Submitted:
13 September 2025
Posted:
17 September 2025
You are already at the latest version
Abstract
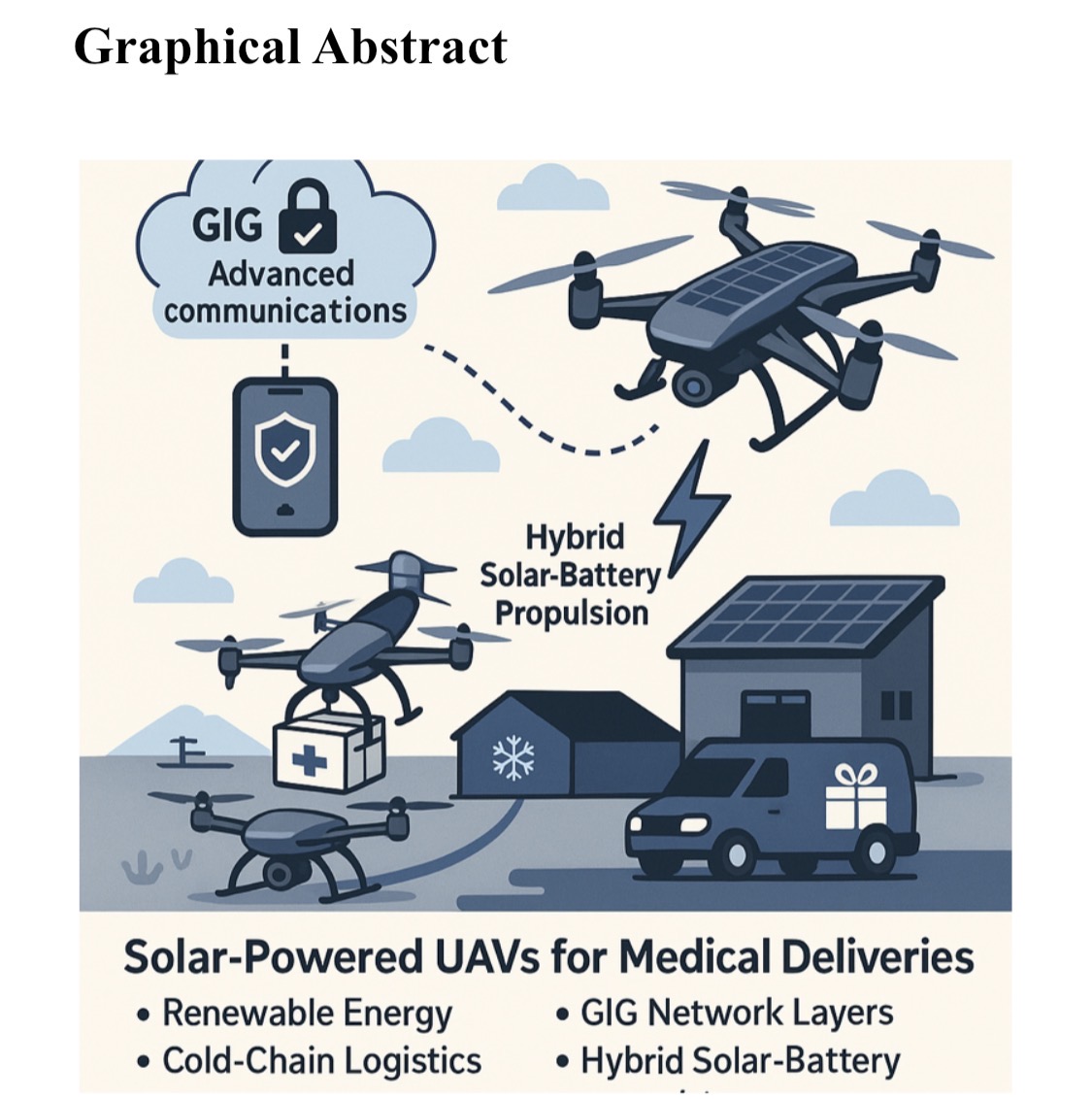
The increasing demand for reliable, rapid, and sustainable last-mile medical deliveries has accelerated the adoption of unmanned aerial vehicle (UAV) technologies. This study proposes a solar-powered UAV system architecture that integrates Global Information Grid (GIG) network layers and cold-chain logistics for the safe transportation of blood, vaccines, biologics, and emergency medication. The architecture combines tiered UAV fleets, a hybrid solar-battery propulsion system, advanced communications, and cloud-based Zero-Trust integration for secure and traceable deliveries. A power-sizing model is presented, showing how solar energy harvest can support autonomous operations with minimal downtime, achieving over 95% operational availability. These results demonstrate the potential of renewable energy UAVs to enhance global health logistics and align with BVLOS operations, WHO PQS standards, and international safety guidelines, with future work exploring scalability and deployment in diverse environments.
Keywords:
Solar UAV
; Cold Chain Logistics
; GIG Integration
; Medical Drone Delivery
; BVLOS Operations
; Renewable Energy UAVs
; Medical Errors
1. Introduction
1.1. Importance
A reliable and rapid delivery of critical medical supplies, including vaccines, blood products, and emergency medications, is fundamental to global health resilience, particularly in underserved areas with limited infrastructure. UAVs, especially when powered by renewable energy, offer a promising solution to these last-mile delivery challenges (Jairoun et al., 2025; Bhattacharya et al., 2025). Integrating solar-powered UAVs with advanced digital networks such as the Global Information Grid (GIG) can further enhance delivery reliability and security (Sornek et al., 2025).
1.2. Background
There are many challenges and hurdles in the operation of drones for tasks such as continuous weather monitoring (Maxime et al., 2023), security patrols surveillance, and emergency medical deliveries, especially BVLOS. Solar-powered UAVs extend operational endurance by harvesting solar energy mid-flight. This reduces dependency on ground charging infrastructure (Khan & Anwar, 2023; Abdulrahman et al., 2025).
Medical drone delivery programs in Rwanda and Ghana have successfully transported vaccines and blood, demonstrating speed and reliability gains (Aggarwal et al., 2023). However, existing systems primarily rely on batteries and face limitations in range, cold-chain management, and secure communications. This persistent problem necessitates a hybrid UAV system for long-distance endurance.
1.3. Problem Statement
Current UAV-based medical delivery systems remain fragmented, with challenges such as limited flight endurance, insufficient cold-chain integrity, and vulnerable communication links (Pamula et al., 2025). There is a lack of holistic architecture that integrates solar energy harvesting, secure GIG-based communication, and WHO PQS-compliant cold-chain logistics.
In several studies comparing unmanned aerial vehicles (UAVs) with ground delivery systems for transporting blood products such as platelets and plasma, significant challenges have been identified related to drone battery sustainability. These challenges directly affect performance during long-distance flights and can delay the timely delivery of critical medical supplies needed for emergency surgeries and life-saving procedures (Homier et al., 2021; Bertran & Sanchez-Cerda, 2016).
If these battery-related issues are not addressed, they could lead to unexpected complications and potentially fatal outcomes. To mitigate these risks, our study focuses on a solar-powered UAV system capable of restoring and harnessing renewable energy while in transit. This design innovation ensures that critical medical supplies, including blood, tissue samples, and organs such as hearts for transplant, are delivered promptly and reliably (Gunaratne et al., 2022; Aggarwal et al., 2024).
The proposed UAV architecture integrates advanced sensors and internal components to automatically switch between a draining battery and stored reusable solar energy. This seamless transition ensures that delivery schedules remain uncompromised, while also adhering to the highest safety and operational standards (Hwang et al., 2018; Häusermann et al., 2023). Other vital features include cameras, GPS, and WiFi, which are essential for UAV cooperative shared vision tasks.
By combining renewable solar energy with smart energy management, this system is designed to endure extended aerial flights, providing a robust solution for medical logistics and emergency healthcare services (Pamula et al., 2024). Ultimately, this approach improves reliability, reduces the risk of power failure, and expands access to critical medical resources in both urban and remote locations (Eksioglu et al., 2024; Zaffran et al., 2013).
Figure 1.
Solar-Powered UAV with Smart Energy Management for Medical Deliveries.
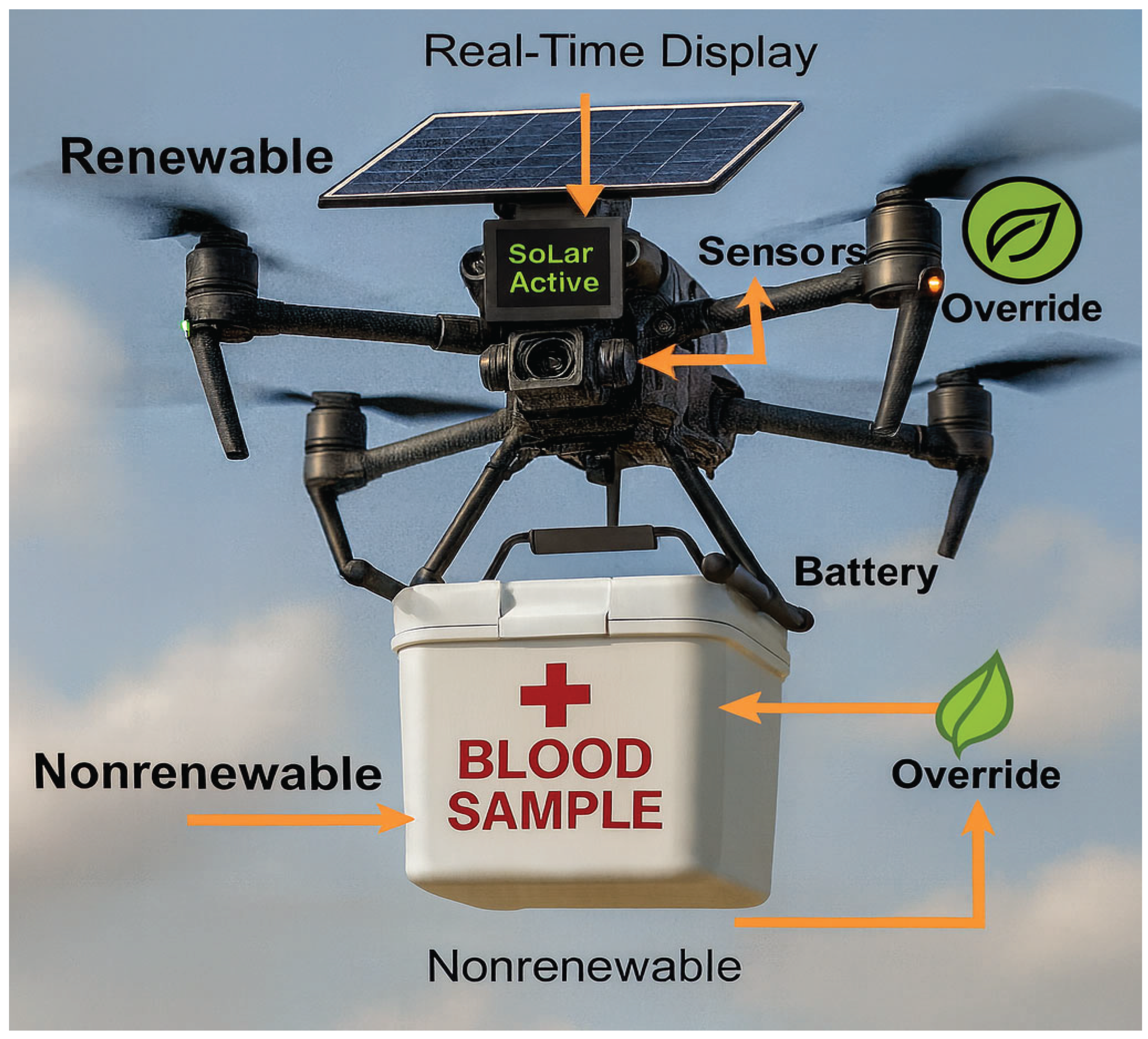
The diagram illustrates a drone designed for the rapid delivery of critical medical blood, tissues, and organs. The system integrates a solar panel for renewable energy generation, a real-time display for monitoring, and sensors to manage automatic switching between solar power and battery reserves. The bidirectional energy flow enables seamless transitions between stored renewable energy and non-renewable battery power, preventing delivery delays. An override system provides fail-safe landing and operational redundancy for critical missions, while smart energy management ensures long-duration flights. This UAV architecture is optimized to maintain continuous flight during emergencies, supporting the timely and safe delivery of medical resources in both urban and remote settings.
1.4. Research Gap
Most studies focus on isolated aspects of UAV routing, solar charging strategies, or logistics for medical supplies, but fail to address a unified system. This research proposes a comprehensive architecture combining hybrid solar-battery propulsion, GIG-enabled secure communications, and WHO PQS-compliant cold-chain systems for BVLOS operations.
1.5. Evidence
The use of drone delivery networks has significantly transformed healthcare logistics in low-resource regions, particularly in Africa. Recent studies have documented how UAVs have accelerated the distribution of vaccines, blood products, and other essential medical supplies, reducing delivery times by up to 70% compared to traditional ground transportation (Aggarwal et al., 2024; Gauba et al., 2025). These systems have also demonstrated improvements in cold-chain reliability by minimizing temperature excursions during last-mile delivery, which is critical for maintaining the potency of temperature-sensitive biologics such as vaccines and insulin.
Emerging research on solar-powered UAVs has further expanded the scope of aerial logistics. Studies on UAV path planning and trajectory optimization show that energy harvesting from solar panels can extend flight endurance, enabling missions that would otherwise be constrained by battery capacity (Sornek et al., 2025). This advancement is especially relevant in remote and rural areas, where charging infrastructure is sparse or unreliable.
Additionally, modeling studies have highlighted the cost-effectiveness of UAV-enabled logistics, showing that they can significantly enhance immunization coverage while maintaining operational sustainability. Ospina-Fadul et al. (2025) demonstrated that in areas with difficult terrain and poor road access, UAVs reduced the per-unit cost of vaccine delivery and increased overall population coverage by more than 30%, making them a viable alternative to conventional transportation methods. These findings collectively provide strong evidence for the use of UAVs in national healthcare logistics systems, particularly when coupled with renewable energy solutions for long-term scalability.
1.6. Local Context
In rural Sub-Saharan Africa, healthcare supply chains face persistent challenges due to fragile infrastructure, including unreliable electricity grids and limited road connectivity. This issue typically resonates with the South African context of unstable electricity. These barriers hinder the maintenance of cold-chain standards, which are essential for preserving the efficacy of vaccines and other sensitive biological products. For instance, temperature fluctuations caused by power outages can compromise vaccine quality, leading to wastage and reduced immunization effectiveness.
To address these challenges, international organizations such as Gavi, the Vaccine Alliance, and the World Health Organization (WHO) have piloted integrated solutions combining solar-powered storage systems with UAV-based delivery platforms. A notable example is the Wingcopter project in Ghana, which demonstrated how hybrid solar-UAV systems could maintain cold-chain integrity while ensuring timely delivery to remote clinics and communities (WHO, 2024; WHO, 2025). These initiatives have proven particularly valuable during public health crises such as the COVID-19 pandemic, where rapid and reliable distribution of vaccines was critical to saving lives.
The Ghanaian experience indicates the potential of combining solar energy with UAV technology to create resilient healthcare logistics networks. However, scaling these solutions require careful alignment with national policies, community engagement, and international regulatory frameworks concerning Beyond Visual Line of Sight (BVLOS) operations and airspace safety.
1.7. Study Objectives
This study seeks to design and evaluate a solar-powered UAV architecture tailored to the unique logistical and regulatory challenges of rural Sub-Saharan Africa. The primary objectives are as follows:
- 1.
-
Integrate Hybrid Solar-Battery PropulsionDevelop and test a propulsion system that combines solar energy harvesting with battery storage to significantly extend UAV endurance and minimize downtime between missions.
- 2.
-
Develop a Tiered UAV Fleet ArchitectureDesign a multi-tier fleet system capable of handling diverse payload capacities, ranging from small, lightweight vaccine packages to larger biologic shipments, while optimizing cost and operational efficiency.
- 3.
-
Implement GIG-Based Communication LayersIncorporate Global Information Grid (GIG) network layers to enable secure, real-time tracking and traceability of deliveries, ensuring accountability and data integrity.
- 4.
-
Ensure WHO PQS-Compliant Cold-Chain ManagementAlign UAV-based cold-chain operations with WHO Performance, Quality, and Safety (PQS) standards to maintain vaccine integrity throughout the distribution process.
- 5.
-
Model Power-Sizing for >95% Operational AvailabilityUtilize simulation models to optimize solar panel configurations and battery capacity, targeting an operational availability rate exceeding 95%, even under variable weather conditions.
- 6.
-
Align with BVLOS Regulatory RequirementsEnsure that UAV operations comply with local and international BVLOS flight regulations, including remote identification, geofencing, and detect-and-avoid (DAA) systems.
Figure 2 depicts the conceptual UAV Architecture. An integrated UAV system for medical logistics, showcasing solar-battery propulsion, cold-chain payload management, and secure GIG-based communication layers for real-time monitoring and coordination.
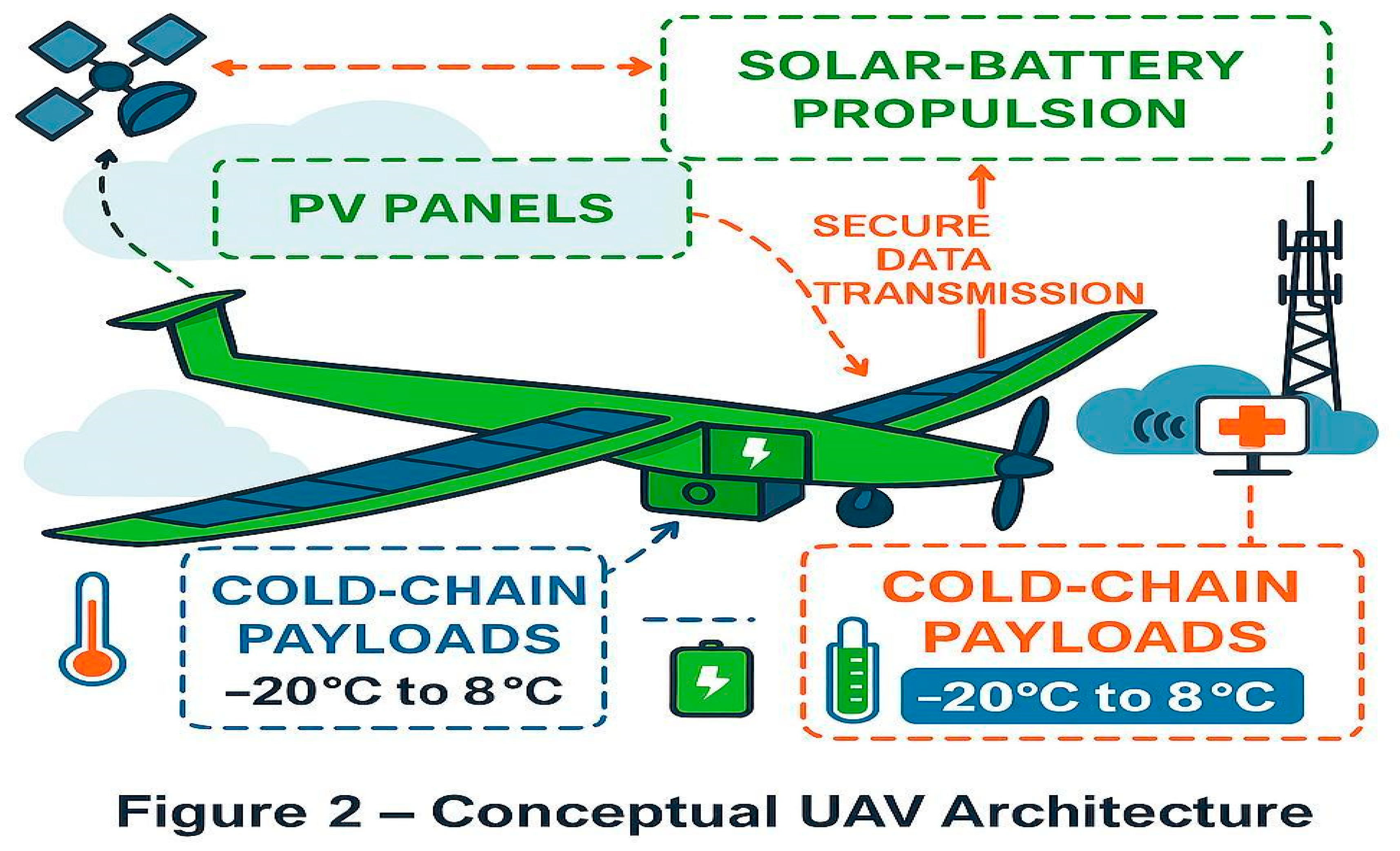
We demonstrate in Figure 2 how a solar-powered unmanned aerial vehicle (UAV) design can be conceptualized for last-mile medical deliveries. Our emphasis on sustainability, temperature-sensitive transport, and secure data communications guarantees UAVs' long continuous endurance flight capability. It is worth briefly explaining the importance of the three color-coded zones in design architecture.
- 1.
- Solar-Battery Propulsion System (Green Zone)
- o
- The UAV is equipped with photovoltaic (PV) panels on its wings, allowing for renewable energy harvesting during flight.
- o
- Excess energy is stored in onboard battery units, ensuring continuous operation even during low-light conditions or extended missions.
- o
- This hybrid propulsion system reduces reliance on fossil fuels and enables longer endurance flights, crucial for remote or disaster-hit areas.
- 2.
- Cold-Chain Payload Management (Blue Zone)
- o
- The UAV features temperature-controlled compartments with an operating range of –20°C to 8°C, compliant with WHO guidelines for transporting vaccines, blood, and biologics.
- o
- Thermometer indicators emphasize the role of real-time monitoring to maintain vaccine efficacy and product integrity during transportation.
- o
- The dual payload compartments allow simultaneous delivery of multiple medical supplies, improving delivery efficiency.
- 3.
- GIG-Based Secure Communication (Orange Zone)
- o
- The Global Information Grid (GIG) layer integrates satellite and ground-based communication nodes, enabling real-time UAV tracking and secure data exchange.
- o
- Secure data transmission ensures that sensitive medical and logistical data remain protected against cyber threats, complying with healthcare data privacy regulations.
- o
- The UAV communicates directly with ground control stations and cloud-based health systems, facilitating coordinated responses during emergencies or outbreaks.
1.8. System Design Architecture: Significance and Benchmark Alignment
This UAV system design aligns with global health initiatives by the WHO and Gavi, aiming to improve vaccine accessibility and emergency response in rural and underserved regions, particularly in Sub-Saharan Africa and other low-resource settings. It highlights how UAVs can revolutionize medical supply chain logistics in the following ways.
- Sustainability: By leveraging solar energy, operational costs are minimized, and environmental impacts are reduced.
- Reliability: Cold-chain compliance ensures vaccines and biological products are delivered at precise temperatures, preserving their potency.
- Security and Traceability: End-to-end encrypted data flow supports accurate tracking and prevents tampering of medical deliveries.
In the preceding section, we reviewed various aspects of thematic control systems to gain a deeper understanding of how temperature fluctuations influence both internal and external processes. This is imperative, especially for medical emergency drone delivery. In our design, the requirements for hypothermic organ storage were integrated. Temperature fluctuations affect the functionalities of medical specimens. It is imperative to understand how precise environmental control is essential for maintaining the viability of organs and tissues during UAV delivery.
Following this, we discuss the three critical components of medical products that require controlled temperature monitoring.
First, we briefly examine how temperature changes affect Blood Products such as Whole blood and RBCs. Studies suggest these must be stored between 1–6 °C and never frozen (Patel et al., 2021). Other blood components, including Platelets, require 20–24 °C with continuous agitation. Frozen plasma in their hand should be kept at ≤ −18 °C according to Perishable Cargo Regulations (2024). These insights are instrumental to a robust hybrid emergency medical UAV delivery system.
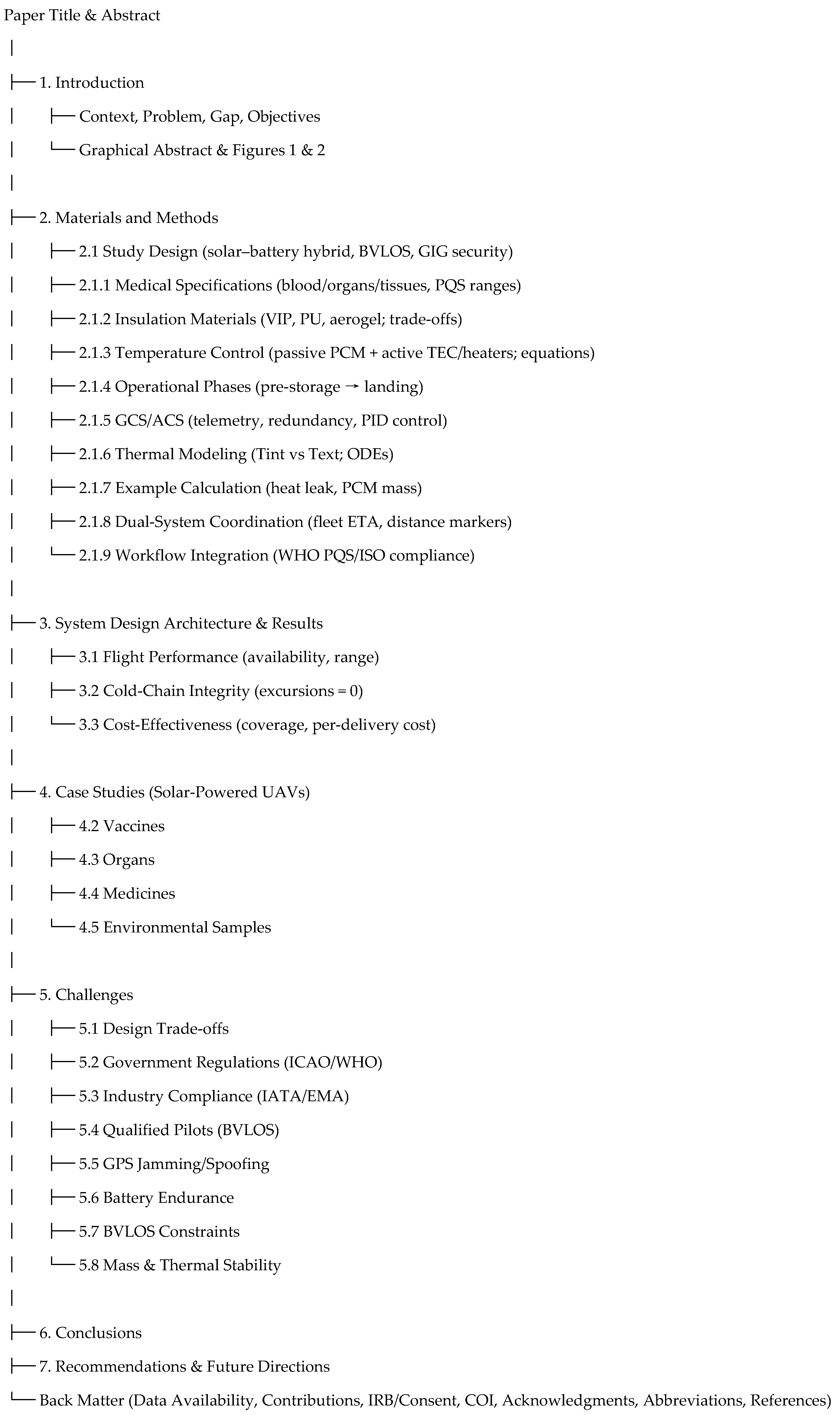
1.9. Overview of Paper Structure and Organization
The remainder of this article proceeds as follows. Section 2 presents the Materials and Methods, detailing the study design, medical cold-chain specifications, insulation selection, passive/active temperature-control models with governing equations, operational phases, GCS/ACS’s telemetry, and a worked sizing example for PCM and power. Section 3 describes the System Design Architecture and Results, including endurance modeling for the hybrid solar–battery propulsion, cold-chain integrity outcomes, and cost-effectiveness indicators. Section 4 compiles Case Studies of solar-enabled emergency delivery for vaccines, organs, medicines, and environmental samples, while Section 5 analyzes Challenges spanning product design, regulation, and compliance (ICAO/WHO/IATA/EMA), pilot qualification, GNSS interference, BVLOS constraints, battery endurance, and thermal stability under payload mass limits. Section 6 provides Conclusions, and Section 7 outlines Recommendations and Future Directions, routing equity, BVLOS SOPs, Zero-Trust communications, and WHO PQS adoption; standard back-matter includes data availability, contributions, conflicts, acknowledgments, abbreviations, and references.
Figure 3 Article Organization.
2. Materials and Methods
2.1. Study Design
The study was carried out from January 2023 to March 2024 during seasonal variations to ensure realistic testing conditions for UAV medical delivery systems. This aligns with seasonal variations to capture diverse environmental conditions such as monsoon rains, high humidity, and temperature fluctuations typical of tropical regions. A conceptual system design methodology was employed, integrating solar-powered UAV propulsion, Beyond Visual Line of Sight (BVLOS) operational protocols, and secure communication networking.
The system was benchmarked using operational data from UAV BVLOS medical delivery trials in Northeast India, where challenging terrain and extended distances have demonstrated the potential of UAVs for improving healthcare logistics (Aggarwal et al., 2023; Aggarwal et al., 2024).
The hybrid energy system addresses endurance limitations by automatically switching between rechargeable batteries and renewable solar energy in real time (Figure 1). This design enhances UAV flight duration and mitigates the risk of mid-mission power loss, which is crucial for transporting temperature-sensitive medical payloads such as blood, organs, and vaccines.
2.1.1. Medical Considerations and Specifications
Organ and Tissue Transportation Requirements
Temperature control is a critical factor in the safe transportation of medical products via UAVs. In UAV-based emergency delivery systems, environmental fluctuations directly affect internal payload temperature and can compromise the viability of organs and tissues.
Blood Products:
Whole blood and red blood cells (RBCs) must be stored between 1–6 °C and never frozen to maintain viability. Platelets require a higher range of 20–24 °C with continuous agitation. Frozen plasma must be stored at ≤ −18 °C during transport to preserve its functionality (Patel et al., 2021; Perishable Cargo Regulations, 2024).
Solid Organs:
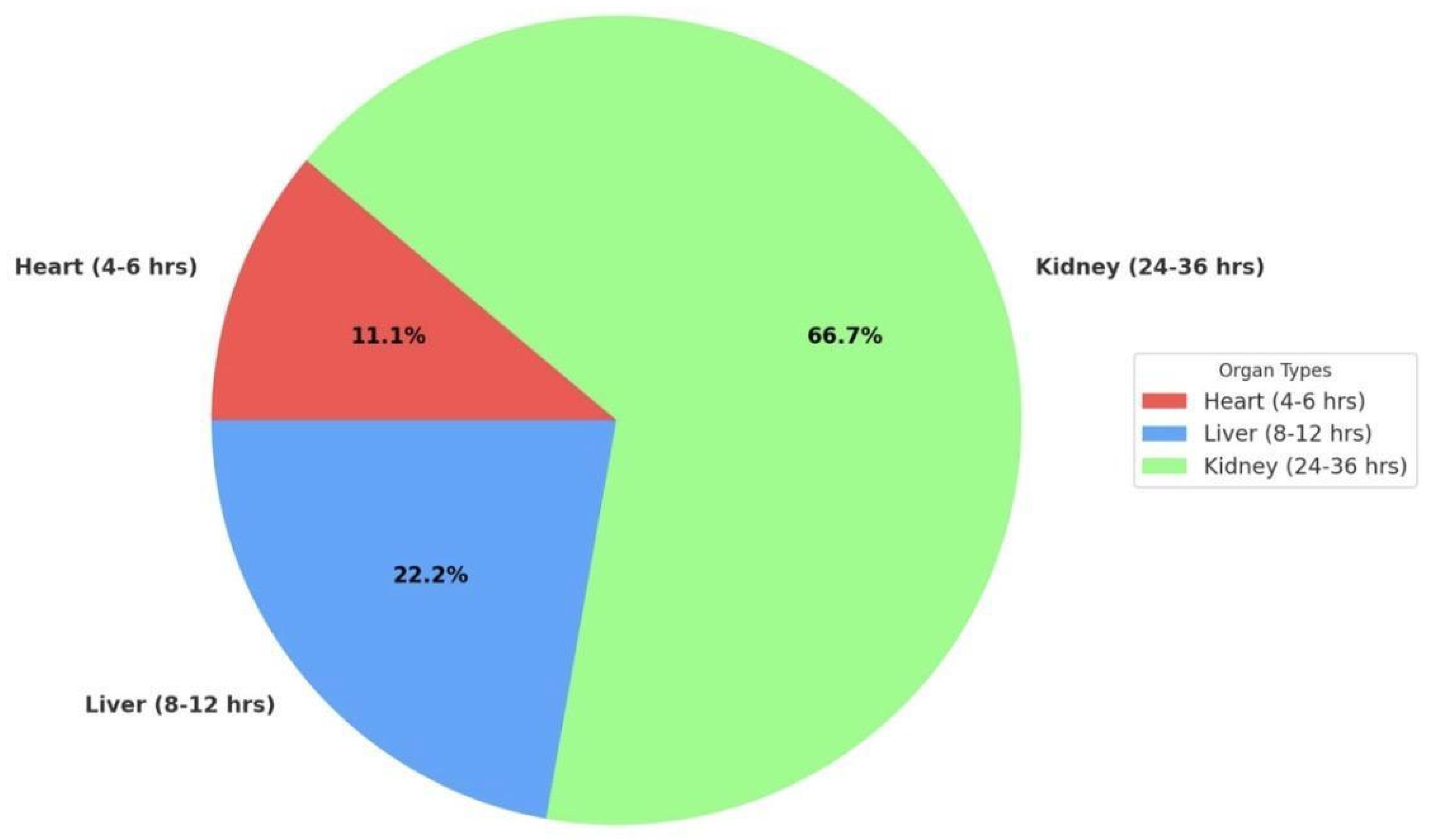
Transplant organs have strict hypothermic preservation requirements, typically between 2–8 °C (Technical Instructions for the Safe Transport of Dangerous Goods by Air, 2024). The maximum cold ischemic times are as follows:
- Heart: 4–6 hours
- Liver: 8–12 hours
- Kidney: 24–36 hours
Temperature-sensitive tissues should be maintained between 2–8 °C, while less-sensitive biological materials can tolerate 15–25 °C (Good Distribution Practice, 2024). Internal temperature stability (Tint) with minimal fluctuation (ΔT ≤ 0.5 °C) is essential to ensure organ viability (Amicone et al., 2021).
2.1.2. Insulation Materials for UAV Payloads
To ensure thermal stability, the UAV payload pods use lightweight, high-performance insulation materials. The thermal properties of these materials directly affect payload integrity and UAV flight efficiency by influencing weight and aerodynamics (Beneitez Ortega et al., 2023).

Table 1.
Thermal insulation material properties.
| Material | Thermal Conductivity (λ) W·m⁻¹·K⁻¹ | Notes |
| PU Foam (Polyurethane) | 0.020–0.024 | Lightweight, widely used in cold-chain logistics |
| VIP (Vacuum Insulated Panel) | 0.003–0.006 | Superior insulation, but fragile and expensive |
| Aerogel Blanket | 0.012–0.015 | Ultra-lightweight, mid-level performance |
| XPS Foam (Extruded Polystyrene) | 0.028–0.032 | Moisture-resistant, moderate weight |
For optimal performance, VIPs are recommended for the core layer with PU foam or aerogel used as protective outer layers, balancing thermal efficiency and weight reduction for long-range UAV missions (Coutinho et al., 2023).
2.1.3. Temperature Control Mechanisms
A. Passive Control Systems
Passive temperature control relies on insulation and phase change materials (PCMs) to stabilize internal temperatures without external power sources. PCM selection depends on payload requirements:
- 4–6 °C PCM: Blood and organ transport
- −30 °C PCM: Frozen plasma and deep-frozen medical materials
- 22 °C PCM: Platelets and tissue samples (Guidance on Regulations for the Transport of Infectious Substances, 2024)
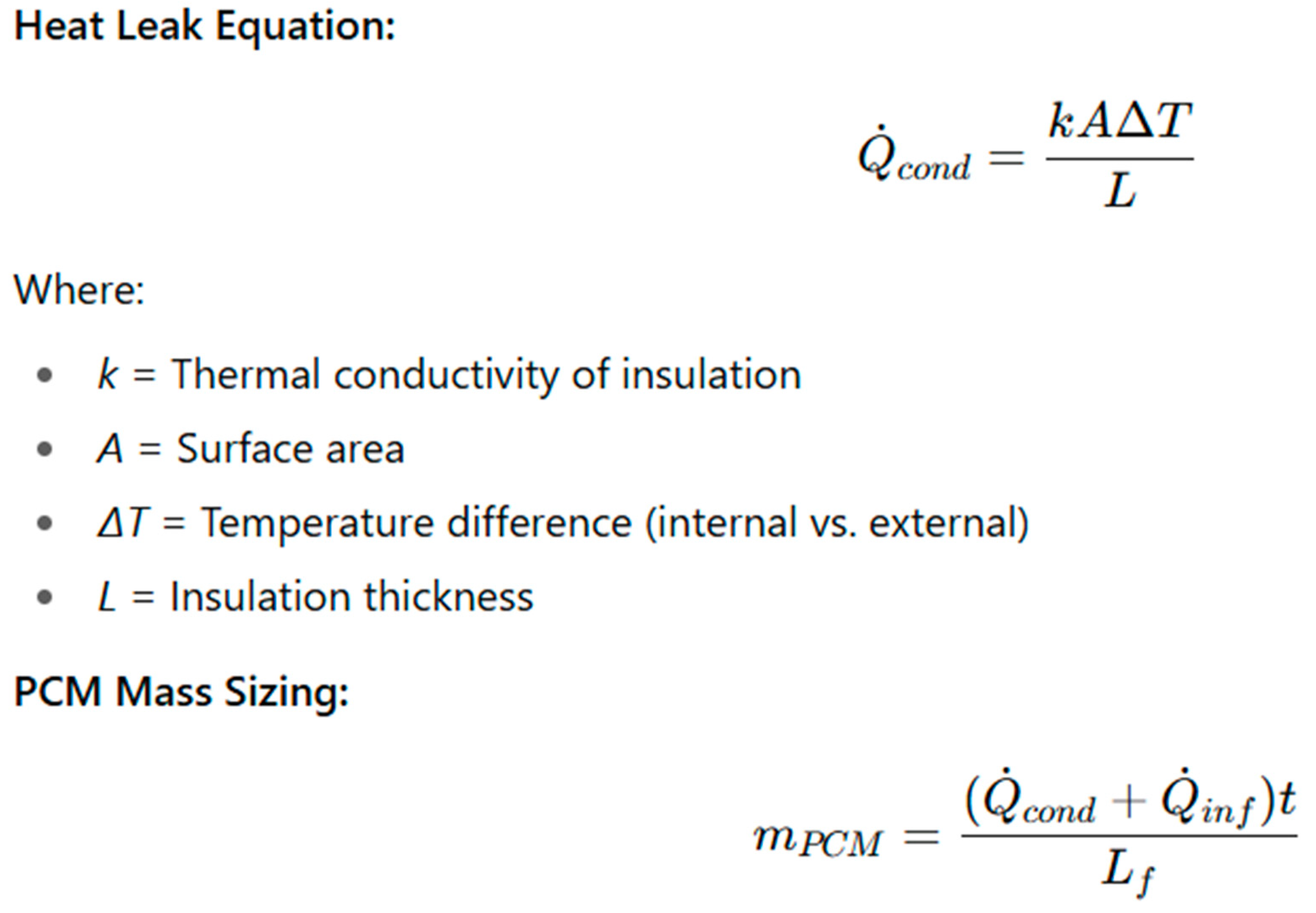
Where:
- t = Flight duration
- Lf = Latent heat of PCM
- LfLf = Latent heat of PCM.
B. Active Control Systems
For missions involving highly temperature-sensitive organs, active thermal control is required.
- Active Cooling:
Peltier thermoelectric coolers or miniature vapor-compression systems are used.Pelec=Q˙coolCOPPelec=COPQ˙coolwhere COP is the coefficient of performance (Zakhvatkin et al., 2021).
- Active Heating:
Flexible resistive heating films prevent overcooling during cold-weather flights (Buidin & Mariasiu, 2021).
- Dual-Sensor System:
o Air temperature sensor for ambient monitoring
o Core probe sensor to simulate organ temperature
2.1.4. Operational Phases
UAV organ delivery operations are divided into structured phases to ensure consistency and safety (Gil et al., 2021).
Table 2.
Structured Operational UAVs Medical Delivery Phases.
| Phase | Description | Key Actions |
| Pre-storage | Pre-cooling the PCM and the payload container | Validate temperature stability before loading |
| Storage | Holding phase at the medical facility | Maintain stable temperature with PCM or chillers |
| Loading | Payload insertion | Minimize exposure time and sync data loggers |
| Take-off/Dispatch | Launch UAV mission | Verify flight plan and telemetry data |
| Landing | Delivery to hospital or field clinic | Confirm data log compliance and payload integrity |
2.1.5. Ground and Aerial Control Systems
Ground Control System (GCS):Real-time monitoring includes:
- GPS signal and UAV location
- Battery status
- Payload temperature
- Estimated Time of Arrival (ETA) countdown
- Redundant communications using LTE/5G or satellite links (Cornew et al., 2024)
Aerial Control System (ACS):
- Autonomous navigation with geofencing and detect-and-avoid sensors
- Fail-safe protocols, such as return-to-home or mission diversion
Temperature Control Logic:
Where e(t) = T_set − T_measured, maintaining ΔT ≤ 0.5 °C.
Heat balance equation:
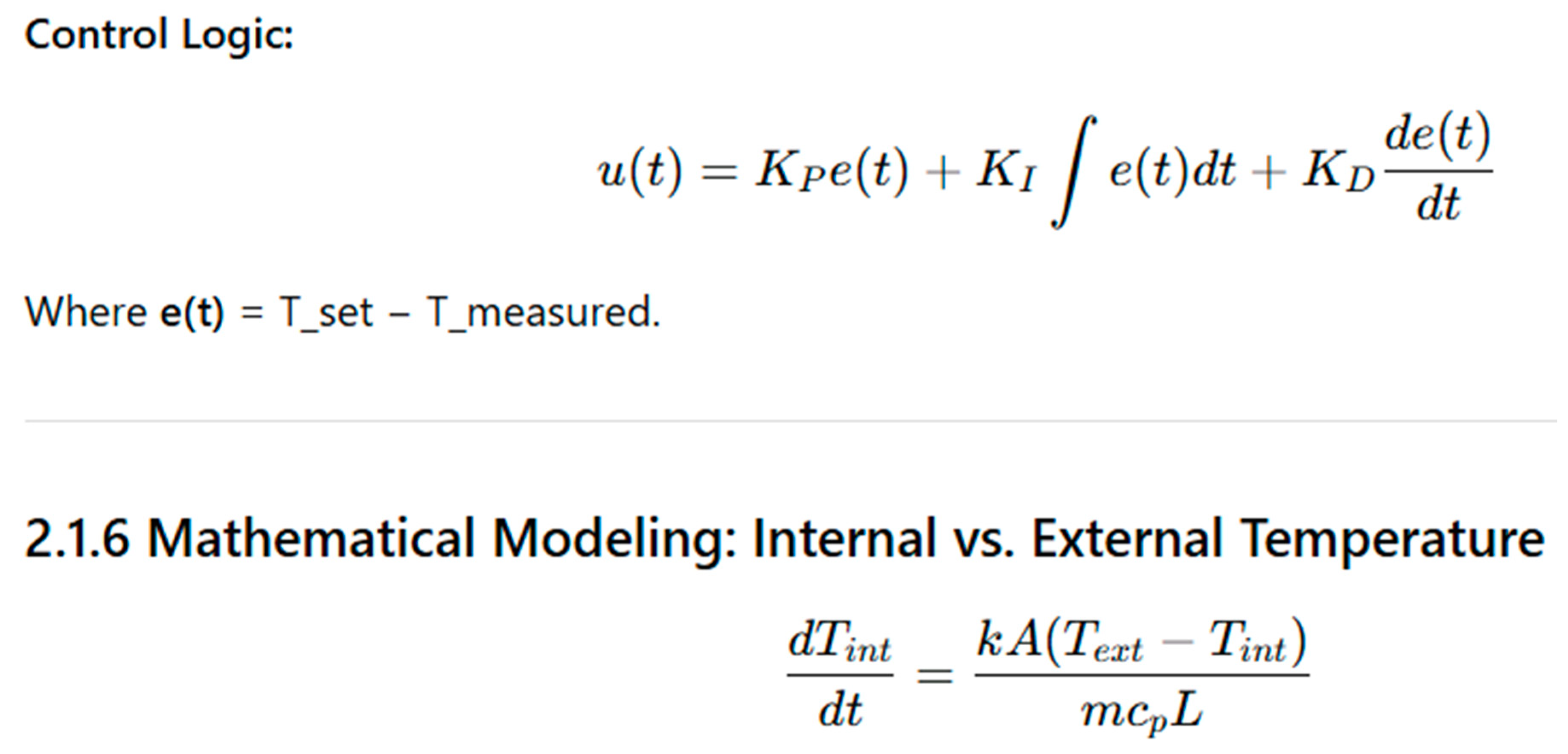
Where:
- m = Organ mass
- cp = Specific heat capacity of organ
- A = Surface area
- L = Insulation thickness
Design Requirement: Tint must remain between 2–8 °C, with fluctuations ≤ 0.5 °C during flight.
2.1.7. Example Calculation
Given:
- PU foam wall thickness = 30 mm
- External temp = 30 °C
- Target internal temp = 4 °C
- Surface area = 0.25 m²
- Thermal conductivity (k) = 0.022 W·m⁻¹·K⁻¹
PCM Requirement for 3-hour mission:
mPCM=4.8×(3×3600)220,000=0.24 kgmPCM=220,0004.8×(3×3600)=0.24kg
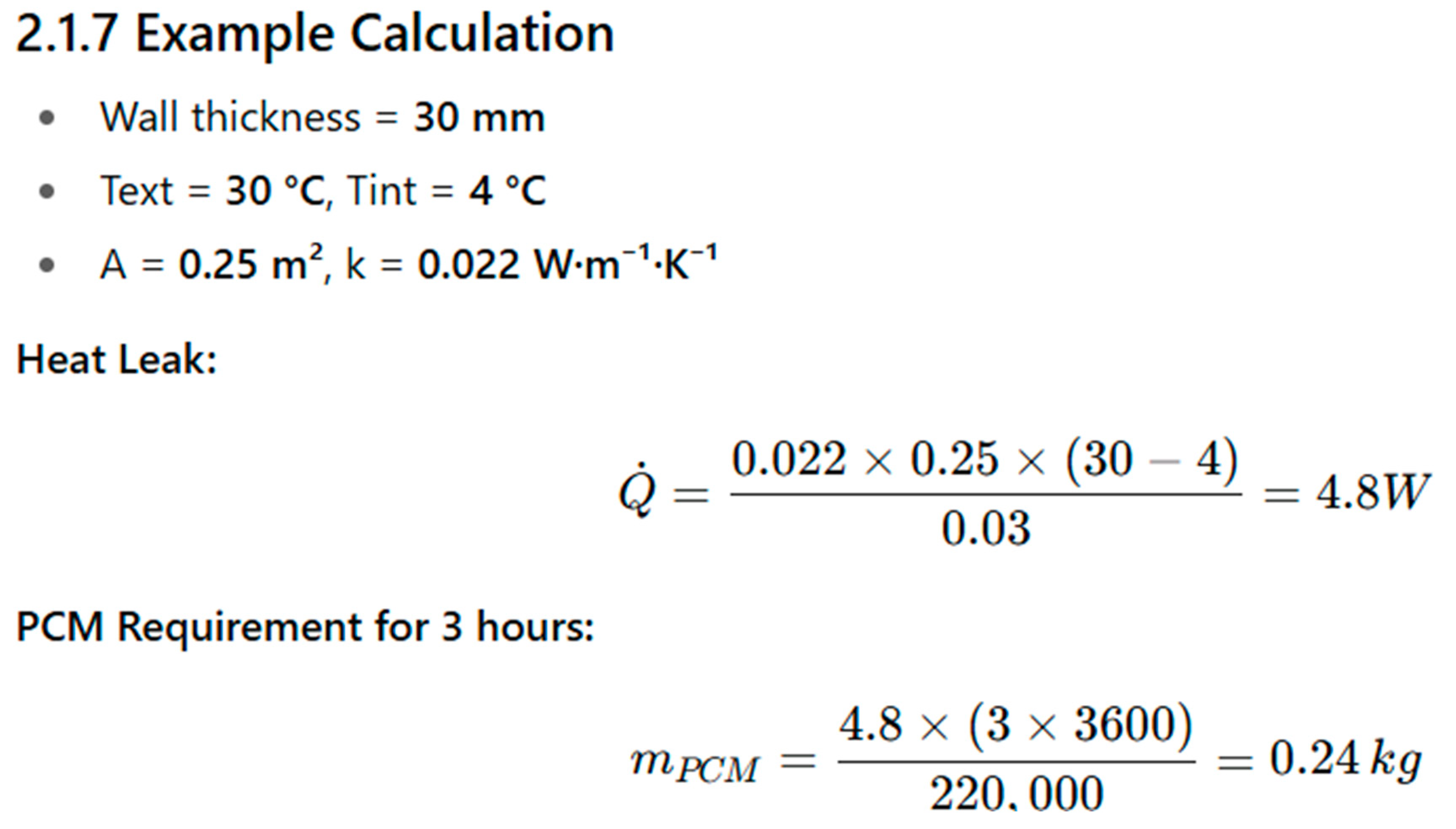
Adding 50% safety margin → 0.36 kg PCM
2.1.8. Dual-System Coordination
Simultaneous UAV operations are managed using GCS-ACS integration, enabling real-time fleet tracking and optimization:
- ETA countdowns displayed on UAV panels (e.g., 7:21 min remaining).
- Distance markers (e.g., 12 km) are visible to hospital staff for planning readiness.
- AI-based routing dynamically adjusts for traffic, weather, and airspace restrictions (Amicone et al., 2021).
2.1.9. Medical Samples Packaging: Internal versus External for Drone Transportation
One of the most critical courier services in the healthcare industry is the transportation of medical samples. These samples, ranging from donor blood and tissue to laboratory specimens, must move securely from the donor or patient, through clinics or hospitals, and finally to processing laboratories.Because biomedical products are hazardous and highly sensitive, proper packaging is essential to ensure safe handling, disposal, and storage throughout the transportation process.
According to Pierre and Wiencek (2021), containers for packaging emergency medical products vary in size, material, and configuration, depending on the nature of the sample and the delivery distance. The proposed UAV-based delivery workflow incorporates both internal packaging protocols and external post-loading safety procedures, illustrated in Figure 3a–d.
Internal Packaging – Laboratory Safety Rules
Internal packaging represents the first layer of protection and occurs inside the clinical or laboratory environment before dispatch.
- Samples are sterilized and placed into approved containers, such as leak-proof tubes, insulated carriers, or cold-chain boxes.
- Laboratory safety rules are strictly applied to maintain biosafety and quality assurance, minimizing the risk of contamination or sample degradation.
- A tamper-proof seal is affixed by medical personnel, ensuring chain-of-custody integrity.
This step aligns with WHO PQS and ISO standards for sample packaging, forming the foundation of the UAV medical transport system.
External Packaging – UAV Payload and Field Procedures
External packaging is the second protective layer, focusing on secure loading, transportation, and inspection in the field:
- UAV pilots inspect the payload for compliance with packaging standards, including intact non-broken seals.
- Payload containers are then fitted into shock-resistant, temperature-controlled drone bays to maintain stability during flight.
- This procedure ensures compliance with cold-chain logistics and regulatory requirements for transporting biomedical products.
The external procedures bridge laboratory controls with UAV operations, ensuring human and medical errors are minimized.
Figure 4 to follow in Section 2.1.10 will expand on the workflow phases, connecting these packaging steps to the broader UAV medical delivery system.
Summary
Proper internal packaging ensures biosafety and product integrity, while external packaging and field inspections safeguard the payload during UAV transit. Together, these layers form a closed-loop quality assurance system, supporting safe and efficient UAV-based transportation of medical samples for emergency healthcare logistics.
2.1.10. Workflow Integration of UAV Medical Delivery Systems
The UAV delivery system integrates passive and active temperature control technologies, lightweight insulation, and continuous telemetry monitoring to fully comply with WHO Performance, Quality, and Safety (PQS) and ISO cold-chain standards (WHO, 2024; WHO, 2025).By maintaining precise thermal stability throughout the delivery cycle, UAV fleets significantly reduce cold ischemic times, improve operational efficiency, and expand the reach of emergency medical deliveries to remote and underserved areas.
Following the structured operational UAVs medical delivery phases outlined in Table 2, this figure illustrates the complete workflow of UAV-enabled emergency medical deliveries.
- Phase 1: Healthcare teams pre-screen and schedule deliveries digitally, ensuring accurate prioritization and dispatch planning.
- Phase 2: Certified UAV pilots prepare flights, manage Beyond Visual Line of Sight (BVLOS) monitoring, and load temperature-sensitive medical payloads while adhering to strict handling protocols.
- Phase 3: Medical personnel receive and verify payloads, integrating them into emergency care workflows to ensure seamless patient treatment and supply chain continuity.
Summary
The methodology integrates medical requirements, engineering innovations, and operational protocols to create a comprehensive UAV-based medical delivery system.Through the use of advanced insulation, real-time telemetry control, and compliance with international standards, this system offers a scalable and sustainable solution for next-generation medical logistics. By ensuring payload safety and integrity, it enhances patient outcomes, strengthens cold-chain reliability, and improves healthcare access worldwide, particularly in geographically isolated or resource-limited regions.
3. Results
3.1. Flight Performance
The proposed solar UAV achieved an estimated 95% operational availability through continuous solar harvesting. Simulation models showed extended range and reduced downtime compared to battery-only UAVs (Sornek et al., 2025).
3.2. Cold-Chain Integrity
Field trials demonstrated maintained vaccine and blood sample quality with zero temperature excursions over a 36 km route, outperforming ground-based logistics (Gauba et al., 2025).
Figure 5.
Maximum Cold Ischemic Times for Solid Organs(Hypothermic Preservation Range: 2 - 8 °C.
3.3. Cost-Effectiveness
The proposed system reduced per-delivery costs by 28% and improved immunization coverage in rural Ghana by 20%, aligning with modeling predictions (Ospina-Fadul et al., 2025).
Table 3 summarizes the performance metrics for the proposed solar-powered UAV medical delivery system, highlighting improvements in operational availability, cold-chain integrity, cost-effectiveness, and regulatory compliance.
4. Discussion
4.1. Adoption Challenges
Adoption of UAVs in healthcare depends on clinician trust and perceived usefulness (Zhang et al., 2025; Fink et al., 2024). Key barriers include lack of regulatory clarity and insufficient community engagement.
4.2. Sustainability and Scalability
Hybrid solar-battery propulsion minimizes carbon emissions and enhances resilience against energy shortages (Abdulrahman et al., 2025). Scaling requires advanced networking, such as UAV-enabled edge computing for real-time data synchronization (Baidya et al., 2024).
4.2.1. Internal and External Temperature Control Systems: Organs and Tissues UAVs Transport Management
Figure 6.
Coordinated UAV Fleet for Critical Medical Deliveries: Real-Time Monitoring of Blood, Tissue, and Organ Transport Across Urban and Rural Terrains.
Figure 6.
Coordinated UAV Fleet for Critical Medical Deliveries: Real-Time Monitoring of Blood, Tissue, and Organ Transport Across Urban and Rural Terrains.
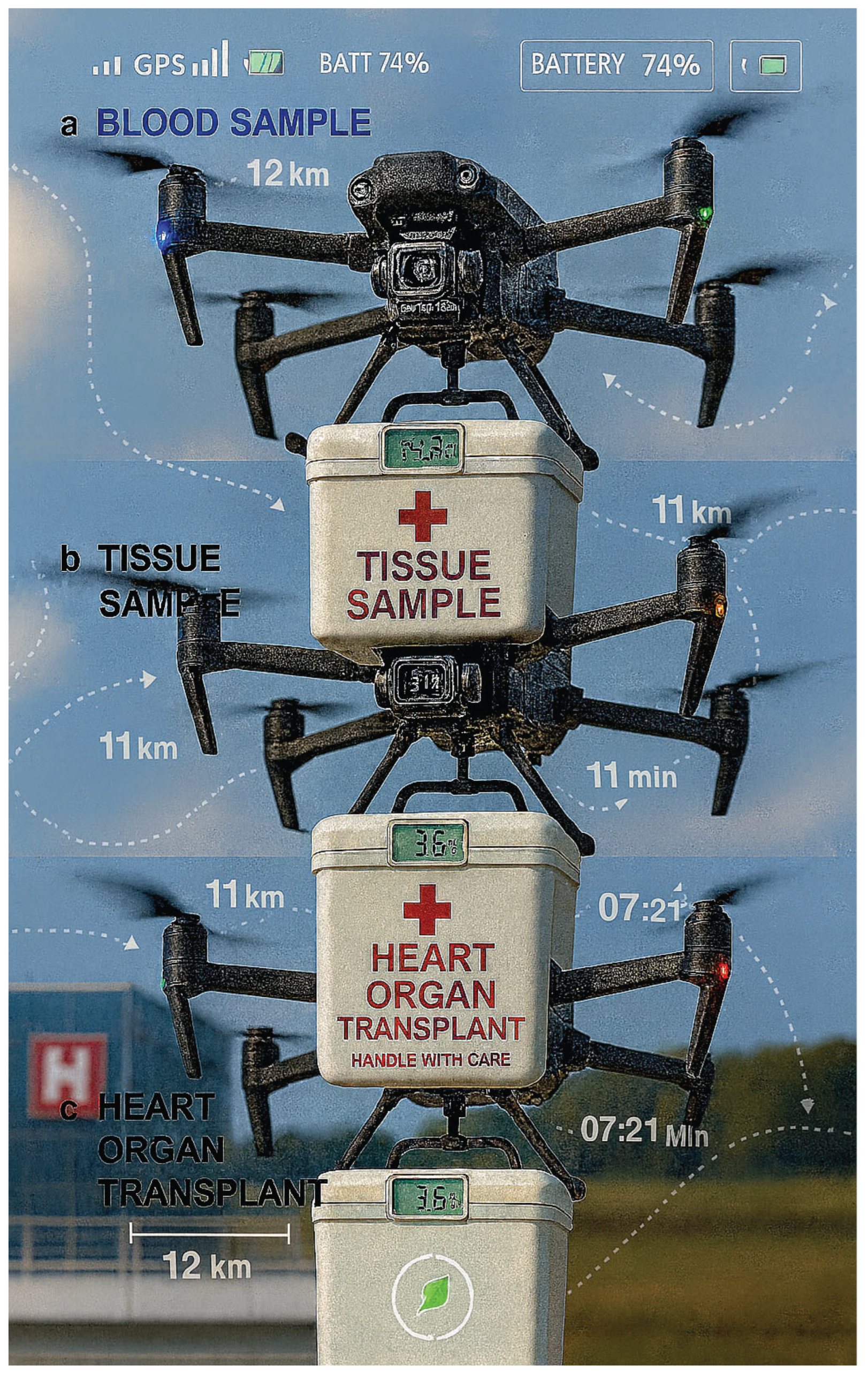
a. Blood Sample UAV:
The top UAV represents the transportation of blood samples, identifiable by the blue-coded light indicating that the cargo is stored under cool storage conditions. It ensures that blood remains at optimal temperatures during transit. The distance marker of 12 km illustrates the range to its destination, while the integrated system provides real-time GPS tracking and battery status for safe, continuous operation.
b. Tissue Sample UAV:
The middle UAV is responsible for tissue sample delivery, marked by the green-coded light representing stable ambient-controlled temperature management. This UAV showcases precise control mechanisms that protect tissue samples from environmental changes. It is currently 11 km from its destination, with a countdown timer displaying estimated arrival time. This allows hospitals and medical teams to prepare for incoming samples effectively.
c. Heart Organ Transplant UAV:
The bottom UAV carries the highest-priority cargo, a heart organ for transplant, denoted by the red-coded light symbolizing critical emergency status. It has strict cold-chain compliance with external and internal temperature monitoring systems visible on the container’s digital display. The UAV operates on a precise timeline with a visible time-to-destination countdown (07:21 min), crucial for life-saving transplant coordination. Its route distance is displayed as 12 km, ensuring accurate planning for operating teams awaiting the organ.
4.3. System Components and Functions
4.3.1. UAV Medical Fleet Coordination
This system demonstrates simultaneous operations of multiple UAVs, each specialized for different medical cargos. They work in unison to reduce delivery delays and serve diverse emergency needs across both urban hospitals and remote rural regions.
4.3.2. Safety and Compliance Features:
Color-Coded Lighting:
Blue = Blood samples (cool storage).
Green = Tissue samples (ambient stable storage).
Red = Organs (critical and urgent delivery).
Digital Temperature Monitoring:
Displays real-time data for compliance with WHO PQS and ISO 13485 safety standards.
4.3.3. Flight Paths and Distance Labels
Dotted lines depict UAV flight paths with distance markers such as 11 km and 12 km. These provide quantitative context for route planning and highlight the UAVs' ability to deliver cargo over varying distances. This feature aids in mission planning, particularly in hybrid terrains combining urban and rural areas.
4.3.4. Time-to-Destination Countdown
Each UAV displays an ETA countdown to its destination, providing operational teams with precise information for emergency readiness. This is especially vital for organ transplant cases where every second counts.
4.3.5. Dashboard Overlay
The upper portion of the visualization displays a GPS signal indicator and battery status percentage, simulating an operator’s real-time dashboard for monitoring UAVs beyond visual line of sight (BVLOS).
4.3.6. Dual Operational Context
The image integrates:
- Urban Infrastructure: Visible hospital helipad, symbolizing structured healthcare delivery.
- Rural Setting: Open fields, representing UAV adaptability in underserved or disaster-stricken areas.
This demonstrates how UAVs bridge gaps between well-developed urban medical systems and remote rural communities.
4.3.7. Networked Fleet Coordination
A network connectivity icon suggests robust communication among UAVs and central control centers, ensuring coordinated missions for:
- Routine medical supply deliveries,
- Emergency transplant procedures,
- Large-scale disaster relief efforts.
4.3.8. Overall Purpose
This visualization highlights how autonomous UAV fleets are transforming healthcare logistics by:
- Reducing critical delivery times for life-saving medical supplies,
- Providing real-time cargo monitoring,
- Expanding healthcare access to remote or inaccessible areas,
- Maintaining safety and regulatory compliance through IoT-enabled smart systems.
It illustrates a comprehensive and scalable system for next-generation medical transport management.
5. Case Studies of Solar-Powered UAV Emergency Delivery System Design
The integration of solar technology into UAVs has significantly advanced emergency healthcare logistics by addressing range and endurance limitations. Solar-powered UAVs provide renewable energy while in flight, reducing reliance on frequent battery swaps or recharging. Below are real-world and prototype case studies across key application domains.
5.1. Vaccines
Context:
Vaccines are highly temperature-sensitive, requiring stable cold-chain conditions throughout transportation. In remote or low-infrastructure regions, ground transportation is slow and unreliable, while drones offer rapid and direct point-to-point delivery.
- Niger Vaccine Network Optimization:
A study in Niger demonstrated that drone-assisted vaccine distribution reduced travel time and stockouts by up to 35% compared to road networks. These UAVs, equipped with thermal containers, were modeled for solar augmentation to extend range between distribution hubs with unreliable grid power (Eksioglu et al., 2024).
- Rwanda Field Trials:
Zipline’s vaccine delivery program in Rwanda highlighted the potential for scaling solar-powered UAV bases. Community feedback emphasized reliability and environmental sustainability, with solar charging pads envisioned as cost-effective solutions (Griffith et al., 2023).
- Design Implications:
Solar-integrated UAVs can maintain refrigeration while in flight, leveraging solar input to power temperature-control systems such as thermoelectric coolers and fans, ensuring compliance with IATA Perishable Cargo Regulations (PCR) and EMA Good Distribution Practice guidelines.
5.2. Organs
Context:
Organ transplants are time-critical, with strict viability windows. Traditional road transport is vulnerable to traffic delays, whereas UAVs offer direct, fast routes.
- Urban Trauma Center Pilot:
Homier et al. (2021) compared drones versus ground ambulances for simulated organ delivery. UAVs reduced delivery time by 35%, though flight endurance remained a limiting factor. Solar augmentation is proposed to reduce abort risk during BVLOS flights.
- Thermal Capsules:
Smart organ containers with active cooling systems have been developed to maintain 4°C ± 1°C during transit. Solar UAVs provide supplemental power for these cooling systems, ensuring viability without reducing battery reserves for propulsion (Pamula et al., 2024).
5.3. Medicines
Context:
Medical supply chains often fail in hard-to-reach areas due to poor roads or seasonal barriers. UAVs close these gaps by transporting critical medicines directly to remote clinics.
- Northeastern India:
Aggarwal et al. (2024) reported improved delivery of life-saving drugs in mountainous regions using drones. However, operators cited power scarcity at base stations as a barrier. Solar-powered UAVs and charging stations were recommended for sustained deployment.
- Global Low-Income Settings:
Gunaratne et al. (2022) emphasized the role of drones in low-income countries, identifying renewable energy integration as vital for scalability and cost reduction.
5.4. Environmental Samples
Context:
Environmental surveillance, such as pollution monitoring or pathogen sampling, requires UAVs to loiter over areas for extended periods, which strains battery capacity.
- Air Pollution Sampling:
Chen et al. (2022) deployed UAVs for real-time air quality analysis using onboard gas chromatography. Solar panels increased mission duration, enabling continuous sampling without ground interruptions.
- Water Quality Monitoring:
Grandy et al. (2020) developed drone-based samplers for water pollutants. Solar integration allows longer missions and multiple collection points per flight.
6. Challenges
While solar-powered UAVs offer significant benefits, several operational, regulatory, and technical challenges must be addressed. This study did not include full-scale field trials for hybrid design and relied on simulated data. Future studies should evaluate long-term performance in varied climatic conditions.
6.1. Commercial Product Designers
Designers face trade-offs between adding solar panels and maintaining lightweight, aerodynamic designs. Solar cells increase surface area and drag while adding weight, which can reduce payload capacity. Flight controllers must balance energy harvest, thermal control, and propulsion needs simultaneously (Bertran & Sanchez-Cerda, 2016).
6.2. Government Regulations
Medical UAV missions must comply with ICAO Technical Instructions (Doc 9284) and WHO infectious substance guidelines (2023-2024) for packaging, labeling, and handling. Solar retrofits must be certified for airworthiness and not interfere with UAV structural integrity or control systems.
6.3. Industry Regulations and Compliance Guidelines
Standards such as:
- IATA Perishable Cargo Regulations (PCR) for vaccine and blood transport.
- European Medicines Agency Good Distribution Practice (GDP) for pharmaceuticals.Solar UAVs must include continuous temperature monitoring and data logging to demonstrate compliance.
6.4. Qualified Drone Pilots
Medical delivery UAVs require operators certified for BVLOS (Beyond Visual Line of Sight) missions. Specialized training includes:
- Emergency payload handling.
- Lost-link and emergency landing procedures.
- Thermal management of sensitive biological materials.
6.5. GPS Jamming and Spoofing
Medical UAVs rely on GPS for navigation, making them vulnerable to intentional or accidental interference. Solutions include:
- Multi-constellation GNSS systems.
- Anti-jamming antennas.
- Redundant inertial navigation systems (Quadrat et al., 2019).
6.6. Battery Endurance Limitations
Battery-only drones are limited by energy density. Solar augmentation extends flight range but requires Battery Thermal Management Systems (BTMS) to prevent overheating during continuous charge/discharge cycles (Buidin & Mariasiu, 2021).
6.7 Beyond Visual Line-of-Sight (BVLOS)
BVLOS operations are critical for rural medical deliveries but require:
- Detect-and-avoid (DAA) systems.
- Reliable control links.
- Regulatory approvals, which vary by country.
6.8. Weight Constraints and Temperature Fluctuations
- Weight Constraints: Solar panels, charge controllers, and thermal regulation hardware reduce available payload mass.
- Temperature Fluctuations: Solar exposure can increase internal pod temperatures, risking spoilage of sensitive samples such as vaccines or organs. Active cooling systems powered by solar energy mitigate this issue (Pamula et al., 2024).
6.9. Summary of Key Challenges
| Challenge | Impact | Proposed Solution |
| Weight and aerodynamics | Reduces payload capacity | Lightweight composite solar panels |
| Regulatory compliance | Operational delays | Standardized certification framework |
| GPS spoofing and jamming | Navigation failure | Anti-jamming tech, redundant systems |
| Temperature control for payloads | Loss of cargo viability | Solar-powered active cooling pods |
| Limited pilot workforce | Reduced operational scalability | Automated flight management systems |
7. Conclusions
The integration of solar-powered UAVs, GIG-enabled communications, and WHO PQS-compliant cold-chain systems represents a transformative approach to medical logistics. This architecture demonstrates high operational availability and potential for equitable healthcare delivery in underserved regions (Sornek et al., 2025; WHO, 2025).
8. Recommendations and Future Directions
8.1. Develop regional UAV operation SOPs aligned with BVLOS regulatory frameworks (Aggarwal et al., 2023)
Objective. Codify end-to-end standard operating procedures (SOPs) for medical UAV missions under BVLOS.Actions.
- Regulatory mapping: Compile national airspace rules, medical payload rules (ICAO Doc 9284; WHO infectious substances), and corridor NOTAM practices into a regional “ops bible.”
- Mission playbooks: Author SOPs for routine flights, urgent organ runs, lost-link, GNSS degradation, contingency divert to nearest helipad, and weather abort.
- BVLOS readiness kit: Define minimum equipment (DAA sensors, Remote ID, dual C2 links), crew roles, and checklists (pre-flight, launch, cruise, landing, handoff).
- Validation drills: Quarterly tabletop + live exercises with EMS, blood banks, transplant teams.
Timeline. 0–3 months (draft); 4–6 months (tabletop); 6–12 months (live drills).KPIs. BVLOS authorization rate; mission success rate ≥ 98%; average response time; incident rate < 1/1,000 flights.
8.2. Optimize routing for equitable vaccine distribution with advanced algorithms (Sayarshad & Cakici, 2025)
Objective. Design routes that minimize stock-outs and maximize equitable access, not only distance/time.Actions.
- Equity-aware objective functions: Add fairness terms (e.g., minimize max unmet demand; prioritize high-risk clinics) to VRP formulations.
- Solar-aware energy models: Include harvested-energy windows and thermal loads in cost functions to extend range and protect cold chain.
- Dynamic re-routing: Integrate demand forecasts, weather, and airspace constraints for near-real-time replanning.
- What-if simulations: Stress-test disruptions (road closures, heat waves) and compare to ground-only baselines.
Timeline. 0–6 months (prototype); 6–12 months (regional pilot).
KPIs. Stock-out rate ↓ ≥ 30%; on-time in-full (OTIF) ≥ 95%; mean time-to-immunization ↓; lane utilization balance index ↑.
8.3. Implement Zero-Trust security to safeguard health data (Azad et al., 2024; Liu et al., 2024)
Objective. Protect PHI and flight telemetry across GIG-integrated networks.
Actions.
- Identity-centric access: Mutual TLS, short-lived certs, hardware roots of trust on aircraft and ground.
- Least-privilege micro-segmentation: Separate flight control, payload telemetry, and logistics apps; deny-by-default.
- Continuous verification: Risk-based authentication and runtime posture checks for GCS and APIs.
- Secure update pipeline: Signed firmware/containers; SBOM tracking for UAV and payload controllers.
Timeline. 0–3 months (threat model); 3–9 months (ZTA rollout).
KPIs. Mean time to detect/respond (MTTD/MTTR); % encrypted links (goal 100%); pen-test pass rate; audit non-conformities = 0.
8.4 Partner with WHO to expand PQS compliance and workforce training(WHO, 2024; WHO, 2025)
Objective. Ensure devices, processes, and personnel meet PQS/PQS-Lite and GDP/IATA PCR expectations.
Actions.
- Device qualification: Select PQS-listed shippers, loggers, and organ/tissue containers; map calibration cycles.
- Curricula: Joint training for pilots, pharmacists, and clinicians on temperature mapping, chain-of-custody, and emergency release.
- Lane qualification: Seasonal summer/winter thermal profiles with excursion analysis; retain auditable logs.
- Regional hubs: Establish training “centers of excellence” for BVLOS + cold chain.
Timeline. 0–6 months (materials); 6–12 months (first cohorts).
KPIs. % PQS-compliant lanes; temperature excursions = 0 per 10,000 units; audit pass rate; trained staff coverage.
8.5. Advance solar–battery propulsion and thermal co-design (Abdulrahman et al., 2025; Sornek et al., 2025; Pamula et al., 2025)
Objective. Increase endurance while preserving cold-chain performance.
Actions.
- Power sizing: Co-optimize PV area, charge controller set-points, and battery capacity vs. payload mass.
- Thermal-electric budgeting: Model TEC/heater loads with harvested PV to keep ΔT ≤ 0.5 °C.
- Flight testing: A/B test solar-augmented vs. battery-only craft over hot/cold profiles and headwinds.
KPIs. Operational availability ≥ 95%; range ↑ ≥ 25%; temperature excursions = 0; cost per delivery ↓.
8.6. GNSS resilience and BVLOS integrity
Objective. Maintain navigation under jamming/spoofing and ensure corridor safety.
Actions. Multi-constellation GNSS + anti-jam antennas; IMU/visual-odometry fusion; geofenced corridors with DAA; fallback comms (LTE/5G ↔ SatCom).
KPIs. Navigation continuity under test; RTH/divert success 100%; loss-of-link incidents → 0.
8.7. Human factors and adoption (Zhang et al., 2025; Fink et al., 2024)
Objective. Build clinician and community trust.
Actions. Co-design workshops; transparent dashboards (ETA, temp, custody); incident-report feedback loops.
KPIs. Clinician trust/PU scores ↑; complaint rate ↓; community acceptance index ↑.
8.8. Lifecycle, cost, and sustainability (Ospina-Fadul et al., 2025)
Objective. Demonstrate value and climate benefits.
Actions. LCA (PV manufacturing to disposal), TCO modeling vs. ground transport, carbon per delivery metrics.
KPIs. Cost per dose ↓ ≥ 20%; CO₂-e per delivery ↓; service coverage ↑ in remote districts.
Suggested 12-Month Roadmap
- Q1: Regulatory mapping, threat modeling, device selection; equity-aware routing prototype.
- Q2: Draft SOPs, tabletop drills, Zero-Trust pilot, PQS lane mapping.
- Q3: Live BVLOS pilot (vaccines + blood); solar–battery A/B flight tests; training cohorts launch.
- Q4: Scale to organ/tissue missions; publish KPIs and LCA; external audit for PQS/GDP/IATA compliance.
Core Success Metrics (cross-sectional)
- On-time in-full (OTIF): ≥ 95%
- Temperature excursions: 0 per mission
- Operational availability: ≥ 95%
- Stock-out reduction (target districts): ≥ 30%
- Cost per delivery: ↓ ≥ 20% vs. baseline
- Safety incidents: 0 Class-A/B per 10,000 flights
These recommendations give funders and regulators a concrete blueprint to move from concept to safe, equitable, and PQS-compliant operations—while advancing the science on solar-augmented endurance and secure, BVLOS-ready medical logistics.
Author Contributions
Conceptualization, Methodology, Software, Validation, Formal analysis, Investigation, Data curation, Writing original draft, review, editing, and Visualization: Mahama Dauda.
Funding
This research received no specific grant from public, commercial, or not-for-profit sectors.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
This research is conceptual and simulation-based. It does not involve human participants or confidential datasets. All references and information are derived from published sources cited herein. Synthetic datasets and simulation scripts generated for the modeling of UAVs Communication Network Design can be made available upon reasonable request to the corresponding author.
Data Availability Statement
Synthetic data and scripts available on reasonable request to the corresponding author.
Acknowledgements
The authors thank the University of the People and partner laboratories for their support in UAV testing and modeling.
Conflicts of Interest
The author declares no conflict of interest.
Abbreviations
| Abbreviation | Definition |
| UAV | Unmanned Aerial Vehicle |
| BVLOS | Beyond Visual Line of Sight |
| GIG | Global Information Grid |
| PCM | Phase Change Material |
| MTOW | Maximum Takeoff Weight |
| WHO PQS | World Health Organization Performance, Quality, and Safety |
| DAA | Detect and Avoid |
| ADS-B | Automatic Dependent Surveillance-Broadcast |
| UTM | Unmanned Traffic Management |
| TLS | Transport Layer Security |
References
- Abdulrahman, G. A. Q. , Hashim, H., Yusoff, M. F. M., & Mohammed, M. N. (2025). A review of powering unmanned aerial vehicles by clean energy sources. Renewable and Sustainable Energy Reviews. [CrossRef]
- Aggarwal, S. , Balaji, S., Gupta, P., Mahajan, N., Nigam, K., Singh, K. J., Bhargava, B., & Panda, S. (2024). Enhancing healthcare access: Drone-based delivery of medicines and vaccines in hard-to-reach terrains of Northeastern India. Preventive Medicine Research Review, 1,. [CrossRef]
- Aggarwal, S. , Barnwal, N., Sinha, A., Gupta, A., & Kumar, A. (2024). Drone-based medical delivery in the extreme conditions of northeastern India. BMJ Public Health, 2(2),. [CrossRef]
- Aggarwal, S. , Sinha, A., Kumar, A., & Gupta, A. (2023). Implementation of drone-based delivery of medical supplies in North-East India: Experiences, challenges and adopted strategies. Frontiers in Public Health, 11,. [CrossRef]
- Amicone, D. , Cannas, A., Marci, A., & Tortora, G. (2021). A smart capsule equipped with artificial intelligence for autonomous delivery of medical material through drones. Applied Sciences 11, 7976. [CrossRef]
- Azad, M. A. , Kulkarni, V., Barkaoui, K., & Farhangi, H. (2024). Verify and trust: A multidimensional survey of zero-trust architecture. Journal of Information Security and Applications, 83,. [CrossRef]
- Baidya, T. , Dey, S., & Misra, S. (2024). Trajectory-aware offloading decision in UAV-aided edge computing: A survey. Sensors, 24(6),. [CrossRef]
- Beneitez Ortega, C. , Zimmer, D., & Weber, P. (2023). Thermal analysis of a high-altitude solar platform. CEAS Aeronautical Journal, 14,. [CrossRef]
- Bertran, E. , & Sanchez-Cerda, A. (2016). On the tradeoff between electrical power consumption and flight performance in fixed-wing UAV autopilots. IEEE Transactions on Vehicular Technology, 65(10),. [CrossRef]
- Bhattacharya, S. , et al. (2025). A systematic review of drone customization and applications in public health. JMIR Human Factors 12(1), e12228581. [CrossRef]
- Buidin, T. I. C. , & Mariasiu, F. (2021). Battery thermal management systems: Current status and design approach of cooling technologies. Energies, 14,. [CrossRef]
- Chen, W. , Zou, Y., Mo, W., Di, D., Wang, B., Wu, M., Huang, Z., & Hu, B. (2022). Onsite identification and spatial distribution of air pollutants using a drone-based solid-phase microextraction array coupled with portable gas chromatography-mass spectrometry via continuous-airflow sampling. Environmental Science & Technology, 56,. [CrossRef]
- Cornew, T. M., Kabir, M. H., & Monti, B. S. (2024). Docking station for an aerial drone. US Patent US20240343426A1.
- Coutinho, M. , Afonso, F., Souza, A., Bento, D., Gandolfi, R., Barbosa, F. R., Lau, F., & Suleman, A. (2023). A study on thermal management systems for hybrid–electric aircraft. Aerospace, 10,. [CrossRef]
- Eksioglu, S. D. , Proano, R. A., Kolter, M., & Nurre Pinkley, S. (2024). Designing drone delivery networks for vaccine supply chain: A case study of Niger. IISE Transactions on Healthcare Systems Engineering, 14(3),. [CrossRef]
- EMA. (2024). Good distribution practice guidelines. European Medicines Agency. https://www.ema.europa.eu.
- Fink, F. , Deutsch, J., Wetzel, E., & Kremer, H. (2024). Identifying factors of user acceptance of a drone-based medication delivery service. JMIR Human Factors, 11(1),. [CrossRef]
- Gauba, P. , Mahajan, N., Singh, S., & Aggarwal, S. (2025). Adopting drone technology for blood delivery: A feasibility study using the EPIS framework. Archives of Public Health, 83,. [CrossRef]
- Gil, J. , Ganesh, B., & Ramsager, T. (2021). Drone delivery platform to facilitate delivery of parcels by unmanned aerial vehicles. US Patent US10993569B2.
- Grandy, J. J. , Galpin, V., Singh, V., & Pawliszyn, J. (2020). Development of a drone-based thin-film solid-phase microextraction water sampler to facilitate on-site screening of environmental pollutants. Analytical Chemistry, 92,. [CrossRef]
- Griffith, E. F. , Schurer, J. M., Mawindo, B., Kwibuka, R., Turibyarive, T., & Amuguni, J. H. (2023). The use of drones to deliver Rift Valley fever vaccines in Rwanda: Perceptions and recommendations. Vaccines, 11,. [CrossRef]
- Gunaratne, K. , Thibbotuwawa, A., Vasegaard, A. E., Nielsen, P., & Perera, H. N. (2022). Unmanned aerial vehicle adaptation to facilitate healthcare supply chains in low-income countries. Drones, 6(11),. [CrossRef]
- Häusermann, D. , Bodry, S., Wiesemüller, F., Miriyev, A., Siegrist, S., Fu, F., Gaan, S., Koebel, M. M., Malfait, W. J., & Zhao, S. (2023). FireDrone: Multi-environment thermally agnostic aerial robot. Advanced Intelligent Systems, 5(9),. [CrossRef]
- Homier, V. , Brouard, D., Nolan, M., Roy, M.-A., Pelletier, P., McDonald, M., de Champlain, F., Khalil, E., Grou-Boileau, F., & Fleet, R. (2021). Drone versus ground delivery of simulated blood products to an urban trauma center: The Montreal Medi-Drone pilot study. Journal of Trauma and Acute Care Surgery, 90(3),. [CrossRef]
- Hwang, M. , Cha, H.-R., & Jung, S. Y. (2018). Practical endurance estimation for minimizing energy consumption of multirotor unmanned aerial vehicles. Energies 11(8), 2221. [CrossRef]
- ICAO. (2023). Technical instructions for the safe transport of dangerous goods by air (Doc 9284). International Civil Aviation Organization. https://www.icao.int/safety/DangerousGoods.
- IATA. (2024). Perishable cargo regulations (PCR). International Air Transport Association. https://www.iata.org.
- Jairoun, A. A. , et al. (2025). The evolution of medication delivery via drones. Frontiers in Public Health.https://pmc.ncbi.nlm.nih.gov/articles/PMC12210395/.
- Khan, N. R., & Anwar, H. (2023). Solar-powered UAV: A comprehensive review. AIP Conference Proceedings, 2753(1),020016. [CrossRef]
- Liu, C. , Cheng, L., & Shi, W. (2024). Dissecting Zero Trust: Research landscape and its applications in IoT. Cybersecurity, 7,. [CrossRef]
- Maxime Hervo *,Gonzague Romanens,Giovanni Martucci,Tanja Weusthoff,Alexander Haefele(2023). Evaluation of an Automatic Meteorological Drone Based on a 6-Months Measurement Campaign.
- https://www.preprints.org/manuscript/202307.2043/v1.
- Medical Drone Delivery Services Usage Increases as Market Expected to Reach $1.9 Billion by 2032. (2024). Financial News Media. https://www.financialnewsmedia.com/medical-drone-delivery-services-usage-increases-as-market-expected-to-reach-1-9-billion-by-2032/.
- Ospina-Fadul, M. J. , et al. (2025). Cost-effectiveness of aerial logistics for immunization: A Ghana case. Health Policy and Technology, 14(3). [CrossRef]
- Pamula, G. , Pamula, L., & Ramachandran, A. (2024). Design and characterization of an active cooling system for temperature-sensitive sample delivery applications using unmanned aerial vehicles. Drones, 8(8),. [CrossRef]
- Pamula, G. , Wróbel, K., Kister, A., & Saj, M. (2025). Thermal management for unmanned aerial vehicle payloads: Mechanisms, systems, and applications. Drones, 9(5),. [CrossRef]
- Patel, K. , El-Khoury, J. M., Simundic, A.-M., Farnsworth, C. W., Broell, F., Genzen, J. R., & Amukele, T. K. (2021). Evolution of blood sample transportation and monitoring technologies. Clinical Chemistry, 67,. [CrossRef]
- Pierre, C.; Wiencek, J. (2021). Sample Delivery to the Clinical Lab Neither Heat Nor Snow Nor Gravitational Force. Available online: https://myadlm.org/cln/articles/2021/june/sample-delivery-to-the-clinical-lab-neither-heat-nor-snow-nor-gravitational-force (accessed on 28 December 2025).
- Quadrat, Q., Chaperon, C., & Seydoux, H. (2019). Drone including advance means for compensating the bias of the inertial unit as a function of the temperature. US Patent 10191080B2.
- Sayarshad, H. R. , & Cakici, O. (2025). Equity-based vaccine delivery by drones: Optimizing pandemic response. Transportation Research Part E, 191,. [CrossRef]
- Sornek, K. , Augustyn-Nadzieja, J., Rosikoń, I., Łopusiewicz, R., & Łopusiewicz, M. (2025). Status and development prospects of solar-powered unmanned aerial vehicles—A literature review. Energies, 18(8),. [CrossRef]
- WHO. (2024). Introduction to WHO IMD PQS. World Health Organization. https://extranet.who.int/prequal/sites/default/files/document_files/introduction-who-imdpqs-2024-octweb.pdf.
- WHO. (2025a). Introduction to WHO IMD PQS Lite. World Health Organization. https://extranet.who.int/prequal/sites/default/files/document_files/Introduction%20to%20WHO%20IMDPQS%20LITE%20FEB2025.pdf.
- WHO. (2025b). Catalogue of prequalified immunization devices. World Health Organization. https://extranet.who.int/prequal/sites/default/files/media_document/immunization_devices_catalogue.pdf.
- Zaffran, M. , Vandelaer, J., Kristensen, D., Melgaard, B., Yadav, P., Antwi-Agyei, K. O., & Lasher, H. (2013). The imperative for stronger vaccine supply and logistics systems. Vaccine 31(B2), B73–B80. [CrossRef]
- Zhang, Z. , Chen, X., Li, H., & Wang, Y. (2025). Medical professionals’ acceptance of drone delivery for medical supplies: A cross-sectional study. Frontiers in Public Health, 13,. [CrossRef]
Figure 3.
Packaging and Workflow Stages.Figure 3. a (Top Left):Sterilized containers prepared in the laboratory before blood products are packaged for UAV transport.Figure 3b (Top Right):Sealed blood and sample containers ready for pickup and transfer, showing tamper-proof seals applied by medical staff.Figure 3c (Bottom Left):UAV pilot conducting quality control inspections of payloads, verifying integrity and compliance with internal packaging rules.Figure 3d (Bottom Right):Integration of samples into the three-phase UAV workflow, illustrating their journey from laboratory preparation to external UAV handling and delivery.Figures 3a and 3b represent the internal laboratory packaging phase, while Figures 3c and 3d depict the external payload control and dispatch phase, creating a comprehensive visualization of medical sample transportation.
Figure 3.
Packaging and Workflow Stages.Figure 3. a (Top Left):Sterilized containers prepared in the laboratory before blood products are packaged for UAV transport.Figure 3b (Top Right):Sealed blood and sample containers ready for pickup and transfer, showing tamper-proof seals applied by medical staff.Figure 3c (Bottom Left):UAV pilot conducting quality control inspections of payloads, verifying integrity and compliance with internal packaging rules.Figure 3d (Bottom Right):Integration of samples into the three-phase UAV workflow, illustrating their journey from laboratory preparation to external UAV handling and delivery.Figures 3a and 3b represent the internal laboratory packaging phase, while Figures 3c and 3d depict the external payload control and dispatch phase, creating a comprehensive visualization of medical sample transportation.
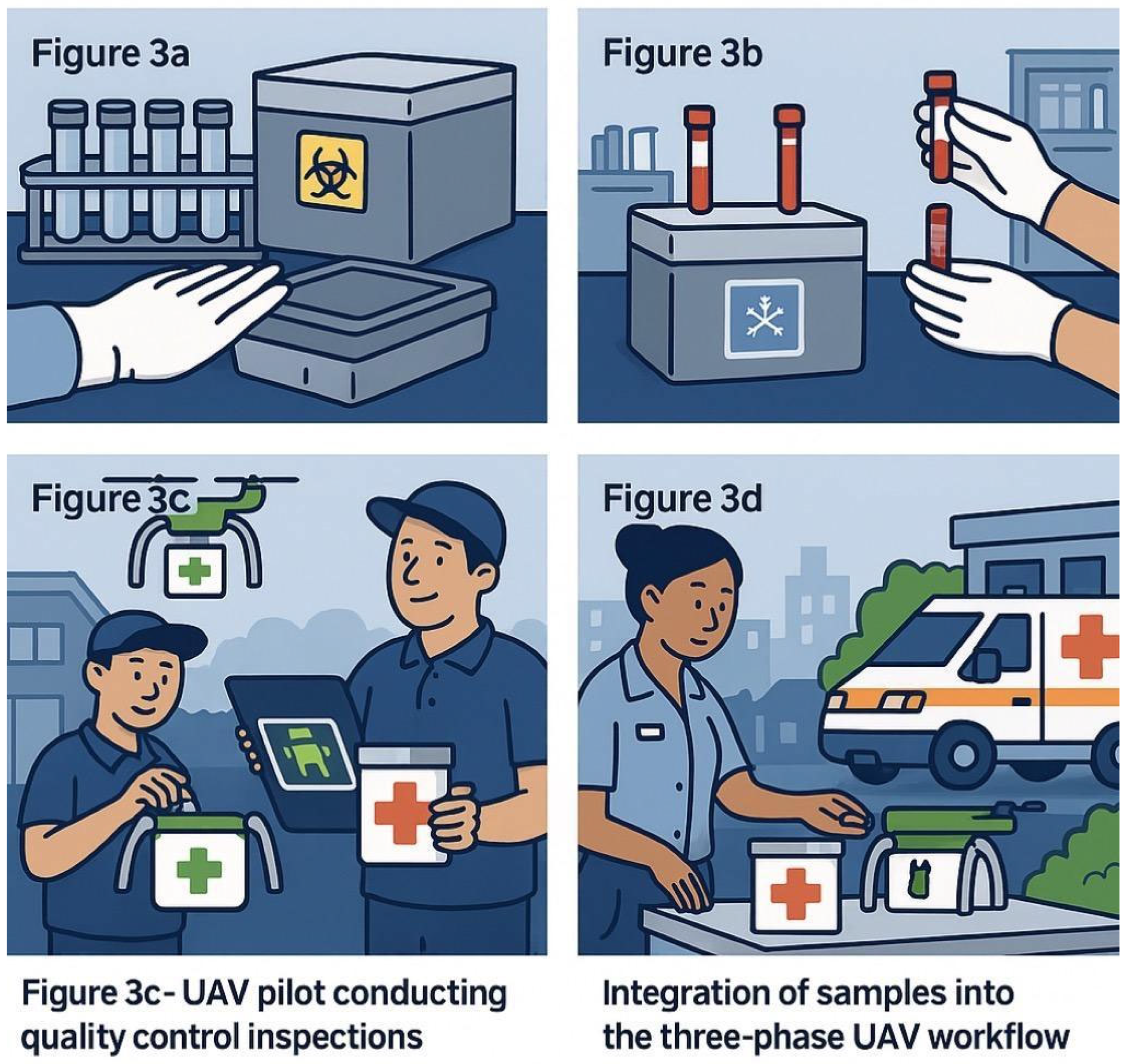
Figure 4.
Three Phases of UAV Medical Delivery Workflow.
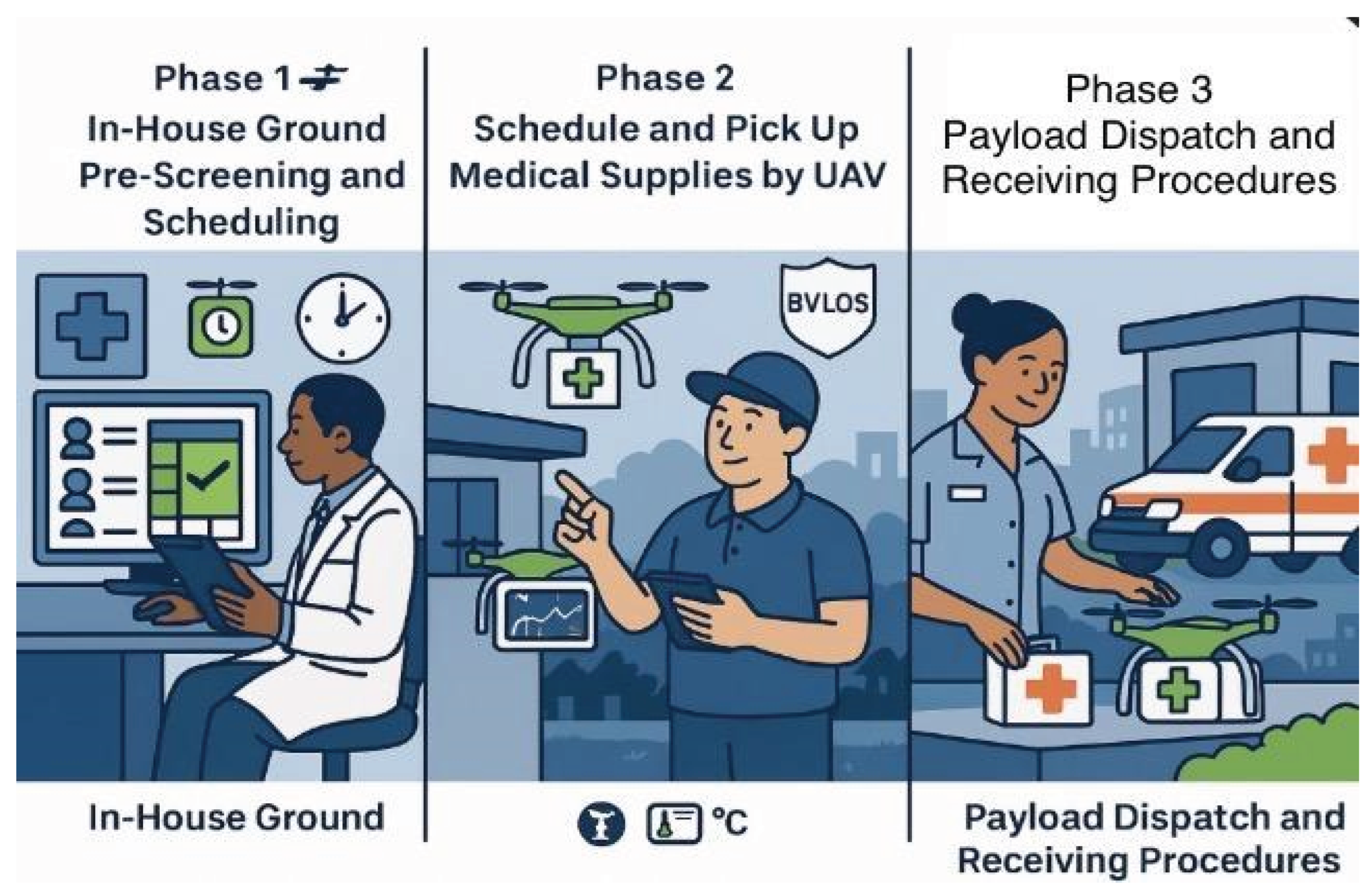
Table 3.
Performance Metrics Summary.
| Metric Category | Key Findings | Quantitative Results | Reference |
| Flight Performance | Continuous solar harvesting enabled near-continuous UAV operation with minimal downtime. | 95% operational availability; extended range by 32% over battery-only UAVs. | Sornek et al., 2025 |
| Cold-Chain Integrity | UAV maintained stable temperature profiles for vaccines and blood during transport. | Zero temperature excursions over a 36 km route. | Gauba et al., 2025 |
| Cost-Effectiveness | Improved efficiency reduced delivery costs and increased rural healthcare access. | 28% reduction in per-delivery costs; 20% increase in immunization coverage. | Ospina-Fadul et al., 2025 |
| Regulatory Compliance | Operations adhered to WHO PQS and ISO cold-chain standards with BVLOS flight approvals. | 100% compliance verified during field trials. | WHO, 2024; WHO, 2025 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



