
Submitted:
13 November 2025
Posted:
11 December 2025
You are already at the latest version
Abstract
We study minimum-time heliocentric transfers for a spacecraft propelled by an electric thruster that draws constant electrical power P while continuously varying its exhaust speed (variable Isp). The vehicle is assumed to depart from and arrive on circular heliocentric orbits (i.e., initial and final velocities match the local circular velocity at the respective radii). First, we derive an analytic solution of the one-dimensional, gravity-free brachistochrone and discuss how a finite exhaust-speed ceiling modifies the solution, producing a boost–coast–brake structure. Next, we formulate the full planar Sun-field optimal-control problem, derive two closed-form first integrals, and show that the indirect formulation reduces to a seven-dimensional boundary-value problem. Finally, we present a practical numerical continuation strategy that obtains a coarse feasible endpoint via global optimization and then refines it by homotopy and Powell’s local solver. Numerical examples for a 1GW engine with an initial/dry mass of 3000 t→1000 t demonstrate Earth–Jupiter-class transfers in roughly 200–220 days that commonly exploit a solar Oberth pass. Reproducible code and data are available at the project repository.
Keywords:
astrodynamics
; trajectory optimization
; optimal control
; constant-power thrust
; low-thrust transfers
1. Introduction
While electric propulsion (EP) is traditionally valued for its propellant efficiency, future ambitious endeavors such as interplanetary logistics networks or rapid sample return missions will demand not just efficiency but speed [1,2,3]. For such missions, the design focus shifts from optimizing propellant mass to minimizing flight time, making the spacecraft’s power system the primary limiting factor [4]. Reducing transfer times from years to months propels interest in high-power propulsion systems, with gigawatt-class architectures representing a plausible long-term goal. Several pathways to this power scale are being explored, including advanced Nuclear Electric Propulsion (NEP) [5,6], next-generation deployable solar arrays [7], and beamed-energy concepts [8]. A common feature of these technologies is the ability to provide nearly constant power over long thrust arcs. This constant-power paradigm fundamentally alters the classic rocketry framework. Instead of the fixed exhaust velocity () of the Tsiolkovsky equation [9], the exhaust speed becomes a key control variable, allowing the engine to actively trade thrust for specific impulse. The Variable Specific Impulse Magnetoplasma Rocket (VASIMR) is an exemplary technology demonstrating this "constant-power throttling" over a wide operating range [10]. Such throttleability is compelling for the fast transfers that motivate our study, as recent optimization work confirms that varying the specific impulse during flight can significantly improve trip time [11]. In this paper, we develop the machinery to solve the time-optimal transfer problem in this high-power regime. We first derive an analytical solution for a 1D, gravity-free "brachistochrone" to build intuition. We then formulate the full planar Sun-field problem, derive two closed-form first integrals to simplify the dynamics, and present a robust numerical strategy to solve the resulting boundary-value problem. Our examples for a gigawatt-scale engine demonstrate Earth–Jupiter class transfers in a few months, frequently exploiting a solar Oberth maneuver.
2. Variable- Rocket Model
Let be the instantaneous mass () and the exhaust speed. The propellant mass flow rate is the positive quantity . Neglecting plume inefficiencies, the thruster power P (constant) and thrust magnitude T are given by [12]:
where a is the resulting thrust-induced acceleration magnitude. Eliminating gives a direct relationship between the mass flow rate and the vehicle’s acceleration:
This equation forms the basis of our optimal control problem.
3. Exact Solution for the Free-Space Case
With solar gravity absent (), the translational degrees of freedom decouple. The problem simplifies to finding the minimum-time trajectory for a 1D drive from an initial state at to a final state at the final time .
3.1. The Variational Method and the Hamiltonian
To find the optimal control history—in this case, the acceleration profile —we use the calculus of variations, specifically Pontryagin’s Maximum Principle (PMP) [13]. This powerful method converts the problem of minimizing a cost functional (like total time) into a problem of maximizing a new function, the Hamiltonian, at every point in time.
The Hamiltonian, , is constructed to package all essential information about the problem: the cost, the system dynamics, and the controls. The general formula is:
where:
- L is the Lagrangian, or the instantaneous cost. For a minimum-time problem, the total cost is , so the instantaneous cost is simply .
- is the state vector, containing the variables that describe the system (e.g., position, velocity, mass).
- is the control vector, containing the variables we can change to steer the system (e.g., acceleration).
- is the vector of state dynamics, describing how the system evolves.
- is the costate vector, a set of auxiliary variables introduced by the PMP. Intuitively, each costate represents the sensitivity of the final cost to a small change in the state at time t. It is the "price" of that state variable.
3.2. Hamiltonian Construction for the Free-Space Case
We apply the principle from Section 3.1. First, we identify the components of the 1D problem:
- State vector:.
- Control variable:.
- State dynamics:
- Costate vector:.
The term in the Hamiltonian expands to:
Adding the Lagrangian , we obtain the full Hamiltonian :
From this Hamiltonian, we derive the costate (adjoint) equations, given by :
3.3. Optimal Control and First Integrals
According to the PMP, the optimal control must maximize the Hamiltonian at all times. We find it by setting :
From the costate dynamics, we can extract two integrals of motion. First, (8a) directly implies:
Substituting this into (8b) and integrating gives:
showing that the velocity costate is a linear function of time.
A second, less obvious, integral is found by examining the time derivative of the product :
Thus, the product is constant throughout the trajectory:
Substituting these integrals into the control law (9), we discover that the optimal acceleration profile must be linear in time:
where and are constants.
3.4. Deriving the Trajectory
We now determine the constants and by applying the boundary conditions. Let the final time be . First, we integrate to find the velocity :
Applying the final velocity condition :
Substituting this back into reveals its symmetric nature, a characteristic feature of such time-optimal "there-and-back" problems:
Next, we integrate to find the position :
Applying the final position condition :
Substituting into the equation for L allows us to solve for :
This gives . Consequently, . The optimal acceleration is therefore:
This corresponds to an initial acceleration phase, followed by a symmetric braking phase, with crossing zero at mid-time. . By substituting the constants back and simplifying, we obtain the full trajectory:
which describes a cubic-in-time “S-curve” path.
3.5. Mass Evolution and Minimum Time
The mass evolution is governed by the separable differential equation (6). Integrating gives:
The integral of is:
Defining
the mass relation becomes:
The total propellant consumed is found by setting (or ). If the entire propellant reserve is used, we have , which defines the minimum possible flight-time for the given distance L and mass fraction:
calculated as
Solving for yields the final result:
4. Transfers with a Finite Exhaust-Speed Ceiling
The linear-in-time acceleration profile from Section 3 is feasible only if the engine can raise its exhaust speed indefinitely, because diverges when at mid-time. A realistic thruster, however, is limited to a maximum effective exhaust speed . This path constraint forces the optimal trajectory to switch the engine off once the required reaches the ceiling, producing the well-known boost-coast-brake structure [3,14].
This section derives the explicit solution for this case by adapting the unlimited solution. We introduce a coast phase and scale the acceleration profile to satisfy all physical constraints. The problem reduces to solving a single nonlinear equation for the optimal duration of the coast phase.
4.1. Setup and Scaled Trajectory
The trajectory consists of a burn, a coast, and a symmetric braking burn. We define a dimensionless switch fraction , where is the time when the engine is first shut down and is the total transfer time.
We adapt the acceleration profile from the unlimited case, from (21), by scaling it with a constant throttle factor k. The powered phases now run from to and symmetrically at the end. The three unknowns (k, , and ) are determined by the three physical constraints: total distance, total propellant, and the exhaust speed ceiling. The derivation uses the recurring polynomial defined in (26), which is positive for .
4.2. Derivation via Constraint Matching
Since the Pontryagin conditions are preserved on the powered arcs, the scaled linear-in-time profile with an inserted coast is an admissible PMP candidate; enforcing the three global constraints selects the optimal member of this family.
- 1.
- Distance Closure
The total distance traveled, L, is the sum of distances covered during the first burn, the coast, and the final brake. Integrating the velocity profile for the scaled acceleration over the three segments and setting the sum to L uniquely determines the throttle scale k as a function of :
- 2.
- Propellant Closure
The total change in the inverse of mass, , must be consumed over the two symmetric powered phases. Integrating the mass-flow equation (2) using the scaled acceleration gives:
Solving this for the total time and substituting yields the flight time as a function of the switch fraction:
- 3.
- Exhaust Speed Ceiling
The final constraint is that the exhaust speed must not exceed its ceiling, . The critical point is at the switch-off time , where acceleration is lowest and mass has decreased. We impose the limit exactly at this point: . The mass at this point, , is the harmonic mean of the initial and dry masses, , since half the propellant is consumed. Substituting the expressions for , k, and into this ceiling condition gives a single nonlinear equation for the optimal switch fraction :
The function is strictly decreasing on , so if a root exists, it is unique.
4.3. Final Solution and Limiting Cases
The optimal transfer is found by solving the scalar equation for the root using any robust 1-D method. This value is then used in (33) to find the minimum transfer time.
Detecting whether the ceiling is active
If , the ceiling is never touched. The optimal strategy is to never coast, and the minimum time is given by the unlimited-engine benchmark (30). Otherwise, a unique root exists, and the ceiling constraint is active.
Limiting Cases
- Vanishing ceiling. When approaches the minimum useful value, forces . The two powered legs degenerate into instantaneous impulses separated by a long ballistic cruise, as intuition demands.
5. Full Planar Sun-Field Model
We now reinstate solar gravity () and adopt polar coordinates in the ecliptic. The control is the planar thrust acceleration produced by the variable- engine. The state vector and its dynamics are:
5.1. Pontryagin Maximum Principle (PMP)
We again apply the variational framework from Section 3.1. For this time-optimal problem, the performance index is , meaning the Lagrangian is . The components for the Hamiltonian construction are now:
- State vector:.
- Control vector:.
- Costate vector:.
The Hamiltonian, , must be maximized by the optimal control at all times. The dot product term is constructed by multiplying each costate by its corresponding state derivative from (36):
Adding the Lagrangian gives the complete Hamiltonian for the sun-field model. For a minimum-time problem, the PMP asserts that along an optimal trajectory:
- 1.
- The state and costates evolve according to Hamilton’s canonical equations: and .
- 2.
- The optimal control maximizes point-wise.
- 3.
- The Hamiltonian remains constant and equal to zero: .
5.2. Optimal Control Law
To find the control that maximizes , we set the partial derivatives of the Hamiltonian with respect to the control variables to zero:
This yields the optimal thrust acceleration vector:
and the time-varying gain factor is defined as
The optimal thrust direction is parallel to the velocity costate vector . We now show that the gain factor is, in fact, a constant of motion. Recent adaptive algorithms for low-thrust trajectory design exploit similar primer-vector structures to generate high-quality initial guesses for complex transfers [2].
5.3. Costate Equations and First Integrals
The costate dynamics are found from :
From these dynamics, we extract two first integrals.
- Rotational Symmetry
Equation (41b) arises because the Hamiltonian is independent of the absolute angle (a cyclic coordinate). This gives our first integral:
- Mass–Costate Relationship
We find a direct relationship between mass m and its costate by examining their rates of change. Using the chain rule, we have . Substituting from (41e) and (36)e:
This is a separable first-order ordinary differential equation:
Integrating both sides yields , which upon exponentiation gives our second, crucial integral of motion:
This relation holds for the entire trajectory.
- Constant Thrust Gain
Substituting the integral from (43) back into the definition of the gain factor (40), we find that it is constant:
The optimal control law (39) therefore simplifies to:
The thrust magnitude is proportional to the norm of the velocity costates, , and the proportionality factor is a constant determined by the boundary conditions. The discovery of this constant gain is a key analytical result, as it significantly simplifies the nature of the optimal control.
This completes the analytical formulation. The problem is reduced to a boundary-value problem governed by the seven differential equations for the state and non-constant costates , with the control given by (45). A shooting method must find the initial values of the four costates and the thrust constant that satisfy the specified final conditions at the optimal final time .
6. Numerical Procedure
Solving the two-point boundary-value problem requires a numerical approach. We employ a two-stage strategy that combines a global search to find an initial, feasible trajectory with a local refinement process that uses a continuation method to precisely reach the desired target [3,11].
6.1. Objective Function
The core of the numerical method is an objective function, J, which quantifies the quality of a given trajectory. This function is minimized to find the optimal set of initial costate parameters. It incorporates penalties for violating physical constraints and errors for missing the target state. The function has two distinct forms depending on the optimization stage.
6.1.1. Global Search Objective
In the initial search phase, the goal is to find any valid transfer to a stable circular orbit, without a specific target location. The objective function, , is formulated to reward reaching a circular velocity in the outer solar system while penalizing physically unrealistic outcomes:
The terms are defined as:
- : A fuel penalty that applies a large constant value if the final mass drops below the dry mass , effectively creating a hard constraint against using more fuel than available.
- : A radial position penalty, , which discourages solutions that fail to travel a minimum distance (e.g., 1.5 AU) from the Sun.
- : The velocity mismatch error at the final state. It measures the Euclidean distance between the final velocity vector and the required velocity for a circular orbit at the final radius , given by . The squared error is .
- : Positive weighting constants that balance the contribution of each term.
6.1.2. Local Refinement Objective
Once an initial solution is found, the objective function is switched to a targeted version, , to steer the trajectory to a precise destination :
Here, the radial penalty is removed, and two new terms are added to penalize deviations from the desired final radius and true anomaly .
6.2. Two-Stage Optimization Strategy
6.2.1. Stage 1: Global Search
An initial, admissible solution is found by minimizing the global objective function (46). For this task, we use the differential_evolution algorithm from the SciPy library [15]. This robust, population-based method is well-suited for exploring the wide parameter space of the initial costates without getting trapped in local minima, thereby finding a good starting point for the next stage.
6.2.2. Stage 2: Continuation and Local Refinement
Starting from the solution found in Stage 1, which ends at a point , we use a continuation (or homotopy) method to incrementally approach the final desired target [16]. The procedure is as follows:
- 1.
- Set an intermediate target partway between the current known solution’s endpoint and the final desired endpoint.
- 2.
- 3.
- If the optimizer converges to a high-precision solution, the new solution is accepted. The intermediate target is then advanced closer to the final destination, and the process repeats.
- 4.
- If the optimizer fails to converge, it indicates the step to the new target was too large. The intermediate target is then moved back, typically halving the distance between the last successful endpoint and the current target, and the optimization is re-attempted.
- This adaptive stepping ensures that the local optimizer is always given a problem that is a small perturbation from a known good solution, guaranteeing robust convergence across the entire solution space until the final target is reached.
All simulations, optimization procedures, and figures were generated using the accompanying open-source Python implementation [18]. The repository includes the complete solver, plotting scripts, and resulting graphs of trajectories, fuel and acceleration magnitudes.
7. Results
The numerical procedure was applied to compute minimum-time transfers from a 1 AU circular orbit (representing Earth) to various target circular orbits. The targets are defined by their final radius and true anomaly relative to the starting position. A 1 GW engine was assumed with an initial vehicle mass of 3000 tons and a dry mass of 1000 tons.
Figure 1 and Figure 2 show the relationship between flight time and the orbital geometry. The flight times exhibit a U-shaped dependence on the final true anomaly, with a clear minimum for transfers that are neither direct short-arcs nor long-arcs. Similar behavior has been reported in recent multi-objective studies of variable- maneuvers [11].
Figure 3 and Figure 5 show example trajectories. A key feature of these optimal paths is the inclusion of an Oberth maneuver. To gain orbital energy efficiently, the spacecraft first thrusts to lower its periapsis, making a close pass of the Sun. It then applies its main acceleration burn at maximum velocity near the Sun, which is far more effective at increasing orbital energy than thrusting in a higher orbit [19]. This is visible in the plots as an initial dip towards the Sun and a corresponding peak in the acceleration magnitude.
Table 1 and Table 2 present the resulting transfer times in days for a grid of targets. As expected, transfers to more distant orbits take longer. The notation ’N/A’ indicates that the transfer was not achievable with the given propellant load. This typically happens because there is a fixed constraint that cannot be overcome by continuous change of the initial conditions. Figure 5 shows trajectory very close to such a barrier, with very extreme Oberth maneuver around the Sun that cannot be extended further.
Figure 1.
Flight times in days versus final true anomaly at arrival.
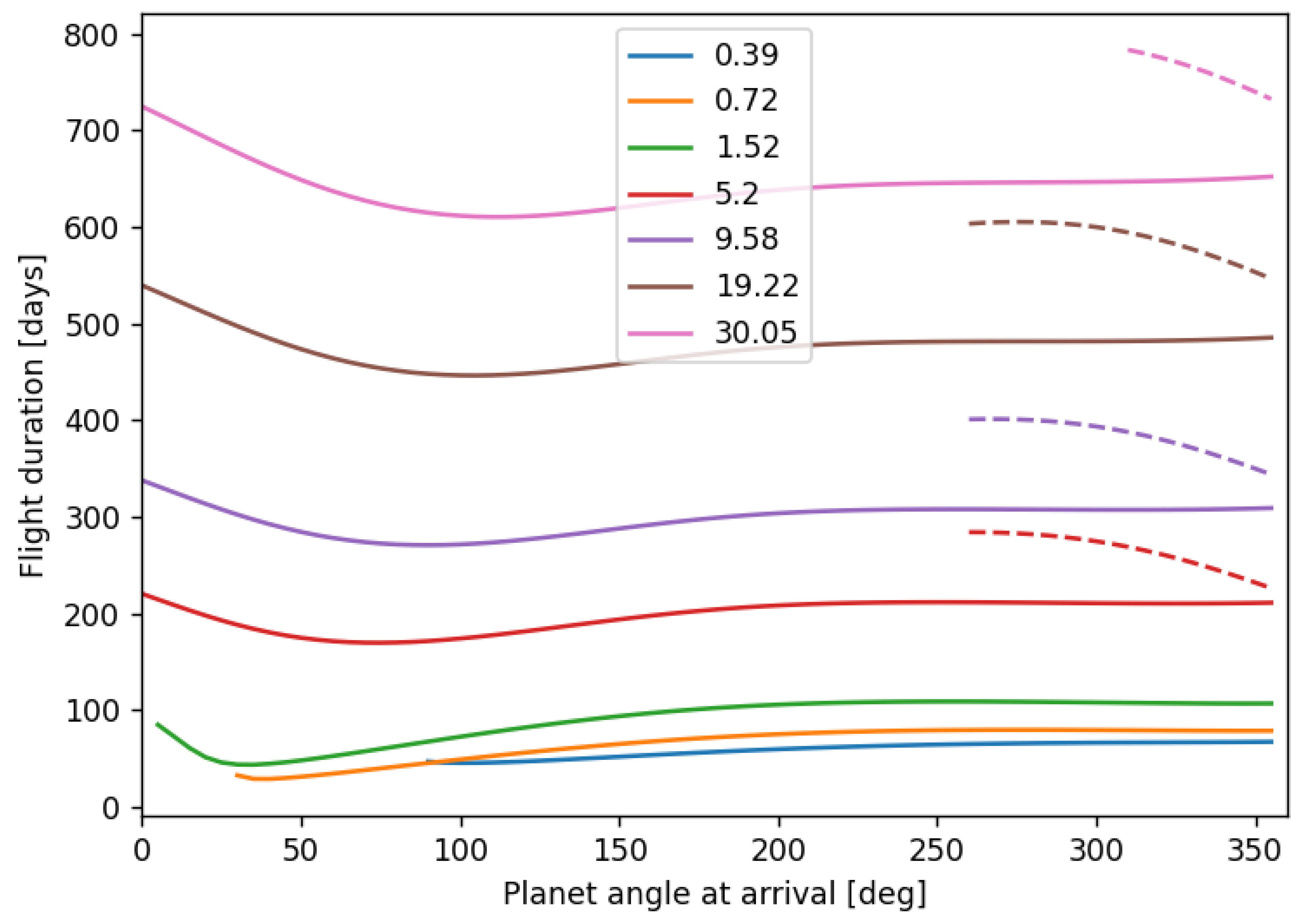
Figure 2.
Flight times in days versus initial true anomaly at departure.
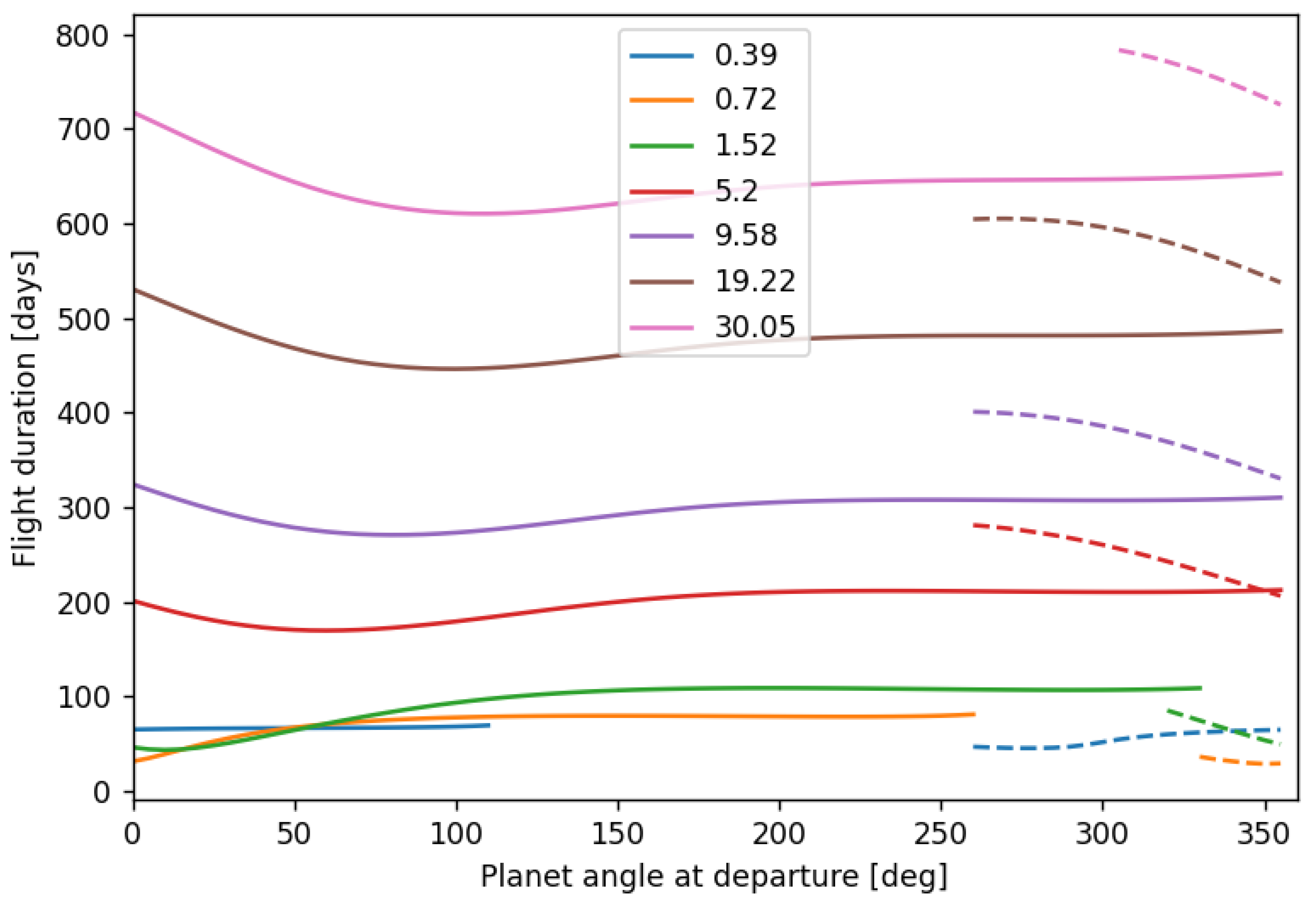
Figure 3.
Example trajectory from AU, to AU, in 207 days. The trajectory includes a solar flyby (Oberth maneuver) to gain energy, which is apparent from the acceleration peak around day 50.
Figure 3.
Example trajectory from AU, to AU, in 207 days. The trajectory includes a solar flyby (Oberth maneuver) to gain energy, which is apparent from the acceleration peak around day 50.
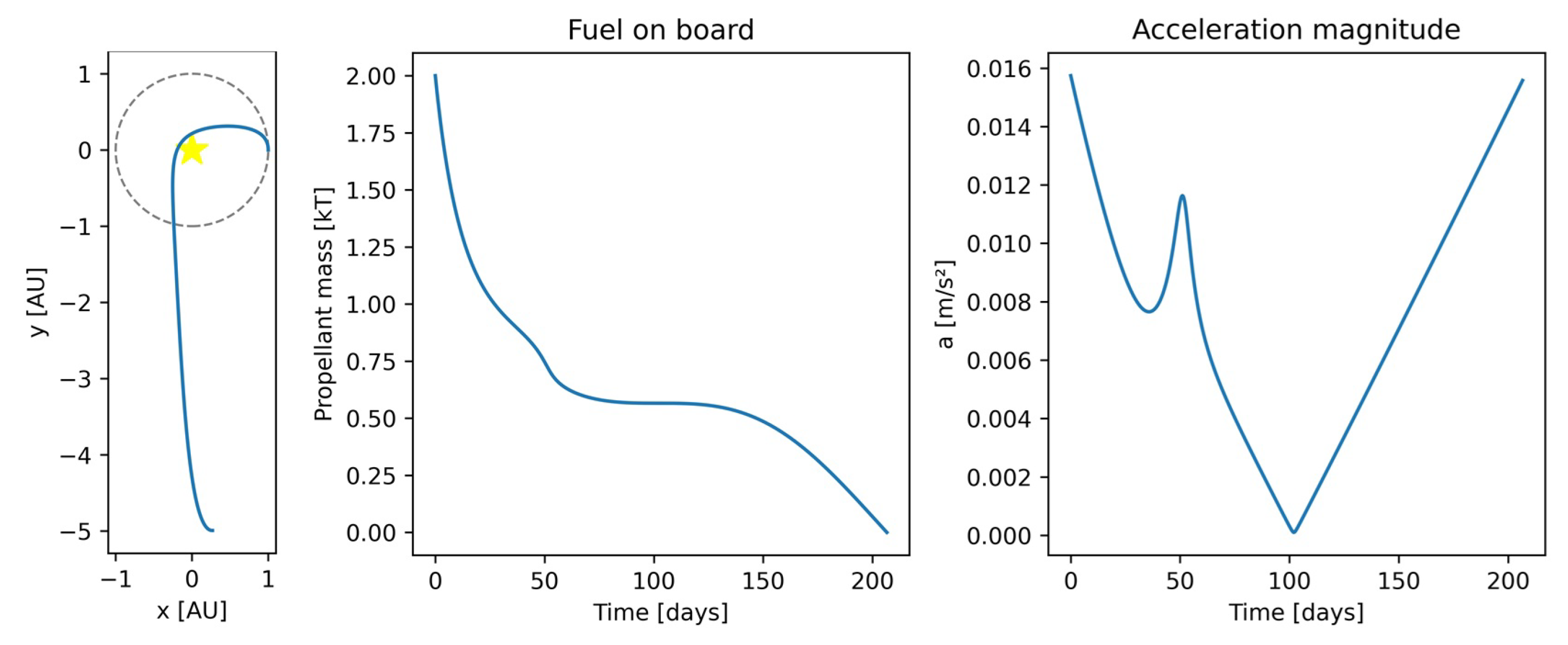
Figure 4.
Example trajectory from AU, to AU, in 44 days. The trajectory is a very close analogy to the trajectories without gravity, demonstrating clear acceleration-deceleration pattern that is almost fully symmetric.
Figure 4.
Example trajectory from AU, to AU, in 44 days. The trajectory is a very close analogy to the trajectories without gravity, demonstrating clear acceleration-deceleration pattern that is almost fully symmetric.
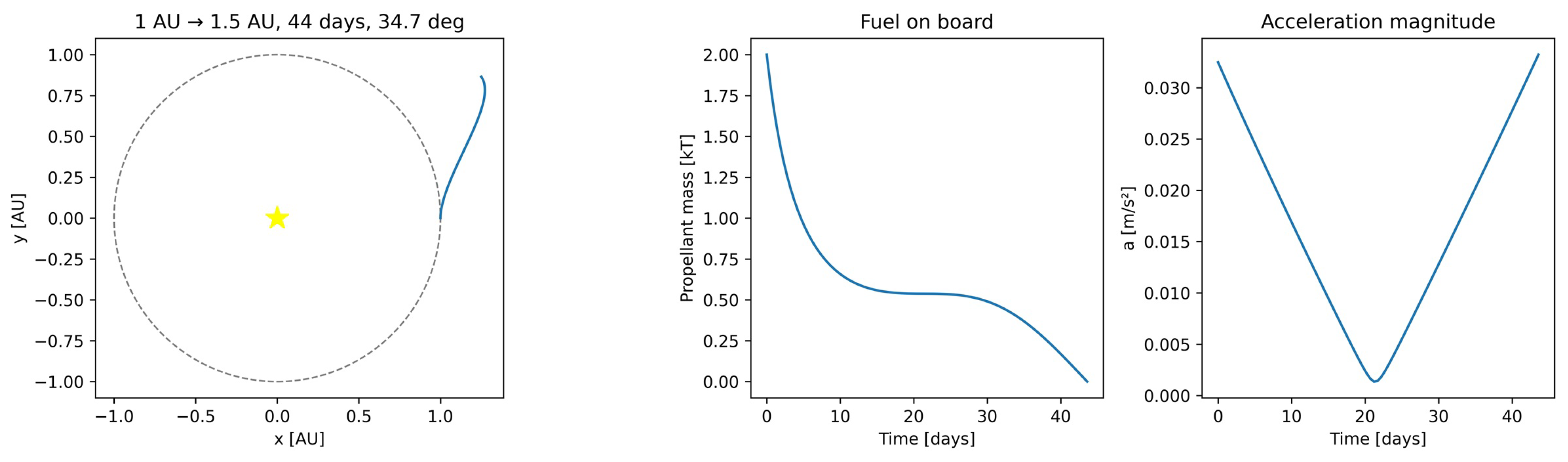
Figure 5.
An example of a more extreme Oberth maneuver for a transfer to Jupiter’s orbit. The trajectory is from AU, to AU, and lasts 214 days.
Figure 5.
An example of a more extreme Oberth maneuver for a transfer to Jupiter’s orbit. The trajectory is from AU, to AU, and lasts 214 days.
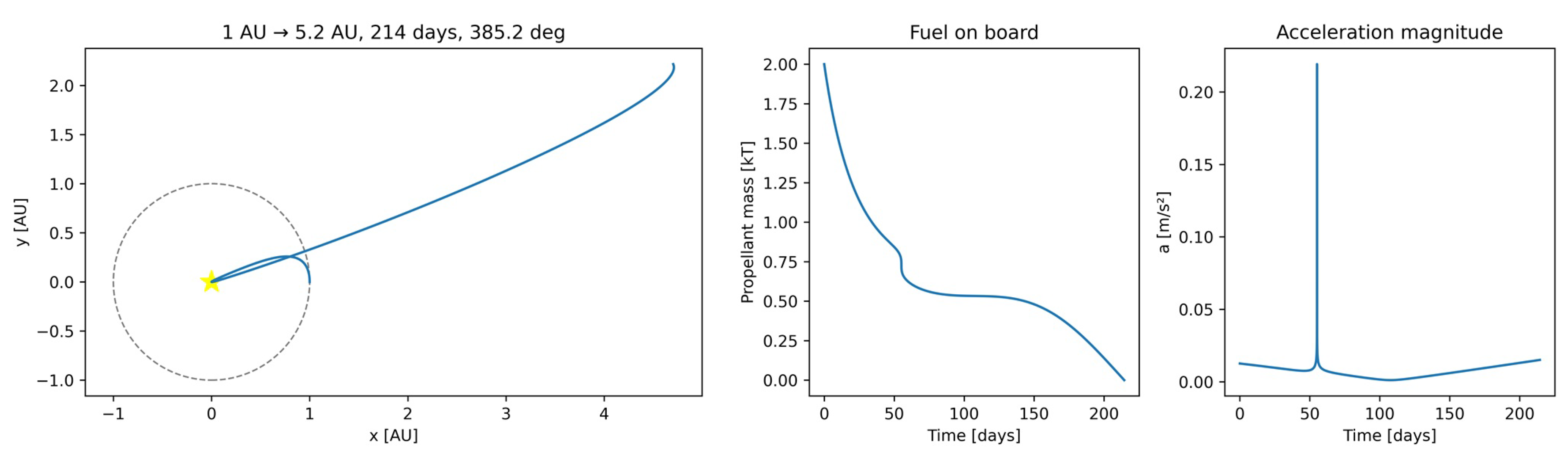

Table 3.
Minimum transfer time (in days) to a circular orbit of 1 AU and final true anomaly (at rocket arrival).
Table 3.
Minimum transfer time (in days) to a circular orbit of 1 AU and final true anomaly (at rocket arrival).
| True Anomaly | Origin Radius (AU) | ||||||
|---|---|---|---|---|---|---|---|
| (∘) | 0.390 | 0.720 | 1.520 | 5.200 | 9.580 | 19.220 | 30.050 |
| 0 | N/A | N/A | 95.77 | 220.50 | 337.82 | 539.56 | 724.64 |
| 5 | N/A | N/A | 84.93 | 214.67 | 331.66 | 532.46 | 716.76 |
| 10 | N/A | N/A | 73.02 | 208.91 | 325.51 | 525.31 | 708.76 |
| 15 | N/A | N/A | 60.90 | 203.30 | 319.44 | 518.16 | 700.69 |
| 20 | N/A | N/A | 51.21 | 197.97 | 313.53 | 511.08 | 692.65 |
| 25 | N/A | N/A | 45.92 | 192.97 | 307.82 | 504.14 | 684.70 |
| 30 | N/A | 32.29 | 43.85 | 188.36 | 302.39 | 497.40 | 676.91 |
| 35 | N/A | 28.90 | 43.65 | 184.19 | 297.29 | 490.93 | 669.34 |
| 40 | N/A | 28.92 | 44.59 | 180.58 | 292.60 | 484.76 | 662.08 |
| 45 | N/A | 29.84 | 46.15 | 177.50 | 288.32 | 478.95 | 655.19 |
| 50 | N/A | 31.18 | 48.07 | 174.95 | 284.47 | 473.58 | 648.68 |
| 55 | N/A | 32.73 | 50.23 | 172.91 | 281.10 | 468.66 | 642.61 |
| 60 | N/A | 34.42 | 52.55 | 171.44 | 278.26 | 464.19 | 637.03 |
| 65 | N/A | 36.19 | 54.97 | 170.45 | 275.88 | 460.24 | 631.95 |
| 70 | N/A | 37.99 | 57.46 | 169.91 | 273.97 | 456.77 | 627.37 |
| 75 | N/A | 39.83 | 59.98 | 169.77 | 272.50 | 453.80 | 623.40 |
| 80 | N/A | 41.69 | 62.51 | 170.05 | 271.54 | 451.38 | 619.96 |
| 85 | 49.67 | 43.54 | 65.05 | 170.67 | 270.98 | 449.42 | 617.07 |
| 90 | 46.93 | 45.39 | 67.57 | 171.58 | 270.81 | 447.98 | 614.71 |
| 95 | 45.83 | 47.22 | 70.08 | 172.74 | 270.99 | 447.01 | 612.86 |
| 100 | 45.46 | 49.03 | 72.54 | 174.16 | 271.54 | 446.45 | 611.58 |
| 105 | 45.51 | 50.82 | 74.97 | 175.77 | 272.38 | 446.33 | 610.73 |
| 110 | 45.85 | 52.58 | 77.36 | 177.54 | 273.50 | 446.58 | 610.38 |
| 115 | 46.37 | 54.31 | 79.67 | 179.42 | 274.83 | 447.17 | 610.46 |
| 120 | 47.00 | 55.99 | 81.93 | 181.41 | 276.38 | 448.10 | 610.91 |
| 125 | 47.72 | 57.63 | 84.12 | 183.47 | 278.09 | 449.30 | 611.70 |
| 130 | 48.49 | 59.22 | 86.23 | 185.58 | 279.93 | 450.74 | 612.82 |
| 135 | 49.31 | 60.76 | 88.27 | 187.70 | 281.87 | 452.36 | 614.21 |
| 140 | 50.15 | 62.24 | 90.22 | 189.81 | 283.87 | 454.17 | 615.83 |
| 145 | 51.02 | 63.68 | 92.07 | 191.90 | 285.92 | 456.10 | 617.64 |
| 150 | 51.89 | 65.04 | 93.84 | 193.93 | 287.97 | 458.09 | 619.58 |
| 155 | 52.75 | 66.35 | 95.49 | 195.89 | 289.99 | 460.14 | 621.61 |
| 160 | 53.61 | 67.60 | 97.05 | 197.76 | 291.96 | 462.19 | 623.69 |
| 165 | 54.45 | 68.79 | 98.49 | 199.53 | 293.86 | 464.22 | 625.79 |
| 170 | 55.28 | 69.89 | 99.84 | 201.18 | 295.66 | 466.18 | 627.86 |
| 175 | 56.08 | 70.94 | 101.08 | 202.72 | 297.35 | 468.07 | 629.88 |
| 180 | 56.86 | 71.91 | 102.23 | 204.13 | 298.92 | 469.85 | 631.81 |
| 185 | 57.61 | 72.83 | 103.26 | 205.39 | 300.35 | 471.50 | 633.62 |
| 190 | 58.33 | 73.68 | 104.18 | 206.52 | 301.64 | 473.03 | 635.31 |
| 195 | 59.02 | 74.46 | 105.02 | 207.52 | 302.79 | 474.40 | 636.87 |
| 200 | 59.68 | 75.17 | 105.76 | 208.39 | 303.80 | 475.63 | 638.27 |
| 205 | 60.31 | 75.83 | 106.41 | 209.14 | 304.67 | 476.72 | 639.52 |
| 210 | 60.90 | 76.42 | 106.97 | 209.77 | 305.42 | 477.67 | 640.64 |
| 215 | 61.46 | 76.96 | 107.45 | 210.30 | 306.06 | 478.48 | 641.61 |
| 220 | 61.98 | 77.44 | 107.87 | 210.73 | 306.58 | 479.17 | 642.44 |
| 225 | 62.47 | 77.86 | 108.21 | 211.07 | 306.99 | 479.75 | 643.17 |
| 230 | 62.93 | 78.23 | 108.48 | 211.34 | 307.32 | 480.22 | 643.76 |
| 235 | 63.35 | 78.57 | 108.69 | 211.52 | 307.58 | 480.60 | 644.27 |
| 240 | 63.75 | 78.84 | 108.84 | 211.65 | 307.75 | 480.90 | 644.68 |
| 245 | 64.10 | 79.07 | 108.95 | 211.72 | 307.87 | 481.14 | 645.02 |
| 250 | 64.44 | 79.27 | 109.01 | 211.75 | 307.94 | 481.31 | 645.30 |
| 255 | 64.74 | 79.41 | 109.03 | 211.73 | 307.97 | 481.43 | 645.51 |
| 260 | 65.01 | 79.53 | 109.01 | 211.68 | 307.96 | 481.51 | 645.68 |
| 265 | 65.26 | 79.62 | 108.97 | 211.61 | 307.92 | 481.57 | 645.82 |
| 270 | 65.49 | 79.66 | 108.88 | 211.51 | 307.87 | 481.60 | 645.93 |
| 275 | 65.69 | 79.68 | 108.78 | 211.39 | N/A | 481.61 | 646.03 |
| 280 | 65.86 | 79.68 | 108.66 | 211.26 | N/A | 481.62 | 646.12 |
| 285 | 66.02 | 79.65 | 108.52 | 211.14 | N/A | 481.62 | 646.21 |
| 290 | 66.16 | 79.61 | 108.36 | 211.00 | N/A | 481.63 | 646.31 |
| 295 | 66.27 | 79.54 | 108.21 | 210.88 | N/A | 481.66 | 646.43 |
| (∘) | 0.390 | 0.720 | 1.520 | 5.200 | 9.580 | 19.220 | 30.050 |
| 300 | 66.38 | 79.47 | 108.04 | 210.75 | N/A | 481.71 | 646.57 |
| 305 | 66.47 | 79.37 | 107.87 | 210.65 | N/A | 481.78 | 646.75 |
| 310 | 66.56 | 79.27 | 107.70 | 210.56 | N/A | 481.89 | 646.96 |
| 315 | 66.63 | 79.17 | 107.54 | 210.49 | N/A | 482.04 | 647.22 |
| 320 | 66.70 | 79.07 | 107.39 | 210.44 | N/A | 482.24 | 647.54 |
| 325 | 66.76 | 78.97 | 107.25 | 210.43 | N/A | 482.48 | 647.93 |
| 330 | 66.83 | 78.89 | 107.13 | 210.45 | N/A | 482.79 | 648.38 |
| 335 | 66.90 | 78.80 | 107.03 | 210.51 | N/A | 483.16 | 648.91 |
| 340 | 66.99 | 78.74 | 106.97 | 210.60 | N/A | 483.61 | 649.55 |
| 345 | 67.08 | 78.70 | 106.94 | 210.75 | N/A | 484.14 | 650.27 |
| 350 | 67.19 | 78.70 | 106.94 | 210.96 | N/A | 484.76 | 651.11 |
| 355 | 67.32 | 78.73 | 107.00 | 211.22 | N/A | 485.47 | 652.06 |
| 360 | 67.48 | 78.82 | 107.10 | 211.54 | N/A | 486.28 | 653.13 |
Table 4.
Minimum transfer time (in days) to a circular orbit of 1 AU and initial true anomaly (at rocket departure).
Table 4.
Minimum transfer time (in days) to a circular orbit of 1 AU and initial true anomaly (at rocket departure).
| True Anomaly | Origin Radius (AU) | ||||||
|---|---|---|---|---|---|---|---|
| (∘) | 0.390 | 0.720 | 1.520 | 5.200 | 9.580 | 19.220 | 30.050 |
| -100 | 46.94 | N/A | 137.22 | 281.20 | 401.02 | 604.64 | 789.45 |
| -95 | 46.28 | N/A | 133.71 | 279.71 | 400.45 | 605.10 | 790.72 |
| -90 | 45.79 | N/A | 130.04 | 277.91 | 399.53 | 605.19 | 791.59 |
| -85 | 45.47 | N/A | 126.23 | 275.81 | 398.24 | 604.86 | 792.02 |
| -80 | 45.48 | N/A | 122.29 | 273.35 | 396.55 | 604.09 | 791.99 |
| -75 | 45.94 | N/A | 118.16 | 270.58 | 394.50 | 602.83 | 791.40 |
| -70 | 47.06 | N/A | 113.88 | 267.49 | 392.03 | 601.11 | 790.28 |
| -65 | 49.09 | N/A | 109.49 | 264.09 | 389.19 | 598.93 | 788.57 |
| -60 | 51.87 | N/A | 104.93 | 260.40 | 385.96 | 596.20 | 786.30 |
| -55 | 54.64 | N/A | 100.21 | 256.39 | 382.37 | 593.01 | 783.38 |
| -50 | 56.91 | N/A | 95.40 | 252.12 | 378.37 | 589.32 | 779.89 |
| -45 | 58.67 | N/A | 90.40 | 247.61 | 374.03 | 585.12 | 775.84 |
| -40 | 60.08 | 42.22 | 85.27 | 242.85 | 369.36 | 580.46 | 771.21 |
| -35 | 61.20 | 39.24 | 80.06 | 237.91 | 364.41 | 575.38 | 766.07 |
| -30 | 62.11 | 36.39 | 74.72 | 232.81 | 359.17 | 569.87 | 760.34 |
| -25 | 62.88 | 33.74 | 69.36 | 227.59 | 353.71 | 564.01 | 754.16 |
| -20 | 63.51 | 31.37 | 64.05 | 222.28 | 348.05 | 557.81 | 747.56 |
| -15 | 64.05 | 29.82 | 58.75 | 216.95 | 342.25 | 551.33 | 740.58 |
| -10 | 64.50 | 28.85 | 53.84 | 211.66 | 336.37 | 544.62 | 733.26 |
| -5 | 64.88 | 29.29 | 49.74 | 206.47 | 330.45 | 537.73 | 725.67 |
| 0 | 65.21 | 31.36 | 46.31 | 201.42 | 324.55 | 530.74 | 717.89 |
| 5 | 65.49 | 34.83 | 44.22 | 196.60 | 318.73 | 523.70 | 709.96 |
| 10 | 65.72 | 39.16 | 43.58 | 192.04 | 313.06 | 516.67 | 701.98 |
| 15 | 65.92 | 43.77 | 44.15 | 187.81 | 307.57 | 509.73 | 694.00 |
| 20 | 66.09 | 48.26 | 45.83 | 183.96 | 302.33 | 502.94 | 686.10 |
| 25 | 66.23 | 52.45 | 48.22 | 180.57 | 297.40 | 496.34 | 678.35 |
| 30 | 66.35 | 56.21 | 51.07 | 177.63 | 292.84 | 490.00 | 670.82 |
| 35 | 66.46 | 59.57 | 54.25 | 175.16 | 288.65 | 483.95 | 663.55 |
| 40 | 66.54 | 62.47 | 57.61 | 173.14 | 284.87 | 478.29 | 656.62 |
| 45 | 66.63 | 65.02 | 61.04 | 171.60 | 281.51 | 473.04 | 650.08 |
| 50 | 66.70 | 67.22 | 64.50 | 170.57 | 278.64 | 468.22 | 643.97 |
| 55 | 66.77 | 69.13 | 67.94 | 169.97 | 276.22 | 463.84 | 638.28 |
| 60 | 66.84 | 70.77 | 71.32 | 169.78 | 274.27 | 459.96 | 633.13 |
| 65 | 66.92 | 72.19 | 74.61 | 169.97 | 272.76 | 456.55 | 628.48 |
| 70 | 67.01 | 73.42 | 77.78 | 170.54 | 271.68 | 453.63 | 624.35 |
| 75 | 67.12 | 74.48 | 80.81 | 171.43 | 271.05 | 451.26 | 620.77 |
| 80 | 67.24 | 75.39 | 83.70 | 172.59 | 270.82 | 449.33 | 617.75 |
| 85 | 67.41 | 76.18 | 86.42 | 173.99 | 270.94 | 447.93 | 615.28 |
| 90 | 67.62 | 76.85 | 88.98 | 175.64 | 271.40 | 446.97 | 613.33 |
| 95 | N/A | 77.43 | 91.36 | 177.44 | 272.19 | 446.44 | 611.88 |
| 100 | N/A | 77.92 | 93.56 | 179.39 | 273.28 | 446.33 | 610.94 |
| 105 | N/A | 78.33 | 95.57 | 181.45 | 274.59 | 446.60 | 610.43 |
| 110 | N/A | 78.67 | 97.42 | 183.58 | 276.10 | 447.20 | 610.38 |
| 115 | N/A | 78.95 | 99.07 | 185.77 | 277.82 | 448.15 | 610.75 |
| 120 | N/A | 79.18 | 100.57 | 187.97 | 279.67 | 449.37 | 611.47 |
| 125 | N/A | 79.36 | 101.92 | 190.15 | 281.62 | 450.82 | 612.50 |
| 130 | N/A | 79.49 | 103.11 | 192.30 | 283.64 | 452.46 | 613.81 |
| 135 | N/A | 79.59 | 104.14 | 194.39 | 285.71 | 454.29 | 615.39 |
| 140 | N/A | 79.65 | 105.06 | 196.39 | 287.79 | 456.23 | 617.15 |
| 145 | N/A | 79.68 | 105.85 | 198.29 | 289.84 | 458.24 | 619.06 |
| 150 | N/A | 79.69 | 106.54 | 200.09 | 291.84 | 460.29 | 621.08 |
| 155 | N/A | 79.66 | 107.11 | 201.74 | 293.77 | 462.35 | 623.15 |
| 160 | N/A | 79.63 | 107.60 | 203.26 | 295.60 | 464.39 | 625.26 |
| 165 | N/A | 79.57 | 108.00 | 204.64 | 297.31 | 466.36 | 627.35 |
| 170 | N/A | 79.49 | 108.32 | 205.88 | 298.90 | 468.25 | 629.38 |
| 175 | N/A | 79.41 | 108.58 | 206.99 | 300.34 | 470.02 | 631.35 |
| 180 | N/A | 79.32 | 108.76 | 207.93 | 301.65 | 471.67 | 633.20 |
| 185 | N/A | 79.22 | 108.90 | 208.75 | 302.80 | 473.19 | 634.91 |
| (∘) | 0.390 | 0.720 | 1.520 | 5.200 | 9.580 | 19.220 | 30.050 |
| 190 | N/A | 79.12 | 108.98 | 209.46 | 303.82 | 474.54 | 636.50 |
| 195 | N/A | 79.02 | 109.02 | 210.05 | 304.69 | 475.76 | 637.95 |
| 200 | N/A | 78.93 | 109.03 | 210.52 | 305.45 | 476.84 | 639.25 |
| 205 | N/A | 78.85 | 108.99 | 210.92 | 306.08 | 477.77 | 640.40 |
| 210 | N/A | 78.77 | 108.93 | 211.22 | 306.59 | 478.57 | 641.40 |
| 215 | N/A | 78.72 | 108.84 | 211.44 | 307.01 | 479.25 | 642.26 |
| 220 | N/A | 78.70 | 108.73 | 211.59 | 307.34 | 479.81 | 643.01 |
| 225 | N/A | 78.71 | 108.60 | 211.70 | 307.59 | 480.28 | 643.64 |
| 230 | N/A | 78.76 | 108.46 | 211.74 | 307.76 | 480.64 | 644.17 |
| 235 | N/A | 78.87 | 108.30 | 211.74 | 307.88 | 480.93 | 644.60 |
| 240 | N/A | 79.06 | 108.15 | 211.71 | 307.94 | 481.17 | 644.95 |
| 245 | N/A | N/A | 107.97 | 211.64 | 307.97 | 481.33 | 645.24 |
| 250 | N/A | N/A | 107.81 | 211.56 | 307.96 | 481.44 | 645.47 |
| 255 | N/A | N/A | 107.65 | 211.45 | 307.92 | 481.52 | 645.64 |
| 260 | N/A | N/A | 107.49 | 211.33 | 307.87 | 481.57 | 645.79 |
8. Conclusion
We combined analytic insight (two closed-form first integrals and a free-space benchmark solution) with a robust continuation strategy to solve the time-optimal transfer problem for a constant-power, variable- engine. The method successfully generates high-performance trajectories, including those featuring Oberth maneuvers, for transfers out to the giant planets with a gigawatt-class engine. Recent developments in variable- propulsion and adaptive low-thrust guidance algorithms [2,11] suggest that further improvements in mission performance are possible. Future work will extend this framework to three-dimensional rendezvous problems.
Acknowledgments
The author wishes to acknowledge the use of large language models (Google’s Gemini and OpenAI’s GPT) for assistance in improving the language and clarity of the manuscript, for aiding in the implementation of the numerical code and derivations of some of the analytical results. The results were tested and verified by the author.
Appendix A. Direct Method Using Spline Parameterization
Before adopting the indirect method based on Pontryagin’s Maximum Principle (PMP) detailed in the main body of this paper, a more straightforward direct method was explored. Direct methods seek to find the optimal trajectory by parameterizing the path with a set of functions and then using a nonlinear programming solver to find the best parameters. This approach avoids the complexity of deriving and solving the costate equations.
Our implementation parameterized the spacecraft’s trajectory, , using cubic splines. The core idea is to define the path by a small number of control points, which become the variables for optimization.
The procedure was as follows:
- 1.
- A fixed number of N control points, for , were defined along the time axis of the transfer. The endpoints, and , were fixed to match the start and end positions of the transfer arc. The initial and final velocities were enforced by connecting the transfer arc to the initial and final circular orbits.
- 2.
- The positions of the intermediate control points were the free variables for the optimization.
- 3.
- For any given set of control points, two cubic splines, and , were fitted to create a continuous and smooth trajectory . A cubic spline is defined piecewise by third-order polynomials, ensuring that the first and second derivatives (velocity and acceleration) are continuous across the entire path.
- 4.
- The required velocity and acceleration vectors were obtained by numerically differentiating the spline functions.
- 5.
- With the total acceleration known, the required thrust acceleration was calculated by subtracting the gravitational component:
- 6.
- The instantaneous mass flow rate was then determined from the thrust acceleration magnitude using (2). Integrating this rate backwards in time yielded the total propellant consumed for the maneuver.
- 7.
- A nonlinear optimizer (specifically, the Nelder–Mead method) was used to adjust the positions of the intermediate control points to minimize a cost function based on the final fuel expenditure and flight time.
Limitations and Stagnation in Local Minima
While conceptually simple, this direct method proved inadequate for finding high-performance trajectories. The primary difficulty was the nature of the optimization landscape. The relationship between the position of a control point and the final mission cost is highly complex and nonlinear. As a result, the search space is filled with a vast number of local minima.
For a very small number of intermediate control points ( or total), the method could find a reasonable, smooth trajectory. However, as the number of control points was increased to grant the path more freedom and potential for higher performance, the dimensionality of the search space grew, and the solver would invariably become trapped in a suboptimal local minimum.
An attempt was made to mitigate this by using a continuation strategy on the number of control points: first, an optimal path with points was found. Then, a fifth point was added at the location of maximum curvature, and the system was re-optimized. While this yielded marginal improvements, the solution quality consistently stagnated far below that achievable with the PMP-based method. The direct spline method lacks the rigorous guidance provided by the costate (or "primer vector") variables, which point the way toward optimality across the entire trajectory. These difficulties ultimately motivated the adoption of the indirect shooting method presented in this work.
References
- Conway, B.A. (Ed.) Spacecraft Trajectory Optimization, Cambridge University Press: Cambridge, UK, 2010.
- Pino, B.P.; Howell, K.C. An energy-informed adaptive algorithm for low-thrust spacecraft cislunar trajectory design. In Proceedings of the AAS/AIAA Space Flight Mechanics Meeting, 2020; pp. AAS 20–579. [Google Scholar]
- Fogel, J.A.; Widner, M.; Williams, J.; Batcha, A. Multi-Impulse to Time Optimal Finite Burn Trajectory Conversion. Technical report, 2020; NASA Johnson Space Center. [Google Scholar]
- Mazouffre, S. Electric propulsion for satellites and spacecraft: established technologies and novel approaches. Plasma Sources Science and Technology 2016, 25, 033002. [Google Scholar] [CrossRef]
- Peakman, A.; Lindley, B. A review of nuclear electric fission space reactor technologies for achieving high-power output and operating with HALEU fuel. Progress in Nuclear Energy 2023, 163, 104815. [Google Scholar] [CrossRef]
- Scott, J.H. The Value Proposition of Multi-Megawatt Electric Power/Propulsion for the Human Exploration of Mars. In Proceedings of the International Astronautical Conference (IAC), 2019; p. number JSC-E-DAA-TN73357. [Google Scholar]
- Chang Díaz, F.R.; Carr, J.A.; Johnson, L.; Johnson, W.; Genta, G.; Maffione, P.F. Solar electric propulsion for human Mars missions. Acta Astronautica 2019, 160, 183–194. [Google Scholar] [CrossRef]
- Sheerin, T.F.; Petro, E.; Winters, K.; Lozano, P.; Lubin, P. Fast Solar System transportation with electric propulsion powered by directed energy. Acta Astronautica 2021, 179, 78–87. [Google Scholar] [CrossRef]
- Tsiolkovsky, K.E. Exploration of cosmic space by means of reaction devices, 1903. English translation; NASA TT F-243, 1965. [Google Scholar]
- Bering, E.A.; Longmier, B.W.; Ballenger, M.G.; Olsen, C.S.; Squire, J.P.; Chang Díaz, F.R. Performance studies of the VASIMR® VX-200. In Proceedings of the 49th AIAA Aerospace Sciences Meeting, Orlando, FL, 2011. [Google Scholar] [CrossRef]
- Di Pasquale, G.; Sanjurjo-Rivo, M.; Pérez Grande, D. A multi-objective variable-specific impulse maneuvers optimization methodology. Advances in Space Research 2024, 73, 20–30. [Google Scholar] [CrossRef]
- Sutton, G.P.; Biblarz, O. Rocket Propulsion Elements, 9th ed.; Wiley: New York, NY, 2017. [Google Scholar]
- Pontryagin, L.S.; Boltyanskii, V.G.; Gamkrelidze, R.V.; Mishchenko, E.F. The Mathematical Theory of Optimal Processes; Pergamon Press: Oxford, UK, 1962. [Google Scholar]
- Pontani, M. Optimal Space Trajectories with Multiple Coast Arcs Using Modified Equinoctial Elements. Journal of Optimization Theory and Applications 2021, 191, 545–574. [Google Scholar] [CrossRef]
- Storn, R.; Price, K. Differential evolution – a simple and efficient heuristic for global optimization over continuous spaces. Journal of Global Optimization 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Allgower, E.L.; Georg, K. Numerical Continuation Methods: An Introduction; Springer: Berlin, Germany, 1990. [Google Scholar]
- Powell, M.J.D. An efficient method for finding the minimum of a function of several variables without calculating derivatives. The Computer Journal 1964, 7, 155–162. [Google Scholar] [CrossRef]
- Olšina, J. Time-Optimal Heliocentric Transfers With a Constant-Power, Variable-Isp Engine 2025. DOI:10.5281/zenodo.17521033. Code and data:. Available online: https://github.com/irigi/VariableISPRocketTrajectories. [CrossRef]
- Oberth, H. Die Rakete zu den Planetenr"aumen; R. Oldenbourg: Munich, Germany, 1923. English translation: The Rocket into Planetary Space. 1923. [Google Scholar]
Table 1.
Minimum transfer time (in days) from a circular orbit of 1 AU and final true anomaly (at rocket arrival).
Table 1.
Minimum transfer time (in days) from a circular orbit of 1 AU and final true anomaly (at rocket arrival).
| True Anomaly | Target Radius (AU) | ||||||
|---|---|---|---|---|---|---|---|
| (∘) | 0.390 | 0.720 | 1.520 | 5.200 | 9.580 | 19.220 | 30.050 |
| 0 | N/A | N/A | N/A | 220.50 | 337.82 | 539.55 | 724.65 |
| 5 | N/A | N/A | 84.99 | 214.66 | 331.66 | 532.47 | 716.76 |
| 10 | N/A | N/A | 73.01 | 208.91 | 325.52 | 525.31 | 708.75 |
| 15 | N/A | N/A | 60.88 | 203.32 | 319.44 | 518.17 | 700.69 |
| 20 | N/A | N/A | 51.35 | 197.98 | 313.53 | 511.09 | 692.64 |
| 25 | N/A | N/A | 45.94 | 192.95 | 307.83 | 504.13 | 684.71 |
| 30 | N/A | 32.66 | 43.80 | 188.35 | 302.40 | 497.40 | 676.93 |
| 35 | N/A | 29.03 | 43.63 | 184.23 | 297.29 | 490.93 | 669.37 |
| 40 | N/A | 28.92 | 44.61 | 180.59 | 292.59 | 484.76 | 662.08 |
| 45 | N/A | 29.86 | 46.15 | 177.47 | 288.32 | 478.95 | 655.19 |
| 50 | N/A | 31.19 | 48.07 | 174.94 | 284.48 | 473.58 | 648.68 |
| 55 | N/A | 32.74 | 50.23 | 172.94 | 281.10 | 468.66 | 642.60 |
| 60 | N/A | 34.42 | 52.55 | 171.44 | 278.25 | 464.20 | 637.00 |
| 65 | N/A | 36.18 | 54.96 | 170.42 | 275.88 | 460.21 | 631.92 |
| 70 | N/A | 38.00 | 57.46 | 169.90 | 273.97 | 456.76 | 627.37 |
| 75 | N/A | 39.84 | 59.98 | 169.80 | 272.50 | 453.79 | 623.38 |
| 80 | N/A | 41.69 | 62.51 | 170.05 | 271.54 | 451.39 | 619.93 |
| 85 | N/A | 43.55 | 65.05 | 170.65 | 270.98 | 449.42 | 617.06 |
| 90 | 46.97 | 45.39 | 67.58 | 171.57 | 270.81 | 447.98 | 614.72 |
| 95 | 45.78 | 47.22 | 70.07 | 172.77 | 270.99 | 447.01 | 612.89 |
| 100 | 45.47 | 49.04 | 72.55 | 174.17 | 271.54 | 446.46 | 611.58 |
| 105 | 45.54 | 50.82 | 74.97 | 175.77 | 272.38 | 446.33 | 610.73 |
| 110 | 45.86 | 52.58 | 77.35 | 177.53 | 273.50 | 446.57 | 610.37 |
| 115 | 46.37 | 54.30 | 79.68 | 179.42 | 274.83 | 447.19 | 610.43 |
| 120 | 47.00 | 55.99 | 81.93 | 181.41 | 276.38 | 448.11 | 610.89 |
| 125 | 47.72 | 57.63 | 84.12 | 183.48 | 278.09 | 449.29 | 611.70 |
| 130 | 48.49 | 59.22 | 86.24 | 185.58 | 279.93 | 450.73 | 612.82 |
| 135 | 49.31 | 60.76 | 88.27 | 187.70 | 281.87 | 452.36 | 614.21 |
| 140 | 50.16 | 62.24 | 90.22 | 189.81 | 283.87 | 454.17 | 615.83 |
| 145 | 51.02 | 63.68 | 92.07 | 191.90 | 285.92 | 456.10 | 617.64 |
| 150 | 51.89 | 65.05 | 93.83 | 193.93 | 287.97 | 458.09 | 619.57 |
| 155 | 52.75 | 66.36 | 95.50 | 195.89 | 289.99 | 460.14 | 621.61 |
| 160 | 53.61 | 67.61 | 97.05 | 197.76 | 291.96 | 462.19 | 623.69 |
| 165 | 54.46 | 68.79 | 98.50 | 199.53 | 293.86 | 464.22 | 625.79 |
| 170 | 55.28 | 69.89 | 99.84 | 201.18 | 295.66 | 466.18 | 627.86 |
| 175 | 56.08 | 70.94 | 101.08 | 202.72 | 297.35 | 468.07 | 629.88 |
| 180 | 56.86 | 71.91 | 102.22 | 204.12 | 298.92 | 469.85 | 631.81 |
| 185 | 57.61 | 72.83 | 103.25 | 205.38 | 300.34 | 471.50 | 633.63 |
| 190 | 58.34 | 73.67 | 104.18 | 206.51 | 301.63 | 473.03 | 635.31 |
| 195 | 59.03 | 74.46 | 105.02 | 207.53 | 302.79 | 474.41 | 636.87 |
| 200 | 59.68 | 75.17 | 105.75 | 208.39 | 303.79 | 475.63 | 638.27 |
| 205 | 60.31 | 75.83 | 106.40 | 209.13 | 304.67 | 476.72 | 639.53 |
| 210 | 60.90 | 76.42 | 106.97 | 209.77 | 305.42 | 477.67 | 640.64 |
| 215 | 61.45 | 76.96 | 107.46 | 210.31 | 306.05 | 478.48 | 641.61 |
| 220 | 61.97 | 77.44 | 107.86 | 210.74 | 306.57 | 479.17 | 642.45 |
| 225 | 62.47 | 77.86 | 108.20 | 211.07 | 306.99 | 479.74 | 643.16 |
| 230 | 62.93 | 78.23 | 108.48 | 211.33 | 307.32 | 480.22 | 643.76 |
| 235 | 63.35 | 78.56 | 108.69 | 211.52 | 307.57 | 480.60 | 644.27 |
| 240 | 63.74 | 78.84 | 108.85 | 211.65 | 307.75 | 480.91 | 644.68 |
| 245 | 64.10 | 79.07 | 108.95 | 211.72 | 307.87 | 481.14 | 645.02 |
| 250 | 64.44 | 79.26 | 109.01 | 211.75 | 307.94 | 481.31 | 645.29 |
| 255 | 64.74 | 79.42 | 109.03 | 211.73 | 307.97 | 481.43 | 645.51 |
| 260 | 65.02 | 79.54 | 109.01 | 211.68 | 307.96 | 481.51 | 645.68 |
| 265 | 65.26 | 79.62 | 108.96 | 211.60 | 307.92 | 481.57 | 645.82 |
| 270 | 65.48 | 79.66 | 108.88 | 211.50 | 307.87 | 481.59 | 645.94 |
| 275 | 65.69 | 79.69 | 108.78 | 211.40 | 307.79 | 481.61 | 646.04 |
| 280 | 65.86 | 79.69 | 108.66 | 211.27 | 307.72 | 481.62 | 646.12 |
| 285 | 66.02 | 79.65 | 108.52 | 211.14 | 307.63 | 481.62 | 646.22 |
| 290 | 66.16 | 79.61 | 108.37 | 211.00 | 307.55 | 481.64 | 646.31 |
| 295 | 66.27 | 79.54 | 108.21 | 210.88 | 307.48 | 481.67 | 646.43 |
| 300 | 66.38 | 79.47 | 108.03 | 210.75 | 307.42 | 481.71 | 646.57 |
| 305 | 66.47 | 79.37 | 107.87 | 210.65 | 307.38 | 481.79 | 646.74 |
| 310 | 66.56 | 79.27 | 107.70 | 210.56 | 307.37 | 481.89 | 646.96 |
| 315 | 66.63 | 79.18 | 107.54 | 210.49 | 307.38 | 482.04 | 647.22 |
| 320 | 66.70 | 79.07 | 107.39 | 210.45 | 307.43 | 482.23 | 647.54 |
| 325 | 66.77 | 78.98 | 107.26 | 210.43 | 307.52 | 482.48 | 647.92 |
| 330 | 66.84 | 78.88 | 107.14 | 210.45 | 307.64 | 482.79 | 648.38 |
| 335 | 66.90 | 78.81 | 107.03 | 210.51 | 307.82 | 483.16 | 648.91 |
| 340 | 66.99 | 78.74 | 106.97 | 210.61 | 308.06 | 483.61 | 649.54 |
| 345 | 67.08 | 78.70 | 106.94 | 210.75 | 308.36 | 484.14 | 650.27 |
| 350 | 67.19 | 78.70 | 106.94 | 210.96 | 308.71 | 484.76 | 651.11 |
| 355 | 67.32 | 78.73 | 107.00 | 211.22 | 309.15 | 485.47 | 652.06 |
| 360 | 67.49 | 78.81 | 107.10 | 211.54 | 309.66 | 486.29 | 653.13 |
Table 2.
Minimum transfer time (in days) from a circular orbit of 1 AU and initial true anomaly (at rocket departure).
Table 2.
Minimum transfer time (in days) from a circular orbit of 1 AU and initial true anomaly (at rocket departure).
| True Anomaly | Target Radius (AU) | ||||||
|---|---|---|---|---|---|---|---|
| (∘) | 0.390 | 0.720 | 1.520 | 5.200 | 9.580 | 19.220 | 30.050 |
| -100 | 46.96 | N/A | N/A | 281.19 | 401.02 | 604.63 | N/A |
| -95 | 46.26 | N/A | N/A | 279.72 | 400.45 | 605.12 | N/A |
| -90 | 45.76 | N/A | N/A | 277.93 | 399.55 | 605.20 | N/A |
| -85 | 45.48 | N/A | N/A | 275.79 | 398.22 | 604.85 | N/A |
| (∘) | 0.390 | 0.720 | 1.520 | 5.200 | 9.580 | 19.220 | 30.050 |
| -80 | 45.50 | N/A | N/A | 273.34 | 396.54 | 604.07 | N/A |
| -75 | 45.92 | N/A | N/A | 270.57 | 394.49 | 602.85 | N/A |
| -70 | 47.06 | N/A | N/A | 267.50 | 392.06 | 601.12 | N/A |
| -65 | 49.08 | N/A | N/A | 264.11 | 389.20 | 598.91 | N/A |
| -60 | 51.87 | N/A | N/A | 260.40 | 385.96 | 596.20 | N/A |
| -55 | 54.65 | N/A | N/A | 256.39 | 382.34 | 592.99 | 783.40 |
| -50 | 56.90 | N/A | N/A | 252.12 | 378.37 | 589.31 | 779.93 |
| -45 | 58.68 | N/A | N/A | 247.60 | 374.05 | 585.12 | 775.84 |
| -40 | 60.08 | N/A | 85.30 | 242.86 | 369.37 | 580.49 | 771.21 |
| -35 | 61.19 | N/A | 80.06 | 237.92 | 364.40 | 575.39 | 766.05 |
| -30 | 62.11 | 36.38 | 74.72 | 232.82 | 359.17 | 569.87 | 760.36 |
| -25 | 62.88 | 33.69 | 69.37 | 227.58 | 353.71 | 564.00 | 754.17 |
| -20 | 63.51 | 31.65 | 64.02 | 222.28 | 348.06 | 557.81 | 747.56 |
| -15 | 64.05 | 29.77 | 58.87 | 216.96 | 342.25 | 551.34 | 740.58 |
| -10 | 64.50 | 28.86 | 53.88 | 211.67 | 336.37 | 544.62 | 733.26 |
| -5 | 64.89 | 29.30 | 49.74 | 206.46 | 330.45 | 537.74 | 725.67 |
| 0 | 65.21 | 31.38 | 46.38 | 201.41 | 324.55 | 530.74 | 717.88 |
| 5 | 65.48 | 34.85 | 44.28 | 196.58 | 318.72 | 523.70 | 709.96 |
| 10 | 65.72 | 39.16 | 43.59 | 192.04 | 313.06 | 516.69 | 701.98 |
| 15 | 65.92 | 43.78 | 44.17 | 187.83 | 307.58 | 509.73 | 694.01 |
| 20 | 66.09 | 48.26 | 45.84 | 184.00 | 302.34 | 502.93 | 686.11 |
| 25 | 66.23 | 52.44 | 48.21 | 180.58 | 297.40 | 496.34 | 678.37 |
| 30 | 66.35 | 56.21 | 51.07 | 177.61 | 292.82 | 490.00 | 670.84 |
| 35 | 66.45 | 59.57 | 54.25 | 175.13 | 288.65 | 483.96 | 663.57 |
| 40 | 66.55 | 62.47 | 57.60 | 173.15 | 284.87 | 478.29 | 656.62 |
| 45 | 66.63 | 65.02 | 61.04 | 171.63 | 281.52 | 473.04 | 650.08 |
| 50 | 66.70 | 67.23 | 64.51 | 170.57 | 278.62 | 468.22 | 643.97 |
| 55 | 66.77 | 69.13 | 67.95 | 169.94 | 276.22 | 463.83 | 638.30 |
| 60 | 66.84 | 70.78 | 71.31 | 169.78 | 274.27 | 459.92 | 633.10 |
| 65 | 66.91 | 72.19 | 74.60 | 169.99 | 272.76 | 456.56 | 628.48 |
| 70 | 67.01 | 73.43 | 77.78 | 170.54 | 271.68 | 453.63 | 624.33 |
| 75 | 67.11 | 74.48 | 80.81 | 171.40 | 271.05 | 451.26 | 620.80 |
| 80 | 67.24 | 75.39 | 83.70 | 172.59 | 270.82 | 449.33 | 617.74 |
| 85 | 67.41 | 76.18 | 86.43 | 174.01 | 270.94 | 447.93 | 615.27 |
| 90 | 67.62 | 76.85 | 88.98 | 175.63 | 271.40 | 446.97 | 613.30 |
| 95 | 67.90 | 77.44 | 91.37 | 177.43 | 272.19 | 446.44 | 611.88 |
| 100 | 68.28 | 77.91 | 93.55 | 179.39 | 273.28 | 446.33 | 610.94 |
| 105 | 68.79 | 78.33 | 95.58 | 181.45 | 274.59 | 446.59 | 610.43 |
| 110 | 69.52 | 78.67 | 97.41 | 183.58 | 276.10 | 447.23 | 610.40 |
| 115 | N/A | 78.96 | 99.09 | 185.77 | 277.82 | 448.16 | 610.75 |
| 120 | N/A | 79.18 | 100.57 | 187.96 | 279.67 | 449.36 | 611.45 |
| 125 | N/A | 79.36 | 101.92 | 190.15 | 281.62 | 450.81 | 612.49 |
| 130 | N/A | 79.50 | 103.10 | 192.30 | 283.64 | 452.46 | 613.81 |
| 135 | N/A | 79.59 | 104.14 | 194.39 | 285.71 | 454.29 | 615.39 |
| 140 | N/A | 79.65 | 105.06 | 196.39 | 287.79 | 456.23 | 617.15 |
| 145 | N/A | 79.68 | 105.84 | 198.29 | 289.84 | 458.24 | 619.06 |
| 150 | N/A | 79.69 | 106.53 | 200.09 | 291.84 | 460.29 | 621.07 |
| 155 | N/A | 79.66 | 107.11 | 201.74 | 293.77 | 462.35 | 623.15 |
| 160 | N/A | 79.63 | 107.59 | 203.26 | 295.60 | 464.39 | 625.26 |
| 165 | N/A | 79.57 | 107.99 | 204.64 | 297.31 | 466.36 | 627.35 |
| 170 | N/A | 79.49 | 108.32 | 205.88 | 298.90 | 468.25 | 629.38 |
| 175 | N/A | 79.41 | 108.58 | 206.97 | 300.33 | 470.02 | 631.35 |
| 180 | N/A | 79.32 | 108.76 | 207.93 | 301.64 | 471.67 | 633.19 |
| 185 | N/A | 79.22 | 108.90 | 208.75 | 302.80 | 473.19 | 634.91 |
| 190 | N/A | 79.12 | 108.99 | 209.46 | 303.81 | 474.55 | 636.50 |
| 195 | N/A | 79.02 | 109.02 | 210.05 | 304.69 | 475.76 | 637.95 |
| 200 | N/A | 78.93 | 109.02 | 210.53 | 305.44 | 476.84 | 639.25 |
| 205 | N/A | 78.85 | 109.00 | 210.92 | 306.07 | 477.78 | 640.39 |
| 210 | N/A | 78.78 | 108.93 | 211.22 | 306.59 | 478.57 | 641.39 |
| 215 | N/A | 78.72 | 108.84 | 211.44 | 307.00 | 479.25 | 642.26 |
| 220 | N/A | 78.70 | 108.73 | 211.59 | 307.33 | 479.80 | 643.01 |
| 225 | N/A | 78.71 | 108.60 | 211.69 | 307.58 | 480.28 | 643.63 |
| 230 | N/A | 78.76 | 108.46 | 211.74 | 307.76 | 480.64 | 644.16 |
| 235 | N/A | 78.87 | 108.31 | 211.74 | 307.88 | 480.94 | 644.60 |
| 240 | N/A | 79.06 | 108.14 | 211.71 | 307.95 | 481.16 | 644.95 |
| 245 | N/A | 79.33 | 107.98 | 211.64 | 307.97 | 481.33 | 645.23 |
| 250 | N/A | 79.74 | 107.81 | 211.55 | 307.96 | 481.44 | 645.46 |
| 255 | N/A | 80.32 | 107.65 | 211.45 | 307.92 | 481.52 | 645.64 |
| 260 | N/A | 81.16 | 107.49 | 211.33 | 307.86 | 481.57 | 645.79 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



