Submitted:
07 November 2025
Posted:
10 November 2025
You are already at the latest version
Abstract
Unmanned aerial vehicles have been around for decades in the aerospace community, looking into the numerous technological and sophisticated solutions for transport alternatives, opening up new frontiers for aerial supremacy, accounting for the exponentially increasing population density. Now, UAVs accountable for their broad variation in their sizes from being minuscule up to a humungous weaponized system, primarily operate on electric systems to achieve better performance and effective payload allowances. With electricity dominating the technological race, improvising the same for sustainability requirements is also a budding area of scrutiny and research. That being well noted, solar power is another dimension of exploiting the concept of renewability and sustainability, owing to its adaptability. Hence, this work is a comprehensive, detailed review of the research that had been undertaken so far, in integrating solar power sources to unmanned aerial vehicles.
Keywords:
unmanned aerial vehicles
; photovoltaic cells
; CuInGaSe
; endurance
; performance
; P-N junction
Introduction
A comprehensive lifecycle assessment (LCA) of the carbon dioxide equivalent (CO2e) emissions of unmanned aerial vehicles (UAVs) compared to conventional and electric delivery methods such as trucks, vans, and tricycles is presented by (Figliozzi). The analysis quantifies energy consumption and CO2e emissions across utilization and vehicle production/disposal phases, identifying environmental tradeoffs in last-mile delivery systems. Utilization phase accounts for energy generation-to-battery (GTB) and battery-to-propeller (BTP) emissions in UAVs, and well-to-tank (WTT) and tank-to-wheel (TTW) emissions for ground vehicles. Vehicle phase includes material extraction, manufacturing, assembly, and end-of-life disposal. UAV model: Micro- drones MD4-3000, 15.1 kg gross takeoff weight, 5 kg payload, 777 Wh battery. Ground comparison: RAM ProMaster diesel van, Renault ZE Kangoo electric van, and an electric tricycle. Single-Delivery (One-to-One). The UAV consumes 47 times less energy than a diesel van per kilometer due to its lightweight structure and electric propulsion. Emission comparison shows 1,000 times lower CO2 emission/km for UAVs despite lower payload capacity. Route-Based (One-to-Many) Deliveries are analyzed as follows: Ground vehicles gain efficiency when serving multiple customers per trip. The Breakeven points are, Diesel van: ~50 customers per route, Electric van: approximately 10–12 customers per route, Electric tricycle: approximately 2–3 customers per route. Vehicle Production and Disposal Impacts such as, UAVs have high emissions per unit mass and require multiple batteries during lifespan, increasing total lifecycle emissions by up to 50%. Electric vans and tricycles exhibit lower production-phase emissions due to fewer electronics and longer lifespans. Thus, it has been concluded that UAVs drastically reduce operational emissions for single-package deliveries, particularly in remote or low-density areas. Electric tricycles outperform UAVs in dense urban environments when multi-drop efficiencies are possible. Lifecycle CO2 emissions show UAV sustainability highly dependent on battery lifespan, use frequency, and route design. Integrating renewable electricity sources further enhances UAV emission efficiency, but production emissions remain a critical consideration.
Solar-Powered Unmanned Aerial Vehicles (SPUAVs) have reached a crucial technological inflection point, evolving from short-duration experimental aircraft to long-endurance, high-altitude platforms capable of remaining airborne for up to 25 days. These systems are now viable candidates for High-Altitude Long Endurance (HALE) and High-Altitude Pseudo-Satellite (HAPS) missions. endurance, near-zero fuel consumption, and cost-effective operations compared to traditional aircraft or satellites. The focus of R&D has shifted from overcoming energy limitations toward addressing structural resilience particularly UV-induced material degradation and enhancing autonomous control and navigation systems. The overarching goal is to achieve sustainable, clean, and efficient UAV systems capable of global, persistent aerial operations. A systematic literature review (SLR) was conducted to synthesize research on SPUAV technology. Out of 312 initial studies, only 28 met stringent quality and relevance criteria (<10% acceptance rate), ensuring analytical depth and reliability. The review spans the period from 1974 to present, emphasizing SPUAV development toward HALE/ HAPS systems. Proprietary and classified military projects were excluded. The study highlights that despite wide interest, only a narrow set of studies offer verifiable data supporting HALE- level endurance and operational reliability. Strategic Context and Operational Relevance SPUAVs occupy a unique niche between low-Earth orbit satellites and conventional aircraft, operating at altitudes above 70,000 ft. Their long duration capability enables persistent surveillance, communication relay, environmental monitoring, and disaster management with minimal operational costs. Modern SPUAV development reflects a strategic pivot from defense-oriented research (e.g., NASA's ERAST program) toward commercial and environmental sustainability goals. This transition marks the shift from demonstrating feasibility to delivering cost-effective, mission-persistent, and eco-friendly operations under emerging civil aviation standards. Modern SPUAVs employ lightweight, high-efficiency photovoltaic cells. Monocrystalline Silicon offers the best balance of weight and power (436 W/kg; 224 W/m2). Gallium Arsenide (GaAs) is used in advanced systems like PHASA-35 for high conversion efficiency. Historically, battery mass restricted nocturnal flight. Advances in Li-S and silicon-anode Li-ion batteries (e.g., Amprius cells) now enable all-night operation by storing surplus daytime energy. (Luqman Sulaiman Al Dhafari)
The review work by (Daning Hao) addresses the growing need for reliable power sources beyond conventional batteries by focusing on PV self-powered technologies, which are promising for alleviating electricity load and environmental pollution. Conventional batteries have limitations like short life and environmental pollution, making PV systems a more reliable and sustainable alternative. The review discusses the importance of analyzing solar resource potential, including theoretical, technical, and economic potential, and provides detailed formulas for calculating different components of solar radiation (direct, diffuse, and ground-reflected radiation) on a tilted surface. The paper analyzes the multiple system designs for PV self-powered applications, which generally consist of three parts. This includes the Maximum Power Point Tracking (MPPT) techniques and Power Management (PM) systems, which are discussed in detail. The MPPT techniques aim to maximize the power output from the PV panel, while PM systems regulate and control the flow of power. Stores the processed electricity to power the application. The review summarizes various PV self-powered applications by classifying them into four major categories based on their application scenarios.
History of Solar UAV Technology
2.1. Experimental UAV Models Incorporating Solar Technology
The paper by (Caner İLHAN) highlights the environmental urgency to shift away from fossil fuels and addresses the potential of solar-powered Unmanned Aerial Vehicles (UAVs) as a sustainable alternative in aviation. The study aims to detail a conceptual design methodology to maximize the UAV's operational efficiency, considering the complex interplay of aerodynamics, structure, and performance requirements for solar integration. The design process follows a methodical strategy, starting with a presizing phase to estimate preliminary dimensions and weights. Key decisions involve selecting components based on efficiency and weight minimization. Monocrystalline silicon cells were chosen for their high efficiency (up to 23%). Lithium-ion batteries with a high energy density of were selected. Maximum Power Point Tracking (MPPT) technology is incorporated to maximize energy harvesting and transfer to the battery. The conceptual design phase used a constraint analysis (represented via a MATLAB-generated graph) to optimize power-to-weight ratios and wing loading. The wings are designed to house solar cells over, which is calculated to yield a net power output. The design uses the Eppler 197 airfoil with no taper, zero incidence, and zero dihedral to simplify cell placement and eliminate shadow effects.
The paper by (Dr. Raghvendra Tiwari) focuses the rapidly growing UAV market and the increasing demand for long-endurance missions (e.g., surveillance, search-and-rescue). Integrating solar energy is presented as an innovative and sustainable solution to provide continuous energy, reducing reliance on traditional fuel or battery systems and decreasing operational costs and environmental impact. The basic concept is that solar panels charge a rechargeable battery while the drone is exposed to sunlight, enabling extended flight. The core approach is to utilize a Hybrid System of solar cells and a battery to supplement power and reduce battery dependence. The methodology includes MATLAB simulation of the PV cell and battery integration circuit to analyze the system's performance and characteristics like State of Charge (SOC) under varying conditions. Polycrystalline Silicon panels are used, typically offering efficiency and being suitable for extreme weather conditions. For a small prototype, a total solar output of was calculated from an area. Lithium-polymer (LiPo) batteries are commonly used due to their high energy density and lightweight nature. The system incorporates essential drone components like the Flight Controller, Electronic Speed Controllers (ESCs), motors, and a Power Distribution Panel. The Photovoltaic cell and battery integration is shown in Figure 1.
This paper by (Tomar) explores the integration of solar power in UAVs to enhance flight endurance and enable sustainable, long-duration operations in aerial robotics. The research is motivated by the depletion of fossil fuel reserves and the environmental costs associated with their use, prompting a shift toward renewable energy like solar power in the aviation sector. The design of a solar-powered UAV, addressing the unique challenges compared to traditional aircraft, such as the dependence on latitude, weather, and solar intake for factors like solar panel size and battery capacity. The study factored in flight altitude, latitude, and time to analyse available solar irradiation. Based on the annual solar irradiation map of India, a reference value of was chosen for most regions to ensure optimal UAV performance. Minimizing weight is crucial for solar-powered UAVs due to the lower efficiency of solar cells, as increased weight directly correlates to higher power consumption. The study yielded an R-value (Solar Cell Area/Wing Area) of 0.65. The wing structure design focused on optimizing the number of solar cells and reducing complexity. The taper ratio and angle of wing incidence were kept at 1 and 0, respectively, to maximize cell utilization and avoid shadowing. The total area available for solar cells on the wing was calculated to be 2.86 m2. The SPUAV model developed by the researchers is showcased in Figure 2.
This paper by (Asutosh Pati) focuses to achieve continuous flight for more than 24 hours using only solar energy. The methodology focuses on ensuring the solar-powered UAV achieves perpetual endurance, meaning it collects more energy than it loses during a day. The power needed for steady level flight was determined to be at least 20 kW. Based on the power requirement, the energy needed for continuous night flight was approximated at 240 kW-hr. Sunpower A-300 cells were chosen for their high efficiency. The area needed to produce was calculated using irradiance models. The Stender model, suitable for solar-powered UAVs, was used to calculate the airframe weight. The wing planform and control surfaces were designed, specifying the aspect ratio, taper ratio, and aileron size, with material choice considering Carbon Fiber Reinforced Polymer (CFRP). The paper concludes that the application of high-altitude long endurance solar UAVs is potentially very large, covering areas like weather surveillance, natural disaster study, and fire direction.
This paper by (Dr. Vivek Sharma) details the development of a Solar Powered Quadcopter Drone as a solution to the limited flight time and battery related constraints of conventional drones used for surveillance and monitoring. The drone is a quad rotor design, making use of four high-powered drone motors with propellers to provide the necessary lift. The drone uses 4 high-powered drone motors which are responsible for flying the drone by spinning the propellers in the correct direction with a three-phase current. Generally, a motor of 12,000 rpm rating is used for flight. The propeller generates air flow and spins, creating a pressure difference for lift. A CKIOS 80-watt Polycrystalline Silicon Solar Panel is used. The solar panels are integrated into the drone body for high-efficiency charging. The drone uses an RC remote controller (like the TX12 model shown) with a radio transmitter to perpetually read stick input and transmit control commands to the onboard RC receiver. A Wi- Fi camera is integrated and can be monitored via an Android smartphone using a Wi-Fi connection. The system architecture includes a Power Management System and Basic Electrical Components. Power Management System (PMS) stores power from the solar panels in the battery. It includes a PV Module (solar panels) that captures and transforms solar power and uses a Battery Module for power storage. An Arduino UNO Microcontroller is connected directly to all modules of the PMS, passing signals to other electrical components and sensors. Basic Electrical Components includes four motor drivers (Motor Drive 1-4) that receive power from the battery and operate the four motors (Motor 1-4) based on instructions from the microcontrollers and the flight control unit. The flight control unit uses an Arduino Nano Microcontroller.
The paper by (Franklin Salazar) details the optimization of the solar energy storage capacity for a fixed-wing Unmanned Aerial Vehicle (UAV) designed for long-endurance monitoring and video surveillance applications. The primary goal is to increase the UAV's flight autonomy by integrating a photovoltaic (PV) solar system while minimizing the battery capacity to reduce the overall aircraft weight. The research focuses on a fixed-wing, glider-type UAV prototype whose design was optimized based on the meteorological conditions of Ambato, Ecuador. The UAV integrates two main systems that draw continuous power are Telemetry (Pixhawk 2.1, Radio 3DR, GPS) and Video System (GoPro Hero 6 Black, Video Transmitter). Propulsion devices include QA2825 engine and DS-843MG servomotors. The telemetry and video systems consume 1117 mA. The average total consumption during flight is calculated at 20.01 Amperes. The Photovoltaic system is designed to act as a backup to minimize battery discharge and extend flight time. 48 C60 monocrystalline solar cells (125x125 mm) are consolidated in series along the fixed wing. The system is capable of supplying a total peak power of 178.56 W. The two photovoltaic modules, including the protective plastic layer and welding connections, add an extra 690 g to the aircraft's weight. The storage system's capacity was optimized using an objective function (OF) and the pymo Python library. The OF aimed to minimize the battery capacity based on the power balance between PV generation, load power, and battery power. The optimal capacity determined by the model was 15 Ah. The prototype utilizes a Lithium Ion (Li Ion-18650) arrangement of 6 cells in series. The Final Battery Capacity is 13.2 Ah for a Total Voltage of 22.2 V. The performance was evaluated through simulation, comparing the system with and without the integrated PV power source.
The work by (Hareesha N G) focuses on developing a solar-powered drone to increase flight endurance and reduce the carbon footprint of aerial operations. The drone design must consider factors like power requirements, high efficiency solar cells, surface area for integration, structural integrity, weight distribution, and aerodynamics. The proposed drone is a quadcopter. A 2200 mAh (2.2 Ah) capacity battery is used. The recommended motor is the A2212-1400KV BLDC Brushless Motor. With an All-Up Weight (AUW) of 1500 grams, the thrust requirement is 3000 grams (750 grams per motor in a quadcopter). The solar power generation system is integrated into the drone for energy harvesting. Four solar cells with a voltage output of 6V each are strategically positioned on the top surface. Two solar cells are connected in series in a row, and these rows are connected in parallel (or vice-versa in the flight- testing section, though the resulting parameters are the same). This configuration effectively doubles the voltage to 12V (aligning with the 11.1V Li-Po battery) and achieves a charging current of 1.6A. This 1.6A output comfortably surpasses the 1A minimum requirement to charge the battery effectively. The system exhibited a peak current production of 1.1A during optimal solar conditions, demonstrating its efficiency.
The paper by (Keerthana Reghunath) aims to demonstrate how solar cells can extend the range of an Unmanned Aerial Vehicle (UAV) and presents the history, applications, and a concise design estimate for a solar-powered UAV. The methodology focuses on comparing the range performance of a UAV using a battery-only configuration versus a battery-and-solar-cell combination. The process includes analyzing the power consumption of various components (motor, payload, etc.) to determine the total power required for flight and calculating the energy required for a given flight time. Designing the aircraft (sizing of wings, fuselage) to minimize drag and maximize efficiency. Estimating the increase in range achieved by supplementing the battery power with solar energy collection. The solar cells used to charge the battery during the day and supplement motor power. The battery provides power for the motor and avionics, especially during low sunlight or night flight. The key design goal is to determine the ideal battery capacity and weight that balances energy storage with reduced airframe weight. Carbon fibers are recommended for manufacturing components.
Figure 3.
A Solar UAV [From (Keerthana Reghunath)].

The paper by (Zhonghua Hu) addresses the urgent need for route planning in solar Unmanned Aerial Vehicles (UAVs), which are valued for their ultra-long endurance and "quasi-satellite" characteristics. Unlike conventional UAV route planning that focuses on threats like radar and missiles, solar UAV planning must also comprehensively consider factors affecting the solar cell's photoelectric conversion efficiency. The Ant Colony Optimization (ACO) algorithm is used to solve the combinatorial optimization problem of finding the lowest-cost route. The final design uses an enhanced version, the ES-TNF-ACO (Elite Strategy - Target Node Factor - Ant Colony Optimization) algorithm, which introduces a Target Node Factor to effectively guide the ants toward the destination node.
The paper by (S. Sathishkumar) introduces the concept of a solar-powered surveillance drone designed to overcome the short flight duration limitation of battery-powered UAVs. By integrating solar panels, the drone can extend its flight time and reduce the need for frequent charging. Selection of solar panels and integration with MPPT (Maximum Power Point Tracking) to optimize energy harvesting. Inclusion of components such as the drone frame, camera, flight controller, and batteries. The method aims to ensure efficient power management for propulsion and on-board electronics to enable longer flight endurance. The design of the solar drone includes Lightweight frame (carbon fiber/aluminum) to improve aerodynamics and support solar panel placement, High-efficiency solar panels mounted strategically to maximize sunlight exposure, Surveillance payload with HD/thermal cameras and communication systems for real-time data transmission, Flight controller with sensors (IMU, GPS, barometer) for stability, navigation, and power management, A hybrid solar + battery system for continuous power, supported by MPPT and DC-DC converters. The drone developed for surveillance is shown in Figure 4.
The paper by (Karthik Reddy Buchireddy Sri) considers the fundamental challenges for solar-powered aircraft, including: Geographical area of operation, Energy collection and storage mechanisms, Payload requirements and Overall design parameters. The draft of the design is being shown in Figure 5. A conceptual design for a plane with a total weight of 2 kg (including payload) is created and analyzed. The design is optimized in various aspects, from the airfoil selection to the complete structural design, to ensure better performance.
The study (O. A. Huseynov) focuses on the strategic operation of Solar-Powered Unmanned Aerial Vehicles (UAVs), particularly how to maximize their functionality by optimizing their flight trajectories with respect to atmospheric conditions. The core of the paper is a research study into the effectiveness and operational efficiency of UAVs equipped with solar panels, specifically when the aircraft is performing ascending and descending maneuvers. The key findings and methodologies include, Focus on Trajectory Optimization research is devoted to determining the optimal flight path (ascent and descent trajectories) for a solar-powered UAV to maximize the energy harvested by its solar panels and Atmospheric Impact Modeling is critical aspect of the study is the inclusion of atmospheric conditions in the energy calculation. The authors use a known formula which suggests that normal solar radiation is inversely dependent on the logarithm of PM2.5 (Particulate Matter 2.5) concentration. By considering this relationship between solar radiation and atmospheric opacity (PM2.5), the paper analyzed different flight trajectory options over a fixed time interval. This approach helps to identify how much higher or lower the UAV should fly to increase its energy intake, particularly in areas with significant atmospheric pollution.
A battery free UAV is attempted by (Jackson Liller Rishabh Goel), which is shown below in Figure 6. The UAV was built using commercial-off-the-shelf (COTS) components and innovative energy management systems to demonstrate sustainable, continuous aerial operation without batteries. Utilizes a solar harvesting system composed of an 86.4 W monocrystalline solar panel array, a supercapacitor bank (six 2.7 V, 500 F capacitors in series), and a maximum power point tracking (MPPT) circuit for energy regulation. The supercapacitor system replaces lithium-based batteries, providing fast charge/discharge cycles and extended operational life. Constructed from laser-cut vinyl-reinforced polystyrene with 3D-printed reinforcements, the fixed-wing design optimizes surface area for solar collection while maintaining high lift-to-drag ratio through MH117 airfoil geometry. The propulsion system consists of an Mn3110-17 Tiger motor paired with a 13x4.4 propeller, capable of generating up to 750 grams-force of thrust under ideal solar conditions. Introduces Greedy Energy-Aware Control (GEAC) and Predictive Energy-Aware Control (PEAC) algorithms to manage intermittent solar input. GEAC adjusts throttle based on predefined voltage thresholds (6–9 V) to prevent brownouts. PEAC dynamically estimates voltage changes over time to prevent total-loss-of-thrust events, offering smoother control during fluctuating sunlight conditions. The experimental findings include: Achieved top speed of 15 m/s and flight altitude of 3 meters, demonstrating controlled takeoff, flight, and landing. Solar data simulation (NSRDB) confirmed operational feasibility between 09:00–13:00 under average irradiance > 537 W/m². Viability maps indicated operability in most temperate and tropical regions between March–October. Proposed extensions include optimizing airframe aerodynamics to reduce parasitic drag and refining the power circuitry for continuous high-thrust operation. This research demonstrates the world’s first fully battery-free, solar-powered UAV, achieving autonomous flight powered entirely by sunlight.
(Mrs. M. Uma Mythraye) presents the design, fabrication, and testing of a solar-powered unmanned aerial vehicle (UAV) aimed at increasing flight duration and promoting sustainable aerial operations. The drone is built with key components including a frame, flight control board, BLDC motors (A2212–1400KV), Electronic Speed Controllers (ESC), Li-Po batteries of 2200 mAh, solar panels used is SunPower C-60 cells with 22% efficiency, Maximum Power Point Tracking (MPPT) unit, GPS module, transmitter, and receiver. The Proportional-Integral-Derivative controller (PID) controller ensures stability in pitch, roll, and altitude, while the MPPT circuit continuously optimizes solar power usage between the motors and the battery. Design calculations established that the power required for level flight is approximately 10.13 W with a cruise velocity of 7.56 m/s. The solar panels (0.04 m² area) with 15.6% efficiency and a performance ratio of 0.75 generate about 9.36 kWh of energy annually. The system uses 20 Li-Po batteries and two solar panels each producing 427.4 mAh, allowing a charging time of around 2.57 hours and an average flight endurance of 2.75 hours per full charge. Experimental results confirmed that the drone successfully harnesses solar power to operate its propulsion system and charge its onboard battery simultaneously. The flight tests demonstrated stable hovering, controlled navigation, and automatic return-to-home capability through GPS tracking. The integration of solar energy extended flight time compared to conventional battery-only drones, validating the feasibility of continuous, eco-friendly aerial operations.
The paper by (Jessa) presents a novel approach for developing a long-range data acquisition system using solar-powered unmanned aerial vehicles (UAVs) capable of operating in remote regions without electricity or communication infrastructure. The concept uses a chain of drones, where each UAV serves as both a data collection unit and a communication relay node, extending the total range far beyond that of a single drone. The main problems addressed are, sustainable energy harvesting for battery charging, selection of drone models that minimize mission time and cost and reduction of flight range due to payload weight. A total of 54 commercial UAVs and 25 solar cells were analyzed. Drone parameters such as battery capacity of 180–5700 mAh, voltage of 3.7V–22.8 V, flight time is for about 6–40 minutes, speed achieved if about 18–112 km/h, and range up to 52.7 km were evaluated. Solar panels were tested for power efficiency which gave the result of 0.42–1.64 W per 100 cm². The study calculated the Total Journey Time (TJT)—the time required to build a full drone network chain of 100 km, factoring in both flight and solar recharging cycles. The most efficient solar cell was identified as Cell ID 25 with 1.64 W/100 cm² efficiency. The Yuneec Mantis Q drone achieved the shortest total journey time (TJT) of 13.99 hours for a 100 km chain, with a battery capacity of 10.36 Wh, flight range of 39.6 km, and speed of 72 km/h. Hubsan X4 H107D and Overmax OV-X-Bee Drone 2.4 ranked second and third with TJTs of 19.79 hours and 23.03 hours, respectively. The least efficient drones were Syma X8 PRO (302.14 hours), Yuneec Typhoon Q500 (295.19 hours), and Yuneec Breeze (215.24 hours). When a 0.2 kg payload was added, flight ranges decreased significantly by 29% for Yuneec Mantis Q, 58% for Overmax OV-X-Bee Drone 2.4, and 85% for Hubsan X4 H107D, requiring more drones to maintain the same 100 km coverage. With payload, Yuneec Mantis Q still ranked best, with a TJT of 20.88 hours, while the Hubsan H501A and Overmax X-Bee Drone 8.0 followed with TJTs of 62.78 hours and 67.60 hours respectively.
The insightful work by (Joana Engana Carmo) paper presents a comprehensive study on enhancing the endurance of electric unmanned aerial vehicles (UAVs) by integrating photovoltaic (PV) solar panels into their structure. The research begins by addressing the major limitation of most UAV platforms which is restricted flight autonomy due to limited onboard energy storage and proposes solar augmentation as a potential solution. The authors conduct a detailed theoretical analysis of aerodynamic, thermal, and environmental interactions influencing PV performance on UAV surfaces, such as wind turbulence, irradiance variation, temperature dependence, and air pressure variation with altitude. Practical modeling shows that under optimal conditions such as in summer solstice at high altitude the solar panels can extend flight time by up to 7.5 minutes, representing nearly a 20% endurance improvement for a UAV with a 40-minute baseline, while under poor conditions like winter solstice and low irradiance the gain drops to mere seconds. Overall, the authors conclude that thin-film silicon PV panels can provide limited but measurable improvements in UAV endurance, especially under high-irradiance, low-weight conditions, and suggest flexible or solar-paint technologies as promising future solutions to overcome energy density and structural limitations.
(H. Hrauda) explore the structural and optoelectronic integration of micro-textured silicon photovoltaic cells into carbon-composite UAV wings for enhanced energy harvesting. The team developed a fabrication method embedding thin PV cells whose size is less than 100 µm within the wing’s composite laminate using resin-transfer molding, forming a multifunctional structure that combines both load-bearing and energy-generating capabilities. Finite element analysis verified minimal structural weakening (less than 3% strain reduction), while optical simulations predicted up to 28% increased power output due to enhanced photon capture. Experimental outdoor testing on small-scale UAV prototypes confirmed a 17% range extension compared to non-solar counterparts.
<2.2. Solar Power Integrated Micro UAVs
(Farid Ibrahim) focuses on evaluating the feasibility of integrating solar photovoltaic (PV) panels with micro fixed-wing UAVs for real-time in-flight battery recharging. The study involves designing and testing a solar-assisted propulsion system that uses lightweight monocrystalline panels mounted on the UAV’s wings to continuously supplement battery power during flight. The authors developed a power management system to regulate charging and discharging cycles between the panels and lithium-polymer batteries. Experimental flight trials under full sunlight demonstrated that solar charging extended endurance by approximately 22–30%, depending on irradiance levels. The research also analyzes the trade-offs of additional structural mass and drag caused by solar integration. Computational analysis showed only minor aerodynamic penalties when the panels were flush-mounted.
The paper by (Aly Abidali) details the design, development, and testing of the Micro Solarcopter, a solar-rechargeable multirotor micro aerial vehicle (MAV) aimed at extending drone endurance using solar energy. The Micro Solarcopter measures 0.15 m × 0.15 m × 0.02 m, weighs 0.071 kg, and is designed for energy autonomy through integrated solar charging. The research addresses the problem of short flight time and high energy demand in rotary-wing drones, which limits their operation compared to fixed-wing systems. The proposed solution combines high-efficiency SunPower C60 solar cells (which have 22% efficiency) with a lightweight lithium-polymer (Li-Po) battery and an intelligent power management system that enables automatic hibernation and solar recharging. The MAV’s key components include a 3D-printed PLA frame, coreless micro motors with gearboxes, a Turnigy Nano-Tech 0.3 Ah, 45–90 C Li-Po battery, and a custom four-cell solar panel (1.65 W output). Control and monitoring are achieved using a HappyModel F3 Evo flight controller, ATtiny85 microcontroller, and Pololu voltage regulators, with an onboard FPV camera providing live video transmission. The experiments showed that purely solar-powered flight without energy storage is not feasible at MAV scale due to surface area and power conversion limitations. However, solar-rechargeable flight significantly enhances operational autonomy.
The Micro Solarcopter demonstrates the first functional solar-rechargeable multirotor MAV, capable of flight, autonomous energy management, and environmental sustainability. The study concludes that future work should focus on fully autonomous flight, swarm coordination, and real-world applications such as surveillance, environmental monitoring, and planetary exploration.
2.3. Solar Power Integrated Mini UAV
The paper by (Philipp Oettershagen) presents the complete design, analysis, and experimental validation of AtlantikSolar, a small, hand-launchable solar-powered unmanned aerial vehicle (UAV) capable of achieving true multi-day flight. The study focuses on developing a comprehensive Conceptual Design and Analysis Framework (CDAF) that models the UAV’s full energy cycle i.e. from solar power generation to battery storage and propulsion consumption across both day and night conditions. The AtlantikSolar UAV is a lightweight 6.93 kg platform with a 5.69 m wingspan, covered by 88 high-efficiency SunPower solar cells (which has 23.7% efficiency) producing a peak of 275 W under ideal conditions. Its lithium-ion battery pack (2.92 kg, 733 Wh) is integrated into the wing spar to maintain structural integrity and center of gravity balance. The power system includes custom-designed maximum power point tracking (MPPT) electronics and a battery management system for optimal energy flow. The aircraft’s avionics are centered on a low-power PX4 autopilot equipped with GPS, IMU, airspeed sensors, and an extended Kalman filter for precise long-term autonomous navigation. The aerodynamic design, lightweight structure, and intelligent energy management collectively enable long endurance with a high degree of reliability. The UAV’s performance was validated through a record-breaking 81-hour continuous flight, covering approximately 2338 km over four days and three nights, setting a new world endurance record for aircraft below 50 kg.
2.4. Organic/Thin Film Polymer Solar Fuel Cells
A comprehensive review by (Krzysztof Sornek)examines the technological state-of-the-art and developmental directions of solar-powered UAVs (SUAVs), encompassing structural design, materials, energy storage, propulsion, and operational strategies. Solar UAVs are characterized by lightweight, high-aspect-ratio fixed-wing configurations that maximize solar surface area and aerodynamic efficiency. The review outlines UAV classifications based on geometry, range, and propulsion type, emphasizing the advantages of electric solar systems using BLDC motors with integrated energy management systems (EMS). The electric propulsion layout includes photovoltaic modules, a DC bus, inverters, and a Battery Management System (BMS) that regulates energy flow between generation, storage, and thrust. Structural optimization is central, materials such as carbon fiber and composite laminates are preferred for their high strength-to-weight ratios, while additive manufacturing techniques (like continuous-belt 3D printing) are highlighted for producing seamless aerodynamic components. Aerodynamic analyses show that distributing PV cells along high aspect-ratio wings can enhance lift-to-drag ratios when properly integrated flush with the surface. Key technological challenges include mitigating structural deformation, maintaining laminar flow, and balancing added PV mass against payload and endurance. The paper reviews optimization algorithms especially genetic algorithms for minimizing mass and maximizing energy efficiency. Examples like “Newsolar” and “SolarÍO” UAVs demonstrate improved energy harvesting and endurance through smart configuration. Future prospects include the development of flexible solar modules, hybrid battery-fuel systems, advanced MPPT algorithms, and multi-objective design frameworks coupling aerodynamics and power management. Overall, the review consolidates engineering principles and research trajectories toward fully sustainable and autonomous solar-powered flight systems.
This study by (H. Hrauda) presents a novel structural integration of micro-textured photovoltaic (PV) cells directly into an ultra-light composite UAV wing, designed to extend flight range without significant weight penalties. Traditional UAVs that mount solar panels externally suffer from silica wafer cracking, aerodynamic inefficiencies, and excessive mass from adhesives and resin layers. To counter these limitations, the researchers engineered a carbon-fiber-based sandwich wing structure using aerogel cores to achieve significant weight reduction (reducing the wing mass from 850 g to 550 g). The PV cells, fabricated from 3-inch p-type silicon wafers (350 µm thick, resistivity 1–3 Ω·cm), were dimensioned at 10 × 22 mm² and embedded within the wing structure using optically stable epoxy resin. Mechanical deformation analyses and simulations using beam-deflection theory confirmed the cells’ tolerance to in-flight loads, with maximum deflection below 0.6 mm. Surface texturing through photolithographically- defined inverse pyramids (10 µm) quadrupled light absorption efficiency by reducing reflection losses and improving infrared absorption. Testing confirmed mechanical durability under UV and thermal cycling. The prototype flight tests demonstrated that integrating these PV cells resulted in a 33% increase in UAV endurance using only one modified wing. This approach marks a major step toward structurally integrated photovoltaic UAV systems combining lightweight composite aerostructures with micro-fabricated solar technologies.
(Matias Alegre Maurer) investigate the feasibility of integrating perovskite solar cells into autonomous drones for extended missions in remote or energy-scarce environments such as jungles, oceans, high-altitude regions, and extraterrestrial terrains. The study highlights perovskite materials superior power-to-weight ratio (approximately 44 W/g), flexibility, and increasing efficiency (exceeding 29%) compared to traditional silicon cells. A prototype 3D-printed drone was modified to include thin-film halide perovskite cells, evaluating their effect on energy capture, mass, and operational duration. The results demonstrate significant potential for perovskite integration in lightweight UAV frames due to their minimal thickness which is one-twentieth the width of a human hair and resilience in harsh environments, with studies noting increased efficiency after prolonged exposure to space conditions. The research details drone use cases across terrains such as LiDAR equipped drones for rainforest mapping, solar-powered ocean drones for marine monitoring, high-altitude pseudo-satellite UAVs (e.g., Zephyr) for stratospheric missions, and conceptual extraplanetary flyers like NASA’s Ingenuity and Dragonfly. The study also reviews concurrent advancements in solid-state and lithium-sulfur batteries, graphene-based lightweight frames, parylene nano- coatings, and intelligent energy management algorithms. Collectively, these innovations could allow future drones to autonomously recharge in situ using integrated perovskite photovoltaics, eliminating the need for docking. The paper concludes that continued material stabilization and flexible encapsulation research are essential for scalable, long-term deployment of perovskite-based solar drones in both terrestrial and extraterrestrial exploration.
This paper by (Bekele Hailegnaw) presents a major advancement in ultralight photovoltaic technology for flight applications. The research, led by Johannes Kepler University Linz, introduces flexible quasi-two-dimensional (quasi-2D) lead halide perovskite solar cells fabricated on ultrathin (less than 2.5 μm) polymer substrates coated with an aluminum oxide barrier layer that enhances environmental and mechanical durability. By incorporating alpha-methylbenzyl ammonium (MBA) iodide into the perovskite crystal structure, the cells achieve reduced non-radiative recombination and enhanced phase stability under mechanical stress. The team achieved a record specific power of 44 W g⁻¹ (average 41 W g⁻¹) with a peak power conversion efficiency of 20.1% and an open-circuit voltage of 1.15 V, without using transparent conductive oxides. These devices were scaled into modules comprising 24 interconnected 1 cm² cells that collectively covered 24 cm² and represented just 1/400th of a drone’s mass. The module successfully powered a 13 g quadcopter, enabling fully energy-autonomous flight that exceeded normal battery endurance limits. The perovskite modules retained up to 90% and 74% of their initial efficiencies after 50 hours of continuous testing under ambient conditions, demonstrating strong operational robustness. This work validates quasi-2D perovskite photovoltaics as high-performance, lightweight, and cost-effective candidates for powering autonomous drones and other mobile robotics, highlighting their potential for aerospace and terrestrial energy harvesting applications in ultra-light flexible electronics.
Discussion
With majority of the notable works done in SPUAVs quoted here, the primary focus is towards the aspects mentioned below:
- Methodology of integrating Solar power with UAVs
- A detailed study on CIGS solar cells on their performance and feasibility
- Categories of UAVs powered by solar power
1.1. Methodology of Integrating Solar Power with UAVs
Unmanned aerial vehicles are diverse in their utility, build and cost. They are almost employed in every service sector such as mapping and geographical surveillance, goods delivery, photography and videography, aerial monitoring and surveillance, agricultural monitoring and pesticidal purposes and the budding concept of air taxis. With UAVs emerging at the forefront of aviation, integrating sustainability and experimenting with the same in impeccable. With the literature presented here, significant points of consideration with respect to the design of the UAV while integrating solar panels, are quoted here, eventually paving a way for a comprehensive framework for the design of SPUAVs.
3.1.1. Engineering Design of the UAV with High Endurance
Any aerial vehicle is highly dependent on the interlinked concepts of aerodynamics, weight distribution and the center of gravity with the constraint of structural integrity. This determines the feasibility of the vehicle and eventually accounts for the performance parameters of range and endurance. A constraint analysis graph, generated using MATLAB code, was used to evaluate performance based on power-to-weight or thrust-to-weight ratios and wing loading by (Tomar). The fuselage design for solar aircraft is simplified by the absence of fuel tanks and fuel lines. A single fuselage and tail boom was deemed most suitable for a lightweight and efficient structure, minimizing surface friction drag and simplifying construction. The length of the fuselage was curtailed to decrease weight and drag. The designed UAV can demonstrate maneuvers at 5000 meters and demonstrates exceptional flight control and stability with a stalling angle of degrees. Upon the factor of weight addition due to the solar modules, most researchers had opted for a viable solution of Li- Po batteries as done by (Asutosh Pati) who had reported that the centre of gravity of the wing is maintained at the optimum quarter chord and a low dihedral is maintained, upon the right component placements including Li- Po batteries. For the structural integrity, lightweight carbon fibres are quoted by researchers. Carbon fibers are recommended for manufacturing components due to their lightweight and strong properties as mentioned by (Keerthana Reghunath). The design involves integrating the solar panels directly onto the wings. Moreover (S. Sathishkumar) quoted that this alternative supports for improved aerodynamics and better solar panel placement.
As mentioned before, the aid of CFD for a multi case analysis is undeniable. Using computational fluid dynamics based on the Navier–Stokes equations and a RANS (Reynolds - Averaged Navier – Strokes Equation) turbulence model, (Joana Engana Carmo) had simulated the aerodynamic flow and pressure distribution on the UAV structure to ensure that the thin-film crystalline silicon solar cells can withstand mechanical stresses during flight. The simulation results confirm that the aerodynamic pressures do not exceed the material yield limits, validating the structural feasibility of solar panel integration. Subsequent solar performance simulations, incorporating irradiance, wind cooling, and temperature effects through the Skoplaki 2 model, demonstrate that power generation and efficiency depend heavily on orientation, altitude, and time of year.
Finite element analysis verified minimal structural weakening (less than 3% strain reduction), while optical simulations predicted up to 28% increased power output due to enhanced photon capture. Experimental outdoor testing on small-scale UAV prototypes confirmed a 17% range extension compared to non-solar counterparts. (H Hrauda)
Focusing the core issue of limited battery life for surveillance drones, under desirable environmental conditions, the incorporation of solar power had drastically reduced the sue of the battery capacity stored by 22.5% as reported by (Vivek Sharma). Similarly, (Hareesha N G) reports a current production of 1.1 Amperes in optimal solar conditions, from the SPUAV they had developed. (Karthik Reddy Buchireddy Sri) had quoted that geographical area of operation, energy collection and storage mechanisms, payload requirements and overall design parameters are the significant aspects for the design of an SPUAV.
(O. A. Huseynov) had focused on Trajectory Optimization research to determine the optimal flight path (ascent and descent trajectories) for a solar-powered UAV to maximize the energy harvested by its solar panels and Atmospheric Impact Modeling is critical aspect of the study is the inclusion of atmospheric conditions in the energy calculation.
3.1.2. Energy Optimization
As opposed to any experiments or practical modelling of a design at its proposition, researchers choose to simulate and computationally analyze the parameters. Furthermore, a single engineering model in itself is seldom self- efficient nor advantageous unless there are kits and components installed to monitor the functioning, health and operability of various components, in major cases. (Dr. Raghvendra Tiwari) had employed a Maximum Power Point tracking (MPPT) kit to maintain the voltage level and ensure the power delivery to be maximum from the solar cells to the battery and eventually the circuits. (S. Sathishkumar) also employs MPPT for optimal energy utilization. In order to compute the effects of solar radiation under various meteorological conditions, (Zhonghua Hu) had developed multiple mathematical models along with the optimization algorithms to predict the performance of the solar cells, considering the factors of solar irradiation angle, mountain shadow occlusion, cloud shading. In addition to this, they had also developed a mountain shadow occlusion cost calculator based on the geometric relationship between the UAVs position, the mountain’s height and the sun’s altitude angle. From the work carried out by (Jessa) a total of 54 commercial UAVs and 25 solar cells were analyzed for a solar drone with the parameters of battery capacity of 6- 40 minutes, velocity of 18- 112 kmph and a maximum range of 52.7 km. The resulting power efficiency lies in between the range of 0.42- 1.64 Watts per 100 sq.cm. Upon calculating the total journey time (TJT), which is the time required to build a drone network chain of 100 km, factoring in both flight and solar recharging cycles. From this the most efficient solar cell was identified as Cell ID 25 with 1.64 Watts per 100 sq.cm efficiency, which also proved to be economical. (Farid Ibrahim) had developed a and lithium-polymer batteries. Experimental flight trials under full sunlight demonstrated that solar charging extended endurance by approximately 22–30%, depending on irradiance levels. The research also analyzes the trade-offs of additional structural mass and drag caused by solar integration. Computational analysis showed only minor aerodynamic penalties when the panels were flush-mounted. In the UAV developed by (Philipp Oettershagen) the UAV had demonstrated exceptional energy resilience, the minimum state-of-charge (SoC) of the battery never dropped below 40%, even during the longest night. On average, the system had 6.8 hours of excess endurance and 6.2 hours of daylight charge margin, indicating significant energy surplus for unforeseen weather conditions or additional payload power needs. Even under partial cloud cover and turbulent winds up to 17 m/s, the UAV maintained stable flight, validating both the robustness of the CDAF design approach and the system’s overall efficiency. (Franklin Salazar) had also developed a low flight UAV catering to the unique meteorological conditions of Ambato, Ecuador and had attained an appreciable increase in endurance as opposed to the weight addition of 690 grams due to the solar modules.
Moreover, a vast number of researchers had reported the use of Li- Po batteries for an efficient charging time as opposed to it weight penalty as mentioned by (Mrs. M. Uma Mythraye)
There are also novel approaches for energy conservation as introduced by (Jackson Liller Rishabh Goel) on employing a supercapacitor bank. a supercapacitor bank (six 2.7 V, 500 F capacitors in series), and a maximum power point tracking (MPPT) circuit for energy regulation. The supercapacitor system replaces lithium-based batteries, providing fast charge/discharge cycles and extended operational life. Constructed from laser-cut vinyl-reinforced polystyrene with 3D-printed reinforcements, the fixed-wing design optimizes surface area for solar collection while maintaining high lift-to-drag ratio through MH117 airfoil geometry. Power tests under simulated solar irradiance showed continuous thrust production up to 350 grams-force, Supercapacitors charged to 12 V in 150 seconds under peak irradiance (40 W), providing robust power buffering against solar intermittency. Proposed extensions include optimizing airframe aerodynamics to reduce parasitic drag and refining the power circuitry for continuous high-thrust operation. The combination of supercapacitor energy storage and adaptive control algorithms establishes a basis for future UAVs capable of indefinite flight under adequate solar conditions.
3.1.3. Note on the Global Trend Towards Sustainability
The main focus is to comprehend the contemporary techniques used for market rebalancing, pricing, and managing the supply demand balance in a power grid with increasing renewable penetration in the work by (J. Shri Saranyaa). The paper notes that power generation globally is rapidly transitioning to renewable energy technologies to address the energy crisis and promote clean energy. This transition is accelerating due to the signing of the Paris Agreement and the goal of achieving grid parity, where RES can compete economically with conventional energy generation. The overall global renewable energy capacity has seen incredible growth. Levelized Cost of Energy (LCOE) is presented as the primary global evaluator for energy pricing, ensuring a fair valuation of generation costs and tracking the achievement of grid parity for different technologies. The survey extensively reviews recent methodologies for LCOE estimation.
Upon considering all these nuances, we present a summarizing framework that serves as an overview for SPUAV design:
1.1. A Detailed Study on CIGS Solar Cells
Copper Indium Gallium Selenide cells have revolutionized the thin film solar cells industry, paving way to new frontiers of interdisciplinary applications and enhancing sustainability to its practical peak. This thesis by (Hurd) investigates the practical application of commercially available thin-film photovoltaic (PV) cells, specifically Copper Indium Gallium Diselenide (CIGS) cells, to extend the endurance and capabilities of military Unmanned Aerial Vehicles (UAVs), with a focus on Small Unmanned Aerial Vehicles (SUAVs) like the RQ-11B Raven. The United States military operates over 11,000 battery-powered UAVs, which provide essential intelligence, surveillance, and reconnaissance capabilities. However, their limited battery life constrains mission duration and tactical flexibility. Increasing battery size to extend endurance is not a viable solution due to weight and volume penalties that compromise payload capacity and portability, especially critical for tactical units operating in austere environments. The thesis aims to explore how integrating flexible, thin-film CIGS solar cells into existing UAVs can enhance flight endurance and operational capabilities. Due to constraints in accessing actual military UAVs, a commercially available battery-powered plane with similar physical characteristics to the RQ-11B Raven was used as a proof-of-concept platform. The study examines solar cell selection, power integration including maximum power point tracking (MPPT), battery technology, and system assembly to demonstrate feasibility. The thesis delves into semiconductor physics and the photovoltaic effect, explaining how p-n junctions convert sunlight into electrical energy. It discusses factors affecting efficiency such as reflection, shading, and temperature effects. Thin-film CIGS cells offer high specific power per unit mass, flexibility to conform to aircraft surfaces, and better potential for integration with minimal aerodynamic penalties. The composition of a typical CIGS cell is shown in Figure 8. Compared to other thin-film technologies like amorphous silicon and cadmium telluride, CIGS cells provide superior efficiency and specific energy density, making them the preferred choice for UAV applications. The study emphasizes minimizing energy losses through optimized power electronics. MPPT technology is critical to operate solar cells at their peak efficiency, incorporating voltage regulation and battery charge control to prevent damage. The variation of cost and efficiency of the photovoltaic cells across generations are shown in Figure 7. Lithium polymer (Li-Po) batteries are standard in UAVs, but lithium-sulfur batteries offer higher energy density, promising longer endurance in future applications. Using off-the-shelf components, solar cells harvested from Global Solar’s portable chargers were adapted and installed on the wings of the proof-of-concept aircraft. The integration included MPPT controllers, voltage limiters, and blocking diodes to manage power flow and protect components. Initial tests characterized battery performance and solar cell output. Despite some MPPT malfunctions, solar charging significantly reduced battery recharge time to 2–3 hours under realistic conditions. The modified aircraft demonstrated endurance increases from 2.5 up to 3 times the baseline flight time under constant throttle conditions. This confirmed that even with less efficient (8%) and heavier solar cells, the net effect of solar integration was substantial. Calculations showed that solar cells contributed approximately 11 W of continuous power during flight, supplementing the battery's energy and validating the feasibility of solar-enhanced UAV endurance. The cost estimate for modifying an RQ-11 Raven with CIGS solar cells, MPPT, and integration materials is under $1,000 per unit, which is economical considering the potential mission benefits and extended operational capability. The research demonstrates that flexible CIGS thin-film photovoltaic cells can effectively extend UAV endurance by a factor of 2.5 to 3, even with non-ideal components. The RQ-11 Raven is identified as a prime candidate for solar modification due to its widespread use and tactical importance. Advances in solar cell efficiency and lighter power electronics will further enhance these gains. Figure 9 and Figure 10 show the Raven- 11 with the desired solar cell assembly.
Among various photovoltaic materials, Copper Indium Gallium Selenide (CIGS) stands out due to its high conversion efficiency greater 20% and potential for cost-effective large-scale production, states the work by (A. Khamisa). The absorber layer in CIGS solar cells is critical as it directly absorbs sunlight and generates charge carriers that produce electricity. Enhancing this layer’s properties and thickness can significantly influence solar cell performance parameters such as open-circuit voltage (Voc), short-circuit current density (Jsc), fill factor (FF), and overall efficiency (η). The absorber layer acts as the "control center" in solar cells, capturing photons and stimulating electron-hole pairs essential for current generation. Optimizing its bandgap and thickness is crucial to maximize photon absorption and minimize recombination losses. Conventional absorber layers use materials like CdS and ZnO as buffer and front contact layers. Innovations focus on integrating materials like Graphene Nanoplatelets (GnP) and Copper Gallium Selenide (CGS) to enhance electrical and optical properties. Efficiency degradation occurs with temperature increases (288 K - 323 K) due to bandgap narrowing, necessitating optimization for temperature stability. Additionally, series resistance impacts fill factor and efficiency, emphasizing the need for low-resistance designs. The study proposes an ultra-thin CIGS solar cell design by modifying the absorber layer's thickness and composition, incorporating GnP and CGS materials. This aims to leverage the excellent electrical conductivity, flexibility, and broad absorption spectrum of graphene, combined with the tunable bandgap and high absorption coefficient of CGS. Graphene Nanoplatelets (GnP) is a two-dimensional material with high electrical conductivity and optical transparency. However, its limited absorption in the visible spectrum means it cannot serve as a standalone absorber and requires combination with other materials. Copper Gallium Selenide (CGS) is a p-type semiconductor with a bandgap around 1.68 eV, offering high absorption even in thin films. Its compositional tunability allows optimization for better sunlight absorption and stability. The study utilized the Solar Cell Capacitance Simulator (SCAPS), a one-dimensional simulation tool developed by the University of Gent, to model and predict electrical performance of solar cells based on capacitance characteristics. It is been found that the increasing thickness generally increased Jsc and efficiency due to enhanced photon absorption but decreased Voc and FF because of recombination losses, Optimal thickness for GnP absorber layer was identified as 0.1 μm with an efficiency of 17.14%, For the combined GnP and CGS absorber layer, thicknesses of 0.1 μm (GnP), 1 μm (CGS), and 1 μm (CIGS) yielded superior performance, enhancing carrier collection and reducing recombination, All electrical parameters (open-circuit voltage, short-circuit current density, fill factor, and overall efficienc) deteriorated as temperature increased due to bandgap narrowing and thermal expansion, The optimal operating temperature was around 300 K, where the ultra-thin CIGS solar cells maintained high efficiency, Increasing series resistance reduced FF and efficiency by causing voltage drops and limiting charge carrier flow, The optimum series resistance was found to be 0 Ω/cm² for maximum performance, Ultra-thin CIGS solar cells with GnP absorber layers showed a 30.02% efficiency improvement over conventional CIGS cells, with Voc increasing by 33.33%, though Jsc slightly decreased due to GnP’s limited light absorption. Incorporating CGS with GnP further improved performance, achieving efficiencies up to 25.33%, then a 28.06% increase over ultra-thin CIGS cells without the proposed absorber layers, Silicon (Si) absorber layers were also tested but showed lower efficiencies compared to CGS due to bandgap instability when paired with CIGS.

Table 1.
Performance Summary Table- From (Hurd).
| Parameter | Conventional CIGS | Ultra-thin CIGS + GnP | Ultra-thin CIGS + CGS | Ultra-thin CIGS + GnP + CGS (Proposed) |
| Efficiency (%) | 15.39 | 20.01 (+30.02%) | 19.95 | 25.33 (+28.06%) |
| Fill Factor (%) | 79.53 | 80.35 (+1.03%) | 79.35 | 79.26 (-0.85%) |
| Jsc (mA/cm²) | 37.96 | 36.41 (-4.08%) | 36.42 | 36.34 (-0.18%) |
| Voc (V) | 0.51 | 0.68 (+33.33%) | 0.69 | +29.26%) |
Thus, the proposed ultra-thin CIGS solar cell with GnP+CGS absorber layer demonstrates promising potential for more efficient, cost-effective photovoltaic devices.
The study by (Md. Ferdous Rahman) focuses on the numerical investigation and optimization of CIGS solar cells using SCAPS-1D simulation software. The key innovations include Replacement of toxic CdS buffer layer with non-toxic alternatives ZnSe and ZnS:In, Introduction of a novel tin sulfide (Sn₂S₃) back surface field (BSF) layer to enhance efficiency and reduce absorber thickness, Optimization of various physical parameters such as absorber and buffer thickness, doping concentration, defect densities, series and shunt resistances, and operating temperature. The proposed optimized structure is Al/FTO/ZnS:In/CIGS/Sn₂S₃/Ni (where ZnS:In is Indium doped Zinc selenide). SCAPS-1D solar simulator was employed to model the heterojunction solar cell, using experimentally verified material parameters at 300 K temperature and AM 1.5G solar spectrum of 100 mW/cm² illumination. CIGS absorber layer is p-type, band gap 1.1 eV, thickness optimized at 0.8 μm. Buffer layers are CdS (toxic), ZnSe, and ZnS:In (which is non-toxic, with band gaps 2.4 eV, 2.9 eV, and 3.1 eV respectively). Sn₂S₃ BSF layer: p⁺-type, band gap approximately 1.09 eV, thickness optimized at 0.05 μm. Front and back contacts are Aluminum (Al) and Nickel (Ni), selected for their work functions and compatibility Among the three buffer layers tested, ZnS:In exhibited the highest power conversion efficiency (PCE) of 21.83%, followed closely by CdS (21.72%) and ZnSe (20.77%). ZnS:In's superior performance is attributed to better lattice matching with CIGS (7.15% mismatch), reduced interface defects, and a wider band gap allowing more photon transmission. Incorporation of the Sn₂S₃ BSF layer significantly improved the solar cell efficiency from 16.09% (without BSF) to 21.83% (with BSF) at the same absorber thickness of 0.8 μm. The high doping concentration in the BSF layer creates an electric field that repels minority carriers from the back contact, reducing recombination losses and enhancing charge collection. Sn₂S₃ also contributes to additional photon absorption, increasing electron-hole pair generation. Without BSF, a thicker absorber greater than 3 μm is required to reach maximum efficiency with BSF, optimal performance is achieved at 0.8 μm thickness, reducing material usage and cost. Optimal acceptor concentration in the CIGS layer was found to be 1 × 10¹³ cm⁻³ to balance open-circuit voltage (V_OC), short-circuit current density (Jsc), and fill factor (FF). Bulk defect density should be minimized (optimized at 1 × 10¹⁴ cm⁻³) to reduce recombination losses and maintain high efficiency. Lower series resistance (Rs) and higher shunt resistance (Rsh) are critical for maintaining high FF and PCE. For example, an increase in Rs from 0 to 7 Ω·cm² reduced PCE from 21.83% to 11.54% Optimal interface defect density at CIGS/ETL and CIGS/BSF interfaces is around 10¹⁰ cm⁻², above which recombination increases and efficiency drops. Increase in operating temperature from 300 K to 475 K, decreases VOC, FF, and overall efficiency, while Jsc remains nearly constant. Quantum Efficiency (QE) improves with absorber thickness and shows high values below 500 nm wavelength, indicating effective photon absorption. The Mott-Schottky plot confirmed a built-in potential (Vbi) of about 0.75 V, consistent with efficient charge separation. ZnS:In shows the least lattice mismatch with CIGS compared to CdS and ZnSe, contributing to reduced interface defects and improved device performance.
(A.M. Ferouani) explain how temperature influences the performance of Copper Indium Gallium Diselenide (CIGS) thin-film solar cells. Using the SCAPS simulation software, the authors analyzed the electrical behavior of a CIGS solar cell structure consisting of a molybdenum (Mo) back contact, a CIGS absorber layer (3000 nm), a cadmium sulfide (CdS) buffer layer (50 nm), and a zinc oxide (ZnO) window layer (80 nm). The study evaluates how parameters such as efficiency (η), open-circuit voltage (Voc), short-circuit current (Jsc), and fill factor (FF) change with temperature. The key principles used in the study are based on photovoltaic conversion and the one-diode equivalent circuit model, which includes series and shunt resistances. The main formulas applied are:
Fill Factor (FF) = Efficiency (η) = Short-Circuit Current Density (Jsc) = , where is the photon flux.
The simulation results revealed that the best performance occurs at a temperature of 300 K, where the cell achieved an efficiency of 20.61%, Voc = 635.2 mV, Jsc = 44.08 mA/cm², and FF = 0.73. As temperature increases above 320 K, Voc and FF decrease, causing a reduction in overall efficiency, while Jsc remains relatively stable between 300–400 K. The study also found that efficiency and power output are most stable at lower operating temperatures less than 320 K and decline rapidly beyond 340 K. In conclusion, the research demonstrates that temperature significantly affects the electrical characteristics of CIGS solar cells, primarily by reducing Voc and efficiency at higher temperatures. The optimal design includes a 3 µm CIGS absorber layer and a 50 nm buffer layer, operating best at ambient temperature (300 K). J–V characteristics of solar cell with variable the temperature of CIGS is presented in Figure 11 which shows that maintaining low operating temperatures is essential for achieving high efficiency in CIGS thin-film solar cells.
The master’s thesis by (Joar Johansson) presents the development and optimization of a numerical model for Cu(In,Ga)Se₂ (CIGS) thin-film solar cell modules. The research combines electrical, optical, and geometrical modeling to enhance the efficiency of CIGS solar modules under both standard and concentrated light conditions. Conducted at Lund University and Uppsala University, the study integrates modeling, simulation, and experimental verification. The objective was to determine the optimal relationship between the cell width and the sheet resistance of the transparent front contact layer (ZnO:Al) to maximize overall module efficiency. CIGS technology offers notable advantages such as low material consumption and high conversion efficiency, making it a strong candidate for thin-film photovoltaics. In addition, low-concentration systems, which use reflectors to focus sunlight onto smaller solar areas, were investigated as a complementary approach. A numerical model based on the one-diode equivalent circuit was implemented in COMSOL Multiphysics, utilizing the finite element method (FEM) to solve the coupled electrical and optical equations. Optimization and parameter sweeps were performed in MATLAB, varying key design factors such as cell width, contact resistance, conductivity, and irradiance. The model incorporated distributed resistances in the front and back contacts, optical transmission losses, and active-area effects from interconnect structures. Experimental data from CIGS mini-modules fabricated at Uppsala University having cell widths of 3, 5, 7, and 9 mm were used for model calibration and validation. The model achieved agreement within ±3% for key performance parameters: open-circuit voltage (Voc), short-circuit current (Isc), fill factor (FF), and efficiency (η). A top efficiency of 15.1% was experimentally measured for a 3 mm cell width module under standard test conditions (STC). Simulation results revealed that for 1 kW/m² (STC), the optimal design had a 3 mm cell width and ZnO:Al sheet resistance of 20 Ω/□ (Ω/□ is read as ohm per square), yielding about 14.5–15% efficiency. Under low concentration (8 kW/m²), the optimal configuration shifted to 2 mm cell width and 10 Ω/□ sheet resistance, achieving 14.6% efficiency. Narrower cells were found to be less sensitive to variations in ZnO:Al sheet resistance (tolerating 6–60 Ω/□) compared to wider cells, which had narrower operational windows. Although narrower cells lose more active area due to interconnect width, this is outweighed by improved optical transmission and lower electrical losses. Further simulations indicated that as irradiance increases, modules optimized for higher illumination (8X and 20modules) maintain efficiency more effectively than standard modules. The 1X module achieved peak efficiency near 1 kW/m², while 8X and 20X modules sustained higher relative efficiencies under intensified light, making them suitable for low-concentrating photovoltaic systems such as MaReCo and Solar8 developed in Sweden. In conclusion, Johansson successfully demonstrated a validated numerical model for CIGS solar cell modules capable of predicting and optimizing performance across different irradiance levels. The study established design guidelines: 3 mm cell width and 20 Ω/□ ZnO:Al for standard applications, and 2 mm cell width and 10 Ω/□ ZnO:Al for low-concentration systems. The model provides a valuable tool for future design and scaling of efficient thin-film solar modules.
(Chencehn Zhao) review major advancements in Cu(In,Ga)Se₂ (CIGS) thin-film solar cells, emphasizing the critical role of alkali element post-deposition treatment (PDT) in improving device performance. Over the past decade, CIGS solar cell efficiency has increased from 20.4% to 23.35%, mainly due to optimized incorporation of alkali metals such as Na, K, Rb, and Cs. The review consolidates recent findings on the mechanisms, processes, and effects of alkali doping in enhancing electrical, structural, and morphological properties of CIGS absorbers. CIGS technology has evolved since 1975, demonstrating advantages like high efficiency, tunable bandgap, and excellent stability. Early breakthroughs, such as the CdS buffer layer and the three-stage co-evaporation process paved the way for efficiencies above 19%. Subsequent discoveries of alkali effects, beginning with Na diffusion from soda-lime glass substrates, revealed improvements in open-circuit voltage (Voc) and fill factor (FF), marking the start of intentional alkali metal incorporation via PDT. Alkali elements affect grain boundary passivation, defect reduction, and carrier concentration. Light alkali metals (Li, Na) penetrate grain interiors, enhancing p-type conductivity by suppressing compensating donor defects, while heavier alkalis (K, Rb, Cs) primarily modify surface chemistry and form secondary AInSe₂ (A = alkali metal) phases, influencing band structure and surface recombination. NaF-PDT: Improves hole concentration, passivates defects, and forms a Na-rich alloy layer that enhances the valence-band alignment. KF-PDT: Introduced by EMPA (2013), achieving 20.4% efficiency on flexible substrates. Potassium modifies the surface, enhances CdS buffer growth, passivates grain boundaries, and suppresses recombination. RbF-PDT: Further improves Voc and FF, achieving efficiencies up to 22.6%, with RbInSe₂ phases at grain boundaries providing superior passivation and carrier transport. CsF-PDT: Used in Solar Frontier’s record 23.35% cell (2019), forming CsInSe₂ compounds that reduce defects, improve carrier lifetime, and modify band bending. Cs remains mainly at grain boundaries due to its large ionic radius, creating Cu-poor regions and enhanced p-type conductivity. Key PDT parameters include substrate temperature (300–400 °C), source temperature, and duration, which determine alkali incorporation and secondary phase formation. The CGI (Cu/Ga/In ratio), GGI grading, and annealing atmosphere also affect the uniformity and electrical characteristics of the treated absorber. Over-treatment or excessive alkali concentration can cause defect states or degraded performance. Alkali element PDTs are now recognized as the most influential technological advancement in CIGS research in the past decade. Each alkali exhibits distinct diffusion behaviour and effects on microstructure and interface chemistry. The synergistic combination of light and heavy alkali metals offers optimized doping profiles, enhancing Voc, Jsc, FF, and overall efficiency. The Figure 12 clearly depicts the progress in the laboratory efficiency of CIGS solar cells. Future work focuses on understanding atomic-scale mechanisms, defect dynamics, and scaling of alkali-treated CIGS modules for industrial applications.
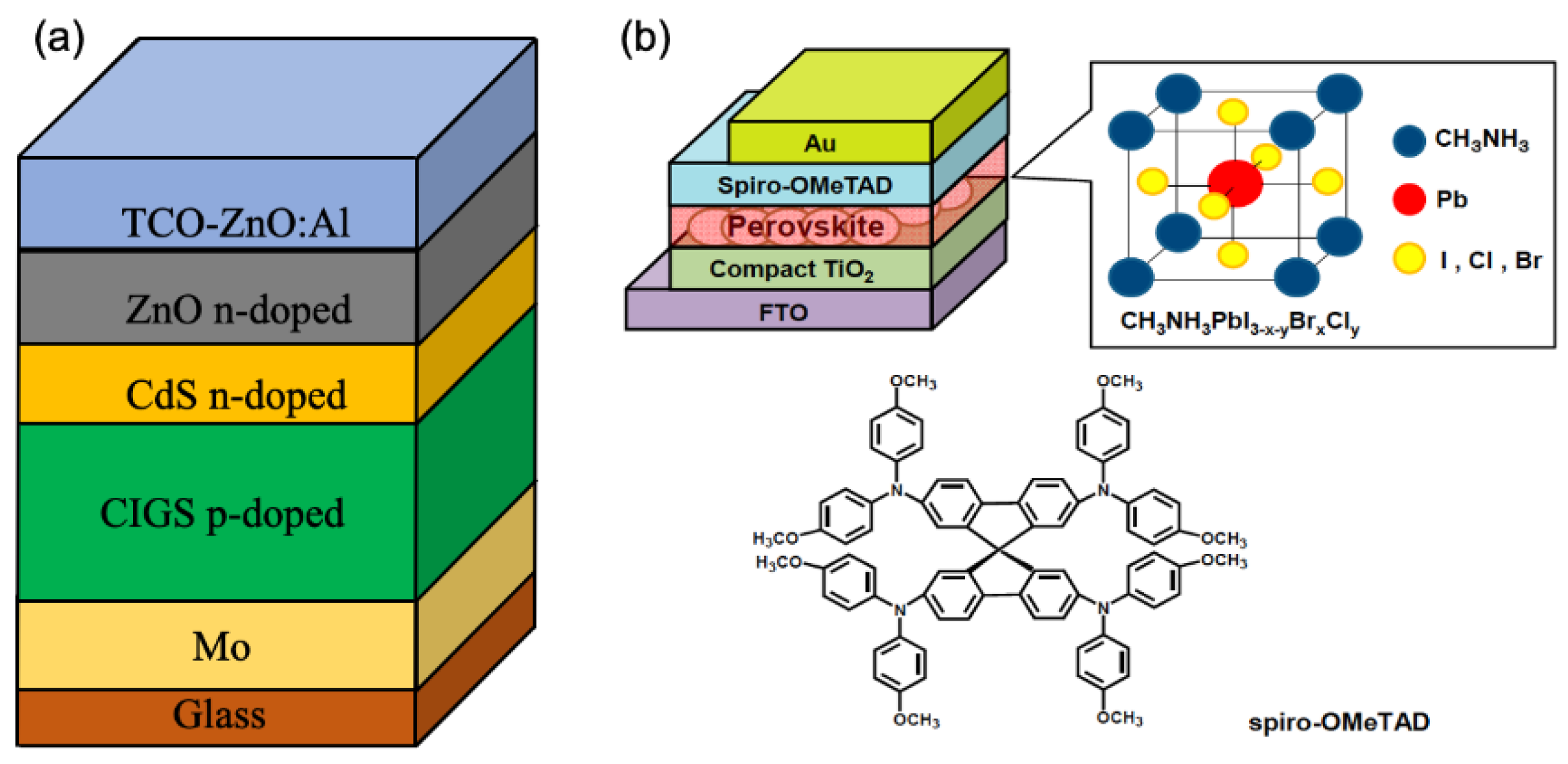
The paper by (N.M. Ravindra) provides a comprehensive overview of Copper Indium Gallium Selenide (CIGS) and Perovskite solar cells (PSCs), two of the most promising thin-film photovoltaic technologies. The chemical structures of CIGS and perovskite solar cells are shown in Figure 13. It highlights their rapid progress, structural characteristics, fabrication methods, and performance trends. CIGS solar cells are known for their high absorption coefficient, tunable bandgap of 1.0–1.7 eV, flexibility, and compatibility with both rigid and flexible substrates. The authors review advances in CIGS fabrication through co-evaporation, precursor annealing, and alkali post-deposition treatments using NaF and KF, which have improved efficiencies beyond 23%. Despite these advantages, challenges remain due to toxic elements (Cd), the reliance on rare materials (In, Ga), and high-temperature processing. Flexible substrates such as polyimide (PI) are discussed as alternatives to soda-lime glass to enable lightweight and bendable devices. In contrast, perovskite solar cells, with the formula ABX₃, have emerged as high-efficiency, low-cost devices capable of exceeding 24% power conversion efficiency (PCE) due to excellent charge transport and tunable bandgaps. The paper reviews progress in halide-based perovskites (e.g., MAPbI₃, FAPbI₃), highlighting their rapid development, structural variations (n-i-p and p-i-n architectures), and improvements through interface engineering, dopant-free hole transport materials (HTMs), and non-fullerene electron transport materials (ETMs). However, perovskites still face major issues of instability, moisture sensitivity, and degradation under light and temperature stress. The authors discuss the roles of series and shunt resistances on performance, emphasizing the need to optimize interfacial layers and minimize recombination losses for scalability. The paper concludes that CIGS and perovskites are complementary technologies poised to compete with traditional silicon solar cells, especially in flexible, lightweight, and tandem configurations. Future improvements depend on enhancing stability, lowering toxicity, and integrating environmentally friendly materials, with tandem CIGS-perovskite systems already demonstrating efficiencies above 24%.
The paper by (Jixiang Zhou) provides a detailed review of the structure, fabrication, and development of Copper Indium Gallium Selenide (CIGS) thin-film solar cells, highlighting their advantages, evolution, and current challenges. CIGS solar cells, first developed in the late 1980s, are known for their high light absorption coefficient, stability, and tunable bandgap, allowing theoretical efficiencies above 20%. The authors explain the fundamental working principle of CIGS cells, focusing on p–n heterojunctions that enhance carrier separation and reduce recombination. The paper discusses the typical device configuration, which includes a molybdenum back electrode, p-type CIGS absorber, CdS buffer, i-ZnO, and Al-doped ZnO (AZO) transparent electrode. It also notes the shift from traditional rigid soda-lime glass substrates to flexible substrates such as polyimide and metal foils to enable lightweight and bendable devices. Various deposition techniques like thermal co-evaporation, selenization, and chemical bath deposition are reviewed, along with efforts to replace toxic CdS buffers with cadmium-free alternatives such as ZnS, ZnSe, In₂S₃, and SnS₂. The paper traces the technological progress from early CuInSe₂ devices with 4.5% efficiency in 1976 to the record 23.4% efficiency achieved by Solar Frontier in 2019, showing major milestones by institutions like NREL, AIST, and EMPA. While rigid glass remains the most efficient substrate type, recent advances have made flexible CIGS devices exceed 20% efficiency, expanding their applicability. The authors also describe the commercialization of CIGS technology, where modules are now mass-produced for both rooftop and flexible photovoltaic applications, though the industrial-scale efficiencies (around 17.4%) still lag behind laboratory results. Key challenges identified include complex manufacturing processes, low industrial yield, toxicity of Cd and Se compounds, and the scarcity and cost of indium and gallium. The paper concludes that future research should focus on low-temperature deposition techniques, eco-friendly materials, and optimization of interface and material performance to enhance both efficiency and sustainability of CIGS thin-film solar cells.
Figure 14.
The fundamental structure of (a) CIGS and (b) Perovskite solar cell with its detailed chemical structure. [From (N.M. Ravindra)].
Figure 14.
The fundamental structure of (a) CIGS and (b) Perovskite solar cell with its detailed chemical structure. [From (N.M. Ravindra)].
1.1. Categories of UAVs powered by solar power
UAVs can be classified into extensive categories based on several aspects such as range, cruise ceiling, payload, take-off weight, purpose, power source and so on. As a superficial picture of the kinds of UAVs that have been integrated with solar power, we have presented comparative charts for the benefit of the reader to comprehend a better picture of the level of work and indulgence in this area of engineering.
Figure 15.
Composition of various applications/ utilities of SPUAVs.
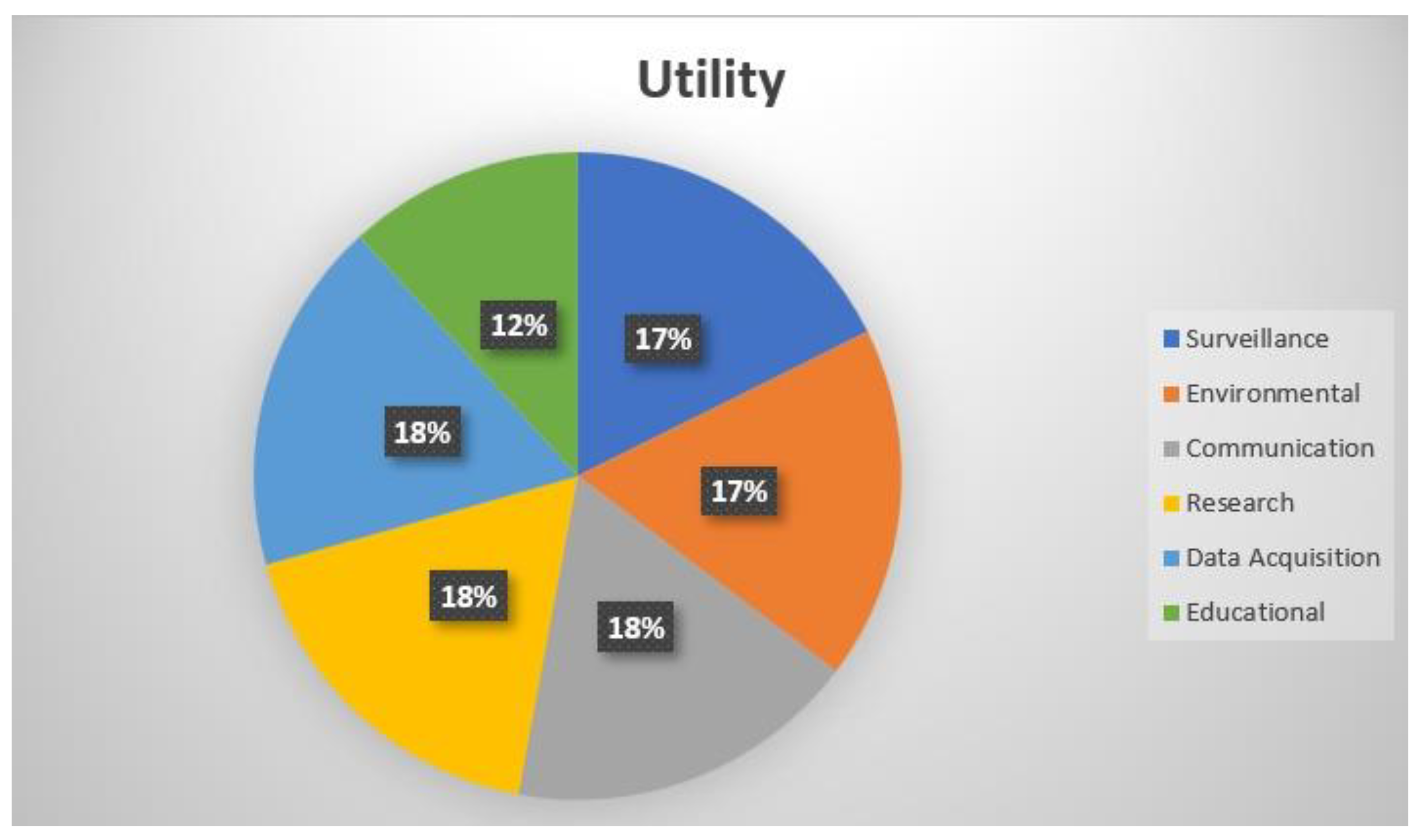
Figure 16.
Composition of SPUAVs based on the mode of take- off/ landing.
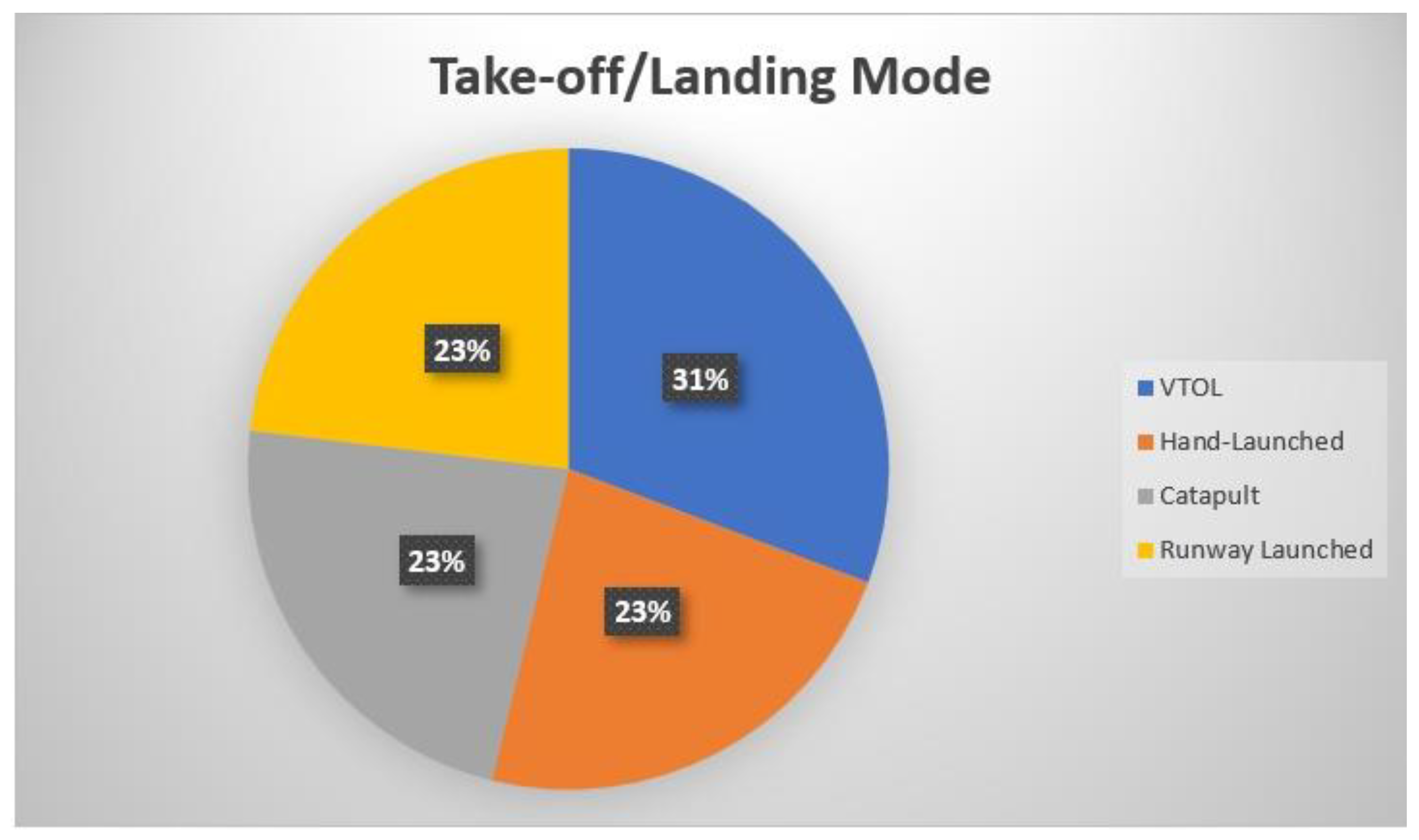
Figure 17.
Composition of SPUAVs based on the rotor configuration.
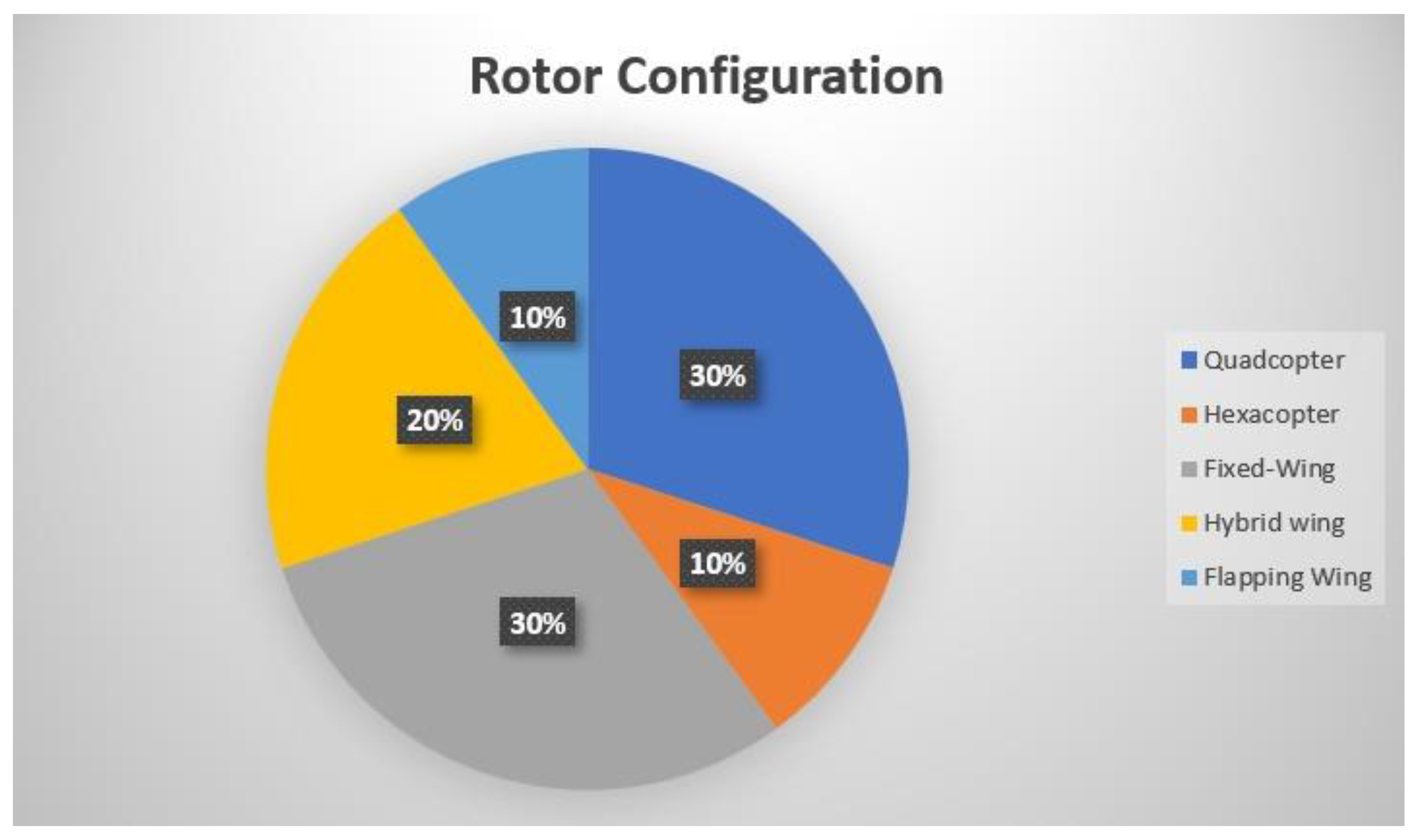
Figure 18.
Composition of SPUAVs based on the total size of the vehicle.
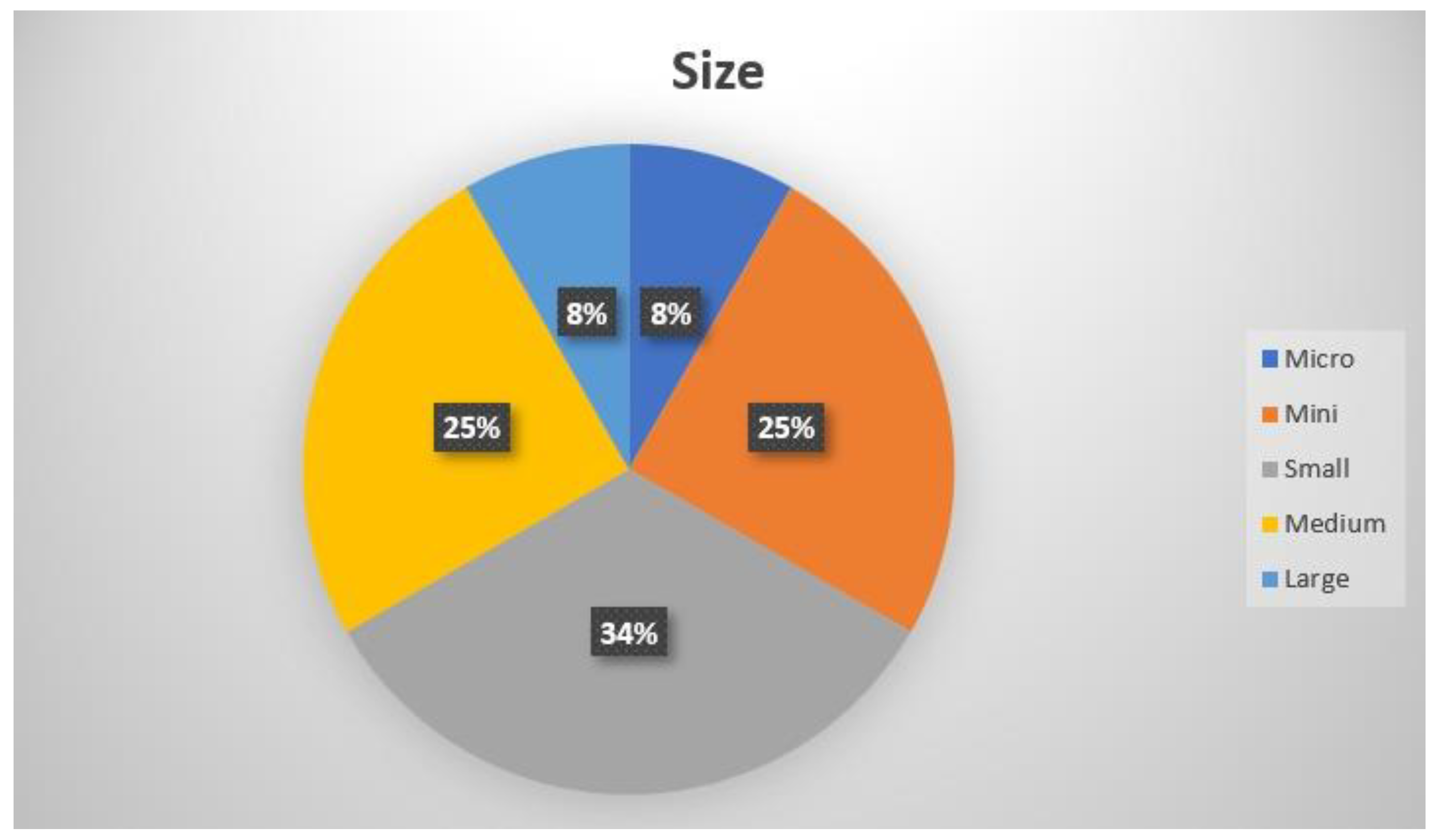
Figure 19.
Composition of the SPUAVs based on the payload size/ mass.
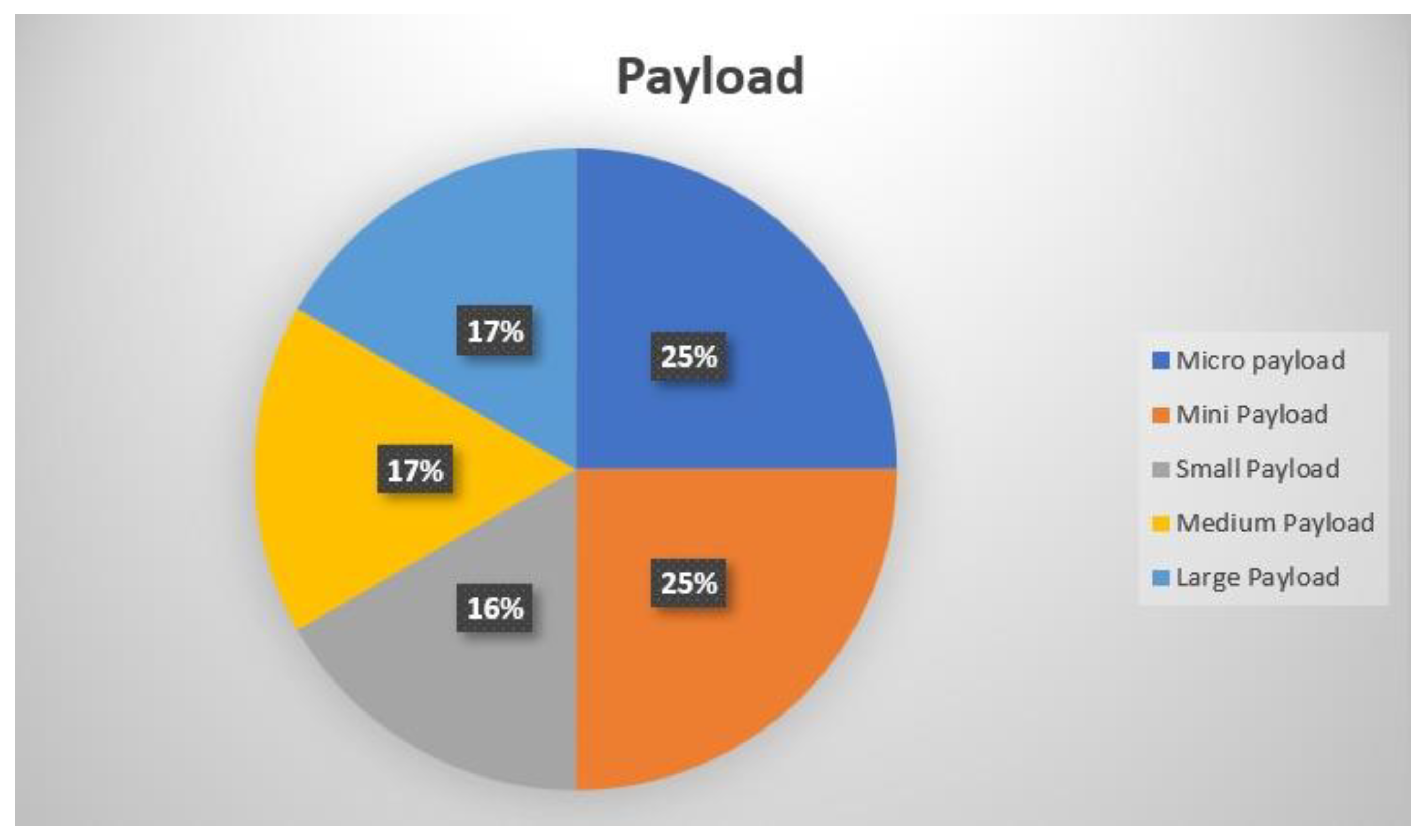
Conclusion
With the extensive review done on various categories of UAVs, kinds of polymer, organic solar cells, we draw desirable conclusions owing to the most important considerations of photovoltaic efficiency of the CIGS solar cells, weight factor, manufacturing considerations. The CIGS has a direct bandgap chalcopyrite absorber with a bandgap range of 1.04eV- 1.68eV, which means that over a 90% of the sunlight that falls on the cell can be absorbed within a few micro meters of the material. With several laboratory CIGS cells achieving over an efficiency of 20% to 23% in converting the solar radiation into electricity, it is indeed a promising candidate for sustainable power source. Also, CIGS cells possess high degradation resistance over time, high operational stability, multi- junction heterostructure, lower negative temperature coefficient than crystalline silicon thus enabling it to produce reliable power during high altitude flight. Owing to the ultra- thin flexible frame of CIGS solar cell, high power per unit area, durability towards high momentum objects such as micro structures, meteorites, the areal mass would not be aerodynamically disadvantageous nor add up considerably to the weight of the whole airframe. Also, CIGS panels are often fabricated as monolithically patterned substrings, eliminating structural members for its rigidity thus saving weight. Since, CIGS are not brittle, and are flexible, there is a relatively higher chance of the being retrieved safe upon the vehicle crashing onto any massive structure or on the ground. Hence, CIGS cells are a promising step to push aviation into attaining sustainability. Overall, the small quantity of toxic material per aircraft and robust design ensure that CIGS panels do not significantly increase the mission risk. There is no volatile organic or radioactive component in the finished cell. Proper encapsulation prevents moisture ingress, so leaching of materials is minimal under normal conditions. Hence, there is much more nuances to be researched and tested in order for CIGS powered solar UAVs to be made fully functional.
Appendix
List of Greek letters:
| Greek Letter | Meaning / Representation |
| η (Eta) | Efficiency |
| λ (Lambda) | Wavelength (commonly used in optical/solar contexts) |
| μ (Mu) | Micro (10⁻⁶), used in micro meters or microns |
| Ω (Omega) | Ohm (unit of resistance symbol, often written as Ω·cm² in SCAPS data) |
List of units:
| Symbol / Unit | Expansion |
| W | Watt |
| kW | Kilowatt |
| mW | Milliwatt |
| Wh | Watt-hour |
| kWh | Kilowatt-hour |
| V | Volt |
| mV | Millivolt |
| A | Ampere |
| mA | Milliampere |
| Ah | Ampere-hour |
| mAh | Milliampere-hour |
| J | Joule |
| eV | Electron volt |
| m² | Square meter |
| W/m² | Watts per square meter |
| Ω·cm² | Ohm-centimeter squared (resistivity) |
| K | Kelvin (temperature) |
| °C | Degree Celsius |
| % | Percent (used for efficiency, fill factor, etc.) |
| μm | Micro meter |
| nm | Nano meter |
| cm² | Square centimeter |
| g | Gram |
| kg | Kilogram |
| rpm | Revolutions per minute |
| m/s | Meters per second |
| ft | Feet |
| hr / h | Hour |
| GW | Gigawatt |
| W/kg | Watt per kilogram |
| W/g | Watt per gram |
| V_bi | Built-in potential (volts) |
List of abbreviations used:
| Abbreviation | Expansion |
| UAV | Unmanned Aerial Vehicle |
| SPUAV | Solar-Powered Unmanned Aerial Vehicle |
| SUAV | Solar Unmanned Aerial Vehicle |
| HALE | High-Altitude Long Endurance |
| HAPS | High-Altitude Pseudo-Satellite |
| RQ-11B | Military Reconnaissance Drone “Raven” |
| CG | Centre of Gravity |
| AUW | All-Up Weight |
| PID | Proportional-Integral-Derivative Controller |
| CDAF | Conceptual Design and Analysis Framework |
| Li-Ion | Lithium-Ion |
| Li-Po / LiPo | Lithium-Polymer |
| Li-S | Lithium-Sulfur |
| BLDC | Brushless Direct Current (Motor) |
| ESC | Electronic Speed Controller |
| BMS | Battery Management System |
| EMS | Energy Management System |
| PMS | Power Management System |
| PM | Power Management |
| MPPT | Maximum Power Point Tracking |
| SOC / SoC | State of Charge |
| RC | Remote Control |
| TX | Transmitter |
| PX4 | Open-source Autopilot Platform |
| PID | Proportional-Integral-Derivative |
| DC | Direct Current |
| AC | Alternating Current |
| PV | Photovoltaic |
| CIGS | Copper Indium Gallium Diselenide / Selenide |
| CdS | Cadmium Sulfide |
| ZnO | Zinc Oxide |
| AZO | Aluminium-doped Zinc Oxide |
| GaAs | Gallium Arsenide |
| CGS | Copper Gallium Selenide |
| GnP | Graphene Nanoplatelets |
| MBA | Methylbenzyl Ammonium |
| PI | Polyimide |
| HTM | Hole Transport Material |
| ETM | Electron Transport Material |
| PCE | Power Conversion Efficiency |
| PDT | Post-Deposition Treatment |
| NaF / KF / RbF / CsF | Sodium / Potassium / Rubidium / Cesium Fluoride |
| CGI | Copper–Gallium–Indium Ratio |
| GGI | Gallium–Grading Index |
| BSF | Back Surface Field |
| STC | Standard Test Conditions |
| CFD | Computational Fluid Dynamics |
| SLR | Systematic Literature Review |
| ACO | Ant Colony Optimization |
| ES-TNF-ACO | Elite Strategy–Target Node Factor–Ant Colony Optimization |
| MATLAB | Matrix Laboratory |
| SCAPS | Solar Cell Capacitance Simulator |
| Pymo | Python Modeling Library |
| OF | Objective Function |
| GPS | Global Positioning System |
| IMU | Inertial Measurement Unit |
| FPV | First Person View |
| Wi-Fi | Wireless Fidelity |
| LiDAR | Light Detection and Ranging |
| UV | Ultraviolet |
| Voc / V_OC | Open Circuit Voltage |
| Jsc / J_SC | Short Circuit Current Density |
| FF | Fill Factor |
| QE | Quantum Efficiency |
| η | Efficiency (Greek letter Eta) |
| V_bi | Built-in Potential |
| LCOE | Levelized Cost of Energy |
References
- Khamisa, N. R. (n.d.). Absorber layer improvemnet and performance analysis of CIGS thin film solar cell.
- A.M. Ferouani, M. M. A.M. Ferouani, M. M. (n.d.). Temperature Effect of Electrical Properties of CIGS Solar Cell.
- Aly Abidali, S. A. (n.d.). Developement of a Solar Powered Multirotor Micro Aerial Vehicle.
- Asutosh Pati, D. D. (n.d.). Unmanned Aerial Vehicle Using Solar Power.
- Bekele Hailegnaw, S. D. (n.d.). Flexible Quasi-2D perocskite solar cells with high specific power and improved stability for energu autonomous drones.
- Caner İLHAN, Z. C. (n.d.). Solar-Powered UAV: A Novel Approach to Conceptual Design.
- Chencehn Zhao, S. y. (n.d.). Advances in CIGS thin film solar cells with emphasis on the alkali element post-deposition treatment.
- Daning Hao, L. Q. (n.d.). Solar Energy harvesting technologies for PV self-powered applications : A comprehensive review.
- Dr. Raghvendra Tiwari, P. B. Dr. Raghvendra Tiwari, P. B. (n.d.). Solar Energy Integration in UAV.
- Sharma, V. Solar Powered QuadCopter Drone. Int. J. Res. Appl. Sci. Eng. Technol. 2024, 12, 3926–3930. [Google Scholar] [CrossRef]
- Farid Ibrahim, Z. Y. (n.d.). The Effect of Use of Solar Panels on Miceo-scale Fixed-wing UAV as a Power Recharging System.
- Figliozzi, M.A. Lifecycle modeling and assessment of unmanned aerial vehicles (Drones) CO2e emissions. Transp. Res. Part D Transp. Environ. 2017, 57, 251–261. [Google Scholar] [CrossRef]
- Franklin Salazar, M. S.-G. (n.d.). Optimization of the solar energy storage capacity for a monitoring UAV.
- H. Hrauda, X. L. H. Hrauda, X. L. (n.d.). Integration of Micro-Structured Photovolatic Cells into the Ultra-Light Wing structures for Extended Range Unmanned Aerial Vehicles.
- Hareesha N G, L. K. (n.d.). Solar-Powered Drone for Extended Flight Time.
- Hurd, W. R. (n.d.). Application of Copper Indium Gallium Diselenide Photovoltaic Cells to Extend the Endurance and Capabilities of Unmanned Aerial Vehicles.
- J. Shri Saranyaa, P. F. J. Shri Saranyaa, P. F. (n.d.). A comprehensive Survey on the Current Trends in Improvising the Renewable Energy Incorporated Global Power System Market.
- Jackson Liller Rishabh Goel, A. A. (n.d.). Developement of a battery free, solarpowered,and energy aware fixed wing unmanned aerial vehicle.
- Jessa, W. W. (n.d.). Selection of Solar Powered Unmanned Aerial Vehicles for a Long-Range Data Acquisition Chain.
- Jixiang Zhou, C. L. (n.d.). Research on Copper Indium Gallium Selenide (CIGS) Thin - Film Solar cells.
- Carmo, J.E.; Torres, J.P.N.; Cruz, G.; Lameirinhas, R.A.M. Effect of the Inclusion of Photovoltaic Solar Panels in the Autonomy of UAV Time of Flight. Energies 2021, 14, 876. [Google Scholar] [CrossRef]
- Joar Johansson, U. Z. (n.d.). Modelling and Optimization of CIGS Modules.
- Sri, K.R.B.; Aneesh, P.; Bhanu, K.; Natarajan, M. Design Analysis of Solar-Powered Unmanned Aerial Vehicle. J. Aerosp. Technol. Manag. 2016, 8, 397–407. [Google Scholar] [CrossRef]
- Keerthana Reghunath, d. N. (n.d.). a Desigm of Solar Powered Unmanned Aerial Vehicle.
- Krzysztof Sornek, J. A.-N. (n.d.). Status and Development prospects of Solar-Powered Unmanned Aerial Vehicles - A Literature Review.
- Luqman Sulaiman Al Dhafari, O. A.-A. (n.d.). Solar-Powered UAVs (SPUAVs): Strategic Systemic Literature Analysis.
- Matias Alegre Maurer, A. S. (n.d.). Evaluating autonomous perovskite solar drones for use in remote areas.
- Md. Ferdous Rahman, M. K.-H. Md. Ferdous Rahman, M. K.-H. (n.d.). A qualitative Design and optimization of CIGS-based Solar Cells with Sn2S3 Back Surface Field: A plan for achieving 21.83 % efficiency.
- Mrs. M. Uma Mythraye, C. L. Mrs. M. Uma Mythraye, C. L. (n.d.). Solar Wing Drone.
- N.M. Ravindra, L. l. N.M. Ravindra, L. l. (n.d.). CIGS and Perovskite Solar Cells- An Overview.
- Аzerbaijan National Aerospace Agency; Huseynov, O. A. Flight optimization of a solar-powered unmanned aerial vehicle in descent mode. Aerosp. Eng. Technol. 2025, 3. [Google Scholar] [CrossRef]
- Ionescu, O.N.; Cernica, I.; Manea, E.; Parvulescu, C.; Istrate, A.; Ionescu, G.; Suchea, M.P. Integration of Micro-Structured Photovoltaic Cells into the Ultra-Light Wing Structure for Extended Range Unmanned Aerial Vehicles. Appl. Sci. 2021, 11, 10890. [Google Scholar] [CrossRef]
- Philipp Oettershagen, a. m. (n.d.). Design of small hand - launched solar-powered UAVs: From concept study to a multi-day world endurance record flight.
- S. Sathishkumar, M. K. S. Sathishkumar, M. K. (n.d.). Development of Solar Drone for Surveillance.
- Tomar, R. S. (n.d.). Energy Efficient Solar powered UAV.
- UAV, E. e. (n.d.).
- Zhonghua Hu, S. L. (n.d.). Research on Route Planning for Solar UAV Based on the Intelligent Optimization Algorithm.
Figure 1.
PV cell and battery integration [From (Dr. Raghvendra Tiwari)].
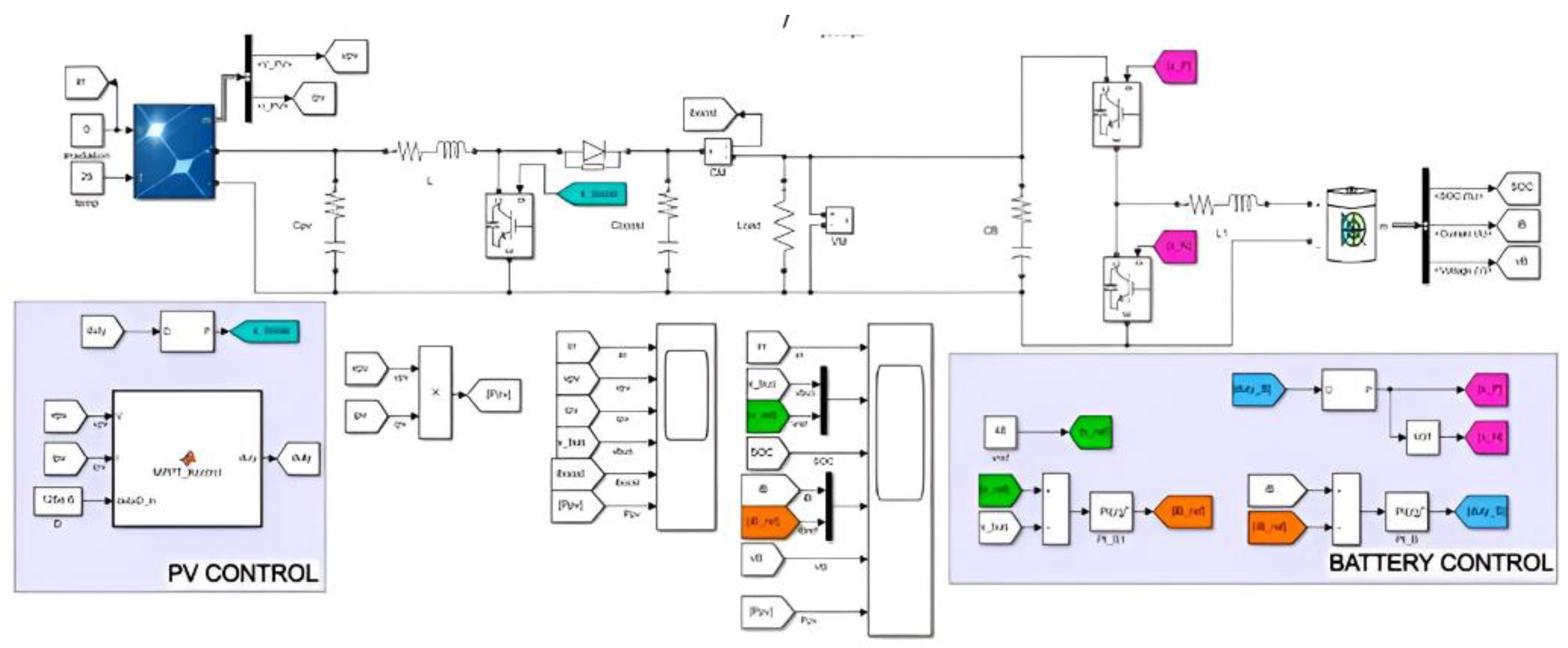
Figure 2.
Solar powered UAV model [From (Tomar)].

Figure 4.
Drone frame of the Solar drone for surveillance [From (S. Sathishkumar)].

Figure 5.
Draft model of the UAV [From (Karthik Reddy Buchireddy Sri)].
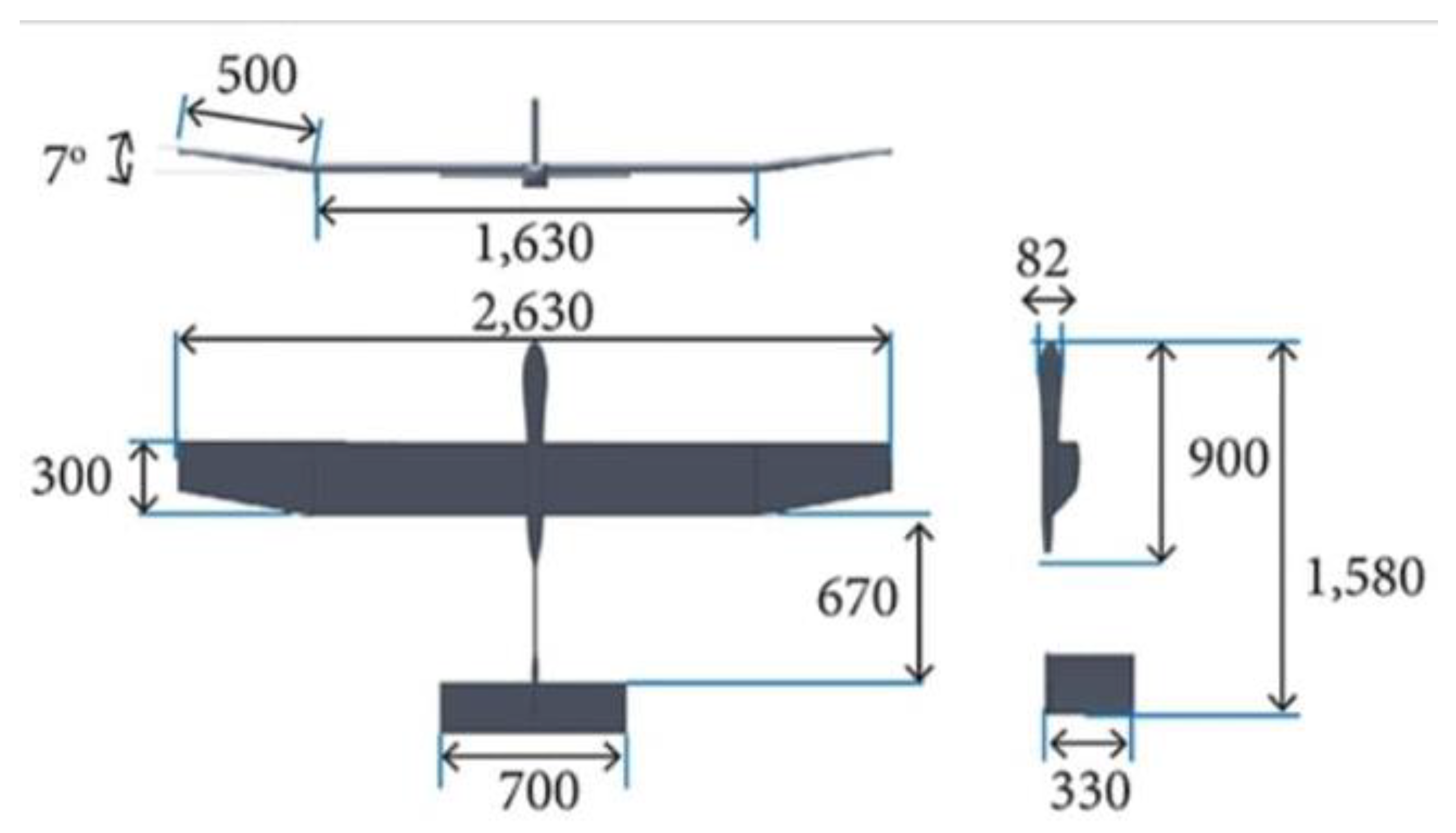
Figure 6.
The solar powered fixed UAV developed [From (Jackson Liller Rishabh Goel).

Figure 7.
A summarizing overview of the design process of a SPUAV.
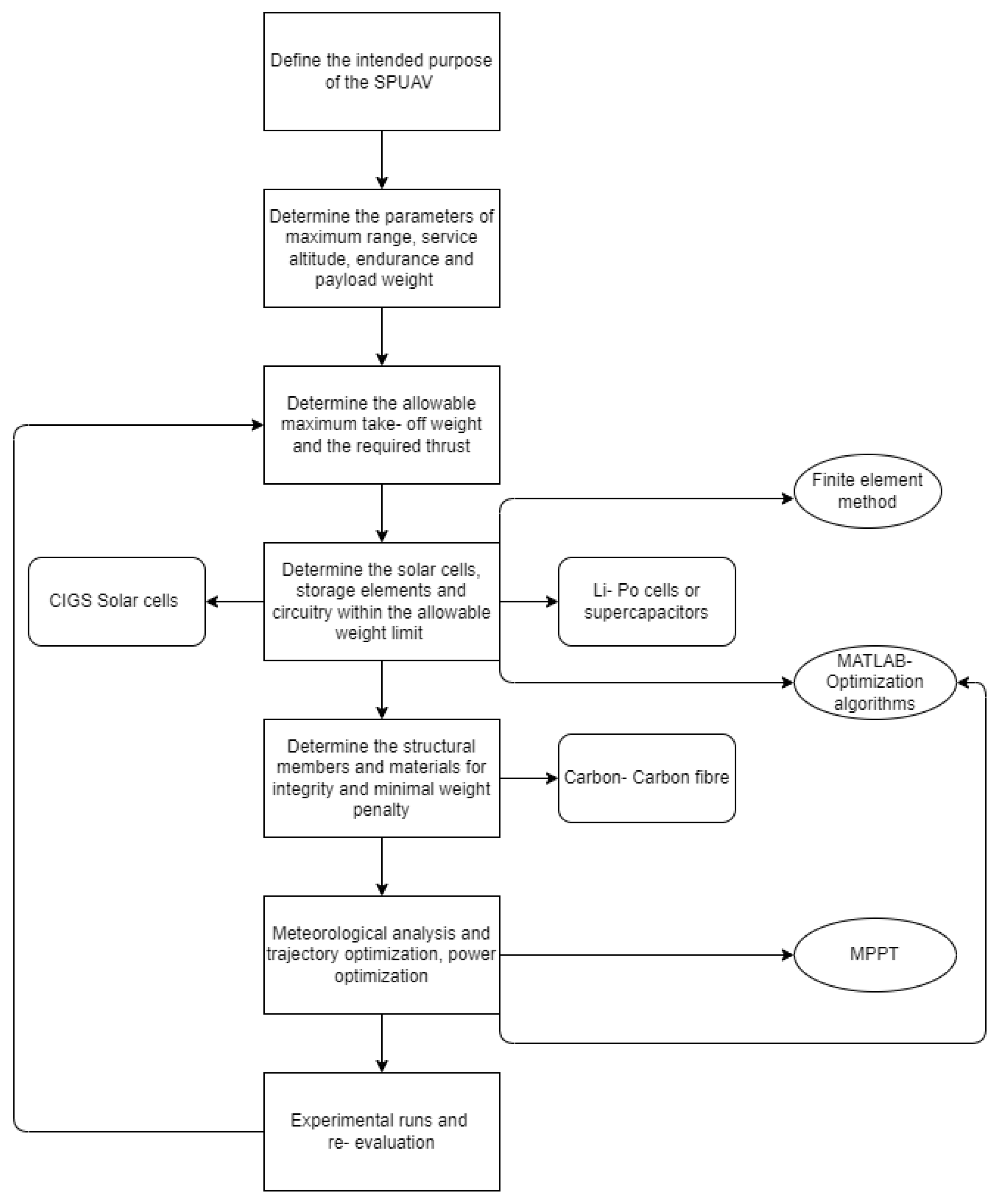
Figure 8.
Costs and Efficiencies of Photovoltaic Technology Generations [From (Hurd)].
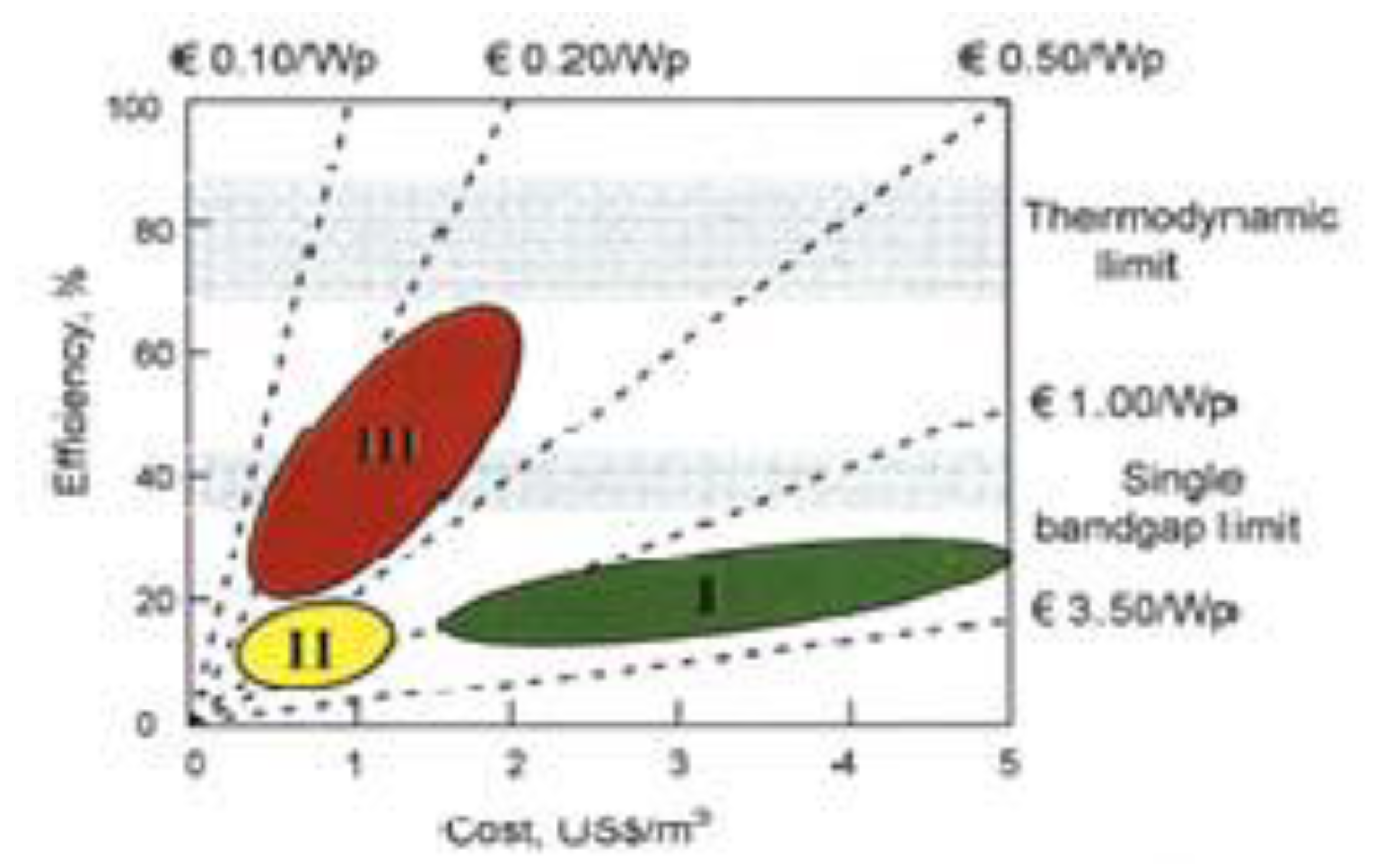
Figure 9.
Typical CIGS Construction [From (Hurd)].
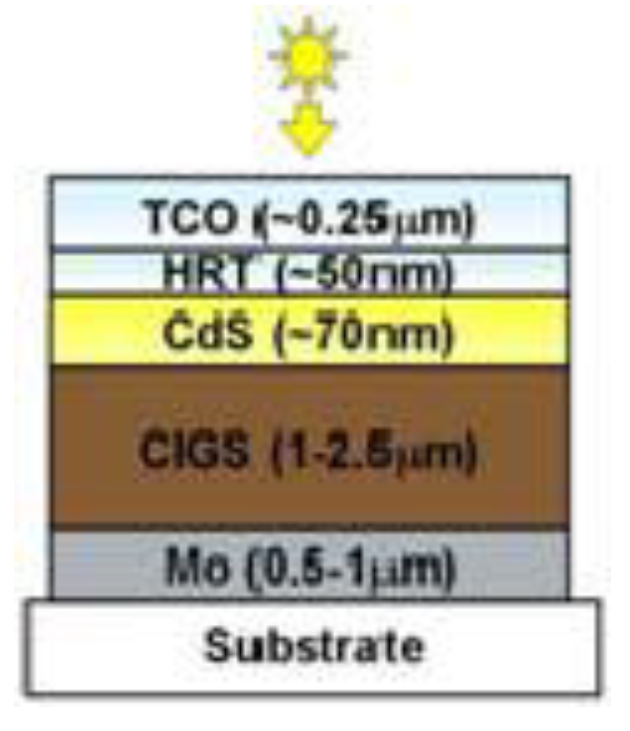
Figure 10.
Possible Additional Surface Area for Solar Cells on RQ-11 Raven [From (Hurd)].
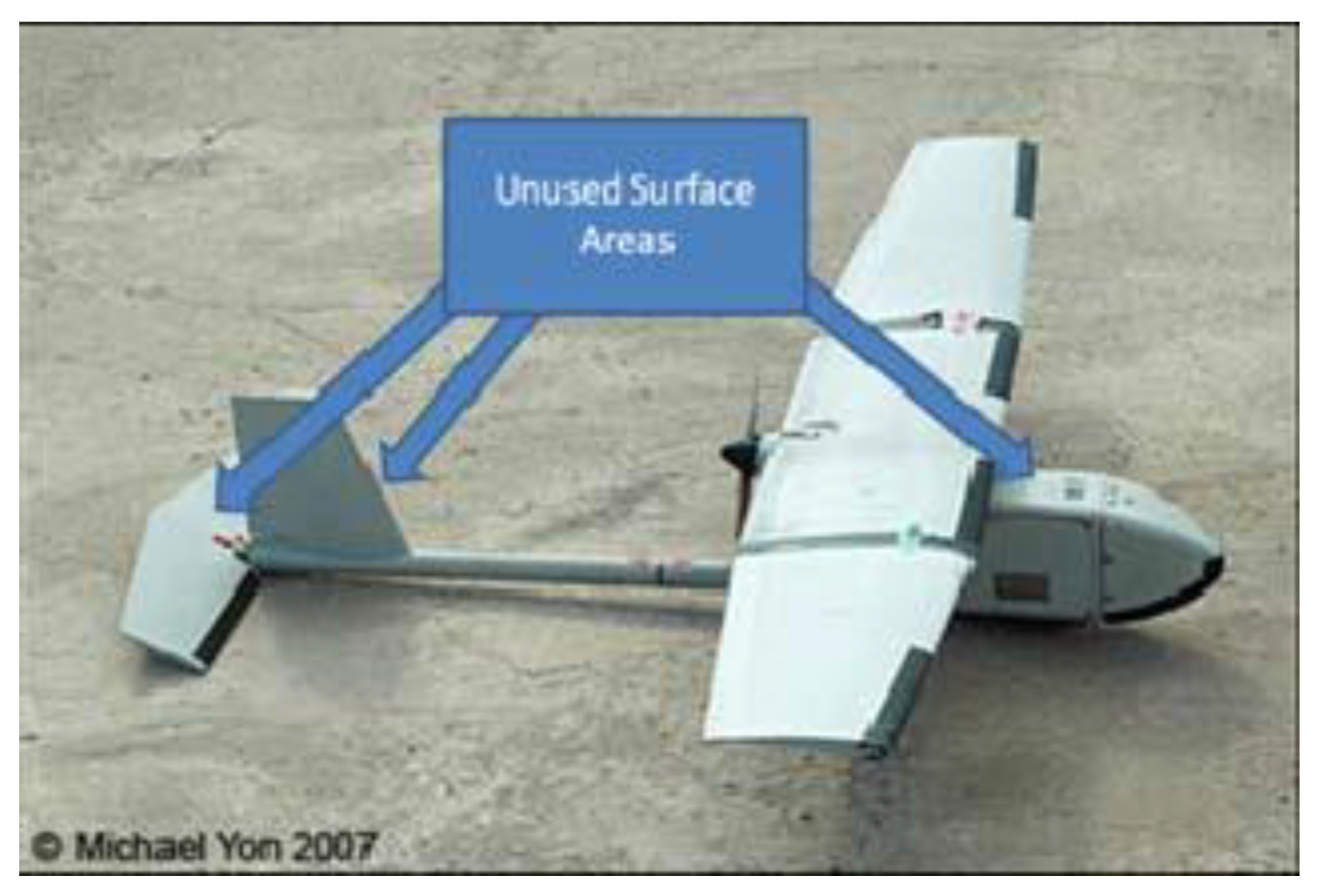
Figure 11.
Assembled Thin-Film Flyer with Canopy Closed [From (Hurd)].

Figure 12.
J–V characteristics of solar cell with variable the temperature of CIGS [From (A.M. Ferouani)].
Figure 12.
J–V characteristics of solar cell with variable the temperature of CIGS [From (A.M. Ferouani)].
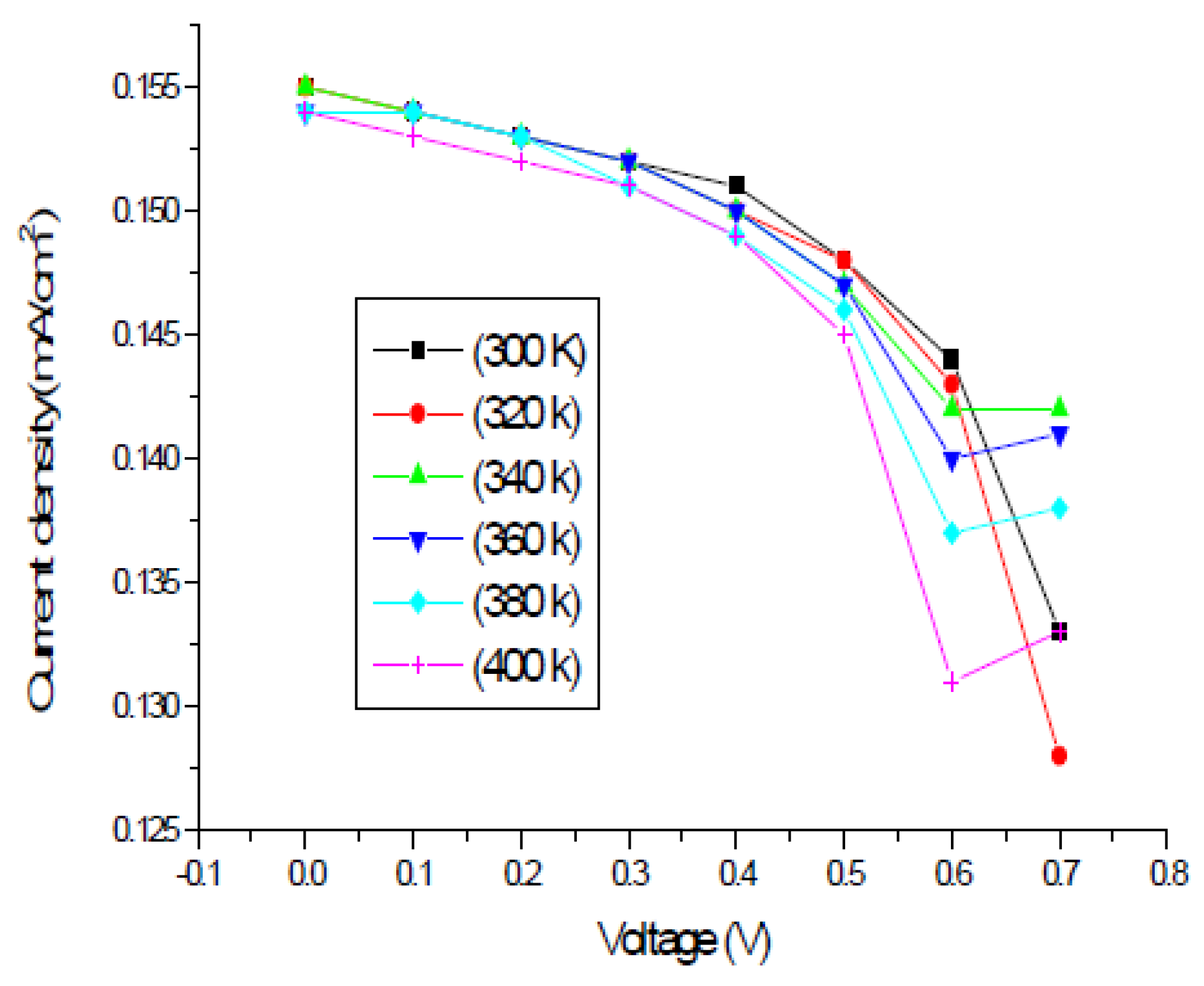
Figure 13.
Laboratory efficiency progress in the CIGS solar cell from 1975 to 2022. [From (Chencehn Zhao)].
Figure 13.
Laboratory efficiency progress in the CIGS solar cell from 1975 to 2022. [From (Chencehn Zhao)].
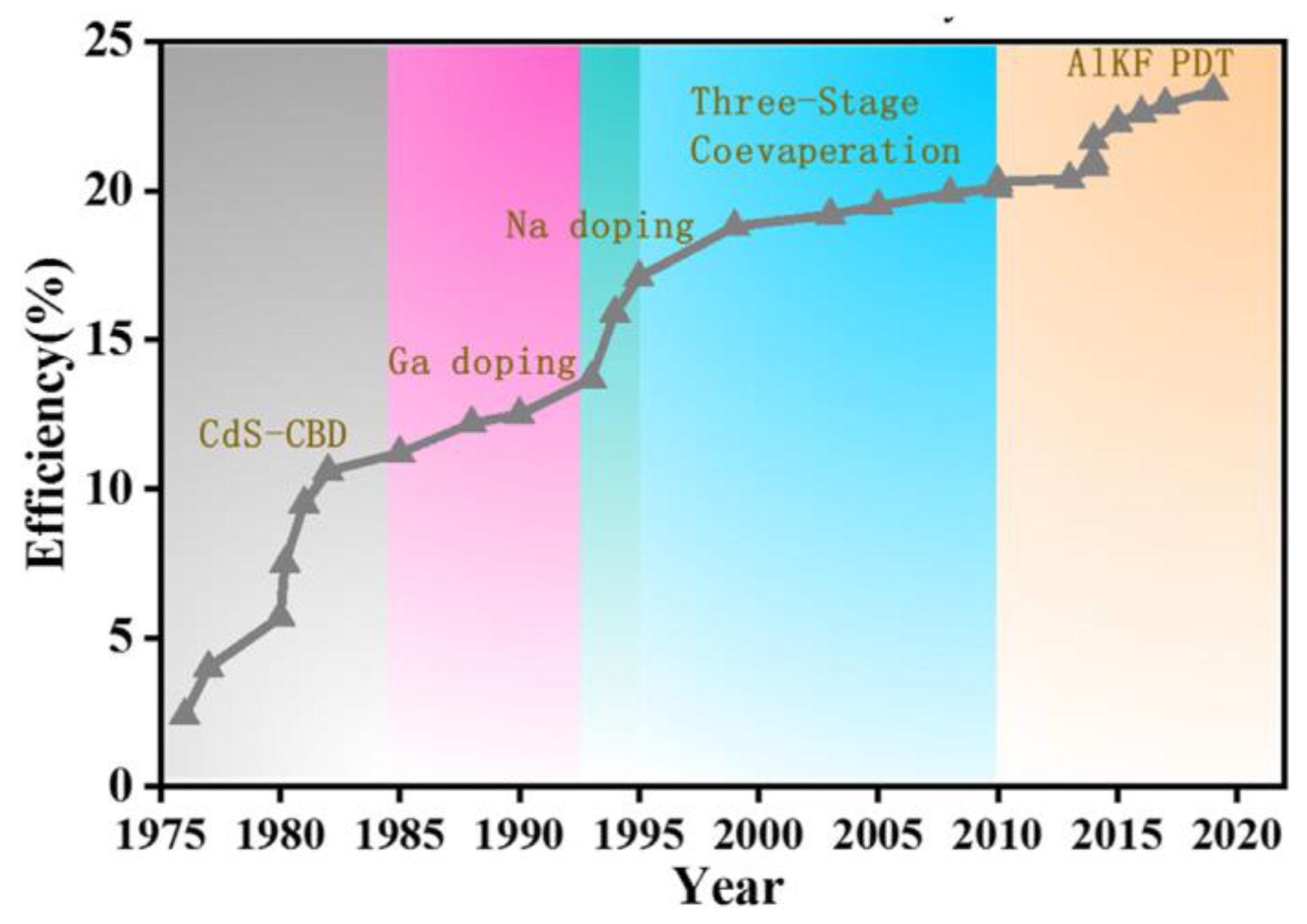
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



