
Submitted:
19 April 2025
Posted:
21 April 2025
You are already at the latest version
Abstract
This study examines the annual carbon emission differences between privately owned electric vehicles (EVs) and internal combustion engine vehicles (ICEVs) through the development of a usage-phase life cycle assessment (LCA) model, with a focus on the synergistic effects of grid carbon intensity, driving intensity (e.g., annual mileage), and vehicle efficiency. Through scenario analyses and empirical case studies in four Chinese megacities, three key findings emerge: (1) Grid carbon intensity dominates EV emission advantages—EVs retain significant carbon reduction benefits in low-CEG regions even with doubled annual mileage, while high-energy-consuming EVs risk emission reversals in coal-dependent grids under intensive usage. (2) Higher annual mileage among EV owners (1.5–2 times ICEV baselines) accelerates carbon accumulation, particularly eroding per-kilometer emission advantages in fossil-fuel-reliant regions. (3) Vehicle energy efficiency heterogeneity is critical: compact, low-energy EVs (e.g., A0-class sedans/SUVs) maintain advantages across all scenarios, whereas high-energy models (e.g., C-class sedans/SUVs) may exceed ICEV emissions in high-CEG regions. The study proposes a differentiated policy framework emphasizing synergistic optimization of grid decarbonization, vehicle-class-specific management, and user behavior guidance to maximize EVs’ carbon reduction potential. These insights provide scientific foundations for refining EV adoption strategies and achieving sustainable transportation transitions.
Keywords:
Electric Vehicles (EVs)
; Internal Combustion Engine Vehicles (ICEVs)
; Carbon Emissions
; Life Cycle Assessment (LCA)
; Grid Carbon Intensity
1. Introduction
Transportation is a major contributor to global carbon emissions, with private vehicles—particularly internal combustion engine vehicles (ICEVs)—accounting for a substantial proportion of sectoral emissions. As vehicular decarbonization emerges as a critical strategy for climate change mitigation [1,2], electric vehicles (EVs) have gained global prominence over the past two decades due to their potential for reducing operational emissions [3,4]. However, while EVs produce no direct tailpipe emissions, their environmental benefits are contingent on the carbon intensity of electricity generation. In regions where fossil fuel-based thermal power plants dominate the energy mix, EVs merely shift emissions from the vehicle operation phase to the energy production stage [5], sparking ongoing debates about their net carbon mitigation potential [6,7].
In general, vehicle life cycle emissions span production, usage, maintenance, and end-of-life phases, with the usage stage contributing 62%–70% of total emissions [8]. Consequently, comparative analyses of EV and ICEV carbon footprints have predominantly focused on operational phases [9,10,11]. However, such studies often assume uniform travel patterns and equivalent annual mileage between EV and ICEV users—an assumption challenged by recent empirical findings. For instance, Liu and Xu [12] revealed that EV owners in China exhibit 1.5 times higher annual mileage than ICEV owners. This disparity raises a critical question: Under comparable vehicle lifespans (e.g., 100,000 km or 150,000 km), could higher annual mileage among EV owners negate their carbon advantage, particularly in regions reliant on fossil fuel-based electricity?
To address this gap, this study conducts a granular comparative analysis of annual carbon emissions between EV and ICEV owners, incorporating two novel dimensions: (1) Differential usage behaviors: systematic integration of mileage disparities and travel mode preferences (e.g., EV owners’ propensity for private vehicle reliance); (2) Multifaceted emission determinants: regional power grid carbon intensity, charging infrastructure efficiency, vehicle-specific energy consumption metrics (kWh/100km for EVs; L/100km for ICEVs), temperature effects, and vehicle classification. By bridging these overlooked factors, this paper provides policymakers with actionable insights to optimize EV adoption strategies and maximize environmental benefits.
2. Literature Review
The conceptual foundation of life cycle assessment (LCA) traces back to the late 1960s when the Midwest Research Institute (MRI) conducted a groundbreaking energy analysis for The Coca-Cola Company, systematically evaluating beverage containers from raw material extraction to end-of-life disposal [13]. This seminal work laid the groundwork for modern LCA methodologies, which gained prominence in environmental management during the 1990s following the establishment of ISO 14040 standards that formalized LCA frameworks [14]. As a comprehensive analytical tool, LCA quantifies environmental impacts across a product’s entire life cycle, encompassing raw material acquisition, manufacturing, transportation, operational use, and ultimate disposal/recycling [15]. Its capacity to provide quantifiable environmental metrics has established LCA as an indispensable methodology for comparative environmental impact studies.
In the automotive emissions research, LCA applications have evolved to address both direct exhaust emissions during vehicle operation and cumulative impacts across full life cycles [6,10,11,16]. Recent comparative studies utilizing LCA frameworks reveal divergent conclusions regarding the carbon efficiency of EVs versus ICEVs. A substantial body of research demonstrates EVs’ environmental advantages: Qiao et al. [17] reported 18% lower life cycle greenhouse gas (GHG) emissions for EVs compared to ICEVs in 2015, projecting further reductions to 34.1 t CO2eq by 2020 through grid decarbonization. Similarly, Wu et al. [8] identified a 13.4% GHG reduction potential for Chinese EVs by 2020 through electricity mix optimization. Zhang et al. [18] concluded that most EVs exhibit emission reduction effects relative to ICEVs, estimating that in China, EVs achieved emission reductions of 6.56% to 44.4% in 2020, 13.97% to 53.39% in 2025, and 19.65% to 57.49% in 2030. These findings align with global observations that EV emissions strongly correlate with regional grid cleanliness [19,20,21,22].
Contrasting evidence, however, suggests contextual limitations to EV superiority. Hawkins et al. [23], Petrauskienė et al. [24] and Nuez et al. [25] cautioned that fossil-dependent energy systems could negate EV benefits, exemplified by Li et al. [26] finding of 24-31% higher emissions for Chinese EVs under 2018 grid conditions. Kurien and Srivastava [5] found that fossil fuels account for 81.7% of India’s power generation energy mix; and in this scenario, except for two-wheel EVs, the indirect carbon emissions of most EVs surpass those of ICEVs. Moreover, regional case studies further illustrate this paradox: in Poland’s coal-intensive grid, daily EV operation (26 km) generates 2.49–3.28 kgCO2/day, comparable to ICEV emissions [27]. Furthermore, Zhang et al. [18] found that the carbon emission reduction rate of EVs exhibits significant variation depending on driving mileage and vehicle type. In 2020, EVs with a driving mileage exceeding 700 kilometers demonstrated minimal to no emission reduction benefits, or in some cases, negative effects. Additionally, production-phase analyses also show higher GHG emissions for EVs due to battery manufacturing [28,29,30,31].
While existing research has extensively examined technical parameters (e.g., powertrain efficiency, grid emission factors) and vehicle characteristics (e.g., range, weight), critical behavioral dimensions remain understudied. Researchers generally assume that EVs and ICEVs have comparable service lifespans, typically estimated to be around 10 years or 150,000 km [19,32,33,34]. This indicates that EV owners exhibit similar daily vehicle usage patterns compared to ICEV owners. However, emerging evidence suggests significant differences in usage patterns between EV and ICEV owners [12,35,36]. The operational cost advantages of EVs [37], their environmentally-friendly nature [4], and policy support [38,39] may incentivize greater utilization intensity, as demonstrated by Chinese EV owners driving 50% more annual kilometers than ICEV counterparts [12]. This behavioral divergence results in the temporal compression of emissions during the life cycles of EVs, as intensive usage patterns condense total emissions into a shorter operational timeframe. This phenomenon is often overlooked in conventional LCA models, which typically assume uniform usage patterns.
However, this oversight carries substantial methodological implications. Given comparable vehicle lifespans (e.g., 150,000 km), intensified EV usage accelerates emission accumulation during the operational phase. For instance, an EV reaching its 150,000 km lifespan in 10 years versus an ICEV achieving the same over 15 years would exhibit distinct annual emission profiles, even with per-kilometer EV advantages. Such temporal dynamics challenge conventional annual emission comparisons and necessitate user-centric analytical frameworks. Therefore, this study addresses this critical gap by developing a usage-phase LCA model that explicitly incorporates behavioral differences between EV and ICEV owners. Building upon established parameters including grid carbon intensity, charging efficiency, energy consumption rates, and thermal effects, this study proposes a novel comparative framework from private vehicle owners’ perspectives. This approach enables more nuanced assessments of real-world emission tradeoffs between emerging and conventional vehicle technologies.
3. Methodology for Annual Carbon Emission Assessment
3.1. EV Annual Carbon Emission Model
Based on the life cycle assessment framework, this study concentrates on the operational phase of vehicles and develops a model to quantify the annual carbon emissions from privately owned EVs. As illustrated in Figure 1, the EV emission lifecycle comprises two phases: Well-to-Battery (WTB) and Battery-to-Wheels (BTW). Since the adoption of EVs shifts operational-phase emissions to the electricity generation stage, the carbon footprint of EVs is inherently tied to the grid’s carbon intensity. Importantly, grid carbon intensity encompasses total greenhouse gas emissions from power generation through end-user delivery, including inherent energy losses during transmission and distribution. For example, if an EV consumes 1 kWh of electricity, the actual amount generated at power plants is higher due to efficiency losses in the system. It should be noted that this model excludes upstream emissions from raw material extraction due to data and methodological limitations.
Then, based on the above LCA framework, the annual carbon emissions for EVs (ACEV, kgCO2/year) are calculated as:
where AMEV is annual mileage (km), ECEV is an energy consumption metric for EVs (kWh/100km). CEG represents the carbon intensity of the power grid (kgCO2/kWh). ηcharge represents the charging loss rate of EVs. Usually, there is a divergence between the electrical energy provided by the power grid and the actual energy inputted into the batteries of EVs [40,41]. This variance can be ascribed to a multitude of factors, such as power conversion losses, line resistance losses, and the inefficiencies of batteries. In addition, ηtrans represents the grid’s transmission loss rate, which does not have a fixed value and can vary based on factors such as voltage levels and the characteristics of transmission lines [42,43].
3.2. ICEV Annual Carbon Emission Model
For ICEVs, carbon emissions during the vehicle operational phase are evaluated using the following LCA framework (Figure 2), encompassing Well-to-Pump (WTP) and Pump-to-Wheels (PTW) phases. ICEV carbon emissions originate from direct tailpipe emissions and indirect refinery processes. Similarly, upstream emissions (e.g., crude oil extraction) are excluded due to data constraints.
Then, based on the above LCA framework, the annual carbon emissions for ICEVs (ACICEV, kgCO2/year) are expressed as:
where AMICEV is annual mileage (km), FCICEV is an energy consumption metric for ICEVs (L/100km). DCE represents direct carbon emission factor (2.225 kgCO2/L, derived from IPCC (2006) guidelines [44]). ICE represents an indirect refinery emission factor. According to the IPCC (2006) guidelines, ICE includes emissions from crude oil transportation, various refining processes such as distillation, catalytic cracking, and hydrotreating, as well as energy consumption including electricity and steam. For refineries, the indirect emissions per liter of gasoline produced typically range from 0.3 to 0.6 kgCO2/L, depending on the efficiency of the refining process and the composition of the energy mix. For the sake of convenience, this study adopts the midpoint value of 0.45 kgCO2/L as the basis for subsequent calculations.
3.3. Comparative Analysis of Annual Emissions
The disparity in annual carbon emissions (ΔAC) between EVs and ICEVs is defined as:
In the above equation, a positive ΔAC indicates higher annual carbon emissions for EVs, while a negative value suggests lower annual carbon emissions for EVs. However, the outcome hinges on variables such as: (1) usage patterns, i.e., AMEV and AMICEV; (2) energy consumption metrics, i.e., ECEV and FCICEV; (3) grid carbon intensity, i.e., CEG; (4) efficiency factors, i.e., ηcharge and ηtrans.
Notably, energy consumption metrics ECEV and FCICEV are influenced by driving habits, road conditions, vehicle speed, ambient temperature, and vehicle type [45,46,47,48]. To reflect real-world diversity, we assume: (1) ECEV: 10–30 kWh/100 km (covers A0-class sedans to C-class SUVs), and (2) FCICEV: 5–20 L/100 km (matches compact cars to large SUVs). This range aligns with empirical data from [19,49,50].
Additionally, grid carbon intensity (CEG) depends on energy mix and power generation technology [22,26,28]. Specifically, fossil-fuel grids: CEG ≈ 1 kgCO2/kWh [51,52], and clean-energy grids: CEG ≈ 0 kgCO2/kWh. For comparative analysis, we use CEG = 0–1 kgCO2/kWh (step = 0.1 kgCO2/kWh).
Finally, efficiency factors include ηcharge (charging losses): 5%–15% [41,53], and ηcharge (transmission losses): 5%–8% [52]. These ranges reflect real-world efficiency variations in charging infrastructure and power grids.
3.3.1. Scenario 1: Identical Usage Patterns Between EV and ICEV Owners
In this scenario, it is assumed that EV owners and ICEV owners have identical annual mileages (i.e., AMEV = AMICEV = AM). That is, the daily vehicle usage patterns of EV owners are consistent with those of ICEV owners. Under these conditions, the annual carbon emission disparity (ΔAC) between EVs and ICEVs can be expressed as:
It can be seen, when AMEV is equal to AMICEV, the sign of ΔAC is determined by the specific values of ECEV, FCICEV, and CEG. Thus, to investigate how disparities in these parameters effect on ΔAC, a simulation analysis was conducted. The results of the simulation analysis are presented in Figure 3.
Figure 3 shows EVs’ 100-kilometer emissions are lower than ICEVs’ under most conditions, even at high grid carbon intensity (CEG). For example, at CEG = 0.8 kgCO2/kWh—with EV energy consumption (ECEV) = 16.0 kWh/100 km and ICEV fuel consumption (FCICEV) = 7.5 L/100 km [50]—EVs emit 16.37 kgCO2/100 km vs. 20.06 kgCO2/100 km for ICEVs, even at maximum losses (ηcharge = 15%, ηtrans = 8%). This demonstrates EVs’ substantial emission reduction potential and supports their widespread adoption. However, emission reversals occur under extreme scenarios—high-energy-consuming EVs may outpollute low-fuel-consuming ICEVs at high CEG (shaded area in Figure 3). For instance, at CEG = 0.8 kgCO2/kWh, ECEV = 20.0 kWh/100 km, and FCICEV = 6.5 L/100 km, EVs emit 17.73 kgCO2/100 km vs. 17.39 kgCO2/100 km for ICEVs—even at minimum losses (ηcharge = 5%, ηtrans = 5%). While rare in practice, this highlights that EVs’ advantages may diminish under specific conditions.
Additionally, energy consumption metrics (ECEV, FCICEV) significantly impact the EV-ICEV emission gap. For example, increasing ECEV from 10 to 30 kWh/100 km and FCICEV from 5 to 20 L/100 km widens the gap across all CEG levels. To quantify the combined effects of ECEV, FCICEV, and CEG on ΔAC and assess vehicle class impacts, we analyzed data from Zhang et al. [18] (Table 1), assuming 10,000 km annual mileage for both vehicle types. Results are shown in Figure 4, which demonstrates that at maximum losses (ηcharge = 15%, ηcharge = 8%), EVs outperform ICEVs across all classes (Sedan/SUV) if CEG < 0.7 kgCO2/kWh. At minimum losses (ηcharge = 5%, ηtrans = 5%), EVs remain cleaner for all classes when CEG < 0.8 kgCO2/kWh, confirming EVs’ emission advantages in low-carbon grids. However, higher CEG triggers emission reversals in specific models: (1) B-class EV sedans exceed ICEVs at CEG = 0.9 kgCO2/kWh, and (2) C-class EVs (sedans/SUVs) exceed ICEVs at CEG = 1.0 kgCO2/kWh. Additionally, A0-class EV SUVs retain advantages at high CEG, likely due to low ECEV and CEG-insensitivity.
Therefore, when promoting EVs, targeted strategies should be formulated based on vehicle characteristics and regional grid carbon intensity. In particular, small, low-energy-consuming EVs may offer greater promotion value in high-carbon grid areas. Policymakers should consider regional grid carbon intensity and vehicle model differences when formulating EV promotion policies. In low CEG areas, various types of EVs can be vigorously promoted; however, in high CEG areas, priority should be given to promoting small, low-energy-consuming EVs, while increasing investment in grid cleaning and transformation to enhance the carbon reduction benefits of EVs. For consumers, choosing low-energy-consuming EV models is recommended in regions with high grid carbon intensity to minimize personal travel-related carbon emissions.
3.3.2. Scenario 2: Divergent Usage Patterns Among EV and ICEV Owners
The preceding analysis assumes that EV owners and ICEV owners exhibit identical vehicle usage patterns. However, as discussed in Section 2, the operational cost advantages of EVs may lead to higher utilization rates [12,37]. Therefore, in this scenario, it is assumed that EV owners and ICEV owners have different annual mileage, with the annual mileage for EV owners being x times that of ICEV owners (i.e., AMEV = x⋅AMICEV, where x≥1). Consequently, the annual carbon emission difference (ΔAC) between EVs and ICEVs can be formulated as:
It can be seen that when AMEV is not equal to AMICEV, the sign of ΔAC is determined by the specific values of x, ECEV, FCICEV, and CEG. Thus, to investigate how disparities in these parameters effect on ΔAC, a simulation analysis was conducted. In this analysis, x was set to 1.25, 1.5, 1.75 and 2, respectively. The values of the other parameters were kept consistent with those in Scenario 1. Figure 5 illustrates the trend of ΔAC as it varies with CEG under different values of x.
Figure 5 shows that at low grid carbon intensity (CEG), EVs emit less than ICEVs, yielding a negative carbon emission difference (ΔAC). As CEG rises, ΔAC increases and crosses zero for some vehicle types, indicating EV emissions exceed ICEVs. Additionally, mileage multiplier (x)—where x=1 represents equal annual mileage to ICEVs—also impacts ΔAC: higher x shifts curves upward, favoring ICEVs. For example, at x=1.25 (1.25×ICEV baseline), EVs retain advantages in low CEG regions, but at x=2 (double ICEV mileage), this advantage erodes even in low CEG and disappears in high CEG. Moreover, Figure 5 further demonstrates EV energy consumption (ECEV) and ICEV fuel consumption (FCICEV) modulate ΔAC. For example, low-energy EVs (ECEV = 10 kWh/100km) paired with efficient ICEVs (FCICEV = 5 L/100km) diverge sharply from high-energy combinations (ECEV = 30 kWh/100km, FCICEV = 20 L/100km), highlighting energy efficiency’s critical role. Data for this analysis draw from Zhang et al. [18] (Table 1), with charging and transmission losses fixed at 5% to isolate CEG and mileage effects.
Figure 6 reveals that below CEG = 0.4 kgCO2/kWh, all A0-, A-, B-, and C-class EV sedans and SUVs outperform ICEVs—even at x=2 (double ICEV mileage). Their emission curves lie consistently below ICEV baselines. However, in high CEG regions (0.6–1.0 kgCO2/kWh), ΔAC widens with higher x. For A-class SUVs, x=1.25 retains EV advantages in low CEG, but x=2 causes steep emission increases and premature ICEV curve crossings—especially for high-energy EVs. These findings highlight grid CEG and mileage patterns as key determinants of EV-ICEV emission differences. Policymakers should: (1) cautiously promote high-energy EVs in high-CEG regions while incentivizing low-energy models; (2) encourage mileage optimization among EV owners to maximize emission reductions, particularly in carbon-intensive grids.
4. Case Study
Building on Section 3’s framework—which quantifies interactions between grid carbon intensity (CEG), vehicle efficiency, and usage pattern differences—we apply this model to real-world contexts via spatial stratification. China, the world’s largest EV market (15.52 million EVs by 2023) and a nation with significant interregional energy disparities, provides an ideal case study. Provincial CEG varies widely—from 0.095 kgCO2/kWh in hydropower-dominant regions to 1.092 kgCO2/kWh in coal-reliant areas—offering natural experiments to investigate two questions: (1) how do spatial CEG variations affect EV-ICEV carbon emission parity thresholds under different usage intensities? and (2) do observed behaviors (e.g., EV owners driving more mileage) erode emission advantages in specific energy regimes?
To analyze how regional energy profiles influence EVs’ emission reduction efficacy, we employ a spatially differentiated framework. Four megacities—Beijing (North China), Shanghai (East China), Guangzhou (South China), and Chengdu (Southwest China)—were selected (Figure 7) to represent diverse grid types. By 2023, each city had over 500,000 EVs, with Shanghai leading at 1.288 million. Grid CEG varied significantly in 2023: Chengdu (0.1000 kgCO2/kWh, lowest) vs. Guangzhou (0.6379 kgCO2/kWh, highest). This disparity underscores substantial regional differences in EVs’ indirect emissions compared to ICEVs.
Additionally, 100-kilometer energy consumption gap between EVs and ICEVs is a critical determinant of their emission disparities. To capture real-world patterns, we used web scraping to collect verified owner-reported data from major platforms (e.g., Dongchedi, www.dongchedi.com; Autohome, www.autohome.com.cn), yielding 19,057 valid records across four vehicle classes (A0, A, B, C) and two body types (sedans, SUVs): ICEVs (12,268 records), 6,192 sedans and 6,076 SUVs; EVs (6,789 records), 3,189 sedans and 3,600 SUVs. To account for regional variations in traffic, infrastructure, and driving behaviors, we analyzed energy consumption alongside city-specific grid emission factors. Figure 8 shows separate boxplots for EV and ICEV energy consumption in Beijing, with median (red lines), mean (black dots), and outliers (+). After removing outliers, we calculated descriptive statistics (median, quartiles, max, min, mean) to characterize energy consumption patterns. By integrating these with grid CEG and annual mileage, we quantify annual carbon emission disparities between EV and ICEV owners.
Moreover, in the case study, for the efficiency factors ηcharge (charging losses) and ηtrans (transmission losses), based on statistical data provided by the National Energy Administration, we set ηtrans to 6.5%, and ηcharge to 10% [54]. In addition, assuming that the average annual mileage of ICEV owners is 10,000 km, a value grounded in a synthesis of statistical datasets and real-world vehicle usage scenarios [19,33]. Based on these settings, this study uses a combined visualization approach overlaying violin plots and boxplots to display the distribution and heterogeneity of carbon emissions from EVs and ICEVs across four regional grid carbon intensities (Beijing, Shanghai, Guangzhou, Chengdu), four vehicle categories (A0 to C-class sedans/SUVs), and mileage multipliers relative to the ICEV baseline (x = 1, 1.5, 2). The corresponding results are presented in Figure 9.
As shown in Figure 9, grid carbon intensity is pivotal in shaping EV emission distributions. In high-carbon regions (e.g., Guangzhou), high-energy-consuming EVs at the maximum percentile emit more than medium/low-energy ICEVs (≤75th percentile) but less than high-energy ICEVs (maximum percentile). In contrast, low-carbon regions (e.g., Chengdu) use grid decarbonization to offset extreme EV usage (maximum percentile), ensuring all percentile ranges retain EVs’ absolute emission advantage. Second, regional heterogeneity emerges in the impact of annual mileage multipliers (x). In high-carbon regions (e.g., Guangzhou), higher x drives nonlinear dispersion growth in EV emissions—e.g., C-class SUVs see a 62.5% IQR increase—especially among extreme high-energy users (maximum percentile). Low-carbon regions (e.g., Chengdu) show modest dispersion growth (IQR increase < 35%), as grid decarbonization mitigates high-mileage emission penalties.
Lastly, energy consumption quantiles reveal technological optimization priorities. High-energy models (e.g., C-class SUVs) exhibit right-skewed EV emission distributions (long tails). In Guangzhou, x = 2 drives maximum EV emissions (5.32 tCO2/year) above ICEVs’ 75th percentile (4.80 tCO2/year), meaning 25% of high-energy EV owners exceed medium/low-energy ICEVs (Q1–Q3). Intelligent energy management is thus critical to mitigate extreme-scenario risks. Additionally, low-energy models (e.g., A0-class) show IQR values 35%–45% of same-level ICEVs with no significant skewness. For example, Beijing’s A0-class EVs (x = 1.5) have a 25th–75th percentile range of 1.2–1.7 tCO2/year, confirming robust emission advantages across driving behaviors.
The above analysis reveals heterogeneity in carbon emission distributions between EVs and ICEVs across cities, vehicle classes, and mileage multiplier (x) scenarios. However, real-world distributions are shaped by intertwined user behaviors and regional grid characteristics, necessitating standardized models to identify universal patterns among core variables. Therefore, using average energy consumption data by vehicle class, the study constructs a lollipop chart (Figure 10) to quantify direct effects of grid carbon intensity (CEG) and mileage multiplier (x) on carbon emission differences (ΔAC) between identical EV and ICEV classes. This method minimizes outlier impacts and isolates CEG-x interactions, establishing robust theoretical bounds for policy design.
Figure 10 shows that in high-carbon regions (e.g., Guangzhou, CEG = 0.6379 kgCO2/kWh), higher x values (e.g., x = 2, double the baseline mileage) drive ΔAC toward zero or positivity—notably for A0-, A-, and B-class models—indicating EV emissions may exceed comparable ICEVs. Conversely, in low-carbon regions (e.g., Chengdu, CEG = 0.1000 kgCO2/kWh), all same-class ΔAC values remain negative, confirming EVs emit significantly less than ICEVs—even at doubled mileage. Thus, the CEG-x interaction is pivotal in determining the degree of EVs’ emission advantage.
While Figure 10 explores same-class policy-sensitive ranges for grid carbon intensity (CEG) and mileage multiplier (x), real-world consumer choices often involve cross-class comparisons (e.g., B-class EVs vs. A-class ICEVs). To address this, we extend the analysis framework by benchmarking against A-class ICEVs’ median fuel consumption—which accounts for ~50% of China’s passenger car sales—and evaluating EV emission quantiles (minimum, 25th, median, 75th, maximum) from real-world data. This quantifies extreme user behavior impacts on emission reduction potential (Figure 11). Notably, Chengdu is excluded from cross-class analysis because its ultra-low grid CEG (0.1 kgCO2/kWh) ensures all EV quantiles—including the maximum—lie below ICEVs’ 25th percentile (Figure 9), leaving no policy optimization space. Thus, we focus on medium/high-carbon grids (Beijing, Shanghai, Guangzhou) to analyze CEG-energy consumption interactions.
Figure 11 shows EVs’ emission advantage depends on vehicle energy consumption and grid CEG. A0-class EVs—powered by low energy consumption—remain below A-class ICEVs’ median emissions even under high-carbon grids (e.g., Guangzhou) and doubled mileage (x = 2, 20,000 km). In addition, B- and C-class EVs, however, are highly sensitive to both factors: C-class SUVs at Guangzhou’s max percentile with x = 2 emit 1.3 times A-class ICEVs’ median, exceeding the benchmark. Finally, low-energy EVs (minimum–25th percentile) outperform ICEVs universally, but high-energy EVs (75th–max percentile) approach or surpass ICEV benchmarks in medium/high-carbon grids.
Now, building on the above analysis, this study focuses on four critical dimensions: power grid decarbonization, class-based vehicle control, user behavior guidance, and cross-regional collaboration. A targeted policy framework is proposed to systematically optimize the carbon emission reduction potential of electric vehicles.
First, regional grid decarbonization is critical to unlocking EVs’ emission reduction potential. As shown in Figure 9, Chengdu (characterized by a low-carbon grid with a carbon emission intensity (CEG) of 0.1 kgCO2/kWh) demonstrates an absolute advantage for EVs: even when annual mileage doubles (x = 2, relative to a 10,000 km baseline), EVs’ lifetime emissions remain significantly lower than those of ICEVs. In contrast, Guangzhou (a high-carbon grid with CEG = 0.6379 kgCO2/kWh) shows that high-energy-consuming EVs may exceed ICEV emissions. Thus, coal-dependent regions must prioritize grid decarbonization—via wind, solar, and energy storage integration—to reduce CEG and realize EVs’ potential. Policies should include implementing a renewable energy quota system, expanding carbon market coverage, and accelerating flexible thermal power plant upgrades.
Second, differentiated vehicle promotion strategies are necessary. As shown in Figure 11, A0-class EVs (e.g., 11.6 kWh/100km energy consumption) outperform A-class ICEVs even in high-carbon grids. By contrast, B- and C-class EVs in high-energy-consumption scenarios—even at doubled annual mileage (x = 2)—may emit more carbon than A-class ICEVs. Therefore, high-carbon regions (e.g., Guangzhou) should prioritize subsidies for A0/A-class EVs and restrict high-energy models (e.g., C-class SUVs). In low-carbon regions (e.g., Chengdu), all EV classes can be promoted universally. Additionally, strengthening energy efficiency labeling will guide consumers toward low-energy models.
Third, dynamic monitoring of owner behavior can refine mileage incentive mechanisms. Figure 10 shows that in high-carbon grids, doubling annual mileage (x = 2) narrows and even reverses the carbon emission gap (ΔAC) between EVs and ICEVs—e.g., A0, A, and B-class vehicles in Guangzhou switch to net higher emissions. To address this, policymakers should launch a driving data platform and design dynamic carbon credit policies for high-mileage users. Specifically: (1) high-mileage owners (>20,000 km/year) choosing high-energy models should face carbon taxes; (2) those selecting low-energy models should receive charging subsidies to incentivize efficiency.
Fourth, cross-regional collaboration and differentiated policies are essential. Figure 9 reveals city-specific variations in vehicle-related emissions: Guangzhou realizes EV benefits only via specific models, while Chengdu—with inherently low grid carbon intensity—requires no additional policies. A national policy framework should therefore adopt regionally tailored measures based on grid carbon intensity (low/medium/high): (1) high-carbon regions should mandate manufacturers to sell ≥60% low-energy models (e.g., A0 and A-class); (2) low-carbon regions can relax restrictions on higher-energy models; (3) cross-regional green electricity trading should be expanded to allow high-carbon regions to purchase western hydropower/wind quotas and reduce CEG.
Overall, the carbon emission reduction benefits of EVs are significantly contingent upon the collaborative optimization of the power grid’s cleanliness, the energy efficiency of vehicle models, and user behavior patterns. Policy-making must steer clear of a “one-size-fits-all” approach. By fostering the low-carbon transition of the power grid, enforcing classification-based management of vehicle models, guiding adjustments in user behaviors, and enhancing regional collaboration and cooperation, the full potential of EVs’ carbon emission reduction benefits can be realized.
5. Discussion
5.1. Summary
This study investigates the annual carbon emission disparities between EVs and ICEVs, with a focus on the interplay between owners’ vehicle usage patterns (e.g., annual mileage) and regional grid carbon intensity. By developing a usage-phase life cycle assessment (LCA) model, this study systematically quantifies the impacts of key variables—energy consumption metrics (ECEV and FCICEV), grid carbon intensity (CEG), and mileage patterns—on the carbon parity thresholds between EVs and ICEVs. Through scenario analyses and case studies across four Chinese megacities (Beijing, Shanghai, Guangzhou, Chengdu), three critical findings emerge:
(1) Grid carbon intensity dominance: EVs exhibit significant carbon reduction advantages in low-CEG regions, even with doubled annual mileage. Conversely, in high-CEG regions, high-energy-consuming EVs may surpass ICEV emissions under extreme usage scenarios.
(2) Behavioral impact: EV owners’ higher annual mileage (1.5–2×ICEV baselines) accelerates emission accumulation, particularly in coal-dependent grids, potentially negating per-kilometer carbon advantages.
(3) Vehicle class heterogeneity: Small, low-energy EVs (e.g., A0-class sedans) consistently outperform ICEVs across all CEG ranges, while high-energy models (e.g., C-class SUVs) risk carbon parity reversal in high-CEG regions.
5.2. The Policy Implications of the Findings
The findings in this study highlight the need for spatially and technologically differentiated policies to maximize EV carbon reduction benefits:
(1) Grid decarbonization prioritization. Specifically, in high-CEG regions (e.g., coal-dependent areas), accelerate the integration of renewable energy sources such as wind, solar, and storage technologies, while systematically phasing out coal-fired power plants. Implement carbon pricing mechanisms to incentivize the transition to cleaner energy systems. Conversely, in low-CEG regions, prioritize the widespread adoption of EVs across all vehicle categories while maintaining the momentum of ongoing grid decarbonization efforts.
(2) Vehicle class-specific promotion. Specifically, in high-CEG regions, establish mandatory quotas for low-energy vehicle models (e.g., at least 60% A0/A-class EVs) while imposing stricter restrictions on high-energy-consuming models (e.g., C-class SUVs). Furthermore, enhance energy efficiency labeling systems and provide targeted subsidies for low-consumption electric vehicles to effectively guide consumer preferences.
(3) Dynamic behavioral incentives. Establish real-time driving data platforms to monitor high-mileage users. Introduce carbon taxes for high-energy EV owners (>20,000 km/year) and charging subsidies for low-energy adopters.
(4) Cross-regional collaboration. Enable green electricity trading between high- and low-carbon regions to reduce CEG disparities. Develop national EV policies with regional adaptability, such as tiered subsidies based on local grid profiles.
5.3. Conclusions and Further Research
This study demonstrates that EVs’ carbon reduction potential is contextually contingent, requiring synergistic optimization of grid cleanliness, vehicle efficiency, and user behavior. While EVs generally outperform ICEVs in low-carbon grids, their advantages diminish or reverse in fossil-heavy regions, especially for high-energy models under intensive usage. Policymakers must adopt a no “one-size-fits-all” approach, balancing technological promotion with grid transformation and behavioral guidance.
Future research on carbon emission reduction in EVs can be further deepened in the following directions to refine the theoretical framework and strengthen policy guidance. First, full Lifecycle Integration: Expand LCA boundaries to include upstream emissions (battery production, raw material extraction) and end-of-life recycling, particularly for next-generation battery technologies (e.g., solid-state, sodium-ion). Second, behavioral economics analysis: Investigate drivers of EV owners’ high-mileage behavior (e.g., cost sensitivity, policy incentives) through mixed-method studies (surveys, experiments) to refine incentive designs. Third, global comparative analysis: Compare EV-carbon parity thresholds across diverse energy regimes (e.g., Norway’s renewables vs. India’s coal reliance) to derive universally adaptable policy frameworks. By addressing these dimensions, future work can enhance the precision of EV carbon assessments and support global efforts toward sustainable transportation transitions.
Author Contributions
Conceptualization, Kai Liu and Fangfang Liu; methodology, Kai Liu, Fangfang Liu and Chao Guo; validation, Kai Liu, Fangfang Liu and Chao Guo; formal analysis, Kai Liu and Fangfang Liu; data curation, Fangfang Liu and Chao Guo; writing—original draft preparation, Kai Liu and Fangfang Liu; writing—review and editing, Kai Liu, Fangfang Liu and Chao Guo.; visualization, Fangfang Liu.; supervision, Kai Liu; project administration, Kai Liu; funding acquisition, Kai Liu. All authors have read and agreed to the published version of the manuscript.
Funding
Please add: This research was funded by “Ministry of Education Humanities and Social Sciences Youth Research Fund, grant number 24YJCZH172”, “Jiangsu Provincial Social Science Fund Project, grant number 24SHB002” and “The APC was funded by Fangfang Liu”.
Data Availability Statement
Data will be made available on reasonable request.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Liu, R.; Ding. Z.; Wang, Y.W. The relationship between symbolic meanings and adoption intention of electric vehicles in China: The moderating effects of consumer self-identity and face consciousness. J. Clean. Prod. 2021, 288, 125116. [CrossRef]
- Adu-Gyamfi, G.; Song, H.; et al. Towards sustainable vehicular transport: Empirical assessment of battery swap technology adoption in China. Technol. Forecast. Soc. Change 2022, 184, 121995. [CrossRef]
- Jansson, J.; Nordlund, A.; Westin, K. Examining drivers of sustainable consumption: The influence of norms and opinion leadership on electric vehicle adoption in Sweden. J. Clean. Prod. 2017, 154, 176–187. [CrossRef]
- Wongsunopparat, S.; Cherian, P. Study of factors influencing consumers to adopt EVs (Electric Vehicles). Bus. Econ. Res. 2023, 13(2), 155. [CrossRef]
- Kurien, C.; Srivastava, A.K. Impact of electric vehicles on indirect carbon emissions and the role of engine posttreatment emission control strategies. Integr. Environ. Assess. Manag. 2020, 16(2), 234–244. [CrossRef]
- Shen, W.; Han, W.; Wallington, T.J.; Winkler, S.L. China electricity generation greenhouse gas emission intensity in 2030: Implications for electric vehicles. Environ. Sci. Technol. 2019, 6063–6072. [CrossRef]
- Hsieh, I.Y.L.; Chossière, G.P.; et al. An integrated assessment of emissions, air quality, and public health impacts of China’s transition to electric vehicles. Environ. Sci. Technol. 2022, 56(11), 6836–6846.
- Wu, Z.; Wang, M.; et al. Life cycle greenhouse gas emission reduction potential of battery electric vehicle. J. Clean. Prod. 2018, 190, 462–470. [CrossRef]
- de Souza, L.L.P.; Lora, E.E.S.; et al. Comparative environmental life cycle assessment of conventional vehicles with different fuel options, plug-in hybrid and electric vehicles for a sustainable transportation system in Brazil. J. Clean. Prod. 2018, 444–468. [CrossRef]
- Joshi, A.; Sharma, R.; Baral, B. Comparative life cycle assessment of conventional combustion engine vehicle, battery electric vehicle and fuel cell electric vehicle in Nepal. J. Clean. Prod. 2022, 379, 134407. [CrossRef]
- Xu, M.; Weng, Z.; Xie, Y.; Chen, B. Environment and health co-benefits of vehicle emission control policy in Hubei, China. Transp. Res. D 2023, 103773. [CrossRef]
- Liu, K.; Xu, Y. Exploring disparities and similarities in daily travel mode choices between electric vehicle owners and internal combustion engine vehicle owners. Transp. Lett. 2024, 1–16. [CrossRef]
- Hunt, R.G.; Sellers, J.D.; Franklin, W.E. Resource and environmental profile analysis of nine beverage container alternatives. Midwest Research Institute 1974.
- International Organization for Standardization. Environmental management—Life cycle assessment—Principles and framework (ISO Standard No. 14040). 2006. Retrieved from https://www.iso.org.
- Guinée, J.B.; Heijungs, R.; Huppes, G.; Zamagni, A.; Masoni, P.; Buonamici, R.; Ekvall, T.; Rydberg, T. Life cycle assessment: Past, present, and future. Environ. Sci. Technol. 2011, 45(1), 90–96. [CrossRef]
- Farzaneh, F.; Jung, S. Lifecycle carbon footprint comparison between internal combustion engine versus electric transit vehicle: A case study in the U.S. J. Clean. Prod. 2023, 136111. [CrossRef]
- Qiao, Q.; Zhao, F.; Liu, Z.; He, X.; Hao, H. Life cycle greenhouse gas emissions of Electric Vehicles in China: Combining the vehicle cycle and fuel cycle. Energy 2019, 177, 222–233. [CrossRef]
- Zhang, H.; Zhao, F.; Hao, H.; Liu, Z. Comparative analysis of life cycle greenhouse gas emission of passenger cars: A case study in China. Energy 2023, 126282. [CrossRef]
- Ellingsen, L.A.W.; Singh, B.; Strømman, A.H. The size and range effect: lifecycle greenhouse gas emissions of electric vehicles. Environ. Res. Lett. 2016, 11(5), 054010. [CrossRef]
- Aljohani, T.; Alzahrani, G. Life Cycle Assessment to Study the Impact of the Regional Grid Mix and Temperature Differences on the GHG Emissions of Battery Electric and Conventional Vehicles. SoutheastCon 2019, 1–9. [CrossRef]
- Rahman, M.M.; Zhou, Y.; Rogers, J.; Chen, V.; Sattler, M.; Hyun, K. A comparative assessment of CO2 emission between gasoline, electric, and hybrid vehicles: A Well-To-Wheel perspective using agent-based modeling. J. Clean. Prod. 2021, 128931. [CrossRef]
- Singh, M.; Yuksel, T.; Michalek, J.J.; Azevedo, I.M.L. Ensuring greenhouse gas reductions from electric vehicles compared to hybrid gasoline vehicles requires a cleaner U.S. electricity grid. Sci. Rep. 2024, 14, 1639. [CrossRef]
- Hawkins, T.R.; Singh, B.; Majeau-Bettez, G.; Strømman, A.H. Comparative environmental life cycle assessment of conventional and electric vehicles. J. Ind. Ecol. 2013, 53–64.
- Petrauskienė, K.; Skvarnavičiūtė, M.; Dvarionienė, J. Comparative environmental life cycle assessment of electric and conventional vehicles in Lithuania. J. Clean. Prod. 2020, 119042. [CrossRef]
- Nuez, I.; Ruiz-García, A.; Osorio, J. A comparative evaluation of CO2 emissions between internal combustion and electric vehicles in small isolated electrical power systems - Case study of the Canary Islands. J. Clean. Prod. 2022, 133252. [CrossRef]
- Li, Y.; Ha, N.; Li, T. Research on Carbon Emissions of Electric Vehicles throughout the Life Cycle Assessment Taking into Vehicle Weight and Grid Mix Composition. Energies 2019, 12(19), 3612. [CrossRef]
- Sobol, Ł.; Dyjakon, A. The influence of power sources for charging the batteries of electric cars on co2 emissions during daily driving: A case study from Poland. Energies 2020, 13(16), 4267. [CrossRef]
- Qiao, Q.; Zhao, F.; Liu, Z.; Jiang, S.; Hao, H. Cradle-to-gate greenhouse gas emissions of battery electric and internal combustion engine vehicles in China. Appl. Energy 2017, 1399–1411. [CrossRef]
- Hao, H.; Qiao, Q.; Liu, Z.; Zhao, F. Impact of recycling on energy consumption and greenhouse gas emissions from electric vehicle production: The China 2025 case. Resour. Conserv. Recycl. 2017, 114–125. [CrossRef]
- Wang, N.; Tang, G. A review on environmental efficiency evaluation of new energy vehicles using life cycle analysis. Sustainability 2022, 14(6), 3371. [CrossRef]
- Buberger, J.; Kersten, A.; Kuder, M.; Eckerle, R.; Weyh, T.; Thiringer, T. Total CO2-equivalent life-cycle emissions from commercially available passenger cars. Renew. Sustain. Energy Rev. 2022, 159, 112158. [CrossRef]
- Hao, H.; Cheng, X.; Liu, Z.; Zhao, F. Electric vehicles for greenhouse gas reduction in China: A cost-effectiveness analysis. Transp. Res. D 2017, 56, 68–84. [CrossRef]
- Das, P.K.; Bhat, M.Y.; Sajith, S. Life cycle assessment of electric vehicles: a systematic review of literature. Environ. Sci. Pollut. Res. 2024, 31, 73–89. [CrossRef]
- Alishaq, A.; Cooper, J.; Woods, J.; Mwabonje, O. Environmental impacts of battery electric light-duty vehicles using a dynamic life cycle assessment for qatar’s transport system (2022 to 2050). Int. J. Life Cycle Assess. 2025, 30, 110–120. [CrossRef]
- Naseri, H.; Waygood, E.O.D.; Patterson, Z.; Wang, B. Which variables influence electric vehicle adoption?. Transportation 2024, 1-28. [CrossRef]
- Chowdhury, V.; Mitra, S.K.; Hernandez, S. Electric Vehicle Usage Patterns in Multi-Vehicle Households in the US: A Machine Learning Study. Sustainability 2024, 16(12), 5200. [CrossRef]
- Mitropoulos, L.K.; Prevedouros, P.D. Life cycle emissions and cost model for urban light duty vehicles. Transp. Res. D 2015, 41, 147-159. [CrossRef]
- Wang, X. A view of Beijing’s traffic policy: Evaluation on the policies released in 2010 to ease traffic congestion. Macro Manag. Public Policy 2021, 3(1):45–52. [CrossRef]
- Li, G.; Walls, W.D.; Zheng, X. Differential license plate pricing and electric vehicle adoption in Shanghai, China. Transp. Res A 2023, 172, 103672. ttps://doi.org/10.1016/j.tra.2023.103672.
- Apostolaki-Iosifidou, E.; Codani, P.; Kempton, W. Measurement of power loss during electric vehicle charging and discharging. Energy 2017, 127, 730–742. [CrossRef]
- Ahmad, F.; Iqbal, A.; Ashraf, I.; Marzband, M.; Khan, I. Placement of electric vehicle fast charging stations in distribution network considering power loss, land cost, and electric vehicle population. Energy Sources Part A 2022, 1693–1709. [CrossRef]
- Ding, Q.; Wu, Z.; He, Y.; Zhou, M.; Long, S. A novel approach to transmission loss rate calculation for electricity transactions. 2017 China International Electrical and Energy Conference (CIEEC) 2017, 215–222.
- Majid, Z.S.; Arief, A.; Akil, Y.S. Minimization of Transmission Loss in Application of HVDC Networks under Load Increase Scenario. Int. J. Electr. Electron. Eng. Telecommun. 2021, 333–340. [CrossRef]
- 2006 IPCC Guidelines for National Greenhouse Gas Inventories. Intergovernmental Panel on Climate Change. 2006.
- Lajunen, A. Energy consumption and cost-benefit analysis of hybrid and electric city buses. Transp. Res. C 2014, 1–15. [CrossRef]
- Costagliola, M.A.; Costabile, M.; Prati, M.V. Impact of road grade on real driving emissions from two Euro 5 diesel vehicles. Appl. Energy 2018, 231, 586–593. [CrossRef]
- Fiori, C.; Arcidiacono, V.; et al. The effect of electrified mobility on the relationship between traffic conditions and energy consumption. Transp. Res. D 2019, 67, 275–290. [CrossRef]
- Pielecha, J.; Skobiej, K.; Kubiak, P.; Wozniak, M.; Siczek, K. Exhaust Emissions from Plug-in and HEV Vehicles in Type-Approval Tests and Real Driving Cycles. Energies 2022, 15(7), 2423. [CrossRef]
- Hao, X.; Wang, H.; Lin, Z.; Ouyang, M. Seasonal effects on electric vehicle energy consumption and driving range: A case study on personal, taxi, and ridesharing vehicles. J. Clean. Prod. 2020, 119403. [CrossRef]
- Serin, D.A.; Serin, O. Analysis of Energy Consumption and Performance of BEV, HEV and an ICEV: A Case Study of Real-Life Road Simulation. Acad. Perspect. Proc. 2022, 5(3), 50–59. [CrossRef]
- Yang, L.; Yu, B.; Yang, B.; Chen, H.; Malima, G.; Wei, Y.M. Life cycle environmental assessment of electric and internal combustion engine vehicles in China. J. Clean. Prod. 2021, 124899. [CrossRef]
- EIA. Electric Power Monthly. 2024. Retrieved from https://www.eia.gov/electricity/monthly/.
- Tian, Z.; Xia, G.; Duan, M.; Ouyang, Z.; Gong, D.; Mu, X.; Li, H. Research on Energy Efficiency Measurement Scheme for Electric Vehicle DC Charging Pile. 2021 IEEE 4th International Conference on Electronics Technology (ICET) 2021, Chengdu, China.
- National Energy Administration. Statistical data on China’s power industry. 2024. Beijing: National Energy Administration. http://www.nea.gov.cn.
Figure 1.
LCA framework for EVs in the operational phase.
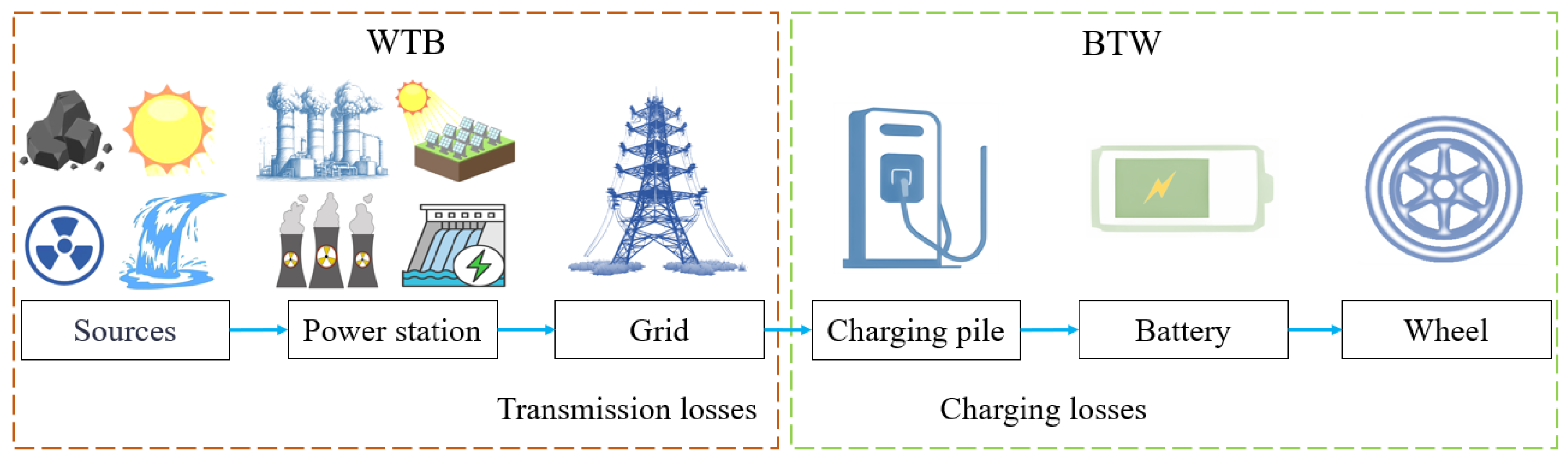
Figure 2.
LCA framework for ICEVs in the operational phase.
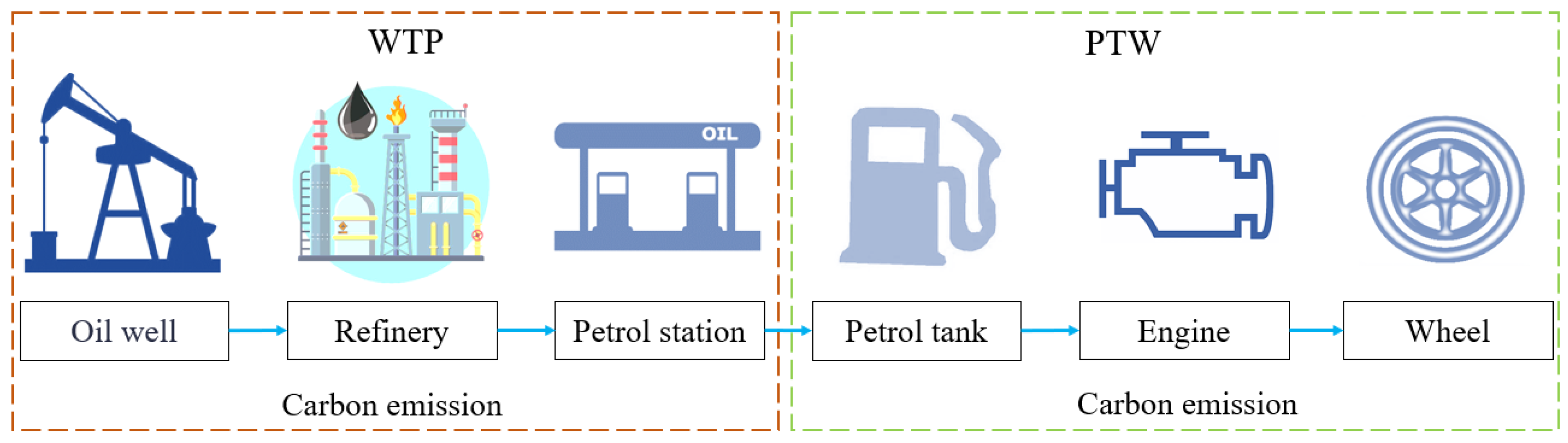
Figure 3.
Comparative carbon emissions per 100 km between EVs and ICEVs under identical annual mileage: sensitivity analysis of energy consumption and grid carbon intensity.
Figure 3.
Comparative carbon emissions per 100 km between EVs and ICEVs under identical annual mileage: sensitivity analysis of energy consumption and grid carbon intensity.
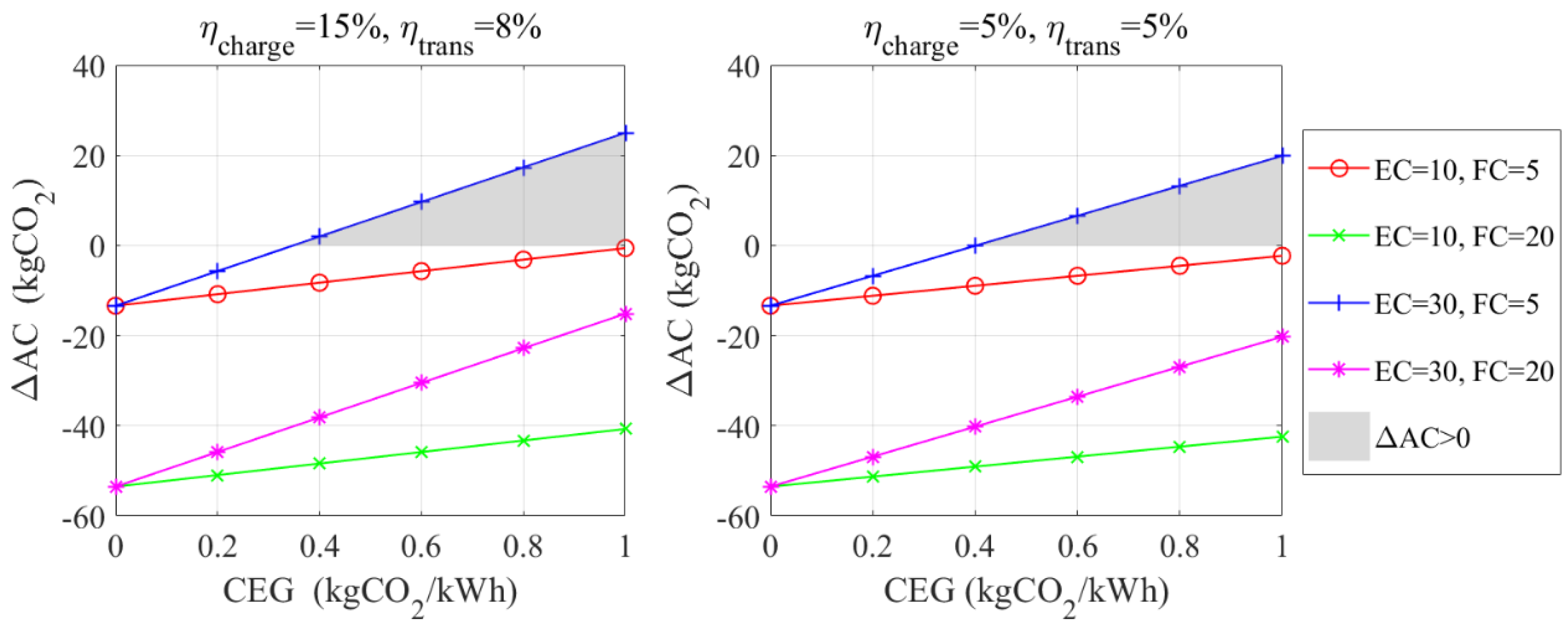
Figure 4.
Case study of carbon emissions per 100 km across vehicle classes: impact of grid carbon intensity and charging efficiency.
Figure 4.
Case study of carbon emissions per 100 km across vehicle classes: impact of grid carbon intensity and charging efficiency.
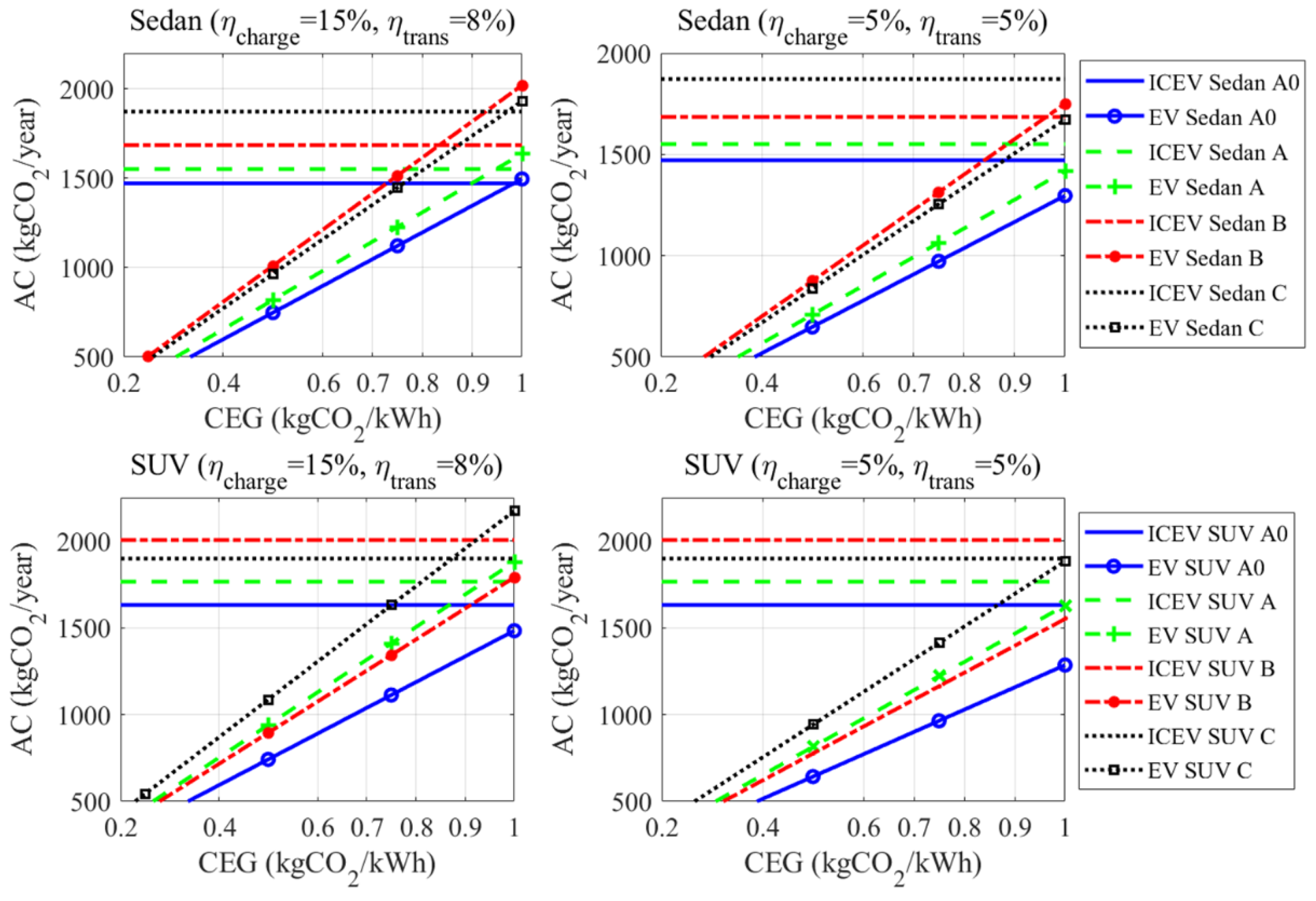
Figure 5.
Annual carbon emission disparities between EVs and ICEVs under divergent usage patterns: effect of mileage multiplier (x).
Figure 5.
Annual carbon emission disparities between EVs and ICEVs under divergent usage patterns: effect of mileage multiplier (x).
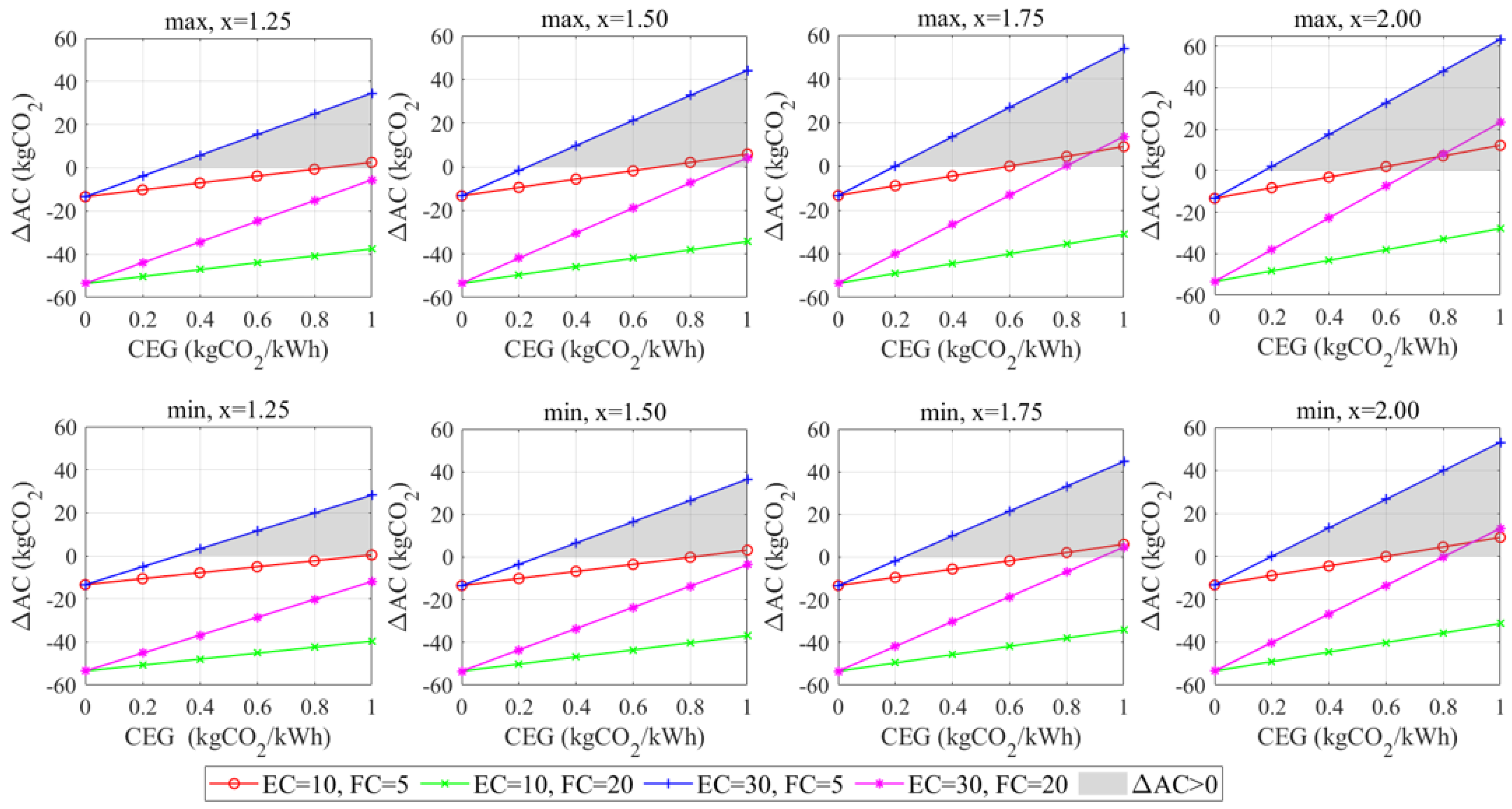
Figure 6.
Case study of carbon emissions per 100 km across vehicle classes: impact of grid carbon intensity and charging efficiency.
Figure 6.
Case study of carbon emissions per 100 km across vehicle classes: impact of grid carbon intensity and charging efficiency.
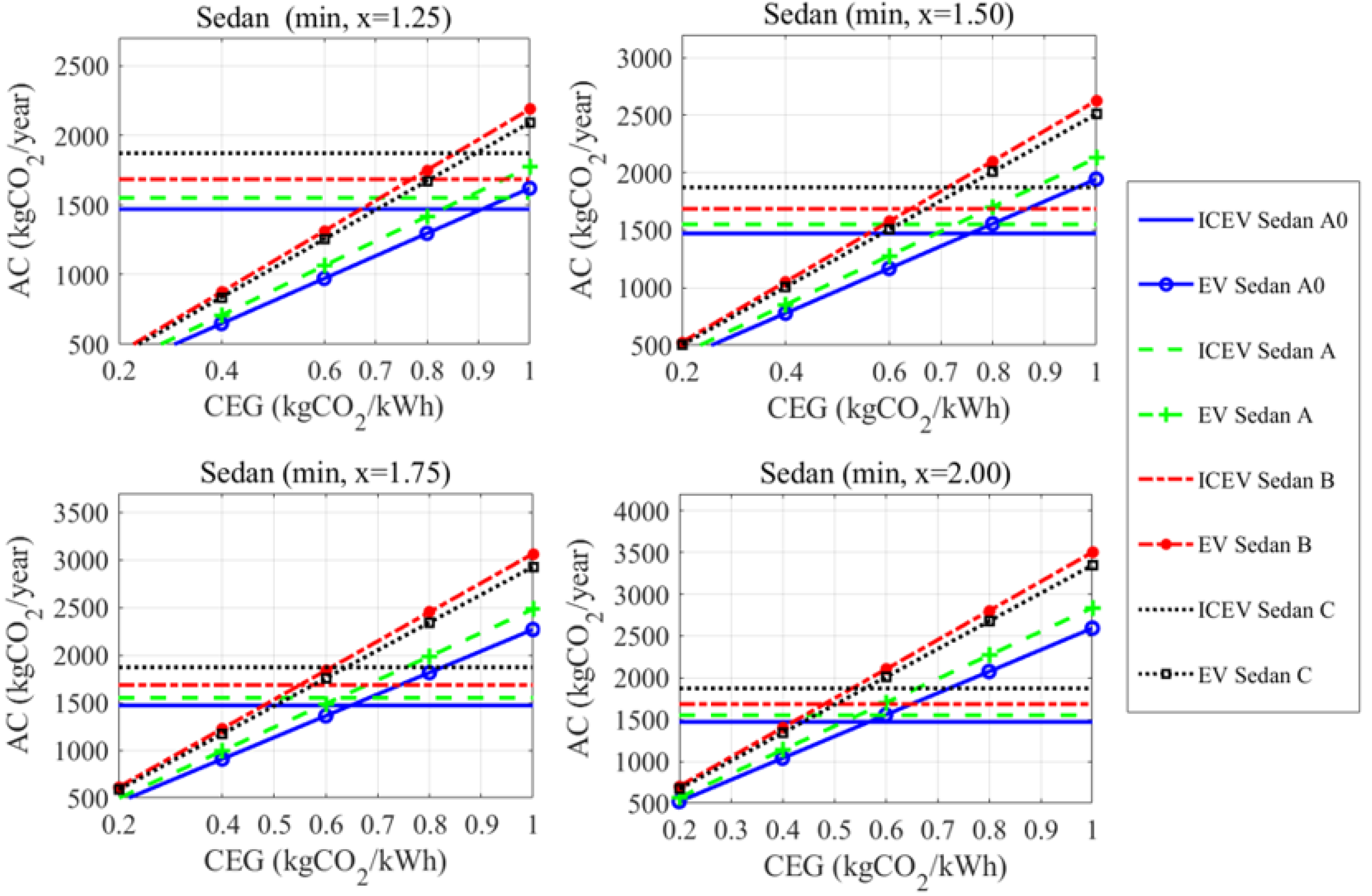
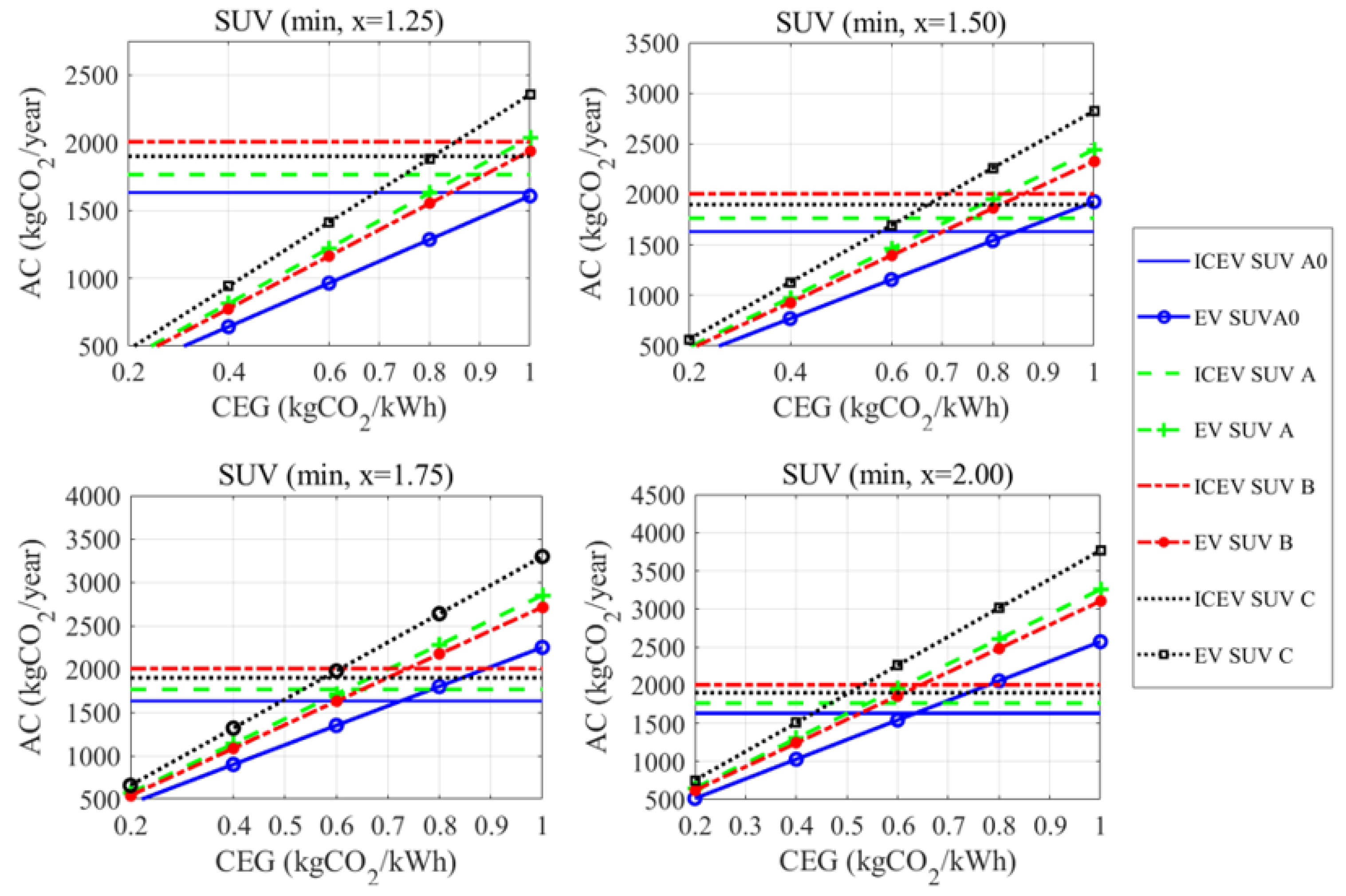
Figure 7.
Spatial distribution of case cities across China’s regional power grids (The data were derived from the official statistical report issued by the relevant government departments in 2023).
Figure 7.
Spatial distribution of case cities across China’s regional power grids (The data were derived from the official statistical report issued by the relevant government departments in 2023).
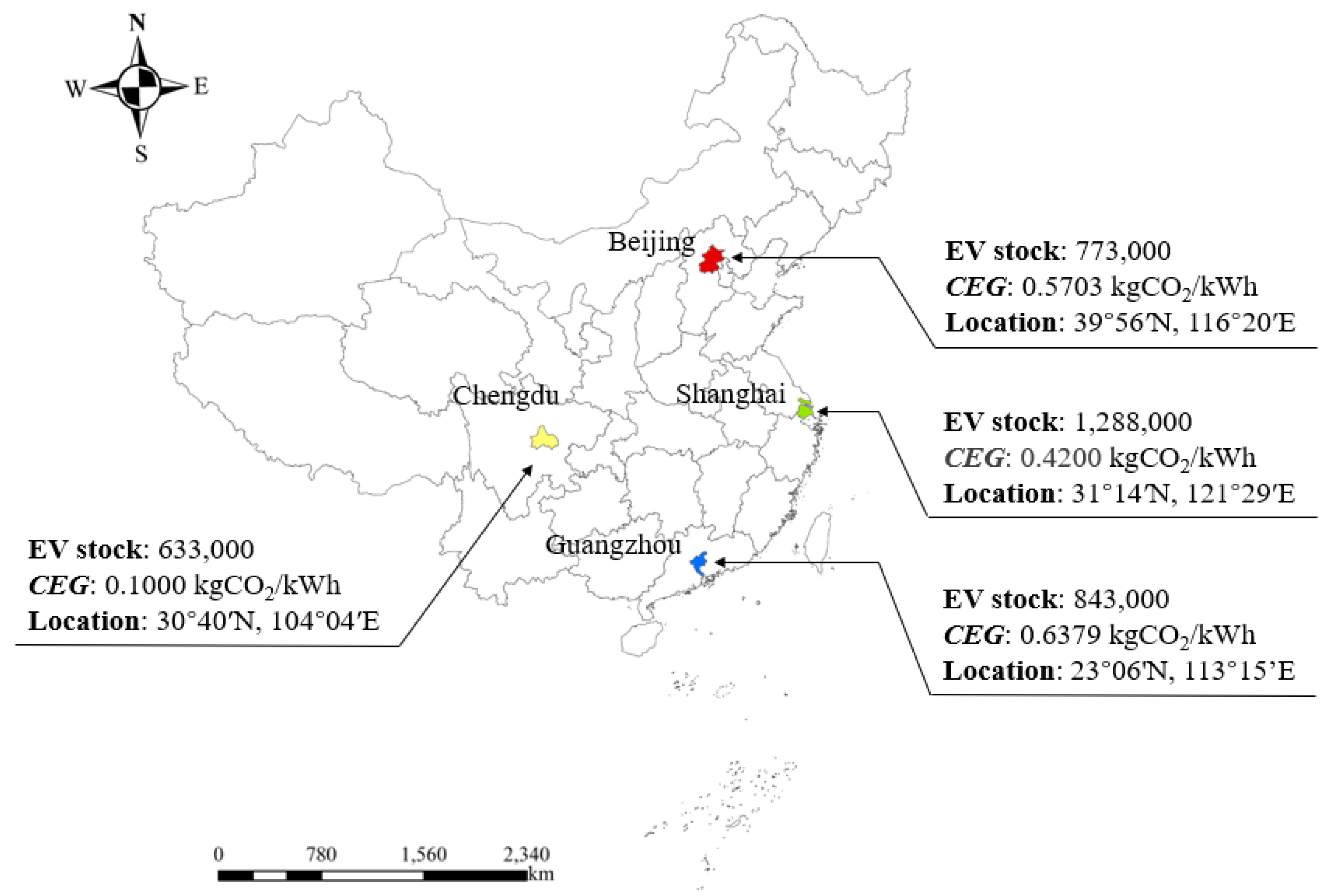
Figure 8.
Boxplot of energy consumption distributions for private EV and ICEV owners in Beijing.
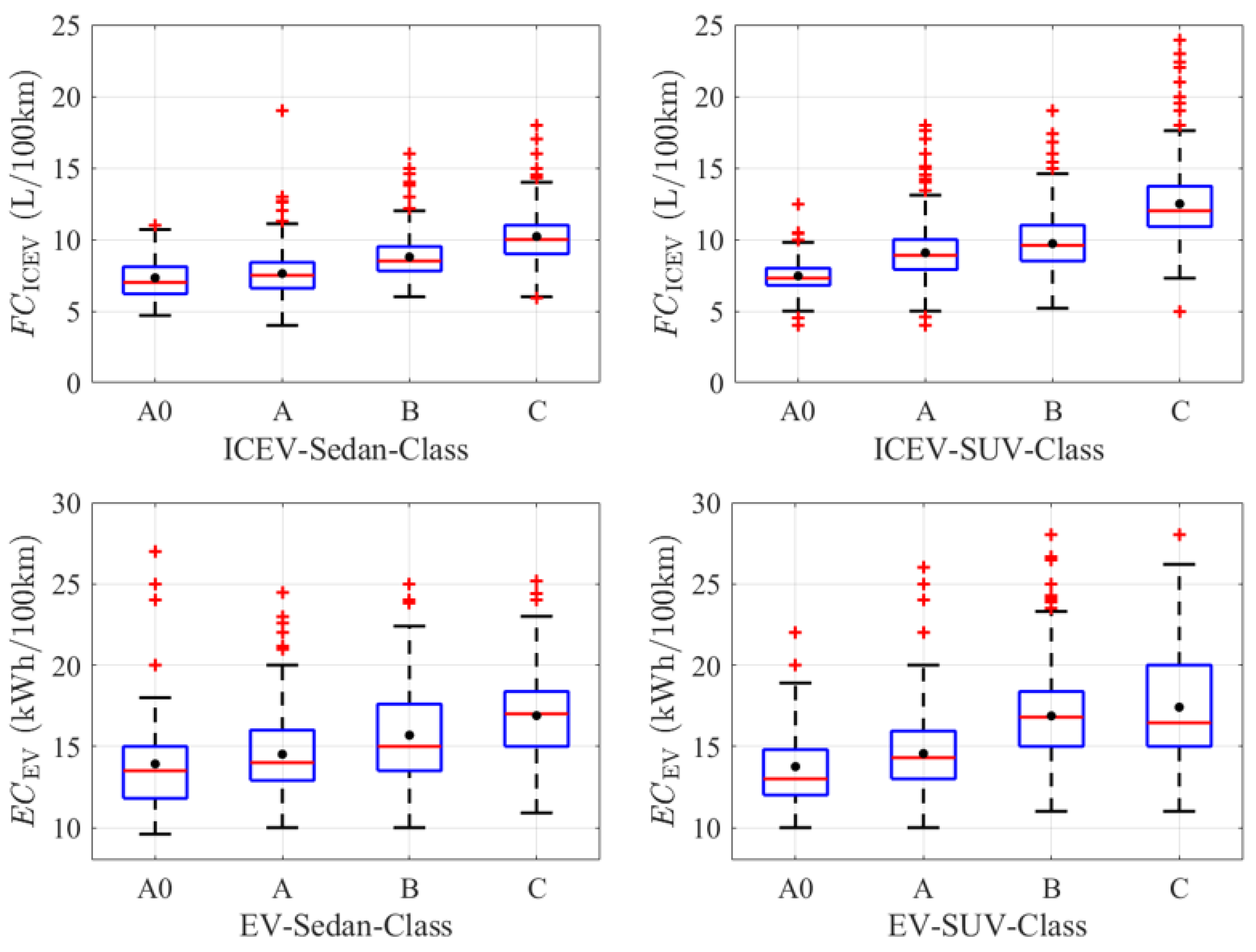
Figure 9.
Annual CO₂ emissions for ICEVs and EVs under varying annual mileage multipliers across vehicle classes and cities.
Figure 9.
Annual CO₂ emissions for ICEVs and EVs under varying annual mileage multipliers across vehicle classes and cities.
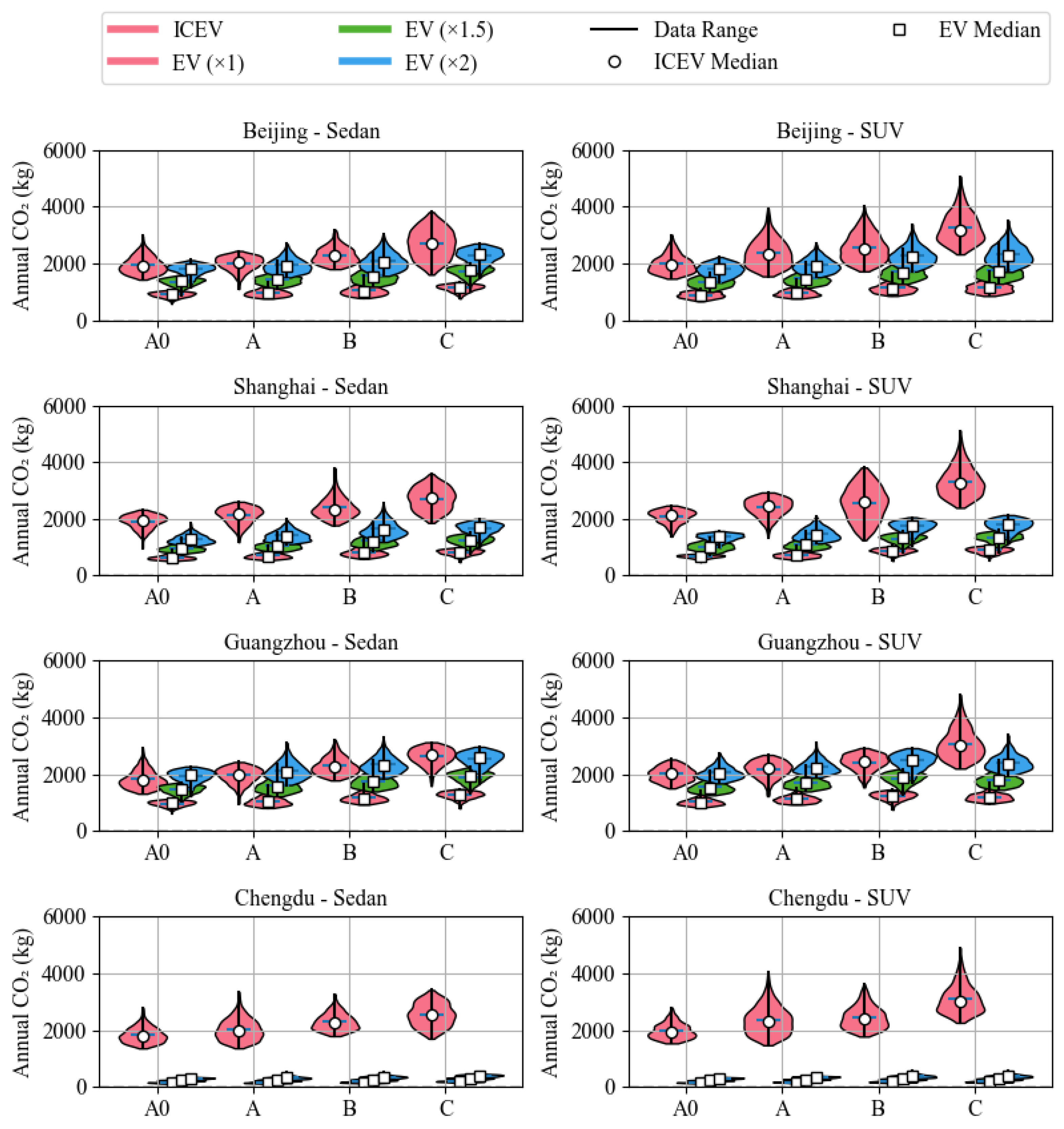
Figure 10.
Comparison of annual CO₂ emissions between ICEVs and EVs across vehicle classes and cities: ΔAC values under varying annual mileage multipliers.
Figure 10.
Comparison of annual CO₂ emissions between ICEVs and EVs across vehicle classes and cities: ΔAC values under varying annual mileage multipliers.
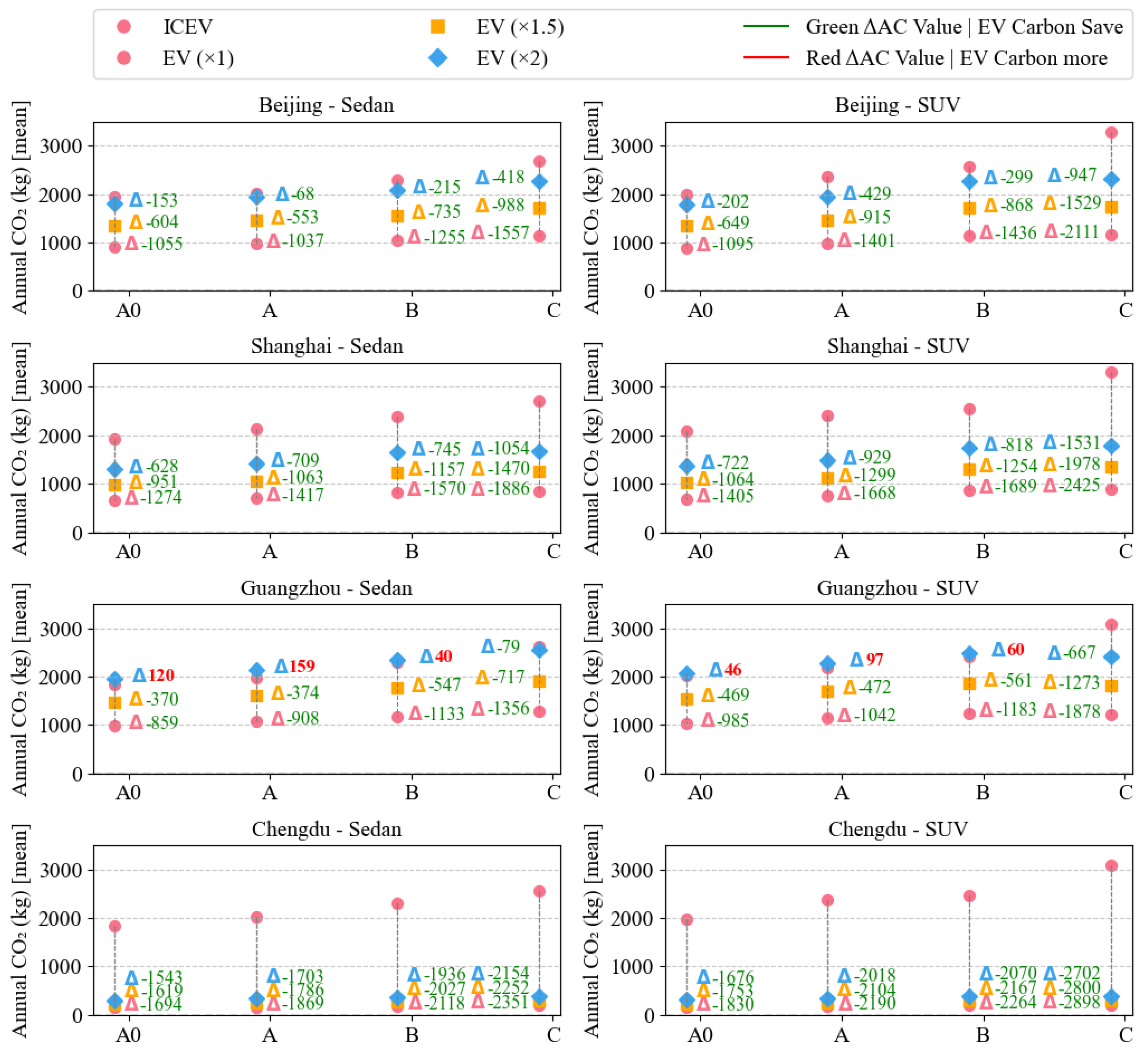
Figure 11.
Cross-class quantile comparison of EV carbon emissions: impacts of grid carbon intensity and the mileage multiplier against A-class ICEV median fuel consumption benchmark.
Figure 11.
Cross-class quantile comparison of EV carbon emissions: impacts of grid carbon intensity and the mileage multiplier against A-class ICEV median fuel consumption benchmark.
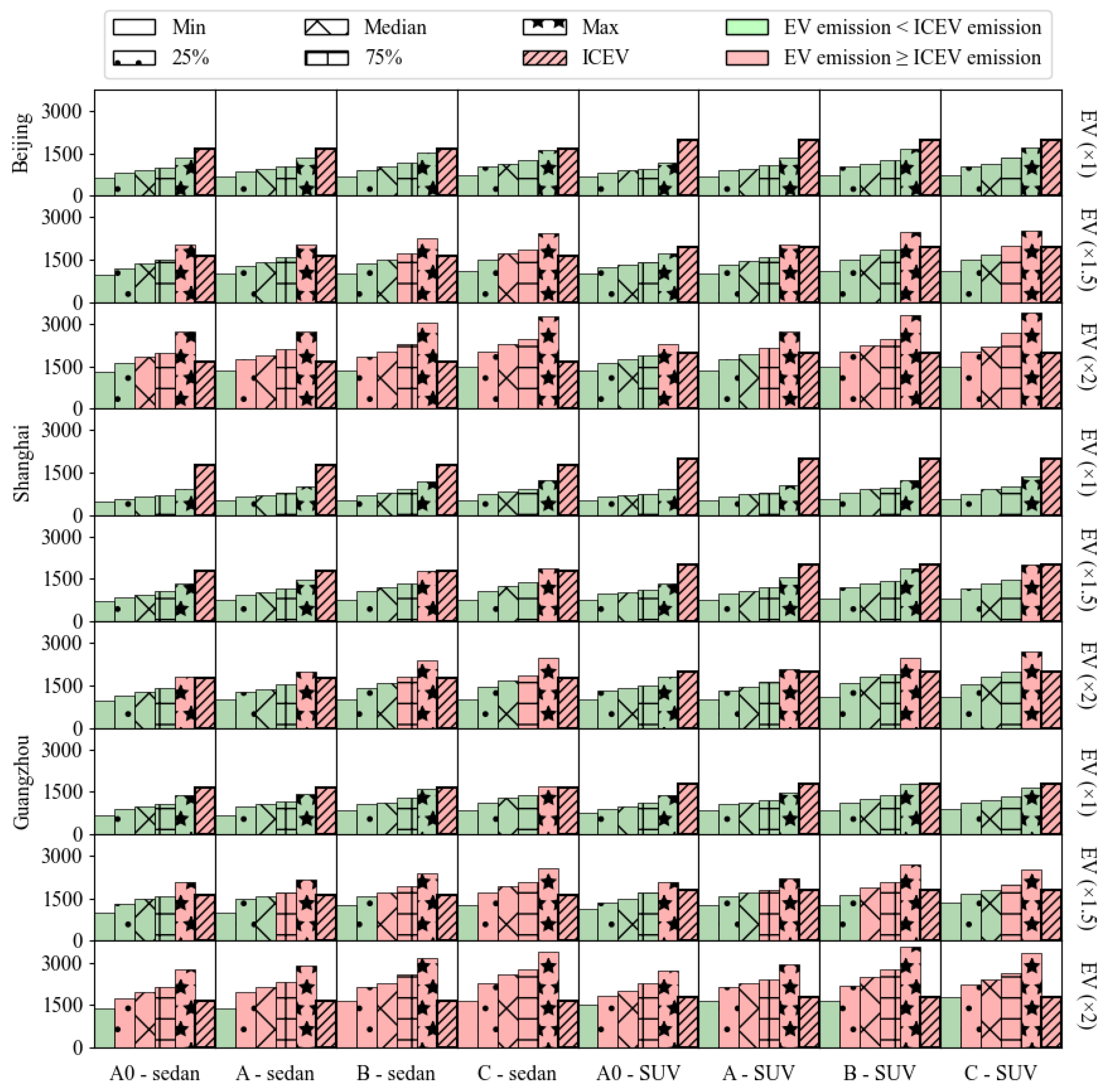

Table 1.
The energy consumption metrics of EVs and ICEVs, as reported in Zhang et al. [18].
Table 1.
The energy consumption metrics of EVs and ICEVs, as reported in Zhang et al. [18].
| ICEV type | ICEV class | FCICEV (L/100km) | EV type | EV class | ECEV (kWh/100km) |
|---|---|---|---|---|---|
| Sedan | A0 | 5.5 | Sedan | A0 | 11.7 |
| A | 5.8 | A | 12.8 | ||
| B | 6.3 | B | 15.8 | ||
| C | 7.0 | C | 15.1 | ||
| SUV | A0 | 6.1 | SUV | A0 | 11.6 |
| A | 6.6 | A | 14.7 | ||
| B | 7.5 | B | 14.0 | ||
| C | 7.1 | C | 17.0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



