Submitted:
18 December 2025
Posted:
19 December 2025
You are already at the latest version
Abstract
This paper presents a method for describing the differential equations of motion of mechanical systems using the Kuznetsov tensor. Traditional approaches to solving equations of motion rely on vector and matrix methods, but the proposed approach allows for significant simplification and generalization of problems by using a system state tensor. The paper discusses the main principles of working with the Kuznetsov tensor, which describes the evolution of the system in a unified context. Specifically, it outlines a method for integrating the equations of motion for various mechanical systems, such as oscillations in a two-mass spring system. Conditions for damping oscillations and controlling amplitude are also considered, expanding the applicability of the Kuznetsov tensor in engineering calculations. The advantages of the proposed approach include a more compact representation of the system of equations, ease of analyzing invariants and symmetries, and the ability to apply the method to multi-linked and multi-component systems. The use of the Kuznetsov tensor for modeling the dynamics of various systems represents a step toward a more universal approach in mechanics and engineering.
Keywords:
1. Introduction
2. Investigation and Discussion:
Physical Status of the Kuznetsov Tensor

 such that for solutions K(t):
such that for solutions K(t):

3. Theorems
- Momentum P
- Angular momentum L
- Total energy E=T+V
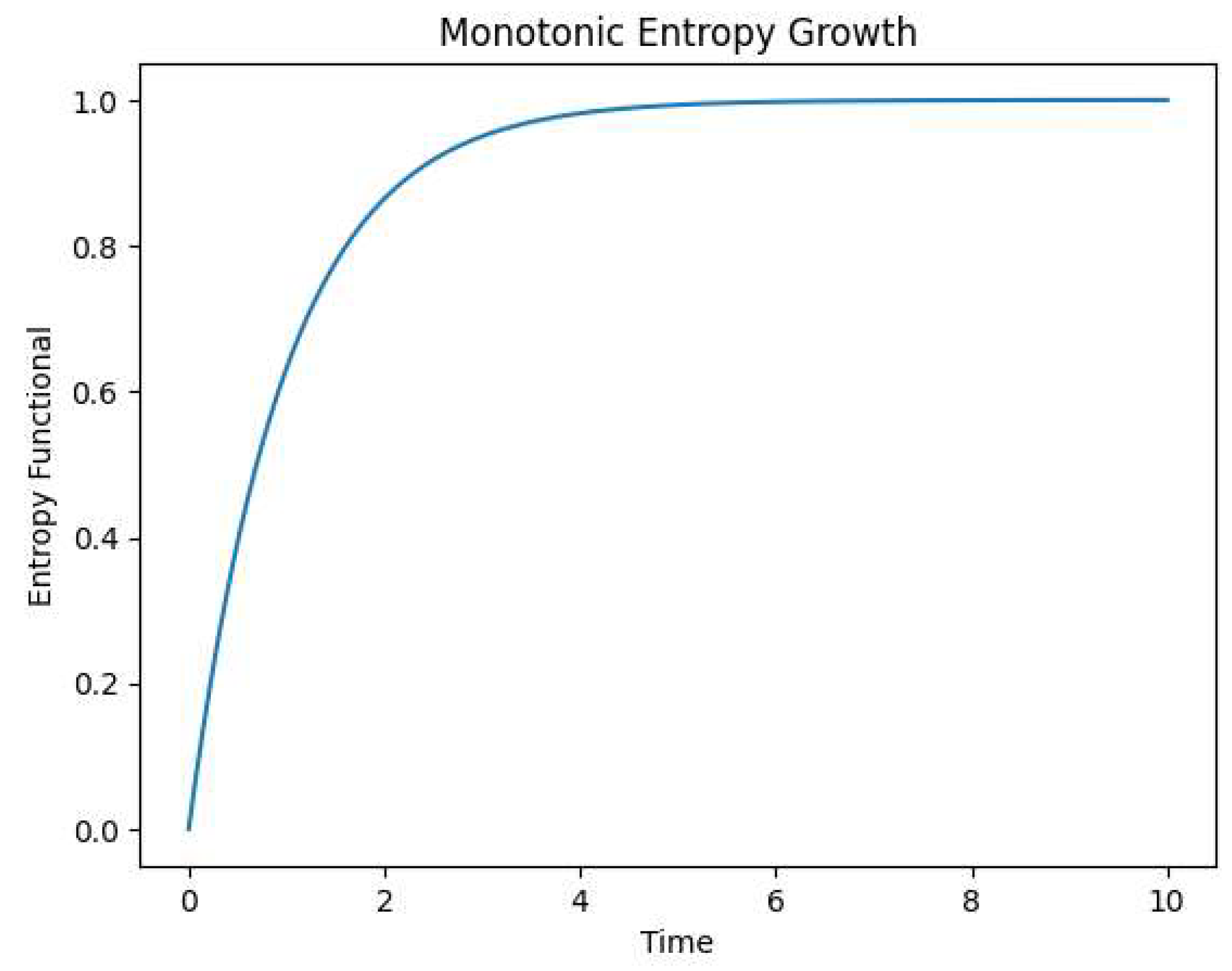
- Entropy S(K)which are conserved or monotone under the respective symmetries.

4. Examples
4.1. Single Mass on a Spring

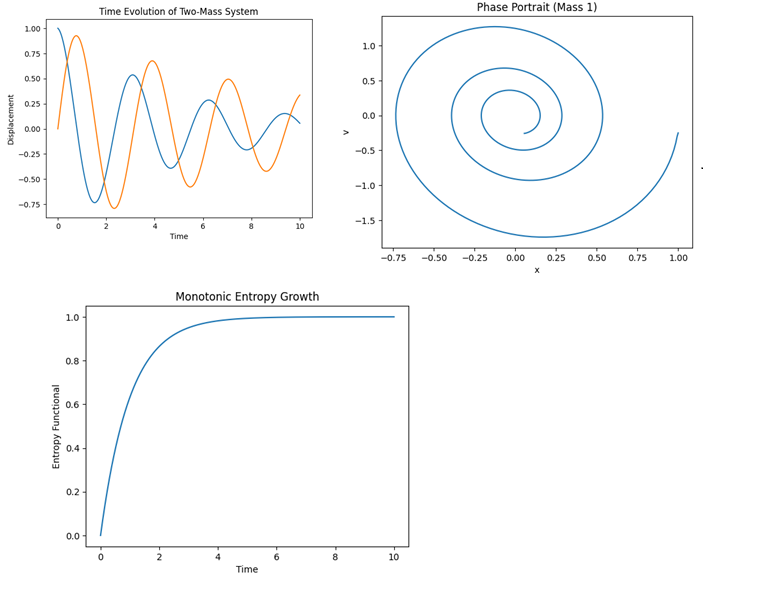
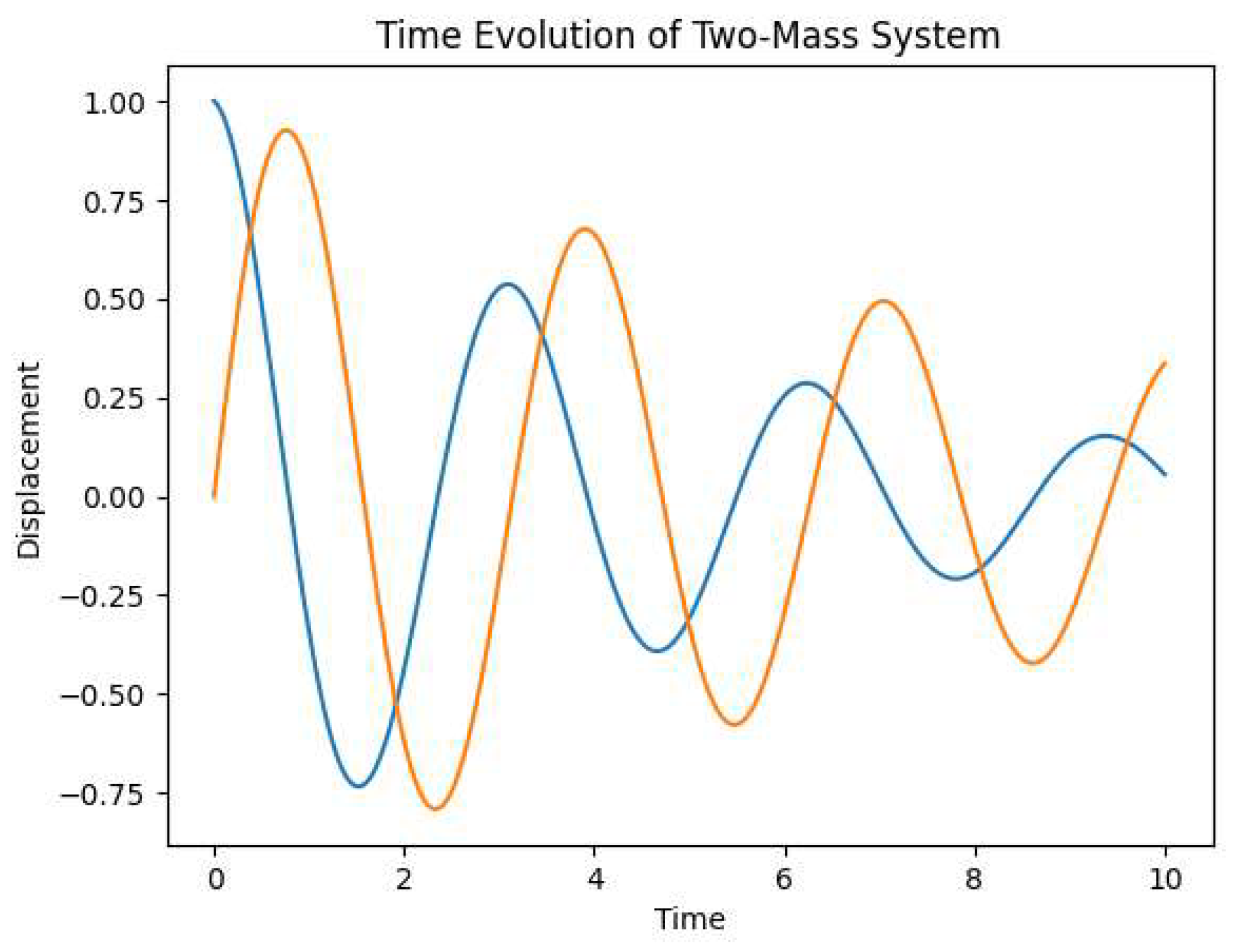
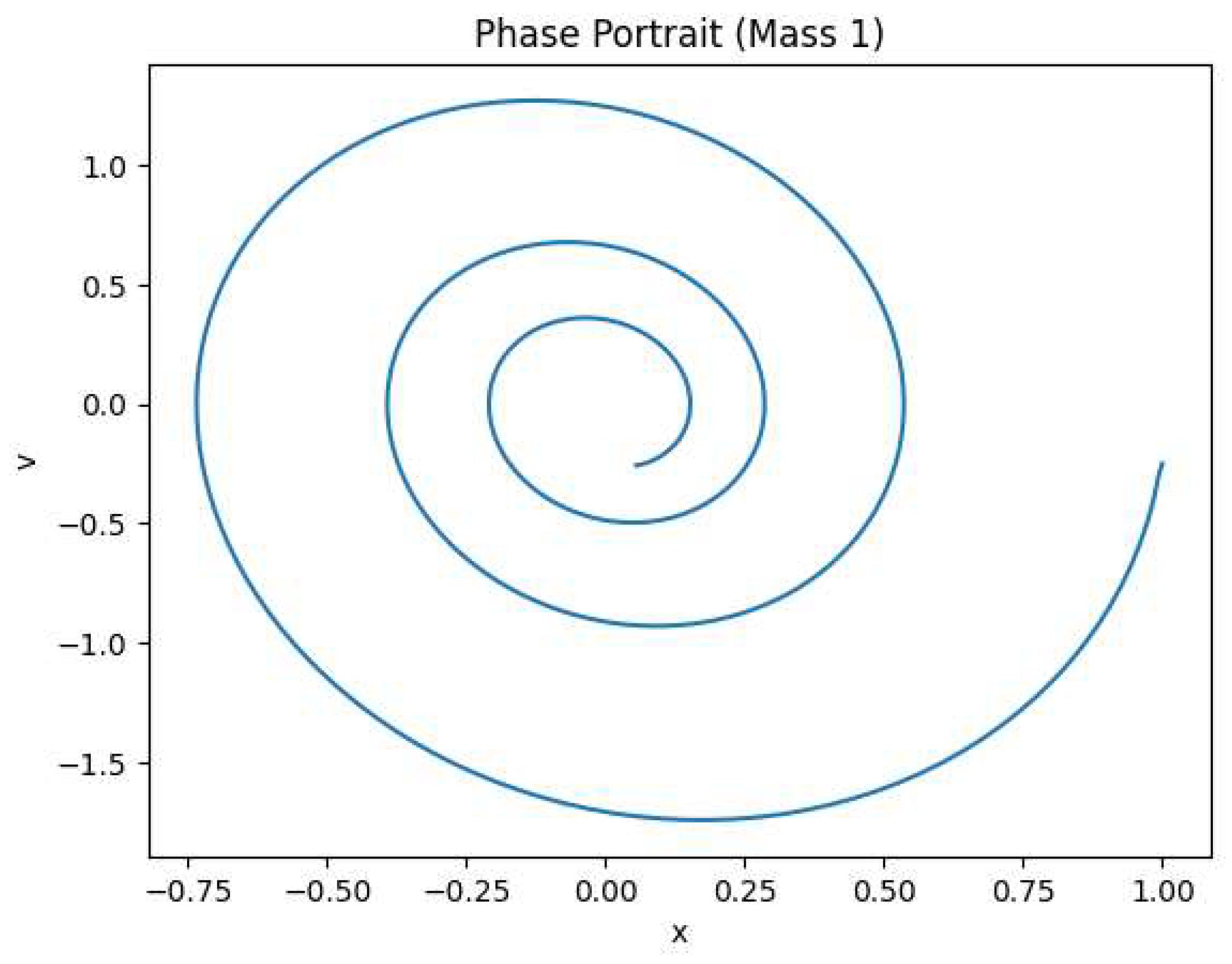
4.2. Two Masses Connected by Springs

4.3. Center of Mass Motion
4.4. Advantages
- Converts all second-order systems to first-order form.
- Uniformly handles internal/external, potential/non-potential forces.
- Simplifies analysis of invariants, symmetries, and generalized energies.
- Universal for finite, continuum, and statistical systems.
4.5. Integration Example

5. Results Obtained
5.1. Universality of the Kuznetsov Equation

5.2. Invariants and Conservation Laws
5.3. Entropic Dynamics and Irreversibility
5.4. Integration Examples and Dynamical Control
5.5. Center-of-Mass Motion and Collective Dynamics
5.6. Generalization and Scalability
5.7. Summary of Results
6. Conclusions
References
- Newton, I. Philosophiæ Naturalis Principia Mathematica. London: Royal Society, 1687, 510 p.
- Lagrange, J. L. Mécanique Analytique. Paris: Gauthier-Villars, 1788, 512 p.
- Hamilton, W. R. “On a General Method in Dynamics.” *Philosophical Transactions of the Royal Society*, vol. 124, 1834, pp. 247–308.
- Noether, E. “Invariante Variationsprobleme.” Nachrichten von der Gesellschaft der Wissenschaften zu Göttingen, 1918, pp. 235–257.
- Arnold, V. I. Mathematical Methods of Classical Mechanics. New York: Springer, 1989, 516 p.
- Goldstein, H., Poole, C., Safko, J. Classical Mechanics. 3rd ed., Pearson, 2002, 638 p.
- Marsden, J. E., Ratiu, T. Introduction to Mechanics and Symmetry. New York: Springer, 1999, 582 p.
- Courant, R., Hilbert, D. Methods of Mathematical Physics, Vol. 1. New York: Wiley, 1989, 561 p.
- Temam, R. Infinite-Dimensional Dynamical Systems in Mechanics and Physics. New York: Springer, 1997, 624 p.
- Evans, L. C. Partial Differential Equations. Providence: AMS, 2010, 749 p.
- Banach, S. Theory of Linear Operations. Warsaw: PWN, 1932, 231 p.
- Reed, M., Simon, B. Methods of Modern Mathematical Physics. Vol. I: Functional Analysis. New York: Academic Press, 1980, 400 p.
- Prigogine, I. From Being to Becoming: Time and Complexity in the Physical Sciences. San Francisco: Freeman, 1980, 272 p.
- Landau, L. D., Lifshitz, E. M. Mechanics. Oxford: Butterworth-Heinemann, 1976, 170 p.
- Onsager, L. “Reciprocal Relations in Irreversible Processes.” Physical Review, vol. 37, 1931, pp. 405–426.
- Villani, C. Optimal Transport: Old and New. Berlin: Springer, 2009, 976 p.
- Morrison, P. J. “A Paradigm for Joined Hamiltonian and Dissipative Systems.” *Physica D*, vol. 18, 1986, pp. 410–419.
- Jaynes, E. T. “Information Theory and Statistical Mechanics.” Physical Review, vol. 106, 1957, pp. 620–630.
- Ebin, D. G., Marsden, J. “Groups of Diffeomorphisms and the Motion of an Incompressible Fluid.” Annals of Mathematics, vol. 92, no. 1, 1970, pp. 102–163.
- Perelman, G. “The Entropy Formula for the Ricci Flow and Its Geometric Applications.” arXiv:math/0211159, 2002.
- Grmela, M., Öttinger, H. C. Dynamics and Thermodynamics of Complex Fluids. I. Development of a General Formalism. Physical Review E, vol. 56, no. 6, 1997, pp. 6620–6632.
- Öttinger, H. C. Beyond Equilibrium Thermodynamics. Hoboken: Wiley, 2005, 376 p.
- Marsden, J. E., West, M. “Discrete Mechanics and Variational Integrators.” Acta Numerica, vol. 10, 2001, pp. 357–514.
- Temam, R. Infinite-Dimensional Dynamical Systems in Mechanics and Physics. 2nd ed., New York: Springer, 2012, 648 p.
- Arnold, V. I., Khesin, B. Topological Methods in Hydrodynamics. New York: Springer, 1998, 374 p.
- Lebowitz, J. L., Spohn, H. “A Gallavotti–Cohen-Type Symmetry in the Large Deviation Functional for Stochastic Dynamics.” Journal of Statistical Physics, vol. 95, 1999, pp. 333–365.
- Evans, D. J., Morriss, G. P. Statistical Mechanics of Nonequilibrium Liquids. 2nd ed., Cambridge: Cambridge University Press, 2008, 530 p.
- Ruelle, D. “Non-Equilibrium Statistical Mechanics Near Equilibrium: Computing Higher-Order Terms.” Nonlinearity, vol. 11, no. 1, 1998, pp. 5–18.

| System type | Classical description | Kuznetsov tensor |
| Material point | x,x˙ | K=(x,v) |
| N-particle system | ri,r˙i | K=(ri,vi) |
| Oscillator | x,x¨ | K=(x,v) |
| Continuum | u(x,t) | K∈K |
| Operator symmetry | Invariant |
| Spatial translation | Momentum |
| Rotation | Angular momentum |
| Time homogeneity | Energy |
| Entropic monotonicity | Entropy |
| Parameters | Regime |
| F(t)=0 | Free oscillations |
| F(t)=F0 | Forced oscillations |
 |
Oscillation suppression |
| Optimal τ | Complete damping |
| System type | Applicability |
| Classical mechanics | Complete |
| Continuous media | Complete |
| Statistical systems | Complete |
| Quantum analogs | Prospective |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).



