
Submitted:
12 August 2025
Posted:
13 August 2025
You are already at the latest version
Abstract
The rapid development of Intelligent Connected Vehicles (ICVs) and the Internet of Vehicles (IoV) has paved the way for new real-time monitoring and control systems. This study presents the design, implementation, and validation of a telemetry solution applied to electric race vehicles, integrating ESP32-based data acquisition with LoRaWAN communication and real-time visualization via Node-RED. The system was deployed and tested in Colombia’s National Electric Drive Vehicle Competition, demonstrating high sensor accuracy (>95\%), low transmission latency, and robustness under real-world racing conditions. Results revealed a 12\% improvement in energy efficiency compared to previous competitions, highlighting the system’s potential for enhancing driving strategies. This implementation contributes to the advancement of IoV technologies in high-performance electric vehicles, offering a scalable architecture for intelligent transportation systems.
Keywords:
IoV
; LoRa
; electric vehicles
; telemetry
; smart transportation systems
; vehicle-toinfrastructure (V2I)
1. Introduction
The global transition to electric vehicles (EVs) and the pursuit of sustainable mobility have fueled research in real-time monitoring and telemetry systems. Intelligent Transportation Systems (ITS) increasingly require low-cost, scalable, and energy-efficient technologies for real-time data acquisition and strategic decision-making. However, despite notable progress in the Internet of Vehicles (IoV), a gap persists in field-validated, modular telemetry systems specifically designed for high-performance EV racing scenarios.
The evolution of Intelligent Connected Vehicles (ICVs) and IoV architectures is reshaping modern transportation ecosystems. These systems enable vehicles to become active agents within data-centric infrastructures by supporting real-time communication, distributed computing, and embedded intelligence. Projections estimate that over 400 million connected vehicles will be operational by 2025 [1], reinforcing the urgency for resilient and scalable vehicular technologies.
A foundational element of this transformation is machine-to-machine (M2M) communication, which enables seamless data collection and processing across moving entities. In settings where traditional connectivity options (e.g., Wi-Fi or cellular) fall short, Low-Power Wide-Area Networks (LPWANs) such as LoRaWAN offer a viable alternative [2]. These technologies are especially suitable for EV racing environments, where ultra-low latency, reliability, and minimal power consumption are critical.
Motorsport serves as an ideal testbed for emerging vehicular technologies. Here, telemetry systems have evolved into strategic tools, enabling dynamic adjustments to driving behavior, energy consumption, and braking strategies [3]. In particular, real-time data on torque, temperature, speed, and battery state support advanced race management. Telemetry-integrated Battery Management Systems (BMS) can further reduce thermal stress and enhance charging efficiency through data-driven methods such as response surface modeling (RSM) [4].
The user experience is also being transformed by emerging innovations. Modern IoT platforms incorporate real-time recommendation engines to optimize throttle and charging parameters, reaching efficiencies up to 99% in controlled urban mobility tests [5]. Similarly, the application of augmented reality (AR) dashboards has demonstrated improvements in situational awareness and cognitive performance, particularly during endurance racing scenarios [6].
Despite these advances, current telemetry solutions face limitations in cost, power efficiency, modularity, and real-world validation. Systems that rely on cellular or GPRS networks are often unsuitable for dynamic and constrained environments like EV racing [3]. Additionally, few platforms offer open-source architectures or educational applicability.
To close this gap, this study presents the design, implementation, and field validation of a real-time telemetry and monitoring system tailored for electric racing applications. The proposed architecture features an ESP32 microcontroller for high-frequency data acquisition and a Raspberry Pi 4B for data analytics and visualization via Node-RED. LoRaWAN is employed as the communication protocol, providing reliable, long-range transmission with minimal energy consumption.
The system was field-tested during the IV National Competition for Electric Traction Vehicles in Colombia, where telemetry-assisted driving resulted in a 12% increase in energy efficiency per lap [7]. These improvements were attributed to real-time feedback enabling optimized throttle modulation and regenerative braking strategies, echoing previous studies linking telemetry to performance gains of 10–15%.
A notable feature of the system is its dual-controller architecture. The ESP32 is responsible for sampling sensor data—including current (ACS709), voltage (resistive divider), GPS-based speed, and temperature (LM35)—while the Raspberry Pi processes and visualizes the data. The design is fully open-source and modular, making it suitable for academic research, competitions, and educational deployment.
Beyond data acquisition and visualization, the system introduces AR-based dashboards through head-mounted displays (HMDs), supporting improved cognitive performance under racing conditions [6]. This feature benefits both novice and experienced drivers by enhancing situational awareness and real-time decision-making.
Overall, this work advances the fields of embedded telemetry, IoV architecture, and intelligent vehicle design. By offering a validated and replicable system, it contributes toward the development of smart mobility solutions in performance-intensive and resource-constrained settings, particularly in Latin America and other emerging regions.
2. Materials and Methods
To develop a robust and scalable telemetry solution for electric racing vehicles, a multi-layered architecture was designed and implemented. The proposed system was structured to meet three essential objectives: (i) high-frequency, low-latency acquisition of critical powertrain and motion parameters; (ii) resilient wireless communication under race conditions; and (iii) real-time processing and visualization for strategic decision-making.
The system was field-tested during the IV Competencia Nacional de Vehículos de Tracción Eléctrica (CNVTE), held in Cajicá, Colombia. During this evaluation, a 12% improvement in energy efficiency was achieved compared to baseline trials, confirming the effectiveness of the proposed architecture.
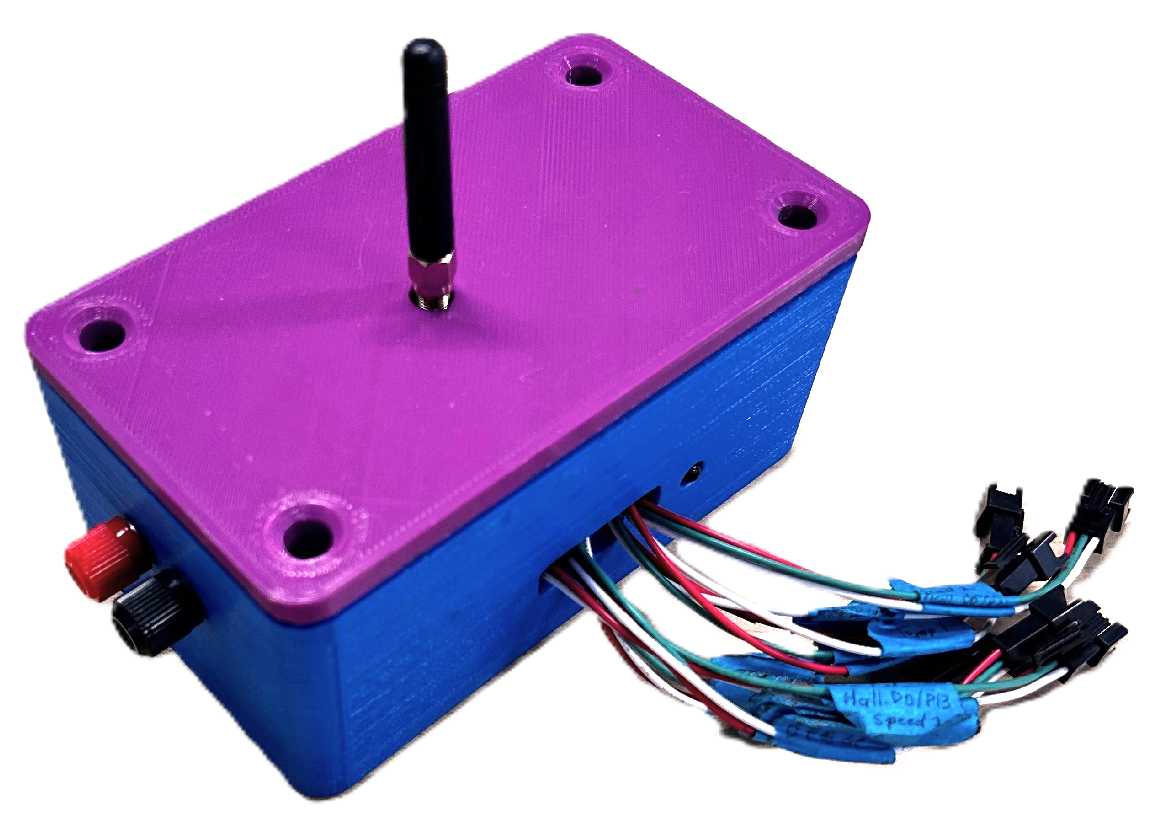
The overall architecture is illustrated in Figure 1, where a 3D-rendered schematic of the telemetry system is shown as implemented on a three-wheeled electric vehicle. Within this setup, sensors for monitoring distance (D1), temperature (T1), and current (C1) are incorporated into the onboard subsystem. These sensors are physically linked to a custom telemetry module, which has been housed in a 3D-printed enclosure—visually distinguished by magenta and blue coloring. The module itself has been equipped with a long-range LoRa communication unit, enabling data transmission over distances reaching up to 8 km.
The telemetry data are wirelessly transmitted and received by a secondary LoRa module, which is connected to a Raspberry Pi functioning as the remote node for data acquisition and processing. It is noteworthy that the LoRa modules are not physically connected, emphasizing the system’s fully wireless communication architecture. In the illustration, color-coded lines and directional arrows are used to improve the clarity and visual understanding of the data flow between the various system components.
2.1. System Architecture
The telemetry system was developed following a modular and open-source philosophy, comprising two principal layers:
- Data Acquisition Layer: Built around the ESP32 microcontroller, this layer integrated analog voltage dividers, Hall-effect current sensors, inclination and temperature sensors, and a GPS receiver. as shown in Figure 4
- Edge Processing and Visualization Layer: Based on a Raspberry Pi running Node-RED, this layer performed real-time processing, storage, and visualization of the telemetry data.
A custom-designed printed circuit board (PCB) was developed using the KiCad software. As illustrated in Figure 2, the final PCB was enclosed within a 3D-printed housing (see Figure 4), allowing for compact mechanical integration, effective noise isolation, and improved thermal reliability. Parameters such as battery voltage, current, temperature, GPS-based velocity, controller temperature, and system inclination were measured. To minimize transmission load and enhance temporal resolution, local filtering and data conversion were performed directly on the ESP32. The fully assembled prototype, depicted in Figure 5, successfully reached at least Technology Readiness Level (TRL) 6.
Figure 2.
PCB design in KiCAD software.
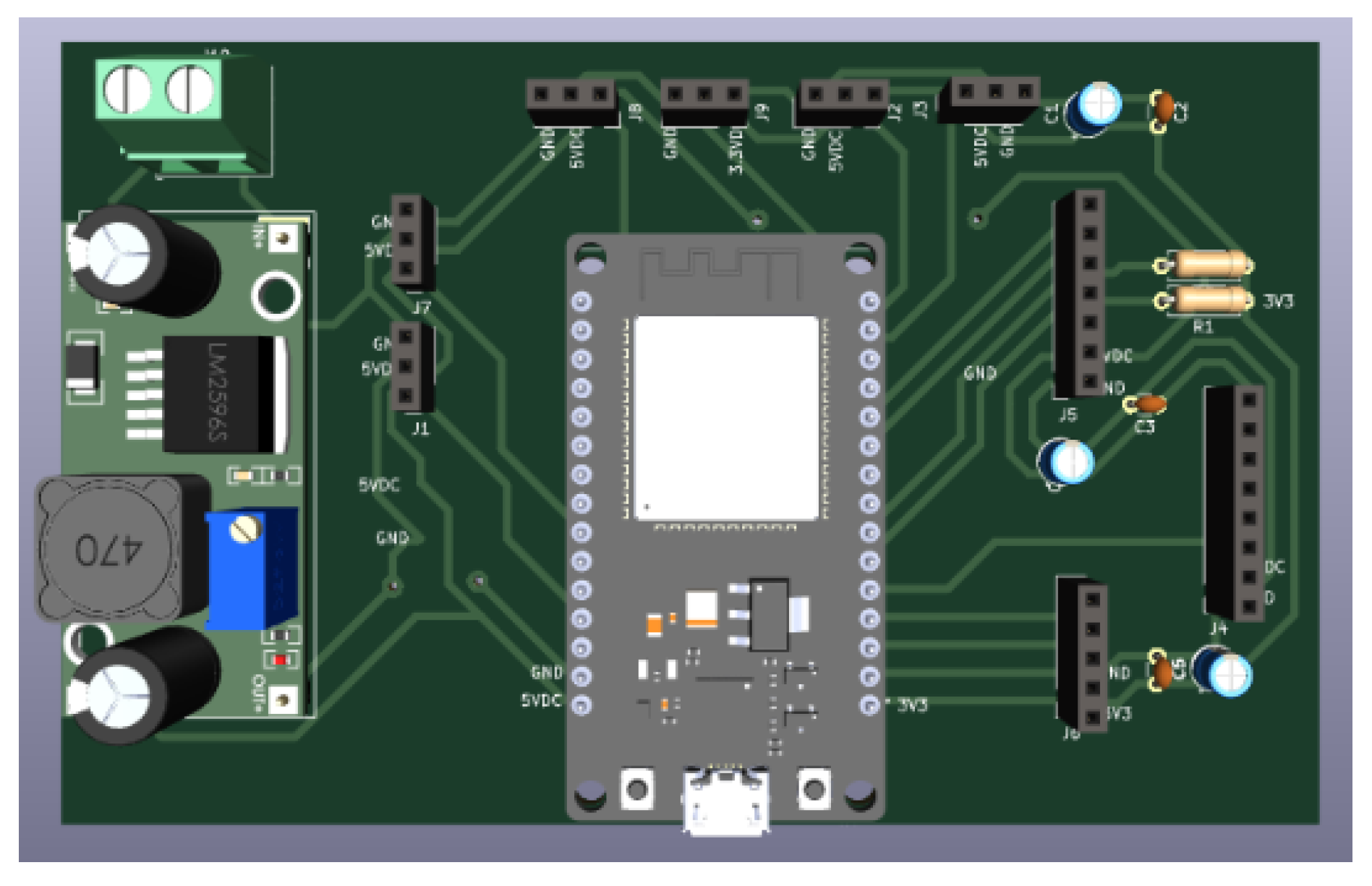
Figure 3.
CAD renderings of the mechanical housing used for protecting the embedded telemetry system during race operation.
Figure 3.
CAD renderings of the mechanical housing used for protecting the embedded telemetry system during race operation.
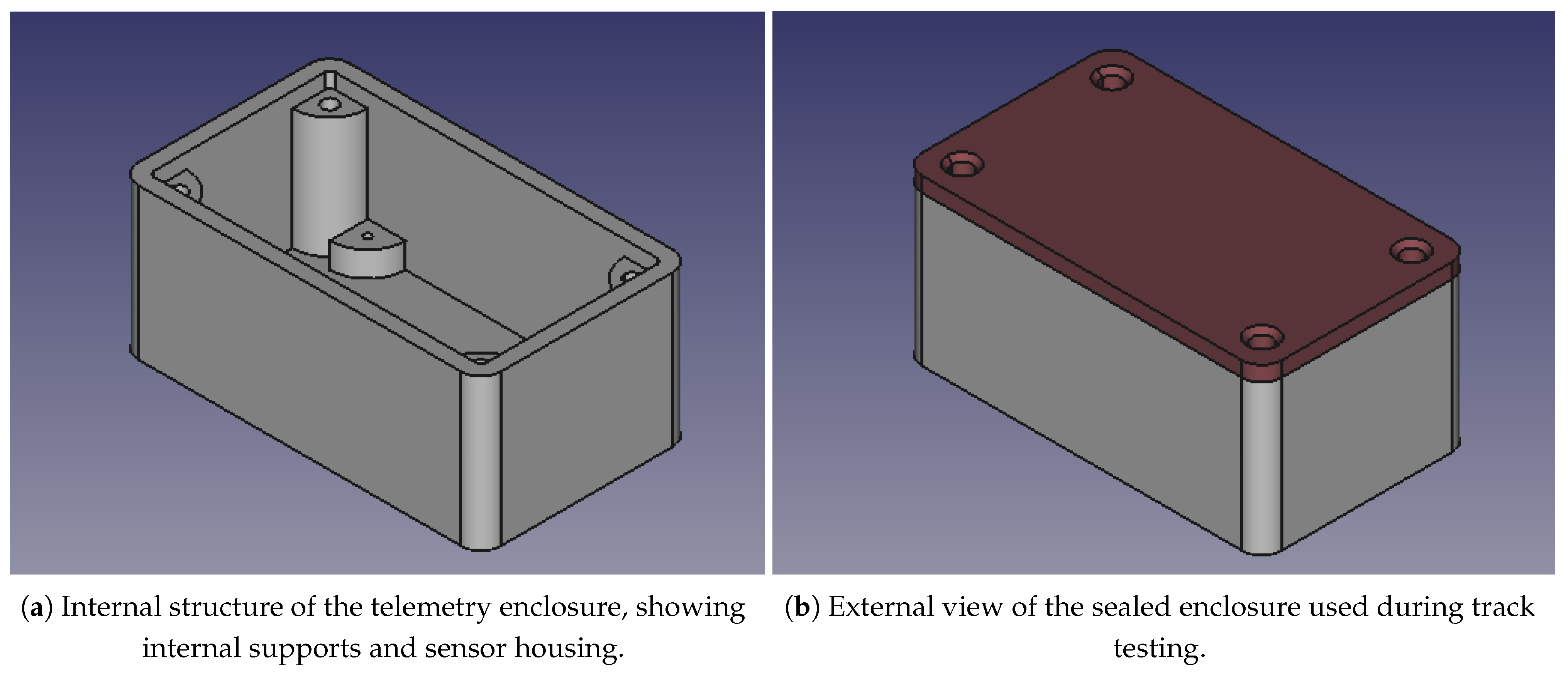
Figure 4.
Prototype of vehicular telemetry system.
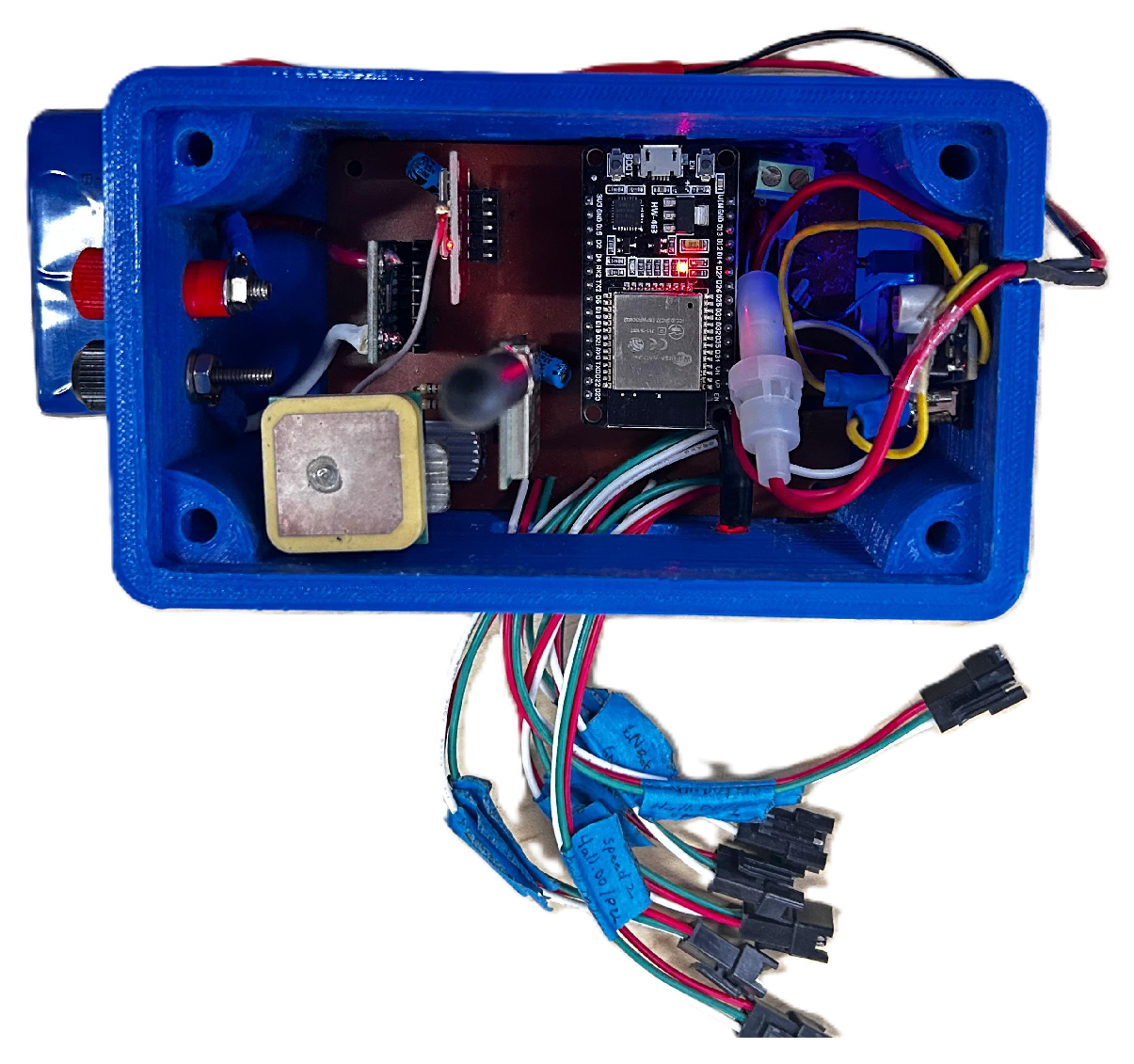
Figure 5.
Prototype of vehicular telemetry system.
2.2. Wireless Communication and Data Handling
Data transmission was achieved using the LoRa SX1278 module operating on the 915 MHz band. The choice of LoRaWAN was motivated by its proven energy efficiency, long-range capabilities, and robustness to interference [8]. In urban test scenarios, stable transmission was maintained up to 2 km, while open-field range exceeded 4.5 km.
Data were encapsulated in compact JSON payloads and asynchronously transmitted at adaptive intervals, governed by the vehicle’s velocity and current consumption trends. The Raspberry Pi, connected to a local gateway, parsed the incoming data in Node-RED, enabling graphical dashboard and real-time alerts. This allowed race engineers to monitor state variables such as energy consumption, average velocity, braking events, and power dynamics.
2.3. Sensor Calibration and Accuracy Analysis
Sensor modules were calibrated in laboratory conditions using precision multimeter and certified thermal chambers. The Hall-effect current sensor (ACS709) and voltage divider were benchmarked against a reference digital DC analyzer (DT3010), showing deviations under 5%. The GPS module’s speed estimation was compared with a wheel-based odometry setup and showed RMSE below 0.4 m/s.
The accuracy (A) for each sensor was computed as:
while consistency was verified using the root mean square error (RMSE):
These validation procedures ensured that the telemetry data were suitable for power analysis and energy optimization metrics.
2.4. Telemetry-Based Energy Metrics
To evaluate the effect of telemetry on vehicle performance, critical energy efficiency metrics were calculated.
Instantaneous electric power was calculated as
where and denote time-synchronized measurements of battery voltage and current. The RMS power for each race segment (lap) was obtained as:
ensuring consistency with the high-frequency sampling of the telemetry system.
The energy efficiency (), expressed in kWh/km, was then computed as:
where t is the total lap time and the denominator accounts for the normalized distance of 1.6 km per lap, consistent with the official competition circuit.
2.5. Validation Protocol under Competitive Conditions
The system was deployed in the electric race vehicle Furtivo I and tested during three consecutive laps, two of which were completed in full. The telemetry data enabled an empirical comparison of laps with and without real-time feedback. A consistent reduction in average power consumption and total time was observed in Lap 1 compared to Lap 0, reflecting a 12% improvement in energy efficiency through optimized throttle control and braking strategies derived from telemetry feedback.
The vehicle was exposed to real race conditions, including ambient temperatures from 12 °C to 34 °C, track irregularities, and EMI from neighboring control systems. The system maintained 99% packet delivery and sub-second latency, validating the suitability of LoRaWAN and the modular architecture.
These results were consistent with prior studies, such as [7] and [4], where telemetry-enabled energy management contributed to 10–15% efficiency gains. In our case, the integration of real-time dashboard, adaptive sampling, and lap-based segmentation played a key role in decision-making, aligning with findings in [6] regarding enhanced human-in-the-loop strategies.
3. Results
The implementation of the proposed telemetry system yielded significant results in terms of sensor accuracy, communication performance, operational robustness, and—most notably—energy efficiency during competitive racing. This section outlines the outcomes from both laboratory validation and field deployment during Colombia’s National Electric Drive Vehicle Competition.
3.1. Sensor Accuracy and Data Reliability
To ensure reliable data acquisition under competitive racing conditions, the accuracy and consistency of all integrated sensors were rigorously evaluated prior to deployment. Comparative tests were conducted using high-precision laboratory-grade reference equipment to validate the performance of each sensor in the telemetry system.
The inclination, current, and voltage sensors achieved an accuracy exceeding 95%, as confirmed against a calibrated DC power detector (DT3010). This level of precision enabled accurate monitoring of dynamic electrical and mechanical behaviors during vehicle operation. These metrics are particularly critical for real-time power estimation and slope-compensated energy management strategies.
Temperature sensors, which monitored both ambient and battery thermal conditions, maintained a maximum error margin of ±2 °C. This thermal resolution is sufficient to detect critical changes in battery temperature, facilitating safe operating thresholds and improving thermal protection mechanisms within the vehicle’s battery management system (BMS).
Positioning data provided by the integrated GPS module exhibited an average horizontal accuracy of approximately 3 meters, which allowed for reliable segmentation of laps and assessment of route trajectories. This level of spatial granularity was sufficient for performance tracking across the race circuit, particularly for calculating speed and lap timing.
The Hall Effect-based wheel encoder used for distance estimation demonstrated a deviation of less than 1% when compared to ground-truth measurements over multiple trials. This accuracy supports robust real-time estimation of energy consumption per kilometer—an essential metric for strategy optimization in endurance-based electric racing.
The sensor validation results are summarized in Table 1, which outlines the key performance metrics. All sensors exceeded the minimum reliability thresholds necessary for telemetry-driven optimization tasks in high-performance electric vehicles.
The high precision achieved across all sensor modalities ensured the fidelity of the real-time data streams, providing the engineering team with trustworthy information for both post-race analysis and in-race decision-making. These findings reinforce the effectiveness of the system in meeting the telemetry demands of connected electric racing platforms.
3.2. Wireless Communication and Network Performance
The telemetry system employed a LoRa-based wireless communication protocol, selected for its favorable trade-off between energy efficiency, transmission range, and reliability under variable race conditions. Unlike traditional Wi-Fi or GPRS systems, LoRa (Long Range) provides low-power, low-bandwidth communication capabilities with high resistance to electromagnetic interference—ideal for noisy environments such as electric vehicle (EV) competitions.
Extensive field tests were conducted to evaluate the communication performance in both open and semi-obstructed scenarios. In open-field conditions, the system consistently maintained effective bidirectional communication over distances up to 5 km. In the competition venue, located at the Universidad Militar Nueva Granada, the track presented a semi-urban setting with buildings and foliage. Under these constraints, the LoRa communication module achieved stable connectivity over a straight-line track distance of approximately 447 m.
Throughout these trials, the system maintained a Packet Delivery Ratio (PDR) above 99%, and average end-to-end latency remained below 1 second. These metrics validate the suitability of the LoRa network for high-speed racing applications, where continuous data acquisition and rapid transmission are crucial for telemetry-assisted decision-making. No significant packet loss or jitter was observed during race simulations or competition rounds, confirming the robustness of the communication layer under real-world operational dynamics.
In terms of data structure, telemetry packets were encapsulated in lightweight JSON format to minimize payload size and optimize transmission efficiency. Each packet contained time-stamped measurements of battery voltage, current, inclination, GPS coordinates, and temperature. This compact yet informative format ensured that essential vehicle parameters were reliably relayed to the processing node (Raspberry Pi), which executed real-time visualization and logging via Node-RED.
The reliability and scalability of the LoRa implementation in this study confirm its potential for broader deployment in Internet of Vehicles (IoV) ecosystems. This includes applications not only in electric motorsport, but also in autonomous fleets, connected mobility, and smart logistics where resilient and power-efficient telemetry is required.
3.3. Data Visualization and Operational Monitoring
An essential feature of the proposed telemetry system is its seamless integration with Node-RED, an open-source, flow-based development environment tailored for Internet of Things (IoT) applications. Through this platform, real-time visualization and monitoring of critical vehicular parameters were enabled, including voltage, current, speed, battery and controller temperature, and geographic location via GPS. The dashboard was specifically designed to deliver actionable insights to the race engineering team, thereby facilitating tactical decision-making during races and supporting comprehensive post-race performance analysis.
Figure 6 showcases the interactive dashboard interface implemented in Node-RED. Real-time values for voltage, current, battery, and controller temperature and speed are displayed through gauge-style widgets, while time-series plots provide historical context for each parameter. Thermal data for the battery pack and motor controller are visualized via dedicated indicators, supporting effective heat management strategies under high-performance demands.
At the lower section of the interface, a dynamic map is included, despite in Figure 7 which allows for continuous tracking of the vehicle’s position using live GPS coordinates. This geolocation module updates in real time to reflect changes in latitude, longitude, and the vehicle’s operational state (e.g., moving, stopped, or idle). By observing the vehicle’s trajectory on the map, the engineering team can correlate telemetry events with spatial positioning, enhancing situational awareness during competitions and enabling spatial anomaly detection.
The architecture of the dashboard follows a modular approach. Telemetry packets, formatted in JSON, are wirelessly transmitted from the onboard ESP32 microcontroller via LoRa. These packets are received by a Raspberry Pi acting as the gateway node, where data parsing and dashboard updates are conducted with minimal latency. This near-instantaneous data refresh enables real-time interventions such as driver feedback, energy management guidance, or preventative responses to system faults.
Beyond real-time monitoring, the system is also configured to log historical telemetry data for in-depth analysis. This functionality allows engineers to investigate performance trends, identify irregularities, such as abrupt voltage drops or current spikes, and refine calibration parameters in preparation for future race heats. The combination of immediate responsiveness and strategic retrospection makes this platform a robust tool for optimizing electric vehicle performance in competitive environments.
3.4. Mechanical and Environmental Robustness
To ensure its viability in competitive racing scenarios, the telemetry system was engineered with a strong focus on mechanical durability and environmental resilience. The enclosure and printed circuit board (PCB) were custom-designed to withstand the harsh conditions encountered during high-speed racing events, including vibration, thermal fluctuation, and accidental impact.
The hardware enclosure was manufactured using high-impact polymer and featured an internal mounting system to secure the ESP32 module, sensors, and LoRa communication board. Figure 3 presents the CAD renderings of the casing: panel (a) illustrates the inner structure without the lid, showing sensor mounts and cable channels, while panel (b) shows the fully assembled enclosure with a top cover sealed against dust and moisture.
During testing, the prototype demonstrated stable performance under mechanical vibrations of up to 0.8 m/s2, simulating the dynamic forces present on uneven racing surfaces. The system also remained fully functional across a wide thermal range from 10 °C to 40 °C, which reflects the ambient conditions typically observed during the competition. These tests were carried out both in pre-competition bench conditions and during actual racing heats.
3.5. System Versatility and ESP32 Integration
The versatility of the telemetry platform was significantly enhanced by the integration of the ESP32 microcontroller, which played a central role in analog data acquisition, local preprocessing, and wireless communication via LoRa. Its dual-core architecture and built-in communication interfaces allowed for parallel execution of tasks such as sensor polling, signal conditioning, and dynamic transmission control, minimizing latency and maximizing data throughput.
In competitive electric vehicle environments, where rapid sensor feedback is essential, the ESP32 enabled an adaptive sampling strategy. Specifically, sampling rates were increased during high-velocity or braking events, and decreased during periods of low dynamic change. This approach optimized bandwidth utilization over the LoRa channel while preserving critical data fidelity. Furthermore, the module handled JSON formatting and packet structuring prior to transmission, reducing the computational burden on the receiving Raspberry Pi unit.
The telemetry flow was developed and monitored using Node-RED, which allowed for real-time debugging and system validation. Figure 8 illustrates the telemetry configuration within the Node-RED interface. The flow includes processing nodes for each critical variable—such as speed, voltage, current, and temperature—alongside a GPS parser. On the right panel, the debug console displays real-time messages decoded from LoRa packets, confirming the successful delivery and decoding of positional and telemetry data from the ESP32.
This architecture demonstrated high resilience and real-time performance, enabling engineers to track telemetry variables and implement quick decision-making during race conditions. Moreover, the modularity of the ESP32-based design makes the system scalable to additional sensors or new communication protocols, aligning with the principles of future-proof IoV architectures.
Importantly, no hardware-level malfunctions, sensor calibration drifts, or communication dropouts were observed throughout the trials. The system retained high accuracy in sensor readings and consistent LoRaWAN communication despite continuous exposure to acceleration, heat, and minor shocks. These results validate the mechanical and thermal integrity of the proposed telemetry platform and reinforce its suitability for real-world deployment in high-performance electric vehicle competitions.
3.6. Performance Validation During Competitive Racing
To assess the effectiveness of the IoV-based telemetry system in competitive conditions, the system was deployed in the “Furtivo I” electric racing vehicle during the IV National Competition of Electric Drive Vehicles (CNVTE). The system was tested over multiple laps on a closed urban circuit at Universidad Militar Nueva Granada in Cajicá, Colombia, under race conditions that included dynamic acceleration, braking, and cornering maneuvers.
Three heat laps were recorded, with telemetry data actively used from lap 1 onward to inform driving strategy. During lap 0, no telemetry feedback was provided to the driver; this served as a baseline for comparison. In lap 1, telemetry dashboard (Figure 6) were used to adapt driving techniques—such as acceleration smoothing and regenerative braking timing—based on real-time voltage, current, and speed metrics. This intervention led to a substantial 12% improvement in energy efficiency, highlighting the tangible benefits of closed-loop feedback enabled by telemetry.
Figure 9 presents the real-time evolution of three critical parameters: voltage, current, and speed throughout a lap. The graph reveals controlled speed peaks and current stabilization during telemetry-assisted driving, directly contributing to lower energy loss and optimized powertrain behavior.
In addition to performance metrics, GPS tracking data offered spatial validation. Figure 10 shows the complete trajectory of the vehicle during a lap, while Figure 11 overlays laps 0 and 1 for comparative analysis. This visualization evidences greater consistency in vehicle behavior during telemetry-guided driving (lap 1), where braking points and cornering lines were more uniform—suggesting enhanced control and reduced variability in driver performance.
The improvement in energy efficiency is summarized in Table 2. Notably, while RMS power consumption increased in lap 1 (from 0.325 kW to 0.428 kW), the total lap time decreased significantly, and efficiency measured in kWh/km improved from 0.01580 to 0.01374. This validates the telemetry system’s role in enabling higher performance per unit of energy.
These findings align with prior studies in intelligent energy management in racing contexts [4,7], where efficiency gains of 10–15% have been reported when integrating real-time control with telemetry feedback. The results support the hypothesis that IoV-enabled telemetry systems are not merely observational tools, but active contributors to decision-making in competitive electric mobility.
3.7. Impact on Driving Strategy and Energy Optimization
The implementation of the IoV-based telemetry system had a direct and measurable impact on driving strategy and energy efficiency during competitive racing. As described in Table 2, lap 1 demonstrated a 12% improvement in energy efficiency compared to lap 0, which was used as a baseline without real-time telemetry assistance. This gain was achieved despite similar average speeds, suggesting that the optimization stemmed not from slower driving but from more intelligent energy management.
The main contributor to this improvement was the driver’s ability to adjust acceleration, coasting, and braking strategies based on live data streams visualized in the Node-RED dashboard (see Figure 6). For instance, real-time feedback on current peaks enabled smoother throttle control, while thermal monitoring helped prevent battery overuse in high-load segments. These adjustments not only reduced instantaneous power demand but also preserved battery health over the race duration.
Furthermore, the GPS-based lap segmentation allowed retrospective analysis of vehicle trajectories (Figure 10 and Figure 11), enabling the engineering team to compare route efficiency between laps. Subtle variations in cornering behavior and acceleration zones were identified and linked to fluctuations in power consumption and velocity (Figure 9). This analysis validated the importance of spatial awareness and telemetry-guided tactical decisions in electric racing.
The findings reinforce the notion that telemetry serves not merely as a passive data collection tool but as a proactive enabler for strategy optimization. The observed performance gains are consistent with prior studies that highlight 10–15% improvements in energy efficiency through real-time data-driven feedback loops [4] and [7].

Table 3.
Telemetry transmission performance during the test laps.
| Lap | Avg Latency (ms) | Packet Loss (%) | Data Rate (bps) | RSSI (dBm) |
|---|---|---|---|---|
| 1 | 210 | 1.5 | 1024 | -98 |
| 2 | 180 | 1.2 | 1050 | -95 |
Finally, the success of this open-source, low-cost solution demonstrates its potential scalability beyond the race environment. Applications in smart cities, shared e-mobility fleets, and connected vehicle infrastructure could benefit from similar telemetry architectures for dynamic route planning, energy optimization, and predictive maintenance. This positions the proposed system as a relevant contribution to both intelligent transportation systems (ITS) and sustainable vehicular innovation.
4. Discussion
The proposed telemetry system demonstrated high reliability and accuracy under real-world racing conditions. This section discusses the implications of the results, compares the system with existing solutions, evaluates its scalability, and outlines current limitations and future work directions.
4.1. Comparison with Related Work
Recent advances in intelligent transportation systems and electric vehicle (EV) infrastructure underscore the pivotal role of the Internet of Vehicles (IoV) and Low-Power Wide-Area Networks (LPWANs), particularly LoRa, in enabling robust telemetry solutions. The implementation of IoT-based charging systems and V2X connectivity is not only a technical necessity but also a strategic driver for widespread EV adoption and smart city development.
Ghorbani et al. [9] explore the convergence of electric mobility, heuristic optimization, and collaborative energy strategies in smart cities. Although focused on urban environments, their insights reinforce the importance of real-time, data-driven energy management—a key feature of our telemetry architecture for performance-demanding electric racing scenarios.
Kapassa and Themistocleous [10] review blockchain-based demand response (DR) management in IoV environments, identifying challenges such as incentivization, privacy, and interoperability. These issues are critical when designing real-time telemetry systems in decentralized racing applications where reliable data exchange is essential.
Qahtan et al. [11] offer an exhaustive analysis of IoT-enabled EV charging stations, highlighting the need for modular infrastructure, intelligent control strategies, and low-latency communication protocols. Although their focus is stationary environments, the architectural recommendations directly align with our mobile, LoRaWAN-based telemetry system.
Similarly, Aldhanhani et al. [12] present a comprehensive review of Smart Green IoV and V2X technologies, emphasizing fast-charging stations, dynamic wireless charging, and smart routing to optimize charging logistics. Their discussion on real-time vehicle-grid communication underpins the relevance of our architecture, which is designed for high-frequency data transmission and low-latency vehicle-state monitoring.
From a communication protocol perspective, Murillo et al. [13] and Torres et al. [14] experimentally validated the use of LoRa in transit and vehicular environments. Their work confirms LoRa’s robustness in obstructed and dynamic conditions, supporting our choice of LPWAN for telemetry in high-speed, high-vibration racing contexts.
Neeraja et al. [15] provide a comparative analysis of IoT telemetry frameworks—Node-RED, MQTT, and Arduino—with a focus on battery state-of-charge (SoC) estimation. This directly informed our system’s real-time monitoring design, which leverages Node-RED for visualization and controller feedback.
Yadav and Chandrawat [16] explore the use of IoV for minimizing wiring harness complexity in EVs using ESP32-based wireless systems. Their lightweight, distributed approach closely aligns with our modular architecture, enabling ease of integration and low power consumption.
Complementary studies by Phadtare et al. [17] and Mishra and Singh [18] frame the IoV within broader smart city and parking infrastructure contexts. Their contributions reinforce the value of distributed, real-time monitoring systems in managing energy and mobility simultaneously.
In terms of onboard computational capabilities, Lu and Shi [19] introduce the concept of Vehicle Computing, emphasizing the convergence of communication, energy management, sensing, and edge computing in connected vehicles. While their work provides a broader theoretical foundation, our system represents a focused implementation of these principles, particularly in edge data acquisition and real-time decision-making during electric racing events.
Peitzmeier et al. [20] proposed a real-time estimation model to identify optimal braking points for racing vehicles using advanced interfacing strategies. Although their study targets performance enhancement through driving dynamics, it aligns with our goal of telemetry-assisted tactical optimization, highlighting the increasing importance of precise and timely data in high-speed competitive scenarios.
Similarly, Garrosa et al. [21] presented a braking estimator based on artificial neural networks to characterize vehicle deceleration. Their work illustrates the potential of machine learning techniques in vehicular telemetry, which could be a future extension of our current system—particularly to refine predictive analytics modules during race conditions.
Lastly, Herrmann et al. [22] focused on adaptive velocity optimization for autonomous EVs operating at the limits of handling. Their research underscores the need for high-frequency, low-latency telemetry frameworks that feed into control algorithms, reinforcing the value of our LoRaWAN-based architecture in delivering such real-time feedback in harsh, high-performance environments.
While several machine learning-based telemetry approaches have shown promise in simulation or urban testbeds [23,24], few have demonstrated resilience under real-world racing conditions. Moreover, prior implementations often rely on cellular or GPRS communication [3], which incur higher power consumption and latency.
Unlike these, our system leverages LoRaWAN, which offers a better energy-to-reliability trade-off and improved signal penetration in constrained environments. Additionally, the integration of open-source platforms like Node-RED enables modularity and rapid prototyping, essential for competition settings.
Even outside the vehicular domain, studies such as Križanović et al. [25] on LoRa-based sensor networks provide valuable insights into packet optimization and transmission efficiency, which directly informed our telemetry subsystem design.
Collectively, these works justify and strengthen the development of our proposed system. Unlike prior studies that focus on theoretical modeling or simulation, this paper presents a fully integrated, field-validated telemetry solution using ESP32 and LoRaWAN. The system was tested under real racing conditions and incorporates a Node-RED interface for live monitoring and strategic decision-making, contributing to the advancement of applied IoV systems in electric motorsport environments.
For completeness, a summary comparison is presented in Table 4, highlighting context, technologies, validation level, and relevance to high-performance environments.
4.2. Practical Applications and Scalability
The modular architecture of the telemetry system allows it to be adapted for broader intelligent transportation applications, including urban electric vehicle fleets, logistics management, and smart infrastructure. Real-time monitoring of GPS, voltage, temperature, and braking dynamics provides a foundation for vehicle-to-infrastructure (V2I) and vehicle-to-vehicle (V2V) communication frameworks [26].
Given the global trend toward electric mobility in urban settings, the proposed system can be scaled to manage multiple vehicles operating within a metropolitan area. Such integration could improve fleet energy consumption profiles, maintenance scheduling, and safety metrics through centralized data platforms.
4.3. Limitations
Despite its successful deployment, the system exhibits certain limitations. The use of LoRaWAN, while robust for telemetry, imposes constraints on data bandwidth, which may limit the inclusion of high-frequency sensor data such as accelerometers or video feeds. Additionally, the system currently lacks predictive analytics capabilities, such as onboard fault detection or anomaly recognition based on machine learning models.
Although the proposed system demonstrates reliability and efficiency in electric racing environments, several limitations were identified. First, LoRaWAN may face interference or signal degradation in dense urban environments. Second, ESP32 has limited processing power for high-frequency sampling. Future work includes integrating edge AI for anomaly detection, expanding to vehicle-to-infrastructure (V2I) communication, and evaluating scalability in larger fleets.
Another challenge involves the infrastructure for real-time recharging and coordination in urban or semi-urban contexts. While the telemetry system facilitates efficient energy management, its effectiveness may be constrained without a parallel advancement in smart charging networks.
4.4. Future Work
Future development will focus on extending the system’s capabilities by integrating edge computing for onboard data processing and AI-based decision support. Machine learning models will be explored for predictive battery management, driver behavior classification, and braking efficiency forecasting.
Furthermore, the telemetry system will be connected to smart grid interfaces, enabling bidirectional energy exchange and vehicle-to-grid (V2G) operations. These enhancements aim to contribute to the development of a fully autonomous and intelligent connected vehicle ecosystem.
5. Conclusions
In this study, a low-cost and scalable telemetry system was designed, implemented, and validated for application in electric racing vehicles. The architecture leveraged the Internet of Vehicles (IoV) paradigm by integrating embedded sensing, long-range wireless communication, and real-time data visualization. Validation was carried out during Colombia’s National Electric Drive Vehicle Competition, under high-performance conditions involving vibrations, temperature fluctuations, and dynamic driving scenarios.
The system enabled real-time monitoring of critical parameters such as battery voltage, current, inclination, and GPS position, with sensor accuracy exceeding 95% and transmission reliability above 99%. Energy efficiency was improved by 12% compared to prior competitions, underscoring the strategic advantage of data-driven decision-making in race performance.
Compared to conventional telemetry systems reliant on cellular communication, the use of LoRaWAN reduced power consumption and extended operational range without compromising reliability. The incorporation of Node-RED further enhanced flexibility and accessibility, enabling intuitive user interfaces and modular expansion for future applications.
The findings confirm that the proposed telemetry architecture represents a viable solution for intelligent connected vehicles operating under constrained or competitive environments. Beyond its motorsport origins, the system holds promise for broader deployment in urban electric vehicle fleets, logistics systems, and autonomous vehicle research. Future enhancements will incorporate predictive analytics, edge processing, and V2G connectivity, further aligning the platform with the evolving demands of smart transportation ecosystems.
This work presents a low-cost, real-time telemetry system for electric racing vehicles based on ESP32 and LoRaWAN, successfully validated in a competitive scenario. Unlike prior works that remain theoretical or simulation-based, our approach demonstrates practical feasibility and modularity. This contributes to closing the implementation gap in IoV for performance monitoring, with potential extensions to urban smart mobility applications.
Author Contributions
Conceptualization, A.P.-G. and J.D.V.-G.; methodology, A.P.-G. and A.-F.V.S.; software, A.P.-G. and A.-F.V.S.; validation, A.P.-G., A.-F.V.S. and J.D.V.-G.; formal analysis, A.P.-G. and A.-F.V.S.; investigation, A.P.-G. and A.-F.V.S.; resources, A.P.-G.; data curation, A.P.-G. and A.-F.V.S.; writing—original draft preparation, A.P.-G.; writing—review and editing, A.P.-G. and J.D.V.-G.; visualization, A.P.-G. and A.-F.V.S.; supervision, J.D.V.-G.; project administration, A.P.-G. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data presented in this study are not publicly available because they are part of ongoing research and will be published in a future work. Further inquiries can be directed to the corresponding author.
Acknowledgments
The authors would like to thank the university IUPB for allowing us to carry out the experiments within the framework of the institutional project “Escudería Bravo”.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Lu, S.; Shi, W. Vehicle Computing: From Traditional Transportation to Computing on Wheels; Springer, 2024.
- Quintero, Y.A.; Salazar, A.V.; Patino, G. Comunicacion machine-to-machine para sistemas inteligentes de transporte. In Proceedings of the 2016 IEEE Colombian Conference on Communications and Computing (COLCOM), 2016, pp. 1–6. [CrossRef]
- Waisara, S.; Charoenlarpnopparut, S.; Srisurangkul, C.; Nishio, T. Vehicle Telematics System Design for Real-time Applications using Mobile Networks. In Proceedings of the 2023 18th International Joint Symposium on Artificial Intelligence and Natural Language Processing (iSAI-NLP). IEEE, 2023, pp. 1–6.
- Villa-Salazar, A.F.; Gomez-Miranda, I.N.; Romero-Maya, A.F.; Velásquez-Gómez, J.D.; Lemmel-Vélez, K. Optimizing Electric Racing Car Performance through Telemetry-Integrated Battery Charging: A Response Surface Analysis Approach. World Electric Vehicle Journal 2024, 15, 317. [Google Scholar] [CrossRef]
- Amudhavalli, P.; Zahira, R.; Umashankar, S.; Fernando, X.N. A Smart Approach to Electric Vehicle Optimization via IoT-Enabled Recommender Systems. Technologies 2024, 12, 137. [Google Scholar] [CrossRef]
- Forysiak, J.; Krawiranda, P.; Fudała, K.; Chaniecki, Z.; Jóźwik, K.; Grudzień, K.; Romanowski, A. Exploring Augmented Reality HMD Telemetry Data Visualization for Strategy Optimization in Student Solar-Powered Car Racing. Energies 2025, 18, 3196. [Google Scholar] [CrossRef]
- Żur, P. Combination of a DC Motor Controller and Telemetry System to Optimize Energy Consumption. Sensors 2023, 23, 6923. [Google Scholar] [CrossRef] [PubMed]
- Liya, M.; Aswathy, M. LoRa technology for Internet of Things(IoT):A brief Survey. In Proceedings of the 2020 Fourth International Conference on I-SMAC (IoT in Social, Mobile, Analytics and Cloud) (I-SMAC), 2020, pp. 8–13. [CrossRef]
- Ghorbani, E.; Fluechter, T.; Calvet, L.; Ammouriova, M.; Panadero, J.; Juan, A.A. Optimizing Energy Consumption in Smart Cities’ Mobility: Electric Vehicles, Algorithms, and Collaborative Economy. Energies 2023, 16, 1268. [Google Scholar] [CrossRef]
- Kapassa, E.; Themistocleous, M. Blockchain Technology Applied in IoV Demand Response Management: A Systematic Literature Review. Future Internet 2022, 14, 136. [Google Scholar] [CrossRef]
- Qahtan, M.H.; Mohammed, E.A.; Ali, A.J. Charging Station of Electric Vehicle Based on IoT: A Review. Open Access Library Journal 2022, 9, 1–12. [Google Scholar] [CrossRef]
- Aldhanhani, T.; Abraham, A.; Hamidouche, W.; Shaaban, M. Future Trends in Smart Green IoV: Vehicle-to-Everything in the Era of Electric Vehicles. IEEE Open Journal of Vehicular Technology 2024. In Press. [CrossRef]
- Murillo, F.J.; Quintero-Yoshioka, J.S.; Varela-López, A.D.; Salazar-Cabrera, R.; Pachón de-la Cruz, A.; Madrid-Molina, J.M. Experimental Evaluation of LoRa in Transit Vehicle Tracking Service Based on Intelligent Transportation Systems and IoT. Electronics 2020, 9, 1950. [Google Scholar] [CrossRef]
- Torres, A.P.A.; Silva, C.B.D.; Tertuliano Filho, H. An Experimental Study on the Use of LoRa Technology in Vehicle Communication. IEEE Access 2021. [Google Scholar] [CrossRef]
- Neeraja, B.; Ralte, H.; Jain, K.; Surlekar, S.; Arani, D.; Mabborang, R. Real-Time Life Analysis of the Electric Vehicles using IoT – Computer-Based Smart Systems. International Journal of Engineering Research & Technology (IJERT) 2022. [CrossRef]
- Yadav, R.; Chandrawat, U.B.S. Review on Advance Electric Vehicle System for Minimization of Wiring Harness Using Internet of Vehicle. International Journal of Scientific Research in Engineering and Management (IJSREM) 2023, 7, 1–5. [Google Scholar] [CrossRef]
- Phadtare, K.S.; Wadkar, S.S.; Thorat, S.S.; Ghorpade, A.S.; Jadav, A.B. A Review on IoT based Electric Vehicle Charging and Parking System. International Journal of Engineering Research & Technology (IJERT) 2020, 9, 831–836, ISSN: 2278-0181. [Google Scholar] [CrossRef]
- Mishra, P.; Singh, G. Internet of Vehicles for Sustainable Smart Cities: Opportunities, Issues, and Challenges. Smart Cities 2025, 8, 93. [Google Scholar] [CrossRef]
- Lu, S.; Shi, W. Vehicle Computing: From Traditional Transportation to Computing on Wheels, 1 ed.; Computer Science, Springer Cham, 2024; pp. X, 242. Includes bibliographical references and index. [CrossRef]
- Peitzmeier, F.; Mockenhaupt, J.; Reith, D. Optimum Real Time Estimation and Interfacing of Braking Points for Racing Car. IEEE Transactions on Vehicular Technology 2022, 72, 1710–1719. [Google Scholar] [CrossRef]
- Garrosa, M.; Olmeda, E.; Díaz, V.; Mendoza-Petit, M.F. Design of an estimator using the artificial neural network technique to characterise the braking of a motor vehicle. Sensors 2022, 22, 1644. [Google Scholar] [CrossRef] [PubMed]
- Herrmann, T.; Wischnewski, A.; Hermansdorfer, L.; Betz, J.; Lienkamp, M. Real-time adaptive velocity optimization for autonomous electric cars at the limits of handling. IEEE Transactions on Intelligent Vehicles 2020, 6, 665–677. [Google Scholar] [CrossRef]
- Radrizzani, S.; Riva, G.; et al. Time-Optimal Real-Time Energy Management Strategies for Hybrid Battery Packs in Electric Racing Cars. In Proceedings of the Proceedings of the 2024 European Control Conference (ECC). IEEE, 2024.
- Herrmann, T.; Wischnewski, A.; Hermansdorfer, L.; Betz, J.; Lienkamp, M. Real-Time Adaptive Velocity Optimization for Autonomous Electric Cars at the Limits of Handling. In Proceedings of the IEEE Transactions on Intelligent Vehicles. IEEE, 2020, number 4 in 6, pp. 665–677.
- Križanović, V.; Grgić, K.; Spišić, J.; Žagar, D. An Advanced Energy-Efficient Environmental Monitoring in Precision Agriculture Using LoRa-Based Wireless Sensor Networks. Sensors 2023, 23, 6332. [Google Scholar] [CrossRef]
- Lin, S.; Wan, W. Intelligent Connected Vehicles: A Review of Recent Developments and Challenges. Vehicles 2023, 5, 3635. [Google Scholar] [CrossRef]
Figure 1.
3D schematic of a long-range vehicular telemetry system.

Figure 6.
Node-RED dashboard displaying real-time telemetry Data.

Figure 7.
Map for geolocation data.

Figure 8.
Node-RED interface showing the telemetry flow configuration and real-time debug output from the ESP32 via LoRa. This visualization confirms successful integration and low-latency data processing.
Figure 8.
Node-RED interface showing the telemetry flow configuration and real-time debug output from the ESP32 via LoRa. This visualization confirms successful integration and low-latency data processing.
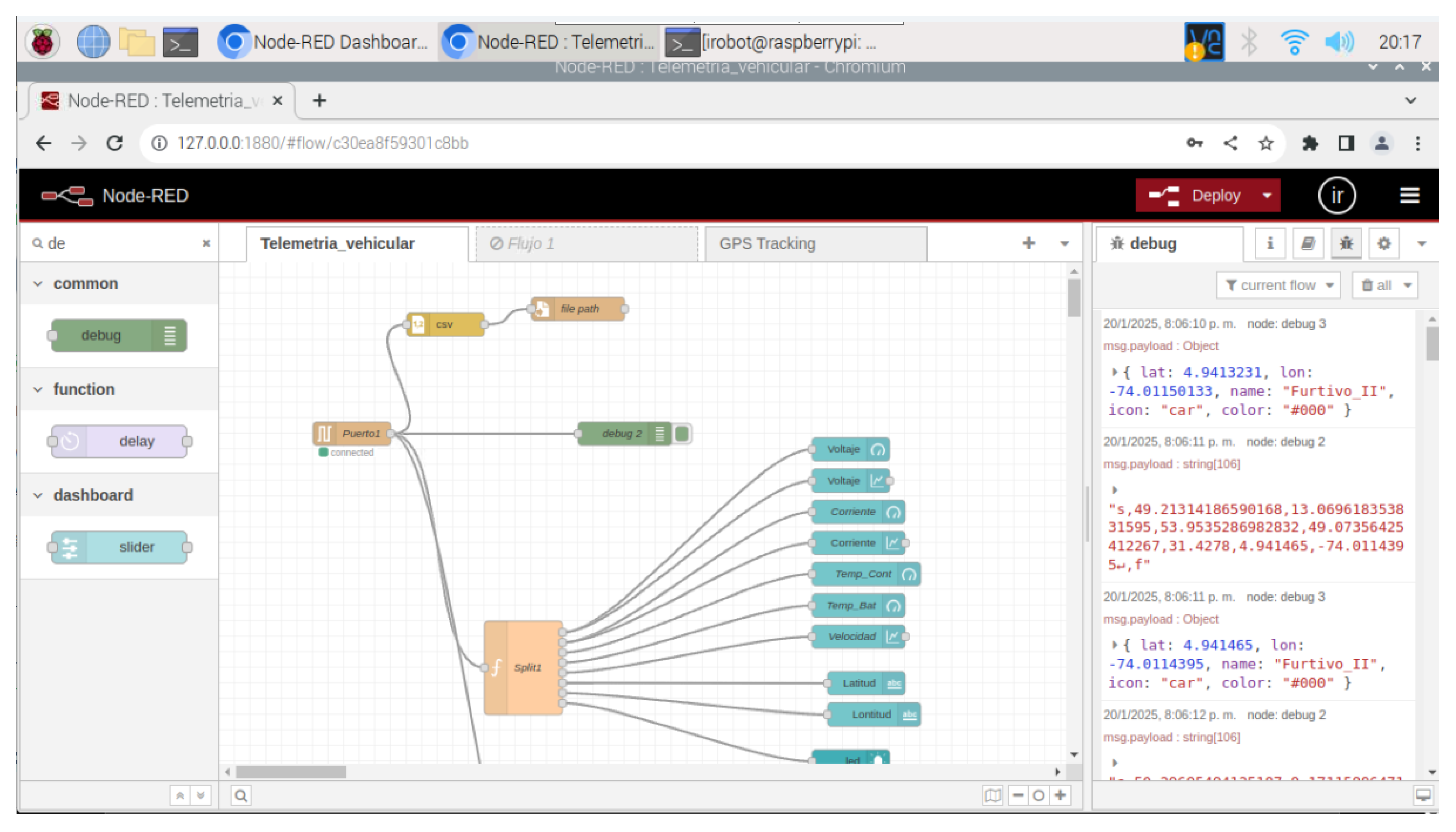
Figure 9.
Vehicle performance data across one full lap: voltage (blue), current (green), and speed (orange) over time.
Figure 9.
Vehicle performance data across one full lap: voltage (blue), current (green), and speed (orange) over time.
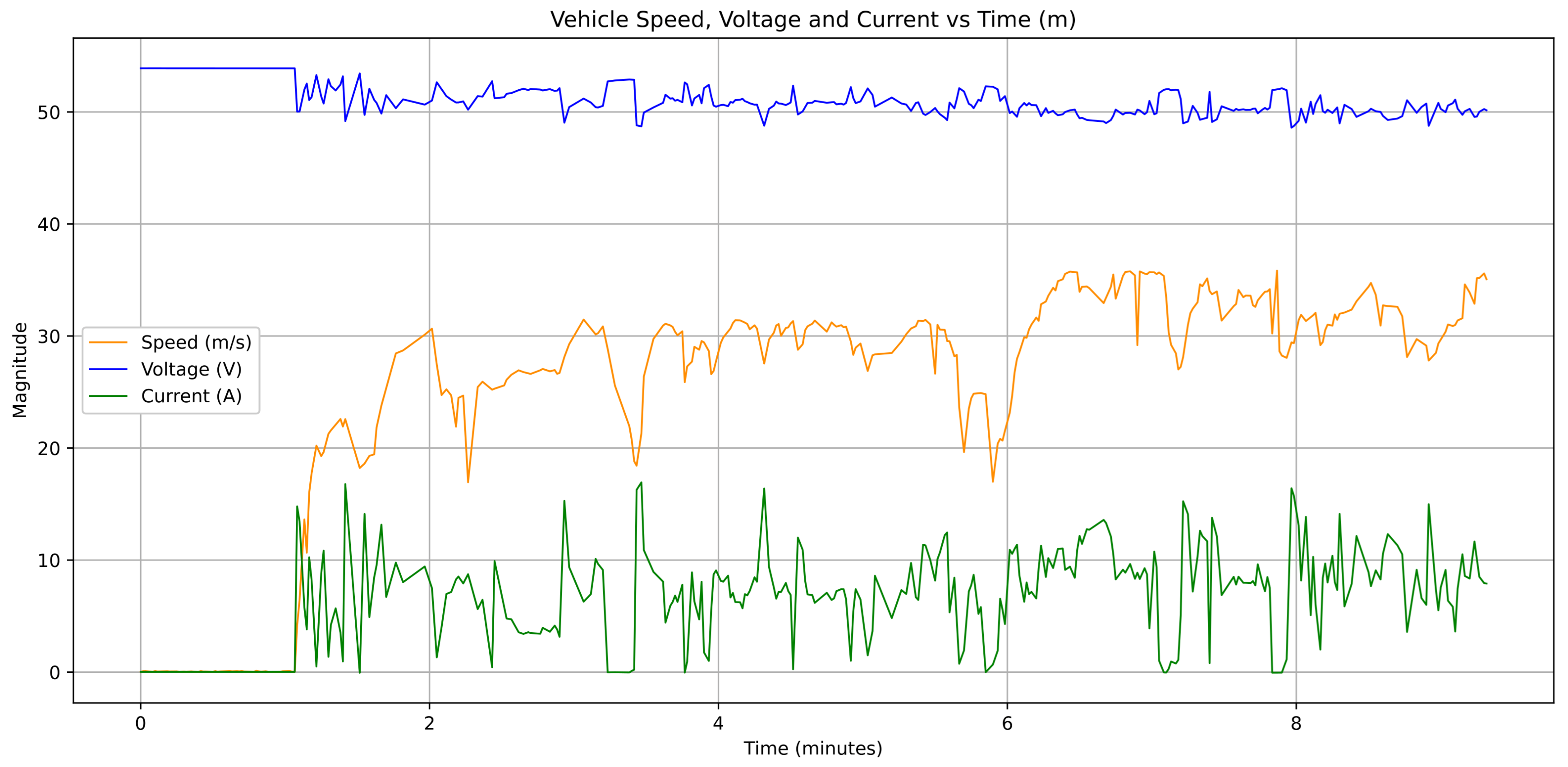
Figure 10.
Full GPS trajectory of the vehicle recorded using telemetry during one lap at the CNVTE event.
Figure 10.
Full GPS trajectory of the vehicle recorded using telemetry during one lap at the CNVTE event.
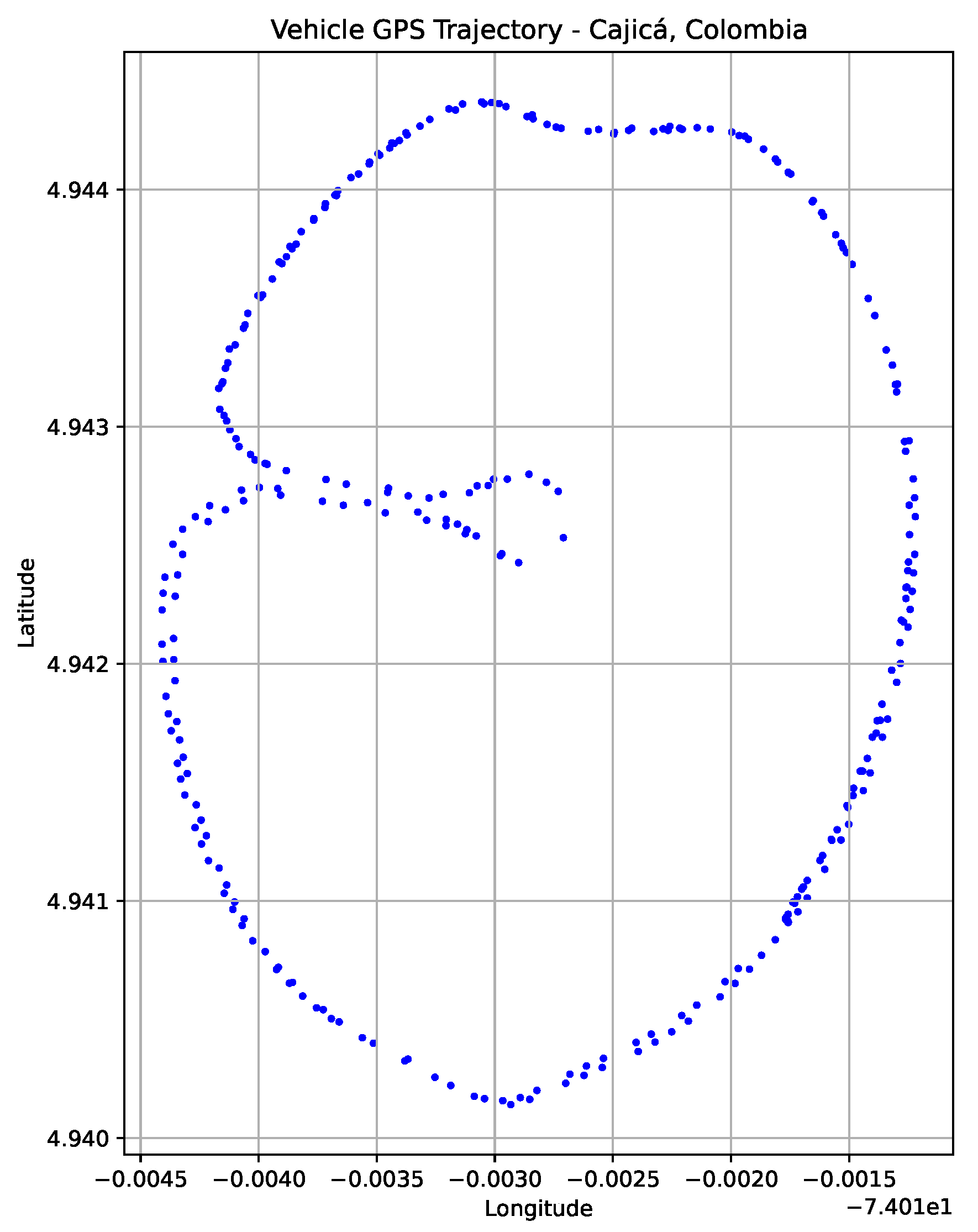
Figure 11.
Overlay of GPS trajectories: Lap 0 (red, no telemetry feedback) vs. Lap 1 (black, with telemetry-guided strategy).
Figure 11.
Overlay of GPS trajectories: Lap 0 (red, no telemetry feedback) vs. Lap 1 (black, with telemetry-guided strategy).
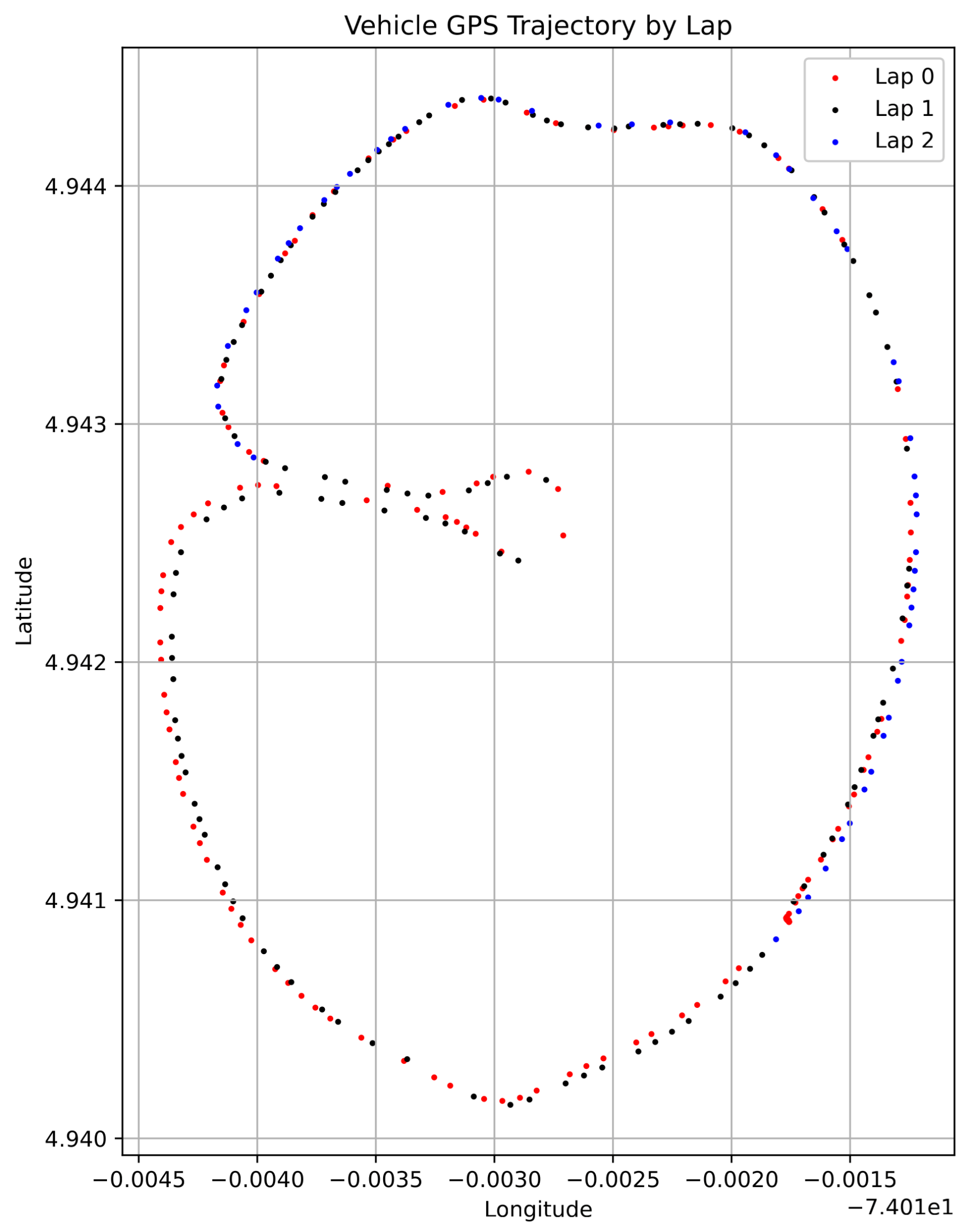
Table 1.
Sensor Accuracy and Performance Metrics.
| Sensor Type | Accuracy | Error Margin |
|---|---|---|
| Inclination, Current, Voltage | N/A | |
| Temperature (Battery and Ambient) | N/A | ±2 °C |
| GPS Module | N/A | ±3 m |
| Hall Effect Distance Sensor | deviation | N/A |
Table 2.
Performance metrics per lap using telemetry data.
| Lap | RMS Power (kW) | Time (min) | Efficiency (kWh/km) |
|---|---|---|---|
| 0 | 0.325 | 4.67 | 0.01580 |
| 1 | 0.428 | 3.08 | 0.01374 |
Table 4.
Comparative Table—Additional Related Works.
| Reference | Context/Application | Technology Used | Real-World Validation | Focus on Racing/High-Stress Environments |
|---|---|---|---|---|
| Ghorbani et al. (2023) | Smart cities, energy optimization | Heuristics, optimization | No | No |
| Kapassa & Themistocleous (2022) | Blockchain-based DR in IoV | Blockchain, IoV | No | No |
| Qahtan et al. (2022) | IoT-based EV charging | ZigBee, RFID, IoT | No | No |
| Aldhanhani et al. (2023) | Smart Green IoV & V2X | DWC, V2X, LPWAN | No | No |
| Murillo et al. (2020) | LoRa for vehicle telemetry | LoRa | Yes (experimental) | Indirect |
| Torres et al. (2021) | LoRa for urban transit | LoRa | Yes (experimental) | Indirect |
| Neeraja et al. (2022) | Battery SoC telemetry frameworks | MQTT, Node-RED, Arduino | Prototype comparison | No |
| Yadav & Chandrawat (2023) | ESP32 wireless in EVs | ESP32, IoV | Conceptual | No |
| Phadtare et al. (2020) | IoT in smart parking & EV charging | IoT, cloud, parking sensors | No | No |
| Mishra & Singh (2025) | IoV in sustainable smart cities | Multi-layer IoV model | No | No |
| Radrizzani et al. (2024) | ML for battery optimization | ML algorithms | Simulation | No |
| Herrmann et al. (2020) | ML-based telemetry prediction | Neural networks | Simulation | No |
| Waisara et al. (2023) | GPRS-based vehicle telemetry | GPRS, GPS | Limited field tests | No |
| Križanović et al. (2023) | LoRa sensor network optimization | LoRa, WSN | Yes (non-vehicular) | No |
| This Paper (2025) | Electric racing telemetry system | ESP32, LoRaWAN, Node-RED | Yes (EV competition) | Yes |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



