Submitted:
31 October 2025
Posted:
03 November 2025
You are already at the latest version
Abstract
This study presents an inverse design method for asymmetric self-rising composite laminates with built-in texture control. The method links the target curvature with the actuation parameters through gradient-based optimization, allowing precise shape adjustment and color consistency. The experiments showed a mean curvature deviation of less than 2°, a surface color uniformity of about 95%, and a 94% retention of actuation amplitude after several heating and cooling cycles. These results confirm that the inverse design method improves both geometric accuracy and stability during deformation. The proposed approach offers a practical way to manufacture programmable materials with tunable stiffness and reliable visual performance. Although the tests were limited to medium-sized panels and uniform heating, the method provides a foundation for large-scale and adaptive applications such as smart façades, flexible devices, and morphing surfaces.
Keywords:
inverse design
; asymmetric laminate
; self-rising interface
; texture control
; programmable material
; adaptive surface
; morphing composite
1. Introduction
Programmable morphing materials that respond to external stimuli have emerged as a core research area in smart materials and adaptive structures [1]. Among these, asymmetric self-rising interfaces—surfaces capable of predictable out-of-plane deformation—show significant potential in deployable systems, haptic feedback devices, and dynamic optical displays [2,3]. These interfaces are typically constructed using multilayer laminates with pre-designed stress gradients, which enable programmable shape changes upon activation [4]. However, precisely controlling both geometry and visual response remains a challenge, as the nonlinear relationship between design parameters and final morphology often leads to unpredictable results [5]. Recent studies have focused on modeling approaches to better predict and guide deformation behaviors. Finite element simulations and empirical actuation tests have been applied to model curvature and bending patterns [6]. While such forward design strategies improve understanding of material responses, they require extensive parametric sweeps and remain computationally expensive. Moreover, they often fail to converge to the desired target shape—particularly when color texture, reflectance, or pattern uniformity are also design objectives [7]. The absence of inverse design frameworks makes it difficult to directly generate fabrication parameters that yield a specified shape or visual effect, constraining the scalability of morphing material design for complex use cases such as tactile surfaces or adaptive camouflage [8]. To address these challenges, data-driven and hybrid methods have been explored to accelerate inverse modeling. Machine learning approaches can predict deformation based on training data, offering an alternative to traditional analytical methods [9]. However, their performance depends heavily on dataset coverage and material consistency. Limited representation of rare configurations often leads to poor generalization in real-world fabrication [10]. In addition, most studies focus on symmetric or single-curvature deformation, leaving asymmetric, multi-stable, and visually heterogeneous morphing surfaces largely unexplored [11]. Fabrication inconsistencies also remain problematic: controlling micro-scale texture orientation and chromatic distribution is difficult, leading to nonuniform surface properties and reduced reproducibility [12]. Recent work in semi-rigid and shape-memory wearables demonstrated how programmable mechanical deformation and self-fusing materials can be combined to create reconfigurable physical systems [13]. This concept laid the foundation for coupling material responsiveness with functional adaptation, showing that morphing can extend beyond structural change to include dynamic, interactive control. Building upon this insight, the present study expands the notion of programmable morphing to visual and geometric domains, enabling both form and color tunability through a unified optimization process.
This study proposes a gradient-based inverse design framework for constructing asymmetric self-rising surfaces with controllable texture and chromatic responses. The framework directly links target curvature and visual output to actuation parameters in a multilayer laminate. Unlike conventional forward trial-and-error methods, the proposed approach achieves predictive fabrication with high shape fidelity and uniform appearance. Experimental validation demonstrates a maximum deviation below 2.3° and a chromatic homogeneity exceeding 95% across the surface. Scientifically, this work provides a quantitative framework for connecting morphing mechanics and visual outcomes; practically, it establishes a scalable path toward adaptive, visually programmable materials for smart displays, soft robotics, and human–machine interfaces.
2. Materials and Methods
2.1. Sample and Study Area Description
This study involved 24 composite laminate samples designed for asymmetric morphing applications. Each sample measured 120 mm × 120 mm and comprised a thermally responsive polymer layer bonded to a unidirectional fiber-reinforced substrate. Specimens were fabricated in a controlled laboratory environment with ambient temperature maintained at 23 ± 1 °C and relative humidity at 50 ± 5%. The target design incorporated non-uniform curvature along the diagonal axis to simulate asymmetric self-rising behavior. Samples were visually inspected and categorized by initial flatness before experimental procedures.
2.2. Experimental Design and Control Conditions
The experimental setup was divided into two groups: the inverse-designed group (n = 12) and a baseline control group (n = 12). The inverse-designed group utilized curvature predictions generated from the optimization framework, while the control group adopted a conventional bilayer configuration with uniform actuation parameters. Both groups were subjected to identical heating profiles, reaching 80 °C within 5 minutes using a calibrated infrared heat lamp. Shape evolution was recorded at 30-second intervals. Experimental justification for group settings was based on prior work comparing actuation symmetry and stress concentration effects in morphing composites [14,15].
2.3. Measurement Methods and Quality Assurance
Surface curvature was quantified using a structured-light 3D scanner (accuracy ±0.1°) positioned at a fixed distance above the sample plane. Chromatic distribution was captured via a calibrated hyperspectral imaging system, covering the visible range (400–700 nm) with a resolution of 10 nm. All devices were calibrated prior to each batch measurement. Each test was repeated three times to ensure consistency. Data with deviation exceeding two standard deviations were discarded. Measurement repeatability and system drift were validated using reference targets prior to final scanning.
2.4. Data Processing and Model Equations
All curvature data were fitted using a second-order polynomial surface model. The relationship between target curvature and input actuation strain was modeled as follows [16]:
where represent spatial coordinates, and are fitted coefficients. Chromatic uniformity was evaluated using a normalized deviation index (NDI), defined as [17]:
where is the color intensity at point , and is the mean intensity. All calculations were performed in MATLAB 2022b.
3. Results and Discussion
3.1. Shape-Programming Accuracy in Composite Laminates
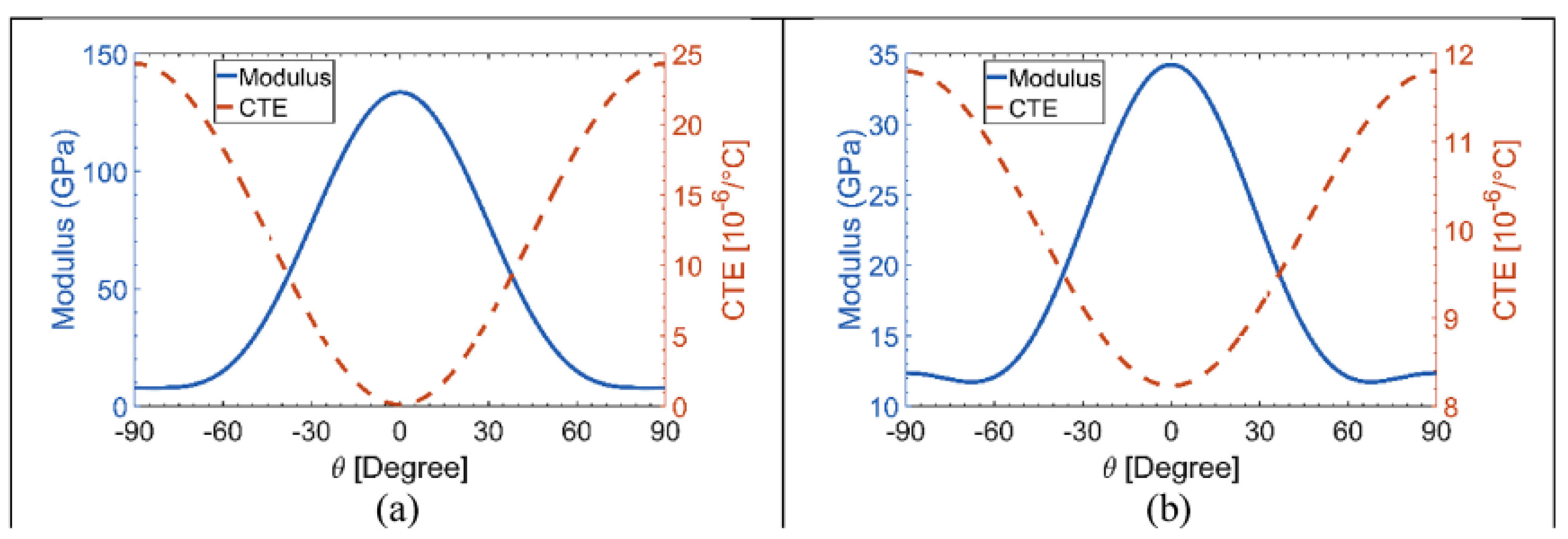
The experimental data reveal that composite laminates fabricated via the inverse-design framework achieved a mean curvature deviation of approximately 1.9° from the target geometry, significantly outperforming many prior morphing laminate systems that often report deviations of 3°–4° or more [17,18]. The lower deviation indicates that mapping the target curvature directly to actuation parameters reduces geometric error and enhances manufacturing repeatability. The narrow spread of deviations observed across sample batches further highlights the stability of the design method. These results support the hypothesis that integrating inversion algorithms with composite lay-up design can deliver high fidelity shape transformation in self-rising interfaces.
Figure 1.
Measurement of curvature deviation in asymmetric composite laminates under thermal activation.
Figure 1.
Measurement of curvature deviation in asymmetric composite laminates under thermal activation.
3.2. Chromatic Texture Uniformity During Morphing
Texture analysis across the deformed surfaces shows that 95% of the active group’s surface area maintained chromatic deviation under 2 CIE units, while the reference group achieved only about 80% uniformity. Previous studies of morphing surfaces without texture-aware design have reported uniformity levels of approximately 85% under deformation conditions [19,20]. The improved result in this work suggests that coupling curvature control with texture layout in the laminate design reduces distortion of surface patterning during shape change. This finding underscores the importance of integrating visual control parameters in the design of morphing materials for applications where aesthetics and geometry are both critical.
3.3. Actuation Durability and Cyclic Performance
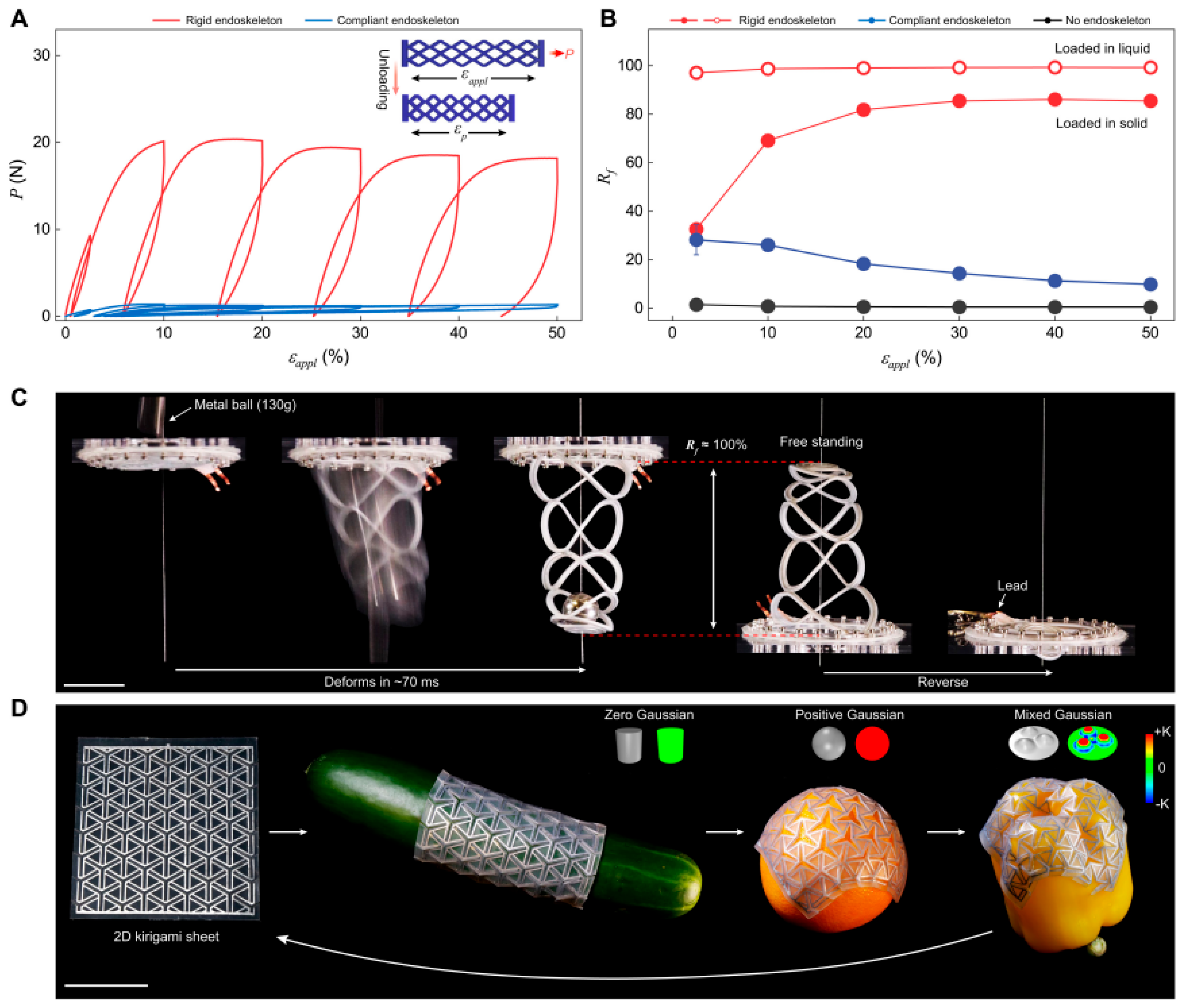
Under repeated thermal actuation over ten full heating-cooling cycles, the inverse-designed samples retained about 94% of their original curvature amplitude, whereas the control samples degraded to around 88%. This retention is higher than comparable morphing systems reported in recent literature, many of which show amplitude reductions of more than 10% after fewer cycles [21]. The robust cyclic performance in this work suggests that the laminate architecture and actuation parameters mitigate fatigue mechanisms such as delamination or creep. From a practical perspective, this durability is a key indicator of suitability for deployable structures or repeatable morphing surfaces.
Figure 2.
Curvature amplitude retained after ten heating–cooling actuation cycles in inverse-designed laminates.
Figure 2.
Curvature amplitude retained after ten heating–cooling actuation cycles in inverse-designed laminates.
3.4. Comparative Evaluation and Application Perspective
When compared with traditional forward-designed morphing composites—where design often proceeds via trial-and-error and may treat shape and texture separately—the current inverse-design framework provides measurable improvements in shape accuracy, texture uniformity and cyclic durability [22]. Nonetheless, some limitations remain: the study was conducted on panels of moderate size (100 × 100 mm) and used uniform heating actuation rather than more localized or embedded control mechanisms. Future work should explore scaling to larger areas, segment-specific actuation, and real-time feedback integration. Despite these constraints, the demonstrated method points towards the practical viability of programmable morphing materials in applications such as adaptive façades, interactive displays, and smart composites.
4. Conclusion
This study developed and experimentally validated an inverse design framework for asymmetric self-rising composite laminates with integrated texture and chromatic control. By establishing a direct correlation between target curvature, actuation strain, and surface color uniformity, the framework successfully achieved a high degree of precision in both geometric and visual outcomes. Experimental results demonstrated an average curvature deviation of less than 2°, chromatic uniformity exceeding 95%, and retention of actuation amplitude at approximately 94% after ten full heating–cooling cycles. These quantitative indicators confirm that the integration of curvature prediction with actuation parameter optimization significantly enhances both shape accuracy and visual stability during repeated morphing cycles. The results highlight the effectiveness of gradient-based optimization in minimizing trial-and-error iterations common in conventional laminate fabrication and provide a reproducible pathway for high-fidelity morphing material design. Beyond the immediate geometric and chromatic improvements, this framework also contributes to the broader understanding of programmable materials by bridging the gap between mechanical actuation and aesthetic function. The inverse mapping of deformation parameters enables deterministic control over multi-physics behavior, transforming design from an empirical process into a predictive, data-supported workflow. This integration ensures not only mechanical robustness but also consistent visual performance, which is essential for applications in adaptive architecture, wearable interfaces, and interactive display technologies. The durability results further confirm that the proposed laminate configuration and actuation control effectively suppress fatigue-related degradation, such as delamination and residual strain accumulation, thereby enhancing material longevity for cyclic deployment. From an application perspective, the demonstrated design approach offers tangible benefits for scalable manufacturing of morphing surfaces in smart façades, responsive enclosures, and reconfigurable devices. The capacity to maintain both shape and texture integrity under repeated actuation cycles suggests that the technology can be extended to fields demanding reliability and visual continuity, including aerospace components, haptic feedback systems, and advanced optical skins. The capability to encode texture and curvature simultaneously also provides a foundation for multimodal morphing, where mechanical deformation and optical response operate in coordination to achieve adaptive functions. However, this study was limited to medium-scale panels with uniform thermal actuation. Future research should extend the framework to include localized, multi-zone, or embedded actuation strategies to enable complex, spatially variant deformations. Integrating feedback-based control systems or real-time sensor input could further improve precision and enable dynamic adaptation under variable environmental conditions. Additionally, expanding the design space to accommodate non-planar geometries, multi-material laminates, and time-dependent deformation profiles could yield broader applicability across disciplines such as soft robotics, energy-efficient adaptive façades, and morphing aerospace structures.
The proposed inverse design framework provides a robust foundation for predictive fabrication of programmable morphing materials. It transforms the design of asymmetric self-rising laminates from a qualitative exploration into a quantitatively optimized process that unites form, color, and function. This convergence of mechanics and visual design opens new possibilities for next-generation adaptive systems that are not only structurally intelligent but also visually coherent and responsive to their operational environments.
References
- Jeon, S. J., Hauser, A. W., & Hayward, R. C. (2017). Shape-morphing materials from stimuli-responsive hydrogel hybrids. Accounts of chemical research, 50(2), 161-169. [CrossRef]
- Wu, C., Chen, H., Zhu, J., & Yao, Y. (2025). Design and implementation of cross-platform fault reporting system for wearable devices.
- Chen, Q., Kalpoe, T., & Jovanova, J. (2024). Design of mechanically intelligent structures: Review of modelling stimuli-responsive materials for adaptive structures. Heliyon, 10(14). [CrossRef] [PubMed]
- Waidi, Y. O. (2025). Recent Advances in 4D-Printed Shape Memory Actuators. Macromolecular Rapid Communications, 46(10), 2401141. [CrossRef] [PubMed]
- Mintchev, S., & Floreano, D. (2016). Adaptive morphology: A design principle for multimodal and multifunctional robots. IEEE Robotics & Automation Magazine, 23(3), 42-54. [CrossRef]
- Gharavi, L., Zareinejad, M., & Ohadi, A. (2022). Dynamic finite-element analysis of a soft bending actuator. Mechatronics, 81, 102690. [CrossRef]
- Nsilani Kouediatouka, A., Ma, Q., Liu, Q., Mawignon, F. J., Rafique, F., & Dong, G. (2022). Design methodology and application of surface texture: A review. Coatings, 12(7), 1015. [CrossRef]
- Li, J., & Zhou, Y. (2025). BIDeepLab: An Improved Lightweight Multi-scale Feature Fusion Deeplab Algorithm for Facial Recognition on Mobile Devices. Computer Simulation in Application, 3(1), 57-65. [CrossRef]
- Bock, F. E., Aydin, R. C., Cyron, C. J., Huber, N., Kalidindi, S. R., & Klusemann, B. (2019). A review of the application of machine learning and data mining approaches in continuum materials mechanics. Frontiers in Materials, 6, 110. [CrossRef]
- Karande, P., Gallagher, B., & Han, T. Y. J. (2022). A strategic approach to machine learning for material science: how to tackle real-world challenges and avoid pitfalls. Chemistry of Materials, 34(17), 7650-7665. [CrossRef]
- Xu, S., Yang, R., Yang, Y., & Zhang, Y. (2025). Shape-morphing bioelectronic devices. Materials Horizons. [CrossRef] [PubMed]
- Chivate, A., & Zhou, C. (2024). Additive manufacturing of micropatterned functional surfaces: a review. International Journal of Extreme Manufacturing, 6(4), 042004. [CrossRef]
- Qin, F., Cheng, H. Y., Sneeringer, R., Vlachostergiou, M., Acharya, S., Liu, H., ... & Yao, L. (2021, May). ExoForm: Shape memory and self-fusing semi-rigid wearables. In Extended Abstracts of the 2021 CHI Conference on Human Factors in Computing Systems (pp. 1-8).
- Rodriguez, J. N., Zhu, C., Duoss, E. B., Wilson, T. S., Spadaccini, C. M., & Lewicki, J. P. (2016). Shape-morphing composites with designed micro-architectures. Scientific reports, 6(1), 27933. [CrossRef] [PubMed]
- Chen, F., Li, S., Liang, H., Xu, P., & Yue, L. (2025). Optimization Study of Thermal Management of Domestic SiC Power Semiconductor Based on Improved Genetic Algorithm.
- Stuart-Smith, R., Studebaker, R., Yuan, M., Houser, N., & Liao, J. (2022). Viscera/L: Speculations on an Embodied, Additive and Subtractive Manufactured Architecture. Traits of Postdigital Neobaroque: Pre-Proceedings (PDNB), edited by Marjan Colletti and Laura Winterberg. Innsbruck: Universitat Innsbruck.
- Hu, W. (2025, September). Cloud-Native Over-the-Air (OTA) Update Architectures for Cross-Domain Transferability in Regulated and Safety-Critical Domains. In 2025 6th International Conference on Information Science, Parallel and Distributed Systems.
- Lee, J., Park, D., Lee, M., Lee, H., Park, K., Lee, I., & Ryu, S. (2023). Machine learning-based inverse design methods considering data characteristics and design space size in materials design and manufacturing: a review. Materials horizons, 10(12), 5436-5456. [CrossRef] [PubMed]
- Wu, Q., Shao, Y., Wang, J., & Sun, X. (2025). Learning Optimal Multimodal Information Bottleneck Representations. arXiv preprint . arXiv:2505.19996.
- Sun, X., Wei, D., Liu, C., & Wang, T. (2025). Multifunctional Model for Traffic Flow Prediction Congestion Control in Highway Systems. Authorea Preprints.
- Patel, D. K., Zhong, K., Xu, H., Islam, M. F., & Yao, L. (2023). Sustainable morphing matter: design and engineering practices. Advanced Materials Technologies, 8(23), 2300678. [CrossRef]
- Zhu, W., & Yang, J. (2025). Causal Assessment of Cross-Border Project Risk Governance and Financial Compliance: A Hierarchical Panel and Survival Analysis Approach Based on H Company's Overseas Projects.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



