1. Introduction
Across domains of human behaviour, including education, work, health, and self-regulation, individuals frequently fail to initiate effortful tasks despite possessing adequate knowledge, incentives, and explicit intentions. This recurrent pattern presents a persistent empirical paradox: actions that are valued, planned, and understood often fail to begin. Although effortful persistence has been extensively examined, breakdowns at the point of initiation remain comparatively under-theorised, even though such failures account for a substantial proportion of real-world performance deficits (Ferrari, 2001; Solomon & Rothblum, 1984; Steel, 2007).
Established motivational frameworks provide robust accounts of how individuals form intentions and value outcomes. Expectancy–value models, self-efficacy theory, self-determination theory, and the theory of planned behaviour all specify how beliefs, incentives, and goals shape commitment (Ajzen, 1991; Atkinson, 1957; Bandura, 1977; Deci & Ryan, 1985, 2000; Eccles & Wigfield, 2002; Vroom, 1964). However, these approaches typically assume that once sufficient motivation or intention is present, action initiation follows. Empirically, this assumption is frequently violated.
Related literature on self-control, self-regulation, and cognitive control documents effort breakdowns in terms of depleted resources, opportunity costs, or goal conflict (Baumeister & Heatherton, 1996; Inzlicht et al., 2014; Kurzban et al., 2013). Attention and control research has clarified how cognitive resources are allocated and maintained after engagement begins (Botvinick, 2007; Pessoa, 2009; Shenhav et al., 2013), while stress and burnout research emphasises cumulative exhaustion and disengagement. Across these traditions, however, initiation itself is commonly treated as a trivial or implicit transition rather than as a structurally constrained cognitive event.
As a result, a central explanatory question remains unresolved: why does effort sometimes fail to begin at all, even when motivational, cognitive, and contextual preconditions appear satisfied? Addressing this question requires shifting analytic focus away from persistence and allocation toward the structural conditions that make effort initiation mechanically possible in the first place.
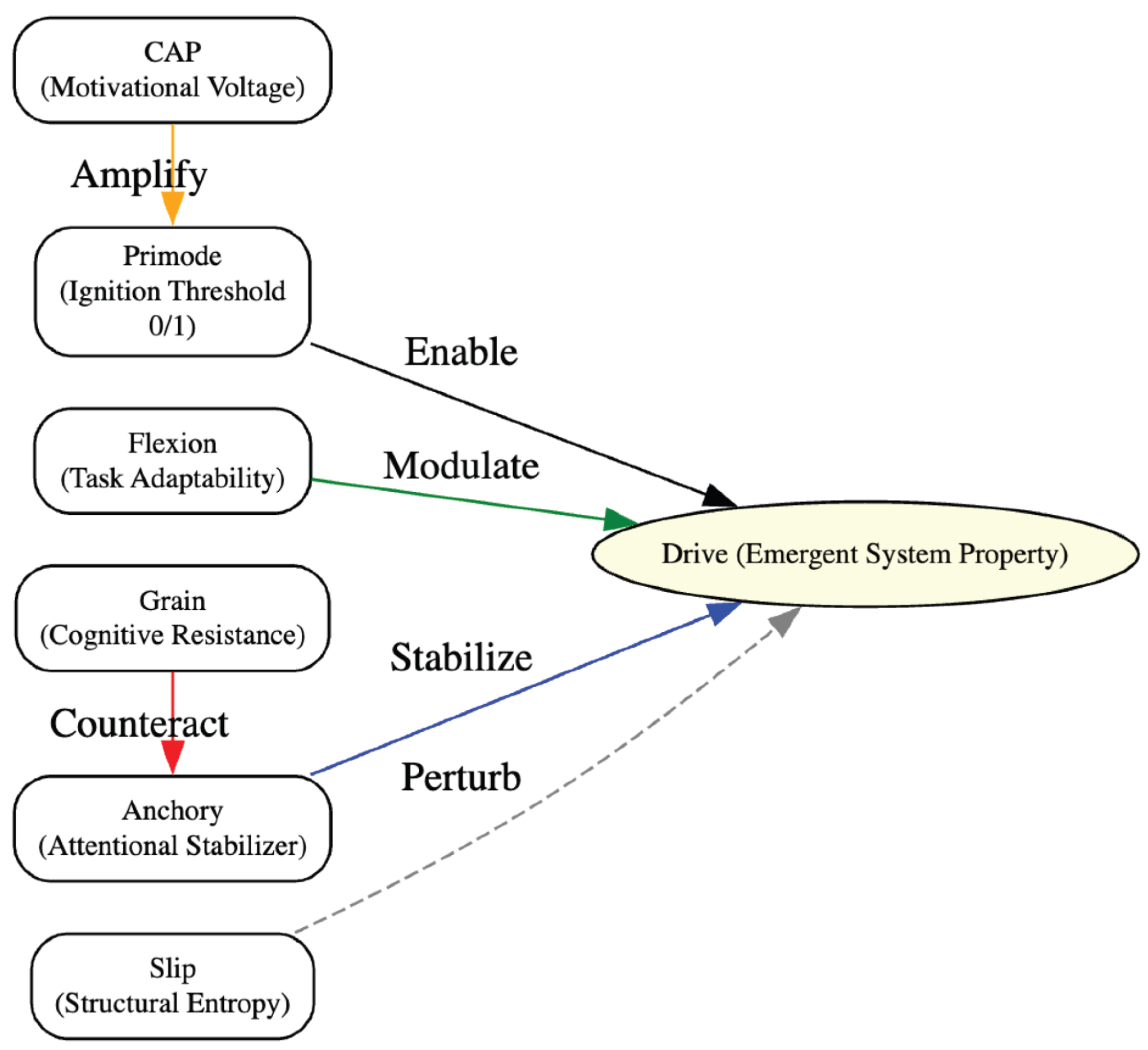
Cognitive Drive Architecture (CDA), previously proposed as a field within cognitive psychology, addresses this gap by modelling volitional effort as a system-level structural property rather than as a dispositional or motivational state (Lagun, 2025). Within CDA, Drive is defined by the configuration of internal structural variables governing ignition readiness (Primode), motivational amplification (CAP), adaptability (Flexion), stabilisation (Anchory), resistance (Grain), and intrinsic variability (Slip). CDA does not compete with motivational or cognitive control theories, nor does it extend classical cognitive architectures concerned with information processing after engagement has begun. Instead, it occupies a distinct explanatory domain: the structural preconditions under which effort can emerge, stabilise, or collapse prior to task execution.
The present study does not introduce or establish CDA as a field. That proposal has been articulated elsewhere (Lagun, 2025). Rather, this paper addresses a narrower and more conservative objective. First, it derives Lagun’s Law, the canonical equation within CDA, from explicit first principles, translating qualitative claims about effort into a dimensionally coherent and formally constrained model. Second, it evaluates the empirical tractability of this law using a secondary educational dataset by mapping theoretically defined structural variables onto behavioural proxies under naturalistic conditions. This analysis is intended as a feasibility calibration rather than causal validation. Finally, the paper delineates the limits of its claims, emphasising testability and falsifiability over theoretical closure, and motivating future controlled experiments designed to directly manipulate key structural variables.
2. Cognitive Drive Architecture: Conceptual Overview
2.1. Domain and Scope of Cognitive Drive Architecture
Cognitive Drive Architecture (CDA) concerns the structural preconditions under which volitional effort becomes possible within a cognitive system. Its domain is not motivational strength, goal content, or stable personality traits. Instead, CDA examines the system-level configuration that determines whether effort can ignite, stabilise, or collapse prior to task execution.
Existing motivational theories primarily address why agents value outcomes or form intentions (Ajzen, 1991; Deci & Ryan, 2000; Vroom, 1964), whereas self-regulation and cognitive control models focus on how behaviour is regulated once engagement has begun (Baumeister & Heatherton, 1996; Botvinick, 2008; Shenhav et al., 2017). CDA precedes both classes of explanation. It is explicitly concerned with the interval before sustained processing, rule execution, or control allocation occurs, during which effort either becomes mechanically viable or fails to materialise.
Accordingly, CDA does not attempt to explain motivational preferences, affective valuation, or dispositional traits such as grit or conscientiousness (Duckworth et al., 2007). Nor does it model procedural cognition, memory retrieval, or decision-making processes once action is underway. Its scope is intentionally narrower and more foundational: CDA formalises the structural readiness state that determines whether a cognitive system can enter an effortful regime at all.
By isolating Drive as a structural system property rather than a dispositional or motivational attribute, CDA aims to provide explanatory clarity for initiation failures, rapid effort collapse, and unstable engagement patterns that are insufficiently explained by motivational intensity alone (Kurzban et al., 2013; Steel, 2007).
2.2. Core Structural Variables of Cognitive Drive Architecture
Within CDA, Drive is treated as an emergent system property arising from the interaction of six structurally distinct variables. At this stage, these variables are defined conceptually rather than operationally; they are introduced as formal components of the architecture rather than as measurement constructs or behavioural proxies.
1. Primode (Ignition Threshold).
Primode represents the readiness state of the cognitive system with respect to effort initiation. It specifies whether the system has crossed the threshold required for volitional engagement to become possible. When Primode is inactive, effort cannot emerge regardless of motivational or contextual factors.
2. Cognitive Activation Potential (CAP).
CAP denotes the magnitude of motivational voltage available to amplify effort once ignition has occurred. It reflects the intensity of energising forces capable of scaling effort following readiness, without itself guaranteeing initiation.
3. Flexion (Task Adaptability).
Flexion captures the degree of structural compatibility between the current cognitive configuration and task demands. It specifies how effectively an available drive can be translated into sustained engagement, given task–system alignment.
4. Anchory (Attentional Stabilisation).
Anchory represents stabilising forces that maintain engagement once effort has begun. It counteracts destabilisation and supports continuity of focus, protecting drive from premature collapse.
5. Grain (Cognitive Resistance).
Grain denotes resistive forces within the system that oppose sustained effort. These include frictional constraints such as fatigue, interference, or internal conflict that degrade drive over time.
6. Slip (Structural Entropy).
Slip represents irreducible stochastic variability within the cognitive system. It captures random perturbations and fluctuations that affect effort independently of deterministic structural variables.
Together, these variables define the minimal structural vocabulary of CDA. Drive is not identified with any single component; rather, it arises from their joint configuration.
2.3. Why a Formal Law Is Required
Although qualitative accounts can describe factors associated with effort, they are insufficient for explaining non-initiation, abrupt collapse, or instability of engagement. Without a formal specification of how structural variables interact, it is not possible to determine which configurations permit effort, which suppress it, or why similar motivational states yield divergent behavioural outcomes.
Empirical evidence consistently shows that high motivation does not reliably predict task initiation (Ferrari, 2001; Steel, 2007) and that effort can collapse without changes in goals or incentives (Baumeister & Heatherton, 1996; Inzlicht et al., 2014). Qualitative explanations can catalogue such failures but cannot specify their boundary conditions or generate falsifiable predictions.
A formal law is therefore required to constrain admissible interactions among structural variables, enforce necessary conditions for effort ignition, specify the balance between stabilisation and resistance, and allow testable predictions regarding collapse and variability.
Within CDA, this role is served by Lagun’s Law, a constraint-based formulation that defines Drive as a lawful outcome of interacting structural variables rather than as a descriptive label. Lagun’s Law does not replace motivational or control theories; instead, it specifies the structural substrate upon which those processes can operate once effort becomes mechanically possible.
Figure 1 illustrates the conceptual architecture of CDA, depicting how ignition, amplification, modulation, stabilisation, resistance, and structural entropy jointly contribute to Drive as an emergent system property.
3. Derivation of Lagun’s Law
This section derives a canonical equation for Drive under Lagunian Dynamics by enforcing a set of structural postulates and functional constraints. The objective is not to fit an arbitrary functional form but to specify a minimal law that is (a) structurally interpretable, such that each term corresponds to a mechanistic requirement; (b) dimensionally coherent, allowing lawful combination of terms; and (c) empirically tractable, such that variables can be operationalised and falsified in principle. The derivation is motivated by converging evidence that intentions and incentives frequently fail at the initiation boundary (Ajzen, 1991; Ferrari, 2001; Steel, 2007), that subjective effort reflects nonlinear benefit–cost computation rather than linear scaling (Kurzban et al., 2013; Shenhav et al., 2017; Westbrook et al., 2021), and that cognitive performance exhibits irreducible within-person variability consistent with bounded-resource and resource-rational perspectives (Lieder & Griffiths, 2019).
Two principles guide the construction throughout. First, constraint satisfaction: each postulate imposes a mathematical condition that must hold across all admissible states. Second, minimality: among functions satisfying these constraints, the simplest form is adopted that preserves monotonicity, non-negativity, and interpretability, consistent with mechanistic modelling norms in cognitive science (Lieder & Griffiths, 2019; Shenhav et al., 2017).
3.1. Structural Postulates Governing Cognitive Drive
Postulate 1: Structural ignition (thresholded readiness).
Drive is not continuously available. Task engagement requires a readiness transition, an ignition condition, without which effort cannot be mechanically expressed. This postulate reflects the empirical intention–action gap, wherein individuals endorse goals and incentives yet fail to initiate action (Ajzen, 1991; Ferrari, 2001; Steel, 2007). The initiation boundary is therefore treated as a structural constraint rather than a motivational deficit.
Functional constraint (annihilation): If ignition readiness is absent, Drive must be zero.
Postulate 2: Motivational amplification (nonlinear mobilisation).
Once ignition is possible, motivational value does not modulate effort through simple linear gain. Instead, effort allocation reflects nonlinear mobilisation, consistent with motivational intensity models (Atkinson, 1957), opportunity-cost frameworks (Kurzban et al., 2013), rational-mechanistic accounts of effort (Shenhav et al., 2017), and dopaminergic evidence for steep benefit–cost weighting (Westbrook et al., 2021). Structurally, CAP functions as a voltage-like parameter that sharpens or relaxes the readiness-to-action mapping.
Functional constraint (nonlinear scaling): Motivational voltage must amplify Drive nonlinearly, conditional on ignition readiness.
Postulate 3: Adaptability modulation (task–system compatibility).
Ignition and motivation are insufficient if the mobilised potential cannot be converted into executable engagement. Sustained effort depends on compatibility between task demands and current cognitive configuration, consistent with control allocation models and resource-rational perspectives (Lieder & Griffiths, 2019; Shenhav et al., 2017).
Functional constraint (convertibility): If adaptability is zero, Drive must collapse even when readiness and CAP are high.
Postulate 4: Stabilisation–resistance balance (sustained engagement as tension).
Drive stability reflects tension between stabilising processes that maintain engagement and resistive processes that impose friction, conflict, and effort costs. This is consistent with hierarchical control models, intrinsic cost accounts of control, and effort-allocation frameworks (Botvinick, 2007; Kool & Botvinick, 2013; Kurzban et al., 2013; Shenhav et al., 2017).
Functional constraint (opposing constraints): Resistance must suppress Drive, stabilisation must buffer it, and the law must encode their coupling rather than treating them as independent additive predictors.
Postulate 5: Structural entropy (irreducible variability).
Observed effort and performance vary within individuals even under identical incentives and task conditions. A structural law must therefore include an explicit variability term rather than relegating deviations to unexplained residual error. This aligns with bounded-computation and resource-rational frameworks (Lieder & Griffiths, 2019).
Functional constraint (explicit noise): The law must include a stochastic component that preserves unbiased expectation and does not destabilise the deterministic structure.
3.2. Mathematical Formulation
3.2.1. Notation, Domains, and Dimensional Assumptions
Drive is defined as a scalar system property reflecting the instantaneous capacity of a cognitive system to express volitional effort given a structural configuration. At the level of the canonical law, all variables are treated as dimensionless structural quantities. This is deliberate: the aim is to specify a lawful interaction structure, with measurement units and empirical proxies introduced subsequently (Lieder & Griffiths, 2019; Shenhav et al., 2017).
1. Primode (readiness/ignition potential):
A continuous readiness potential, reflecting graded proximity to initiation, even when observed behavior appears binary.
2. CAP (Cognitive Activation Potential):
Motivational voltage or benefit signal strength, consistent with motivational intensity and cost–benefit mobilization (Atkinson, 1957; Kurzban et al., 2013; Westbrook et al., 2019).
3. Flexion (adaptability):
Task–system compatibility gain.
4. Anchory (stabilization):
Structural capacity to stabilise engagement once active.
Frictional or resistive load opposing engagement (Kool & Botvinick, 2013; Kurzban et al., 2013).
6. Slip (structural entropy):
Mean-zero perturbation capturing irreducible variability (Lieder & Griffiths, 2019).
Step 1: Ignition dependence requires annihilation when readiness is absent
Postulate 1 imposes the boundary condition:
The most direct enforcement is to require Drive to be proportional to a function that vanishes when readiness is absent:
with
The minimal monotonic choice is . However, readiness in Lagunian Dynamics functions as a gating substrate later shaped by motivational voltage. Accordingly, the dependence is kept open, with Primode retained explicitly in the expression.
Interpretive note: This formalises initiation failure as a structural impossibility under non-ignited states (Ajzen, 1991; Steel, 2007).
Step 2: CAP must amplify readiness nonlinearly after ignition
A linear mobilization form,
treats CAP as a proportional gain and cannot capture steep mobilisation transitions observed in effort allocation (Atkinson, 1957; Kurzban et al., 2013; Shenhav et al., 2017; Westbrook et al., 2020). A nonlinear dependence is therefore required.
The minimal monotonic nonlinearity preserving interpretability and dimensional coherence is exponentiation:
This form preserves ignition annihilation, sharpens readiness sensitivity as increases, and introduces no additional free parameters.
Interpretive note: This formulation requires Primode to be continuous. Binary discretization is an empirical approximation rather than a theoretical commitment.
Step 3: Flexion must modulate the conversion of mobilization into effective Drive
Flexion operates as a conversion gain, scaling how efficiently mobilized readiness is translated into executable engagement. The minimal implementation is multiplicative:
This satisfies the boundary condition and captures the empirical regularity that high motivation does not guarantee engagement under task–system mismatch (Lieder & Griffiths, 2019; Shenhav et al., 2017). Additive forms would violate Flexion’s intended role as modulation rather than generation.
Step 4: Stabilization and resistance must enter as opposing coupled constraints
Subtracting resistance linearly risks negative Drive values and unstable dynamics. A minimal, well-behaved solution is divisive normalisation by a coupled constraint term:
This formulation ensures monotonic resistance suppression, stabilization buffering, non-negativity, and interpretability of as a unified constraint load.
Interpretive note: Anchory is not a linear additive benefit but a structural component of the constraint regime.
Step 5: Slip must be explicit and additive
Postulate 5 requires an explicit variability term. The simplest implementation is additive mean-zero noise:
,
This preserves the deterministic structure as , yields an estimable variance parameter, and avoids multiplicative instability (Lieder & Griffiths, 2019; Shenhav et al., 2017).
3.3. Canonical Form of Lagun’s Law
3.3.1. Canonical Equation
Collecting the constraint-satisfying components yields the canonical law:
where
,
,
,
,
, and
.
Written in CDA terminology:
3.3.2. Interpretation of Each Term
encodes ignition gating and motivational sharpening; Flexion scales mobilized potential by task feasibility; Anchory and Grain jointly define the stabilizer–resistance constraint regime; Slip captures irreducible variability intrinsic to bounded cognitive systems.
3.3.3. Scope and Qualified Uniqueness
The equation is canonical in a qualified sense: it is the minimal closed-form expression satisfying ignition annihilation, nonlinear amplification, adaptability conversion, coupled stabilisation–resistance constraints, and explicit entropy, while preserving monotonicity and non-negativity. Any admissible alternative must preserve these invariances and is therefore equivalent up to monotone reparameterisation (Kool & Botvinick, 2013; Kurzban et al., 2013; Shenhav et al., 2017; Lieder & Griffiths, 2019).
4. Methodology
4.1. Dataset and Study Design
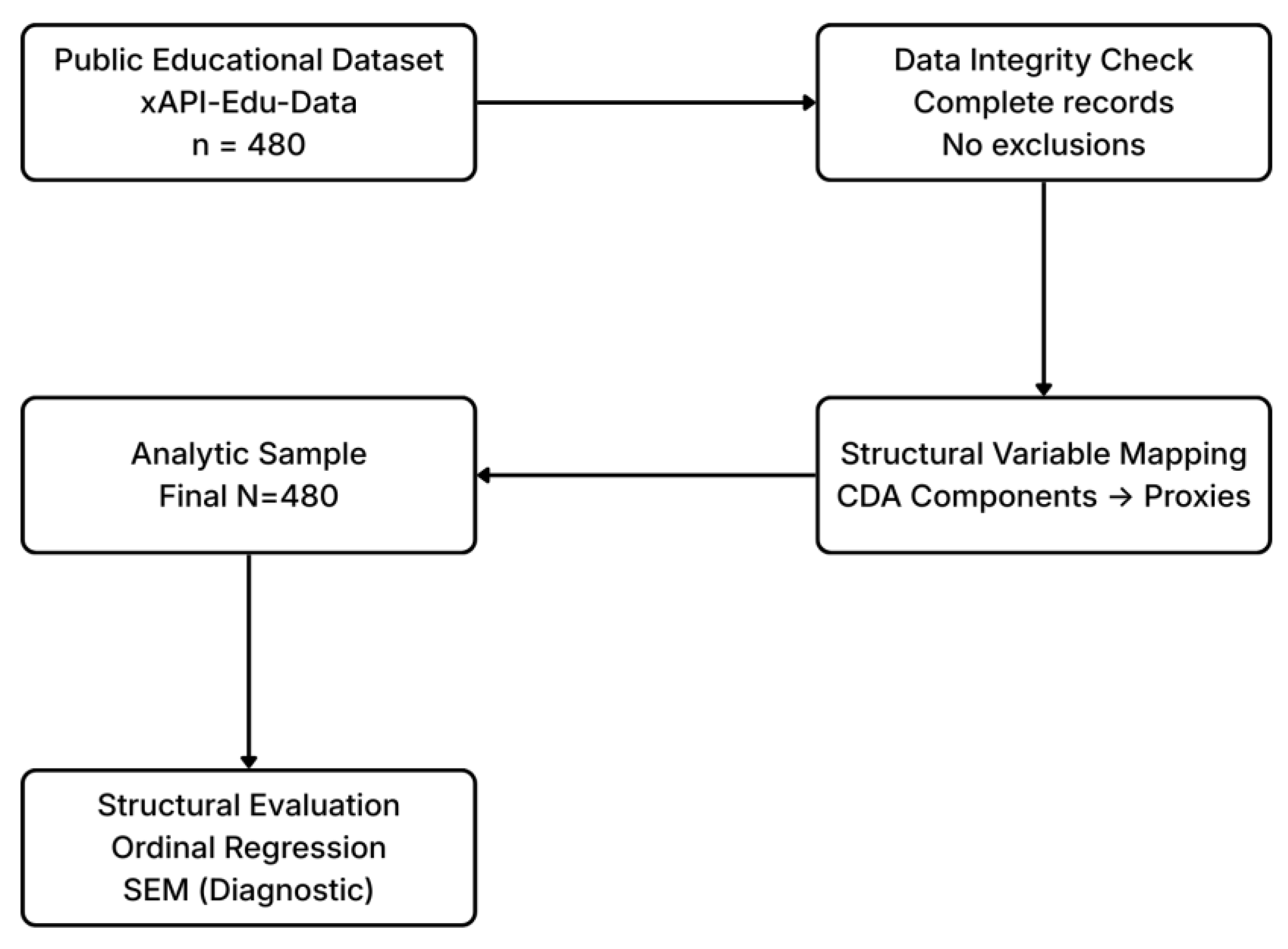
The present study uses a secondary, observational educational dataset to evaluate the empirical tractability of the structural variables proposed by Cognitive Drive Architecture (CDA). Analyses were conducted using the Students’ Academic Performance Dataset (xAPI-Edu-Data), a publicly available dataset derived from a learning management system (LMS) environment that records student behavioural, demographic, and academic indicators (Amrieh et al., 2015, 2016).
The dataset comprises 480 student records collected across two academic semesters in a middle- and secondary-school educational context. Available variables include demographic attributes (e.g., gender, nationality), academic structure (e.g., grade level, course topic), and fine-grained behavioural engagement indicators (e.g., classroom participation, resource access, discussion activity). The dataset contains no missing values, eliminating the need for imputation and reducing risks associated with biased case exclusion.
The study adopts a non-experimental, correlational design. No variables are manipulated, and no causal inferences are drawn. The analytic objective is structural feasibility testing: to assess whether CDA’s theoretical components can be approximated using naturally occurring behavioural data and whether their relationships exhibit patterns consistent with the proposed architecture.
The use of a secondary educational dataset serves three purposes. First, it provides a feasibility calibration step prior to resource-intensive experimental paradigms. Second, educational environments offer sustained, effort-relevant behaviour under real-world constraints, making them suitable for examining initiation, engagement, stabilisation, resistance, and variability. Third, reliance on observational data ensures a conservative inferential scope, positioning results as preliminary structural consistency checks rather than confirmatory tests.
Accordingly, this dataset is treated as an initial anchoring environment rather than a definitive testbed for CDA or Lagun’s Law.
Figure 2 illustrates the analytic pipeline from dataset selection and integrity verification through structural variable mapping and final model-based evaluation. The workflow reflects a feasibility-orientated, non-causal design focused on empirical tractability rather than exclusion-based data screening.
4.2. Variable Operationalization
Cognitive Drive Architecture defines structural variables rather than directly observable psychological states. Empirical analysis, therefore, relies on behavioural proxies. All operationalisations are treated as provisional anchoring points rather than definitive measurements of the underlying constructs.
Each CDA variable was mapped to one or more dataset features based on conceptual correspondence rather than surface similarity. Mapping decisions prioritised variables that (i) precede or constrain task execution, (ii) plausibly reflect readiness, engagement, stabilisation, or resistance, and (iii) are interpretable within the limits of an LMS-based educational context.
No proxy is assumed to exhaust the construct it represents. The goal is transparency and plausibility rather than constructing closure.
Table 1 summarises the mapping between CDA variables and dataset proxies.
Proxies are evaluated relative to the qualitative constraints imposed by Lagun’s Law, not as standalone psychometric indicators. Weak or non-significant effects are therefore theoretically informative, as they may reflect proxy mismatch rather than failure of the underlying structural hypothesis. This feature is treated as a guide for future experimental refinement rather than as a limitation.
4.3. Statistical Analyses
Analyses were conducted in two complementary stages, selected to align with the study’s non-causal and structural objectives.
4.3.1. Regression Modeling
Initial analyses employed regression models predicting academic performance category (low, middle, high) from CDA-mapped variables. Although the outcome variable is ordinal, linear regression was used as a descriptive approximation to assess directional consistency and relative contribution of predictors. Robustness checks using alternative specifications yielded substantively similar patterns.
Regression analysis served two purposes. First, it assessed whether proxies corresponding to ignition, mobilisation, stabilisation, and resistance exhibited distinct and interpretable associations with performance. Second, it evaluated whether any single variable dominated the model, which would undermine the claim that Drive is structurally distributed rather than reducible to motivation or engagement alone.
Regression coefficients are not interpreted as causal effects or as parameter estimates of Lagun’s Law.
4.3.2. Structural Equation Modeling
To evaluate structural plausibility at the system level, a secondary analysis employed structural equation modelling (SEM). SEM permits simultaneous estimation of multiple relationships and is therefore appropriate for assessing whether the proposed configuration of variables is internally coherent when treated as an interacting system.
SEM is used diagnostically rather than confirmatorily. The aim is to assess whether the observed data are grossly incompatible with the hypothesised structure, not to establish formal causal or mechanistic validity.
Accordingly:
SEM paths are interpreted as structural consistencies rather than causal mechanisms.
Model fit indices are treated as screening tools rather than validation criteria.
Alternative plausible structural configurations are acknowledged.
4.4. Methodological Scope Statement
This methodology is intentionally conservative. The study does not claim:
causal identification,
construct validation of CDA variables,
parameter confirmation of Lagun’s Law, or
closure of the CDA field.
Instead, it demonstrates that CDA’s variables can be operationalised transparently, analysed coherently, and interpreted without contradiction when applied to real-world behavioural data. This establishes a necessary, but not sufficient, foundation for subsequent experimental, longitudinal, and intervention-based tests.
5. Results
5.1. Sample Characteristics and Descriptive Statistics
The analytic sample comprised 480 students with complete observations across all demographic, behavioural, attendance, parental involvement, and academic performance variables. No missing data were present, and all analyses were conducted on the full sample without imputation or case exclusion.
Academic performance outcomes were distributed across all three achievement categories. A total of 211 students (44.0%) were classified as middle-performing, 142 students (29.6%) as high-performing, and 127 students (26.5%) as low-performing, indicating adequate outcome variability without severe class imbalance.
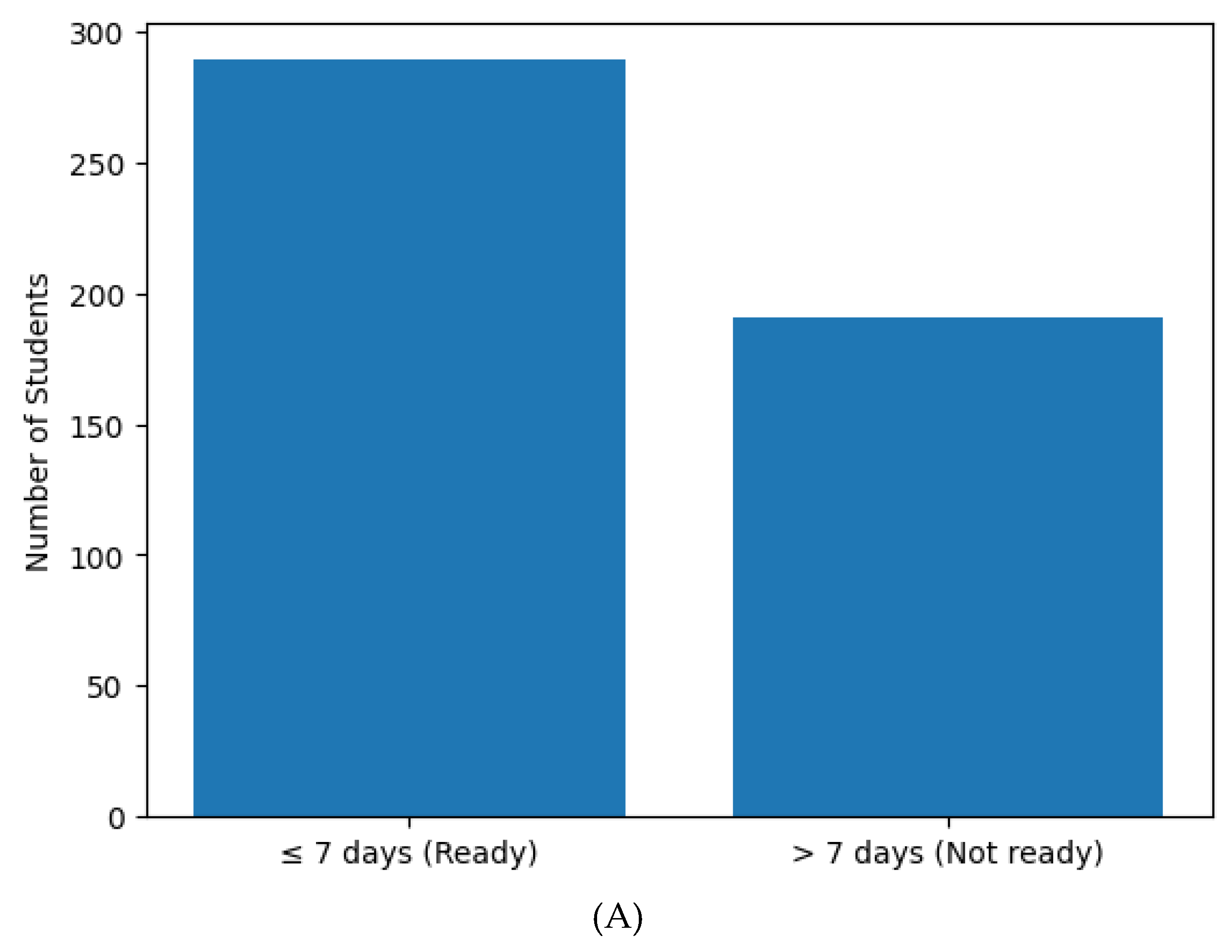
Attendance-based readiness, used as the empirical proxy for Primode, exhibited a thresholded distribution. A total of 289 students (60.2%) fell below the seven-day absence threshold, whereas 191 students (39.8%) exceeded it. This bimodal pattern is consistent with attendance functioning as a gating variable rather than a continuous engagement measure.
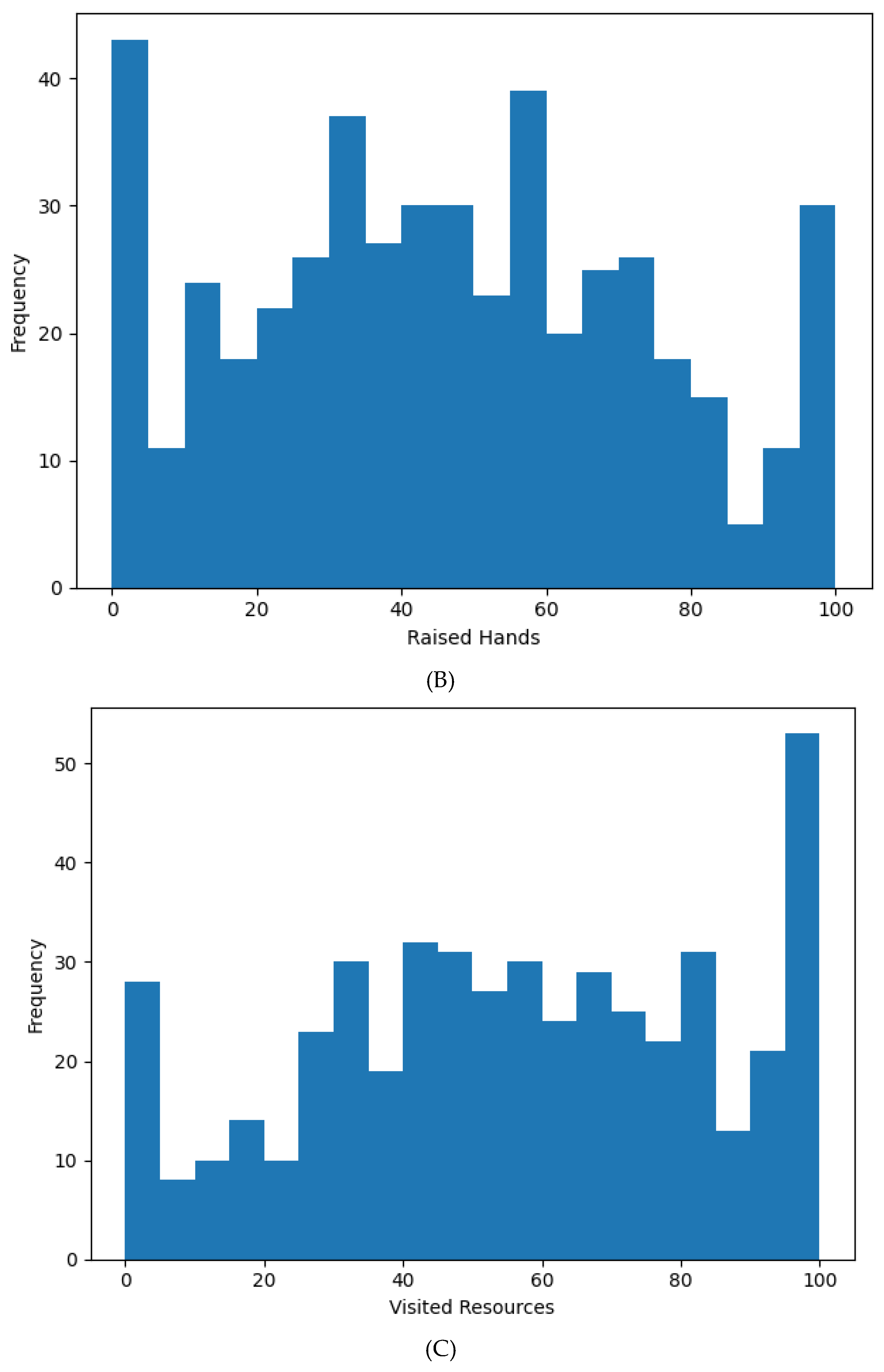
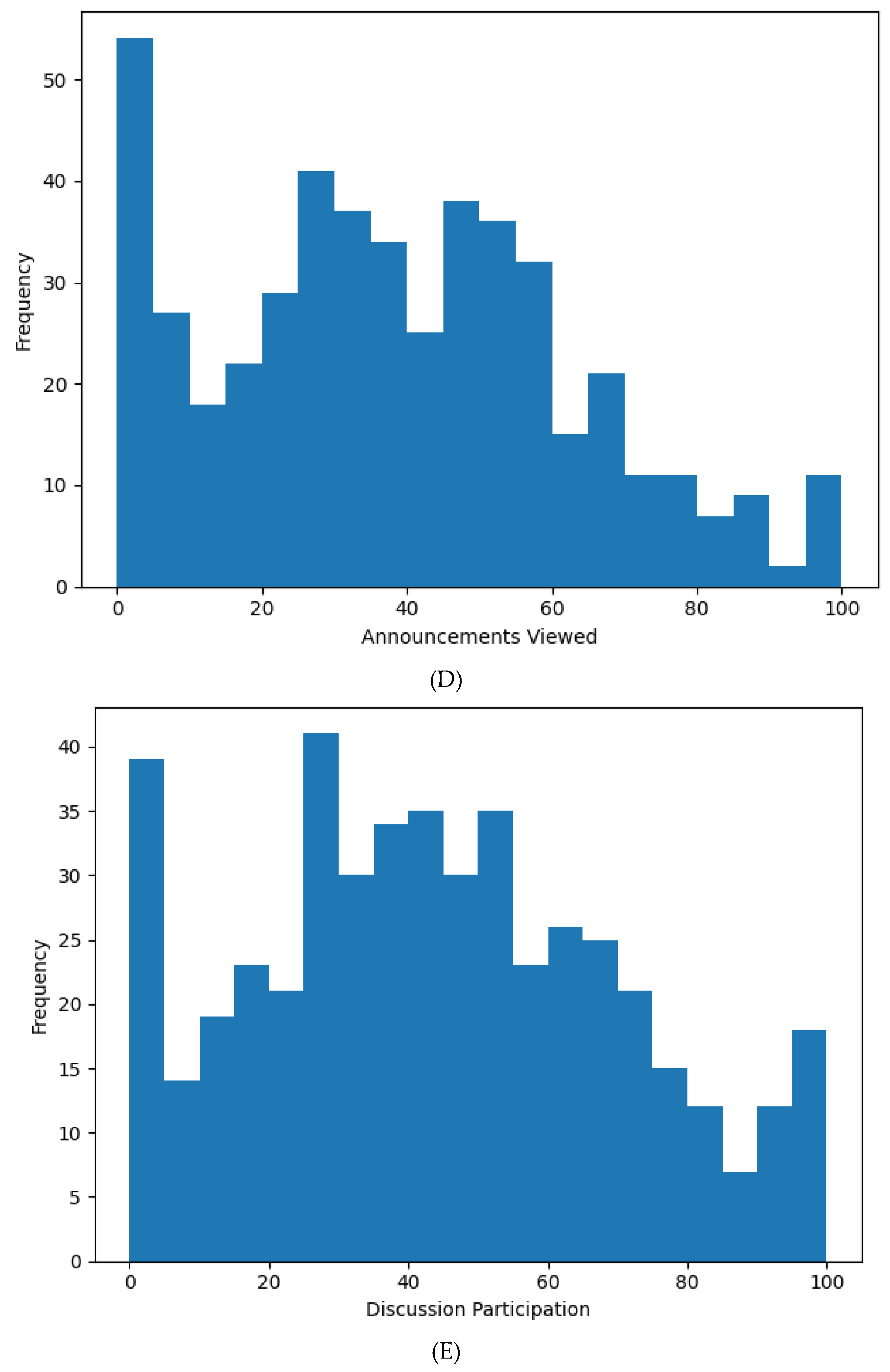
Behavioural engagement variables showed substantial dispersion and right-skewed distributions characteristic of learning management system data. Classroom participation (raised hands) ranged from 0 to 100 instances (mean = 46.78, SD = 30.78; median = 50). Resource visitation exhibited a higher mean (54.80, SD = 33.08), while announcement viewing was lower on average (mean = 37.92, SD = 26.61) and more strongly skewed. Discussion participation also showed wide inter-individual variability (mean = 43.28, SD = 27.64).
Parental involvement and satisfaction variables, used as resistance-related indicators, were distributed across categories with sufficient balance for modelling. A total of 270 parents (56.3%) completed school surveys, and 292 parents (60.8%) reported satisfaction with the school.
Descriptive statistics for all CDA-mapped variables are reported in
Table 2A–C, and distributional characteristics of readiness and behavioural engagement variables are illustrated in
Figure 3A–E.
Table 2A.
Continuous behavioral engagement variables.
Table 2A.
Continuous behavioral engagement variables.
| Variable |
Mean |
SD |
Min |
25% |
Median |
75% |
Max |
| Raised Hands |
46.78 |
30.78 |
0 |
15.75 |
50 |
75 |
100 |
| Visited Resources |
54.80 |
33.08 |
0 |
20 |
65 |
84 |
99 |
| Announcements Viewed |
37.92 |
26.61 |
0 |
14 |
33 |
58 |
98 |
| Discussion Participation |
43.28 |
27.64 |
1 |
20 |
39 |
70 |
99 |
Table 2B.
Readiness (Primode) indicator.
Table 2B.
Readiness (Primode) indicator.
| Variable |
Category |
n |
% |
| Student Absence Days (Primode) |
≤ 7 days |
289 |
60.2 |
| |
> 7 days |
191 |
39.8 |
Table 2C.
Resistance-related contextual indicators.
Table 2C.
Resistance-related contextual indicators.
| Variable |
Category |
n |
% |
| Parent Survey Completion |
Completed |
270 |
56.3 |
| |
Not completed |
210 |
43.7 |
| Parent Satisfaction |
Satisfied |
292 |
60.8 |
| |
Dissatisfied |
188 |
39.2 |
5.2. Strongly Supported Structural Components
Three components of Lagun’s Law (Primode, Cognitive Activation Potential (CAP), and Grain) showed strong, directionally consistent associations with academic performance across all estimated models. These components exhibited the largest effect sizes, high statistical stability, and invariant directionality and are therefore classified as strongly supported under the present observational design.
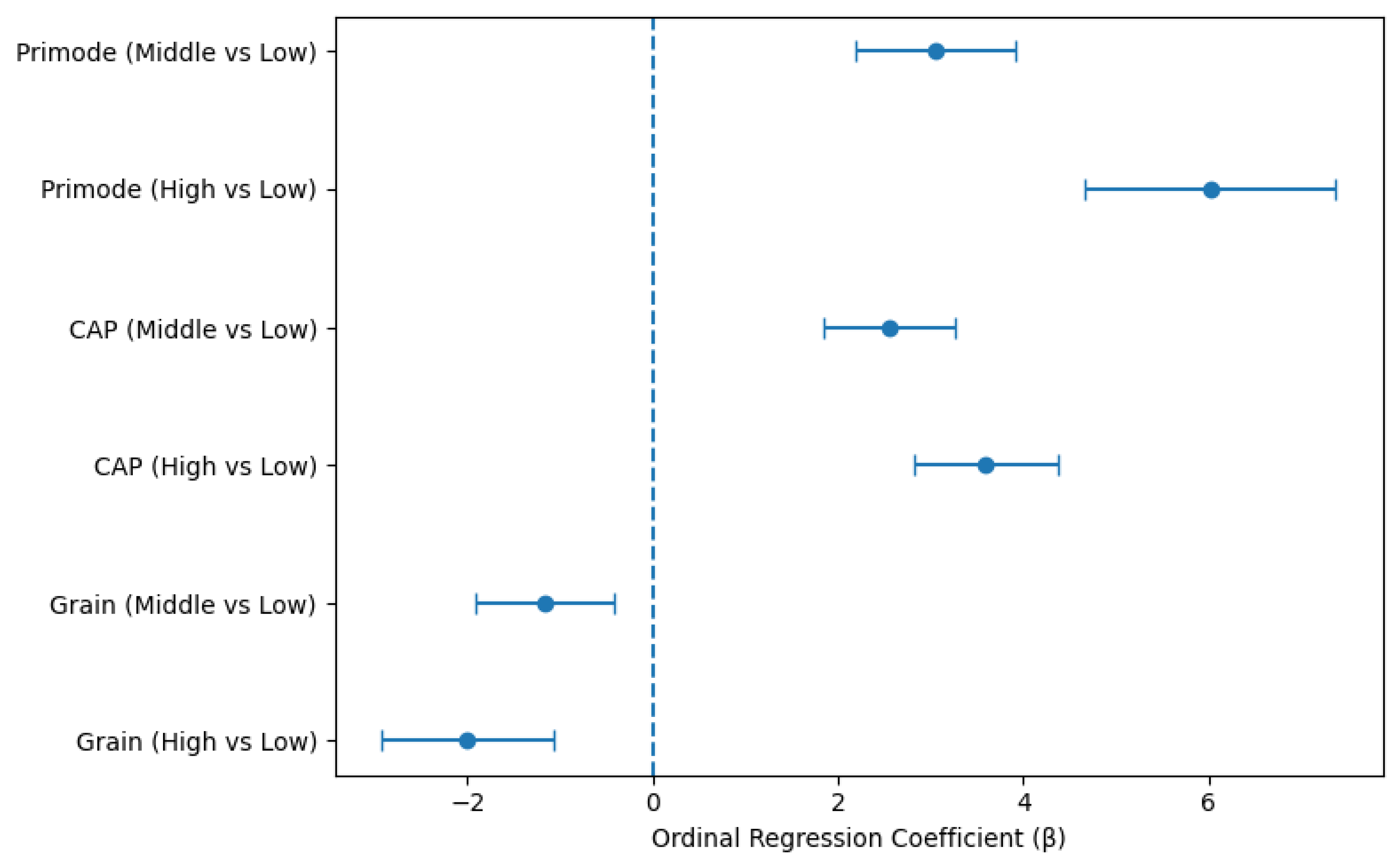
Three components of Lagun’s Law (Primode, Cognitive Activation Potential (CAP), and Grain) showed strong, directionally consistent associations with academic performance across all estimated models. These components exhibited the largest effect sizes, high statistical stability, and invariant directionality and are therefore classified as strongly supported under the present observational design. The relative magnitude and direction of these effects across outcome contrasts are visualised in
Figure 4, while full numerical estimates are reported in
Table 3.
Points indicate β estimates from multinomial ordinal regression predicting academic performance category (middle vs. low; high vs. low), with horizontal bars representing 95% confidence intervals. Positive coefficients indicate increased odds of higher performance categories, whereas negative coefficients indicate suppressive effects. Ignition readiness (Primode) shows the largest effects across contrasts, followed by Cognitive Activation Potential (CAP), while resistance (Grain) exhibits consistent negative associations.
5.2.1. Primode (Ignition Readiness)
Primode emerged as the dominant predictor of academic performance. In the multinomial ordinal regression model, students classified as ready (fewer than seven absences) showed substantially higher odds of belonging to higher performance categories.
Relative to low-performing students, Primode was associated with increased odds of middle performance (β = 3.05, SE = 0.44, z = 6.96, p < .001) and high performance (β = 6.02, SE = 0.69, z = 8.67, p < .001), with full estimates reported in
Table 3. Confidence intervals did not approach zero, indicating strong and stable effects.
Across all model specifications, Primode retained the largest coefficient magnitude among CDA components. Directionality was uniformly positive, and no specification produced attenuation sufficient to eliminate statistical significance.
5.2.2. Cognitive Activation Potential (CAP)
CAP, operationalised as a standardised composite of behavioural engagement indicators, showed robust positive associations with academic performance conditional on readiness. CAP was associated with increased odds of middle performance (β = 2.55, SE = 0.36, z = 7.18, p < .001) and high performance (β = 3.60, SE = 0.40, z = 9.09, p < .001), as reported in
Table 3.
Although smaller in magnitude than Primode, CAP effects exceeded those of stabilising or resistance-related components. CAP remained statistically significant after adjustment for readiness and resistance, indicating that engagement-related mobilisation contributed independently to performance outcomes.
5.2.3. Grain (Resistance)
Grain-related proxies showed reliable suppressive associations with academic performance. Grain was negatively associated with middle performance (β = −1.16, SE = 0.38, z = −3.03, p = .002) and high performance (β = −2.00, SE = 0.47, z = −4.25, p < .001), with estimates reported in
Table 3.
Although smaller in absolute magnitude than Primode and CAP, Grain effects were statistically stable and directionally invariant. The magnitude of the negative association increased at higher performance thresholds.
5.2.4. Relative Strength and Model Consistency
Across all estimated models, the relative ordering of component strength was preserved:
This hierarchy held across outcome contrasts and model specifications. All three components showed consistent directionality, stable confidence intervals, and strong likelihood-ratio test support (pseudo-R
2 = 0.47, p < .001). No sign reversals or suppression effects were observed. Full coefficient estimates are reported in
Table 3. Also, this ordering is visually evident in
Figure 4, which shows a clear separation between positive ignition and mobilisation effects and the suppressive influence of resistance across contrasts.
5.3. Partially Supported Structural Component
5.3.1. Anchory (Stabilization)
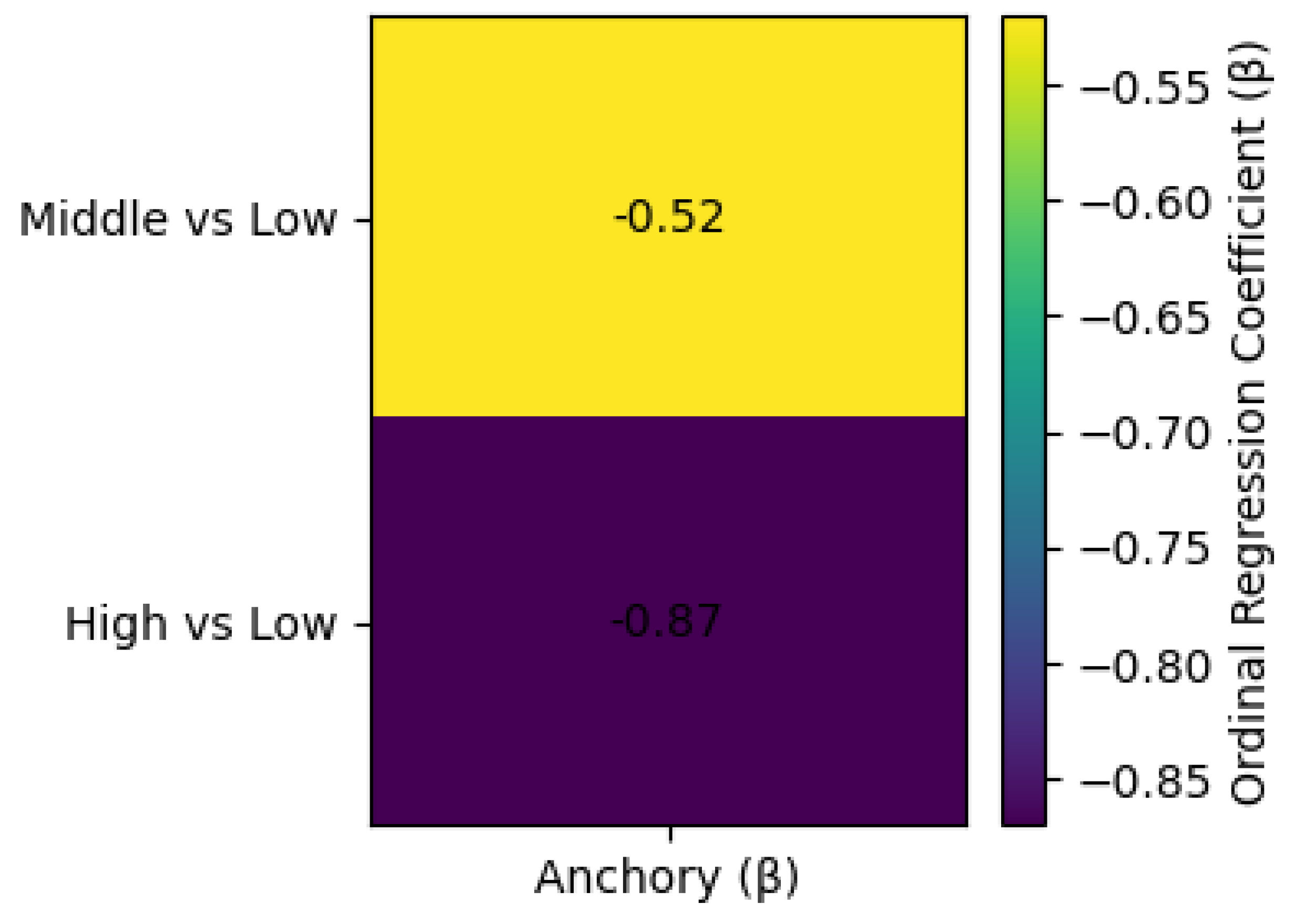
Anchory, operationalised via standardised discussion participation, showed modest but statistically consistent associations with academic performance across model specifications. When entered jointly with Primode, CAP, and Grain in the multinomial ordinal regression model, Anchory was associated with lower odds of both middle and high performance relative to low performance.
Anchory, operationalised via standardised discussion participation, showed modest but statistically consistent associations with academic performance across model specifications. When entered jointly with Primode, CAP, and Grain in the multinomial ordinal regression model, Anchory was associated with lower odds of both middle and high performance relative to low performance, as illustrated in
Figure 5.
Cell values represent ordinal regression coefficients (β) for Anchory predicting academic performance contrasts (middle vs. low; high vs. low). More negative values indicate stronger suppressive associations. Anchory shows consistent negative effects across outcome thresholds, with a larger magnitude for higher performance contrasts, supporting its classification as a secondary, partially supported structural component.
Specifically, Anchory was negatively associated with middle performance (β = −0.52, SE = 0.24, z = −2.14, p = .033) and high performance (β = −0.87, SE = 0.29, z = −2.97, p = .003), with full coefficient estimates reported in
Table 4. These associations remained statistically significant after adjustment for readiness, engagement, and resistance proxies.
Although Anchory effects were directionally consistent across outcome thresholds, their magnitudes were substantially smaller than those observed for Primode and CAP. Inclusion of Anchory did not materially alter the coefficients, significance levels, or ordering of the strongly supported components, indicating that stabilisation-related variance was largely orthogonal to ignition and mobilisation effects.
Model fit improved marginally with the inclusion of Anchory (pseudo-R2 = 0.478 versus 0.469), suggesting incremental explanatory contribution without restructuring the overall model. Likelihood-ratio tests continued to support the joint model specification (p < .001).
The negative direction of the Anchory coefficients should be interpreted cautiously. Discussion participation within learning management systems may reflect heterogeneous behavioural processes, including sustained engagement, compensatory effort in response to difficulty, or increased interaction under instructional strain. As such, the Anchory proxy likely captures mixed stabilisation-relevant dynamics rather than a unidimensional construct.
Overall, the results indicate that stabilisation-related structure is empirically detectable in the dataset, but its contribution to performance outcomes is secondary relative to ignition readiness and motivational amplification. Anchory, therefore, meets the criteria for partial support under the present observational design.
5.4. Proxy-Limited and Exploratory Components
Two components of Lagun’s Law, Flexion (task–system adaptability) and Slip (structural entropy), were treated as exploratory due to limitations in proxy resolution and temporal granularity. As anticipated, neither component showed strong or stable associations with academic performance outcomes in the present dataset.
5.4.1. Flexion (Task–System Adaptability)
Flexion was operationalised using coarse indicators of curricular alignment, defined by the interaction of grade level and subject topic. In models including Primode, CAP, Grain, and Anchory, Flexion did not show statistically significant associations with academic performance at either outcome threshold.
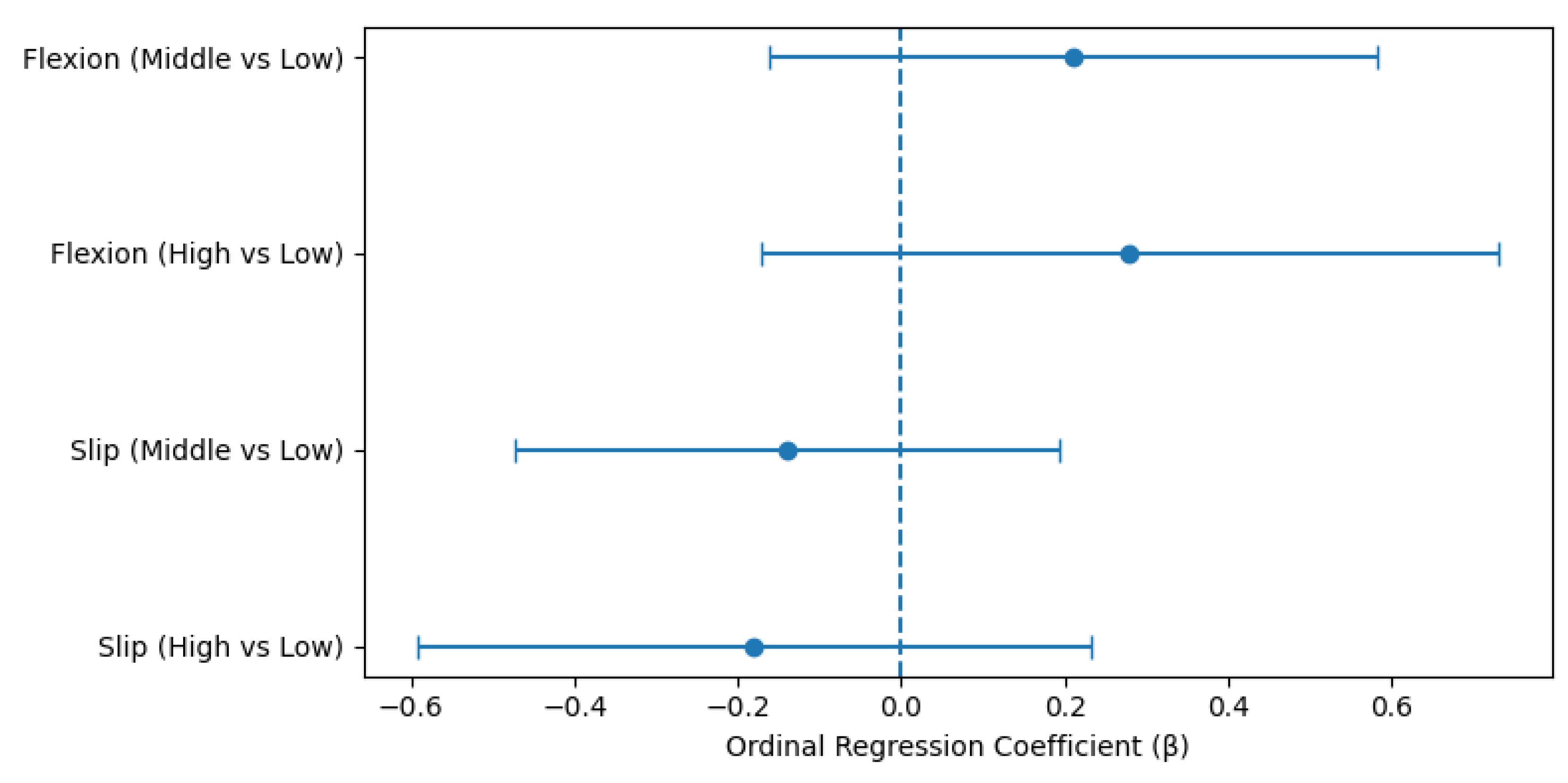
Coefficient estimates for Flexion were small in magnitude and varied modestly across specifications (|β| < 0.30), with no contrast reaching statistical significance (p > .10 in all cases). Full estimates are reported in
Table 5. The magnitude and uncertainty of these effects are illustrated in
Figure 6, which shows that confidence intervals for both Flexion and Slip span zero across outcome contrasts. Inclusion of Flexion did not materially improve model fit, nor did it alter the magnitude or significance of other CDA components.
The absence of a stable Flexion effect is consistent across both middle- and high-performance contrasts. Confidence intervals were wide relative to point estimates, indicating limited precision under the current proxy specification.
These results suggest that static curricular indicators provide limited leverage for capturing adaptability-related structure. No evidence was observed that Flexion proxies independently explained variance in performance outcomes beyond that accounted for by readiness, engagement, stabilisation, and resistance measures.
5.4.2. Slip (Structural Entropy)
Slip was approximated using within-class performance dispersion as a group-level indicator of outcome variability. As expected, Slip did not function as a direct predictor of individual academic performance.
Across all model specifications, Slip coefficients were small in magnitude and statistically non-significant for both middle- and high-performance contrasts (|β| < 0.20, p > .20). Estimates are reported in
Table 5. Inclusion of Slip did not materially affect model fit or alter coefficients of other predictors.
Although Slip did not explain mean-level differences in performance categories, residual variance remained substantial across all estimated models, even after inclusion of strongly supported structural components. This pattern indicates that unexplained variability persists despite accounting for ignition readiness, mobilisation, stabilisation, and resistance.
Slip, therefore, behaves consistently with its role as a variability term rather than a directional predictor. No evidence was observed that Slip proxies captured systematic performance differences at the individual level under the present operationalisation.
6. Discussion
The present study examined the empirical tractability of Cognitive Drive Architecture and its canonical formulation, Lagun’s Law, using a secondary educational dataset. Across all model specifications, academic performance outcomes were most strongly associated with ignition readiness (Primode), motivational amplification (Cognitive Activation Potential), and resistance (Grain), while stabilisation and adaptability-related components exhibited weaker or proxy-limited effects. This pattern provides convergent support for the central structural claims of CDA and clarifies the relative contribution of its constituent variables under observational conditions.
Ignition readiness emerged as the dominant determinant of performance category membership. Students classified as ready to engage showed substantially higher odds of both middle and high academic performance, independent of engagement-related behaviour and resistance proxies. The magnitude and stability of this effect across outcome thresholds indicate that readiness functions as a structural gating condition rather than a marginal correlate. When readiness was absent, performance was suppressed even when engagement behaviours were present, suggesting that initiation failure reflects a structural constraint rather than insufficient motivation or value.
Motivational amplification, operationalised as Cognitive Activation Potential, showed strong positive associations with performance conditional on readiness. CAP effects were consistently smaller than those of Primode but exceeded those of stabilisation and resistance-related components. Importantly, CAP retained statistical significance after adjustment for readiness and resistance, indicating that engagement-related mobilisation contributes independently to performance outcomes once ignition conditions are satisfied. This conditional relationship clarifies why motivational interventions often produce variable effects: amplification mechanisms operate effectively only when readiness thresholds have already been crossed.
Resistance-related proxies exhibited reliable suppressive associations with academic performance across all models. Grain effects were directionally invariant and increased in magnitude at higher performance thresholds, indicating that resistance disproportionately constrains higher levels of sustained achievement rather than minimal engagement. This pattern aligns with effort-cost and cognitive control perspectives while extending them by situating resistance within a broader structural system governing effort availability.
Stabilisation-related effects were detectable but secondary. Anchory, operationalised via discussion participation, showed modest and statistically consistent associations with performance, but these effects were substantially smaller than those of readiness and mobilisation and did not alter the ordering or magnitude of strongly supported components. Given the heterogeneous nature of discussion participation in learning management systems, Anchory proxies likely captured mixed behavioural processes rather than a pure stabilisation signal. Nonetheless, the presence of consistent secondary effects supports the inclusion of stabilisation as a modulatory component within Lagun’s Law.
Adaptability and entropy-related components were empirically quiet under the present operationalisation. Flexion, approximated using static curricular alignment indicators, did not show stable associations with performance outcomes, consistent with its theoretical definition as a dynamic, moment-to-moment structural property that is not well captured by coarse educational variables. Slip, approximated using within-class performance dispersion, did not function as a directional predictor of mean performance, as expected for a structural entropy term. The persistence of unexplained variance across all models, despite strong effects for readiness, mobilisation, and resistance, is consistent with the necessity of an explicit variability component in the law.
Taken together, the findings support a structural account of effort expression in which Drive emerges from the interaction of readiness, mobilisation, and resistance rather than from engagement frequency or motivational strength alone. The results are consistent with the claim that effort initiation is conditionally available and structurally constrained, providing a coherent empirical foundation for further experimental investigation of CDA and Lagun’s Law.
6.1. Limitations
Several limitations constrain the interpretation of the present findings. First, all CDA components were operationalised using proxy variables derived from an existing educational dataset. While proxies were selected based on conceptual correspondence, they provide indirect approximations of latent structural variables such as Primode, Anchory, Flexion, and Slip. Observed effect sizes, therefore, reflect structural detectability rather than precise parameter estimates, particularly for secondary and exploratory components.
Second, the study employs an observational, non-experimental design. No causal claims are made regarding the necessity or sufficiency of individual CDA components. The analytic goal was to assess statistical coherence, directional consistency, and empirical tractability rather than causal validation. Experimental manipulation of readiness, mobilisation, and resistance will be required to test the postulates of Lagun’s Law directly.
Third, academic performance was measured as an ordinal outcome, limiting sensitivity to fine-grained variation in Drive magnitude. Although ordinal regression provides a conservative test of directional effects, continuous or time-resolved performance measures would offer greater power to detect nonlinear dynamics and interaction effects predicted by the law.
Fourth, the dataset lacks the temporal resolution necessary to examine initiation latency, within-task variability, and collapse–recovery dynamics of effort. As a result, Lagun’s Law is evaluated here in a static, cross-sectional form rather than as a fully dynamic system. Temporal dynamics remain a central theoretical feature of CDA that cannot be assessed using the present data.
Finally, the reliance on secondary data reflects practical constraints related to resources and access to experimental infrastructure. This limitation was accepted deliberately as part of a phased research strategy aimed at establishing feasibility and structural coherence prior to investment in purpose-built experimental paradigms.
7. Conclusions
The present study provides a formal derivation and initial empirical calibration of Lagun’s Law, a canonical structural relation proposed within Cognitive Drive Architecture to characterise the conditions under which volitional effort becomes possible. By deriving the law from explicit structural postulates and examining its empirical tractability using a large, naturalistic educational dataset, the study advances effort research toward a more mechanistic and formally constrained account of effort initiation and expression.
Across multiple analytic specifications, core structural components (ignition readiness, motivational amplification, and resistance) were consistently detectable in real-world behavioural data, even under coarse proxy-based operationalisation. These findings indicate that the proposed structural variables are not merely theoretical abstractions but can be meaningfully anchored in observed behaviour. Secondary components related to stabilisation, adaptability, and variability showed weaker or proxy-limited effects, delineating empirical boundary conditions rather than contradicting the underlying structural formulation.
Importantly, the study does not claim causal validation or theoretical closure. Instead, it establishes feasibility, coherence, and falsifiability as necessary prerequisites for systematic experimental investigation. By providing a fully specified structural law, transparent empirical mappings, and a clear pathway for experimental testing, this work positions Lagun’s Law as a tractable object for future research aimed at refining, testing, or revising structural accounts of effort initiation, stabilisation, and collapse.
Funding
The authors received no financial support for the preparation of this manuscript.
Institutional Review Board Statement
No ethical approval was required as the study involved secondary analysis of fully anonymised, publicly accessible data.
Data Availability Statement
The data analysed in this study are publicly available and were obtained from the xAPI-Edu-Data dataset hosted on Kaggle (
https://www.kaggle.com/datasets/aljarah/xAPI-Edu-Data). The dataset is fully de-identified, contains no personally identifiable or sensitive information, and is distributed under an open-access licence for research and educational use. No restrictions apply to access or reuse of the data, and no permission from the data providers was required for secondary analysis.
Conflicts of Interest
The authors declare no conflicts of interest for this work.
References
- Ajzen, I. The theory of planned behavior. Organizational Behavior and Human Decision Processes 1991, 50(2), 179–211. [Google Scholar] [CrossRef]
- Amrieh, E. A., Hamtini, T., & Aljarah, I. (2015, November). Preprocessing and analyzing educational data set using X-API for improving student's performance. In 2015 IEEE Jordan conference on applied electrical engineering and computing technologies (AEECT) (pp. 1-5). IEEE. [CrossRef]
- Amrieh, E. A.; Hamtini, T.; Aljarah, I. Mining educational data to predict student’s academic performance using ensemble methods. International journal of database theory and application 2016, 9(8), 119–136. [Google Scholar] [CrossRef]
- Atkinson, J. W. Motivational determinants of risk-taking behavior. Psychological Review 1957, 64(6(Pt.1), 359–372. [Google Scholar] [CrossRef] [PubMed]
- Bandura, A. Self-efficacy: Toward a unifying theory of behavioral change. Psychological Review 1977, 84(2), 191–215. [Google Scholar] [CrossRef]
- Baumeister, R. F.; Heatherton, T. F. Self-regulation failure: An overview. Psychological Inquiry 1996, 7(1), 1–15. [Google Scholar] [CrossRef]
- Botvinick, M. M. Conflict monitoring and decision making: reconciling two perspectives on anterior cingulate function. Cognitive, affective & behavioral neuroscience 2007, 7(4), 356–366. [Google Scholar] [CrossRef]
- Deci, E.L.; Ryan, R.M. Intrinsic Motivation and Self-Determination in Human Behavior; Plenum Press: New York, 1985. [Google Scholar] [CrossRef]
- Deci, E. L.; Ryan, R. M. The “What” and “Why” of Goal Pursuits: Human Needs and the Self-Determination of Behavior. Psychological Inquiry 2000, 11(4), 227–268. [Google Scholar] [CrossRef]
- Duckworth, A. L.; Peterson, C.; Matthews, M. D.; Kelly, D. R. Grit: perseverance and passion for long-term goals. Journal of personality and social psychology 2007, 92(6), 1087–1101. [Google Scholar] [CrossRef]
- Eccles, J. S.; Wigfield, A. Motivational Beliefs, Values, and Goals. Annual Review of Psychology 2002, 53, 109–132. [Google Scholar] [CrossRef]
- Ferrari, J. R. Procrastination as self-regulation failure of performance: Effects of cognitive load, self-awareness, and time limits on 'working best under pressure. European Journal of Personality 2001, 15(5), 391–406. [Google Scholar] [CrossRef]
- Inzlicht, M.; Schmeichel, B. J.; Macrae, C. N. Why self-control seems (but may not be) limited. Trends in Cognitive Sciences 2014, 18(3), 127–133. [Google Scholar] [CrossRef] [PubMed]
- Kool, W.; Botvinick, M. The intrinsic cost of cognitive control. Behavioral and Brain Sciences 2013, 36(6), 697–698. [Google Scholar] [CrossRef] [PubMed]
- Kurzban, R.; Duckworth, A.; Kable, J. W.; Myers, J. An opportunity cost model of subjective effort and task performance. The Behavioral and brain sciences 2013, 36(6), 661–679. [Google Scholar] [CrossRef] [PubMed]
- Lagun, N. Lagun's law and the foundations of cognitive drive architecture: A first principles theory of effort and performance. International Journal of Science and Research Archive 2025. [Google Scholar] [CrossRef]
- Lieder, F.; Griffiths, T. L. Resource-rational analysis: Understanding human cognition as the optimal use of limited computational resources. The Behavioral and brain sciences 2019, 43, e1. [Google Scholar] [CrossRef]
- Pessoa, L. How do emotion and motivation direct executive control? Trends in cognitive sciences 2009, 13(4), 160–166. [Google Scholar] [CrossRef]
- Shenhav, A.; Botvinick, M. M.; Cohen, J. D. The expected value of control: an integrative theory of anterior cingulate cortex function. Neuron 2013, 79(2), 217–240. [Google Scholar] [CrossRef]
- Solomon, L. J.; Rothblum, E. D. Academic procrastination: Frequency and cognitive-behavioral correlates. Journal of Counseling Psychology 1984, 31(4), 503–509. [Google Scholar] [CrossRef]
- Steel, P. The nature of procrastination: A meta-analytic and theoretical review of quintessential self-regulatory failure. Psychological Bulletin 2007, 133(1), 65–94. [Google Scholar] [CrossRef]
- Vroom, V.H. Work and motivation; Wiley, 1964. [Google Scholar]
- Westbrook, A.; Frank, M. J.; Cools, R. A mosaic of cost-benefit control over cortico-striatal circuitry. Trends in cognitive sciences 2021, 25(8), 710–721. [Google Scholar] [CrossRef]
- Westbrook, A.; Lamichhane, B.; Braver, T. The Subjective Value of Cognitive Effort is Encoded by a Domain-General Valuation Network. The Journal of neuroscience: the official journal of the Society for Neuroscience 2019, 39(20), 3934–3947. [Google Scholar] [CrossRef]
|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).