
Submitted:
20 December 2025
Posted:
22 December 2025
Read the latest preprint version here
Abstract
The need for simpler, yet accurate and physically sound, methods to predict the lift and pressure distributions over asymmetric delta wings, particularly at high angles of attack with attached shock wave, motivates the development of an alternative approach presented in this paper. By employing a geometric transformation and postulating a functional similarity between linear and nonlinear solutions, a straightforward algebraic technique for pressure estimation is developed. This approach bridges the solution in the central nonuniform flow region to the exact solutions in the uniform flow regions with attached shock waves near the leading edges, in a manner analogous to methods used for supersonic starting flow at high incidence. The method is shown to reproduce established results for both symmetric and yawed delta wings within a limited error. It yields a compact, explicit expression for the normal force coefficient, formulated as a weighted average of the pressure coefficients from the two uniform flow regions. A pathway for extending the approach to the upper surface, where the uniform flow is governed by swept Prandtl-Meyer relations is also outlined. Although classical analytical approaches for delta wings were established decades ago, the proposed method provides a tractable alternative tool for modern fast engineering analysis.
Keywords:
asymmetric delta wing
; geometric similarity
; pressure
; lift
; shock wave
1. Introduction
Linear solution for supersonic flow around delta wing has been obtained in the 1940-1950s. For instance, Jones (1946), based on slender-body assumptions, proposed a lift theory for low-aspect-ratio pointed wings, indicating that the spanwise loading distribution is elliptical and that lift varies little between subsonic and supersonic speeds. Stewart (1946) employed conical flow theory and conformal mapping to solve the lift problem of delta wings at supersonic speeds, providing an analytical expression for the lift-curve slope and distinguishing between cases where the leading edge lies inside or outside the Mach cone. Puckett (1946) used a source-distribution method to calculate the pressure coefficient of symmetric delta wings and obtained explicit formulas for the pressure coefficients in the two-dimensional and three-dimensional regions, and showed that the lift coefficient is equal to that of a two-dimensional wing, known from Ackeret (1925). Goodman (1949) introduced a method for determining pressure distributions by canceling excess lift, applicable to both conical and non-conical flow regions, illustrated with examples such as rectangular wing tips and clipped delta wings. Malvestuto et al. (1950), based on linearized supersonic-flow theory, derived the lift and damping-in-roll derivatives for sweptback wings with streamwise tips and provided design curves.
For the problem of supersonic/hypersonic flow with attached shock waves over the lower surface of delta wings, particularly under conditions of significant sweep angle and angle of attack where linear theory fails, several theoretical approaches have been developed. These methods crucially employ the exact oblique shock relations to define the uniform flow near the leading edges (Babaev, 1963). The central non-uniform flow region is then addressed using distinct methodologies: the thin shock-layer approximation, which leads to solutions constructed from discontinuous shock slopes (Messiter, 1963; Woods and McIntosh, 1977); the method of integral relations, which reduces the governing equations to ordinary differential equations (Akinrelere, 1970); and a unified perturbation theory that applies a linearized analysis on a nonlinear base flow and uses a strained coordinate technique for matching (Hui, 1971). Hui (1973) also extended the unified perturbation theory to yawed symmetric wings.
All these approaches fundamentally rely on the application of the shock relations to properly account for the three-dimensional, nonlinear effects of sweep and incidence. Roe (1972) derived an exact expression for the spanwise pressure gradient at the boundary between the uniform and non-uniform flow regions beneath a supersonic delta wing with an attached shock Fowell (1956) considered both lower and upper surfaces of a delta wing, and his analysis revealed the existence of a critical angle of attack on the expansion surface, beyond which the flow becomes discontinuous, forming a shock structure. The flow past the upper surface of the wing was also investigated by Babaev (1962). Since Bluford (1979), effect of viscosity can be accounted using numerical simulation (1979). In the NASA technical paper by Wood (1988), the aerodynamic characteristics of delta wings at lifting conditions were evaluated for the effects of wing leading-edge sweep, leading-edge bluntness, and wing thickness and camber and then summarized in the form of graphs.
For the flow over delta wings at high angles of attack, the theoretical prediction of surface pressure under asymmetric conditions—whether induced by geometric dissimilarity between the left and right leading edges or by a yawed inflow—presents a significant challenge beyond the scope of classical linear theory. Early nonlinear analyses, such as the unified perturbation theory developed by Hui for yawed symmetric wings (Hui, 1973), provided a rigorous theoretical framework capable of handling the coupled effects of sweep and incidence across supersonic and hypersonic regimes. In his work, the asymmetry originates from the yaw angle of the oncoming stream, and the solution is constructed through a sophisticated perturbation approach combined with the method of strained coordinates to match the non-uniform central flow with the exact uniform flows near the leading edges. While theoretically comprehensive, such methods often result in solutions that are implicit or require considerable computational effort for evaluation, limiting their immediate utility for rapid engineering estimation.
Engineering application usually requires simpler, yet accurate and physically sound methods for predicting the lift and pressure distributions over asymmetric delta wings, particularly at high angles of attack.
Motivated by the need for a simpler yet physically sound predictive tool, this paper proposes a geometric transformation approach for asymmetric delta wings with dissimilar sweep angles and with supersonic upstream flow at a Mach number such that there is an attached shock wave and there are two uniform two-dimensional flow regions enclosing a three-dimensional nonuniform flow region in the middle. The geometric transformation has been used by Bai & Wu (2017) for extension of the linear solution of Heaslet & Lomax (1948) to nonlinear case in application of supersonic starting flow at high angle of attack. The problem treated in this paper is different from Bai & Wu (2017) so the geometric transformation has to be reformulated in a form suited to the problem.
The idea is to transform the linear solution, like that given by Puckett (1946, eq.35) for symmetric delta wing, of asymmetrical delta wing, originally expressed in terms of the spanwise coordinate (z) into a geometrically invariant form, and then replace the pressures coefficients pertinent to the two-dimensional uniform flow region by the attached shock solution. This way gives a very simple formula, physcially releveant formula for both two-dimensional and three-dimensional regions over the asymmetrical delta wing.
The linear pressure expression for asymmetric delta wing is provided in section 2. The nonlinear extension by geometric transformation is given in section 3. Section 4 is for comparison with exact solutions, for both symmetric delta wing and asymmetric delta wing. Section 3 and 4 treat the lower surface. Section 4 gives the approximate expression for the normal force coefficient. Appendix A provides a possible method to extend the present result to the upper surface of asymmetric delta wing.
2. Linear Solution for Asymmetric Delta Wing
2.1. Asymmetric Delta Wing Configuration
Consider an asymmetric delta wing with different sweep angles and on the left and right sides, respectively. The freestream Mach number is and the angle of attack is (small angle assumption). See Figure 1 for a schematic display.
The two leading edges, OA and OB, are defined by
Supersonic leading edge conditions are assumed, so
As usual, define and
The flow region is divided into a two-dimensional flow region near each leading edge, and a three dimensional flow region. The boundaries between two-dimensional and three-dimensional regions, OC and OD, are defined by the Mach lines
2.2. Pressure Coefficient Expression
The linear pressure expression can be obtained using the linear supersonic flow theory proposed by Puckett, (1946). Here we outline the results. The pressure coefficient at point on the wing surface is given by
where is the upstream region bounded by the Mach cone from P and the two wing leading edges. It can be shown that
where
and is the triangular region formed by points O, R and Q, where Q is the intersection of the left leading edge and the extended line of PR.
Using the transformation , , and introducing characteristic coordinates, the integral becomes:
where
Taking the partial derivative with respect to x yields:
For the left 2D region ( and ), we have
For the right 2D region ( and ), we have
For the Three-dimensional region (): we have with
For a symmetric delta wing, and . Then we recover the well-known results of Puckett (1946)
3. Nonlinear Approximation by Geometric Transformation
3.1. Geometrical Relations
In nonlinear case, the shock wave depends not on the upstream Mach number, but also on the angle of attack and the leading edge sweep angle. There are two equivalent ways to define the angle of attack and the sweep angle, as shown in Figure 2 and Figure 3.
The configuration shown in Figure 2 was adopted by some authors like Babaev (1963) and Hui (1971). Here, the free stream velocity passing throgh the apex (o) lies on the same plane of the x axis. The y axis is perpendicular to the wing, and z axis is along the span. The wing is on the plane with . The angle of attack is the angle between the free stream and the x axis. The sweep is defined as the sweep in the wing surface, i.e., in plane, thus the sweep angle is defined as the angle between the leading edge and the spanwise axis (z).
In the present case, the left leading edge sweep angle is different from the right leading edge sweep angle . Now consider the left leading edge.
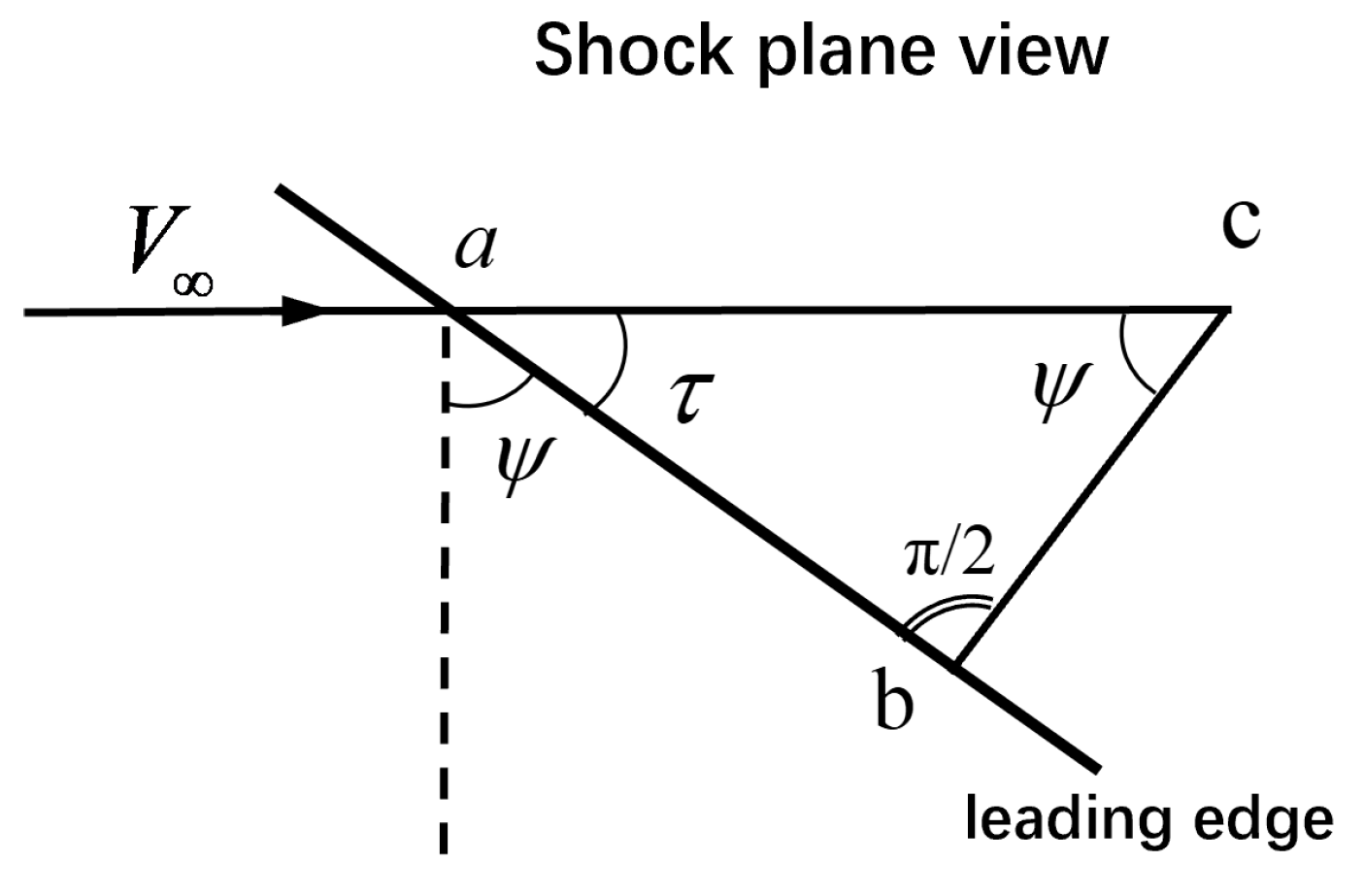
Emanuel (2000) and Domel (2016) considered the shock wave produced by an infinite span sweep wing. The sweep angle is defined as the the sweep in the shock plane as shown in Figure 3, so
and the angle of attack is defined in the plane normal to the leading edge, so
according to Babaev (1963) and Hui (1971).
The angle between the free stream velocity and the leading edge is denoted as . According to Hui (1971),
3.2. Shock Solution in the Two-Dimensional or Uniform Region
Numerous authors have given the expressions for shock solutions accouting for the swept angle effect of the leading edge (e.g. Babaev 1963; Akinrelere 1970; Hui, 1971; Emanuel 2000;Threadgill & Little 2020). As noted by Hui (1971), the flow field on the lower surface of a delta wing consists of uniform flow regions near the leading edges, where the cross flow is supersonic and a nonuniform flow region near the central part. Now we provide the shock expressions for the uniform region.
The Domel’s 3-D theta-beta–Mach-sweep () shock relations are written in a form very similar to the two-dimensional counterpart and easy to use here. As commented by Threadgill & Little (2020), Domel (2016)’s theta-beta–Mach-sweep shock relations have been derived for infinite-span swept oblique inviscid shock. However, the uniform flow region of the delta wing can be described by the infinite-span swept oblique shock relations.
Note that the sweep angle and the angle of attack in the Domel’s definitions are related to those in the definitions of Babaev (1963) and Hui (1971) by (5) and (6).
Domel discovered the existence of an effective 2-D plane that can be obtained by rotation of his y plane (this y is the axis normal to the shock surface) by a tilt angle () and on this effective plane he introduced the effective deflection angle and the effective shock angle . First, the effective shock angle is solved by
and then the effective deflection angle is solved by
Once is obtained by (7) and is obtained by (8), the Mach number M, the pressure p and the density downstream of the shock wave are computed by
Using (10), the pressure coefficient is
3.3. Geometric Transformation
To extend the linear expression to nonlinear cases directly, we need a geometrical transformation. Bai & Wu (2017) proposed such a method when extending the Heaslet & Lomax (1948) linear solution for starting flow at small angle of attack to nonlinear case at large angle of attack. This geometric transformation is used to make the linear expression in a form that is invariant to frame rotation. First we rewrite (4) as
where is given by (2), is given by (3).
The positions of the left boundary and right boundaries of the wing are denoted as
The positions of the left boundary and right boundaries of the Mach cone from the apex (O) are denoted as
3.4. Nonlinear Solution for the Three Dimensional Region
In the nonlinear case, the left and right boundaries of the wing are still given by (14), the left and right boundaries of the Mach cone, or the edges between the two-dimensional regions and three dimensional region, are no longer given by (15), but are given by
where and , is the Mach numbers in the left two dimensional flow region downstream the shock wave, and is the Mach numbers in the right two dimensional flow region downstream the shock wave.
The parameters , and are still determined by (16), (17) and (18), with and determined by (20). The pressure coefficients and , along with and , are replaced by the nonlinear solution to be given in sections 3.2.
The pressure coefficient in the 3D region is postulated to have the same form as (13), i.e.
where is given by (16), by (17), by (18).
The minimum value of is found to be
4. Comparison with Exact Method
4.1. Symmetric Delta Wing
Babaev (1963), Kutler & Lomax (1971), Bluford (1979), Woods & McIntosh (1977), Roe (1972) and Woods (1988) provided various cases which can be used to check the approximate yet very simple method provided above.
Table 1 displays computed by (7), by (8), M by (9) and by (12). Consider for instance case 1, Babaev (1963) and Hui (1971) gives which is the same as given by Domel’s shock expressions.

Table 1.
Shock solution for four cases
| Case | (Domel) | M | (Domel) | |||
|---|---|---|---|---|---|---|
| 1 | 4.0 | 2.874 | ||||
| 2 | 5.08 | 3.613 | ||||
| 4 | 4 | 2.795 | ||||
| 5 | 6 | 3.207 |
We check whether the formula (20) predicts correctly the boundaries between the two-dimensional regions and the three-dimensional region, for symmetric case as shown in Table 1. In symmeric case, we consider just the right boundary defined by
where , with M given by (9). The value is from Babaev (1963) for case 1, Woods & McIntosh (1977) for case 2 and 3, from Babaev (1963) (see also Roe 1972) for case 3, from Babaev (1963) and Squire (1968) for case 4 ( is from Babaev 1963 and is from Squire 1968). The relative difference is also shown in Table 2. Thus, there is some discrepancy between predicted by (23) and provided by various previous works.
Table 2.
Boundary between 2d and 3d regions for four cases shown in Table 1
| Case | M | ||||
|---|---|---|---|---|---|
| 1 | 2.874 | 0.442 | |||
| 2 | 3.613 | 0.343 | |||
| 3 | 2.795 | 0.458 | |||
| 4 | 3.207 | 0.391 |
Now we check whether the formula (22) for derived from the very simple formula (21) can predict the previous results for test cases shown in Table 1. In symmetric case, (22) reduces to
where is given by (12), and .
The results are shown in Table 3, where is from Babaev (1963) for case 1, Woods & McIntosh (1977) for case 2, from Babaev (1963) (see also Roe 1972) for case 3, from Babaev (1963) and Squire (1968) for case 4 ( is from Babaev 1963 and is from Squire 1968). The relative difference is also shown in Table 1. Thus, the very simple and easy to use formula (21) can predict the minimum pressure coefficient within a difference at most compared to very complex accurate results.
Table 3.
Minimum pressure coefficients for four cases shown in Table 1
| Case | ||||
|---|---|---|---|---|
| 1 | 0.184 | |||
| 2 | 0.155 | |||
| 3 | 0.201 | |||
| 4 | 0.276 |
4.2. Yawed Delta Wing
Hui (1973) extended his method for symmetric delta wing (Hui 1971) to the case with yawed delta wing. He provided results that correspond to asymmetric delta wing considered in this paper.
His high angle of attack results are used here for comparison. For and , he considered yawed delta wing which has and . For and , he considered yawed delta wing which has and . He showed the pressure distribition in their Figure 5 and 6 (we have checked that the conditions marked in their Figure 5 and 6 should be exchanged).
For comparison we use the Domel’s expression for and and the formula (22) for . The comparison is displayed in Table 4, where , and are from Figure 5 and 6 of Hui (1973).
Table 4.
Comparison with the results of Hui (1973).
| Case | ||||||
|---|---|---|---|---|---|---|
| 1 | 0.241,0.276 | 0.241,0.278 | 0.203 | |||
| 2 | 0.0869,0.106 | 0.072 |
The pressure distribution of Hui (1973) indicates that the minimum occurs at or . To see whether the present method can predicts this, we consider and for various . Using Domel’s method, we get and (see Table 1). The asymmetry of the position of can be measured with
where is the middle of the three-dimensional region defined by (19). In the symmetrical case, , so the magnitude of characterize asymmetry of the three-dimensional region.
Table 5 displays , ,, , and for several choices , including the symmetric case . The parameters and are computed by (16) and (17), with and determined by (20), i.e.
The parameter is computed by (24), is computed with the Domel’s formula (12) for , and is computed by the present approximate method (22).
Table 5.
Typical flow parameters for various sweep angle on the right leading edge
| Case | ||||||
|---|---|---|---|---|---|---|
| 1 | 2.8736 | 0.2597 | 0.0000 | 0.1840 | ||
| 2 | 2.8605 | 0.2643 | 0.1822 | |||
| 3 | 2.8418 | 0.2709 | 0.1805 | |||
| 4 | 2.8117 | 0.2817 | 0.1791 | |||
| 5 | 2.7410 | 0.3077 | 0.1795 |
We see that asymmetry parameter is negative, meaning that the middle line of the three dimensional region is one the side with larger sweep angle. The minimum pressure coefficient decreases with increasing . In all cases, the magnitude of is very small, showing that the asymmetry of the delta wing does not change significantly the middle of the three dimensional region.
5. Lift or Normal Coefficient for Asymmetric Delta Wings
The lift is normal to the incoming flow direction, so the lift coefficient where is the normal force coefficient. Here we show that the normal force coefficient due to the pressure of the lower surface of an asymmetric delta wing at high angles of attack can be expressed as a weighted average of the pressure coefficients in the two uniform flow regions near the left and right leading edges. The derivation of the normal force coefficient will be shortly outlined in the end of this section. Before that we state the final expression.
The compact formula for is given by
where () are the pressure coefficients in the two-dimensional uniform flow regions (given by shock relations in section 3.2), and the weights are defined as
Here, are the sweep angles of the left () and right () leading edges, are the Mach angles downstream of the shock in the respective uniform flow regions, are the post-shock Mach numbers, and . The function is given by
For a symmetric delta wing with , we have , , , and . The weights simplify to , and Eq. (25) reduces to
In the linear limit (small angle of attack and small disturbances), the shock relations simplify to the linear pressure coefficient , where . Substituting this into Eq. (29) yields
This is exactly one-half of the lift coefficient given by Puckett (1946) for a symmetric delta wing (which includes both upper and lower surfaces). Puckett’s result for the entire wing is ; thus, the present formula correctly recovers the lower-surface contribution in the linear symmetric limit.
The derivation begins with the pressure distribution on the lower surface of an asymmetric delta wing. The pressure coefficient in the three-dimensional region is postulated to have the same functional form as the linear solution, but with the two-dimensional pressure coefficients replaced by their nonlinear counterparts and the geometric parameters reinterpreted using post-shock flow angles. Specifically,
where and is a normalized spanwise coordinate.
The normal force coefficient is obtained by integrating the pressure over the wing surface:
where S is the wing planform area. The integration is performed separately in the two-dimensional regions (where is constant) and the three-dimensional region (where is given by the expression above). After some algebra, the integral over the three-dimensional region can be expressed in terms of the function defined in Eq. (28). Combining the contributions from all regions and simplifying yields the compact weighted-average form of Eqs. (25)–(27).
The key steps involve:
- Expressing the boundaries of the two-dimensional and three-dimensional regions using post-shock Mach angles .
- Transforming the integration variables to and using the geometric relations .
- Evaluating the integral to obtain .
The final formula is explicit and requires only the two-dimensional pressure coefficients and the geometric/flow parameters and , which are determined from the shock relations.
6. Conclusions
This paper presents an approximate analytical method based on a geometric transformation for predicting the pressure load on an asymmetric delta wing with attached shock waves at high angles of attack. By reformulating the linear solution into a geometrically invariant form and replacing the pressure coefficients in the two-dimensional regions with those given by shock relations, a simple, algebraic-type formula with clear physical meaning is derived. The core idea is to use this geometric transformation as a bridge connecting the nonlinear flow problem to known linear solutions, in a manner analogous to that used in studies of supersonic starting flow at large incidence. The normal force coefficient is also obtained.
The method is shown to agree well with existing reference solutions. For asymmetric (yawed) wings, its predictions show good agreement with the more complex perturbation results of Hui (1973). Specifically, the maximum discrepancy between the minimum pressure coefficient predicted by the present formula and the referenced accurate solutions is within 11%. Furthermore, a compact weighted-average expression for the normal force coefficient on the lower surface is derived, which naturally reduces to the classical linear theory result in the small-angle-of-attack limit.
The primary significance of this method lies in providing a simple, explicit, and physically transparent tool for rapid engineering estimation, particularly useful for the preliminary aerodynamic analysis of asymmetric delta wings at high angles of attack. It avoids the considerable computational effort typically required by sophisticated perturbation theories or numerical simulations.
It must be emphasized that the present method has the following limitations. The flow is assumed inviscid. It is approximated for the three-dimensional flow region. The current formulation primarily addresses the lower surface. Extension to the upper surface—which involves more complex three-dimensional expansion waves and possible inboard shocks—requires further treatment of intricate wave interactions.
Nevertheless, its advantages are the formula’s simplicity, computational efficiency, and the retention of a clear physical picture, making it suitable for the fast evaluation of aerodynamic characteristics during the conceptual design phase.
In the present paper, we have not considered the upper surface, where there is expansion wave. The possible way to extend the present method to the upper surface is shortly discussed in Appendix A.
Appendix A Possible extension for the Upper Surface
Despite the linear solution shares the same form on both lower and upper surface, the nonlinear solution on the upper surface is far more complex than on the lower surface. Babaev (1962) pointed out that apart from a three-dimensional Prandtl-Meyer expansion wave, there is also an inboard shock The reason is that, the streams from two halves of the wing having velocity components equal in magnitude but opposite in direction tend to meet on the plane of symmetry of the wing, and a shockwave must arise, on crossing which and behind which the stream changes to a direction parallel to the root chord. Even for the Prandtl-Meyer expansion wave, a numerical integration of the characteristic equation is required to find the flow properties in the uniform flow region. Fowell (1956) studied a plane delta wing with supersonic leading edges, an exact analysis based upon the equations for inviscid flow with constant stagnation enthalpy showed the existence of two cases in the solution of the flow over the expansion surface; below a critical angle of attack a continuous solution can exist while above this angle the solution must be discontinuous.
Using three dimensional method of characteristics, Beeman & Powers (1969) identified four regions of flow on the upper surface. Kutler & Lomax (1971) used computational fluid dynamics to study high angle of attack flow around a delta wing, and noted that Babaev fails to predict the correct values of the flow quantities in the region of uniform flow adjacent to the wing surface and between the inboard shock wave and the wing leading edge..
Bannink & Nebbeling (1973) experimentaly studied the flow around a delta wing, and arrived at the conclusion that the inviscid flowfield at the expansion side of the delta wing appears to be conical and suggested that the inboardshock wave ends with zero strength in the point where the conical sonic line starts.
Neglecting the effect of inboard shock, the present method can be extended to the upper surface in the following way.
First determine the Mach number M and pressure coefficients in the two-dimensional uniform region using the Prandtl-Meyer solution of Vahrenkamp (1992) with sweep (), angle of attack () and upstream Mach number () in his M.S. thesis (section 10.3 of Emanuel 2000). This is done for the two-dimensional region along each side of the delta wing, with different sweep angles and
Then, compute the boundaries of the three-dimensional regions by (20), where and , is the Mach numbers in the left two dimensional flow region downstream the Prandtl-Meyer wave, and is the Mach numbers in the right two dimensional flow region downstream the Prandtl Meyer wave.
The pressure coefficient in the three-dimensional region is computed by (21), in the same way as for the lower surface, except that the pressure coefficients are given by the Vahrenkamp’s expression.
Finally, the normal force coefficient due to upper surface is computed by (25), in the same way as for the lower surface, except that , and the pressure coefficients are based on the Vahrenkamp’s expression.
References
- Ackeret, J. Air Forces on Airfoils Moving Faster than Sound. In Zeitschrift fur Flugtechnik und Motorluftschiffahrt English trans. as NACA Technical Memorandum No. 317, 1935; 1925; pp. 72–74. [Google Scholar]
- Akinrelere, E. A. The calculation of inviscid hypersonic flow past the lower surface of a delta wing. J. Fluid Mech. 1970, 44, 113–127. [Google Scholar] [CrossRef]
- Babaev, D. A. Numerical solution of the problem of supersonic flow past the upper surface of a delta wing. Zhur. Vychisli Tel’noi Mat. I Mat. Fiz. (J. Comput. Math, Mathemat. Phys.) 1962, 2, 278–289. [Google Scholar]
- Babaev, D. A. Numerical solution of the problem of supersonic flow past the lower surface of a delta wing. AIAA J. 1963, 1, 2224–2231. [Google Scholar] [CrossRef]
- Bai, C. Y.; Wu, Z. N. Supersonic indicial response with nonlinear corrections by shock and rarefaction waves. AIAA Journal 2017, 55, 884–892. [Google Scholar] [CrossRef]
- Bannink, W. J.; Nebbeling, C. Investigation of the expansion side of a delta wing at supersonic speed. AIAA J. 1973, 11, 1151–1156. [Google Scholar] [CrossRef]
- Beeman, E.; Powers, S. A method for determining the complete flow field around conical wings at supersonic/hypersonic speeds. Paper presented at AIAA Fluid and Plasma Dynamics Conference, San Francisco, California, June 16–18, 1969; 1969. [Google Scholar]
- Bluford, G. S. Numerical Solution of the Supersonic and Hypersonic Viscous Flow around Thin Delta Wings. AIAA J. 1979, 17, 942–949. [Google Scholar] [CrossRef]
- Domel, N. D. General three-dimensional relation for oblique shocks on swept ramps. AIAA J. 2016, 54, 310–319. [Google Scholar] [CrossRef]
- Emanuel, G. Analytical Fluid Dynamics, 2nd ed.; CRC Press, 2000. [Google Scholar]
- Fowell, L. R. Exact and Approximate Solutions for the Supersonic Delta Wing. J. Aeronaut. Sci. 1956, 23, 709–720. [Google Scholar] [CrossRef]
- Goodman, T. R. The lift distribution on conical and non-conical flow regions of thin finite wings in a supersonic stream. J. Aeronaut. Sci. 1949, 16, 365–374. [Google Scholar] [CrossRef]
- Heaslet, M. A.; Lomax, H. also NACA TN-1621; Two-Dimensional Unsteady Lift Problems in Supersonic Flight. Archiveand Image Library TR 945 Washington: D.C., 1948.
- Hui, W. H. Supersonic and hypersonic flow with attached shock waves over delta wings. Proc. R. Soc. London. Ser. A 1971, 325, 251–268. [Google Scholar]
- Hui, W. H. Effect of yaw on supersonic and hypersonic flow over delta wings. Aeronaut. J. 1973, 77, 299–301. [Google Scholar] [CrossRef]
- Jones, R. T. Properties of Low-Aspect-Ratio Pointed Wings at Speeds Below and Above the Speed of Sound. NACA Report 835, 1946. [Google Scholar]
- Kutler, P.; Lomax, H. Shock-capturing, finite-difference approach to supersonic flows. J. Spacecr. Rocket. 1971, 8, 1179–1182. [Google Scholar] [CrossRef]
- Malvestuto, F. S., Jr.; Margolis, K.; Reiner, H. S. Theoretical lift and damping in roll at supersonic speeds of thin sweptback tapered wings with streamwise tips, subsonic leading edges, and supersonic trailing edges. NACA Report 970, 1950. [Google Scholar]
- Messiter, A. F. Lift of slender delta wings according to Newtonian theory. AIAA J. 1963, 1, 794–802. [Google Scholar] [CrossRef]
- Puckett, A. E. Supersonic Wave Drag of Thin Airfoils. J. Aeronaut. Sci. 1946, 13, 475–484. [Google Scholar] [CrossRef]
- Roe, P. L. A result concerning the supersonic flow below a plane delta wing (CP No. 1228); Her Majesty’s Stationery Office: London, 1972. [Google Scholar]
- Squire, L. C. Calculated pressure distributions and shock shapes on conical wings with attached shock waves. Aeronaut. Q. 1968, 19, 31–50. [Google Scholar] [CrossRef]
- Stewart, H. J. The lift of a delta wing at supersonic speeds. Q. Appl. Math. 1946, 4, 246–254. [Google Scholar] [CrossRef]
- Threadgill, J. A. S.; Little, J. C. An inviscid analysis of swept oblique shock reflections. Journal of Fluid Mechanics 2020, 890, A22. [Google Scholar] [CrossRef]
- Vahrenkamp, M. Prandtl–Meyer Flow with Sweep. M.S. thesis, University of Oklahoma, 1992. [Google Scholar]
- Wood, R. M. Supersonic Aerodynamics of Delta Wings. NASA TP-2771, 1988.
- Woods, B. A.; McIntosh, C. B. G. Hypersonic flow with attached shock waves over plane delta wings. J. Fluid Mech. 1977, 79, 361–377. [Google Scholar] [CrossRef]
Figure 1.
Schematic display of a delta wing. The coordinate system is defined with x along the chordwise direction, z along the spanwise direction, and y normal to the wing surface.
Figure 1.
Schematic display of a delta wing. The coordinate system is defined with x along the chordwise direction, z along the spanwise direction, and y normal to the wing surface.
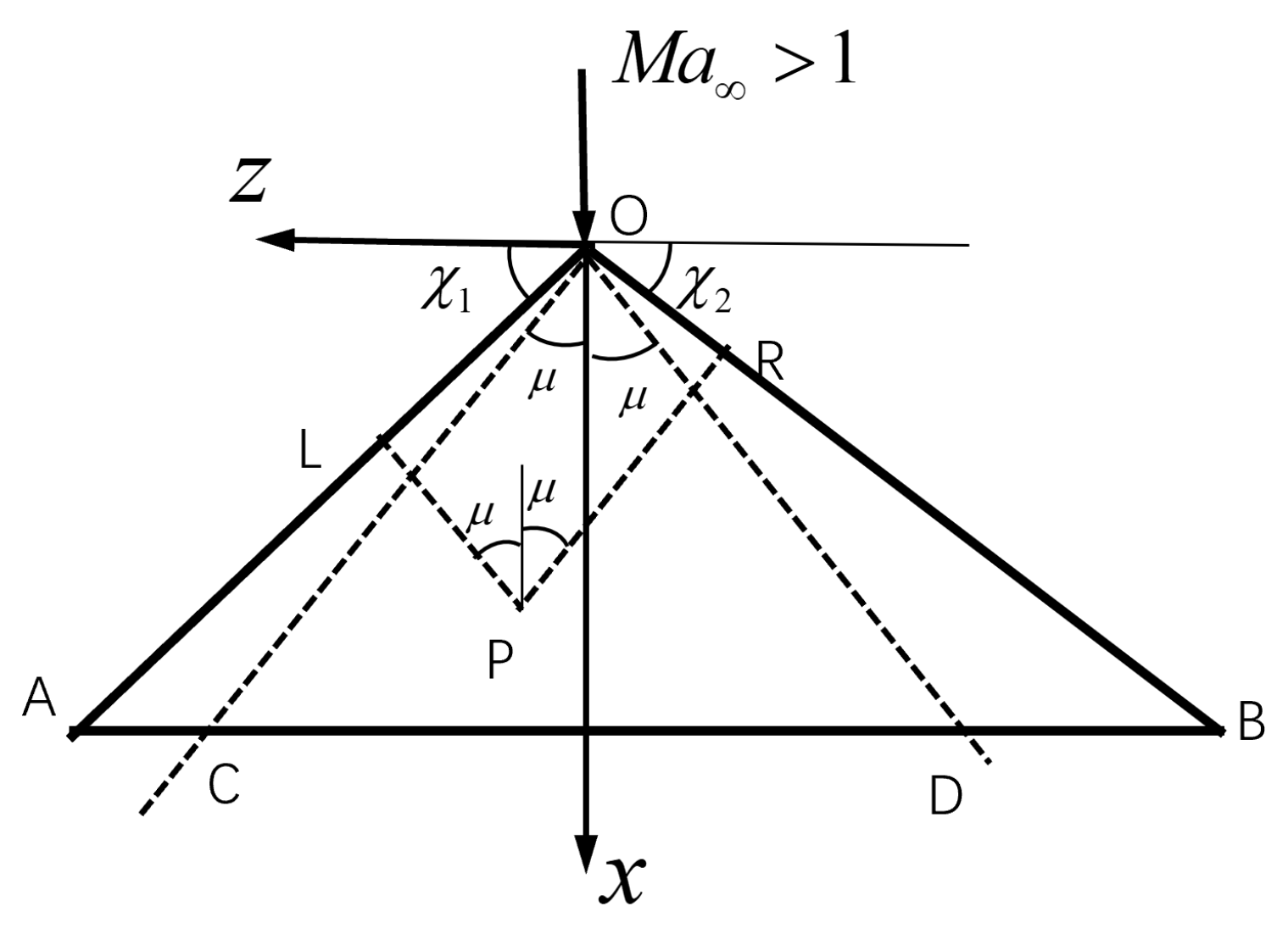
Figure 2.
Schematic display of a delta wing at high angle of attack (following Babaev 1963). The coordinate system is defined with x along the chordwise direction, z along the spanwise direction, and y normal to the wing surface.
Figure 2.
Schematic display of a delta wing at high angle of attack (following Babaev 1963). The coordinate system is defined with x along the chordwise direction, z along the spanwise direction, and y normal to the wing surface.
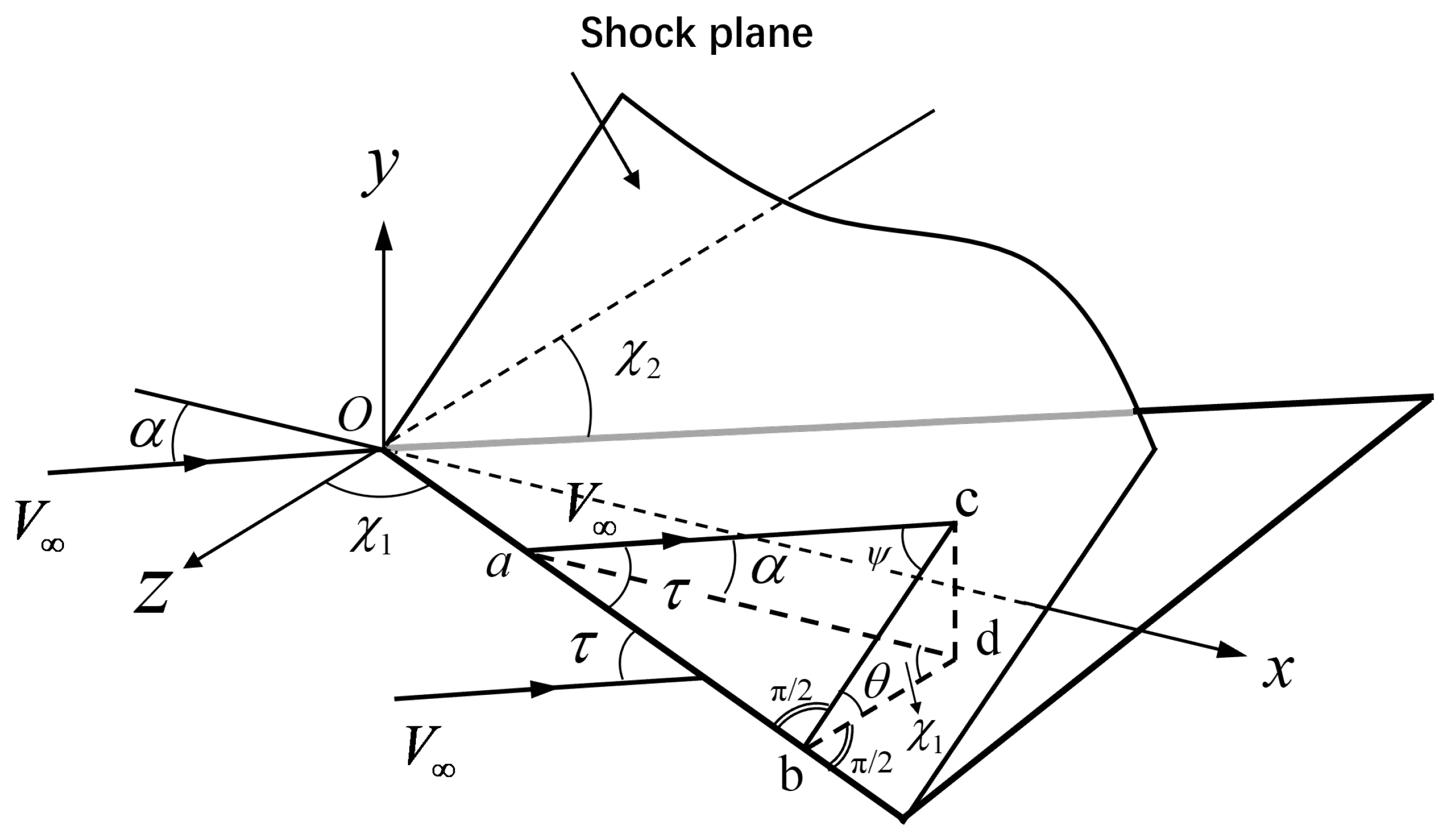
Figure 3.
Top view from the top of the shock surface.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



