
Submitted:
03 December 2023
Posted:
05 December 2023
Read the latest preprint version here
Abstract
The Schwarzschild manifold is constructed by taking a point on the Minkowski manifold and stretching it into a 4-sphere. This stretch causes gradients in the temporal and spatial coordinate densities around the sphere, leaving a hole of null space-time in the manifold centered at the spatial location of the original point. It is shown that this accurately models the Schwarzschild metric and is used to prove that radial infalling geodesics become null at the horizon and come to rest there. The light-like nature of the worldline is confirmed by analyzing it in Kruskal-Szekeres (KS) coordinates. It is shown that the worldline in KS coordinates has an undefined derivative at the horizon at any point other than the origin of the KS coordinates. It is then demonstrated that the origin of the KS coordinate system can be reached in the falling frame by exploiting the time symmetry of the manifold and that the falling worldline is indeed light-like there. The light-like nature of the worldline means that the horizon is length contracted to a point in the falling frame, such that the event horizon is proven to be the source of the Schwarzschild metric and the end point of gravitational collapse.
Keywords:
Black holes
; General Relativity
; Schwarzschild metric
1. Introduction
The Schwarzschild metric in Schwarzschild coordinates has a well-known coordinate singularity at the event horizon. This singularity is removed from the metric using coordinate transformations, with the most popular transformation being the Kruskal-Szekeres coordinates, which are regular at the horizon. However, the meaning of the the Kruskal-Szekeres coordinates in terms of spacelike and timelike basis vectors is not clear. For much of the spacetime, the Kruskal-Szekeres coordinates are mixtures of space and time such that the meaning of the slope of a worldline in these coordinates is not always clear. Nonetheless, these coordinates have been used to argue that the event horizon can be crossed by falling observers since there is no coordinate singularity in the Kruskal-Szekeres system. This has led to the acceptance of the existence of Black Holes into which objects can fall and can never escape back out to the external Universe.
In the reference text ’Gravitation’[1], the authors depict a falling worldline crossing the event horizon in Kruskal-Szekeres coordinates in Figure 32.1(b) of the text, though there is no accompanying calculation of the worldline in Kruskal-Szekeres coordinates. The only such calculation found in the literature is in [2], where the author claims to demonstrate that all worldlines are null at the horizon in Kruskal-Szekeres coordinates regardless of their state of motion. However, as the author notes in that work, the proof actually demonstrates that the Kruskal-Szekeres derivative of the falling worldline is undefined at in Kruskal-Szekeres coordinates. The author nonetheless concludes that in order for the extended spacetime to be consistent, the geodesic must in fact be null at the horizon.
The existence of Black Holes that can subsequently evaporate create an information paradox where information falling into a Black Hole is lost once the Black Hole evaporates due to Hawking radiation. Therefore, the possibility of objects falling into a Black Hole creates a physical paradox which has yet to be conclusively resolved.
If nothing was able to fall past the event horizon of the Schwarzschild metric, then there would be no information paradox to begin with. Therefore, this paper provides proof of the following hypotheses:
- The external Schwarzschild metric is describing a Minkowski manifold in which a hole has been made in the spacetime by stretching a point in space in the manifold into a 4-sphere, leaving a null space-time in the manifold inside the 4-sphere
- The internal Schwarzschild metric is describing a Minkowski manifold where the entire manifold has been compressed into a 4-sphere centered on a point in time. The 4-sphere is surrounded by null space-time
- The consequence of the first two hypotheses is that the internal and external Schwarzschild metrics are describing two separate, disconnected spherically symmetric spacetime manifolds
- The worldline of radially falling frames become null at the event horizon and the horizon itself becomes length contracted to a point in the falling frame as the frame approaches the horizon. The consequence of this is that the event horizon is the source of the Schwarzschild metric and the end point of gravitational collapse
Therefore, in this work, the analysis done in [2] is extended, providing an unambiguous proof that the falling worldline is null at the event horizon without having an undefined Kruskal-Szekeres derivative at the horizon.
2. Creating a Hole in the Minkowski Manifold
The Schwarzschild metric is the simplest non-trivial solution to Einstein’s field equations. It is the metric that describes every spherically symmetric vacuum spacetime. The the external form of the metric can be expressed as:
Equation 1 is the external metric (where with t being the timelike coordinate and r being the spacelike coordinate. The Schwarzschild radius of the metric is given by in units with and is commonly known as the Event Horizon. The external metric is the metric for an eternally spherically-symmetric vacuum centered in space.
But this metric comes from assuming a stress-energy tensor that is zero everywhere, meaning there is no mass anywhere in the manifold, even at the center. Therefore, this metric is describing a spherically symmetric Minkowski-like manifold (not in the sense that the manifold is flat, but in the sense that there is no matter or energy present anywhere in the metric). The question then becomes: how can the Minkowski manifold, which is massless everywhere, be deformed to give us the Schwarzschild metric?
Let us imagine Minkowski space-time which is flat everywhere in space and time. We choose a point in space (at all times) on the manifold and label it as the spatial origin . Thus we use spherical coordinates to describe the metric with r as the spacelike coordinate. For future clarity, we will label the Minkowski time coordinate , representing the proper time of observers at rest in their own frame.
Now we make a hole in the manifold by stretching the space-time at the point into a 4-sphere (because the hole is in space as well as in time at that location in space). In doing so, we have done two things:
- We have given the manifold an intrinsically spherical shape with an intrinsic center
- We have created a null space-time in the region inside the 4-sphere where space and time itself are absent (this would be the definition of creating a hole in the manifold)
So we assert that the Schwarzschild metric, which is the only spherically-symmetric solution to Einstein’s field equations describes 3 distinct, separate manifolds. When , we get the manifold described above where there is a hole in the Minkowski manifold. The spacetime is not flat anywhere in this metric. We cannot actually set r to infinity in this metric, as this is mathematically dubious. The best we can do is say that the spacetime approaches the Minkowski space-time as approaches zero. The Minkowski metric is only achieved when . Since , we might think that this means that the Minkowski metric is just the Schwarzschild metric when there is no mass present on the manifold. But this is false. As mentioned previously, the Schwarzschild metric comes from solving the field equations with a zero stress-energy tensor (and assuming spherical symmetry). So the Schwarzschild metric with non-zero already assumes no mass or energy anywhere on the manifold. Therefore, by setting , we are really saying is that there is no hole in the Minkowski manifold.
The internal metric, where , is yet another distinct manifold. Note that we used u instead of because for the internal case, u is a timelike radius, not a spacelike radius, and the definition does not apply to this internal manifold. The internal manifold will be discussed further in Section 3 and a much deeper analysis of the internal metric is the topic of a future work.
Returning our attention to the external metric with non-zero , we will now examine how the stretching of a point into a 4-sphere to create the hole in the manifold affects the Minkowski coordinates. Since the manifold is continuous, it is helpful to make an analogy here to true strain in a perfectly elastic material in continuum mechanics. Since we are stretching the center of the manifold from a point into a 4-sphere (as opposed to just ’cutting a hole out of the manifold’) with a finite radius, both the space and time will be strained by the stretch such that their strain is zero infinitely far from the hole.
We can characterize this strain as follows. We start with Minkowski space-time with a point designated and a second point r some distance away from that point such that the distance r is greater than the radius of the hole being created. We now stretch the point at into a hole with radius . The true strain is defined as:
Where is the final length and is the initial length and the ratio:
is known as the "stretch factor". In this case, the initial length is the distance from r to 0, . The final length after the stretch is . Substituting into equation 4 we get:
The strain goes to 0 as and goes to negative infinity (infinite compressive strain) when . The strain analogy is also useful when considering the speed of light in the Manifold as will be demonstrated below.
We can visualize the effect of the hole on the coordinates by looking at a space-time diagram in one spatial direction (the space-like axis represents a single ray emanating from the center of the manifold). Figure 1 shows the coordinates after the hole has been introduced into the manifold overlaid on top of the original Minkowski manifold. The curved lines represent the time coordinate t on the deformed manifold, and the non-uniformly spaced vertical lines represent the space coordinate (which we will call s to distinguish them from the r Minkowski coordinate) on the strained manifold.
Let us focus on the coordinate singularity coming from of the Schwarzschild metric in equation 1. We can see why goes to infinity in the metric when looking at Figure 1. In the figure, the spacing between the s coordinates lines relative to the r coordinate lines goes to zero at as a result of the strain from the hole. We can formalize this with the coordinate transformation:
Substituting this into equation 1, the metric becomes (ignoring the angular term):
Therefore, of the r coordinate, representing the magnitude of the vector goes to infinity at because the magnitude of the vector, representing the proper distance basis vector goes to zero at . In other words, for regions close to , a small change in r leads to a large change in s because the s coordinate is so closely spaced relative to the r coordinate there. So by changing the spacelike coordinate from r to s, we have removed the coordinate singularity in the metric. We also note that the speed of light in this metric is given by:
Returning to the strain analogy from equations 3 and 4, note that the manifold density at r will be inversely proportional to the stretch factor at r. More formally, we can say:
Where is the stretch factor infinitely far from the hole and is the density infinitely far from the hole. We can define , meaning we define the density of the Minkowski manifold as 1, which gives us the relationship:
Combining equations 9 and 7 we obtain the relationship between the speed of light and the manifold density:
Which is the same way in which the speed of sound is related to the density of an elastic material with a Young’s modulus of . This also tells us that where and are the vacuum permeability and permittivity.
Now let us shift our focus to the time coordinate. Since the hole is a 4D sphere, meaning that the time coordinate is also affected by the hole as depicted in Figure 1, the time dimension will also be infinitely strained at the horizon, which is what is depicted in Figure 1. This is captured by the relationship:
The spacing of the s coordinate is simple to understand because the coordinates are vertical and parallel. But the deformed time coordinate is more interesting due to the curvature of the coordinate lines. Let’s take one of these t coordinate lines and show the orientation of the s and t basis vectors at different distances from the edge of the hole in the frame of an inertial observer falling from infinity. Figure 2 depicts this situation. The s basis vectors are horizontal and the t basis vectors are normal to the tangent of the t coordinate line. The decreasing lengths of the vectors reflects the decrease in the distance between coordinate lines of each basis as is approached.
In Figure 2, we see that goes to infinity at because we measure in the direction of the t basis vector at r. As r approaches , the t basis vector rotates relative to the basis, resulting in infinite density as the frame approaches (see Figure 1).
Figure 2 illustrates why an inertial observer is accelerated in the deformed manifold. In Minkowski spacetime, an inertial frame moves at the speed of light in their frame’s direction. This is also the case in the Schwarzschild manifold. The difference is that with the Schwarzschild manifold, the inertial observer’s vector is not perpendicular to the vector. Therefore, the inertial frame still moves at the speed of light in the direction, but this vector now has a component in the direction. So the inertial frame’s motion (which in Minkowski space was motion only in time), has components in both the and directions. At infinity, all motion is in the direction, but at any finite distance, the vector will have components in both the and directions. As r decreases during the fall, the magnitude of the component decreases and the magnitude of the component increases (giving the acceleration) until at , all the motion is in the direction, indicating that the inertial frame becomes null there (it moves through space at the speed of light).
Figure 3 shows the tilted vector multiplied by the local speed of light c with its components in the and r directions from the Minkowski manifold. On the right side of the figure, we divide all sides of the triangle by such that the length of the hypotenuse becomes just the speed of light at r and the components become temporal and spatial velocities of the frame.
From this triangle, we get:
And given that , we see that equation 12 is exactly the metric in equation 6, indicating that the way in which the t and s coordinates have been modelled in Figure 1 and Figure 2 is accurate.
So we have seen how the falling observer is modelled in these coordinates, but how can we understand the proper acceleration of the rest frame in this manifold? In Minkowski spacetime, a frame feels acceleration when there is a gradient in their spatial velocity over time. The magnitude of this acceleration at a given time is given by the gradient of the spatial velocity over time at that time. The rest frame in the Schwarzschild manifold can be thought of in a similar manner except the proper acceleration is a function of the gradient of the rest frame’s temporal velocity gradient over space. The magnitude of the rest frame’s proper acceleration at a given location is given by the gradient of the temporal velocity over space at that location. The temporal velocity of the rest observer at r is the proper acceleration of the rest observer is:
Which is the expression for the proper acceleration of an observer at rest at r [3].
Furthermore, if we imagine a region of spacetime where the rest frame’s was constant over r (this could also be a stationary point on the curved t coordinate), then an observer at rest at r would have her time dilated relative to the rest observer in Minkowski space-time, but the observer would be inertial (i.e. the observer would not need to accelerate to stay at rest) since the gradient of the time dilation in that case would be zero. An observer in free fall in this scenario would accelerate up to the region where the gradient is zero and then continue falling at a constant speed relative to rest observers while in that region of the space-time.
Finally, reference [4] tells us that for an observer falling from rest at is given by:
Combining equations 14 and 5, we get the needed derivative:
These are the velocity of an observer falling from rest at in r and s coordinates. We can see from this that in s and t coordinates, which yield a metric without a coordinate singularity, the falling observer comes to rest at . Equation 7 also indicates that light also comes to rest there.
Thus, we have shown that the geodesics of inertial observers become null at the edge of the hole and that there is no space-time inside the hole. Furthermore, the inertial geodesic remains at due to the fact that the length of the s and t basis vectors go to zero at per Figure 2. We can also see that the geodesic remains at the horizon by looking at equation 15. We use equation 15 instead of equation 14 because the and densities are the same at any given r. This velocity goes to zero when , proving that the geodesic remains at rest there.
Note that the magnitude of this velocity increases to a maximum at some (maximizing at in the case of an observer falling from infinity) and then decreases to zero at . We can see why this is the case by re-expressing equation 15 as:
The part comes from the orientation of the vector relative to the vector (quantified by the second square root in equation 15). This quantity increases during the whole fall until it reaches 1 at . The first square root in equation 15 represents c, which decreases during the fall. The magnitude of c changes the length of the vector per Figure 3. Therefore, the magnitude of for the falling observer is increased during the fall due to the change in orientation of the vector, and is reduced due to the change in the length of the vector. When the effect of the change in the orientation of the vector on the component is greater than the effect of the reduction in length of the vector, will increase. But at some point, depending on where the fall started, these changes will balance each other, which is where the magnitude of is maximized, after which the effect from the reduction in length of the vector becomes dominant, decreasing the magnitude of to zero at .
Creating the Schwarzschild manifold by making a hole in the Minkowski manifold makes the fact that geodesics come to rest at intuitive since there is by definition no space-time inside the hole of the manifold, so there is nowhere else in space for the geodesics to go, they must remain at rest there. In fact, if one begins by postulating that creating a hole in the Minkowski manifold is equivalent to introducing a stretch factor over the manifold and that the speed of light over the manifold is equal to (which amounts to postulating equation 10), then one can derive the Schwarzschild geometry using the presented analysis without needing to solve the field equations.
It has been proven that the free-falling geodesics in the Schwarzschild manifold in singularity-free coordinates become null at and that null geodesics remain at , meaning that is the endpoint of gravitational collapse. If this is true in one set of coordinates, it must be true in all coordinates. We will examine these geodesics in two other coordinate systems in this paper, the Kruskal-Szekeres and Eddington-Finkelstein coordinates. It will be shown that while a cursory look at the metric in these coordinate seems to indicate that the horizon is traversable, when we carefully examine free-falling geodesics in these coordinates, we get the same results as found above, which should be expected.
3. A Note on the Internal Schwarzschild Metric
The internal Schwarzschild metric (where is the inverse of the deformed Minkowski manifold described above. The internal metric describes a separate manifold where the entire Minkowski manifold has been compressed down to a 4-sphere of finite r, where r is the timelike coordinate in this case. The sphere is surrounded by null space-time. This manifold is also intrinsically spherical with an intrinsic center. The fact that the manifold itself has an intrinsic center is why we get a curvature singularity there. A detailed examination of nature of the internal metric will be the topic of a followup work where it will also be shown that due to cosmological reasons, a real geodesic can never actually reach the horizon. But in the rest of this paper, we will examine the inertial geodesic in Kruskal-Szekeres coordinates to show that the key results found here, namely that the free-falling geodesic becomes null at the horizon and that the geodesic does not cross the horizon, can be deduced from the Kruskal-Szekeres coordinate chart as well.
4. The Falling Frame of the External Metric in Kruskal-Szekeres Coordinates
The Kruskal-Szekeres coordinates are the maximally extended coordinates for the Schwarzschild metric. The coordinate definitions and metric in Kruskal-Szekeres coordinates are given below (derivation of the coordinate definitions and metric can be found in reference [5] where and ).
With the full metric in Kruskal-Szekeres coordinates given by:
Finally, we plot the metric on the Kruskal-Szekeres coordinate chart [6] in Figure 4:
In this paper, we will be focusing on region I in this chart, which is the spherically symmetric spacetime around a spherically symmetric source in space.
We can see in Figure 4 that for a rest frame (), that depends on the value of t we evaluate the derivative at since the derivative for the rest frame is the tangent to the hyperbola at t. Since the metric is time-symmetric, we know that the actual physics does not depend on the value of t and therefore, we need a deeper understanding of the meaning of the changing in the rest frame and how it relates to the falling frame at the same point.
The time symmetry of the metric tells us that we can hyperbolically rotate the spacetime (rotate the t coordinates in the coordinate chart) without changing the physics. For example, Figure 5 shows two identical worldlines hyperbolically rotated relative to each other on the Kruskal-Szekeres coordinate chart.
These worldlines are the same because and are the same for both worldlines, such that their proper lengths are the same. So the time translation symmetry of the metric translates to hyperbolic rotational symmetry on the Kruskal-Szekeres coordinate chart.
We can use this fact to change how we visualize the worldline of an observer falling toward the horizon. Rather than drawing the line from at some r to at the horizon, we can continuously hyperbolically rotate the space as the observer falls such that the ’present’ state of the falling frame is always at . An example of this is given in Figure 6.
In Figure 6, the observer begins falling at . This is represented by the rightmost point on the X axis in the diagram. After , the observer has fallen to a lower radius represented by the point to the left of the rightmost point. So rather than having the worldline grow up from as time passes, we hyperbolically rotated the worldline points down as time passes to keep the present point of the worldline on the X axis. This is a valid way of visualizing the worldline as a result of the time symmetry of the metric.
When using this construction, we see that the falling worldline reaches the point on the diagram. And if the worldline does indeed become null at the horizon, this means the worldline remains on the line since that is the null geodesic representing the horizon.
It is notable that since the lines are null geodesics at the same point in space (), this means that all falling frames reach the horizon simultaneously regardless of where or when they begin falling relative to each other. This fact is more evident when drawing the worldlines the traditional way where they reach the horizon at . If two frames start falling from different radii at , they will intersect the the horizon at at different points along the line in the coordinate chart. But the proper distance between those points is zero and they are both at the same point in space, therefore the two points are in fact coincident.
There appears to be a conflict between the construction in Figure 6 and the traditional construction which has the worldline reach the horizon at along the line where T and X are greater than zero. This conflict is significant because the construction presented here shows a worldline that becomes null at the horizon whereas the traditional construction has a non-null worldline at the horizon. It is impossible for both to be true and therefore the discrepancy must be resolved. To resolve this conflict, we need a more detailed examination of the falling frame’s worldline in Kruskal-Szekeres coordinates.
Let us first take the differentials of T and X in equations 17:
Calculating the partial derivatives, rearranging and defining we get:
Next, we need to calculate from equations 20 by factoring out from each equation and dividing:
This equation is the same equation derived in [2] but put in a slightly different form. Next, we make the following definitions:
This is the derivative of the rest frame at t since plugging into equation 21, we get . Since we know the Schwarzschild metric is independent of t, this derivative must be a non-physical artifact of the Kruskal-Szekeres coordinates at fixed r and is not related to any actual change in motion through space and time.
And we define the relative velocity of the frame in motion relative to the rest frame as:
This is the relative velocity in Kruskal-Szekeres coordinates between the frame in motion and the rest frame at r. This derivative is 0 for the rest frame since in that frame. If we combine equations 23 and 14 we get:
Which is well behaved and equal to -1 when . Plugging these definitions into equation 21, we get:
We recognize that equation 25 is the relativistic velocity addition formula giving us the total velocity as the relativistic sum of the rest frame velocity and the relative velocity between the moving frame and the rest frame. We can solve for to get an expression for the relative velocity between a frame in motion and the rest frame in Kruskal-Szekeres coordinates:
Assuming that ranges from -1 to 1 and , we see that the relative velocity approaches 1 or -1 for all as the horizon is approached since the horizon is at , such that there. Equation 26 is also constant along a given hyperbola (i.e it is independent of t) since it represents the relative velocity between the moving and rest frames.
Equation 26 is essentially a hyperbolic rotation of a given worldline point along a hyperbola of constant r to . The reason this gives us the relative velocity is that at , the Schwarzschild basis vectors and Kruskal-Szekeres basis vectors are aligned there, meaning that the X and T in are pure spacelike and timelike basis vectors and thus the derivative gives a true velocity relative to the rest frame. This is in contrast to the general which is a derivative without a clear spacetime meaning since the X and T coordinates are mixtures of space and time everywhere else.
It is also notable that equation 25 is undefined when because since there and there, we get:
This is also what was demonstrated in [2]. Therefore, under these conditions, and are undefined at the horizon when T and X are greater than 0. This suggests that there is a discontinuity in the worldline when reaching the horizon at , even in Kruskal-Szekeres coordinates.
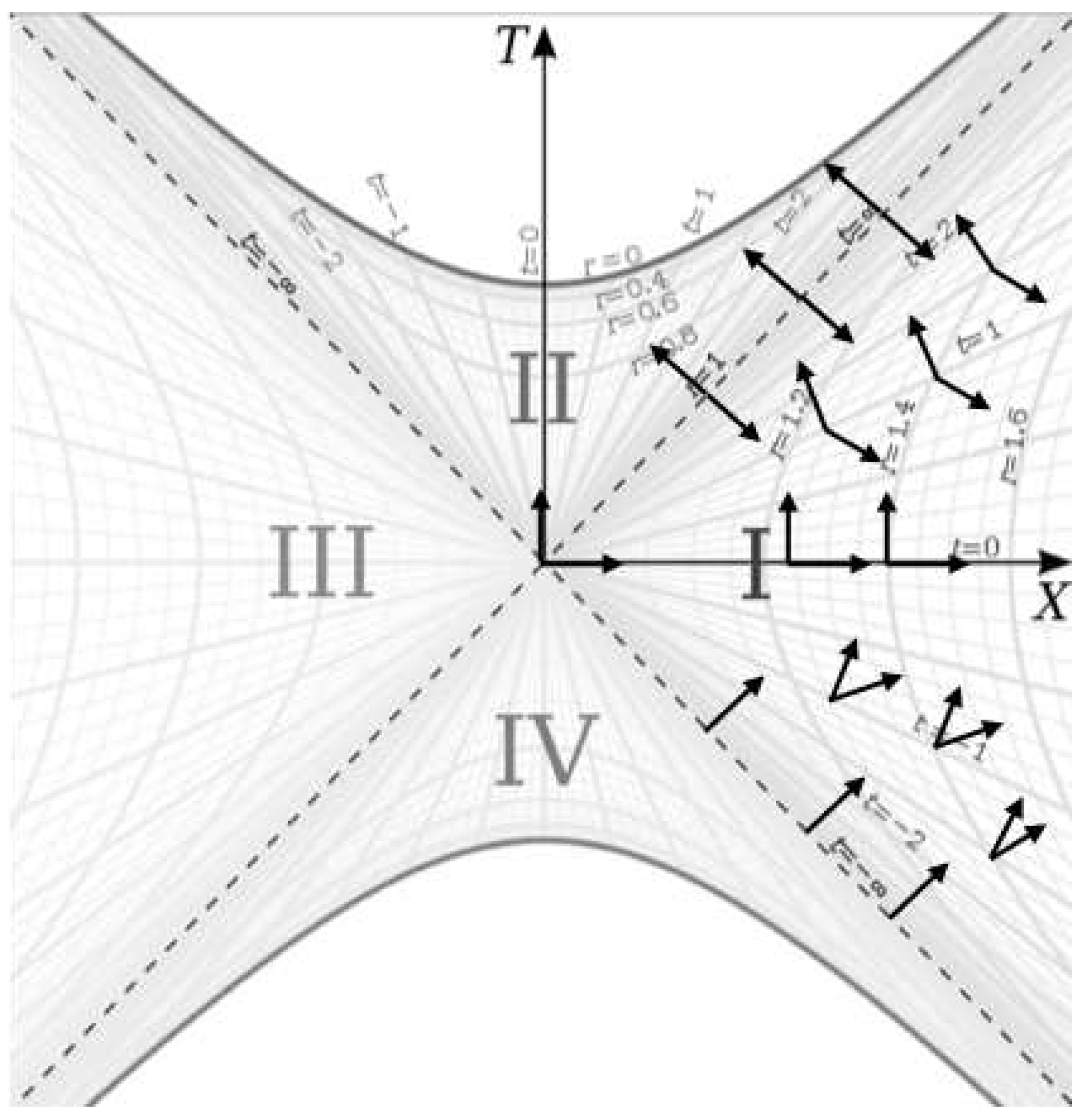
Figure 7 can help us see why equation 21 becomes undefined at the horizon by depicting the space and time axes of the rest frames at different points on the Kruskal-Szekeres coordinate chart.
Along the X axis, the space and time bases are orthogonal and aligned with the Kruskal-Szekeres basis vectors. As t moves away from 0 in either direction, the rest frames in which the derivative is measured become increasingly Lorentz boosted. These boosts are an artifact of the Kruskal-Szekeres coordinates and not physical boosts. We know this because is a Killing vector. So if we move along a hyperbola of constant r, the space-time bases are boosted as t increases, but we know that the frame of the rest observer does not change over time due to the time symmetry of the manifold.
That the derivative is measured in increasingly boosted rest frames over time in Kruskal-Szekeres coordinates is not a problem anywhere except at . At those locations, the rest frame is infinitely Lorentz boosted such that the space-time bases are collinear because the rest frame is light-like at the horizon. In a light-like frame, the relative state of motion of other frames cannot be determined because in the light like frame, one cannot make measurements of space and time due to the collinearity of the bases.
Now let’s calculate the situation described in Figure 6 where we calculate the worldline falling along the X axis as the past worldline is hyperbolically rotated down. For this construction, we set in the equations since the derivative is always taken on the X axis. For this calculation, we put the metric in the following form (we will be examining radial infall so ):
Since we are keeping , we can use the inverse of equation 24 for in the equation. We can solve for r in terms of X by setting for the X equation in equation 17 and solving for r:
Where W is the Product Log function. Substituting equations 29 and 24 into equation 28 allows us to integrate the worldline along the X axis:
Which goes to 0 as X goes to 0. But we can now show that this is exactly equivalent to falling in Schwarzschild coordinates by first using equation 20 to solve for when :
Substituting equations 31 and the inverse of 23 into equation 28 gives:
And we can see that Equation 32 is in fact the Schwarzschild metric in Schwarzschild coordinates.
Therefore it has been proven that the worldline construction shown in Figure 6 is equivalent to falling in Schwarzschild coordinates and it has been demonstrated that the worldline in that construction is light-like at the horizon. When we couple this finding with the fact that the Kruskal-Szekeres derivative is undefined at the horizon for any construction in which the worldline reaches the horizon at , we can conclude that the event horizon is length contracted to a point in a falling frame approaching the horizon as a result of the fact that the worldline becomes null there.
Furthermore, we see from equation 31 that is zero at . Therefore, the falling frame remains at the horizon along the lines in the Kruskal-Szekeres coordinate chart when it reaches the horizon.
5. The Falling Frame of the External Metric in Eddington-Finkelstein Coordinates
It has been shown using two different methods that the worldline of the falling observer becomes null at the horizon. If this is true in one system of coordinates, it must be true in all coordinate systems as a change of coordinates cannot change the physics of the manifold.
Nonetheless, let us examine another important coordinate system used to analyze the Schwarzschild metric, the Eddington-Finkelstein coordinates.
The metric in Eddington Finkelstein coordinates (with ) for infalling particles is given by:
Where v is defined as:
Infalling null geodesics are given by the condition . If we take the derivative of equation 34 and apply equation 14 for the observer falling from rest at we obtain:
Which, once again gives at the horizon, meaning the worldline’s derivative is undefined there as was the case with the Kruskal-Szekeres coordinates when we try crossing the horizon at .
But we can take another approach and set and check where the worldline meets that condition. So we find where . For this condition, we require:
Which is satisfied when . Therefore, we find that the radial infalling worldline can also be shown to be null at the horizon in Eddington-Finkelstein coordinates
6. Conclusion
Given the above analysis, it can be concluded that the external Schwarzschild metric can be accurately modeled by starting with the Minkowski manifold and stretching a point in that manifold into a 4-sphere. This stretching of a point into a sphere leaves a hole in the manifold of null space-time and makes the coordinate densities of both the space and time bases a function of position where the densities are infinite at the edge of the hole and decrease to 1 (the coordinate density of flat space-time) infinitely far from the hole. This model allows us to accurately model the dynamics of the Schwarzschild space-time using geometric techniques and allows the derivation of the proper acceleration of the rest observer using basic trigonometry. It was proven that the horizon (the edge of the hole) is indeed the endpoint of gravitational collapse and that all geodesics become null there.
A detailed analysis of the falling inertial geodesic was carried out in Kruskal-Szekeres and Eddington-Finkelstein coordinates as well. It was demonstrated that the same results mentioned above, namely the horizon being the end point of gravitational collapse where all geodesics become null, can be derived from those metrics as well.
Finally, the internal metric describes a separate spherically symmetric manifold which is the inverse of the external manifold. This manifold can be constructed by compressing the Minkowski manifold into a 4-sphere surrounded by null space-time and reversing roles of the space and time coordinates. Detailed analysis of the internal metric will be the topic of a followup work.
Data Availability Statement
All data generated or analysed during this study are included in this published article [and its supplementary information file].
Conflicts of Interest
There are no competing interests
References
- Misner, C.; Thorne, K.; Wheeler, J. Gravitation; Number pt. 3 in Gravitation, W. H. Freeman, 1973.
- Mitra, A. Kruskal Dynamics for Radial Geodesics. International Journal of Astronomy and Astrophysics 2012, 2, 174–179. doi:10.4236/ijaa.2012.23021. [CrossRef]
- Raine, D.; Thomas, E. Black Holes a Student Text; Imperial College Press, 2015.
- Augousti, A.; Gawełczyk, M.; Siwek, A.; Radosz, A. Touching ghosts: Observing free fall from an infalling frame of reference into a Schwarzschild black hole. European Journal of Physics - EUR J PHYS 2012, 33, 1–11. doi:10.1088/0143-0807/33/1/001. [CrossRef]
- Carroll, S.M. Lecture Notes on General Relativity, 1997, [arXiv:gr-qc/9712019v1].
- Figures 4, 5, 6, and 7 are modifications of: ’Kruskal diagram of Schwarzschild chart’ by Dr Greg. Licensed under CC BY-SA 3.0 via Wikimedia Commons. http://commons.wikimedia.org/wiki/File:Kruskal_diagram_of_Schwarzschild_chart.svg#/media.
- File:Kruskal_diagram_of_Schwarzschild_chart.svg, Accessed in 2017.
Figure 1.
The effect of a Hole in the Minkowski Manifold on Coordinates.
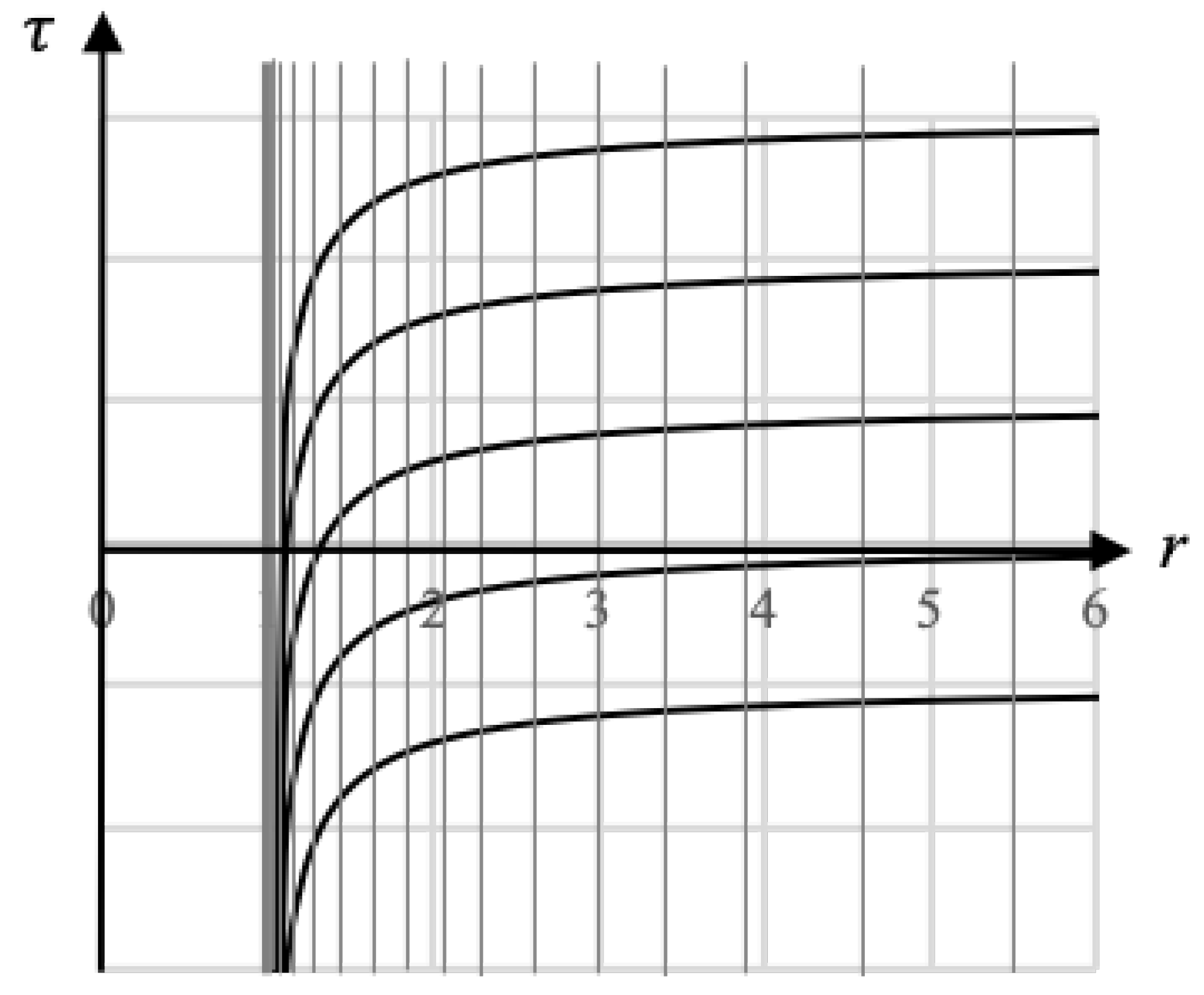
Figure 2.
s and t Basis Vectors Along a Line of Constant t
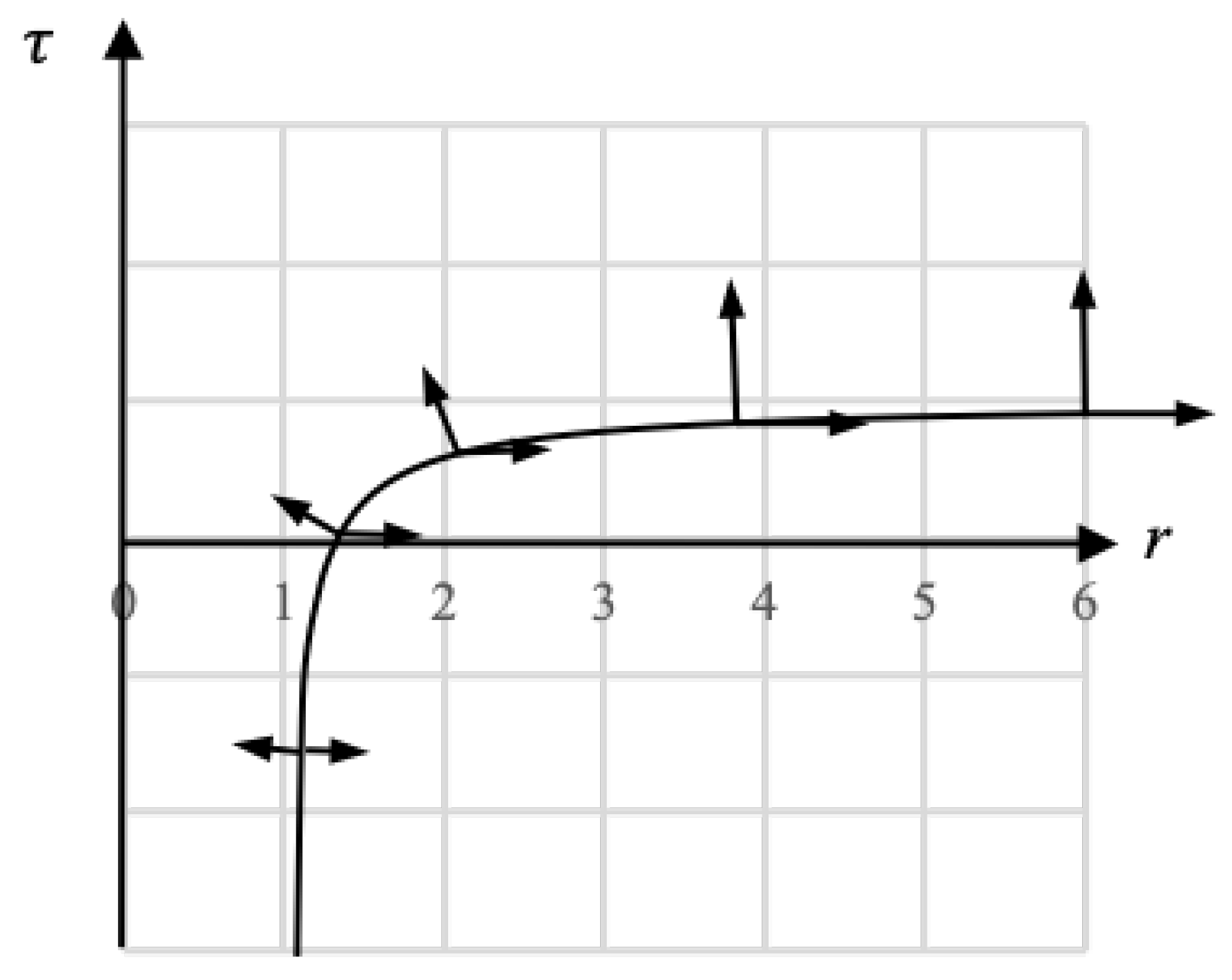
Figure 3.
Components of Vector During a Fall
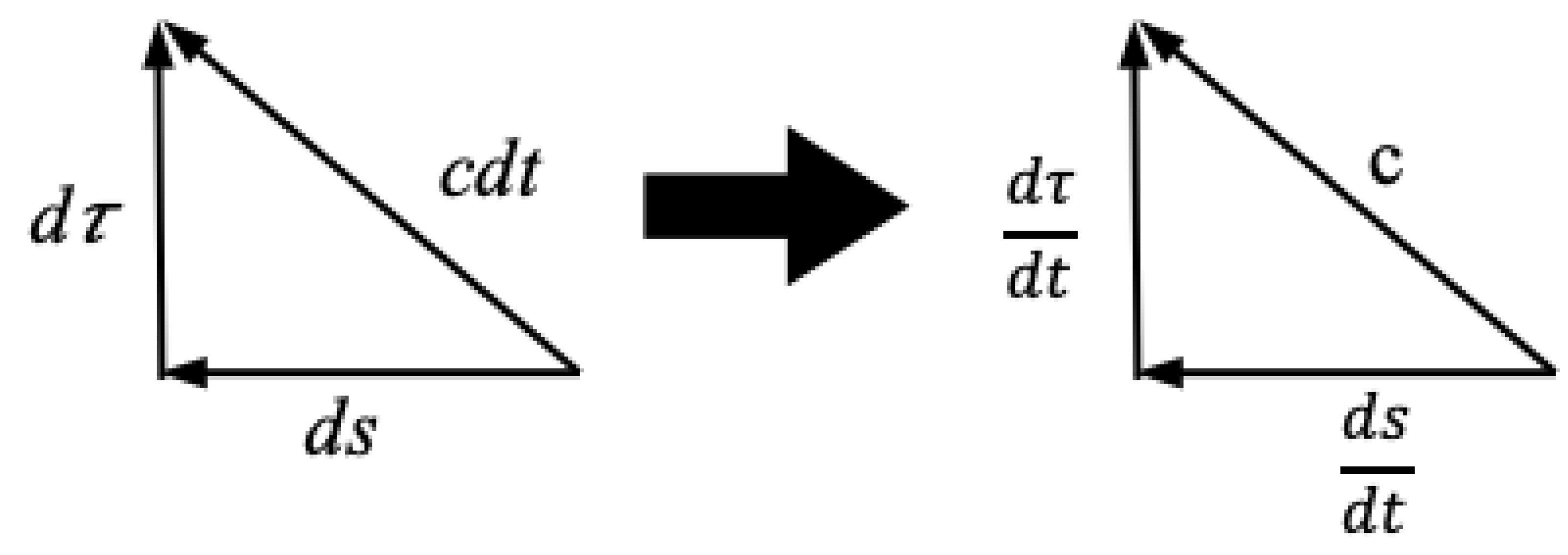
Figure 4.
Kruskal-Szekeres Coordinate Chart
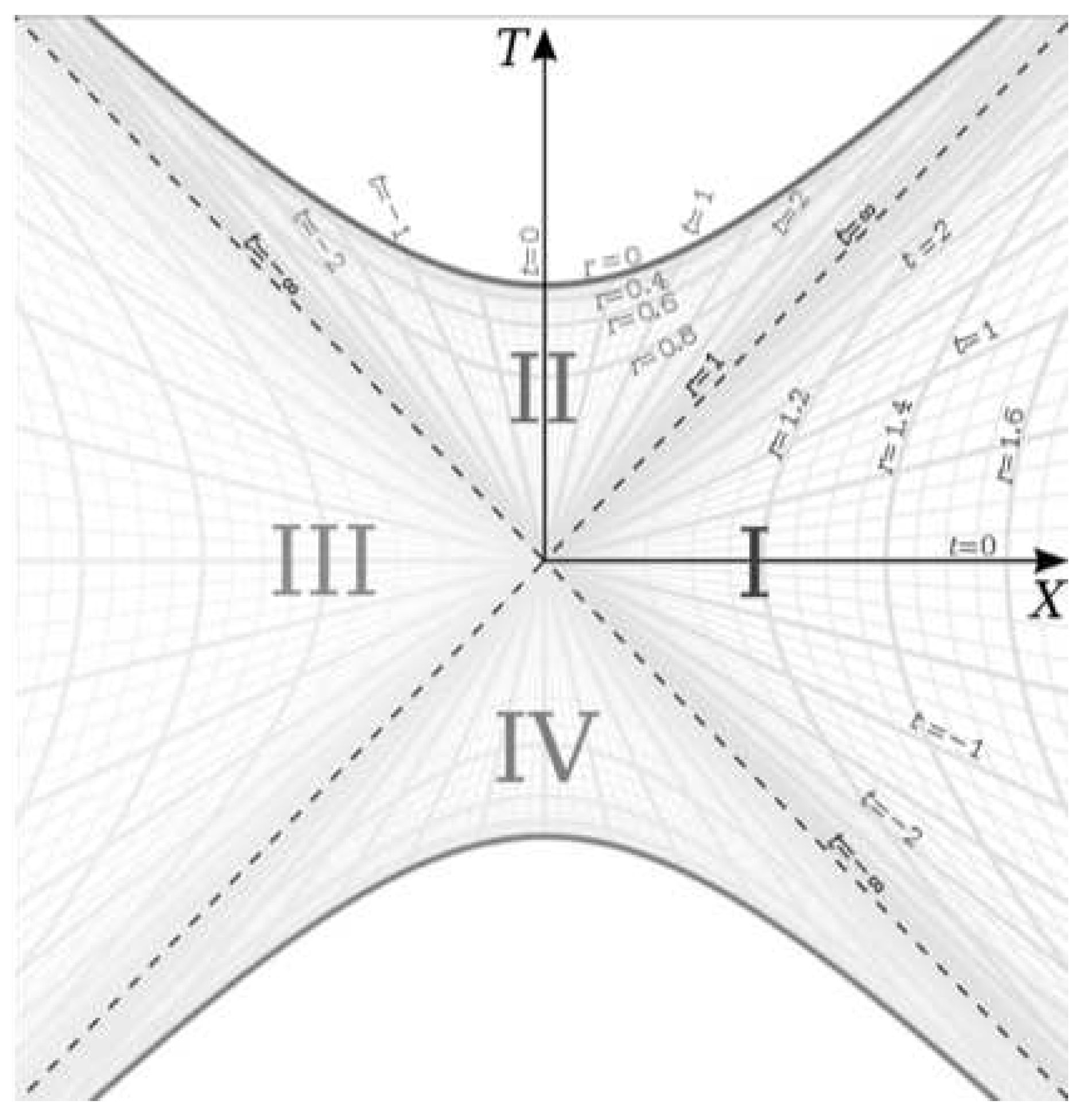
Figure 5.
Hyperbolic Rotation of a Worldline on the Kruskal-Szekeres Coordinate Chart
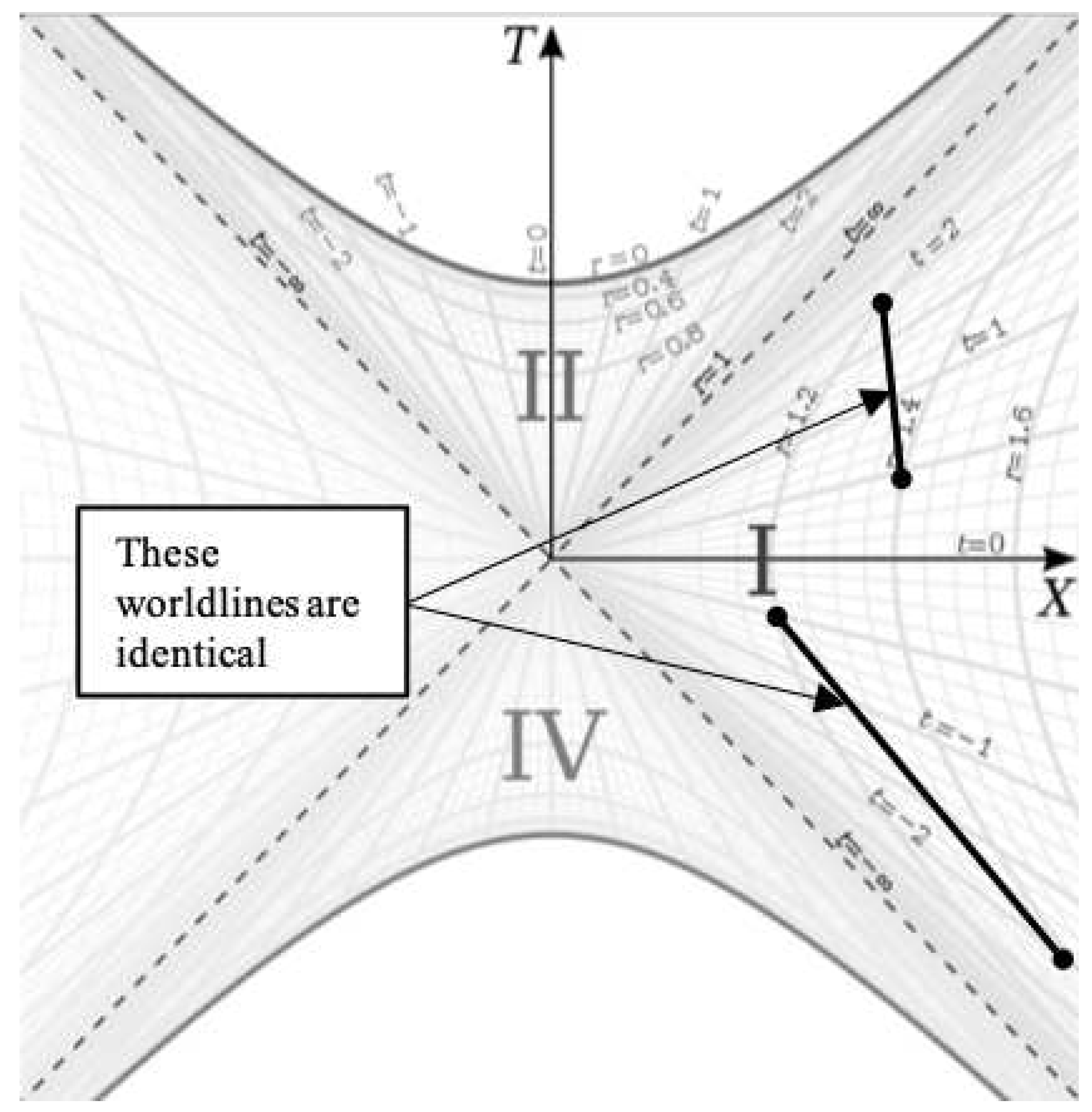
Figure 6.
Worldline of Falling Frame on the Kruskal-Szekeres Coordinate Chart with Continuous Hyperbolic Rotation
Figure 6.
Worldline of Falling Frame on the Kruskal-Szekeres Coordinate Chart with Continuous Hyperbolic Rotation
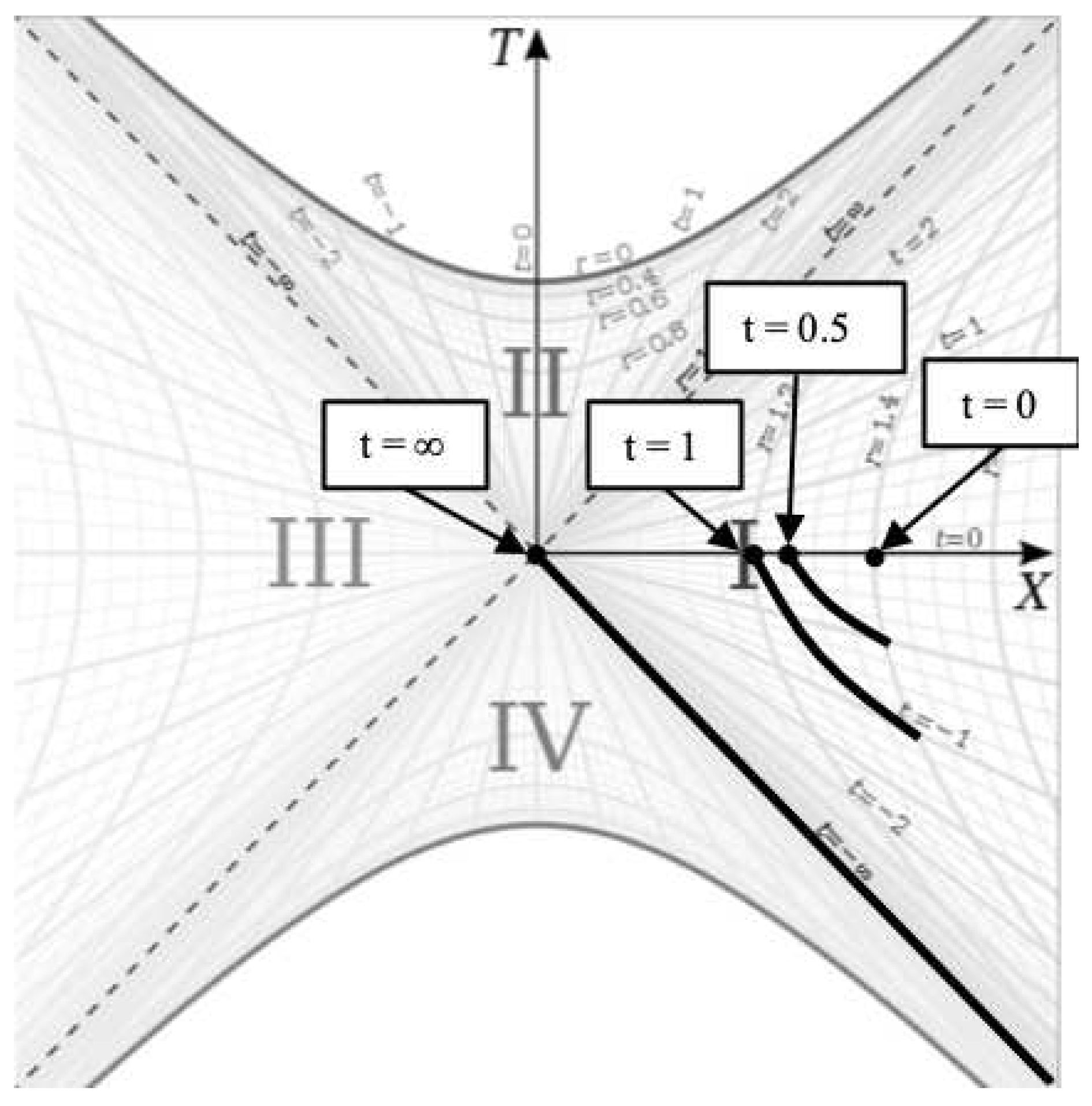
Figure 7.
Boosted Rest Frames in Kruskal-Szekeres Coordinates
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



