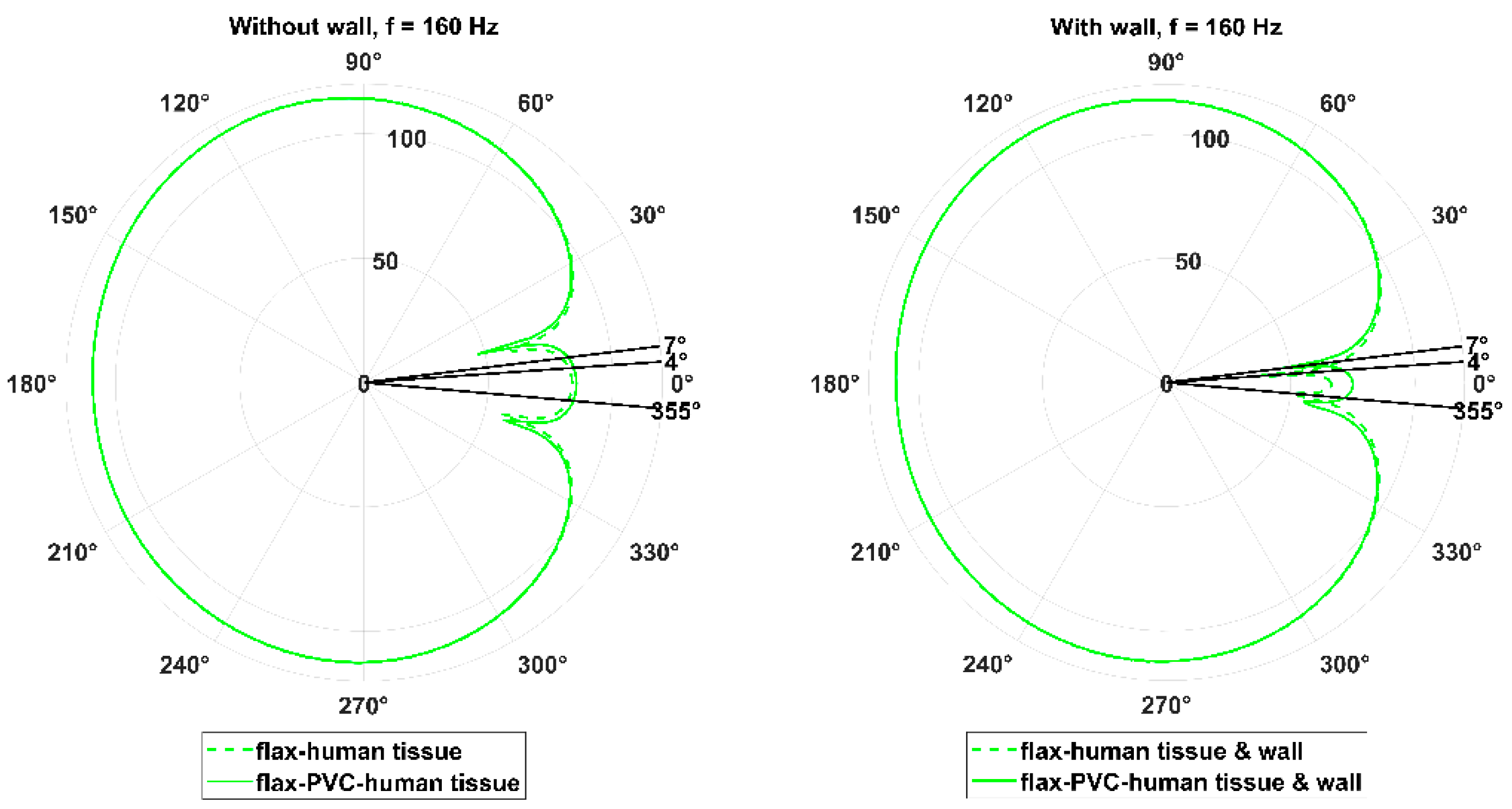

Table 1.
Acoustic speed and density (20–1000 Hz).
| Materials | Sound speed (m/s) | Density (kg/m3) |
|---|---|---|
| Air (20 °C, 1 atm) | 343 | 1.20 |
| Bone (cortical) | 4080 | 1900 |
| Fat | 1450 | 911 |
| Muscle | 1580 | 1040 |
| Flax (fabric) | 650 | 280 |
| PVC | 1409 | 1400 |
Table 2.
The wall material is commercial polyester (SD) foams with the following characteristics [25].
Table 2.
The wall material is commercial polyester (SD) foams with the following characteristics [25].
| Porous material |
Flow resistivity (Nm/s4) |
Density (kg/m³) |
Porosity | Tortuosity | Viscous characteristic length (m) |
|---|---|---|---|---|---|
| SD | 26,000 | 25 | 0.98 | 2.37 | 28 e-6 |
|
Young’s modulus (Pa) |
Loss factor |
Poisson’s ratio |
Sound velocity (m/s) |
Thermal characteristic length (m) |
|
| 130,000 | 0.1 | 0.4 | 228 | 144 e-6 |
Table 3.
The SPL absolute differences between the flax-based human tissue model (Case 1) and the flax-PVC model with concealed objects (Case 2) were analysed at selected angular positions (θ). The analysis is conducted at a frequency of 160 Hz.
Table 3.
The SPL absolute differences between the flax-based human tissue model (Case 1) and the flax-PVC model with concealed objects (Case 2) were analysed at selected angular positions (θ). The analysis is conducted at a frequency of 160 Hz.
| θ [o] | 2 PVC hidden cylinders | 3 PVC hidden cylinders | 4 PVC hidden cylinders | |||
|---|---|---|---|---|---|---|
| CASE 1 diff |
CASE 2 diff |
CASE 1 diff |
CASE 2 diff |
CASE 1 diff |
CASE 2 diff |
|
| 0 | 1.74 | 8.74 | 2.45 | 10.98 | 3.08 | 12.71 |
| 3 | 1.88 | 14.5 | 2.62 | 17.27 | 3.29 | 19.31 |
| 4 | 1.96 | 37.55 | 2.74 | 40.82 | 3.43 | 43.12 |
| 6 | 2.28 | 0 | 3.17 | 6.4 | 3.94 | 7.32 |
| 7 | 2.54 | 24.39 | 3.51 | 5.18 | 4.34 | 26.06 |
| 10 | 4.45 | 4.89 | 5.92 | 8.62 | 7.14 | 14.96 |
| 12 | 12.74 | 2.96 | 15.38 | 4.77 | 17.33 | 6.96 |
| 354 | 2.1 | 14.21 | 2.93 | 18.04 | 3.66 | 20.63 |
| 350 | 3.54 | 7.78 | 4.8 | 17.52 | 5.87 | 17.4 |
| 347 | 15.72 | 3.11 | 18.58 | 5.05 | 20.68 | 7.44 |
| 355 | 1.96 | 21.49 | 2.74 | 24.57 | 3.44 | 26.78 |
| Average | 4.62 | 12.69 | 5.89 | 14.47 | 6.92 | 18.42 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



