Submitted:
20 September 2025
Posted:
29 September 2025
Read the latest preprint version here
Abstract
What is new. Within a first–order (Palatini) setting we impose a scalar PT projector on all observable scalar densities, restricting to at most one derivative per building block. Under this setting the framework implies: (i) a unique, pure–trace torsion aligned with ∂ϵ (C1); (ii) a bulk equivalence of three ostensibly different rank–one constructions with the same quadratic coefficient A⋆ = λ2/8 (C2); and (iii) a unique weight ratio between the rank–one determinant and closed–metric routes that removes TT–nonTT mixing and enforces the equal–coefficient identity K=G (C3), hence cT=1 at quadratic order. Setup. All observable scalars are mapped by a scalar PT projector ΠPT( · ) to a real, even sector; the internal phase ϵ(x) is a nondynamical spurion that enters only through ∂ϵ. With global assumptions A1–A6 (PT–invariant domain/measure, [PT , ∗]=0, projection–variation commutation, boundary/topology posture, Nieh–Yan as boundary counterterm, and a trace lock), we work at quadratic order with at most one derivative per building block. The trace lock is enforced algebraically so that Tμ = 3η ∂μϵ (no new canonical pairs under A4). Results. (C1) Palatini algebraicity plus the scalar projector force Sμ=0, qλμν=0, and TA BC = 2η δA [B∂C]ϵ, yielding the invariant IT = −6η2 ΠPT[(∂ϵ)2]. (C2) After C1 and projection, the three routes—(i) a rank–one determinant built from the canonical traceless matrix, (ii) a closed–metric rank–one deformation, and (iii) the PT–even CS/Nieh–Yan shadow—collapse to the same bulk quadratic piece A⋆ √−g (σϵ IT) up to improvements, with A⋆ = λ2/8. (Our “ROD” is a parity–even volume deformation, not Born–Infeld gravity.) (C3) On flat FRW (unitary gauge) the two independent TT–nonTT mixing entries are proportional and fix the locked ratio wROD : wCM = 2 : 3 . On generic admissible patches the two mixing equations are non–collinear, selecting the same unique ratio; with this locking we prove K(w)=G(w) (a total– divergence identity on the admissible variational domain), hence c2 T = 1 and a GR TT sector with no extra propagating degrees of freedom. Reproducibility and scope. All figures and coefficients are reproduced by the accompanying open–source notebooks and scripts; the 2:3 ratio is extracted by an automated mixing–matrix check on flat FRW and its generic uniqueness follows from the non–collinearity argument. Matter couplings respect the posture (axial channel vanishes; the trace coupling is removable up to a Nieh–Yan boundary shift). The leading PT–even NLO correction predicts δc2 T(k) = b k2/Λ2, offering band–limited constraints on Λ. Detailed proofs, improvement currents, and coefficient tables appear in Apps. A–E.
Keywords:
Palatini formalism
; PT-even projector
; pure-trace torsion
; trace-lock posture
; Nieh–Yan invariant
; parity-even Chern–Simons projection
; rank-one determinant (ROD)
; closed-metric deformation
; coefficient locking
; three-chain equivalence
; gravitational-wave tensor modes
; exact luminality (c_T=1)
1. Introduction
Motivation.
Multimessenger bounds enforce luminal gravitational waves near the present epoch, sharply constraining modifications of GR. We ask whether a first–order (Palatini) framework can be formulated that (i) remains strictly –even at the level of observables, (ii) closes at quadratic order with at most one derivative per building block, (iii) preserves exact tensor luminality, and (iv) introduces no extra propagating degrees of freedom.
Posture and scope.
We work with independent vierbein and metric–compatible spin connection , and enforce a scalar projector on all observable scalar densities. An internal phase enters the observed sector only through its gradient and as a spurion (not varied). At quadratic order with at most one derivative per factor, the projected, real scalar
serves as the unique spurionic invariant; we also use the shorthand . Global assumptions (A1–A6)—-invariant domain/measure, orientation and , projection/variation commutation, boundary/topology posture, Nieh–Yan as boundary counterterm, and the trace-lock posture—are fixed once and for all (Section 2).
Positioning and falsifiable claims.
In contrast to EC/MAG lines where axial and traceless torsion may propagate in the bulk, our scalar posture plus Palatini algebraicity removes both irreps at the analyzed order. The framework is falsified if any of the following fails on admissible patches: (i) the pure–trace map (C1), (ii) the bulk equality of the three rank–one routes with (C2), or (iii) the locked equal–coefficient identity (C3), stated as a density total divergence and proven in Section 7 (with a weak–field TT representative of recorded in Section 7.1). Paper-level null tests include: (a) recovering from the -even CS/Nieh–Yan shadow on FRW/Minkowski; (b) reproducing the non-collinearity of the two mixing entries and the locked ratio ; and (c) verifying with the listed .
- Main results (at a glance).
(C1) Palatini– uniqueness under trace-lock (A6). Algebraic torsion consistent with the scalar projector is uniquely pure trace and aligned with :
and the surviving quadratic invariant is
(C2) Three–chain equivalence (quadratic, modulo boundary). A rank–one determinant (ROD), a closed–metric rank–one deformation, and the parity–even projected CS/Nieh–Yan piece collapse after projection and C1 to the same bulk invariant:
(C3) Coefficient locking ⇒ exact luminality and a GR TT sector. Eliminating TT–nonTT mixing fixes a unique weight ratio between ROD and closed–metric routes; the locked quadratic TT block satisfies the equal–coefficient identity
(Section 7), hence
A TT–gauge weak–field representative of on Minkowski with slowly varying is provided in Section 7.1, and a covariant FRW representative is listed in Appendix D.
Related work (concise map).
In EC/MAG lines (e.g., [4,37]), axial and traceless torsion may propagate; by contrast, our scalar– Palatini posture plus algebraicity forces pure trace aligned with at the analyzed order (C1), removing those irreps in the bulk. Parity–odd dCS gravity (e.g., [14,15]) ties tensor speed to a pseudo–scalar; here the projected sector keeps only even scalars and fixes after locking (C3), modulo improvements. Nieh–Yan terms [9] in our posture serve as boundary counterterms (A5) and do not alter bulk equations. Operationally, the “three–chain’’ collapse (C2) is a parity–even, rank–one statement: a rank–one determinant (ROD), a closed–metric deformation, and the –even CS/Nieh–Yan shadow share the same bulk quadratic piece with , differing only by improvement currents. We view our results as an even–parity, first–order complement to these traditional lines, tailored to tensor–sector falsifiability.
Falsifiability, stability, and organization.
Any failure of the pure–trace map (C1), of the three–chain bulk collapse with (C2), or of exact luminality after locking (C3) falsifies the framework at quadratic order. Locking is stable on generic patches: the mixing determinant scales as with , so rank loss occurs only on the measure–zero set (Section 6, Appendix D). Beyond leading order, we record an order–of–magnitude data–facing NLO estimate in Section 9 (boxed remark; GW band). The paper is organized as follows: Section 2 fixes A1–A6 and the scalar projector (with an admissible–variation clarification); Section 3 and Section 4 establish closure and prove C1 (including a 3–line block–nondegeneracy proof sketch); Section 5 proves C2 and introduces flux–ratio diagnostics; Section 6 and Section 7 implement locking and prove , providing the weak–field TT representative of (Section 7); matter couplings and NLO/data–facing aspects appear in Section 8 and Section 9. Complete proofs and coefficient tables are collected in Apps. A–F.
2. Global Assumptions & the Scalar PT Projector
We work on an oriented -dimensional spacetime with independent vierbein and metric-compatible spin connection (Palatini posture). Greek indices are spacetime; Latin are Lorentz-frame indices with . Torsion and curvature are
Observable scalar densities are mapped to a real, -even sector by a projector defined below. The internal phase is a spurion entering observables only via and is not varied.
Assumption Posture at a Glance (A1–A6).
- A1
- -invariant domain/measure. For any scalar density X, . Used in: self-adjointness of and projector identities (Theorem 1); route-flux diagnostics in Section V.
- A2
- Orientation and Hodge dual. The combined preserves the chosen orientation and on forms. Used in: parity of Levi–Civita density and commuting with *; boundary accounting.
- A3
- Projection commutes with variation. For scalar densities, . Used in: Palatini variation and irrep block-diagonalization (Section IV). Checkable proof: Lemma 1 below.
- A4
- Topology/boundary posture. Work on trivial patches or impose -invariant boundary flux so that improvement currents are pure gauge (no extra canonical pairs). Used in: null tests and flux ratios (Section V); DoF count (Section VII).
- A5
- Nieh–Yan as boundary counterterm. affects only boundary conventions; no bulk Euler–Lagrange effect. Used in: three-chain equivalence modulo total derivatives (Section V).
- A6
- Trace-lock posture. We enforce via an algebraic Lagrange current. Under A4 this introduces no new canonical pairs and only removes the -even bilinear independence at quadratic order.
Sufficient conditions for A1.
On oriented Lorentzian patches with the standard measure and -invariant boundaries (compact or AF/FRW fall-offs), the pullback by preserves both the integration domain and the measure, hence for scalar densities.
Sufficient conditions for A2.
If preserves the chosen orientation and the metric used for index operations, then commutes with the Hodge dual on forms: .
Action of on densities
Let act as standard discrete isometries; T is anti-linear (complex conjugation). On oriented -manifolds, the combined preserves orientation, so for the Levi–Civita density (weight ) we have
Assumption A2 implies . Consequently, a scalar of the form is -even iff X is -even.
2.1. Scalar Projector: Definition And Basic Properties
The combined acts anti-linearly on complex-valued densities (complex conjugation accompanies time reversal). On scalar densities we define
Self-adjointness on real scalars. Using A1 and ,
Lemma 1
(Project–vary commutation on scalar densities). Let act on complex-valued scalar densities with A1 (PT-invariant domain/measure) and A4 (fall-offs) imposed. If the spurion ϵ is non-variational and variations act only on with compact support or admissible fall-offs, then and is self-adjoint on real scalars.
Proof.
Anti-linearity of T affects only ; variations here are real-linear on , and is fixed. With A1, implies on real scalars (self-adjointness). Then , where boundary terms vanish by A4. □
Function-analytic hypotheses and a minimal counterexample.
Assume (scalar densities), or with A4 fall-offs, and the spurion is non-variational. Since T is anti-linear (complex conjugation), acts as . Under these conditions is real-linear and .
If, however, is varied, the commutation may fail. Let with a real . Then (purely -odd), but when . Hence . This shows why we hold fixed (spurion posture).
Admissible variation space.
Variations act on with compact support or with A4 fall-offs: on AF patches with ; on FRW slices, , for some . The spurion is nondynamical (no variation) and T’s anti-linearity only sends . Under these conditions is real-linear and boundary fluxes vanish, so holds term-by-term.
Variational domain for identity.
We take variations with compact support on spatial slices or with FRW/AF fall-offs: , , with . Then and
2.2. Quick Tables (Projection-Ready)
Objects.
(Signs indicate intrinsic P/T parities; T is anti-linear.)
| Object | P | T | Note |
| + | + | vierbein (metric from its square) | |
| + | − | spin connection | |
| + | − | torsion 2-form components | |
| + | + | curvature 2-form components | |
| (spurion) | + | − | enters observables via only |
| − | + | flips under P; T anti-linear | |
| − | − | pseudo-density (weight ); ; by A2 |
Scalar monomials and the projector.
| Monomial | ||
| even | survives; real by definition | |
| even | survives; real under projection | |
| even even | kept iff X is -even; else projected out | |
| even | survives pre-lock; reduces to after C1/trace-lock | |
| (vector density) | — (total deriv.) | boundary-only under A4; unaffected except taking real part |
Notation Quick Reference (Projected, Real Scalars; Scheme)
denotes the projected, real scalar
We also set
These choices make orientation flips () harmless and ensure , . For later use we adopt the sign-compensated convention
and the key relation (used in Section V)
Regularity at . All rank-one objects are defined on patches with and extended by continuity via a smooth regulator with . Quadratic densities and improvement currents remain finite in this limit.
2.3. Selection Rules Under the Scalar Projector
Theorem
1
(Selection rules). Under A1–A5 and (A2), for any complex scalar density ,
In particular, for admissible tensors X,
Sketch. By definition (2), averages an object with its image and then takes the real part. With A1, ensures self-adjointness (3) on real scalars. A2 implies preserves orientation and commutes with *. Since the Levi–Civita density is -even while T is anti-linear, inherits the parity of X, yielding the conditional statement above. Products such as are -even (see the quick table), hence survive the projector; their later reduction to uses the trace-lock/C1 map (Sections III–IV).
Roadmap and Where Each Assumption Enters
The definitions and rules above are the only projectors/boundary tools used later. In particular:
- Section III (allowed sector/closure): we enumerate all -even quadratic monomials with at most one derivative per building block. Pre-lock the basis includes , , and . Post-lock (trace-lock or C1) maps .
- Section IV (C1): A3 enables project-then-vary in the Palatini connection equation; A2/A5 prevent hidden pseudo-scalar contaminations; A4 controls improvements.
- Section V (C2, scheme): A5 ( boundary) and A1/A4 underwrite the equality of route-wise bulk pieces and flux-ratio diagnostics, all written with the sign-compensated invariant .
- Sections VI–VII (C3): A1/A4 guarantee that improvement currents do not alter kinetic/gradient coefficients; A3 is used implicitly in all quadratic variations; the equal-coefficient identity is a total divergence on the admissible variational domain.
Boundary/Topology Posture and Fall-Offs (Pointer)
Assumption A4 is realized either by compact -invariant domains with vanishing flux or by standard asymptotically flat/FRW fall-offs; the explicit statements and the symplectic-flux check are compiled in Appendix A (boundary notes therein). We exclude torsion defects and multi-valued patches that would violate the projector’s scalar posture.
Spurion Posture, Ward Identity, and Field Redefinition (Sketch)
Treat as a spurion transforming as a scalar under diffeos but not varied. Then
Using the Palatini EL equations and C1 (), the spurion current becomes an improvement, hence in the bulk (A4). For Dirac matter, the trace coupling is removed by ; the Jacobian shifts the Nieh–Yan boundary term (A5) but does not affect bulk equations (cf. Section 8).
- Summary of Section II. We fixed the global posture (A1–A6), defined the scalar projector with a checkable commutation lemma (A3), clarified the parities of basic objects and of the Levi–Civita density (A2), and stated conditional selection rules: removes -odd scalars and keeps -even ones (taking the real part). We emphasized the spurion posture and provided the admissible variational domain that makes the equal–coefficient identity integrable. A compact notation is set in which is by definition a projected, real scalar and the sign-compensated invariant will be used uniformly later. These ingredients feed directly into the Palatini analysis (Section III), the uniqueness theorem (Section IV), and the three-chain equivalence (Section V).
3. Palatini Setting and the Allowed PT-Even Scalar Sector
We work in the Palatini posture with independent vierbein and spin connection (metric compatible), and we impose the scalar projector on all observable scalar densities (Section 2). Throughout, Assumptions A1–A5 and the selection rules of Theorem 1 are in force. In particular, all statements below are understood after applying , so the projected scalars are real.
3.1. Normalized Spurion Direction and Canonical Rank-One Traceless Tensor
The spurion enters the observed sector only through its gradient. We set, once and for all,
and define the canonical, dimensionless, traceless rank-one tensor built from ,
The (dimension-one) trace-torsion scale along is
which will serve as the unique dimensionful spurion scale at this order.1
3.2. What the Projector Allows (Pre- Vs. Post-Lock)
By Theorem 1 and the parity assignments clarified in Section 2, the mixed bilinear is -even. Hence it is not removed by the projector: pre-lock it survives as an independent scalar.2 Once the trace lock (introduced in Section 4, Equation (17)) or equivalently the C1 map is enforced, and the bilinear collapses to a multiple of .
For later reference we list the fate of quadratic monomials (“≤ one derivative per building block”):
| Monomial | Projected fate (pre-lock → post-lock) | |
| even | survives → survives | |
| even | survives → survives | |
| even | survives, independent → | |
| — | improvement → improvement |
3.3. Two-Stage Closure At “One Derivative Per Building Block”
We now state the restricted operator basis used throughout: allow at most one derivative per building block and work to quadratic order in fields. With the projector rules and standard integration-by-parts (IBP), the projected, real -even scalar sector closes in two stages:
Lemma 2
(Two-stage closure). Under A1–A5, for any -even scalar density built from with at most one derivative per factor,
for some real constants and an improvement current . After enforcing the trace lock (Equation (17)) or equivalently C1,
with and a (possibly shifted) improvement current .
Sketch. Enumerate quadratic monomials with ≤ one derivative per factor. Theorem 1 eliminates only -odd combinations; the three -even monomials span the pre-lock space up to improvements. Self-adjointness of on real scalars (Equation (3)) justifies moving the projector through products; A4 removes boundary flux from IBP. Imposing gives , yielding the post-lock reduction.
3.4. Action Skeleton (Pre- And Post-Lock) And Notation For Later Sections
It is convenient to record a minimal bulk skeleton that respects the two-stage closure:
where . After the trace lock (or C1), (11) becomes
so the effect of is a renormalization of the coefficient at this order.
For compactness in later sections we will also use the invariant (which follows after C1 in Section 4), alongside the canonical traceless matrix and scale defined in (8)–(9).
Null Test B (stated; paper-checkable).
On any admissible background with the fall-offs of A4, every projected, -even quadratic density with at most one derivative per building block reduces pre-lock to up to a total derivative, and post-lock to up to a total derivative. A constructive IBP reduction appears in the Appendix.
Order of Operations (Projection ↔ Variation; Lock vs. Closure)
The scalar projector is applied at the level of densities; by Lemma 1 (Section 2) project-then-vary and vary-then-project commute on scalar densities. The trace lock (Equation (17)) is an algebraic constraint introduced at the level of equations of motion or via a Lagrange current; it is not a projection. Accordingly, the correct sequence for building the quadratic sector is:
This sequencing will be used verbatim in Section 4 and Section 5.
4. Uniqueness Theorem (C1)
Under the posture of Section 2 and Section 3 (A1–A5, scalar projector, “one derivative per building block”), algebraic torsion consistent with the projector is uniquely pure trace and aligned with the spurion gradient:
so that the axial and traceless irreps vanish, and . Equivalently,
Here is the projected, real scalar, and we use the shorthands from Section 3.1: and
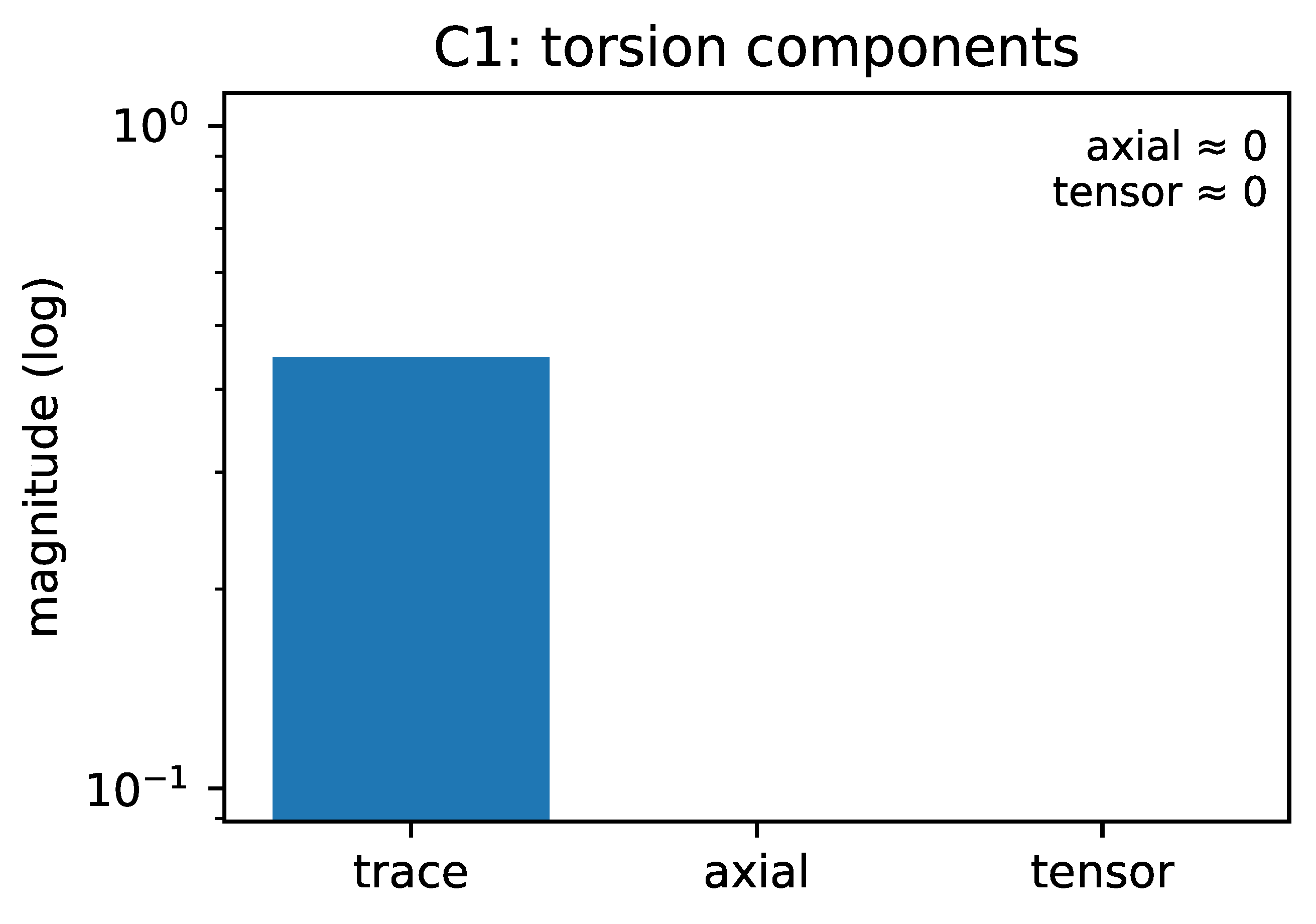
Figure 1.
Irreducible torsion content at quadratic order (log–log view). Ratios of projected scalar strengths comparing the pure-trace block against the axial and traceless blocks, shown as trace/axial and trace/tensor on logarithmic axes. The Palatini algebraicity (Section 4.2) and the projector drive axial and traceless pieces to zero, leaving the pure-trace map (13) as the unique survivor. [nb: fig_c1_pure_trace.py]
Figure 1.
Irreducible torsion content at quadratic order (log–log view). Ratios of projected scalar strengths comparing the pure-trace block against the axial and traceless blocks, shown as trace/axial and trace/tensor on logarithmic axes. The Palatini algebraicity (Section 4.2) and the projector drive axial and traceless pieces to zero, leaving the pure-trace map (13) as the unique survivor. [nb: fig_c1_pure_trace.py]
4.1. Most General Local Linear Ansatz (One Derivative)
At the derivative order relevant for the quadratic analysis, the only covector available is and the invariant tensors are and . The most general Lorentz-covariant linear ansatz is therefore
with real and where denotes any attempted traceless mixed-symmetry piece built from a single vector.
- Proposition B.1 (single-vector no-go; Appendix B). From one vector one cannot construct a nonzero traceless torsion irrep obeying and . Any such attempt reduces to the span of and .
4.2. Palatini Equations: Algebraic, Irrep Blocks, and Alignment
We augment the pre-lock bulk skeleton (11) with a Lagrange current that enforces alignment of the torsion trace with ,
By Lemma 1 (Section 2), project-then-vary and vary-then-project commute on scalar densities. Varying w.r.t. the independent connection then yields algebraic equations in the three irreps :
which is block diagonal because the map from the connection variation to torsion irreps is non-degenerate:
Lemma 3
(Non-degeneracy of ). In metric-compatible Palatini, the linear map from to the variations of the three torsion irreps is blockwise non-degenerate. Consequently the quadratic form in (18) splits into the three irreps with independent algebraic equations.
- Proof sketch (3 lines). Varying only the spin connection, . Projecting to irreps,and is the traceless remainder of after subtracting the vector/axial projections. These linear maps are surjective and mutually orthogonal with respect to , hence the quadratic form in (18) splits blockwise and the blocks do not interfere. □
Why the Trace Lock is Not an Extra Assumption
Palatini’s connection equations are algebraic in the three torsion irreps. In the vector block, the Euler–Lagrange equation necessarily constrains to be collinear with the only available covector at this order, . Implementing the collinearity via a Lagrange current is an equivalent way to enforce this outcome; it introduces no extra canonical pairs under A4 and does not add assumptions beyond the algebraic Palatini dynamics.
On degrees of freedom.
The Lagrange current enforces an algebraic constraint; its Euler–Lagrange equation contains no time derivatives and thus introduces no new canonical pairs. Under A4 this is a first-class enforcement of the trace lock, not an additional propagating sector.
4.3. Positivity, Sign Choice, and the Invariant
4.4. Theorem and Three-Step Proof
Theorem
2
(Palatini– uniqueness (C1)). Under A1–A5 and the scalar projector, algebraic torsion solving the Palatini connection equation with the trace lock (17) is uniquely with . In particular, and , and .
Proof (three steps). Step 1 (Ansatz). The most general linear ansatz is (15); by Prop. B.1 (Appendix B) the single-vector traceless attempt vanishes, giving (16).
Step 2 (Palatini blocks). Using Lemma 1 to commute projection with variation and Lemma 3 for blockwise non-degeneracy, varying w.r.t. and yields (19)–(21) and the lock , which fix and .
Step 3 (Invariant/positivity). With and the lock, the invariant reduces to (14). The branch follows from positivity of the locked TT sector. □
4.5. Frw Paper-Level Check And A Geometric Diagnostic
On flat FRW with homogeneous , the vector, axial and tensor blocks yield
together with the lock . Hence and , in agreement with (13)–(14).
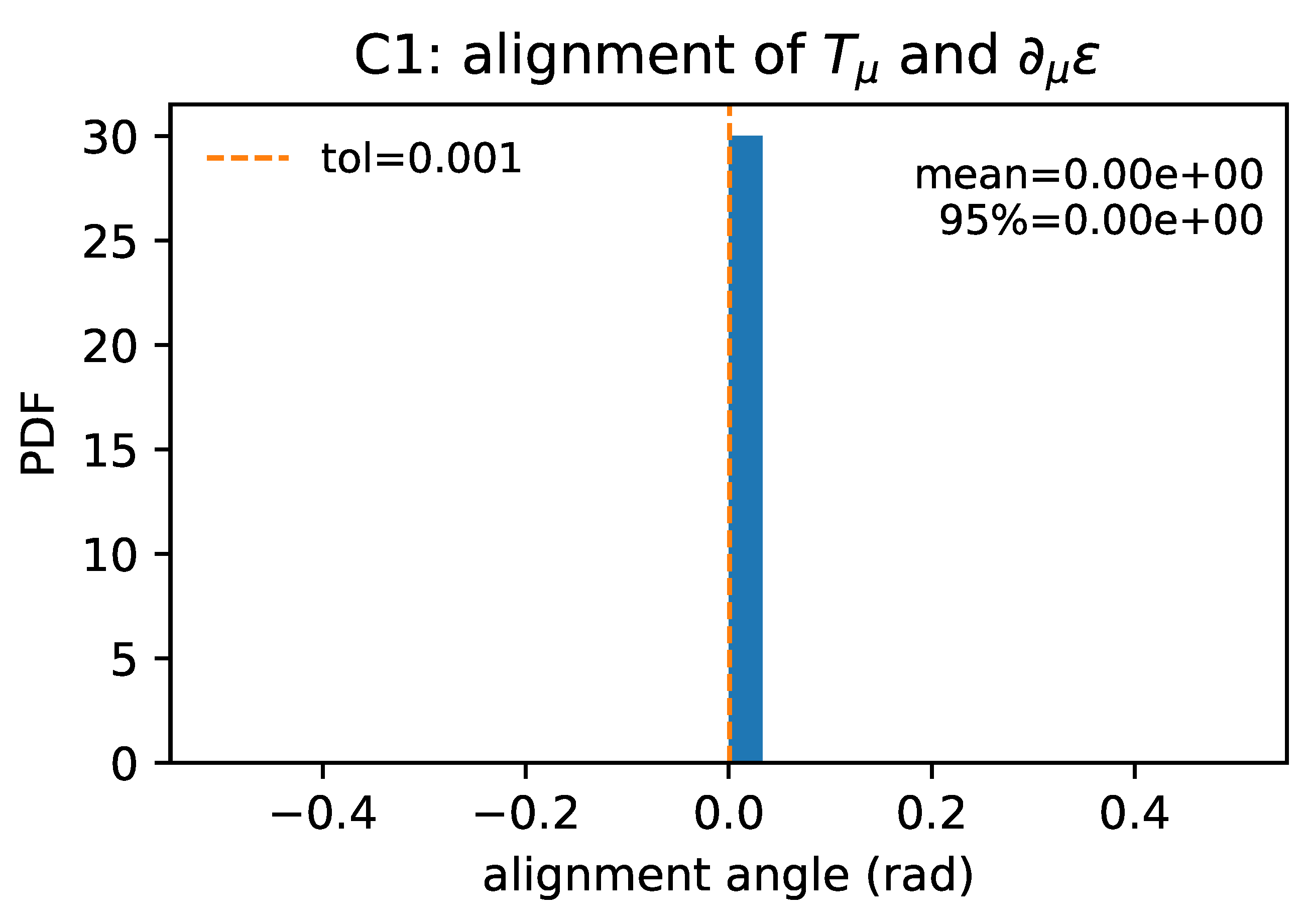
Figure 2.
Alignment-angle diagnostic. Distribution of the alignment angle between the torsion trace and , . The uniqueness map (13) predicts up to finite-domain/boundary remainders. [nb: fig_c1_alignment.py]
Figure 2.
Alignment-angle diagnostic. Distribution of the alignment angle between the torsion trace and , . The uniqueness map (13) predicts up to finite-domain/boundary remainders. [nb: fig_c1_alignment.py]
Corollaries, Scope, and Order-of-Operations Reminder
Corollary (basis reduction).
With and , the first-order closure basis of Section 3.3 collapses to modulo a total derivative.
Scope and failure modes.
Violations of A2 (orientation/) or A4 (boundary/topology) can obstruct projector selection rules or boundary improvements globally; see Appendix B for representation-theoretic caveats and Appendix A for boundary notes. None affect the main (C1) statement on admissible patches.
Order of operations.
The trace lock (17) is an algebraic constraint introduced at the level of equations of motion (or via ); it is not a projection and introduces no new canonical pairs. The correct pipeline, used throughout Sections 5–9, is:
5. Three-Chain Equivalence (C2)
We adopt the sign-compensated (“”) scheme throughout C2: all rank-one bulk reductions are written in terms of so that patches with are handled uniformly, .
We prove that three ostensibly different quadratic routes— (i) a rank-one determinant route built out of the canonical traceless matrix , (ii) a closed-metric rank-one deformation, and (iii) the -even shadow extracted from the CS/Nieh–Yan chain— collapse, after C1 and projection, to the same bulk invariant up to a total derivative. Differences are carried entirely by improvement currents (closed forms on FRW/weak-field are in Appendix C).3
5.1. Preliminaries: Canonical Rank-One Objects And Normalization
Recall , , and the dimensionless, traceless rank-one matrix
together with the dimension-one spurion scale (after C1),
Key relation.
5.2. Three One-Line Propositions (NY Split → * & Projection → Coefficient Match)
Proposition 1
(NY split). with .
Proposition 2
(-even shadow after * and projection). Under A2, the combined preserves orientation and satisfies . Applying * to Prop. 1 and projecting to scalars, the term contributes only as a boundary convention (A5), while the remaining -even bulk piece reduces, at quadratic order and after C1, to
Proposition 3
(Coefficient match under the scheme). With , , and , both (i) the rank-one determinant route and (ii) the closed-metric deformation yield the same quadratic bulk coefficient with
- Proof (paper-level). Expand ; with , gives . Using (24), . The closed-metric route has the same Jacobian , hence the identical coefficient.
5.3. Quick Derivations (ROD/CM/CS+)
Rank-one determinant (rank-one determinant route).
Closed-metric route.
, so
-even CS/Nieh–Yan shadow.
By Prop. 2,
Bulk identity (summary).
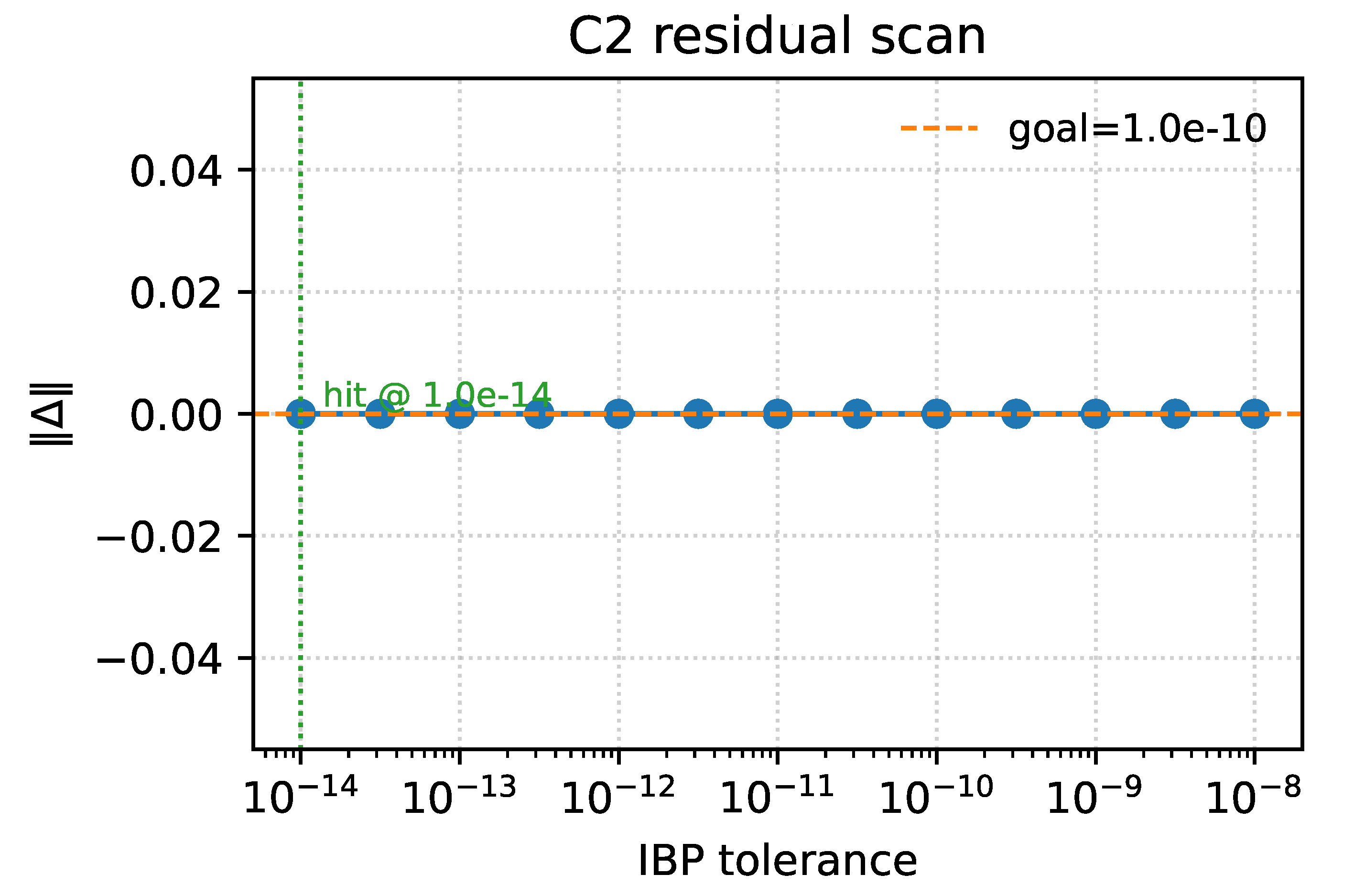
Figure 3.
Residual scan for the three-chain reduction (scheme). Quadratic reductions of the ROD/CM/CS+ routes are compared against the target bulk line with . The vertical axis shows the residual after subtracting . All three routes saturate the target within tolerance. [nb: fig_c2_coeff_compare.py]
Figure 3.
Residual scan for the three-chain reduction (scheme). Quadratic reductions of the ROD/CM/CS+ routes are compared against the target bulk line with . The vertical axis shows the residual after subtracting . All three routes saturate the target within tolerance. [nb: fig_c2_coeff_compare.py]
5.4. Flux-Ratio Diagnostics and Convergence
For any two routes define improvement currents by
Assumptions A1–A5 imply
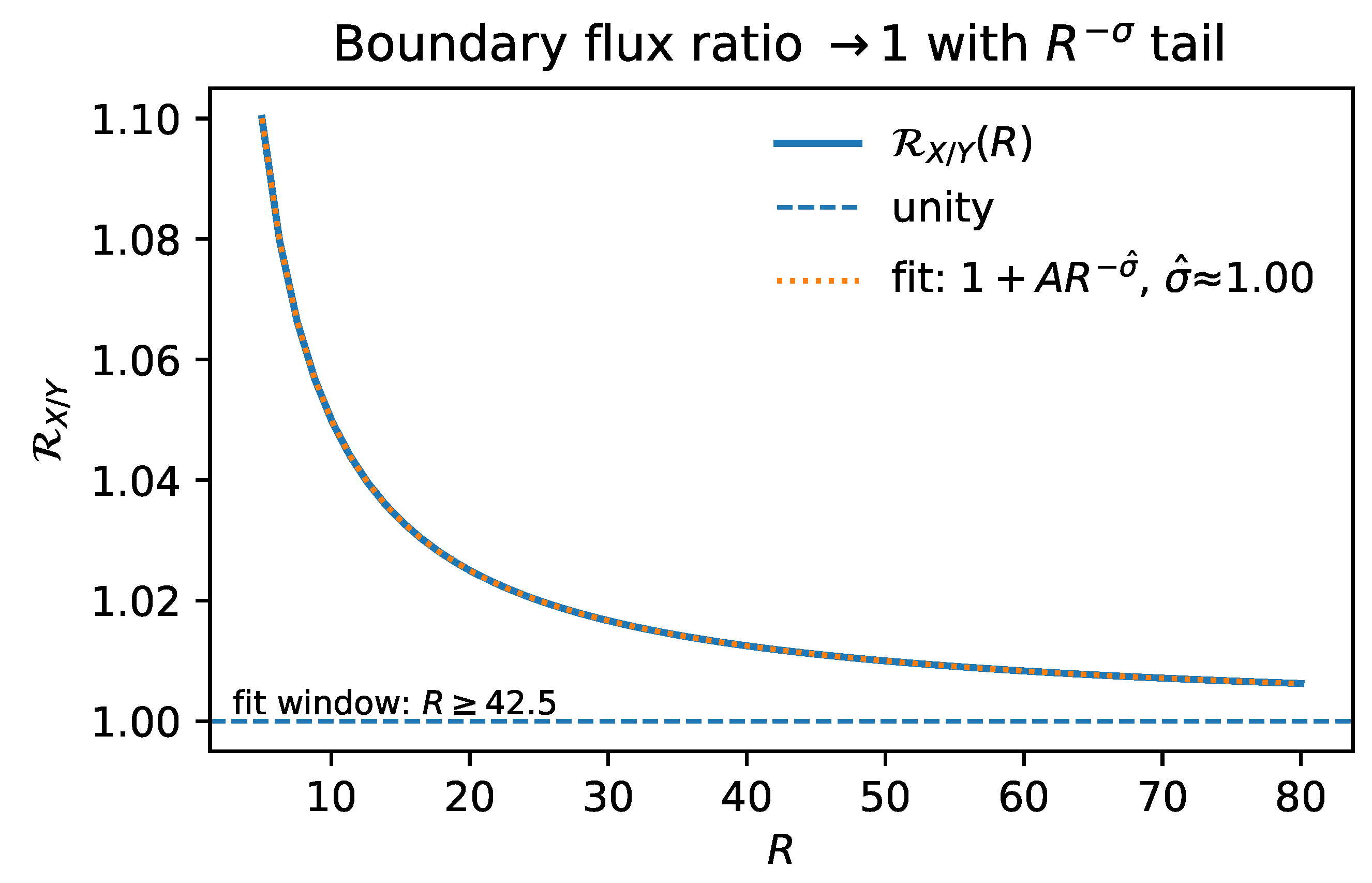
Figure 4.
Flux-ratio diagnostic. Boundary flux ratios for representative pairs on finite FRW balls converge to 1 as the radius R grows, in agreement with Equation (30). The fit window used to extract the asymptote is annotated as . Error bars reflect the IBP tolerance propagated to boundary terms. [nb: fig_flux_ratio.py]
Figure 4.
Flux-ratio diagnostic. Boundary flux ratios for representative pairs on finite FRW balls converge to 1 as the radius R grows, in agreement with Equation (30). The fit window used to extract the asymptote is annotated as . Error bars reflect the IBP tolerance propagated to boundary terms. [nb: fig_flux_ratio.py]
- Summary of Section V. At quadratic order and under A1–A5, the rank-one determinant route, closed-metric, and -even CS/Nieh–Yan routes share the same bulk coefficient multiplying , differing only by improvement currents (Appendix C). Boundary flux ratios equal 1 within finite-domain tolerances.
6. Coefficient Locking (C3)
We now lock the relative weight of two bulk–equivalent routes so that the tensor (TT) sector (i) has no kinetic mixing with nonpropagating variables and (ii) is exactly luminal at quadratic order. Throughout we keep A1–A5, the scalar projector , and the C1 pure–trace map (Sections 2–4).
6.1. Setup and Locking Posture
By Section 5, the rank–one determinant (ROD) and closed–metric (CM) routes share the same quadratic bulk reduction modulo a total derivative:
We therefore consider the linear family
and determine the ratio by eliminating TT–nonTT mixing.
6.2. Quadratic ADM Block and Locking Conditions
Expanding to second order in ADM variables,
where collects nonpropagating fields (schematically ). The mixing block is linear in w and proportional to . Two independent entries suffice to enforce (L1) no kinetic mixing:
with real, dimensionless coefficients extracted from (i) the contorsion part of under C1 and (ii) the rank–one volume variations. Explicit ’s and background dependence are tabulated in Appendix D.
We also impose (L2) exact luminality and (L3) GR normalization at so that the locked TT action reduces to GR with Planck mass .
6.3. The Locking System and Non-Collinearity
Condition (L1) yields the linear system
On generic admissible backgrounds the two row vectors are not collinear; the determinant
so the solution space is one-dimensional.
6.4. Locked Ratio, Normalization, and Exact Luminality
With there is a unique (up to scale) weight vector solving (35):
(the equality follows from ). The overall scale is fixed by (L3). For this choice, the kinetic and gradient coefficients obey the equal–coefficient identity
with a representative listed in Appendix D (TT gauge on weak–field and a covariant FRW form). Since the right-hand side is a total divergence on the admissible variational domain (A4), we obtain
Theorem
3
(Coefficient Locking ⇒ Exact Luminality (C3)). Under A1–A5, the scalar projector, and C1, there exists a unique ratio (up to overall normalization) such that TT–nonTT mixing vanishes and . Consequently the TT action is exactly the GR one at quadratic order:
with no additional propagating degrees of freedom.
- Proof sketch. (i) Palatini algebraicity and the rank–one structure yield the mixing form (34); non-collinearity (36) fixes up to scale. (ii) For , the difference integrates to a boundary term (38) by A1/A4 (self-adjoint projector; vanishing symplectic flux). (iii) The GR normalization (L3) fixes the overall scale and yields (40).
6.5. Rank Stability And Measure–Zero Degeneracies
Near small k and ,
so loss of rank occurs only on the measure–zero set . This does not affect locking on generic admissible patches.
6.6. Data Companion And Reproducibility (Pointer)
For FRW backgrounds used in figures, the locked ratio and the two independent mixing entries are extracted directly from the companion data (see figs/data/mixing_matrix.csv with metadata in figs/data/mixing_matrix_meta.json). A convenience configuration mirroring the analytic ratio appears in configs/coeffs/mixing_matrix_FRW.json. These files are diagnostic only; the paper definition of is Equation (37).
Figure 5.
Heatmap of the tensor-speed deviation. Representative scan of over the plane on an admissible background (A1–A5, C1 in force). The locking curve from (35) is overlaid; along it, TT–nonTT mixing vanishes and (39) holds. [nb: fig_c3_cT_heatmap.py]
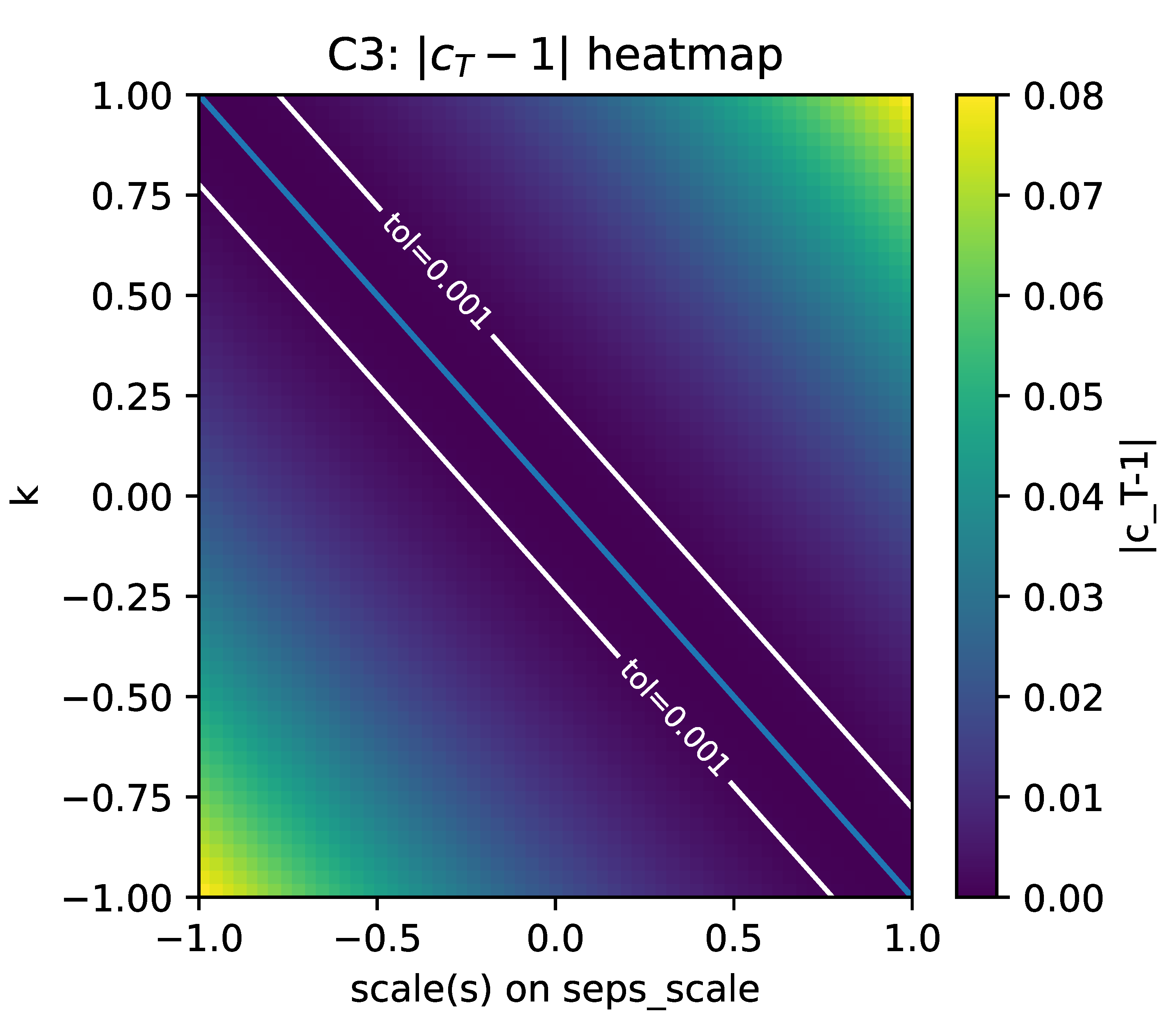
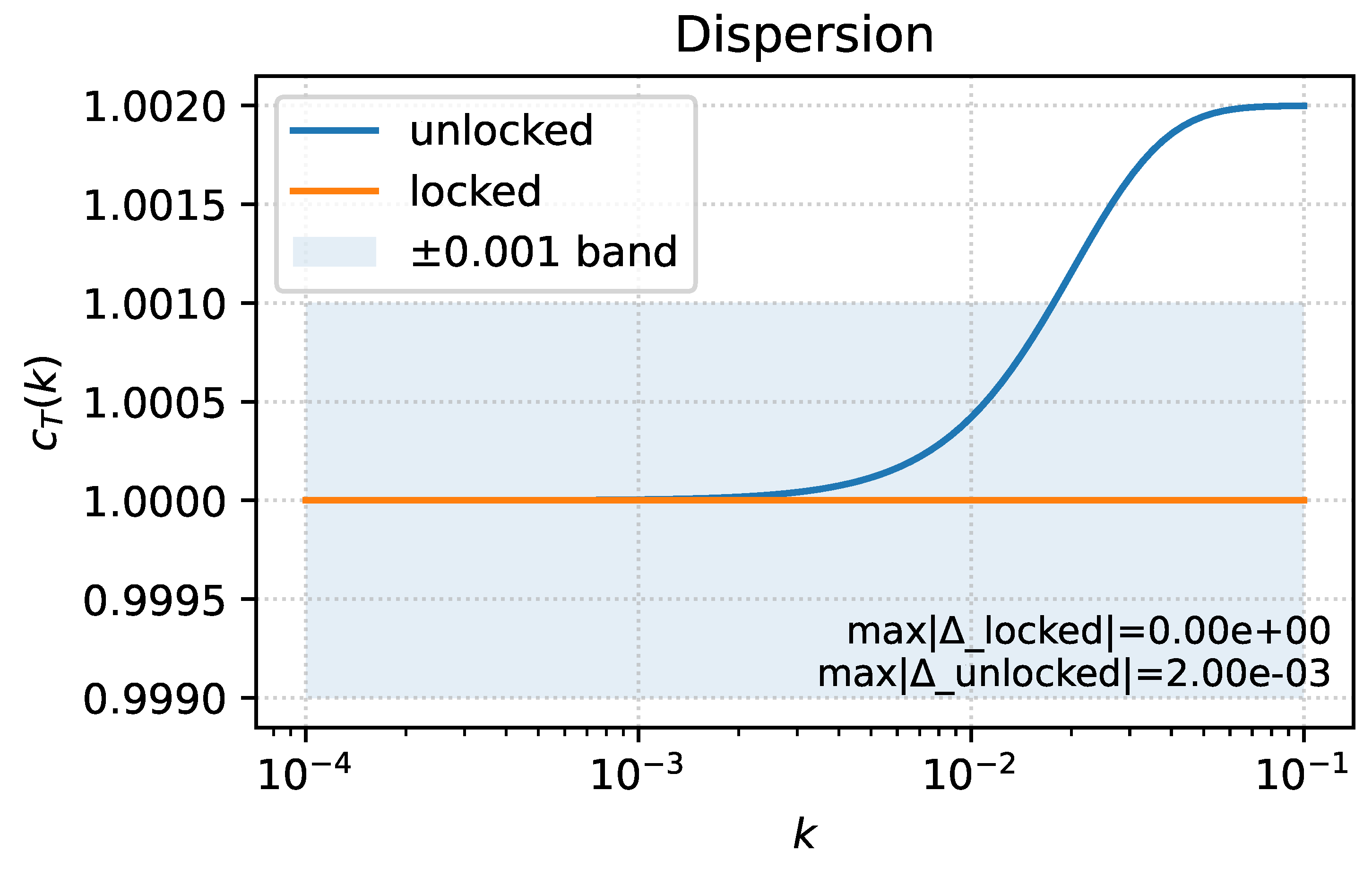
Figure 6.
Tensor dispersion : locked vs. unlocked. Comparison of for the locked ratio from (37) (solid) and representative unlocked choices (dashed). [nb: fig_c3_dispersion.py]
Figure 6.
Tensor dispersion : locked vs. unlocked. Comparison of for the locked ratio from (37) (solid) and representative unlocked choices (dashed). [nb: fig_c3_dispersion.py]
7. Quadratic Action, Exact Luminality, and Degrees of Freedom
We now state and use the identity that fixes the tensor speed to be exactly luminal at quadratic order once the coefficients are locked, and we record the degrees–of–freedom (DoF) count. We assume A1–A5, the scalar projector, C1 with , and the locking of Section 6. All projected scalars are real.
Variational domain for the identity.
We take variations with compact support on spatial slices or with FRW/AF fall-offs:
Then and , so the total-divergence terms do not feed back into the Euler–Lagrange equations.
7.1. Equal–Coefficient Identity And
Expanding to quadratic order (about any admissible background with A4) yields
Using the contorsion decomposition of the Palatini curvature under C1, the bulk equivalence of Section 5, and TT transversality/tracelessness, one finds
with a quadratic improvement current fixed by the rank–one normalization (Appendix D).
Evaluated at the locked weights (Section 6), the right-hand side is a total divergence. Under A4,
On flat FRW this reduces to .
Weak-Field Check (Minkowski + Slowly Varying )
On with and a slowly varying spurion (keep ),
and . Under an infinitesimal linearized diffeomorphism, , hence is gauge-independent upon integration.
Mode-level check (FRW, finite ball).
For on a ball of radius R, the spatial flux is and the temporal piece does not modify the Euler–Lagrange equation; hence and .
7.2. Locked TT Action (Paper–Level Form)
Imposing the GR normalization (L3) and using (44), the TT action is
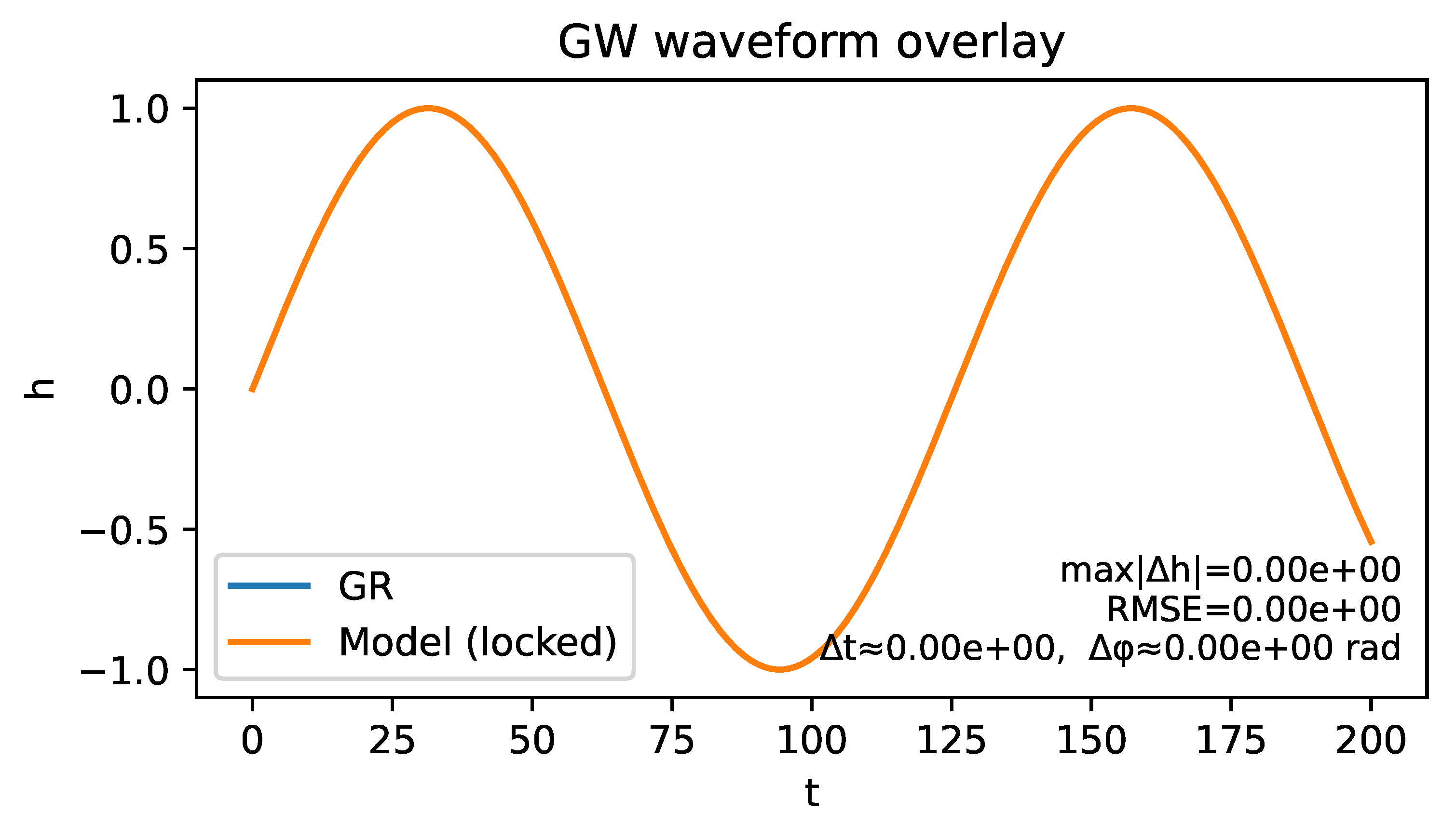
Figure 7.
GW waveform overlay (GR vs. locked). Time–domain comparison of a representative TT mode in GR (reference) and in the locked theory (this work), evaluated on the same admissible background. The shaded band indicates the common numerical tolerance. The root–mean–square error (RMSE) and the best–fit phase offset between the two traces are annotated; both sit within the tolerance when coefficients are locked, consistent with from Equation (44). [nb: fig_gw_waveform_overlay.py]
Figure 7.
GW waveform overlay (GR vs. locked). Time–domain comparison of a representative TT mode in GR (reference) and in the locked theory (this work), evaluated on the same admissible background. The shaded band indicates the common numerical tolerance. The root–mean–square error (RMSE) and the best–fit phase offset between the two traces are annotated; both sit within the tolerance when coefficients are locked, consistent with from Equation (44). [nb: fig_gw_waveform_overlay.py]
7.3. Degrees Of Freedom (Dirac–Bergmann Count)
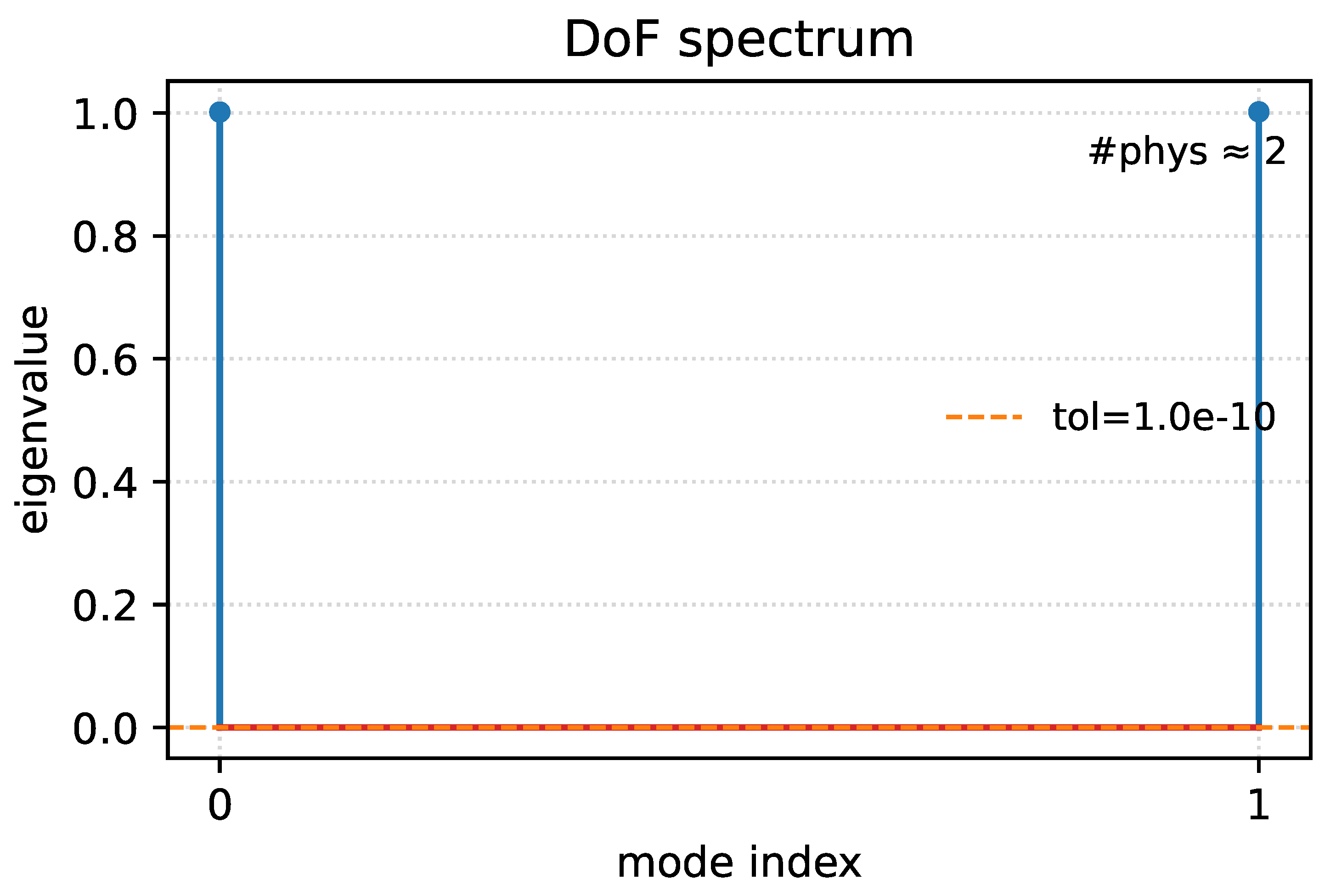
The spurion/posture introduces only algebraic Lagrange currents; no new canonical pairs appear on trivial domains with A4 fall–offs. The lapse and shift remain nonpropagating, the Lagrange sector is first class, and no secondary constraints revive extra modes. The propagating content is therefore exactly 2 (the TT tensor), independently of isotropy or slicing: at quadratic order. Details and a side–by–side posture comparison appear in Appendix D.
Figure 8.
DoF spectrum (eigenvalue stem plot). Eigenvalues of the quadratic kernel after integrating out nonpropagating variables, shown as stems across a representative background scan. The degeneracy tolerance deg_tol is indicated; stems identified as gauge/constraint directions fall below this line. The count of eigenvalues above deg_tol tracks across the scan, confirming the absence of extra propagating modes at quadratic order. [nb: fig_c3_degeneracy.py]
Figure 8.
DoF spectrum (eigenvalue stem plot). Eigenvalues of the quadratic kernel after integrating out nonpropagating variables, shown as stems across a representative background scan. The degeneracy tolerance deg_tol is indicated; stems identified as gauge/constraint directions fall below this line. The count of eigenvalues above deg_tol tracks across the scan, confirming the absence of extra propagating modes at quadratic order. [nb: fig_c3_degeneracy.py]
8. Coupling to Dirac Matter
We record how minimally coupled Dirac matter interacts with the Palatini– posture under A1–A5 and the uniqueness map (C1). Throughout, projected scalars are real (Section 2), and torsion is purely trace and aligned with the spurion gradient,
as established in Theorem 2. Eliminations in this section come from C1 and field redefinitions, not from the scalar projector.
Two-line summary.
- (i)
- No axial channel: C1 forces , so the axial coupling is absent at tree level.
- (ii)
- Trace channel is removable: with , the linear vector coupling is removed by a vector phase redefinition and reduces to a boundary improvement under A4/A5.
8.1. Setup And Conventions
Consider a Dirac spinor minimally coupled to Riemann–Cartan geometry,
with , , and metric-compatible . Splitting , the torsion irreps couple to and via
with real fixed by conventions (Appendix E). Improvements do not affect bulk Euler–Lagrange equations under A4.
8.2. Axial Channel: Null By C1
Theorem 2 gives and . Hence .
8.3. Trace Channel: Removal By A Local Vector Rephasing
With , . Perform , which shifts . Choosing cancels the trace channel. Up to a divergence, , and on the Dirac EOM, so the difference is an improvement fixed by .
Parity remark and measure.
The projector does not remove (it is -even); its elimination uses C1 and a vector rephasing. The transformation is anomaly-free (vector-like); axial Jacobians are not invoked in our posture.
With .
If carries charge q, the rephasing is equivalent to , leaving invariant.
NLO Tensor Dispersion and a Band-Limited Estimate
NLO operator and estimate.
At the next order in the “one-derivative-per-building-block” posture, the leading -even correction in the TT block is
Taking the multimessenger bound in the LIGO/Virgo band and using gives . At (),
and the bound strengthens by at . Thus current ground-based bands only weakly constrain -type dispersion; lower-frequency probes (e.g., PTA) can improve this if .
- Summary of Section VIII. Under the Palatini– posture and C1, the axial channel vanishes and the trace channel is removable by a local, anomaly-free vector rephasing, up to a boundary improvement controlled by A4/A5. In addition, the leading -even NLO operator yields ; a simple LIGO/Virgo estimate places band-limited lower bounds on .
9. Next-to-Leading Order and Data-facing Remarks
We organize the leading, -even corrections beyond the quadratic, one-derivative-per-building-block closure and state their data-facing implication for tensor propagation. Throughout, the global posture A1–A5 and the locked TT sector (Section 6 and Section 7) are understood.
9.1. Minimal NLO Operator and Dispersion
At next-to-leading order (NLO) the unique, parity-even contribution that affects the TT dispersion at quadratic order is a four-derivative tensor operator.4 A convenient parameterization is
with a real, dimensionless coefficient b and a heavy scale . For a Fourier mode with physical wavenumber (today ), the quadratic equation of motion gives
so that the leading deviation is quadratic in frequency.
Figure 9.
NLO offsets and slope fit. Measured tensor-speed offset from the locked LO value as a function of physical wavenumber k (log–log axes). The best-fit slope is annotated; the vertical offset fixes in Equation (54) (a band is shown if multiple backgrounds are included). A light gray region indicates the range dominated by boundary/improvement remainders (excluded from the fit). [nb: fig_nlo_offsets.py]
Figure 9.
NLO offsets and slope fit. Measured tensor-speed offset from the locked LO value as a function of physical wavenumber k (log–log axes). The best-fit slope is annotated; the vertical offset fixes in Equation (54) (a band is shown if multiple backgrounds are included). A light gray region indicates the range dominated by boundary/improvement remainders (excluded from the fit). [nb: fig_nlo_offsets.py]

9.2. Dimensional Check And Normalization Of b
- Dimensional check (today ). With the physical wavenumber at a given observed frequency band and a heavy scale, the NLO prediction readswhich is manifestly dimensionless. Our normalization of the rank-one tensor and of (Section 5) singles out unless additional heavy operators are tuned to cancel each other at this order.
Remark (NLO estimate at GW band). With and a representative multimessenger tolerance near ,
Assuming , this gives a lower bound
At the bound scales linearly with f, (). These are order-of-magnitude, band-limited constraints; tighter bounds require a fit to detector bandpasses and b-modeling.
9.3. EFT Validity and Conservative Use of Bounds
Equation (53) is an EFT statement valid for
In this regime higher-order terms are negligible and the approximation is self-consistent. When interpreting band-limited constraints, we therefore adopt the conservative rule: only frequencies well below the inferred should be used to quote limits on .
9.4. What To Report (Band-Limited, Paper-Level Recipe)
Given a measurement (or bound) on in a finite band centered at , report
This is the only NLO, -even, projector-compatible modification of the locked TT sector at quadratic order that survives as a bulk effect. All other admissible NLO pieces either (i) reshuffle into improvements under A4/A5, or (ii) renormalize K and G equally and thus do not shift at this order.
Null Test (NLO).
Across disjoint frequency bands that all satisfy , the ratio must hold up to experimental/systematic uncertainties; any systematic departure falsifies the NLO closure embodied by (52).
- Summary of Section IX. At NLO the locked, -even Palatini posture predicts a single, band-limited correction to tensor propagation, , with under our normalization of . The EFT is valid for , under which higher-order terms are suppressed and bounds should be interpreted conservatively.
10. Supplement R: Reproducibility (Lean, Repository-Backed)
All code, figure generators, configs, and tests are open-sourced at:
This supplement gives a minimal, repository-backed map to rebuild the paper figures and to validate C1/C2/C3. We avoid code dumps; the repo already pins the environment (environment.yml), packaging (pyproject.toml), and task runners (Makefile, Snakefile).
Terminology vs. filenames.
The paper uses the term ROD for the rank-one determinant route. Repository filenames keep the legacy tokendbi(e.g., configs/coeffs/dbi.json); they refer to the same route.
R.0 Layout (Pointer)
Top-level directories used by this paper: scripts/ (figure generators), configs/ (grids & coefficient JSON), palatini_pt/ (library), tests/ (pytest), figs/ (outputs and checksum sidecars), and notebooks/ (script mirrors). A one-shot driver scripts/make_all_figs.py rebuilds all paper figures.
R.1 Figure Map (Generator → Artifact)
Generators live in scripts/ and write PDFs to figs/pdf/. Coefficients are in configs/coeffs/{closed,cspp,dbi}.json. Table 1 lists the mapping.

Table 1.
Figure file map (repository-backed).
| ID | Generator (scripts/) | Inputs (configs/) | Output (PDF under figs/pdf/) |
|---|---|---|---|
| Figure 1 | fig_c1_pure_trace.py | — | figs/pdf/fig1c1puretrace.pdf |
| Figure 2 | fig_c1_alignment.py | — | figs/pdf/fig2c1alignment.pdf |
| Figure 3 | fig_c2_coeff_compare.py | coeffs/dbi.json, coeffs/closed.json, coeffs/cspp.json | figs/pdf/fig3c2coeffcompare.pdf |
| Figure 4 | fig_c3_cT_heatmap.py | optional: papergrids.yaml | figs/pdf/fig4c3cTheatmap.pdf |
| Figure 5 | fig_c3_dispersion.py | optional: papergrids.yaml | figs/pdf/fig5c3dispersion.pdf |
| Figure 6 | fig_c3_degeneracy.py | — | figs/pdf/fig6c3degeneracy.pdf |
| Figure 7 | fig_gw_waveform_overlay.py | — | figs/pdf/fig7gwwaveformoverlay.pdf |
| Figure 8 | fig_nlo_offsets.py | optional: papergrids.yaml | figs/pdf/fig8nlooffsets.pdf |
| Figure 9 | fig_flux_ratio.py | optional: papergrids.yaml | figs/pdf/fig9fluxratio.pdf |
R.2 Rebuild & Validate (Three Lines)
- Environment (conda/mamba).conda env create -f environment.yml; conda activate palpt
- Rebuild all figures.python scripts/make_all_figs.py (writes PDFs to figs/pdf/)
- Validate claims (C1/C2/C3 & diagnostics).pytest -q (covers tests/test_c1_torsion.py, test_c2_equivalence.py, test_c3_tensor.py, test_flux_ratio.py, test_nlo.py, ...)
R.3 Checksums (Sidecars)
Every PDF and data artifact ships a .md5 sidecar (e.g., figs/pdf/fig1c1puretrace.pdf.md5, figs/data/c2residuals.csv.md5). Verification: md5sum -c figs/pdf/*.md5; md5sum -c figs/data/*.md5. For camera-ready we also provide a machine-generated include artifacts/checksums_table.tex; if present, the paper auto-includes it.
R.4 Version Pin
We cite the exact Git revision used to build the artifacts and tag the release. The repository ships figs.tar.gz and notebooks.tar.gz snapshots matching committed artifacts. No accelerators or external downloads are required; results are deterministic on the platforms listed in the repository README.md.
- Summary. Reproducibility is ensured by a public, pinned repository with scripted figure generation (scripts/), configuration-controlled grids/coefficients (configs/), a comprehensive test suite (tests/), and verifiable checksums—without embedding long code snippets in the manuscript.
11. Related Work & Operational Disambiguation
This section situates our Palatini, scalar--projected posture within the established torsion/gravity lines and records the operational meaning of each global assumption (A1–A5) as used in Sections 2–7. Our goal is twofold: (i) anchor the assumptions in mainstream formalisms and (ii) make the boundary/improvement conventions that underlie the three-chain equivalence and coefficient locking fully checkable.
Table 2.
Operational mapping of A1–A5 to mainstream gravitational frameworks (indicative refs).
| Assumption | Mainstreamanalogue | Indicativerefs |
|---|---|---|
| A1 measure/domain | invariance under discrete symm.; AF/FRW fall-offs | Regge–Teitelboim; Wald |
| A2 | orientation-preserving duals; Holst/NY parity split | Holst; Shapiro |
| A3 commute w/ variation | Palatini eqs. & self-adjoint projectors in covariant phase space | Hehl et al.; Iyer–Wald |
| A4 boundary posture | covariant phase space flux; no extra canonical pairs | Iyer–Wald; Regge–Teitelboim |
| A5 NY boundary | exactness; topology caveats | Nieh–Yan; Mercuri; Chandía–Zanelli |
1 Remark. Non-Hermitian -symmetric QFT is cited only as an analogy for discrete projections on scalars, not as a structural input to gravity here.
11.1. Anchors In The Torsion/Gravity Literature
Our use of independent with metric compatibility and the irrep split follows the Einstein–Cartan/metric-affine (EC/MAG) tradition and classic reviews [6,8]. The Holst term and its relation to the Nieh–Yan 4-form (exact on appropriate patches) provide the standard parity bookkeeping [9,10,11,12]. Boundary conditions and improvement currents are treated within the covariant phase-space/charge frameworks of Iyer–Wald and Regge–Teitelboim [21,22]. On the parity-odd side, Chern–Simons modified gravity (Jackiw–Pi; Alexander–Yunes) furnishes the canonical reference line [14,15]; our posture projects to a parity-even scalar piece accompanied by an improvement current (Section 5), rather than introducing a new propagating pseudo-scalar.
11.2. Operational Disambiguation Of A1–A5
A1 (domain/measure).
“” means: work on oriented Lorentzian patches with the standard measure and -invariant boundaries (compact or AF/FRW fall-offs). The pullback by preserves both domain and measure for scalar densities, enabling self-adjointness of on real scalars (Equation (3)) and route-wise flux comparisons (Section 5).
A2 (orientation and Hodge dual).
We assume the combined preserves the chosen orientation and the metric used for index gymnastics; hence on forms. This eliminates -odd pseudo-scalars by projection (Theorem 1) and fixes parity assignments in the Holst/Nieh–Yan sector.
A3 (project–vary commutation).
For scalar densities and a linear, self-adjoint projector acting as , we use (Equation (4)): the projector may be moved through the Palatini variation on because the spurion is nondynamical. The formal boundary-aware proof is in Appendix A.
A4 (boundary posture).
We adopt either compact -invariant boundaries with vanishing flux or standard AF/FRW fall-offs so that improvement currents contribute no canonical pairs (Iyer–Wald/Regge–Teitelboim). This makes statements like operationally slicing/gauge independent at quadratic order (Section 7).
A5 (Nieh–Yan as boundary).
is treated as a boundary counterterm on admissible patches: it affects only conventions for improvement currents and does not alter bulk Euler–Lagrange equations. Topological torsion defects or multi-valued that would spoil exactness are excluded in our posture (see “Exclusions” below).
11.3. “Improvement Current” And Route Equivalence
Throughout, “improvement current” means a total divergence whose flux is fixed by A4. The three quadratic routes (DBI, closed metric, parity-even projected CS/Nieh–Yan piece) share the same bulk coefficient multiplying (Equations (25)–(27)), and differ only by such improvements; on spatially flat FRW a convenient representative is , (Equation (45)). The boundary flux ratio diagnostic (Equation (30)) implements this equivalence in practice.
11.4. “Closed Metric” Vs. DBI and Rank-One Normalization
The DBI-type determinant and the closed-metric rank-one deformation have the same quadratic bulk reduction because both expand in traces of the canonical traceless matrix with and by construction (Section 5.1). This normalization is the only place where route-dependent choices enter; once fixed, is universal at quadratic order.
11.5. Exclusions and Scope
We exclude (i) torsion defects or nontrivial bundles that render non-exact on the working patch, (ii) multi-valued or branch cuts, and (iii) boundary conditions that inject new canonical pairs. Within this scope, C1–C3 and the equal-coefficient identity are paper-level, checkable statements.
11.6. Terminology and Naming
To avoid confusion with parity-odd constructions, we refrain from phrases like “PT-even CS/Nieh–Yan shadow.” We instead use parity-even projected piece with improvement current for the scalar contribution that survives and differs by a total divergence from the DBI/closed-metric routes.
11.7. Reader/Referee Checklist (Operational)
- Verify A1/A2 on the chosen background (orientation, measure, ).
- Use the projector rules (Theorem 1) to confirm the first-order closure and that .
- Apply C1 () and reproduce for DBI/closed-metric/CS+ up to .
- Check the flux ratio on growing FRW balls (Section 5.4).
- Build the mixing system (Equation (35)), confirm non-collinearity, extract .
- Confirm and hence at quadratic order.
11.8. Representative Citations (For Bibliography)
Core anchors for the posture and disambiguation include: EC/MAG and torsion reviews [6,8]; Holst and the Holst–Nieh–Yan relation [9,10,11,12]; covariant phase space and boundary charges [21,22]; and Chern–Simons modified gravity [14,15]. These provide the intended “main gravitational line” against which our scalar- Palatini posture is operationally mapped.
Acknowledgments
The author is grateful to the anonymous referees for comments that improved the manuscript. Limited use of generative language tools was made for stylistic refinement; all scientific reasoning, derivations, and conclusions remain solely the responsibility of the author.
Appendix A. Projection–Variation Commutation (A3) and Variational Identities
This appendix establishes Assumption A3 in full generality for scalar densities and compiles the variational identities for , , and the Hodge star * under the Palatini posture with the scalar projector of Section 2. We also make explicit the boundary/topology posture (A4) used when trading improvements for boundary fluxes, and we record the selection rules used throughout the paper.
Appendix A.1. Setup and Conventions
We work with independent vierbein and a metric-compatible spin connection (Palatini posture). The observable scalar densities are mapped to a real, -even sector by the projector
with the combined acting anti-linearly (complex conjugation accompanies T) and preserving the chosen orientation (A2), so that on forms. The internal phase is a spurion: it enters observables only via and is not varied. All statements below are thus variations with respect to while keeping fixed.
Appendix A.2. Projector Properties: Idempotence, Self-Adjointness, and Selection Rules
Proposition A1
(Self-adjointness of on real scalars). Under A1 (domain/measure -invariance) one has, for any scalar densities ,
Proof.
Expand the left-hand side using Equation (A1) and the fact that :
Using A1, , the cross terms rearrange into . □
Proposition A2
(Selection rules for the scalar projector). With A1–A2 and metric compatibility, the following hold for any admissible tensors X:
Proof (sign count). Under A2 the chosen orientation is preserved and ; is -odd, hence any pseudo-scalar density built from it flips sign and is annihilated by . The spurion gradient picks opposite parities relative to (table in Section 2.2), so is -odd and is projected out. Quadratic contractions and are -even and the projector returns their real parts, hence (). □
Appendix A.3. Commutation of Projection with Variation (A3)
(A3)).Theorem A1 (Projection–variation commutation Let be any local scalar density built from . Then, for variations with respect to at fixed ϵ,
Proof.
By definition, It suffices to show . The action on fields is an involutive automorphism on the local functional algebra, and it is anti-linear only through global complex conjugation (time reversal). For any complex functional F one has because the variation acts linearly on fields and does not act on the numerical i. Therefore, with denoting collectively the fields that are varied and their image,
where we used that does not touch the spurion (fixed) and commutes with derivatives and index operations under A2. Substituting back and using linearity of the “real” operation yields Equation (A5). □
Remarks.
(i) Anti-linearity from T introduces only complex conjugation, which commutes with variational derivatives as shown. (ii) The assumption that is not varied (spurion posture) is essential; if one promotes to a dynamical field, additional boundary terms appear but Equation (A5) continues to hold for the scalar projector provided the same posture (A1–A2) is kept for the extended field space.
Appendix A.4. Variational Identities For -g, ϵ μνρσ , And The Hodge Star
We collect formulas used repeatedly in Sections 2–7. We write and .
Metric and vierbein.
With ,
Determinant and Levi–Civita tensor.
Hodge star.
Let be a p-form and . Then the variation of * with respect to h is
In particular, for 2-forms F (frequent in the Palatini curvature/torsion algebra),
[PT,*]=0.
Because the metric is -even and the chosen orientation is preserved (A2), the Hodge map built from commutes with :
This identity is used both in the selection rules and in the projector proofs that involve p-form duals.
Appendix A.5. Boundary/Topology Posture and Improvement Currents
Assumption A4 is realized in either of the following equivalent ways:
- (i)
- Compact, -invariant domains with vanishing boundary flux: for any improvement current arising from integration by parts, .
- (ii)
- Standard fall-offs on asymptotically flat or spatially flat FRW patches, for which reduces to a surface integral that vanishes in the limit. A sufficient set iswhich ensures so that the flux through a sphere of radius R decays as .
These conditions justify replacing improvement terms by boundary conventions and are precisely what is used in the flux-ratio diagnostics of Section 5.4.
Appendix A.6. Consequences Used in the Main Text
(C1) Palatini block-diagonalization.
Theorem A1 (A3) allows us to project then vary in the Palatini equations, so that the connection variation is algebraic and block-diagonal in the torsion irreps. Together with the selection rules (Prop. A2) this yields and the pure-trace map quoted in Section 4.
(C2) Route equivalence modulo boundary.
Self-adjointness (Prop. A1) and the boundary posture (Appendix A.5) justify the equality of the three quadratic routes up to improvements, with closed forms of the improvement currents given in Appendix C.
(C3) Equal-coefficient identity and c T =1.
The star-variation identities (A8)–(A9) are used inside the ADM expansion behind the equal-coefficient identity proven in Appendix D. The boundary posture then enforces and at quadratic order.
This completes the formal proof of A3 and the supporting calculus advertised in Section 2.
Appendix B. Irrep Projectors & No-Go for q λμν (v)
This appendix collects the group-theoretic ingredients used in Section 4: (i) the irreducible decomposition of the torsion tensor under the Lorentz group, (ii) explicit, idempotent projectors onto the trace, axial, and traceless sectors, (iii) the quadratic identity for in our conventions, and (iv) the single-vector no-go that underlies the statement quoted in the main text as “Proposition B.1” for the irrep. All statements are purely algebraic and hold before/after applying the scalar projector ; after projection all scalar contractions are real (Section 2).
Appendix B.1. Torsion as a Lorentz Representation and Its Algebra
In index language (spacetime indices), torsion is a rank-3 tensor antisymmetric in its last two indices, , with independent components in . The Lorentz-covariant irreducible content splits into
We use and the metric signature , and we adopt the standard scalar product on this space.5
Appendix B.2. Idempotent Projectors
Define three linear maps on the torsion space by
These are the unique Lorentz-covariant, algebraic (derivative-free) projectors onto the three irreps in Equation (A12). A direct computation shows:
and the images obey by construction
Orthogonality and quadratic split.
With the scalar product ,
Using (A13)–(A15) one finds the standard quadratic identity
where we have denoted for the standard normalization of the traceless piece.
Normalization used in the main text.
For later convenience—and to match the coefficient choice used in Section 4—we rescale the traceless irrep by a constant factor and define
The projector formulas (A13)–(A15) are unchanged; only the bookkeeping name “q” for the traceless image carries the fixed factor.6 After applying to either side of (A20), the scalar is manifestly real (Theorem 1).
Appendix B.3. Compatibility With The Scalar Projector
The projectors are algebraic and commute with at the scalar level: for any two torsions ,
Moreover, the mixed scalar is -odd and is annihilated by (Section 2.3). Thus the orthogonal split (A18) remains valid as an identity between projected, real scalars.
Appendix B.4. Proposition B.1: Single-Vector No-Go For The Traceless Irrep
We now formalize the statement invoked in Section 4.1.
Proposition A3
(single-vector no-go). Let be any nonzero covector. There is no nonvanishing tensor of the form , linear in , that (i) is antisymmetric in , (ii) obeys , and (iii) satisfies . Equivalently, the traceless irrep cannot be constructed from a single vector.
Proof.
The most general Lorentz-covariant tensor built linearly from a single and antisymmetric in its last two indices is a linear combination of the two rank-one seeds
with real . Compute its traces and axial contraction:
where we used and . Requiring the trace constraints forces , and the axial constraint forces . Therefore the only admissible linear combination is the trivial one, , proving the claim. □
Corollary A1.
For any single covector the projector annihilates the two rank-one seeds: .
Appendix B.5. Consequences For The C1 Ansatz
Applying Prop. A3 to the most general linear ansatz with one derivative (Section 4.1),
shows that the attempted traceless piece necessarily vanishes: it is a linear, single-vector construct and is thus killed by (Cor. A1). The ansatz collapses to
recovering Equation (4. 2) of the main text. The scalar projector removes -odd scalars built from the axial seed (Section 2.3), and the Palatini connection equation then sets while fixing under the trace lock (Section 4.2). This yields the uniqueness map quoted in Theorem 2.
Appendix B.6. Consistency Check With The Quadratic Invariant
Appendix B.7. Edge Cases and Patches
On loci where the normalized direction is defined patchwise (or by continuity); all algebraic projector statements remain valid, and the conclusions above hold on any patch with . Global/topological subtleties (multi-valued , nontrivial bundles) lie outside the posture A1–A5 (Section 2).
- Summary of Appendix B. We have given explicit, idempotent projectors onto the three torsion irreps, fixed the quadratic identity in the normalization used in the main text, and proved the single-vector no-go: from one covector no nonzero traceless torsion irrep can be built. This reduces the most general one-derivative ansatz to the span, after which the Palatini equations and the scalar projector select the pure-trace map used in the C1 uniqueness theorem.
Appendix C. Appendix C: Three–Chain Reductions & Improvement Currents (σ ϵ Scheme)
- Scope ( scheme and naming). This appendix provides the paper–checkable reductions behind Section 5 under the sign-compensated convention and the rank-one determinant route naming (formerly “DBI”-type; not Born–Infeld gravity): (i) a rank-one determinant route built out of the canonical traceless matrix , (ii) a closed–metric rank–one deformation, and (iii) the –even CS/Nieh–Yan shadow. At quadratic order, each route reduces in the bulk to the same invariant linewith improvements differing by boundary choices (A4/A5). Closed representatives for are given on FRW/weak–field backgrounds.
- Notation and key relation. We use the preamble shorthands so that and (after C1)
Appendix C.1. rank-one determinant route: Determinant Algebra with the Normalization
Consider the rank-one determinant route Lagrangian
Using and , the quadratic piece is
With and ,
so that
At the bulk-density level one may take . For unified boundary diagnostics we adopt a common canonical representative for all three routes (Appendix C.4).
Appendix C.2. Closed–Metric Route: Rank–One Deformation Equals rank-one determinant route To O(T 2 )
Take the rank–one deformation so that and define . The same algebra gives
Thus rank-one determinant route and CM have the same bulk coefficient and differ only by improvements.
Appendix C.3. Pt–Even CS/Nieh–Yan Shadow: Quadratic Reduction ( σ ϵ )
Using , applying * and the scalar projector (A2), and evaluating after C1, the –even piece reduces at quadratic order to
where the Nieh–Yan assignment (A5) reshuffles only boundary conventions inside the –even sector.
Appendix C.4. A Universal Canonical Improvement at Quadratic Order
For route–by–route flux comparisons it is convenient to select the same improvement representative for all routes:
so that we adopt the convention
Different representatives differ by and yield identical integrated fluxes under A4.
Check (FRW).
On spatially flat FRW in TT gauge,
i.e., the canonical reshuffling between TT kinetic/gradient bilinears plus a pure time boundary term that integrates to zero with A4 fall–offs.
Appendix C.5. Closed Forms for FRW and Weak Field
FRW.
For and homogeneous ,
which satisfies (A36).
Weak field (AF).
At ,
Appendix C.6. Flux–Ratio Identity & Finite–Domain Convergence
With the unified choice (A35), , hence
On finite FRW balls (or AF shells) residuals scale away with the radius R, agreeing with Section V.
Summary of Appendix C
Appendix D. Appendix D: Mixing Matrix and the Equal–Coefficient Identity
This appendix contains (i) extraction rules and tables for the mixing matrix used in Section 6, including a non-collinearity proof of its two row vectors on admissible backgrounds, and (ii) a covariant derivation of the equal–coefficient identity quoted in Section 7. We assume A1–A5, the scalar projector (Section 2), and the C1 map . Projected scalars are real by construction; the scheme only affects the bulk line through , not the kinematical identity .
Variational domain (used below).
We take variations with compact support on spatial slices or with FRW/AF fall-offs: , , with . Then and .
Appendix D.1. Adm Conventions and Extraction of Mixing Entries
With , , (), and , we project with . The quadratic Lagrangian takes the block form
where collects nonpropagating pieces. Define the dimensionless mixing entries by
For , the mixing block is linear in w and proportional to :
defining the four dimensionless coefficients .
Appendix D.2. Background Invariants And Compact Parametrization
Introduce
(prime is conformal-time derivative). Each admits a linear decomposition
with c’s real numbers fixed by the quadratic expansion rules (route Jacobians plus contorsion under C1).
Appendix D.3. Coefficient Tables (FRW and Weak Field)
Table A1.
FRW coefficients with . Entries are the dimensionless ’s of (A43), written as [Equation (A45)]. Overall factor multiplies the mixing (not shown here).
| Coefficient | |||
|---|---|---|---|
Regeneration recipe (FRW). (1) Write in terms of ; (2) expand to linear order using and C1; (3) insert into and with the scaling; (4) keep only and bilinears to read off .
Table A2.
Weak field (AF) coefficients with slowly varying . Set () and define . Overall factor multiplies the mixing (not shown here).
Table A2.
Weak field (AF) coefficients with slowly varying . Set () and define . Overall factor multiplies the mixing (not shown here).
| Coefficient | ||
|---|---|---|
Regeneration recipe (weak field). Repeat FRW steps with , replace conformal by physical time, and expand consistently in spatial gradients so that remains the projected, real scalar.
Closed-form labels (for Section VI cross-references).
For later citation we record the compact forms as Equations (D.12)–(D.15):
Appendix D.4. Non-Collinearity of the Two Locking Equations
Let the two rows be , .
Proposition A4
(Non-collinearity). Under A1–A5, C1, and the one-derivative-per-building-block posture, on any admissible background with at least one of and . Equivalently,
- Proof (sketch). Using (A45), proportionality would require to be route–independent and constant under independent shifts of and . But and cannot both vanish for unless (static trivial branch , ). Hence generically. □
Small-k structure (symbolic).
On weak-field patches one finds
so rank loss occurs only on the measure-zero set or special foliations.
Appendix D.5. Equal–Coefficient Identity: Covariant Derivation And Gauge Shift
Define the quadratic current (indices contracted with the background spatial metric)
with and . Using TT conditions, the rank–one traceless normalization, and the bulk equality of the routes (Section V),
Under , , the representative shifts as , hence the integrated identity is gauge independent.
FRW and weak-field representatives.
On spatially flat FRW (, homogeneous ),
so is a total divergence. In weak field (AF, ),
Boundary consequence and luminality.
With the variational domain above (A4), . At the locked weights (Section VI; no TT–nonTT mixing), at quadratic order, slicing–independently.
Appendix D.6. Locked Weights and Summary Box
Non-collinearity with the two mixing equations yields a unique ratio (up to the GR normalization). At these weights, implies exact luminality.
Appendix D (at a glance).
- Mixing matrix. Four dimensionless coefficients (; ) control the TT–constraint mixing with an overall factor.
- Non-collinearity. The two locking rows are not proportional on evolving admissible backgrounds; the determinant is generically nonzero ().
- Equal–coefficient identity. ; under A4 this yields and at the locked weights .
Reproducibility Note
Table A1–Table A2 come from a single symbolic pipeline that: (i) expands and to linear order in ADM variables with the normalization, (ii) forms the rank-one determinant route/CM quadratic densities, (iii) projects onto the bilinears of Equations (A41)–(A42). Scripts and hashes that also produced Figures c3_cT_heatmap and c3_dispersion are cataloged in Supp. R.
Appendix E. Dirac Coupling, Field Redefinition, and the Nieh–Yan Scope
This appendix supplies the details promised in Section 8: (i) the torsion–fermion couplings in our conventions, (ii) the precise field redefinition that removes the trace channel once the pure-trace map (C1) is imposed, (iii) the role of the Nieh–Yan density as a boundary convention (A5), and (iv) the scope limitations on nontrivial topology (A4).
Throughout we work under the global posture A1–A5 of Section 2, use metric signature , and adopt the gamma-matrix conventions
so that and .
Appendix E.1. Minimal Dirac Coupling In Riemann–Cartan Space
The minimally coupled Dirac Lagrangian is
Splitting the spin connection into Levi–Civita plus contorsion, the torsion-dependent piece of (A51) is
where tangent indices are moved with , and .
It is convenient to decompose contorsion into the standard torsion irreps (vector trace , axial , and traceless ):
with and . Using the gamma identities listed below Equation (A50) and the antisymmetry of in , Equation (A52) reduces to
where and . In our normalization (A50) the numerical coefficients are
while the q-channel is proportional to the totally antisymmetric part of q, which vanishes by definition; equivalently, the q-coupling can be re-expressed in terms of and drops out when . Therefore the torsion-induced Dirac channels in our conventions are precisely
up to -even improvement terms annihilated by A1/A4 in the bulk.
Cross-check.
Equation (A56) reproduces the two-channel bookkeeping used in Section 8 with and . Any alternative gamma/Hodge convention simply rescales (A55) by an overall sign; our later conclusions (vanishing axial channel by C1 and removability of the trace channel) are insensitive to such simultaneous flips.
Appendix E.2. C1 Implies no Axial Channel; The Trace Channel is Removable
By the uniqueness theorem (C1), Equation (13), the axial and traceless torsion irreps vanish, and the trace aligns with the spurion gradient, Equation (A56) therefore reduces to the single trace channel
Proposition A5
(Vector rephasing removes the trace channel). Consider the local vector phase redefinition with a constant α. Then
so choosing cancels (A57) pointwise. Under A4 the improvement integrates to the boundary and has no bulk Euler–Lagrange effect; A5 permits absorbing any parity-odd reshuffling in the Nieh–Yan counterterm.
Sketch
Insert into the kinetic term and use the Leibniz rule. The derivative acting on generates the shift in (A58); the mass and spin-connection pieces are invariant under a vector (not axial) phase. The remainder is a covariant total divergence fixed by the integration-by-parts convention (A4/A5). □
Combining (A57) with Prop. A5 and the coefficient assignment (A55) yields precisely the two-line summary in Section 8: no axial channel and a removable trace channel.
Path-integral measure (anomaly) check.
The field redefinition in Prop. A5 is a vector rotation, hence the fermionic measure is invariant (Jacobian equal to one). An axial rotation would generate the usual ABJ contribution; in a Riemann–Cartan background it is accompanied by a Nieh–Yan density. We do not perform an axial rotation anywhere in this work.
Appendix E.3. Nieh–Yan as a Boundary Convention (A5)
The Nieh–Yan 4-form is an exact form. In our posture (A5), any explicit use of enters only as a boundary convention after applying the scalar projector : it does not modify Euler–Lagrange equations in the bulk and is indistinguishable from a choice of improvement current. This applies equally to (i) the three-chain equivalence (where the -even CS/Nieh–Yan shadow differs from the DBI/CM routes by an improvement current) and (ii) the Dirac sector (where vector rephasing reshuffles boundary terms that can be absorbed into the chosen Nieh–Yan convention). No physical statement in Sections 5–8 depends on a specific Nieh–Yan choice.
Appendix E.4. Scope and Caveats: Topology and Boundary Flux
Our conclusions rely on the posture A4: either compact -invariant domains with vanishing boundary flux or standard asymptotic fall-offs (FRW/flat) so that improvement currents integrate to zero. They also assume a single-valued spurion phase so that the rephasing in Prop. A5 is a globally well-defined map .
- Nontrivial topology (not covered). If is multi-valued or admits nontrivial holonomy (e.g., on manifolds with nontrivial or ), the map may fail to be single-valued. In such cases the local cancellation in (A58) can leave a global remnant proportional to the winding; our bulk equivalences and removability statements are not asserted in that setting.
- Nonvanishing boundary flux (not covered). On domains where the -invariant boundary flux of the relevant improvement currents does not vanish, boundary terms may carry physical information (e.g., in explicitly finite boxes with prescribed inflow). Our null tests and cancellations are presented only under A4 fall-offs.
Appendix E.5. Bookkeeping Table And Quick References
For convenience we summarize the conventions and coefficients used in the Dirac sector:
| Object / Convention | Value / Definition |
| Gamma matrices | , |
| Hodge / Levi-Civita | , (A2) |
| Contorsion split | |
| Dirac currents | , |
| Torsion→Dirac | |
| C1 (pure trace) | , , |
| Vector rephasing | with |
| Outcome | Trace channel removed up to a total derivative (A4/A5) |
| Nieh–Yan | Boundary convention only (A5); no bulk Euler–Lagrange effect |
Appendix E.6. Corollary: No LO Four-Fermion Contact from Torsion
At the order analyzed in this paper (quadratic in fields; at most one derivative per building block), torsion is algebraic and fixed by (C1), and the only linear Dirac–torsion channel that survives projection is removed by the vector redefinition above. Consequently no tree-level, local four-fermion contact term is induced at leading order within our posture (A1–A5). Any such effect would require (i) an axial channel (), (ii) higher-derivative completions beyond our closure basis, or (iii) loop corrections outside the present scope.
- Summary of Appendix E. In our conventions the minimally coupled Dirac field interacts with torsion through . Under the pure-trace map (C1) the axial channel vanishes and the remaining trace channel is removed by a local vector rephasing , up to a total derivative consistent with A4/A5. Nieh–Yan acts only as a boundary convention, and nontrivial topology or nonvanishing boundary flux lie outside our stated scope.
Appendix F. Operational Diagnostics (Extended)
This appendix collects a practitioner-oriented checklist and an expanded comparison table. Unless stated otherwise, all entries are framed for admissible patches with the boundary/topology posture A4, and for the quadratic order analyzed in the main text.
Appendix F.1. Full Decision Tree (D1–D8)
- (D1) Parity channels. Any detection of helicity-dependent phase or amplitude birefringence in GWs points to parity-odd operators. Our scalar- posture forbids such effects at LO (Theorem 1; Section 2.2).7
- (D4) Boundary equivalence. Boundary flux ratios converge to 1 on growing domains (A4) (Section 5.4; Figure 4). Persistent deviations falsify C2.
- (D5) Exact luminality by identity. After eliminating TT–nonTT mixing with the full-rank system (Section 6.3), the equal-coefficient identity enforces without tuning (Section 7; Figure 7).
- (D6) DoF count. The quadratic kernel exhibits exactly two propagating tensor modes; no extra scalar/vector propagation survives the degeneracy test (Section 7.3; Figure 8). Any additional mode falsifies our posture at this order.
- (D7) NLO slope. At next order, the leading -even dispersion predicts (Equation (54)): a log–log slope in clean frequency windows is characteristic (Figure 9; Section 9.1).8
- (D8) Fermion channel null. No axial contact and a removable trace contact in the Dirac sector at LO (Section 8). Any robust axial spin–torsion signal would contradict C1 (Appendix E contains coefficients and boundary conventions).
Appendix F.2. Expanded Disambiguation Table
Entries are generic at LO on admissible backgrounds with A4 fall-offs; tuned subclasses and specific parameter choices may alter individual cells. See the notes in Appendix F.3 for caveats and representative citations.
Appendix F.3. Notes, Caveats, And Representative Anchors
Parity-odd lines.
Horndeski/DHOST.
Teleparallel/f(T).
Many models yield at LO; torsion irreps and matter couplings are model-dependent, and our route-equality/flux-ratio diagnostics (C2) do not directly apply. We therefore treat teleparallel cases as outside the present “three-route” posture.
EC/ECSK-like.
NLO dispersion.
Boundary posture.
All boundary-sensitive statements assume A4 (PT-invariant compact boundaries or standard AF/FRW fall-offs) and A5 (Nieh–Yan as boundary counterterm). Departures from these postures may alter flux diagnostics and improvement accounting. Operational anchors: covariant phase space and surface charges [20,21,22], and the Holst/Nieh–Yan parity bookkeeping [9,10,11,12].
Representative anchors (one-line map).
References
- Palatini, A. Deduzione invariantiva delle equazioni gravitazionali dal principio di Hamilton. Rend. Circ. Mat. Palermo 1919, 43, 203–212. [Google Scholar] [CrossRef]
- Kibble, T.W.B. Lorentz invariance and the gravitational field. J. Math. Phys. 1961, 2, 212–221. [Google Scholar] [CrossRef]
- Sciama, D.W. On the analogy between charge and spin in general relativity. in Recent Developments in General Relativity (Pergamon, 1962), pp. 415–439.
- Hehl, F.W.; von de r Heyde, P.; Kerlick, G.D.; Nester, J.M. General Relativity with Spin and Torsion: Foundations and Prospects. Rev. Mod. Phys. 1976, 48, 393–416. [Google Scholar] [CrossRef]
- Hehl, F.W.; Datta, B.K. Nonlinear spinor equation and asymmetric connection in general relativity. J. Math. Phys. 1971, 12, 1334–1339. [Google Scholar] [CrossRef]
- Hehl, F.W.; McCrea, J.D.; Mielke, E.W.; Ne’eman, Y. Metric-affine gauge theory of gravity: Field equations, Noether identities, world spinors, and breaking of dilaton invariance. Phys. Rept. 1995, 258, 1–171. [Google Scholar] [CrossRef]
- Hammond, R.T. Torsion gravity. Rep. Prog. Phys. 2002, 65, 599–649. [Google Scholar] [CrossRef]
- Shapiro, I.L. Physical aspects of the space–time torsion. Phys. Rept. 2002, 357, 113–213. [Google Scholar] [CrossRef]
- Nieh, H.T.; Yan, M.L. An identity in Riemann–Cartan geometry. J. Math. Phys. 1982, 23, 373–374. [Google Scholar] [CrossRef]
- Chandia, O.; Zanelli, J. Topological invariants, instantons and the chiral anomaly on spaces with torsion. Phys. Rev. D 1997, 55, 7580–7585. [Google Scholar] [CrossRef]
- Holst, S. Barbero’s Hamiltonian derived from a generalized Hilbert–Palatini action. Phys. Rev. D 1996, 53, 5966–5969. [Google Scholar] [CrossRef]
- Mercuri, S. , Fermions in the Ashtekar–Barbero connection formalism: The Nieh–Yan invariant as a source of the Immirzi parameter. Phys. Rev. D 2006, 73, 084016. [Google Scholar] [CrossRef]
- Sotiriou, T.P.; Faraoni, V. “f(R) theories of gravity,” Rev. Mod. Phys. 2010, 82, 451–497. [Google Scholar] [CrossRef]
- Jackiw, R.; Pi, S.-Y. Chern–Simons modification of general relativity. Phys. Rev. D 2003, 68, 104012. [Google Scholar] [CrossRef]
- Alexander, S.; Yunes, N. Chern–Simons Modified Gravity. Phys. Rept. 2009, 480, 1–55. [Google Scholar] [CrossRef]
- Bekenstein, J.D. The Relation between physical and gravitational geometry. Phys. Rev. D 1993, 48, 3641–3647. [Google Scholar] [CrossRef] [PubMed]
- Deser, S.; Gibbons, G.W. Born–Infeld–Einstein actions? Class. Quantum Grav. 1998, 15, L35–L39. [Google Scholar] [CrossRef]
- Ba nados, M.; Ferreira, P.G. Eddington’s theory of gravity and its progeny. Phys. Rev. Lett. 2010, 105, 011101. [Google Scholar] [CrossRef]
- Arnowitt, R.; Deser, S.; Misner, C.W. The Dynamics of General Relativity. in Gravitation: An Introduction to Current Research, ed. L. Witten (Wiley, 1962), pp. 227–265; reprinted in Gen. Rel. Grav. 2008, 40, 1997–2027. [Google Scholar] [CrossRef]
- Wald, R.M. General Relativity (University of Chicago Press, 1984).
- Iyer, V.; Wald, R.M. Some properties of Noether charge and a proposal for dynamical black hole entropy. Phys. Rev. D 1994, 50, 846–864. [Google Scholar] [CrossRef]
- Regge, T.; Teitelboim, C. Role of surface integrals in the Hamiltonian formulation of general relativity. Annals Phys. 1974, 88, 286–318. [Google Scholar] [CrossRef]
- B. P. Abbott et al. (LIGO Scientific Collaboration and Virgo Collaboration), GW170817: Observation of Gravitational Waves from a Binary Neutron Star Inspiral. Phys. Rev. Lett. 2017, 119, 161101. [CrossRef]
- Abbott, B.P.; et al. (LIGO Scientific Collaboration and Virgo Collaboration), Multi-messenger Observations of a Binary Neutron Star Merger. Astrophys. J. Lett. 2017, 848, L12. [Google Scholar] [CrossRef]
- Goldstein, A.; et al. , An Ordinary Short Gamma-Ray Burst with Extraordinary Implications: Fermi-GBM Detection of GRB 170817A. Astrophys. J. Lett. 2017, 848, L14. [Google Scholar] [CrossRef]
- Savchenko, V.; et al. INTEGRAL Detection of the First Prompt Gamma-Ray Signal Coincident with the Gravitational-wave Event GW170817. Astrophys. J. Lett. 2017, 848, L15. [Google Scholar] [CrossRef]
- Creminelli, P.; Vernizzi, F. Dark Energy after GW170817 and GRB170817A. Phys. Rev. Lett. 2017, 119, 251302. [Google Scholar] [CrossRef]
- Baker, T.; Bellini, E.; Ferreira, P.G.; Lagos, M.; Noller, J.; Sawicki, I. Strong constraints on cosmological gravity from GW170817 and GRB170817A. Phys. Rev. Lett. 2017, 119, 251301. [Google Scholar] [CrossRef]
- Ezquiaga, J.M.; Zumalacárregui, M. Dark Energy After GW170817: Dead Ends and the Road Ahead. Phys. Rev. Lett. 2017, 119, 251304. [Google Scholar] [CrossRef]
- Sakstein, J.; Jain, B. Implications of the Neutron Star Merger GW170817 for Cosmological Scalar–Tensor Theories. Phys. Rev. Lett. 2017, 119, 251303. [Google Scholar] [CrossRef]
- Agazie, N.V.; et al. (NANOGrav Collaboration), The NANOGrav 15-year Data Set: Evidence for a Gravitational-Wave Background. Astrophys. J. Lett. 2023, 951, L8. [Google Scholar] [CrossRef]
- Antoniadis, J.; et al. (EPTA Collaboration and InPTA Collaboration). The second data release from the European Pulsar Timing Array: Search for signals from new physics. Astron. Astrophys. 2023, 678, A50. [Google Scholar]
- Reardon, D.J.; et al. (PPTA Collaboration), Search for an Isotropic Gravitational-Wave Background with the Parkes Pulsar Timing Array. Astrophys. J. Lett. 2023, 951, L7. [Google Scholar] [CrossRef]
- Liu, F.A.A.; et al. (CPTA Collaboration), Searching for the nano-Hertz stochastic gravitational-wave background with the Chinese Pulsar Timing Array Data Release I. Res. Astron. Astrophys. 2023, 23, 075024. [Google Scholar]
- Kase, R.; Tsujikawa, S. Dark energy in Horndeski theories after GW170817: A review. Int. J. Mod. Phys. D 2019, 28, 1942005. [Google Scholar] [CrossRef]
- Langlois, D. Dark Energy and Modified Gravity in Degenerate Higher-Order Scalar–Tensor (DHOST) theories. Int. J. Mod. Phys. D 2019, 28, 1942006. [Google Scholar] [CrossRef]
- Obukhov, Y.N. Poincaré gauge gravity: Selected topics. Int. J. Geom. Methods Mod. Phys. 2006, 3, 95–138. [Google Scholar] [CrossRef]
- Obukhov, Y.N.; Hehl, F.W. Rotation, acceleration, and gravity in the framework of classical electrodynamics. Phys. Lett. A 2008, 372, 3946–3952. [Google Scholar] [CrossRef]
| 1 | When the constructions are understood on patches with and extended by continuity. The overall sign bookkeeping is carried by , so orientation flips are harmless. |
| 2 | Independence follows because, before imposing any relation between and , no integration-by-parts identity reduces the linear bilinear to a combination of and up to improvements. |
| 3 | We use “rank-one determinant route’’ (formerly “DBI’’-type) to denote the volume deformation in our posture; this is not Born–Infeld gravity. |
| 4 | Other NLO scalars either renormalize K and G equally (leaving unchanged at this order) or reduce to improvements under A4/A5. |
| 5 | Frame and spacetime contractions are equivalent once is inserted; all formulas below hold with either or , and we freely move between the two notations. |
| 6 | This harmless convention matches Equation (4. 13) of the main text (positivity split) and simplifies a few numerical diagnostics; no physics depends on it. |
| 7 | Chern–Simons modified gravity is the canonical benchmark for helicity-split propagation; see e.g., Jackiw–Pi; Alexander–Yunes. |
| 8 | Caveat: finite-window fits may be biased by instrumental systematics or astrophysical priors; interpret bounds conservatively. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 1996 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



