Submitted:
11 December 2025
Posted:
12 December 2025
You are already at the latest version
Abstract
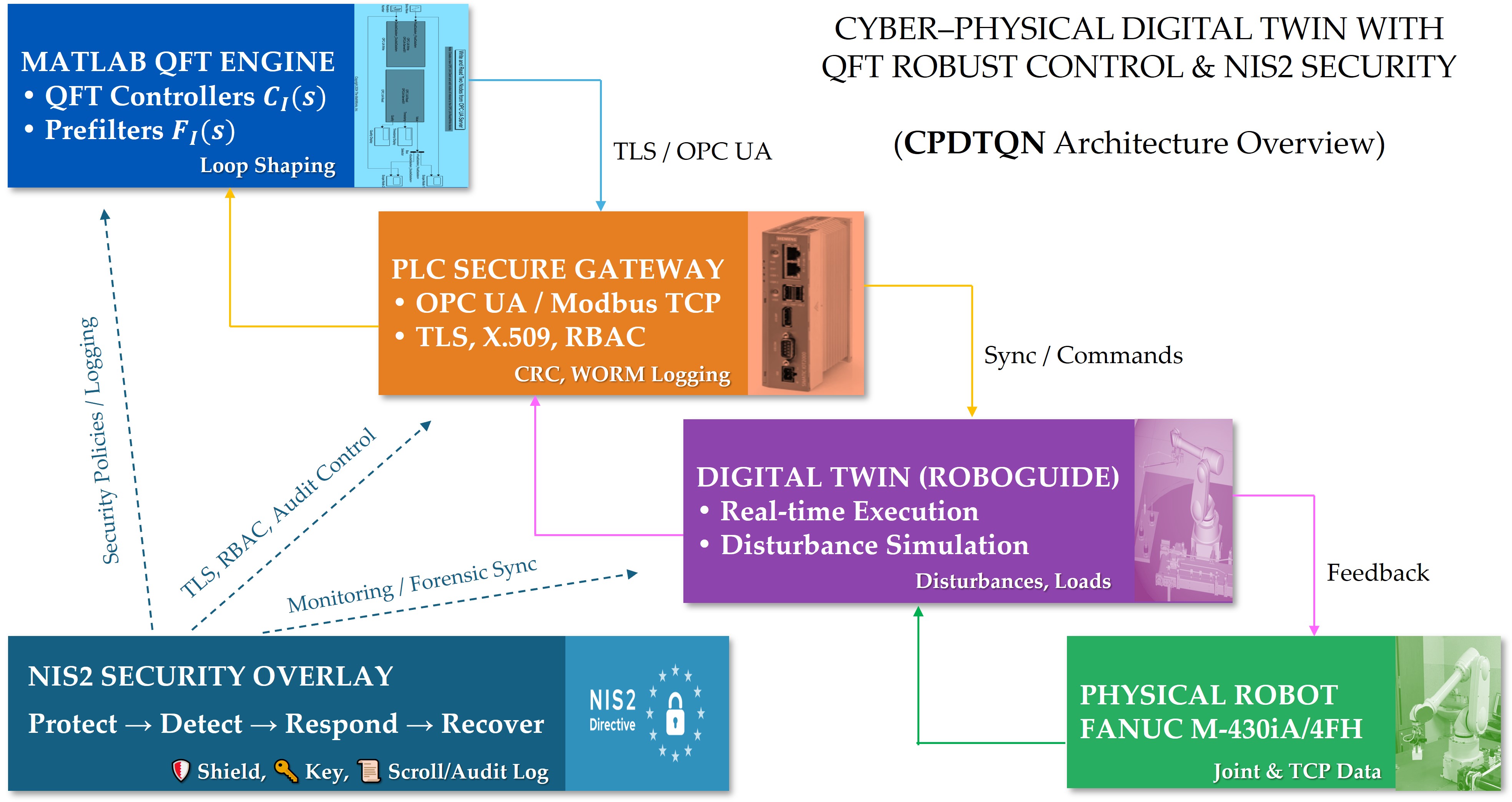
The article presents an integrated framework for robust control and cybersecurity of an industrial robot, combining Quantitative Feedback Theory (QFT), Digital Twin (DT) technology, and PLC-based architecture aligned with the requirements of the NIS2 Directive. The proposed concept, denoted as Cyber-Physical Digital Twin with QFT & NIS2 Security (CPDTQN), unifies control, observability, synchronization, and traceability mechanisms within a single cyber-physical structure. The study employs the five-axis industrial manipulator FANUC M-430iA/4FH, modeled as a set of SISO servo-axis channels subject to parametric uncertainty and external disturbances. For each axis, QFT controllers and prefilters are synthesized, and the system performance is evaluated using joint-space and TCP-space metrics, including maximum error, RMS error, and 3D positional deviation. A CPDTQN architecture is proposed in which the QFT controllers are executed in MATLAB, a Siemens PLC (CPU 1215C, FW v4.5) provides deterministic communication via Modbus TCP, OPC UA, and NTP/PTP synchronization, and the digital twin implemented in FANUC ROBOGUIDE reproduces the robot’s kinematics and dynamics in real time. This represents one of the first architectures that simultaneously integrates QFT control, real PLC-in-the-loop execution, a synchronized digital twin, and NIS2-oriented mechanisms for observability and traceability. Simulation results using nominal and worst-case dynamic models, as well as scenarios with externally applied torque disturbances, demonstrate that the system maintains robustness and tracking accuracy within the prescribed performance criteria. Furthermore, the study analyzes how the proposed CPDTQN architecture supports key NIS2 principles, including command traceability, disturbance resilience, access control, and mechanisms for forensic reconstruction in robotic manufacturing systems.
Keywords:
1. Introduction
1.1. Motivation
1.2. Main Contributions
- (1)
- Robust QFT control of a five-axis industrial manipulator. A control-oriented model of the servo axes of the FANUC M-430iA/4FH is developed, on which QFT controllers and prefilters are synthesized, ensuring robust tracking under parametric uncertainty, external disturbances, and varying loads. This extends existing QFT applications, which typically consider only simulation environments.
- (2)
- Partially decoupled multi-axis QFT formulation. A methodology is presented in which the dominant nonlinearities are compensated, while the residual interactions are treated as structured uncertainty, enabling synthesis via standard QFT bounds without requiring full dynamic inversion - a rarely applied approach in the literature.
- (3)
- Twin-based validation through CPDTQN architecture. An integrated MATLAB-PLC-ROBOGUIDE system with Modbus TCP, OPC UA, and PTP synchronization is implemented, enabling evaluation of the controller under conditions close to real industrial environments, including communication delays, PLC cycle timing, and worst-case dynamic models. This combination of QFT control, PLC-in-the-loop execution, and a synchronized digital twin is practically absent from prior research.
- (4)
- NIS2-oriented cyber-resilient architecture. The PLC is treated not merely as an execution device but as a protected zero-trust gateway with TLS protection, X.509 authentication, CRC verification, WORM-based logging, and forensic analysis capabilities. This augments the digital twin architecture with mechanisms for traceability, observability, and security in line with NIS2.
- (5)
- Quantitative twin-based evaluation via RMS, maximum, and 3D TCP error. Unified metrics are introduced for comparing MATLAB/QFT behavior with twin-based execution, including nominal, worst-case, and disturbed scenarios. The results demonstrate close alignment between simulation and twin execution, as well as absence of negative impact from the security mechanisms-representing a novel contribution to the cyber-resilience analysis of robotic systems.
1.3. Structure of the Paper
2. Related Work
2.1. Robust Control, Digital Twins, and Industrial Communication
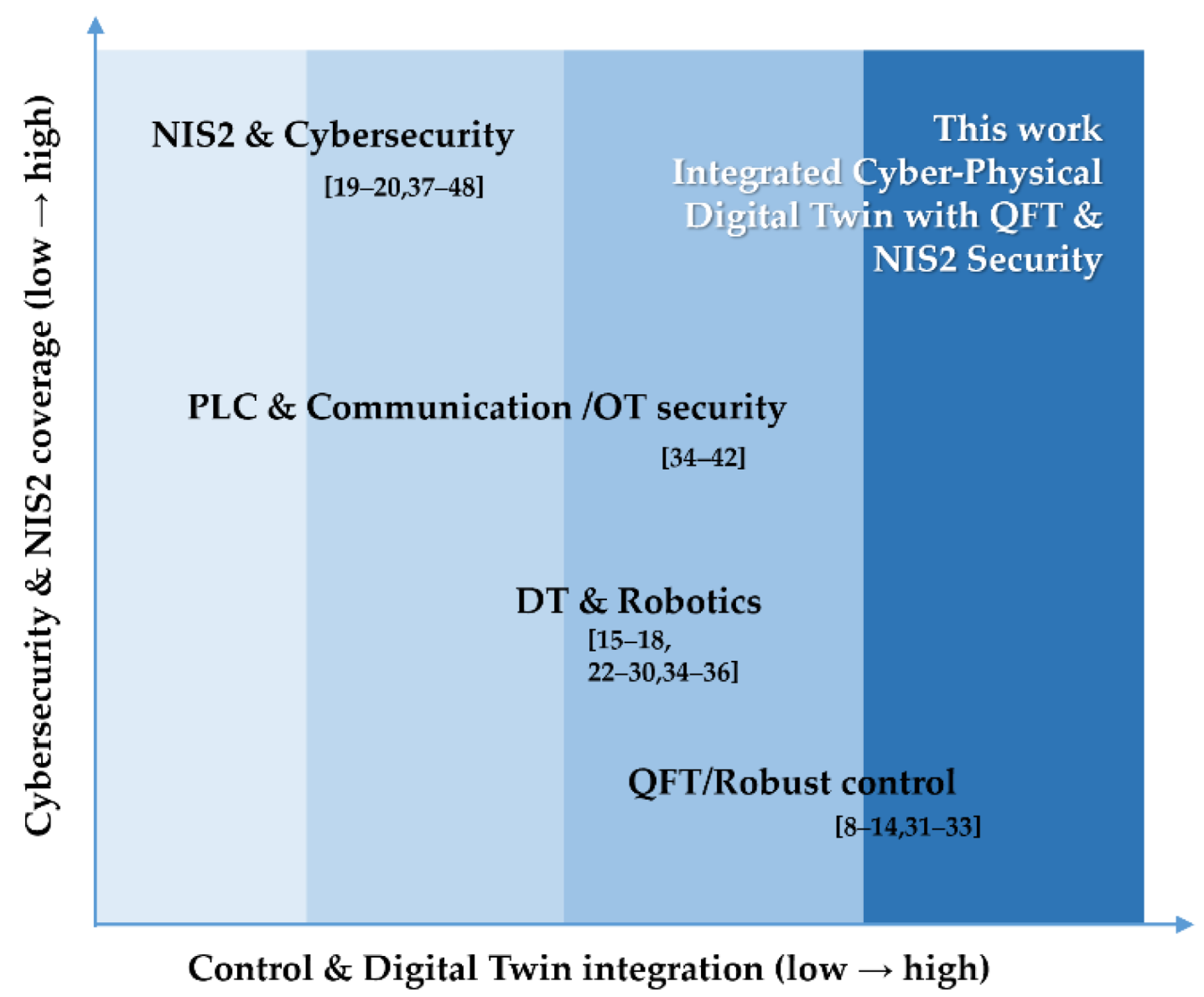
2.2. Research Gaps and Positioning of the Present Work
- incorporates multiple uncertainty models [10,13,31,32],
- treats the PLC as a deterministic security gateway [34,35,36,37,38,39],
- integrates a bidirectional DT for real-time diagnostics [25,26,27,28,29,30],
- applies regulatory NIS2-compliant mechanisms [19,20,46,47,48].
3. CPDTQN Architecture for the FANUC M-430iA/4FH Robot
3.1. Digital Twin Concept and Objectives
- Accurate virtual modelling. The twin uses a 3D model with hierarchical links, a defined TCP, and coordinate frames. Alignment with the physical robot is ensured through transformation matrices between ROBOGUIDE, the PLC, and MATLAB, analogous to the approaches described in Section 4.
- Real-time synchronization. The data exchange includes joint angles, statuses, and diagnostic registers at frequencies of 20-50 Hz for motion - critical signals and 50-200 Hz for telemetry. These values are consistent with the PLC scan cycle and the communication constraints of the industrial infrastructure.
- Support for QFT-based control. The digital twin receives trajectories, inverse kinematics (IK) is computed in MATLAB, movement is visualized, and measurements are returned, enabling comparison between nominal and worst-case models. This supports robustness analysis under disturbances.
- Reduction of risk and setup time. ROBOGUIDE enables validation of trajectories, collision scenarios, end-effector positioning, and control strategies without interrupting the production process.
- NIS2-compliant observability. The digital twin maintains NTP/PTP synchronization, centralized logging, and IAM integration, ensuring traceability and access control.
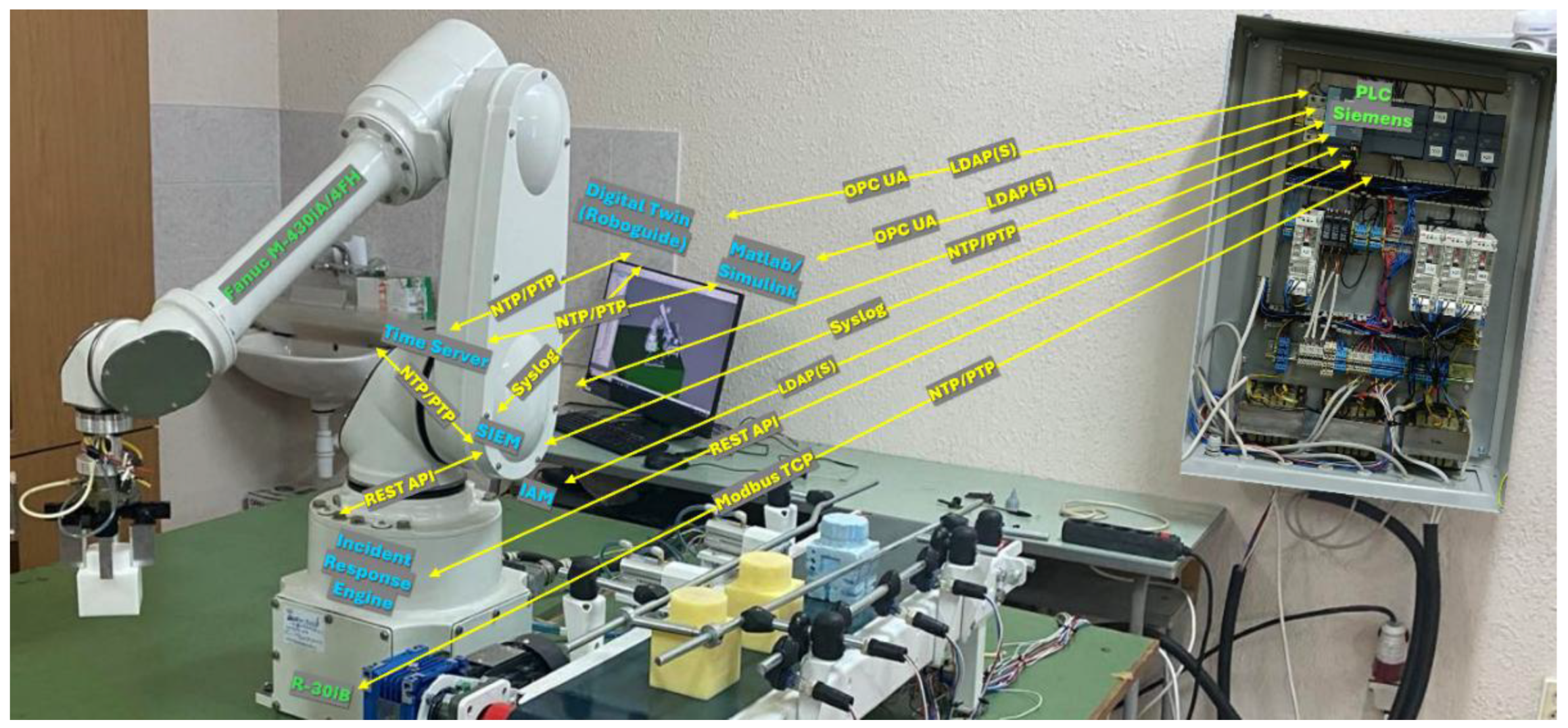
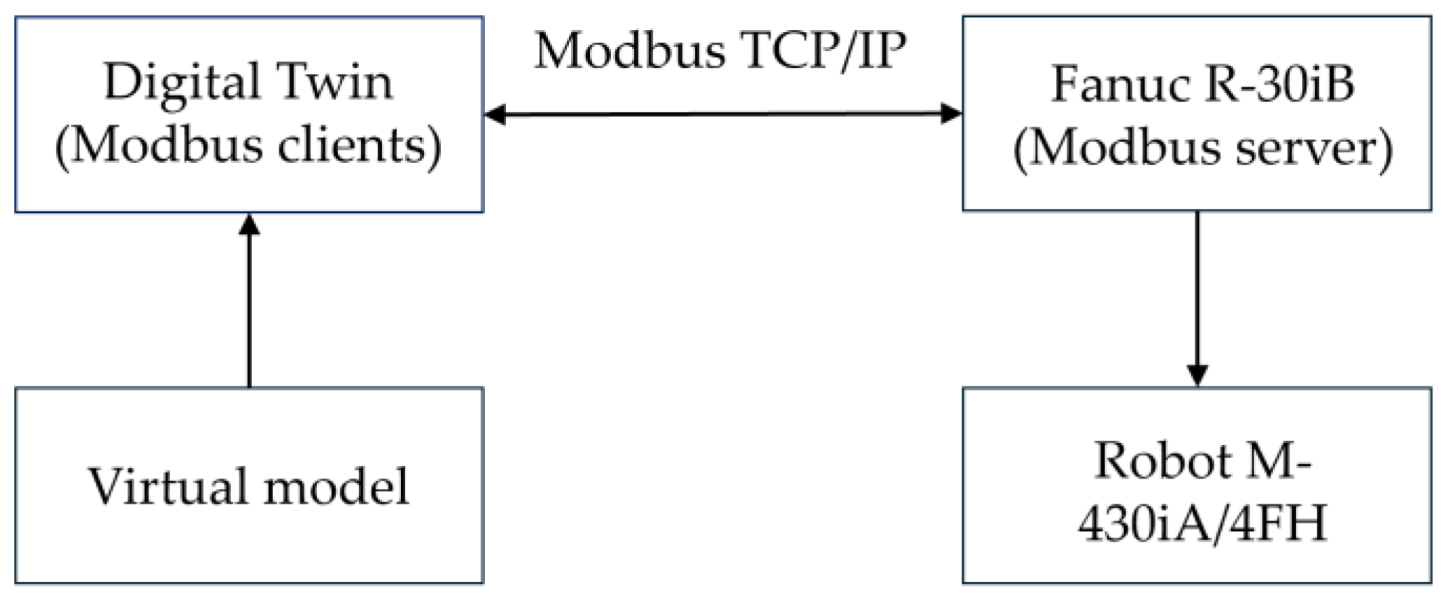
3.2. Communication Architecture between the Robot and the Digital Twin
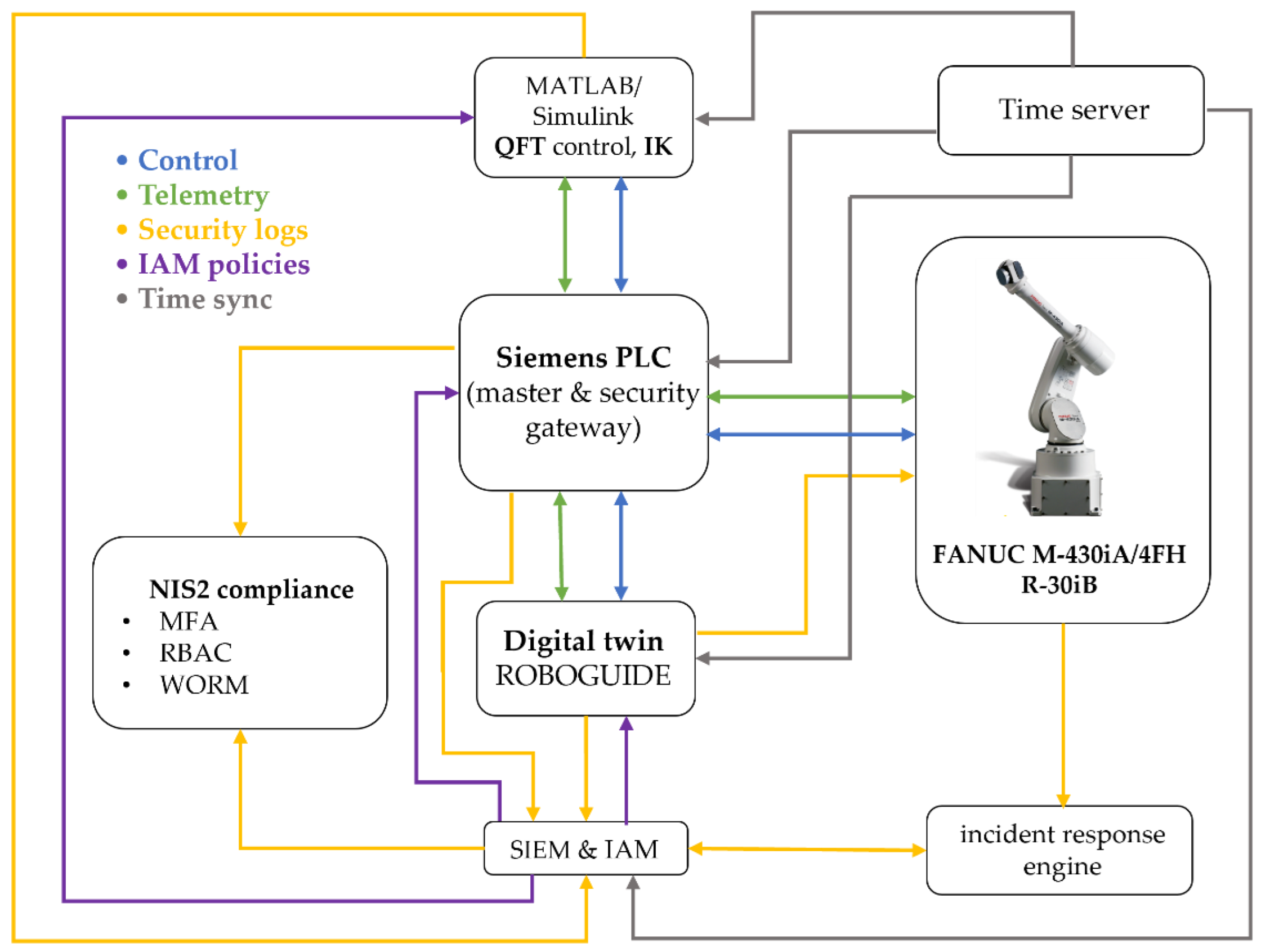
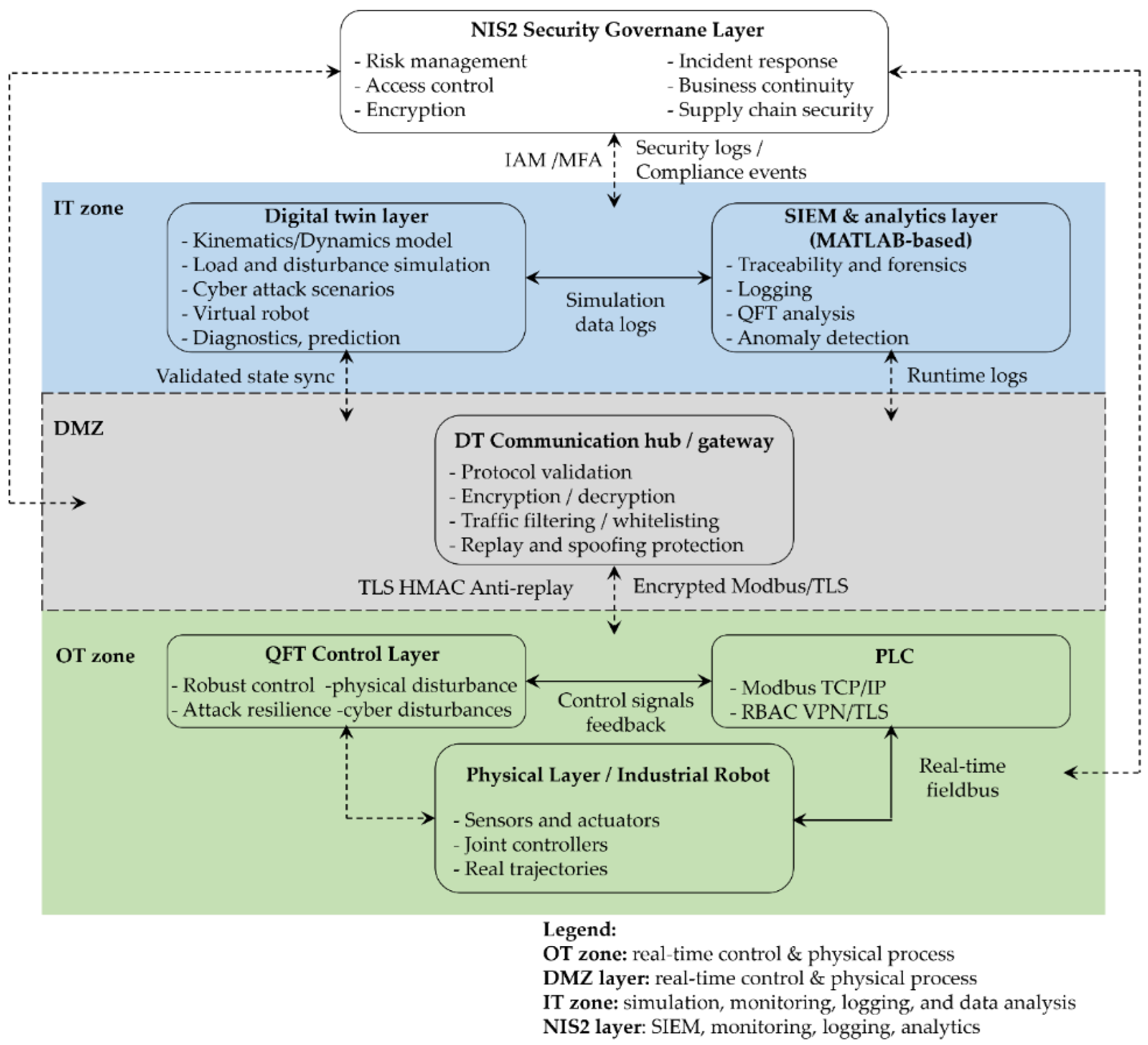
3.3. Integrated CPDTQN Architecture with Security Extensions
- Physical Layer contains the real FANUC M-430iA/4FH robot, the R-30iB controller, and the peripheral infrastructure. The robot operates in Modbus Server mode and transmits telemetry to the PLC, which in turn sends reference setpoints and diagnostic data to MATLAB and ROBOGUIDE.
- Virtual Layer, executed in ROBOGUIDE and MATLAB/Simulink, includes the digital twin, the QFT controller [35], and the additional NIS2-related services (SIEM, IAM, Incident response engine). It is logically isolated from the office IT environment in accordance with the segmentation requirements outlined in Section 5.
- Coordination Layer (PLC Gateway) synchronizes all communication channels and acts as both the master controller and a security gateway. The PLC receives QFT-based control values from MATLAB, validates them, and forwards them to the robot via Modbus TCP/IP, while telemetry from the robot is returned to the PLC and routed to the digital twin. In this way, a closed-loop system is maintained that accounts for latency, jitters, and external disturbances.
3.4. NIS2-Compliant Security, Logging and Traceability
3.5. Functional Roles of System Components
- Siemens PLC acts as the central coordination module, functioning simultaneously as the master controller and security gateway. As a controller, it exchanges control values and telemetry with the robot via Modbus TCP/IP (details in Table 1 and Table 2), supports polling cycles of 20-50 ms for motion-critical signals, and distributes information to MATLAB/Simulink and ROBOGUIDE. As a security gateway, it enforces authentication via X.509 certificates, encrypts OPC UA sessions, filters traffic via DPI, and applies RBAC/IAM policies in accordance with NIS2. Its central role in communication flow is clearly depicted in Figure 1.
- MATLAB/Simulink implements the algorithmic layer of control, performing inverse kinematics (IK), the QFT controllers for all five axes, and robustness analysis under nominal and worst-case models (as detailed in Section 4). Data exchange with the PLC is conducted through a secure OPC UA channel using the standard Simulink OPC UA Read/Write blocks. Telemetry registers from the PLC are updated every control cycle directly into the Simulink model, while the computed control values are written back into the PLC’s OPC UA address space—never bypassing the PLC gateway. This ensures that the QFT controller operates synchronously with the PLC polling cycle and maintains the NIS2-compliant system structure. Simulink also performs continuous tracking-error evaluation, RMS metrics, and disturbance sensitivity assessment, forwarding these data to the SIEM for observability and traceability. The combination of IK, QFT control, and OPC UA synchronization enables MATLAB to function as the central algorithmic node that maintains coherent real-virtual behavior between the physical robot and the digital twin.
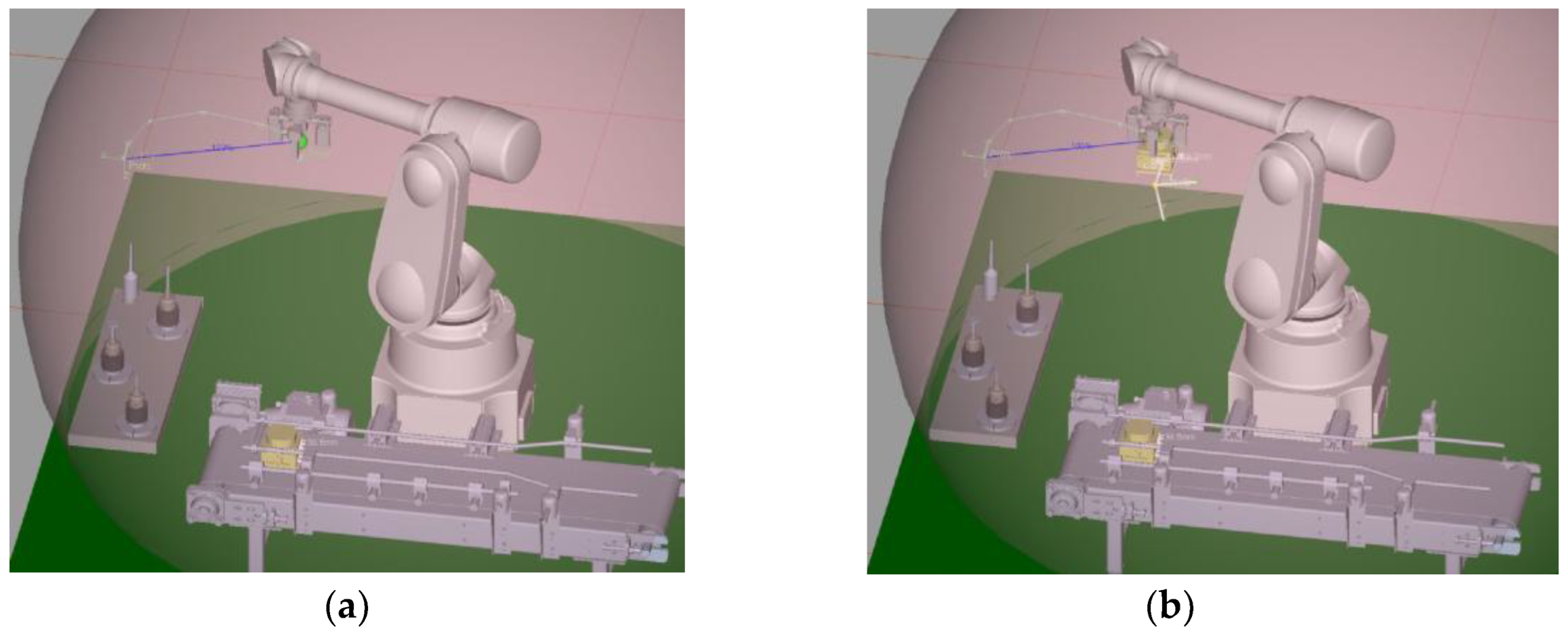
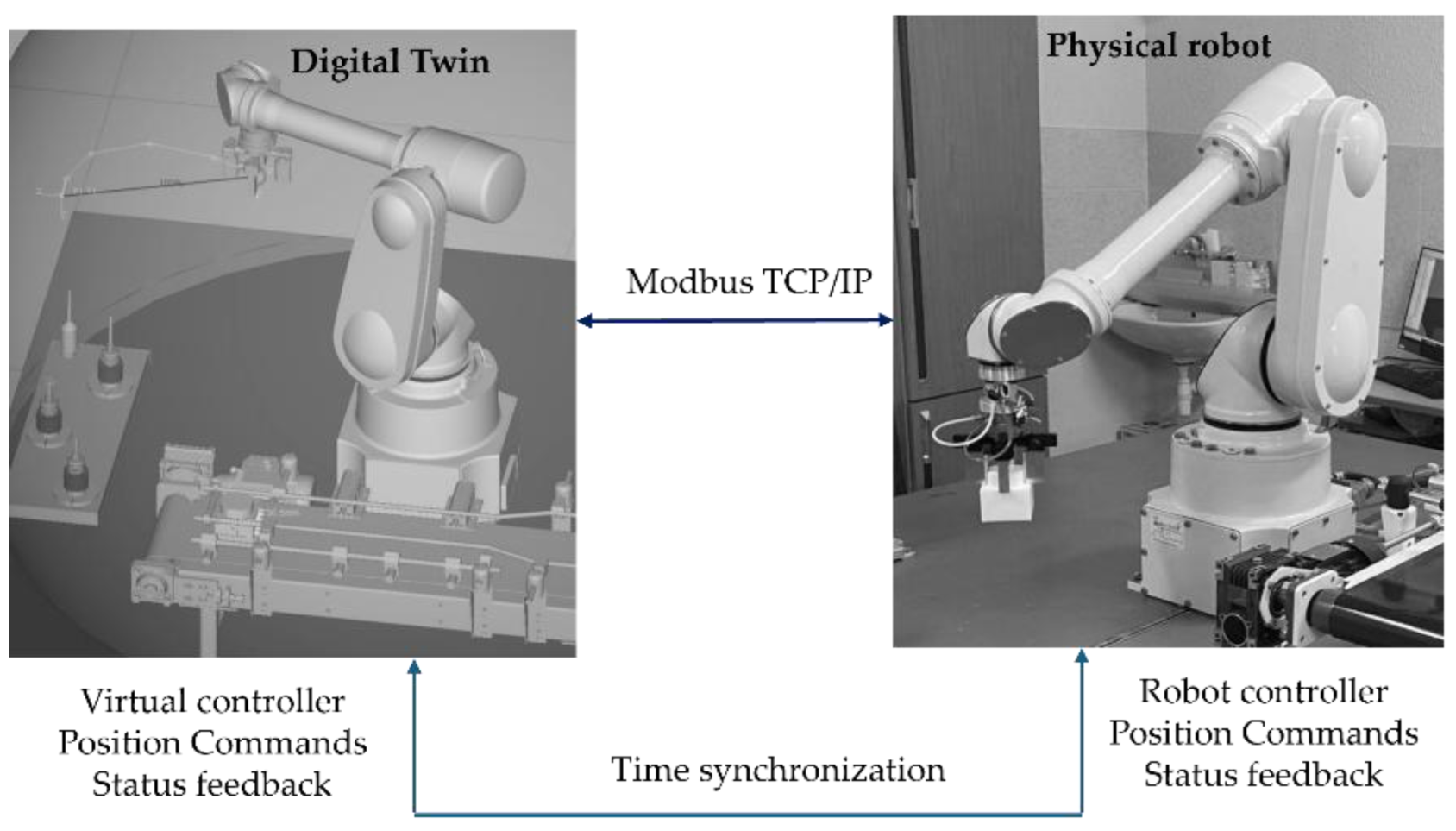
- The digital twin, implemented in ROBOGUIDE, is a high-fidelity virtual replica of the robot [34], reproducing its kinematics and dynamics in real time. It visualizes the trajectories generated by MATLAB and the PLC and enables real-virtual comparison through the synchronization concept shown in Figure 4. The digital twin performs simulation-based diagnostics, detects collisions, workspace limitations, and TCP anomalies, and exchanges structured data with the PLC via OPC UA (Table 3). It serves as a reference model that provides NIS2-aligned traceability and allows verification of commands prior to physical execution.
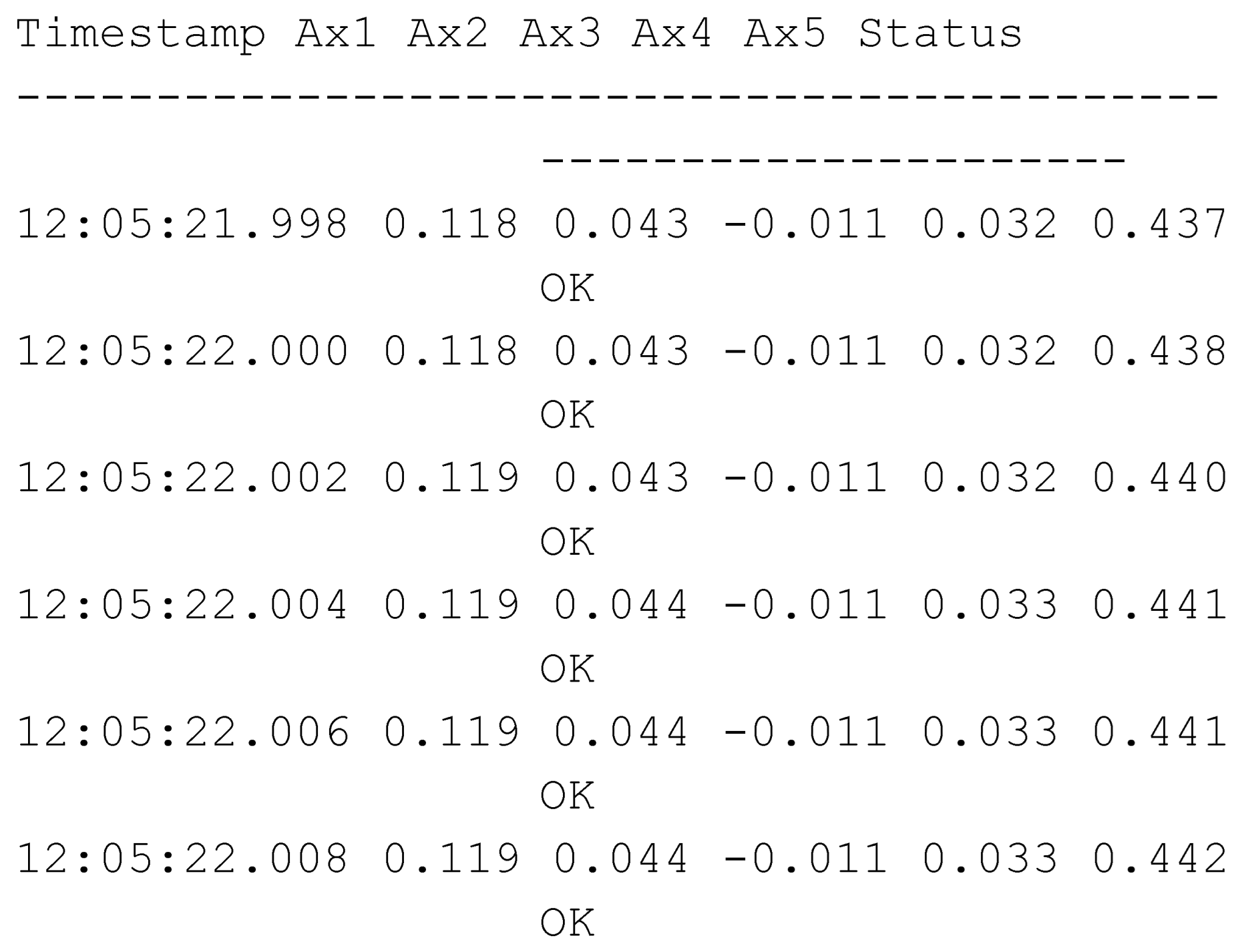
- The physical robot FANUC M-430iA/4FH and the R-30iB controller execute the control commands generated by the algorithmic layer and transmit telemetry to the PLC, including joint positions, alarms, logical states, and diagnostic parameters (see Table 2). The robot operates as a Modbus TCP server and uses NTP/PTP synchronization to maintain a unified time base with the virtual model, supporting accurate real-virtual motion analysis as shown in Figure 4.
- The SIEM system aggregates Syslog/TLS events from the PLC, MATLAB, ROBOGUIDE, and IAM, correlates them using synchronized timestamps, and analyzes deviations such as malformed command frames, CRC errors, nonstandard Modbus packets, or motion anomalies. This fulfills NIS2 requirements for monitoring, accountability, and incident-data retention and is a key element in the communication scheme shown in Figure 1.
- The incident response engine uses SIEM alerts to trigger automated actions such as terminating active sessions, restricting control commands, isolating communication channels, or activating safety modes (freeze motion or safe stop). It records all actions in a WORM log, supporting forensic analysis and ensuring operational resilience under disturbances or cyber events.
- The time server provides a unified time base for the PLC, MATLAB, ROBOGUIDE, SIEM, and the incident response engine via NTP for system time and PTP for precision synchronization. This minimizes phase offsets in real-virtual comparisons, ensures consistent timestamping (critical for NIS2 traceability), and enables correction of communication delays during the tracking analyses in Section 6.
4. Control of the Multi-Axis Manipulator
4.1. Motivation for the QFT Approach
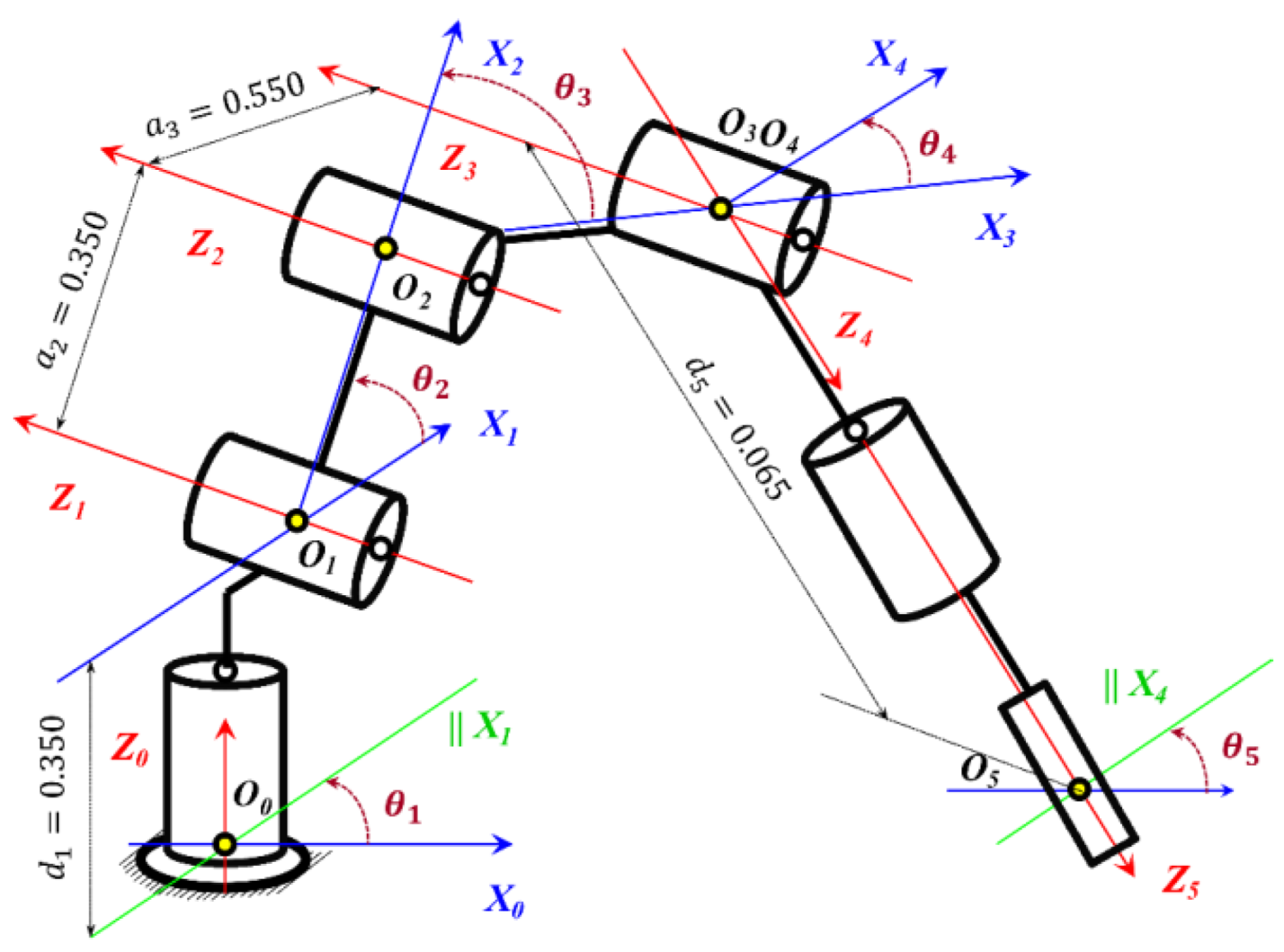
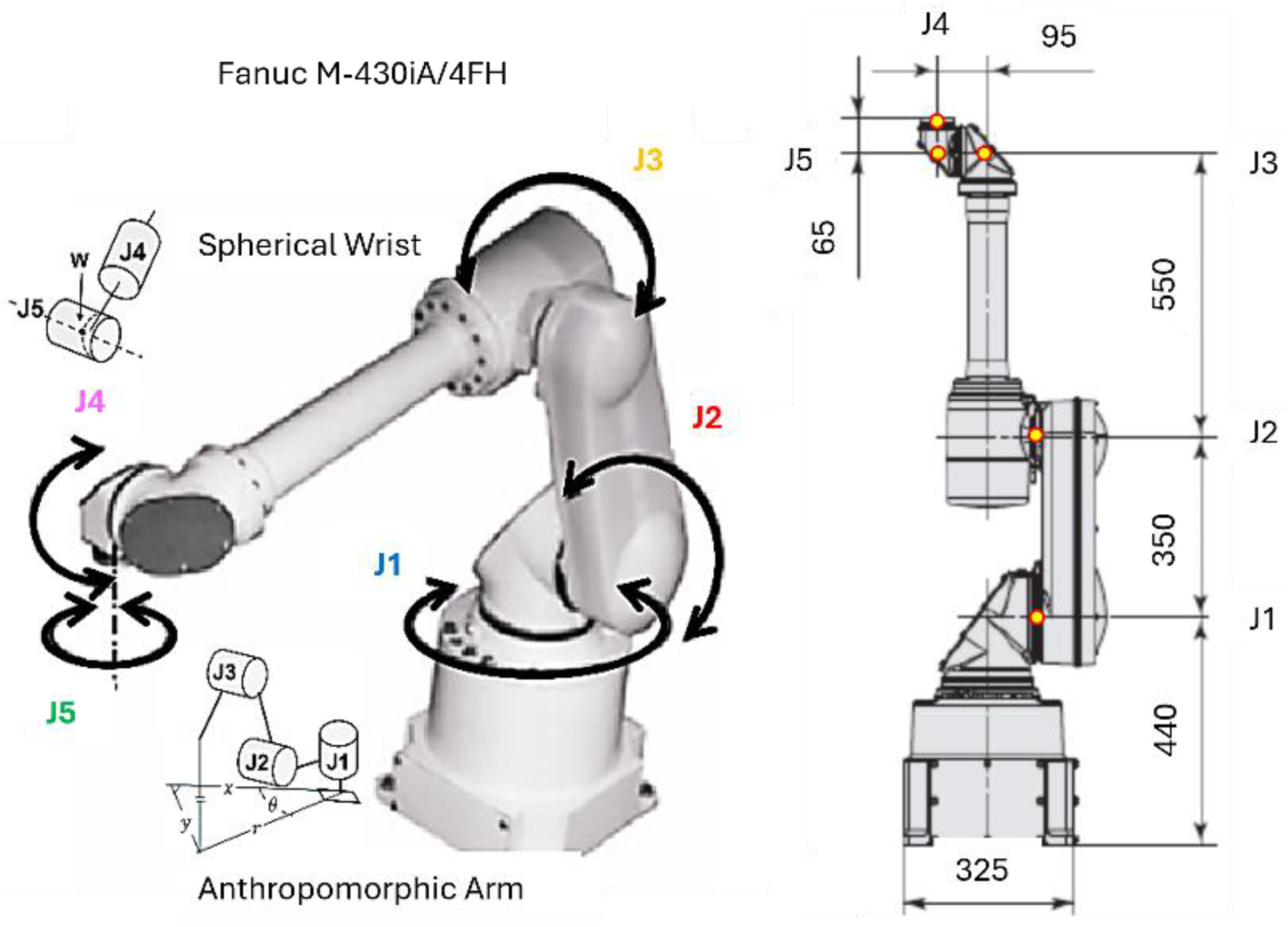
4.2. Hierarchical Architecture, Forward and Inverse Kinematics [3]
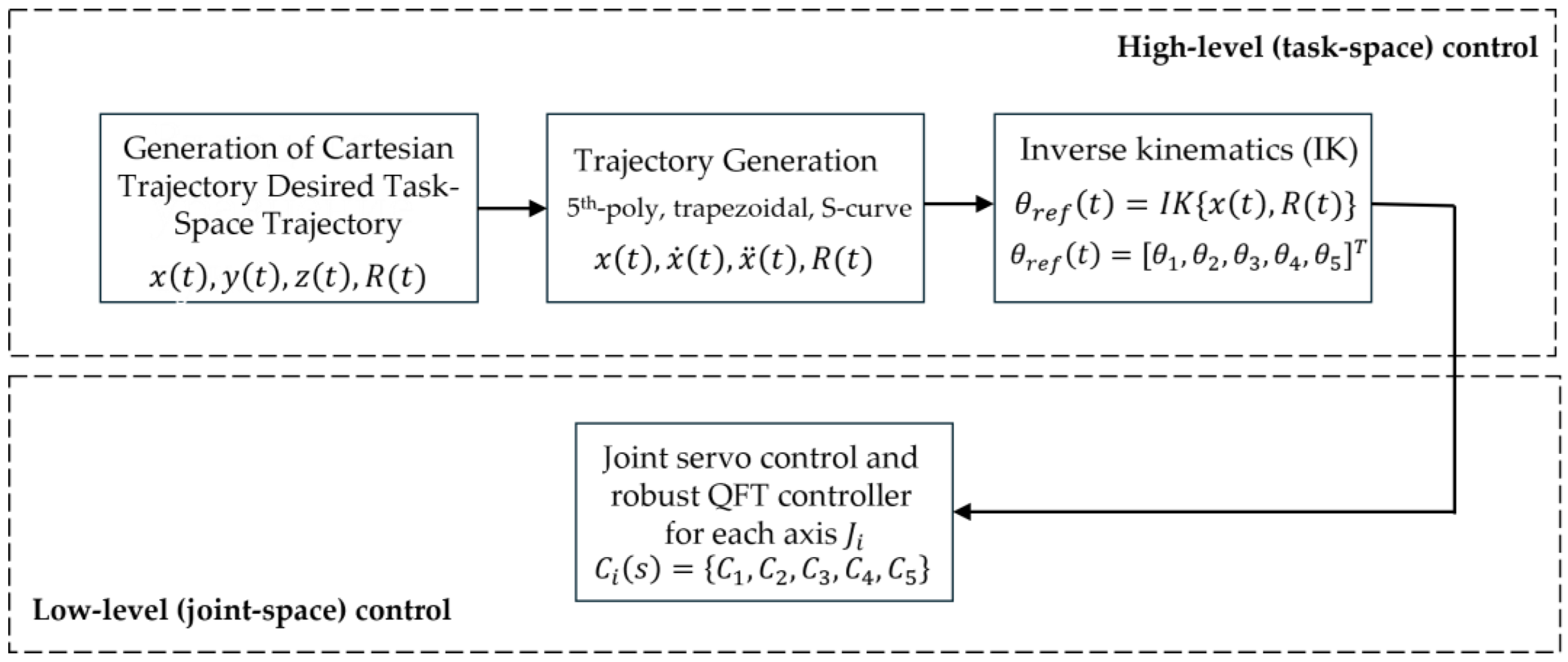
4.3. Trajectory Generation in the Task Space [1,11]
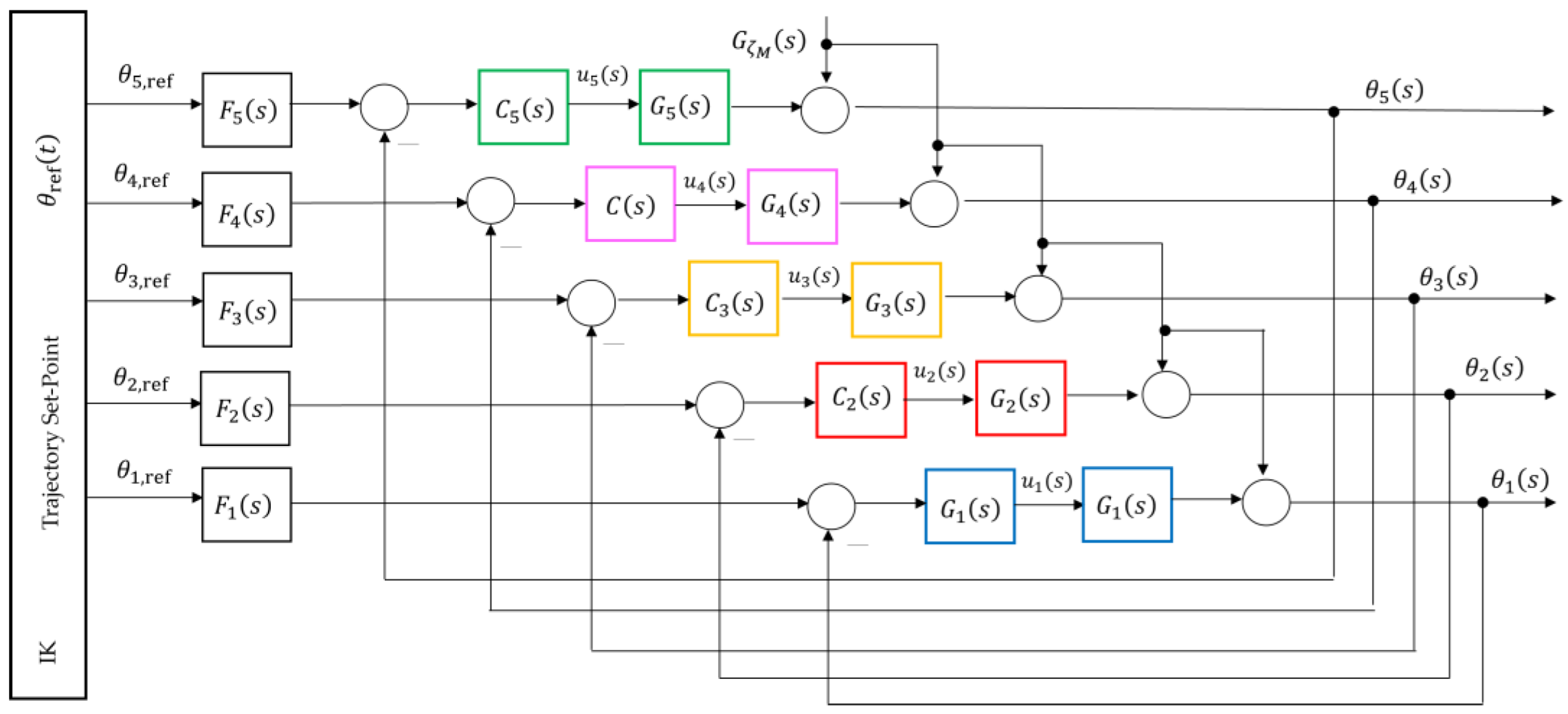
Decoupling of the Multi-Axis Dynamics
4.5. Modeling of the Individual Axes
4.5.1. Modeling Assumptions and Axis Dynamics
4.5.2. Modeling of Disturbance Influence
4.5.3. Modeling of Parametric Variations and Worst-Case Dynamics
4.6. QFT Algorithm Overview [8,9,10]
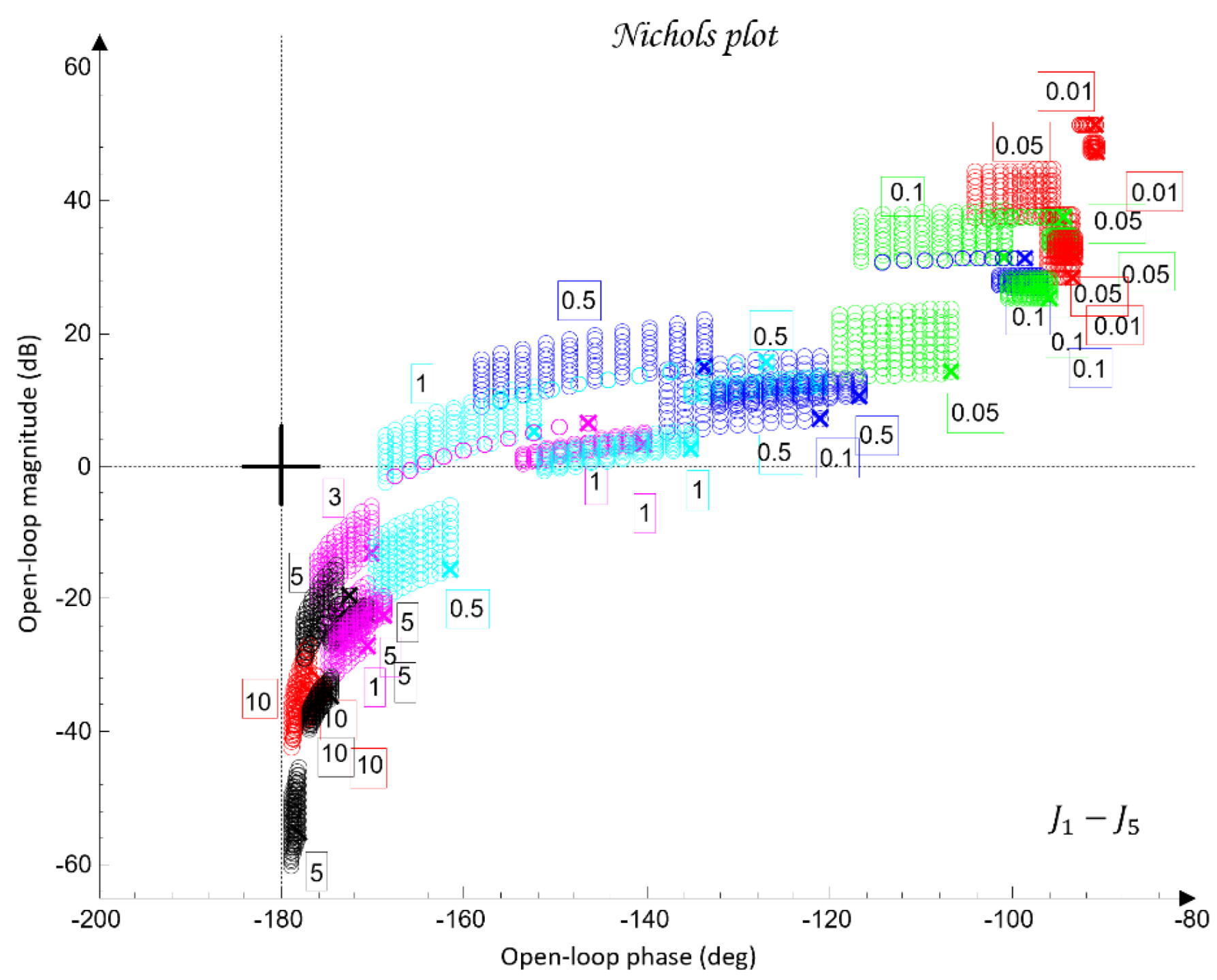
- Plant modeling. The nominal (31) and perturbed (32) models from Table 4 are selected. These models are used to construct the QFT plant templates in the Nichols plane.
- Template construction. For selected frequencies, referred to as essential frequencies , the magnitude–phase characteristics of all admissible variants of the plant dynamics are computed. The resulting envelopes form the plant templates, which represent parametric uncertainty.
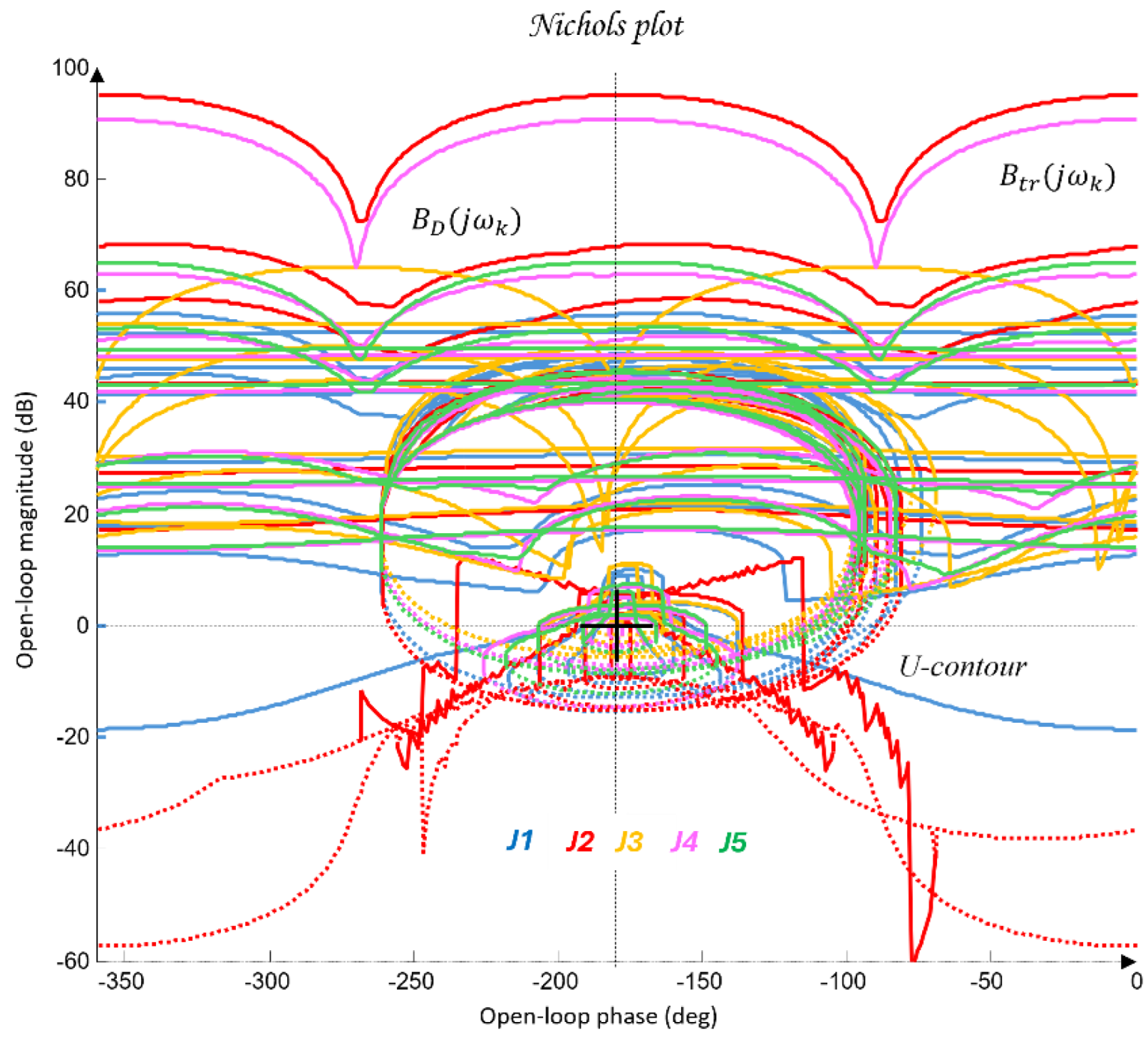
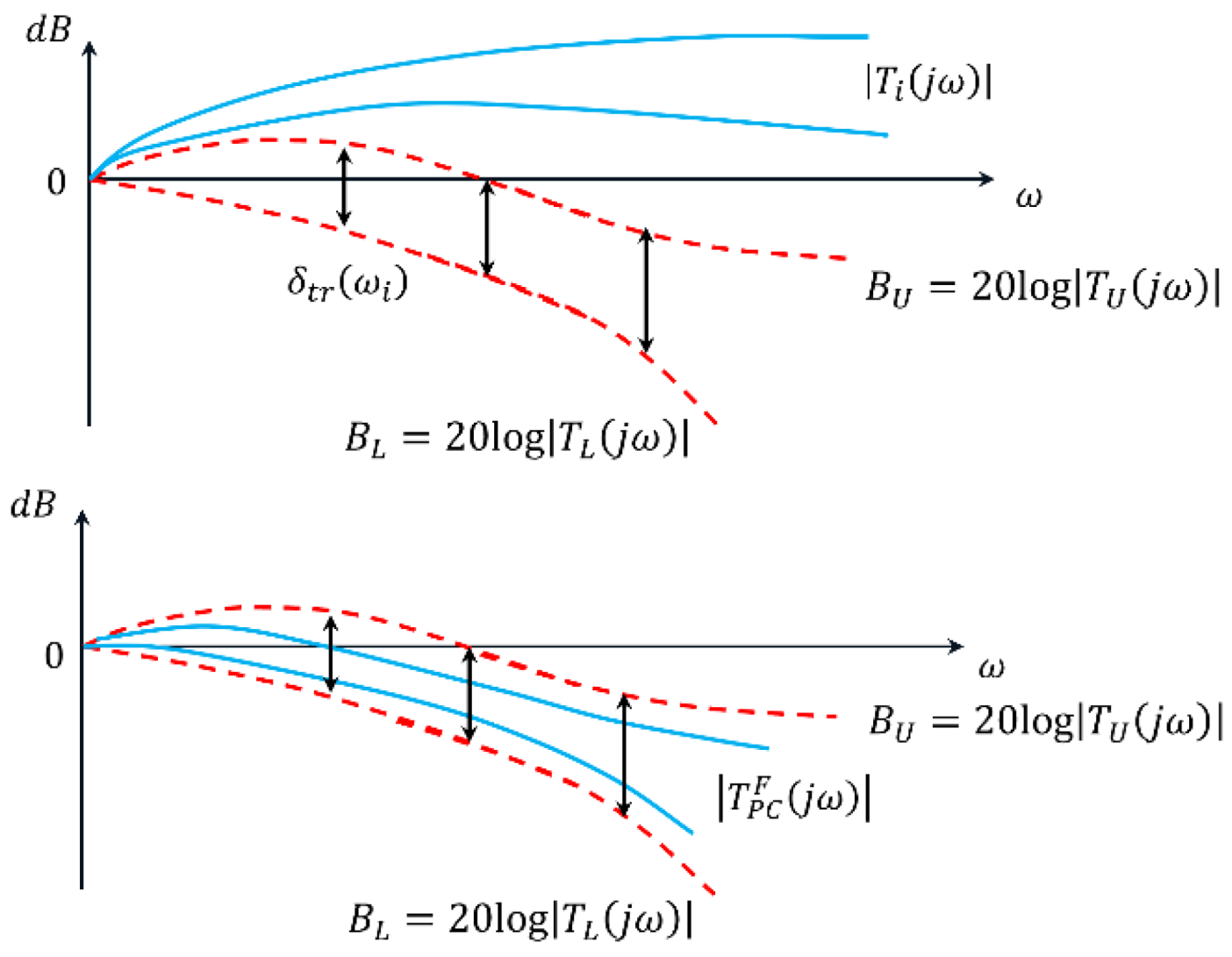
- Bounds specification. Robust performance bounds are defined: tracking bounds , ensuring low sensitivity at low frequencies; disturbance-rejection bounds , derived from the disturbance model ; a universal high-frequency bound (the U-contour), which specifies a region that the frequency response of the designed open-loop system must not enter. Together these constraints define the optimal bounds , which the QFT controller must satisfy.
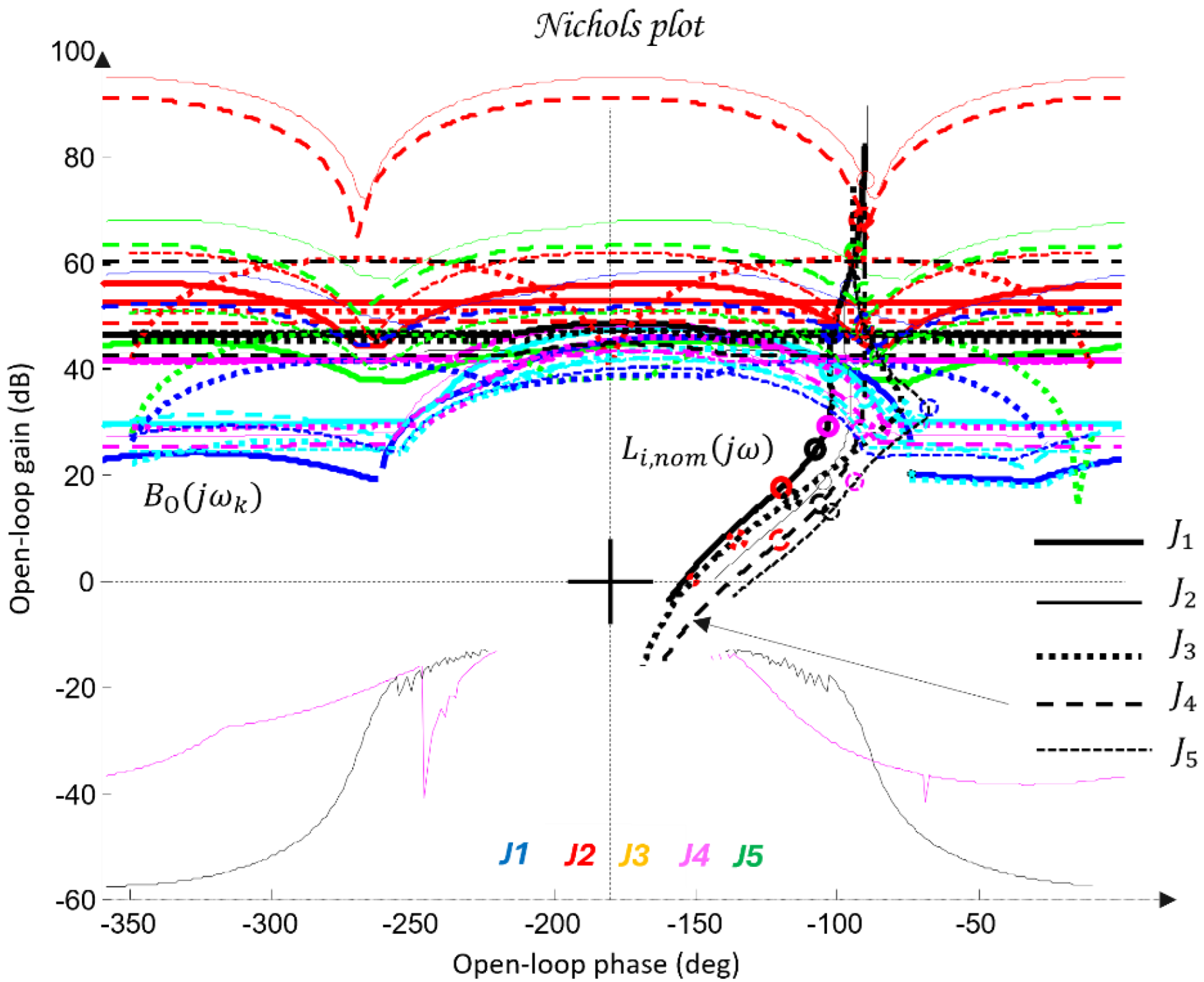
- Loop shaping. In the Nichols plane, the frequency response of the optimal open-loop system is shaped so that it satisfies all templates and bounds based on the nominal plant model and the optimal limits .
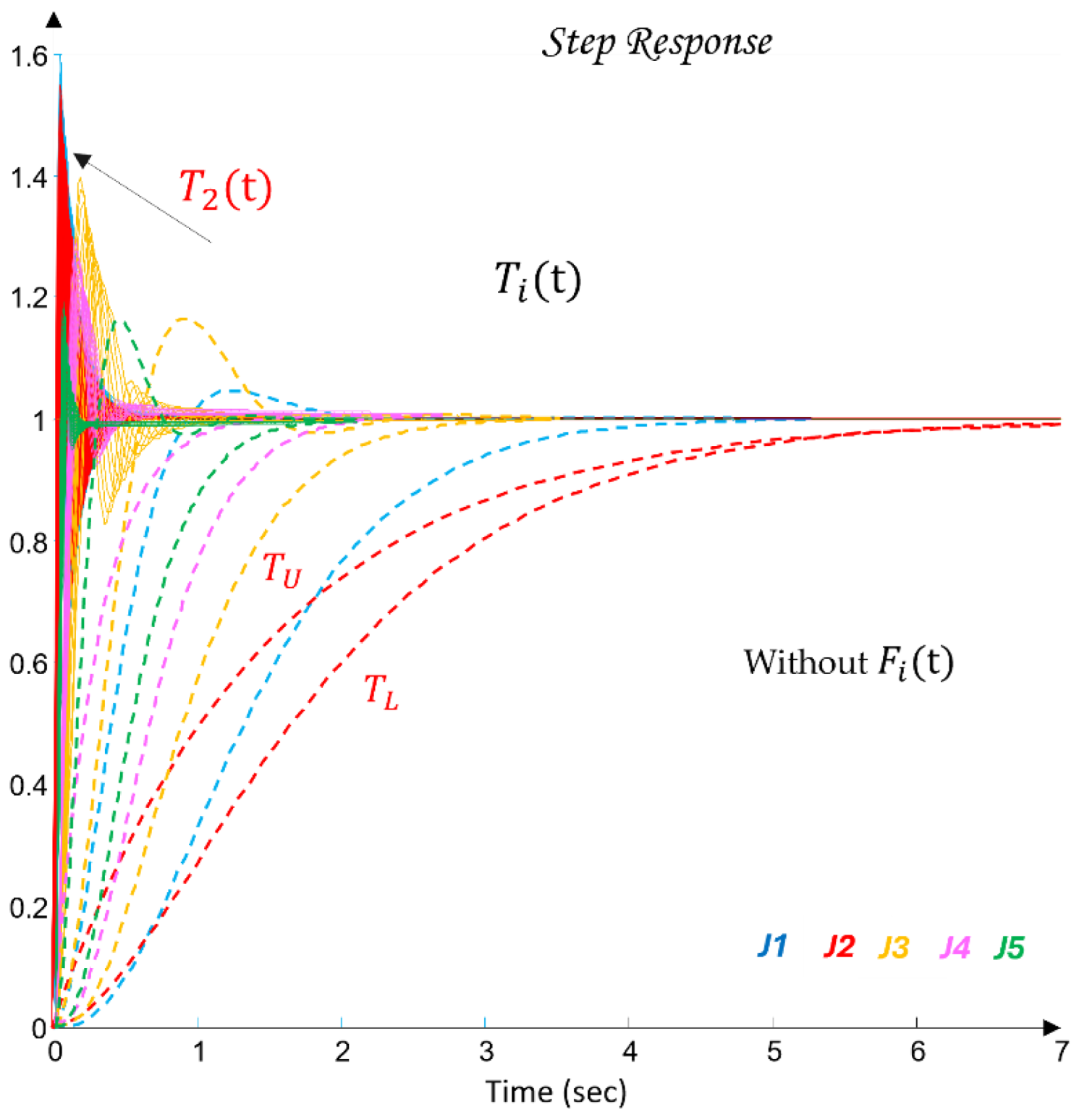
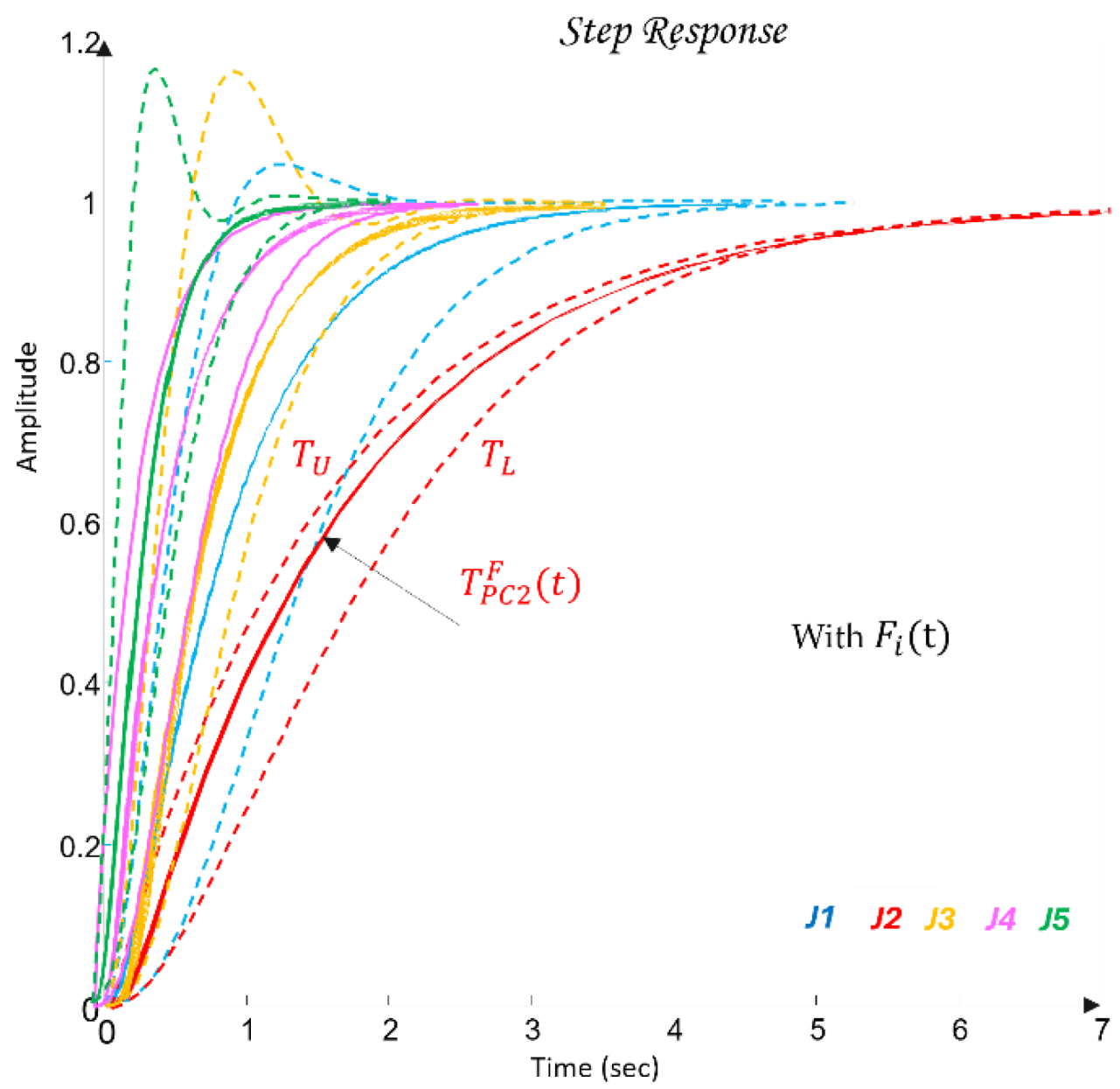
- Prefilter design. The prefilter is used to refine the transient response and limit its aggressiveness. Its purpose is to shape the closed-loop frequency response so that the resulting time-domain behaviors specifically the joint trajectories and their settling characteristics meets the required performance criteria.
- Verification. Closed-loop stability and performance are verified for all admissible plant variations and under the influence of the disturbance channel .
| - Base rotation: | |||
| - Shoulder motion: | |||
| - Elbow joint: | |||
| - Wrist rotation (yaw): | |||
| - Wrist rotation (pitch/roll): |
Controller Synthesis and Validation
4.7. Discrete-Time Realization of the QFT Controllers and Prefilters
5. Digital Twin Integration and NIS2 Security Compliance
5.1. PLC Communication with the Digital Twin (Modbus TCP/IP)
5.2. Simulated Disturbances and Loads in the Digital Twin
5.3. Cybersecure Communication in Compliance with NIS2
5.4. MATLAB-Based Logging and Monitoring for Traceability
5.5. CPDTQN Architecture with NIS2 Security Layers
6. Results
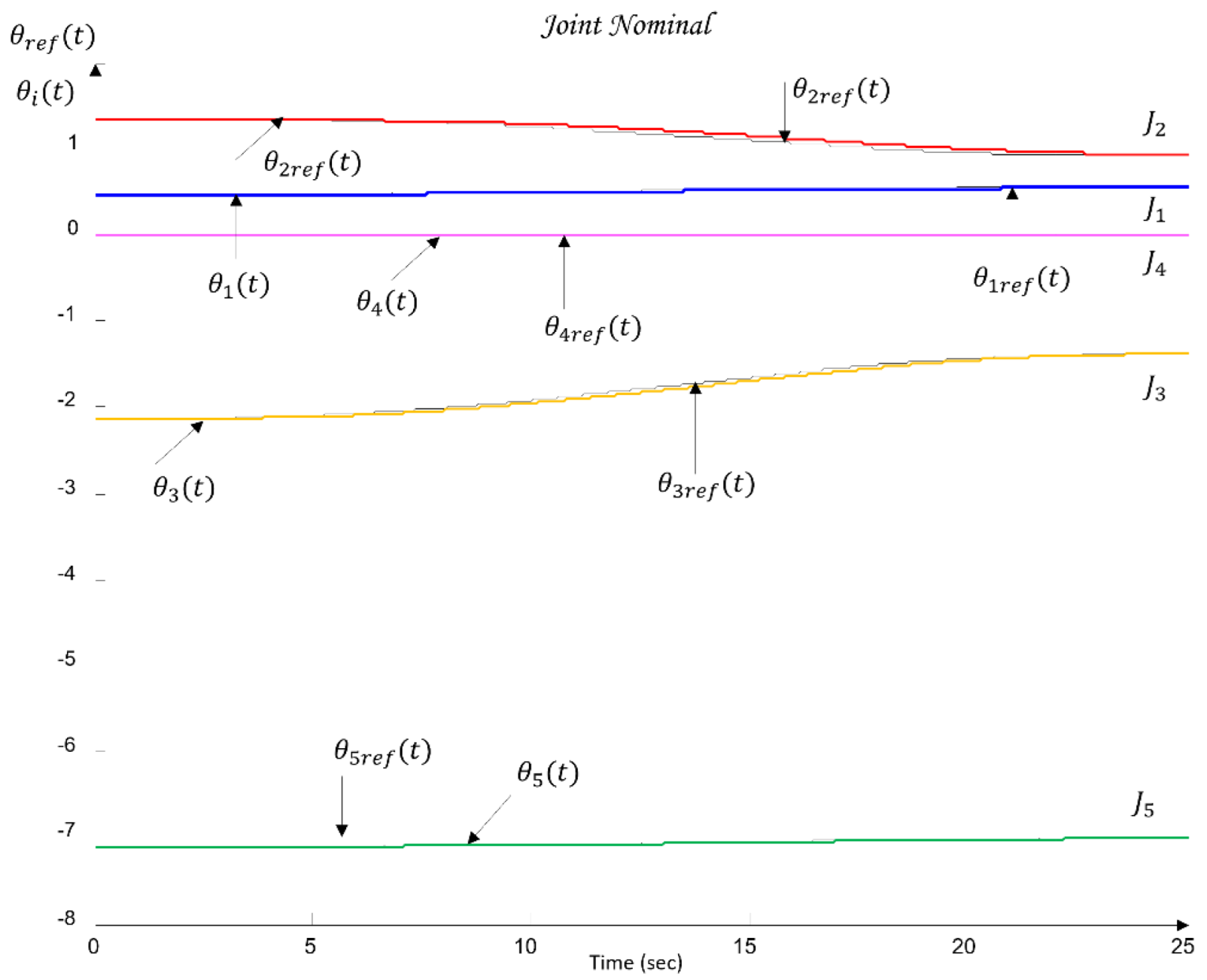
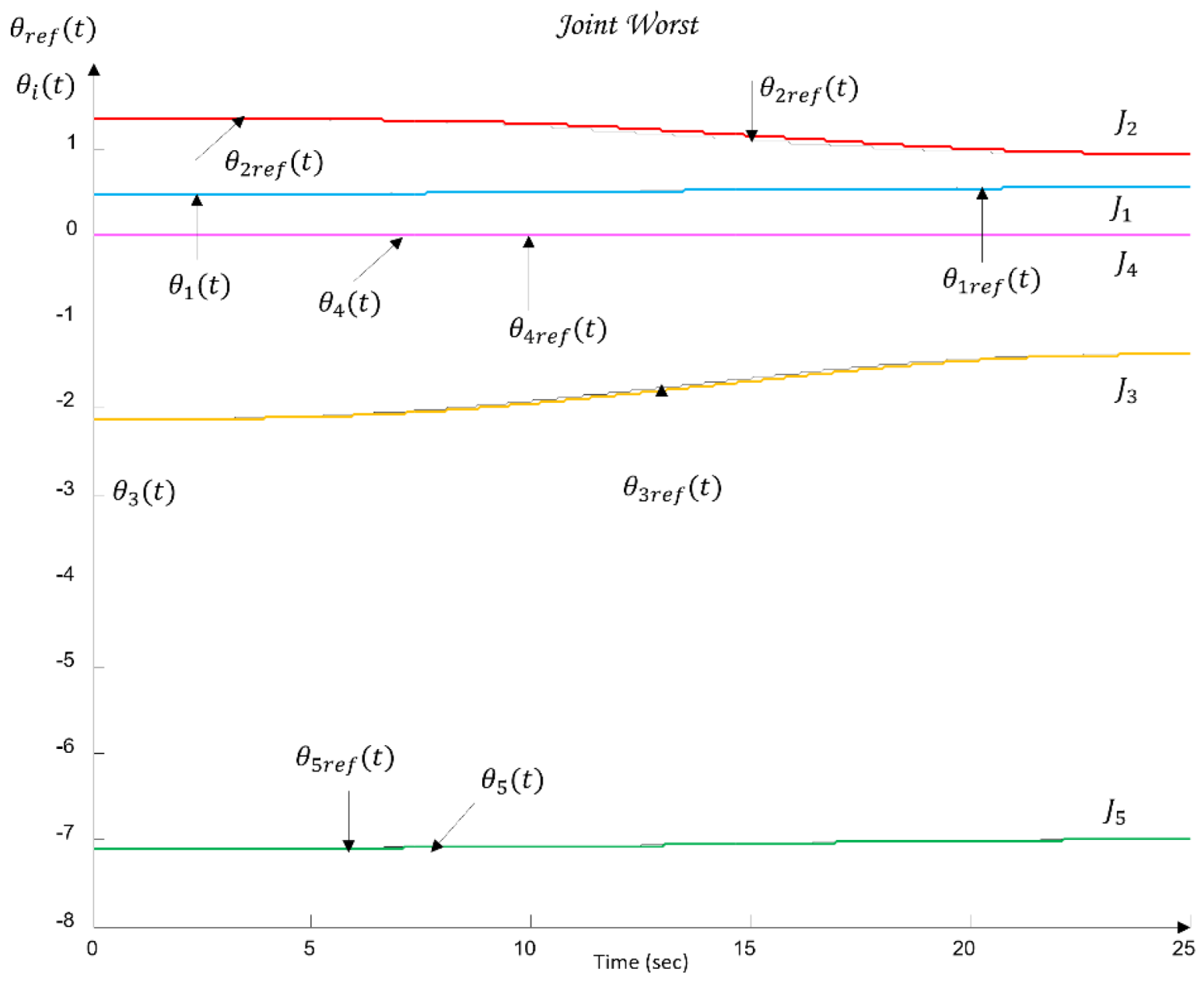
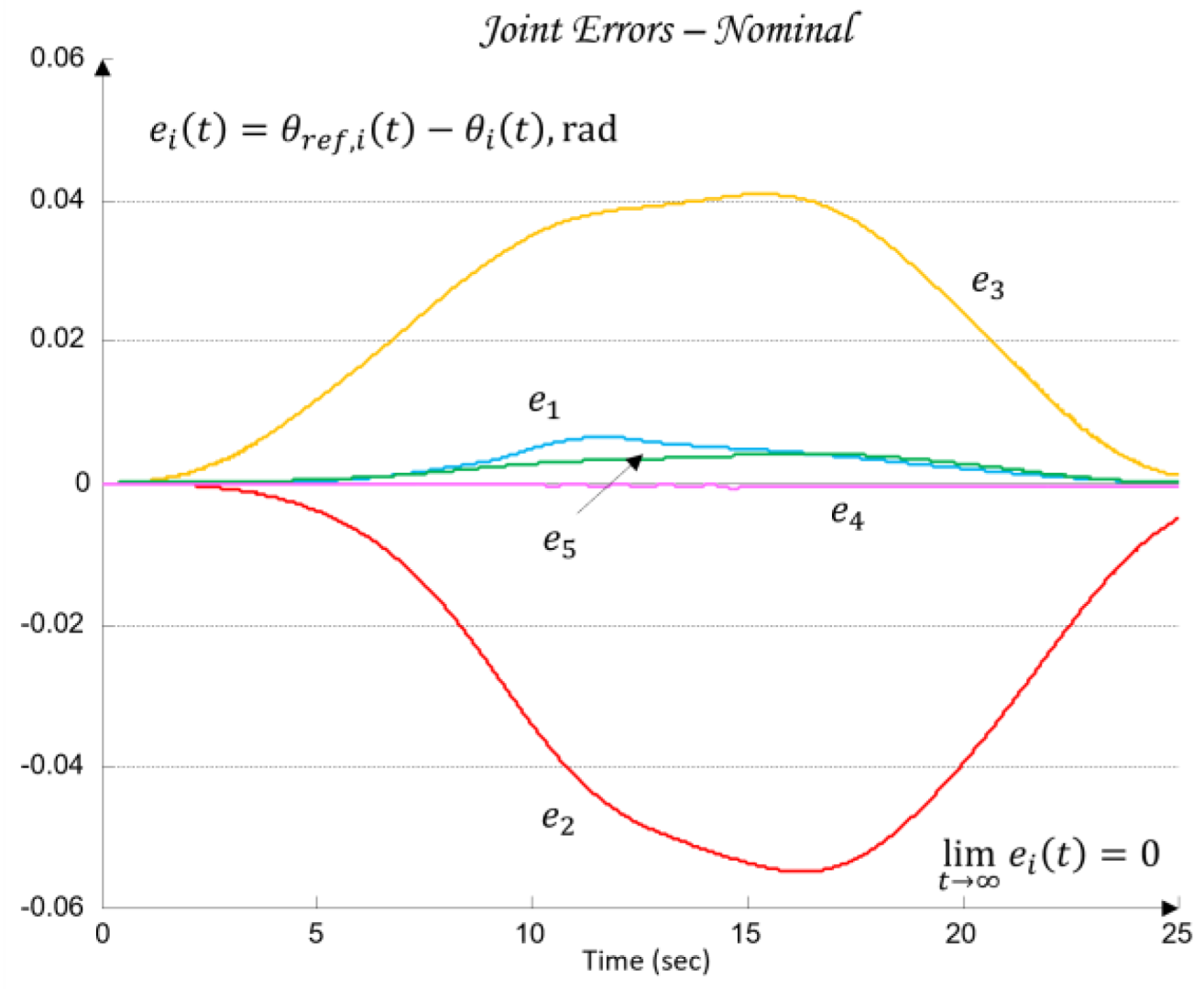
6.1. Joint-Space Simulation and QFT Controller Tracking Performance
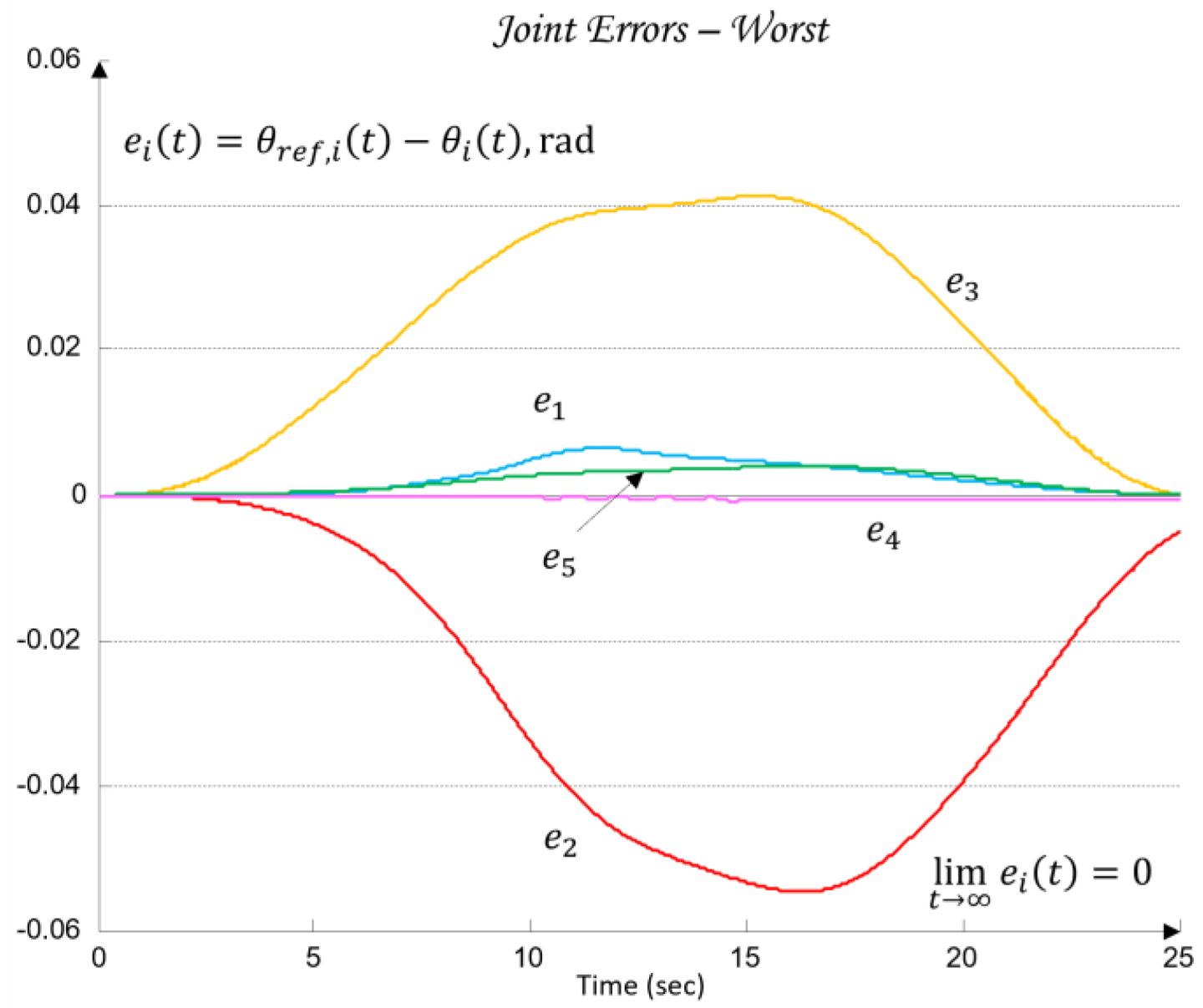

| Joint | Condition | Max Error [rad] | RMS Error [rad] | SS Error [rad] |
|---|---|---|---|---|
| J1 - Base | Nominal | 0.006450 | 0.003218 | 0.000075 |
| Worst-Case | 0.006428 | 0.003204 | 0.000072 | |
| J2 - Shoulder | Nominal | 0.055030 | 0.033797 | -0.005240 |
| Worst-Case | 0.054680 | 0.033581 | -0.005171 | |
| J3 - Elbow | Nominal | 0.040831 | 0.026744 | 0.001053 |
| Worst-Case | 0.041192 | 0.027030 | 0.000119 | |
| J4 - Wrist Pitch | Nominal | 0.004095 | 0.002459 | 0.000040 |
| Worst-Case | 0.004052 | 0.002432 | 0.000022 | |
| J5 - Wrist Roll | Nominal | 0.000738 | 0.000343 | -0.000430 |
| Worst-Case | 0.000741 | 0.000343 | -0.000430 |
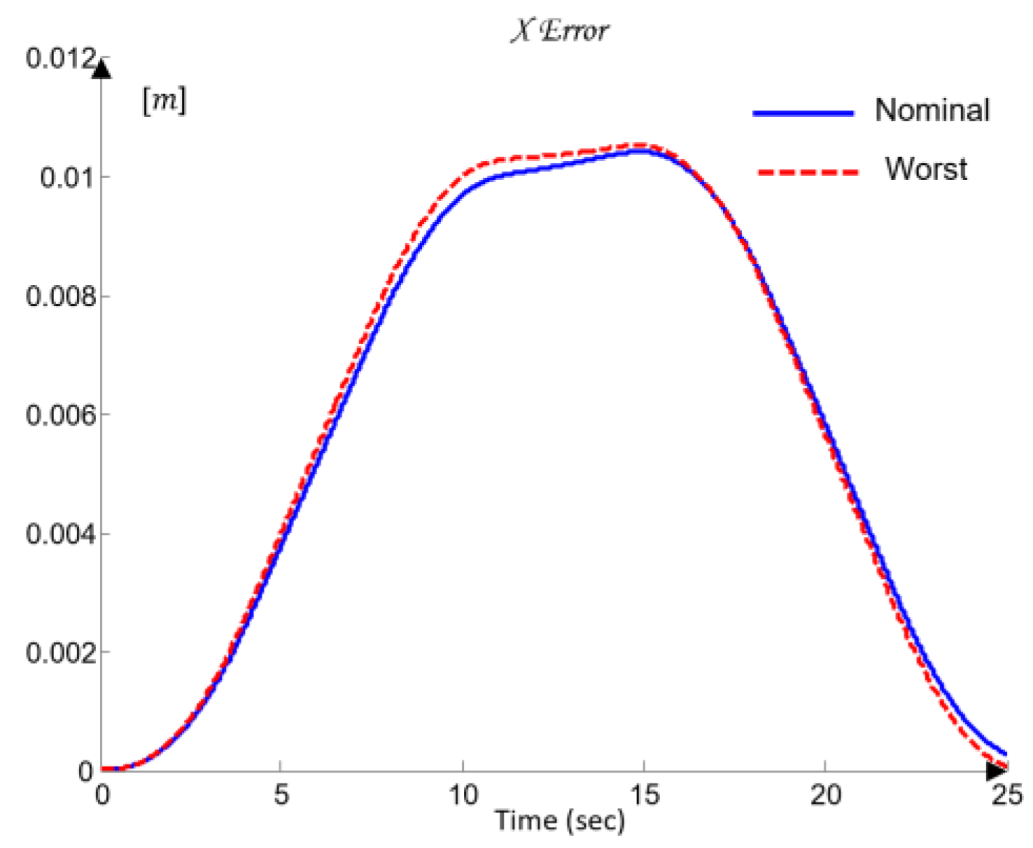
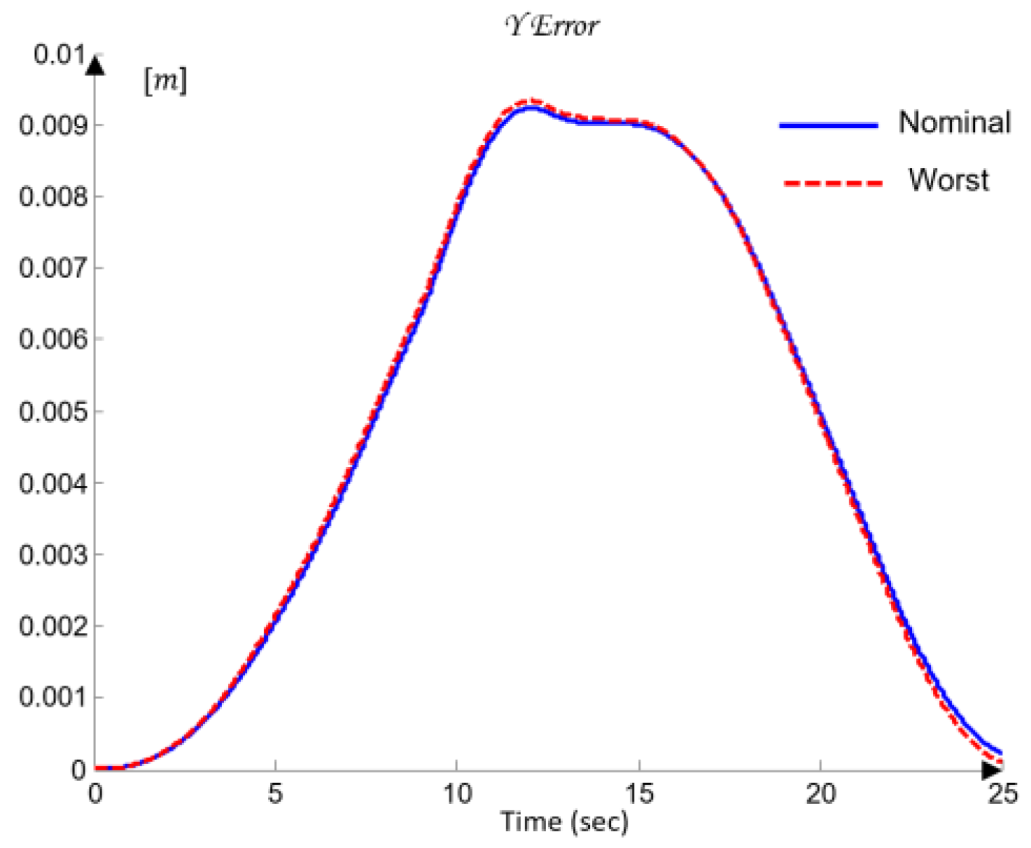
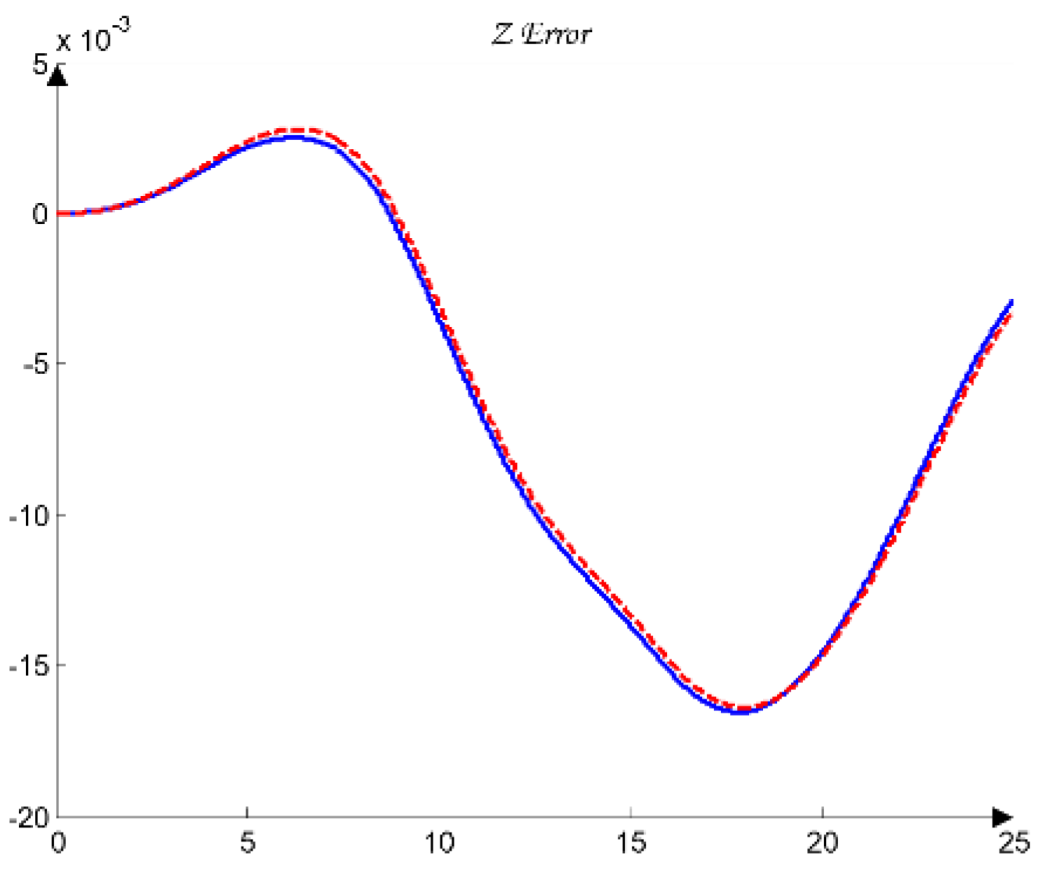
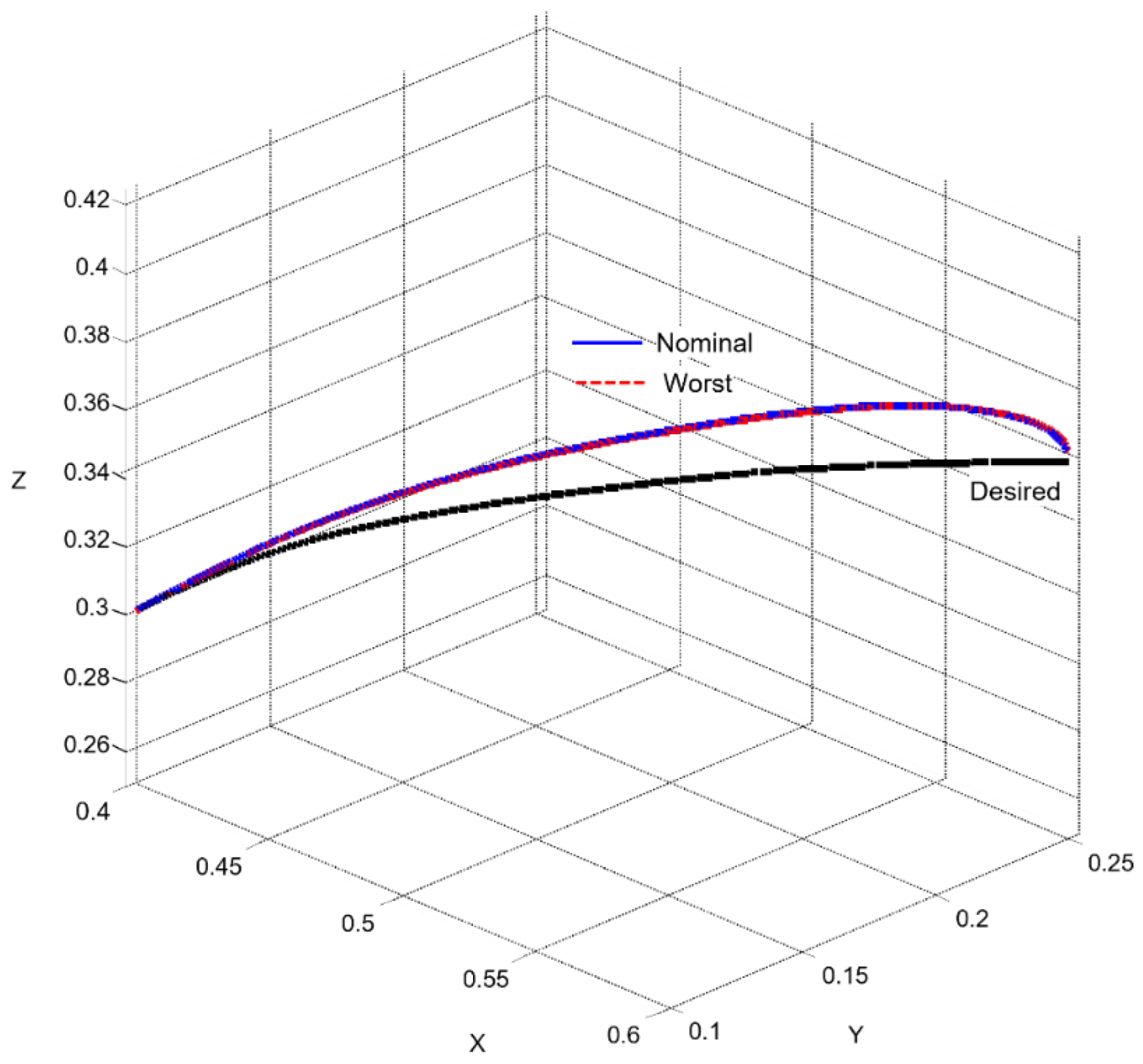
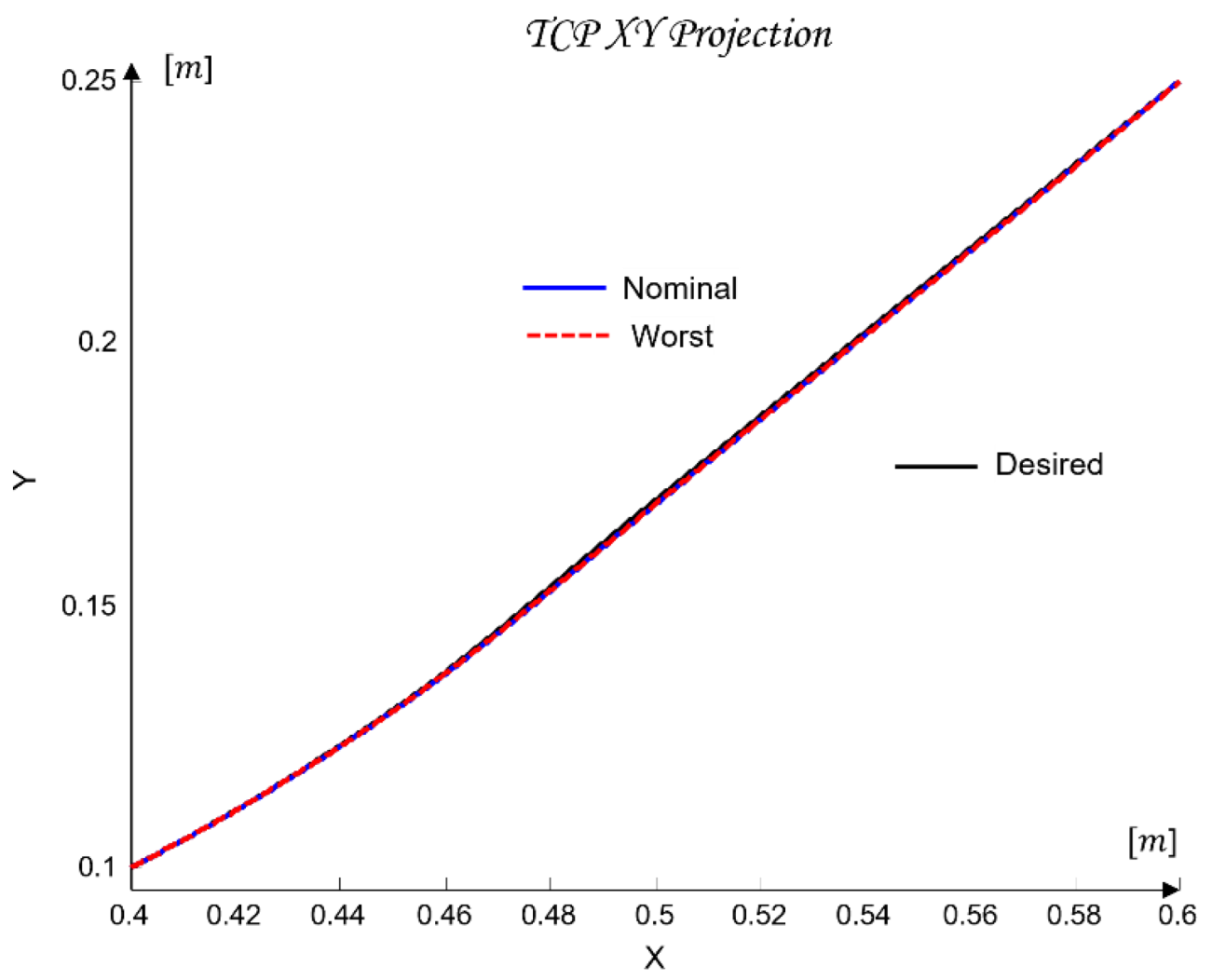
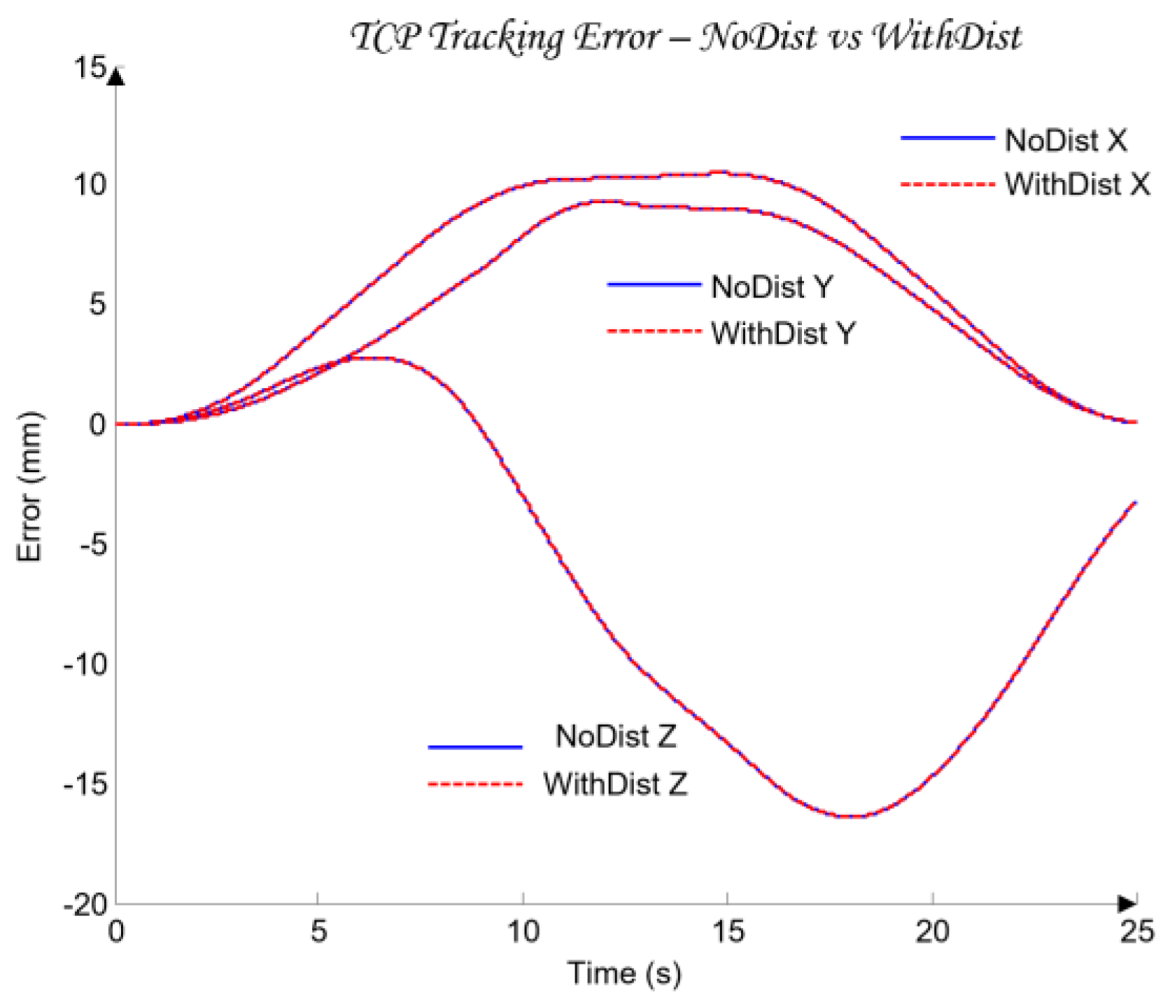
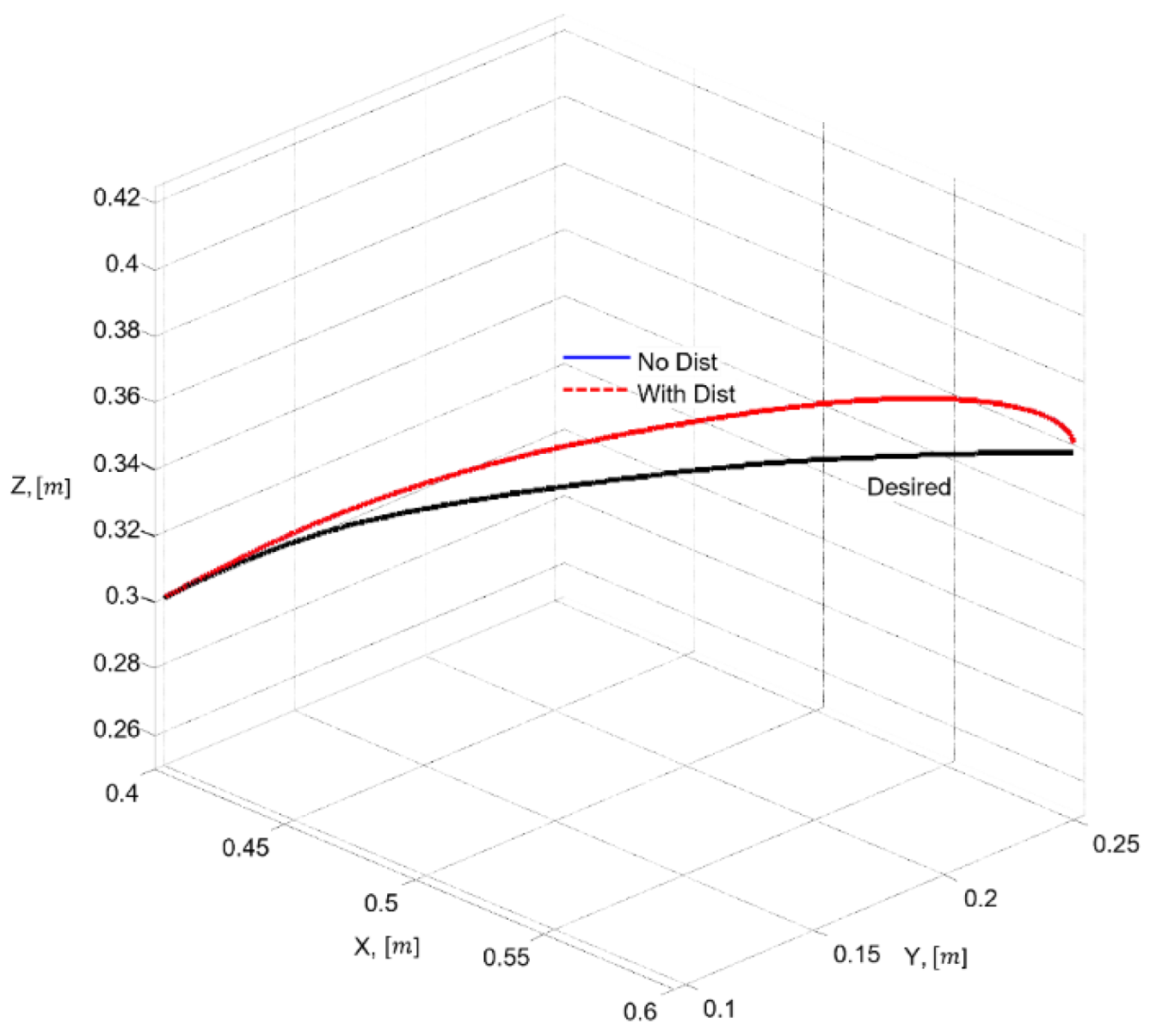
6.2. Cartesian Tracking Performance
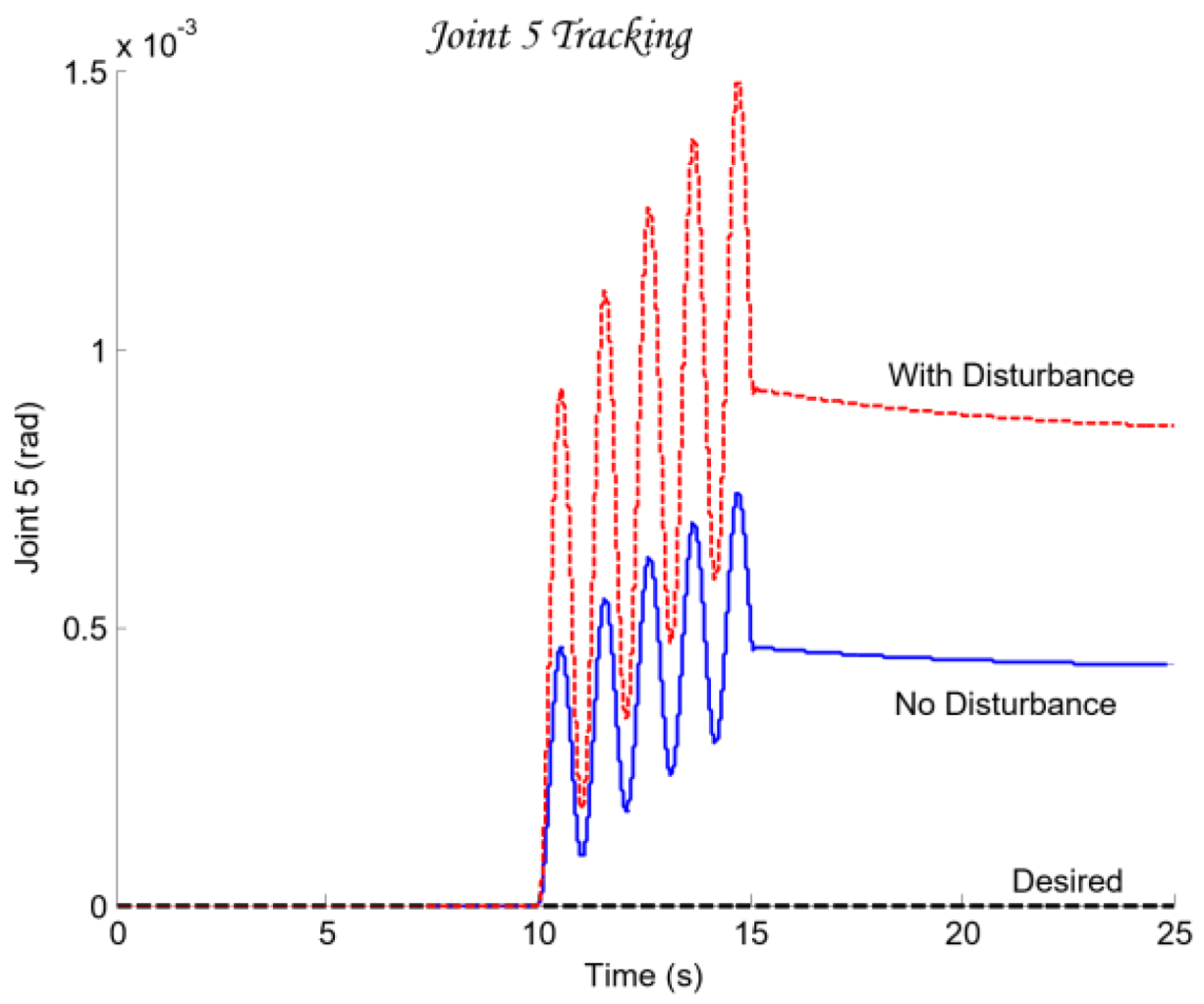
6.3. Disturbance Rejection on the Wrist Joint (Axis 5)
| Condition | Max Error [rad] | RMS Error [rad] |
|---|---|---|
| No Disturbance | 0.000741 | 0.000343 |
| With Disturbance | 0.001482 | 0.000686 |
6.4. Digital Twin Validation Through PLC–MATLAB–ROBOGUIDE Integration
| Metric | ROBOGUIDE | MATLAB | Difference |
|---|---|---|---|
| RMS TCP tracking error (mm) | 0.47 | 0.42 | +0.05 |
| Max TCP deviation (mm) | 2.1 | 1.8 | +0.3 |
| Joint-space RMS error (rad) | 0.00102 | 0.00095 | +7×10⁻⁵ |
| Max joint deviation (rad) | 0.0033 | 0.0031 | +0.0002 |
| Command packets lost | 0 | 0 | - |
| PLC scan-cycle delay | 42 ms | - | - |
| Execution time (s) | 25.04 | 25.00 | +0.04 |
| Metric | MATLAB (Dist) | ROBOGUIDE (Dist) | Difference |
|---|---|---|---|
| RMS TCP tracking error (mm) | 0.55 | 0.62 | +0.07 |
| Max TCP deviation (mm) | 2.5 | 2.7 | +0.2 |
| Joint-space RMS error (rad) | 0.0013 | 0.0014 | +1×10⁻⁴ |
| Max joint deviation (rad) | 0.0042 | 0.0045 | +0.0003 |
| Command packets lost | 0 | 0 | - |
| PLC scan-cycle delay | - | 42 ms | - |
| Execution time (s) | 25.1 | 25.2 | +0.1 |
6.5. NIS2-Oriented Cyber-Resilience Observations
7. Discussion
- robustness to parametric uncertainty (27),
- compliance with accuracy criteria in joint and TCP space (29), (39), (40),
- effective disturbance rejection (30),
- minimal impact of cybersecurity mechanisms on dynamics,
- full NIS2 compliance for logging, traceability, and resilience,
- consistency between simulation and twin execution even under worst-case conditions.
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| PLC | Programmable logic controller |
| QFT | Quantitative Feedback Theory |
| DT | Digital Twin |
| CPDTQN | Cyber-Physical Digital Twin with QFT & NIS2 Security |
| TCP | Tool Center Point |
| TCP/IP | Transmission Control Protocol / Internet Protocol |
| OPC UA | Open Platform Communications Unified Architecture |
| PTP | Precision Time Protocol |
| NTP | Network Time Protocol |
| OT | Operational Technology |
| IT | Information Technology |
| ICS | Industrial Control System |
| LQR | Linear Quadratic Regulator |
| SIEM | Security Information and Event Management |
| IAM | Identity and Access Management |
| RBAC | Role-Based Access Control |
| MFA | Multi-Factor Authentication |
| WORM | Write Once, Read Many |
| IK | Inverse Kinematics |
| TLS | Transport Layer Security |
| DPI | Deep Packet Inspection |
| VLAN | Virtual Local Area Network |
| SISO | Single Input, Single Output |
| MIMO | Multiple Input, Multiple Output |
| RMS | Root Mean Square Error |
| SS | Steady-state error |
| UTC | Coordinated Universal Time |
| MITM | Man-In-The-Middle |
| DMZ | Demilitarized Zone |
| HMAC | Hash-based Message Authentication Code |
| TPM | Trusted Platform Module |
| KMS | Key Management System |
Appendix A
| NIS2 principle | Implementation in the considered architecture |
Exact reference for NIS2 (article/paragraph) |
|---|---|---|
| Risk management |
Comprehensive risk assessment; QFT modelling of parametric uncertainty; Continuous monitoring via Digital Twin; Threat modelling and security baselines |
Art. 21 (1) and (2) Requirement for adequate and proportionate technical, operational and organizational risk-management measures |
| Incident handling / reporting | DT-based anomaly detection; Incident simulation; Signaling to SIEM/CSIRT; Forensic logs | Art. 21 (2)(d) Measures for incident handling; Art. 23: Obligation to notify/report significant incidents (notification obligations) |
| Business continuity / resilience | QFT robustness; DT snapshots; Backup and disaster-recovery procedures | Art. 21 (2)(e) Measures for ensuring business continuity and crisis management (business continuity & disaster recovery) |
|
Supply chain security |
Signed firmware, update validation; Patch management; Vulnerability disclosure | Art. 21 (2)(g) Measures for supply-chain security; Art. 22: Union-level coordinated supply-chain risk assessments |
|
Testing and auditing |
DT-based testing; Log retention for audits | Art. 21 (2)(i) Security testing/auditing measures; Art. 24 Supervisory authorities’ powers for inspections and audits |
|
Vulnerability management |
Automated scanning, classification and testing in a DT environment | Art. 21 (2)(f) Measures for vulnerability handling and monitoring as part of risk-management policies |
|
Cryptography / confidentiality |
TLS/VPN, HMAC, TPM, secure boot, centralized KMS | Art. 21 (2)(b) Measures to ensure confidentiality, integrity and authenticity, including through cryptography |
| IT/OT segmentation and convergence | OT–IT segmentation with DMZ | Art. 21 (2)(a), (b), (j) Measures for network and information system security, cryptographic protection and logging; Art. 21 (2)(g) supply-chain protection |
|
Accountability / traceability (logging & forensics) |
Centralized logging and audit trail | Art. 21 (2)(j) Logging, control and accountability measures; Art. 24: Inspections/audit trail requirements |
References
- Siciliano, B.; Khatib, O. (Eds.). Springer Handbook of Robotics. Springer, 2nd ed., 2016. [CrossRef]
- Spong, M. W.; Hutchinson, S.; Vidyasagar, M. Robot Modeling and Control. Wiley, 2nd ed., 2020, ISBN: 978-1-119-52404-5.
- Khalil, W.; Dombre, E. Modeling, Identification and Control of Robots. Butterworth-Heinemann, 2nd ed., 2002. [CrossRef]
- Åström, K. J.; Murray, R. M. Feedback Systems: An Introduction for Scientists and Engineers. Princeton University Press, ISBN: 9780691193984, 2021.
- Lewis, F. L.; Xie, L.; Popa, D. L. Optimal and Robust Estimation. CRC Press, 2017. [CrossRef]
- ISO 10218-1:2025 - Robots - Safety requirements for industrial robots.
- Y. Lu, C. Liu, K. I.-K. Wang, H. Huang, and X. Xu, Digital Twin-driven smart manufacturing: Connotation, reference model, applications and research issues, Robotics and Computer-Integrated Manufacturing, vol. 61, p. 101837, 2020. [CrossRef]
- Horowitz, I. M. Quantitative Feedback Design Theory. IEEE Press, 1992, ISBN 10: 0963576003 ISBN 13: 9780963576002.
- Bhattacharyya, S.P.; Chapellat, H.; Keel, L.H. Robust Control: The Parametric Approach. Prentice Hall: Upper Saddle River, NJ, USA, 1995, ISBN: 978-0-13-781576-0.
- Garcia-Sanz, M.; Houpis, C. Wind Energy Systems, Control Engineering Design. CRC Press, 2012, ISBN 9781439821794.
- Luh, J. Y. S.; Walker, M. W.; Paul, R. P. C. Resolved-Acceleration Control for Mechanical Manipulators. IEEE TAC, 1980, 25, 468–474. [CrossRef]
- Slotine, J. J. E.; Li, W. Applied Nonlinear Control. Prentice Hall: Englewood Cliffs, NJ, USA, 1991, ISBN 0-13-040890-5.
- Kukushkin, K.; Ryabov, Y.; Borovkov, A. Digital Twins: A Systematic Literature Review Based on Data Analysis and Topic Modeling. Data 2022, 7, 173. [CrossRef]
- Boje, E., Multivariable quantitative feedback design for tracking error specifications, Automatica, Volume 38, Issue 1, 2002, Pages 131-138, ISSN 0005-1098. [CrossRef]
- Tao, F.; Cheng, J.; Qi, Q.; Zhang, M.; Zhang, H.; Sui, F., Digital twin-driven product design, manufacturing and service with big data. Int J Adv Manuf Technol 94, 3563–3576 (2018). [CrossRef]
- Q. Qi and F. Tao, Digital Twin and Big Data Towards Smart Manufacturing and Industry 4.0: 360 Degree Comparison, in IEEE Access, vol. 6, pp. 3585-3593, 2018. [CrossRef]
- Kritzinger, W.; Karner, M.; Traar, G.; Henjes, J.; Sihn, W. Digital Twin in Manufacturing: A Categorical Literature Review and Classification. IFAC-PapersOnLine 2018, Volume 51, Issue 11, 1016-1022. [CrossRef]
- Jones, D.; Snider, C.; Nassehi, A.; Yon, J.; Hicks, B. Characterising the Digital Twin: A Systematic Literature Review. CIRP Journal of Manufacturing Science and Technology, 29, 36-52. [CrossRef]
- European Parliament and Council of the European Union, Directive (EU) 2022/2555 on measures for a high common level of cybersecurity across the Union (NIS-2 Directive), Off. J. Eur. Union, L 333, pp. 80–152, 27 Dec. 2022.
- ENISA, Technical Implementation Guidance for NIS2 Cybersecurity Risk Management Measures, European Union Agency for Cybersecurity, 2024.
- Shao, G.; Helu, M. Framework for a Digital Twin in Manufacturing: Scope and Requirements. Manufacturing Letters 2020. [CrossRef]
- Rasheed, A.; San, O.; Kvamsdal, T. Digital Twin: Values, Challenges and Enablers. ASME JCISE 2020.
- Duan, L.; Tian, Z. Digital Twin-Based System Design and Optimization: A Survey. Applied System Innovation 2021, 4, 85. [CrossRef]
- Wu, H.; Ji, P.; Ma, H.; Xing, L. A Comprehensive Review of Digital Twin from the Perspective of Total Process: Data, Models, Networks and Applications. Sensors 2023, 23, 8306. [CrossRef]
- Tao, F.; Zhang, M. Digital Twin Shop-Floor: A New Shop-Floor Paradigm Towards Smart Manufacturing. IEEE Access 2017, pp. 20418-20427. [CrossRef]
- Liang, X.; Xiao, R.; Zhang, J. A Review on Digital Twin for Robotics in Smart Manufacturing, 2022 IEEE 17th Conference on Industrial Electronics and Applications (ICIEA), Chengdu, China, 2022, pp. 1510-1515. [CrossRef]
- Moyne, J.; Qamsane, Y.; Balta, E.C.; Kovalenko, I.; Faris, J.; Barton, K.; Tilbury, D.M. A Requirements Driven Digital Twin Framework: Specification and Opportunities. IEEE Access 2020, 8, 107781–107801. [CrossRef]
- Chikurtev, D.; Ivanov, V.; Tsvetanov, S.; Yovchev, K. Robot Modeling and Control in Digital Twin System. Eng. Proc. 2025, 100, 62. [CrossRef]
- Cen, Y.; Deng, J.; Chen, Y.; Liu, H.; Zhong, Z.; Fan, B.; Chang, L.; Jiang, L. Digital Twin-Empowered Robotic Arm Control: An Integrated PPO and Fuzzy PID Approach. Mathematics 2025, 13, 216. [CrossRef]
- Xingjian, F.; Jiahui, H. Robust Adaptive Control for Robot Manipulators Trajectory Tracking Based on Iterative Learning Observer with Time-Delay. Comptes Rendus de l’Académie Bulgare des Sciences, 2022, 75(6), 886–894. [CrossRef]
- Ghavam, M.; Shafei, B. Robust QFT-Based Position Control of an Asymmetric Electro-Hydraulic Servo System. International Journal of Robotics and Automation Technology 2018, 5, 1–6. [CrossRef]
- Wang, R.; Wang, C.; Di, C.; Wang, Y.; Yang, D.; Xu, P. Compliant Control of Robots in Dynamic Uncertain Environments. Journal of Physics: Conference Series 2025, 3120, 012030. [CrossRef]
- Van, M.; Kang, H.-J. Robust Fault-Tolerant Control for Uncertain Robot Manipulators Based on Adaptive Quasi-Continuous High-Order Sliding Mode and Neural Network. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science 2015, 229(8), 1436–1453. [CrossRef]
- Garg, G.; Kuts, V.; Anbarjafari, G. Digital Twin for FANUC Robots: Industrial Robot Programming and Simulation Using Virtual Reality. Sustainability 2021, 13, 10336. [CrossRef]
- Panasiuk, J. Controlling an Industrial Robot Using Stereo 3D Vision Systems with AI Elements. Sensors 2025, 25, 6402. [CrossRef]
- Qin, Q.; Liu, Z.; Zhong, R.; Wang, X. V.; Wang, L.; Wiktorsson, M.; Wang, W., Robot digital twin systems in manufacturing: Technologies, applications, trends and challenges, Robotics and Computer-Integrated Manufacturing, vol. 97, art. 103103, Feb. 2026. [CrossRef]
- Alcaraz C.; López, J., Digital Twin: A Comprehensive Survey of Security Threats, IEEE Commun. Surveys & Tutorials, vol. 24, no. 3, pp. 1475–1503, 2022. [CrossRef]
- Chang, H. -C., Lin, C. -Y., Liao, D. -J., Koo, T. -M., The Modbus Protocol Vulnerability Test in Industrial Control Systems, 2020 International Conference on Cyber-Enabled Distributed Computing and Knowledge Discovery (CyberC), Chongqing, China, 2020, pp. 375-378. [CrossRef]
- Schleipen,M., Gilani, S.-S., Bischoff, T., Pfrommer, J., OPC UA & Industrie 4.0 - Enabling technology with high diversity and variability, Procedia CIRP, vol. 57,2016, pp. 315-320. [CrossRef]
- Wan, S.; Li, J.; Celesti, A.; Fazio, M., A survey on communication protocols for Industry 4.0 and IIoT, Computer Networks, vol. 186, art. 107738, 2021. [CrossRef]
- Wang, Z., Xie, W., Wang, B., Tao, J., Wang, E., A survey on recent advanced research of CPS security, Applied Sciences, vol. 11, no. 9, art. 3751, Apr. 2021. [CrossRef]
- Kayan, H., Nunes, M., Rana, O., Burnap, P., Perera, Ch., Cybersecurity of Industrial Cyber-Physical Systems: A Review, ACM Comput. Surv. 54, 11s, Article 229, 2022, 1-35 pages. [CrossRef]
- Huang, Z.; Shen, Y.; Li, J.; Fey, M.; Brecher, C. A Survey on AI-Driven Digital Twins in Industry 4.0: Smart Manufacturing and Advanced Robotics. Sensors 2021, 21, 6340. [CrossRef]
- Brous, P.; Janssen, M.; Herder, P. The dual effects of the Internet of Things (IoT): A systematic review of the benefits and risks of IoT adoption by organizations. Int. J. Inf. Manag. 2020, 51, 101952. [CrossRef]
- European Commission. Industry 5.0 and Digital Transformation Framework, European Union: Brussels, Belgium, 2023.
- Ruohonen, J., A Systematic Literature Review on the NIS2 Directive, arXiv, Dec. 2024. [CrossRef]
- Castiglione, G.; Santamaria, D. F.; Bella, G., An Ontological Approach to Compliance Verification of the NIS 2 Directive, in Proc. Joint Ontology Workshops (JOWO 2023), vol. 3637, CEUR Workshop Proceedings, 2023, pp. 1–12.
- Ristvej, J.; Tonhauser, M.; Chovanec, D.; et al. Cyber resilience conceptual model for European Union NIS2 standards implementation in Slovakia. Sci. Rep. 2025, 15, 26902. [CrossRef]
- Karlova-Sergieva, V. Approach for the Assessment of Stability and Performance in the s- and z-Complex Domains. Automation 2025, 6, 61. [CrossRef]
| Category | Representative publications | Scope | Limitations / Gaps |
|---|---|---|---|
| Robust & QFT control for robots | [8,9,10,11,12,13,14], [31,32,33] |
Robust control, parametric uncertainty, worst-case analysis | No integration with PLCs, real-time execution, or industrial communication; cybersecurity not considered |
| Digital twin for robotics & manufacturing | [15,16,17,18], [22,23,24,25,26,27,28,29,30], [34,35,36] |
Twin-based simulation, predictive maintenance, virtual commissioning | DT used mainly for simulation; no robust control and no PLC-in-the-loop architectures |
| PLC, industrial communication & timing | [34,35,36,37,38,39,40,41,42] | PLC cycles, Modbus, OPC UA, synchronization | No assessment of impact on QFT; limited data on cryptographic overhead |
| Cybersecurity, OT security & NIS2 | [19,20], [37,38,39,40,41,42,43,44,45,46,47,48] |
Vulnerability analysis; NIS2 frameworks; DT for incident reporting | No linkage between control (QFT), PLC execution, and NIS2 requirements; no quantitative evaluation |
| Integrated cyber-physical digital twin with QFT & NIS2 security architectures | - | - | No publications: this is exactly the contribution of the present work |
| Parameters | Values | Description |
|---|---|---|
| Protocol | Modbus TCP/IP | Ethernet (port 502) |
| Operating mode | Server (robot) / Client (twin) | The controller accepts requests from the digital twin |
| IP address | 192.168.1.10 (robot), 192.168.1.20 (twin) | Fixed addresses on a local network |
| Functional codes | 01, 02, 03, 04, 05, 06, 15, 16 | Read/write Coil, Discrete, Input, Holding registers |
| Refresh cycle | 20 - 50 ms | Depending on the load and latency required |
| Safety | CRC check + timeout (200 ms) | Control of package integrity and responses |
| Parameters | Modbus | Description | Format |
|---|---|---|---|
| JOINT_FEEDBACK [J1-J5] | 30001-30010 (Input) | Current joint angles | Float (2×16-bit) |
| ROBOT_STATUS | 10001 (Discrete Input) | Ready, error, execution state | Bit field |
| ALARM_CODE | 30020 | Last alarm code | UInt16 |
| CYCLE_TIME | 30030 | Current cycle time [ms] | UInt16 |
| TEMPERATURE_J1-J5 | 30040-30049 | Motor temperatures | Float (2×16-bit) |
| Communication | Protocol |
| PLC → FANUC R-30iB FANUC R-30iB → PLC |
Modbus TCP/IP |
| PLC → MATLAB (QFT and IK) MATLAB → PLC |
OPC UA (TLS 1.3, X.509) |
| PLC → ROBOGIDE ROBOGIDE → PLC |
OPC UA |
| PLC →SIEM ROBOGIDE → SIEM |
Syslog over TLS / OPC UA Events |
| MATLAB → SIEM | Syslog / TLS |
| SIEM → Incident response engine | REST API / MQTT over TLS |
| Incident response engine → PLC | REST API / OPC UA |
| Time server →PLC Time server → MATLAB Time server → ROBOGIDE Time server → SIEM / Incident response engine |
NTP/PTP |
| IAM → PLC / MATLAB / ROBOGIDE | LDAP(S), Kerberos, OAuth2 |
| Axis (Joint) | Meaning | [s] | range | range [s] | |
|---|---|---|---|---|---|
| J1 | Base rotation | 3.8 | 1.9 | [3.6, 8.6] | [0.5, 5.0] |
| J2 | Shoulder | 0.25 | 6.0 | [0.253, 0.753] | [6.0, 11.0] |
| J3 | Elbow | 3.8 | 1.5 | [3.8, 3.8] | [1.0, 4.5] |
| J4 | Wrist pitch | 3.6 | 1.1 | [3.4, 4.6] | [0.8, 3.0] |
| J5 | Wrist roll | 3.6 | 0.9 | [3.4, 4.6] | [0.6, 2.0] |
| ID | Test Scenario | Purpose | NIS2 Phase |
|---|---|---|---|
| 1 | Dynamic load | Verification of QFT controller stability | Protect |
| 2 | Mechanical disturbances | Evaluation of disturbance compensation properties | Protect |
| 3 | Communication delay | Detection and response under degraded network conditions | Detect |
| 4 | Parametric uncertainty | Verification of QFT robustness bounds | Detect |
| 5 | Cyber incident | Safe-mode activation and recovery | Respond–Recover |
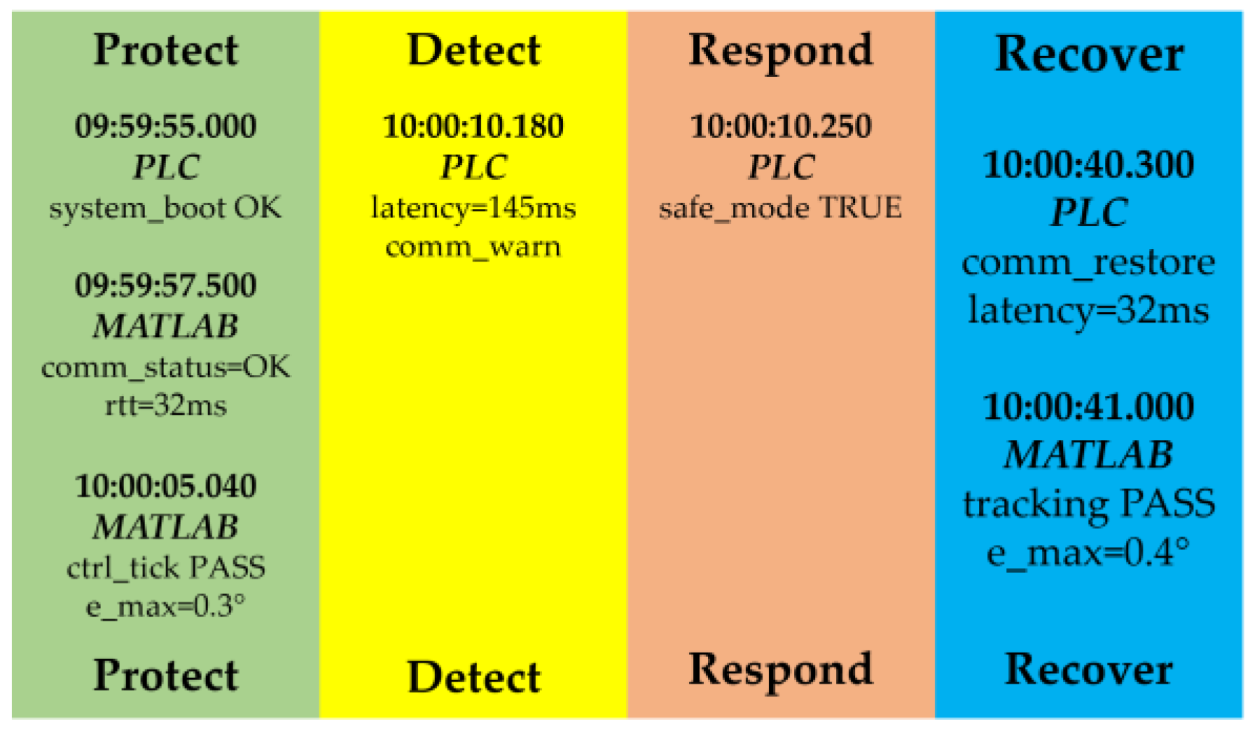
| Time (UTC) | Source | Event | Explanation | NIS2 Phase |
|---|---|---|---|---|
| 09:59:55.000 | PLC | system_boot OK | PLC startup and self-test | Protect |
| 09:59:57.500 | MATLAB | comm_status=OK rtt=32 ms | Stable MATLAB–PLC–Twin communication | Protect |
| 10:00:05.040 | MATLAB | ctrl_tick PASS e_max=0.3° | Normal QFT controller operation | Protect |
| 10:00:10.180 | PLC | latency=145 ms comm_warn | Detected communication delay | Detect |
| 10:00:10.250 | PLC | safe_mode TRUE | Automatic transition to safe mode | Respond |
| 10:00:40.300 | PLC | comm_restore latency=32 ms | Restoration of normal communication | Recover |
| 10:00:41.000 | MATLAB | tracking PASS e_max=0.4° | Control stabilized within QFT limits | Recover |
| Aspect | NIS2 Requirement |
System Implementation |
|---|---|---|
| Access control | Protect | PLC user roles, login logs |
| Anomaly detection | Detect | Latency monitoring, QFT FAIL conditions |
| Response | Respond | Automatic SAFE MODE activation |
| Recovery | Recover | Restore and resume procedure |
| Traceability | Logging | Synchronized PLC & MATLAB logs |
| Simulation | Twin validation | Safe verification without physical risk |
| Model | Max X [mm] | Max Y [mm] | Max Z [mm] | Max 3D [mm] | RMS 3D [mm] |
|---|---|---|---|---|---|
| Nominal | 10.3992 | 9.2272 | 16.5230 | 20.5616 | 13.0638 |
| Worst-Case | 10.5040 | 9.3285 | 16.3827 | 20.3752 | 13.0925 |
| Condition | Max 3D [mm] | RMS 3D [mm] | Max X [mm] | Max Y [mm] | Max Z [mm] |
|---|---|---|---|---|---|
| NoDist | 20.3752 | 13.0925 | 10.5040 | 9.3285 | 16.3827 |
| WithDist | 20.3752 | 13.0925 | 10.5040 | 9.3285 | 16.3827 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).



