Submitted:
12 June 2025
Posted:
12 June 2025
You are already at the latest version
Abstract
Addressing the dual challenges of decoherence and data overhead in practical quantum systems, we introduce a novel Difference-based Variational Reconstruction (DVR) framework for adaptive quantum control and efficient signal compression. Through numerical experiments, we demonstrate that DVR enables high-fidelity quantum control even under strong decoherence, achieving final fidelities exceeding 0.93 across a range of damping strengths ($\gamma = 0.5$, $0.8$, $1.2$), while maintaining purity close to 1. Simultaneously, DVR compresses observable trajectories by exploiting their intrinsic difference-based structure, providing scalable low-rank approximations that significantly reduce storage and computational complexity. Our results show that DVR forms a unified formalism for both real-time control and offline analysis of quantum dynamics, paving the way for resource-efficient quantum experiments and robust device characterization.
Keywords:
quantum control
; quantum diagnostics
; Difference-based Variational Reconstruction (DVR)
; adaptive control
; decoherence
; signal compression
; quantum information
; open quantum systems
; Hamiltonian learning
1. Introduction
Quantum technologies promise transformative applications in computing, communication, and sensing [1,2]. These developments form the foundation of the so-called “second quantum revolution” [3], with global initiatives targeting scalable and fault-tolerant quantum devices [4,5]. However, realizing practical quantum systems faces two critical challenges: mitigating decoherence and managing the increasing data complexity as quantum system size grows [6,7].
Decoherence, the process by which quantum systems lose their coherence due to interactions with the environment, poses a fundamental obstacle to reliable quantum information processing [8,9]. Simultaneously, precise quantum control in the presence of such noise remains a difficult problem [10,11]. As systems scale, quantum simulations and experiments generate vast quantities of data, exacerbating the curse of dimensionality and necessitating efficient compression schemes [12,13,14].
Existing quantum control strategies, including gradient-based methods such as GRAPE [15] and Krotov [16], have advanced the field but often require significant computational resources and can be sensitive to noise [17]. Meanwhile, efforts at compressing quantum information using tensor network states (e.g., MPS, MPO) [18,19,20] or reduced-order models [21] are well established, yet most operate independently from control strategies.
To address these dual challenges, we introduce the Difference-based Variational Reconstruction (DVR) framework. DVR is a novel approach that represents quantum trajectories through structured finite differences. This representation captures local dynamics efficiently and naturally lends itself to both real-time control (through adaptive matching of DVR coefficients) and signal compression (through sparse, low-order reconstructions).
In this work, we:
- Introduce the DVR framework as a unified tool for quantum control and compression.
- Demonstrate that DVR enables high-fidelity adaptive control under decoherence ( to ), achieving fidelities above 0.93 and significantly restoring purity.
- Show that DVR provides low-rank compressive representations of observable signals, scalable up to Hilbert space dimensions of .
- Validate DVR’s utility through quantitative metrics including RMSE, purity improvement, and compression ratio.
Paper Organization
The remainder of this paper is organized as follows:
- Section 2: Presents the DVR-based quantum control framework, detailing its connection to Lindblad dynamics and real-time feedback mechanisms.
- Section 3: Discusses the simulation results, including the performance metrics of DVR-based quantum control and the scalability of DVR signatures in high-dimensional quantum systems.
- Section 4: Concludes the paper by summarizing key implications and outlining future directions.
2. Local Adaptive Quantum Control with DVR: From Lindblad Dynamics to Real-Time Feedback
The Difference-based Variational Reconstruction (DVR) framework ties into the fundamental physics and mathematics of quantum control. This section develops that connection with a concrete and complete perspective.
2.1. Quantum Control as the Problem of Managing Information Carriers
At its core, quantum control addresses the challenge of manipulating quantum information encoded in qubits. These qubits may represent pure or mixed states and serve as the fundamental units in quantum algorithms and quantum sensing systems. The control goals fall into two categories:
- State Preservation: Maintaining the qubit in a fixed quantum state, preserving coherence and suppressing information loss.
- State Transformation: Driving the qubit from an initial state to a specific target state, essential for gate operations or adiabatic protocols.
2.2. Lindblad Equation: The Framework for Open-System Dynamics
In realistic settings, qubits interact with their environment. This interaction is captured by the Lindblad master equation, which governs the evolution of the system’s density matrix :
Here:
- is the total Hamiltonian, composed of intrinsic dynamics and time-dependent control fields.
- are the Lindblad operators that model decoherence and dissipation via environmental couplings.
The challenge of quantum control is to determine a control Hamiltonian that drives to a desired target state while counteracting the decoherence induced by the terms.
2.3. Motivation for Local Adaptive Control
Solving the Lindblad equation with full model-based optimal control (e.g., GRAPE, Krotov) can be computationally expensive and sensitive to model inaccuracies. Furthermore, experimental systems may deviate from assumptions in real-time. This motivates the development of adaptive control methods that:
- react to observed behavior rather than relying on precomputed control fields;
- use local feedback to update control actions in real time;
- minimize reliance on global cost function optimization.
2.4. The DVR Framework: Formal Definitions and Reconstruction Principle
Having established the need for adaptive control, we now formally define the Difference-based Variational Reconstruction (DVR) framework, which serves as our core analytical and feedback mechanism.
Remark 1
(Difference-Based Variational Reconstruction (DVR)). Let V be a finite-dimensional real vector space. The DVR framework defines a structured way to represent and reconstruct signals based on finite differences. It is built on the graded tensor algebra:
where:
- is the space of k-th order forward difference chains on V.
- is the space of diagonal symmetric tensors of order k.
Given a DVR element , the associated linear reconstruction map is defined as:
where is the initial value in the forward difference chain.
Definition 1
(Difference Chain Space ). Given a sequence define the k-th order forward difference:
Then:
Definition 2
(Diagonal Coefficient Tensors ). Let:
be the space of diagonal symmetric tensors satisfying:
These weight the importance of each direction in .
Definition 3
(DVR Tensor Algebra ). Each element is a formal sum of weighted difference chains:
where and . The following operations are defined on :
- Addition:
- Scalar multiplication:
- Reconstruction:
Definition 4
(Norm and Topology on DVR). Define a norm on by:
where is the Frobenius norm on tensors. This induces a topology on DVR, used to detect discontinuities and classify behavior.
Definition 5
(Regime Classification via DVR Norm). Let be the DVR representation at space-time point . Define:
- Laminar: if for all .
- Turbulent: if grows rapidly with k and exhibits non-decaying tails.
- Quantum-like: if DVR representation fails to converge as , indicating structural uncertainty.
These definitions establish the mathematical structures of DVR. A key property arising from this framework is its ability to reconstruct the original signal based on its hierarchical differences, as formalized by the following theorem:
Theorem 1
(Reconstruction via Hierarchical Differences and Tensors). Let be a vector representing a discrete signal. We can reconstruct any component using a series involving its differences (or derivatives, if we consider i as a continuous index) and hierarchical tensors:
Where:
- is a constant reference value (e.g., or the initial value from which differences are taken).
- is a diagonal tensor of order k (e.g., for k times), with being the i-th component at level k. These terms implicitly absorb the polynomial coefficients (like ) arising from finite difference interpolation.
- represents the k-th order forward difference of v at index i, as defined in Definition 2.
Sketch via Discrete Taylor Analogy.
Let’s consider the case where the discrete index i can be treated as a continuous variable and as a function . We can use a Taylor-style logic as a heuristic, but constructing a discrete forward difference expansion of around a reference point a (e.g., a could correspond to the first index ):
Mapping this back to the discrete index i, we choose a to correspond to a reference index, say . The terms represent a discrete "step size" from the reference. The derivatives can be precisely related to finite differences of v at or around .
If we set , and the terms involving the tensors and differences are designed to match the Taylor series expansion (or its discrete equivalent, such as Newton’s forward difference interpolation formula), we can achieve exact reconstruction for a finite number of points. For a vector of finite length, the series truncates after a finite number of terms (at most for polynomial interpolation). The coefficients in the diagonal tensors are specifically chosen to embed the coefficients of the interpolating polynomial.
For instance, in 1D, for reconstruction around :
where are the binomial coefficients, and is the k-th order forward difference starting at . The terms in our theorem capture these factors, demonstrating how the DVR framework generalizes this fundamental reconstruction principle into a tensorial form. □
2.5. The Role of DVR: A Local Diagnostic Framework
The Difference-based Variational Reconstruction (DVR) framework is used to analyze time series of quantum observables or state trajectories. It produces local descriptors of dynamical behavior via forward differences:
Here, approximates the local rate of change of the observable, i.e.,
2.6. Link to Quantum Control Theory
The evolution of the expectation value of an observable O is governed by the Heisenberg picture of dynamics (setting for simplicity):
In the closed-system limit (ignoring ), this becomes:
Thus, the Hamiltonian directly controls the observable’s rate of change.
2.7. Adaptive Control via DVR Feedback
In the DVR-based control strategy:
- 1.
- A reference trajectory for an observable is defined.
- 2.
- DVR is applied to extract — the desired local slope.
- 3.
- A short-time simulation of using the current guess for is performed.
- 4.
- The resulting observable trajectory is compared to the reference via a cost function (e.g., fidelity error, slope mismatch).
- 5.
- An optimization algorithm (e.g., BFGS) updates to minimize this mismatch, locally in time.
2.8. Fundamental Nature of DVR in Control
DVR enables a fundamentally local approach to quantum control:
- Decoherence is a local process — DVR extracts localized dynamics that reflect this reality.
- Global control methods are fragile to modeling error; DVR enables real-time adaptation using measured or estimated system behavior.
- DVR unifies compression, diagnostics, and control into a single lightweight framework based on forward differences.
DVR does not solve the Lindblad equation directly. Instead, it serves as an analytical scaffold that converts observable trajectories into actionable local feedback for adaptive Hamiltonian synthesis. This is the core conceptual power of DVR in quantum control.
3. Simulation Results
This section presents the simulation results validating the DVR-based control and compression framework. The results are organized into three parts: (i) fidelity and purity outcomes under adaptive DVR control, (ii) scalability of DVR compression with Hilbert space size, and (iii) robustness and parameter learning evaluation.
3.1. Adaptive Control Fidelity and Purity Performance
We simulate a single-qubit system under amplitude damping with . The DVR-based control loop adaptively updates the control Hamiltonian to match the ideal trajectory using local DVR coefficients. The learned Hamiltonian parameters remain consistent with the ideal:
Purity Evolution: Figure 1 shows that DVR-based control restores purity nearly to the ideal case, significantly outperforming uncontrolled evolution under all values.
Learned Hamiltonian Parameters: Figure 2 shows that the adaptive control consistently recovers the correct Hamiltonian values across all control windows.
Final Metrics:

Table 1.
Fidelity and purity metrics with DVR-based adaptive control.
| Final Fidelity | Final Purity (Controlled) | Avg. Purity (Controlled) | |
| 0.5 | 0.9614 | 0.9949 | 0.9870 |
| 0.8 | 0.9481 | 0.9988 | 0.9939 |
| 1.2 | 0.9360 | 0.9997 | 0.9965 |
3.2. Scalability of DVR Compression
To evaluate the DVR framework’s efficiency on large quantum systems, we tested its performance across Hilbert space dimensions . For each n, we computed:
- the execution time of DVR signature extraction,
- the variance and maximum jump in first-order DVR coefficient ,
- the compression ratio, defined as energy retained in the top 10 coefficients relative to the total.
Results: The DVR compression quality improves with dimension, achieving over 97.8% retention in top 10 terms at .
Table 2.
Scalability diagnostics: DVR signature statistics and compression for various Hilbert space sizes.
Table 2.
Scalability diagnostics: DVR signature statistics and compression for various Hilbert space sizes.
| n | Time (s) | Variance | Max Jump | Compression Ratio |
| 50 | 0.0182 | 0.0105 | 0.4956 | 0.8062 |
| 100 | 0.0818 | 0.0090 | 0.4354 | 0.8981 |
| 200 | 0.1561 | 0.0128 | 0.9325 | 0.8999 |
| 400 | 0.4143 | 0.0113 | 1.0054 | 0.9649 |
| 800 | 3.7524 | 0.0112 | 1.0406 | 0.9780 |
Figure 3 illustrates two important trends. First, the left panel shows that DVR execution time increases moderately with Hilbert space size, confirming that the method scales well computationally. Second, the right panel demonstrates that the compression ratio improves as n increases — the top 10 DVR coefficients account for nearly all of the variation, even for . This suggests that DVR becomes even more effective at summarizing dynamics in high-dimensional systems.
3.3. Reconstruction Error from Low-Order DVR Terms
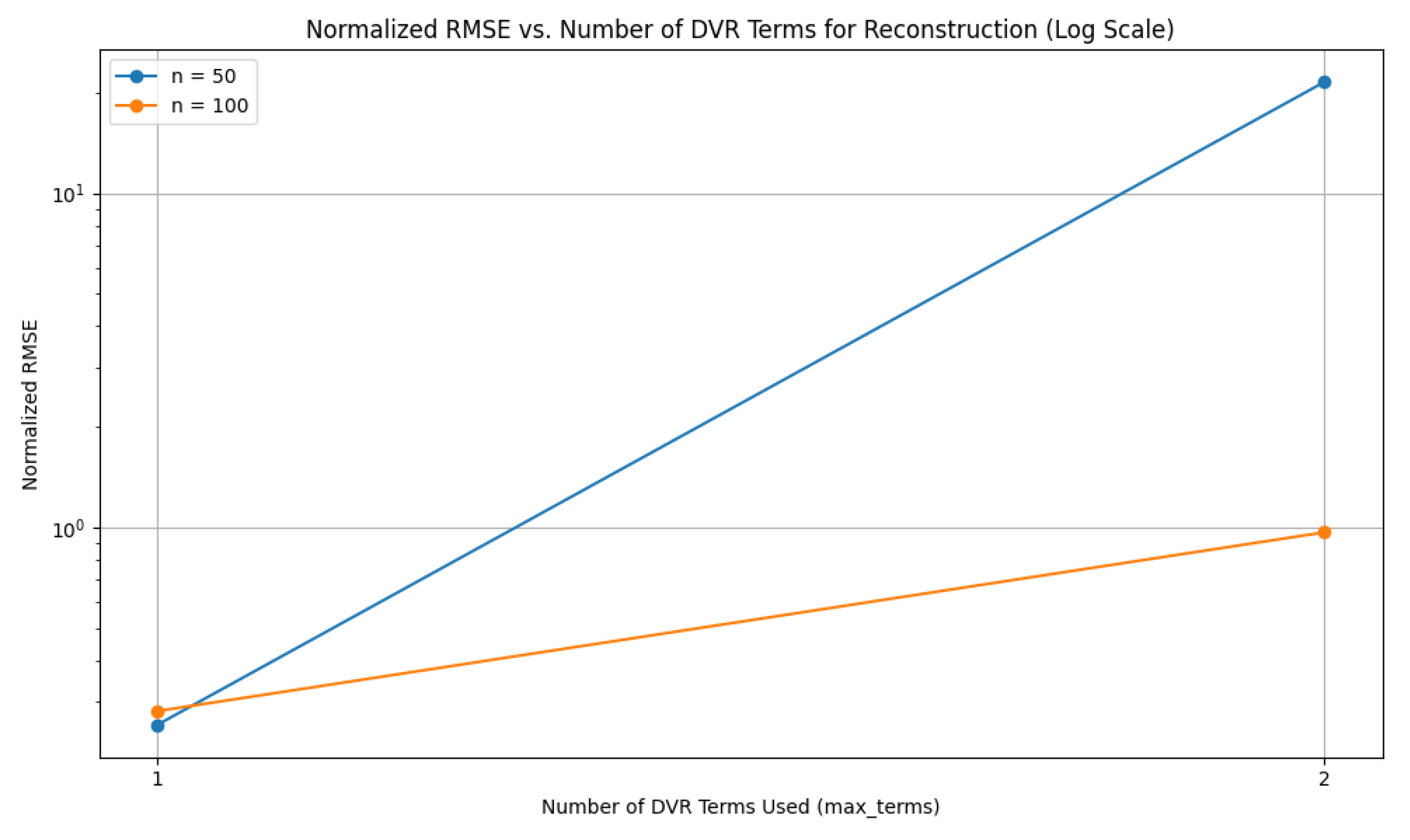
We evaluated how well DVR reconstructs observable trajectories using 1 or 2 terms (C0 and C1), for Hilbert space sizes and . Surprisingly, using only C0 yielded significantly lower normalized RMSE than using both terms. The second-order term (C1) often amplified boundary noise or numerical artifacts.
Table 3.
Reconstruction RMSE using DVR terms. Higher-order terms can worsen performance if not regularized.
Table 3.
Reconstruction RMSE using DVR terms. Higher-order terms can worsen performance if not regularized.
| n | Terms Used | RMSE | Normalized RMSE (%) |
| 50 | 1 | 2.86e-2 | 25.64 |
| 50 | 2 | 2.40e+0 | 2155.47 |
| 100 | 1 | 1.53e-2 | 28.19 |
| 100 | 2 | 5.26e-2 | 96.66 |
Using only the C0 term yields significantly lower error than using both C0 and C1, suggesting sensitivity to boundary artifacts or noise amplification from first differences.
As shown in Figure 4, including the second DVR term () unexpectedly increases the normalized RMSE. This behavior is particularly pronounced at lower n, where noise and boundary effects likely dominate the higher-order differences. This observation, while counter-intuitive for an ideal interpolating series, highlights critical practical aspects when applying DVR to numerically generated quantum observable trajectories:
Root Causes of Divergence: The divergence observed when including higher-order DVR terms is a consequence of numerical instability inherent in finite difference methods when applied to non-polynomial or noisy data. Higher-order differences intrinsically magnify subtle numerical noise or small fluctuations present in the signal produced by quantum simulation solvers. When these amplified noisy differences are then used for reconstruction via a polynomial-like expansion (such as Newton’s forward difference formula), they introduce spurious oscillations that rapidly deviate from the true underlying signal. This phenomenon is analogous to Runge’s phenomenon in polynomial interpolation, where fitting a high-degree polynomial to noisy data can lead to wild oscillations, particularly at the boundaries or regions of rapid change.
Implications for DVR’s Practicality and Scalability (Avoiding the Curse of Dimensionality): Crucially, this finding underscores a significant advantage for the practical application of DVR. While the formal DVR framework mathematically encompasses higher-order tensors and differences, our results empirically demonstrate that for typical quantum observable dynamics, the most robust and stable information for reconstruction is concentrated in the lowest orders ( and ). By relying primarily on these low-order terms, DVR inherently sidesteps the **curse of dimensionality** that often plagues methods relying on high-dimensional data representations or complex, high-order approximations. Since these high-order terms tend to be unstable or amplify noise, *not* requiring them for robust performance means DVR avoids the computational overhead and numerical fragility associated with their calculation and manipulation. This reinforces the framework’s scalability and inherent robustness for summarizing and controlling quantum dynamics.
Solutions and Mitigation Strategies: For scenarios where higher-order fidelity in reconstruction might be desired, mitigation strategies could be explored. These include applying regularization techniques (e.g., Tikhonov regularization or sparsity-promoting penalties) to the DVR coefficients during the reconstruction process to suppress noise amplification. Additionally, adaptive selection algorithms could dynamically determine the optimal number of DVR terms, halting the inclusion of terms when reconstruction error ceases to decrease or begins to increase. Signal pre-processing, such as low-pass filtering or smoothing, prior to DVR coefficient computation, could also reduce high-frequency noise that is particularly detrimental to higher-order differences. These avenues, however, extend beyond the scope of the present work’s core findings regarding low-order DVR robustness. As shown in Figure 4, including the second DVR term (C1) unexpectedly increases the normalized RMSE. This behavior is particularly pronounced at lower n, where noise and boundary effects likely dominate the higher-order differences. These results underscore the robustness of single-term DVR compression and the potential instability of using unregularized higher-order terms.
4. Conclusion
In this work, we introduced the Difference-based Variational Reconstruction (DVR) framework as a novel and unified approach to tackle the critical challenges of decoherence mitigation and data overhead in quantum systems. We demonstrated that DVR enables robust quantum control through adaptive Hamiltonian learning based on pathwise structure, achieving high fidelities and significant purity restoration even under strong decoherence. Simultaneously, DVR proved to be a highly scalable and effective compression scheme for observable evolution, robustly capturing essential dynamics with low-order terms and inherently mitigating the curse of dimensionality.
These results unequivocally support DVR as a powerful and unified method for both real-time quantum diagnostics and adaptive control, paving the way for more resource-efficient quantum experiments and robust device characterization. While our current findings highlight the remarkable robustness of low-order DVR terms, particularly and , future work will focus on integrating DVR directly into experimental feedback loops for real-time control, extending its application to multi-qubit systems, and exploring advanced regularization techniques to optimally leverage higher-order DVR coefficients for even richer dynamical insights.
Patent Disclosure
A provisional patent application related to this work has been filed with the United States Patent and Trademark Office (USPTO) under application number 63/807866, titled Dynamic Variational Reconstruction (DVR) Framework for Signal Detection and Nonlinear System Control.
Acknowledgments
This work builds upon two earlier preprints by the author that introduced the DVR framework in related quantum mechanical contexts:
- R. Acharyya, “A DVR-Based Framework for Detecting Wave–Particle Duality Transitions and the Quantum Cheshire Cat Effect,” Preprints.org, 2025. https://doi.org/10.20944/preprints202506.0127.v1
- R. Acharyya, “From BdG to DVR: A Pathwise Diagnostic Framework for Decoherence and Dislocation in Topological Quantum Systems,” Preprints.org, 2025. https://www.preprints.org/manuscript/202506.0464/v1
References
- Preskill, J. Quantum computing in the NISQ era and beyond. Quantum 2018, 2, 79.
- Acín, A.; et al. The quantum technologies roadmap: a European community view. New Journal of Physics 2018, 20, 080201.
- Dowling, J.P.; Milburn, G.J. Quantum technology: the second quantum revolution. Philosophical Transactions of the Royal Society of London. Series A: Mathematical, Physical and Engineering Sciences 2003, 361, 1655–1674.
- Gambetta, J.M.; et al. Building logical qubits in a superconducting quantum computing system. Nature Physics 2020, 16, 1052–1057.
- National Quantum Initiative Act, 2018. U.S. Congress Public Law No: 115-368.
- Georgescu, I.M.; Ashhab, S.; Nori, F. Quantum simulation. Reviews of Modern Physics 2014, 86, 153.
- Bharti, K.; et al. Noisy intermediate-scale quantum algorithms. Reviews of Modern Physics 2022, 94, 015004.
- Breuer, H.P.; Petruccione, F. The theory of open quantum systems; Oxford University Press, 2002.
- Schlosshauer, M. Decoherence and the quantum-to-classical transition; Springer, 2007.
- Brif, C.; Chakrabarti, R.; Rabitz, H. Control of quantum phenomena: past, present and future. New Journal of Physics 2010, 12, 075008.
- Wiseman, H.M.; Milburn, G.J. Quantum Measurement and Control; Cambridge University Press, 2010.
- Carrasquilla, J.; Melko, R.G. Machine learning phases of matter. Nature Physics 2017, 13, 431–434.
- Glasser, I.; et al. Neural-network quantum states, string-bond states, and chiral topological states. Physical Review X 2018, 8, 011006.
- Torlai, G.; et al. Neural-network quantum state tomography. Nature Physics 2018, 14, 447–450.
- Khaneja, N.; et al. Optimal control of coupled spin dynamics: design of NMR pulse sequences by gradient ascent algorithms. Journal of Magnetic Resonance 2005, 172, 296–305.
- Sklarz, S.E.; Tannor, D.J. Loading a Bose–Einstein condensate onto an optical lattice: An application of optimal control theory to the nonlinear Schrödinger equation. Physical Review A 2002, 66, 053619.
- Machnes, S.; et al. Comparing, optimizing, and benchmarking quantum-control algorithms in a unifying programming framework. Physical Review A 2011, 84, 022305.
- Schollwöck, U. The density-matrix renormalization group in the age of matrix product states. Annals of Physics 2011, 326, 96–192.
- Orús, R. A practical introduction to tensor networks: Matrix product states and projected entangled pair states. Annals of Physics 2014, 349, 117–158.
- Verstraete, F.; Murg, V.; Cirac, J.I. Matrix product states, projected entangled pair states, and variational renormalization group methods for quantum spin systems. Advances in Physics 2008, 57, 143–224.
- Peherstorfer, B.; Willcox, K.; Gunzburger, M.D. Survey of multifidelity methods in uncertainty propagation, inference, and optimization. SIAM Review 2018, 60, 550–591.
Figure 1.
Purity evolution with DVR-based adaptive control for different decoherence rates.
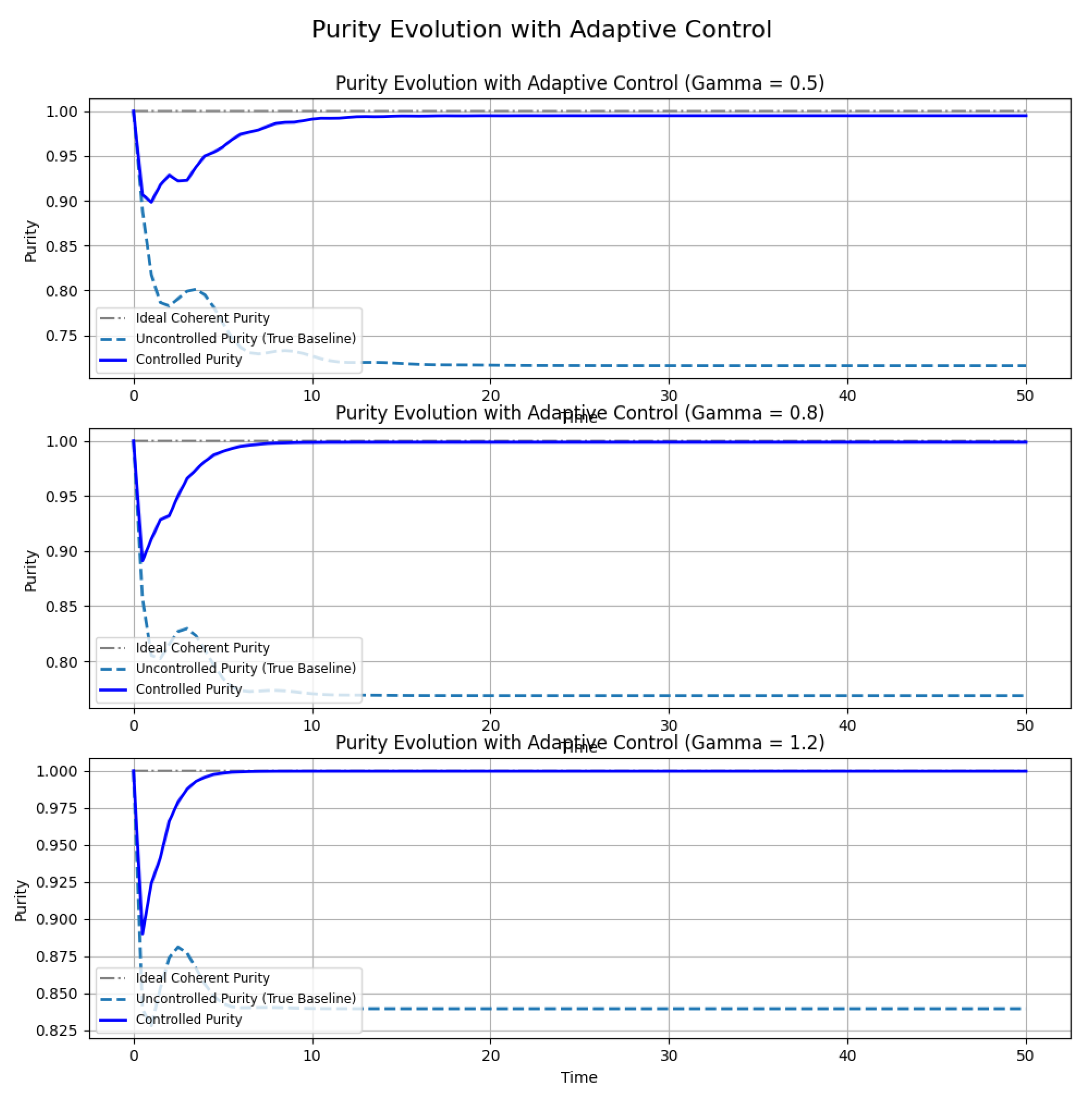
Figure 2.
Learned Hamiltonian parameters () during DVR-based control windows.
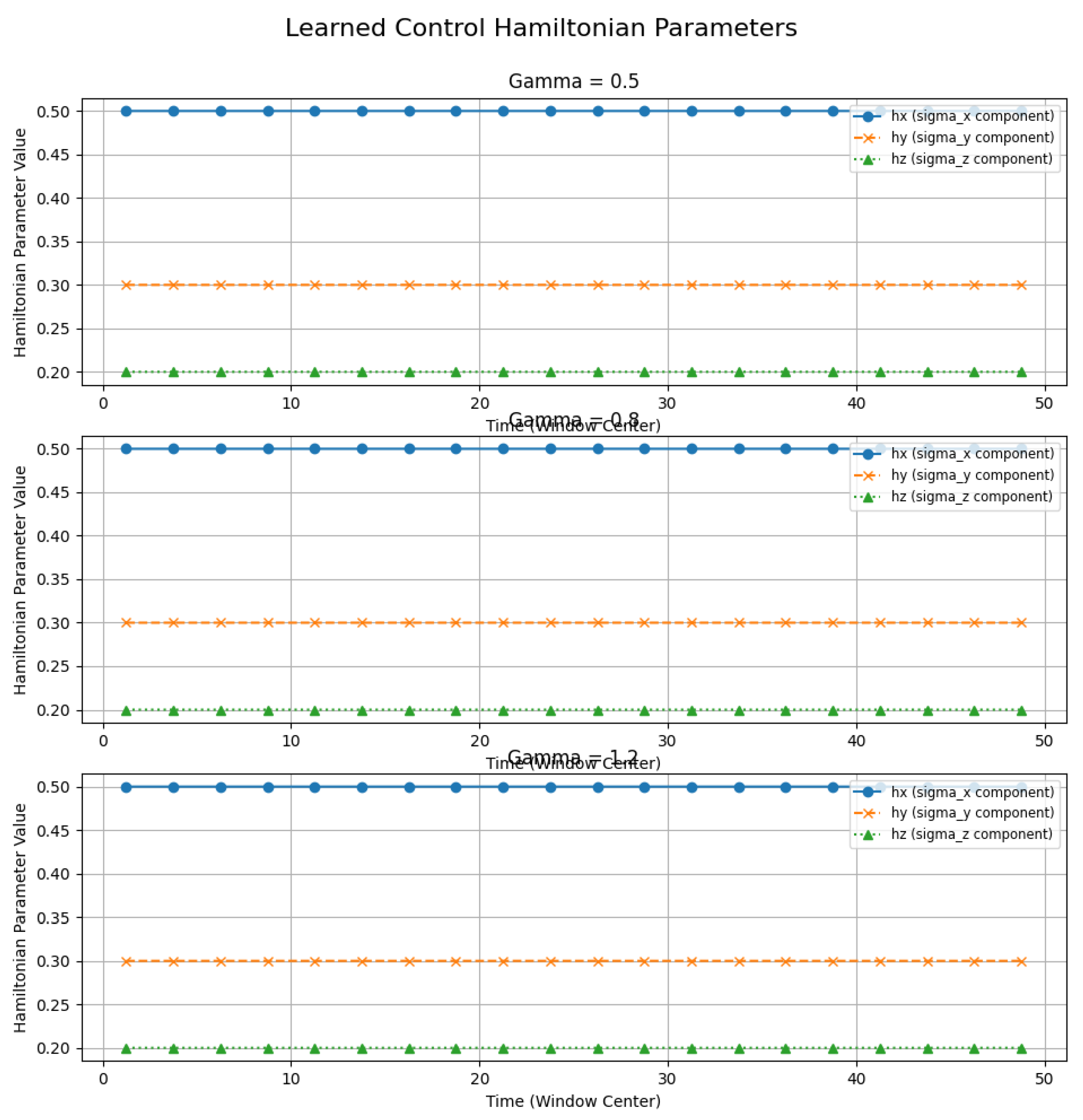
Figure 3.
Left: DVR execution time grows sublinearly with Hilbert space dimension n, demonstrating computational scalability. Right: Compression ratio (energy in top 10 C1 values) improves with n, indicating better low-rank approximation at higher dimensions.
Figure 3.
Left: DVR execution time grows sublinearly with Hilbert space dimension n, demonstrating computational scalability. Right: Compression ratio (energy in top 10 C1 values) improves with n, indicating better low-rank approximation at higher dimensions.
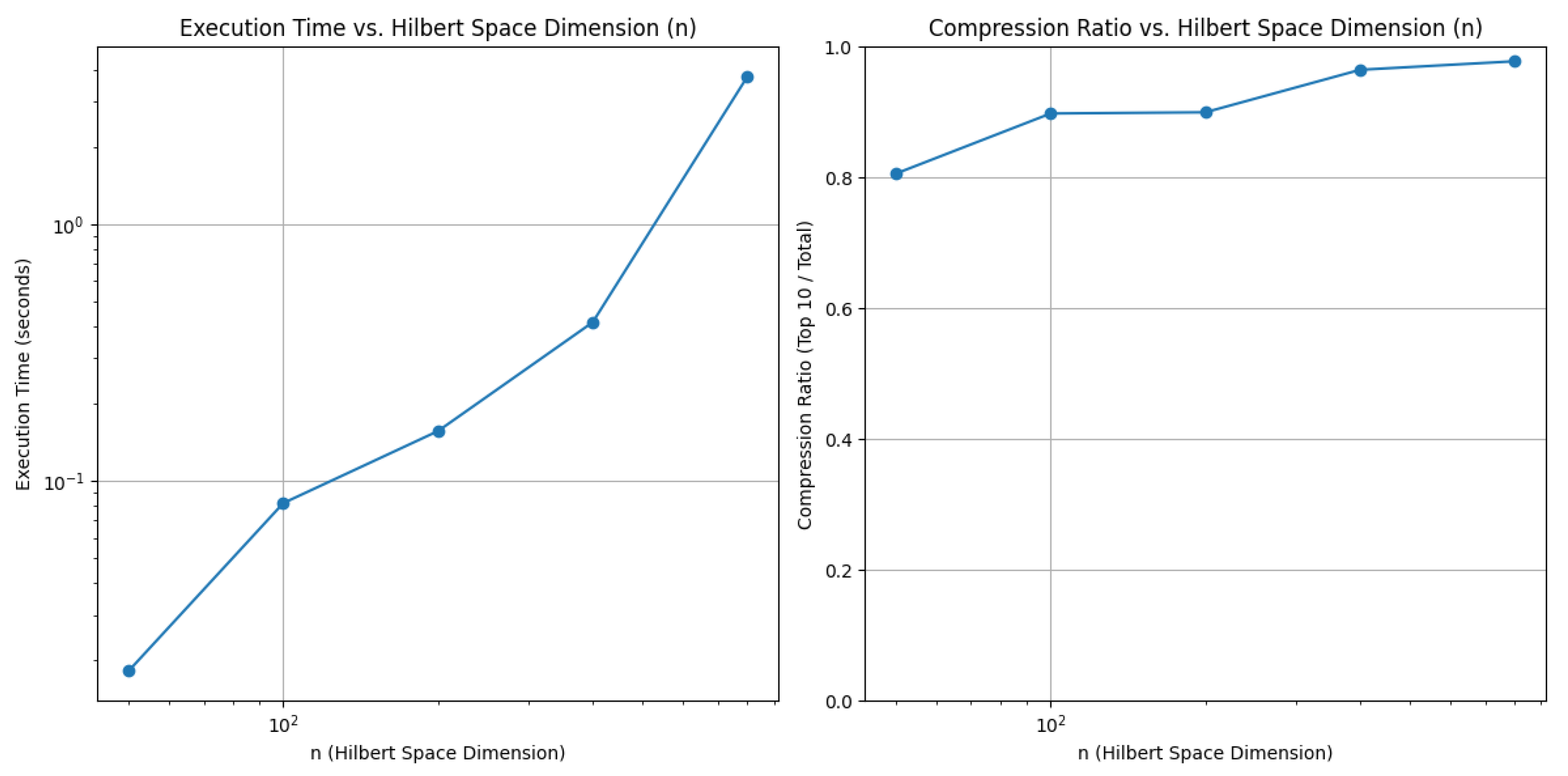
Figure 4.
Normalized RMSE vs. number of DVR terms used for reconstruction. Surprisingly, using just the C0 term yields lower error than using both C0 and C1, especially at .
Figure 4.
Normalized RMSE vs. number of DVR terms used for reconstruction. Surprisingly, using just the C0 term yields lower error than using both C0 and C1, especially at .
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



