
Submitted:
21 July 2025
Posted:
22 July 2025
You are already at the latest version
Abstract
Genetic Programming (GP) is a method within evolutionary computation that focuses on creating computer programs by mimicking the process of natural evolution. Unlike traditional programming, where code is written in fixed-length strings, GP represents programs as tree structures, allowing for more complex and flexible solutions. This approach enables the evolution of programs that can adapt and improve over time, making it a powerful tool for solving various computational problems. The complexity of Genetic Programming (GP) arises from its use of tree structures to represent computer programs, which differs from traditional methods that use fixed-length strings. This unique representation creates specific mathematical challenges, such as how to effectively evaluate and optimize these tree structures. As a result, researchers face important questions about how to improve GP techniques and understand the underlying mathematical principles that govern its behavior and performance. The current exposition explores the mathematical challenges and complexities associated with Genetic Programming (GP), which involves evolving computer programs in the form of tree structures. It also discusses the essential concepts that underlie GP, highlights its important applications in various fields, and identifies significant unresolved issues that researchers are currently facing. By addressing these aspects, the paper aims to provide a comprehensive overview of the state of research in GP.
Keywords:
genetic programming (GP)
; fixed-length strings
; computation
; mathematical complexities
1. Introduction: Core Concepts and Their Mathematical Representation
At its core, GP is a stochastic optimization
technique inspired by biological evolution. The process begins with
an initial population of randomly generated computer programs. These programs
are composed of functions and terminals appropriate for the problem domain.
Advancements in technology have influenced the software industry (Kodytek et
al., 2024) through automation, streamlining software development and testing.
Kodytek et al. focused on an automated system for generating LabVIEW code,
testing it on programming problems. Results indicated it produced functional,
accurate code, suggesting potential benefits for both experienced and novice
developers. LabVIEW (Laboratory Virtual Instrument Engineering Workbench) uses
visual elements to simplify application design for measurement and automation.
Programs consist of "virtual instruments" (VIs), graphical blocks
connecting data flow, with a front panel (user interface) and block diagram
(logic and code)., as in Figure 1 (Kodytek
et al., 2024).
In (Kodytek et al., 2024), the authors explain that
their automated code generation method uses two main scripting methods called
the "Wirer" and the "Creator" to create and manage code.
These methods help organize the code information effectively, and the details
about how they work are provided in a specific section of the paper. Figure 2 (Kodytek et al.,
2024)illustrates the entire process of how the code is generated, starting from
defining what the user needs to creating the final code.
Following(Kodytek et al., 2024), the
"Wirer" and the "Creator" are compared to chromosomes in
human cells, where each has specific roles like genes. The Creator adds
functions to a graphical programming diagram, while the Wirer connects these
functions by managing their inputs and outputs. This analogy (Kodytek et al.,
2024)helps explain how the automated code development system organizes and
structures the programming elements, similar to how genetic information is
organized in living organisms, as depicted in Figure 3 (Kodytek et al., 2024).
Kodytek et al. (2024) described a process where
algorithms evolve by selecting the best "parent" genes and then
applying mutations to create new variations. For the Creator genes(Kodytek et
al., 2024), a random number is generated, and if it's below 25, the gene may
change, either increasing or decreasing its value slightly. Similarly (Kodytek
et al., 2024), the Wirer genes also undergo mutations, but with different
probabilities, allowing for more variability in the changes, which helps improve
the overall performance of the code generated by the algorithm(See Figure 4 (Kodytek et al., 2024)).
The first problem tested in the study was a
"string problem," which involves manipulating sequences of characters
or text. This problem had two main challenges: adjusting the size of the data
and changing the values within that data. The researchers ran the algorithm
several times to see how well it performed, and the results were illustrated in
(Figure 5 (Kodytek et al., 2024)).
The results (Kodytek et al., 2024) indicated that
the algorithm can produce consistent and effective solutions even when the
input parameters change. Based on (Kodytek et al., 2024), one important part of
testing the automated code development was checking how well the generated
programs could perform a simple addition function.
The results from these tests provided clear
insights that were not as obvious when looking at more complicated mathematical
functions. These findings are illustrated in (Figure 6 (Kodytek et al., 2024) included in the research, showing how the
simpler tasks helped clarify the program's effectiveness.
In symbolic regression, the function set may
include arithmetic operators {+, -, *, /}, while the terminal set consists of
input variables and constants. Each program's fitness is evaluated using
training data. The fittest programs are selected for the next generation via
genetic operators like crossover (swapping subtrees) and mutation (random
alterations)(Zakharov, 2023).
Optimization problems with tree-based solutions involve creating complex models)(Zakharov, 2023), like mathematical functions or algorithms, from experimental data and a set of variables. This process often uses decision trees)(Zakharov, 2023), which help in recognizing patterns in biological sequences, such as proteins. In genetic programming, a method inspired by natural evolution)(Zakharov, 2023), a group of these tree structures is improved over time through processes like natural selection, including selection, crossover, and mutation, to find the best solution to a given problem, as in Figure 7 (Zakharov, 2023).
Figure 8 (Zakharov, 2023)reads mutation operators for trees as techniques used in genetic programming (GP) to modify tree-like structures that represent solutions or functions. Two common types of mutation are point mutation (GP-PM) (Zakharov, 2023), where a single node in the tree is changed to a different function or variable, and subtree mutation (GP-SM), where a whole subtree is replaced with another subtree. These operators help maintain diversity in the population of solutions(Zakharov, 2023), allowing for exploration of new potential solutions during the evolutionary process.
By merging the characteristics of two current solutions (parents), the Optimal Recombination Problem (ORP) (Zakharov, 2023) is a combinatorial optimization idea aimed at generating fresh solutions (offspring). Here(Zakharov, 2023), every parent possesses a set of characteristics; the objective is to create offspring that preserves characteristics from either parent while guaranteeing that this new result is at least as good as any other possible combination of traits from the parents. Many genetic algorithms—which simulate natural selection to identify best solutions to difficult challenges.
Observing Figure 9 (Zakharov, 2023), ORP on trees refers to "Optimal Recombination in Genetic Programming" applied to tree structures, which are often used to represent solutions in genetic algorithms. In this context(Zakharov, 2023), it involves encoding pairs of nodes in a tree that can be swapped or recombined to create new offspring solutions. The goal is to optimize the process of generating these new solutions by considering different crossover methods, such as one-point and uniform crossover, to produce the most effective combinations of existing solutions.
This evolutionary process (Kodytek et al., 2024; Zakharov, 2023; Garcia et al., 2020)continues for many generations to discover a solution program. Mathematically, the search space of GP includes all possible programs from the function and terminal sets. This space is vast(Kodytek et al., 2024; Zakharov, 2023; Garcia et al., 2020), discrete, and often characterized by a highly complex and rugged fitness landscape. The tree-based representation of programs, while flexible(Kodytek et al., 2024; Zakharov, 2023; Garcia et al., 2020), introduces significant challenges for theoretical analysis. The size and shape of the program trees are not fixed(Kodytek et al., 2024; Zakharov, 2023; Garcia et al., 2020), leading to a variable-length representation that complicates the application of classical theoretical tools from evolutionary computation.
Exploring (Garcia et al., 2020), genetic algorithms (GAs)—methods inspired by natural selection used to solve challenging optimization issues in mathematics and engineering—were investigated. These algorithms build a population of possible solutions (Garcia et al., 2020), assess their performance using a fitness function, then iteratively improve them through techniques like selection, crossover, and mutation. Using GAs to locate the maximum values of challenging mathematical functions, the authors (Garcia et al., 2020) created a technique implemented in Python and tested on certain functions to verify its efficacy.
Building on (Garcia et al., 2020), the writers outlined their mathematical optimization problem-solving using a genetic algorithm (GA). Beginning with a population of 300 chromosomes, which represent possible solutions (Garcia et al., 2020), they let the algorithm run for a maximum of 200 iterations. After 100 runs of the algorithm (Garcia et al., 2020), they discovered an ideal solution denoted by a particular binary code (the optimum chromosome) that matches to a numerical value and possesses a calculated performance score reflecting how well it resolves the problem, as in Figure 10 (Garcia et al., 2020).
Figure 10 (Garcia et al., 2020) shows that the function f has eight peaks (maximum values) between 0 and 1, two of which are close in value. This closeness can lead genetic algorithms (AG) to mistakenly identify the wrong peak as the highest one. The next challenge is to find the maximum of another function, g, which depends on two variables (x and y) within the range of -5 to 5, requiring the genetic algorithm to use chromosomes that represent both and as a pair.
Describing the setup for a genetic algorithm(Garcia et al., 2020), which is a method used to find optimal solutions to problems by mimicking the process of natural selection. They used a population of 300 "individuals," each represented by a chromosome of 50 bits(Garcia et al., 2020) and allowed the algorithm to run for a maximum of 1000 cycles. The best solution they found after running the algorithm 100 times is represented by a specific binary string (Equation 1), which corresponds to a point in a two-dimensional space with coordinates (2.00085124, 1.89686467) and a performance value of approximately 6.04.
(1)
Figure 11 (Garcia et al., 2020) illustrates the results of a genetic algorithm (GA) applied to a mathematical optimization problem, showing the best solutions (represented by red dots) found within a specific range. The graph displays two local maxima(Garcia et al., 2020), indicating that the GA identified not only the optimal solution but also several other close solutions, demonstrating its ability to explore the solution space effectively. The algorithm was efficient(Garcia et al., 2020), typically completing its search for the best solution in just two to three minutes over 200 cycles, and tracking the other solutions helps visualize how the algorithm improves over time.
Figure 11 (Garcia et al., 2020) illustrates a mathematical function, g, showing two local maximum points within the specified range of (-5, 5) for both axes.
2. The Mathematical Complexities of GP Dynamics
Several key mathematical complexities arise from the dynamics of the GP search process:
Schema Theory in Genetic Programming (Zojaji et al., 2022): The schema theory was one of the first theoretical frameworks for understanding evolutionary algorithms. It explains how low-order, highly fit building blocks (schemata) are transmitted and integrated to generate superior solutions. In typical genetic programming, the way programs are structured is deemed "non-local" since even minor modifications to a program can result in major changes in how it acts. This means that even a slight modification can result in an entirely different outcome, making it difficult to forecast how changes would affect overall performance. This non-locality is a challenge since it hampers the process of generating better solutions through incremental improvements.
In the example provided, a tree structure in genetic programming represents a mathematical function(Zojaji et al., 2022), specifically F1(x) = x3. When the multiplication symbol (*) at the root of this tree is changed to an addition symbol (+), the function changes to F2(x) = x2 + x, which is a very different equation despite the small change in the tree's structure. This illustrates how small modifications in genetic programming can lead to significant differences in meaning, highlighting the challenge of maintaining meaningful relationships between parts of the program during evolution, as in Figure 12 (Zojaji et al., 2022).
A semantic schema consists of two main parts: a group of important building blocks that represent meaningful components of solutions, and a function that helps describe how these building blocks are arranged within the overall solution(Zojaji et al., 2022). To extract the major schema, or significant schema, from a population in genetic programming, specific steps need to be followed. This process involves identifying patterns or structures within the population that represent common features or solutions(Zojaji et al., 2022). By analyzing these significant schemas, researchers can better understand how to improve the genetic programming process and enhance the effectiveness of finding optimal solutions, as Figure 13 (Zojaji et al., 2022) reads.
In natural evolution(Zojaji et al., 2022), species can change over time due to factors like changes in gene frequencies, shifts in their environment, or mutations in their DNA. There are two main theories about how these changes happen: Phyletic Gradualism suggests that evolution occurs slowly and steadily(Zojaji et al., 2022), while Punctuated Equilibria proposes that changes happen suddenly and in bursts, often followed by long periods of stability. Both theories help explain how species adapt and evolve in response to their surroundings(Zojaji et al., 2022).
In the context of genetic programming, the statement refers to two different ways of influencing the search for solutions: implicit bias and explicit mutation. Implicit bias means that the algorithm naturally favors certain patterns or structures (schemas) in the search space, while explicit mutation involves actively changing these patterns to explore new possibilities. The flowchart (Figure 14 (Zojaji et al., 2022)) mentioned as in below likely illustrates how these two approaches work together in the process of finding better solutions in genetic programming.
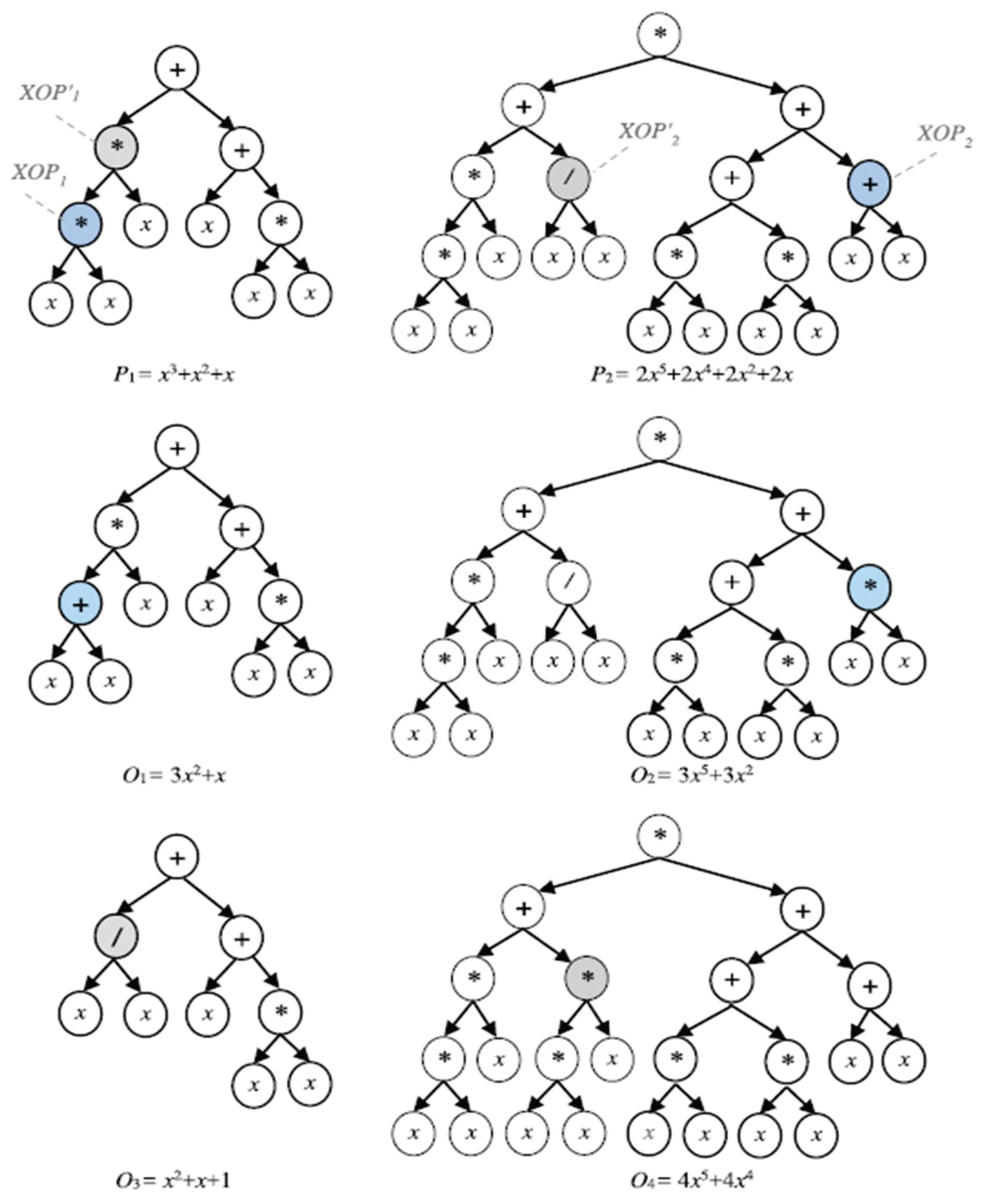
In this context, the visual example , showcased through Figure 15 (Zojaji et al., 2022) illustrates how genetic programming can produce offspring (O1 and O2) that do not match a specific pattern or schema (H) when unsuitable points are selected during the recombination process. This means that O1 and O2 are not meaningful solutions because they don't follow the structure defined by the schema(Zojaji et al., 2022) . In contrast(Zojaji et al., 2022) , when suitable points are chosen, the offspring (O4) can successfully match the schema, making it a more relevant and potentially useful solution in the search for optimal answers.
However(Gong et al., 2024; Viswambaran et al., 2020), extending schema theory to GP has proven to be a formidable challenge. The traditional definition of a schema as a string with "don't care" symbols does not translate well to the tree-based representation of GP. While various GP-specific schema theories have been proposed(Gong et al., 2024; Viswambaran et al., 2020), they are often more complex and less predictive than their counterparts for fixed-length genetic algorithms. The destructive nature of standard crossover, which can easily disrupt beneficial building blocks, further complicates the analysis(Gong et al., 2024; Viswambaran et al., 2020).
Fitness Landscapes: Fitness landscape metaphorically visualizes the search process in GP, with program fitness determining height(Huang et al, 2025). Mathematical properties like ruggedness, neutrality (plateaus), and modality (local optima) significantly impact GP search performance(Huang et al, 2025). Analyzing these properties is mathematically challenging due to the high dimensionality and discrete nature of the program space(Huang et al, 2025).
Bloat: A well-known and persistent problem in GP is the tendency for programs to grow in size over successive generations without a corresponding improvement in fitness (Rimas et al., 2023; Zhang et al., 2023). This phenomenon, known as bloat, can lead to a significant increase in computational cost and can hinder the discovery of good solutions (Rimas et al., 2023; Zhang et al., 2023). Several mathematical theories have been proposed to explain bloat, with many pointing to the protective nature of non-coding regions (introns) against the destructive effects of crossover(Rimas et al., 2023; Zhang et al., 2023). While various methods have been developed to control bloat, a complete and universally accepted mathematical theory of its causes and dynamics remains an active area of research(Rimas et al., 2023; Zhang et al., 2023).
Convergence: Proving the convergence of GP to an optimal solution is another significant mathematical challenge(Langdon, 2022; Chen et al., 2025). Unlike some optimization algorithms for which rigorous convergence proofs exist, the stochastic and complex nature of GP makes such proofs difficult to obtain(Langdon, 2022; Chen et al., 2025). While some convergence results have been established under simplified assumptions, a general and practical convergence theory for GP is still lacking(Langdon, 2022; Chen et al., 2025)
3. Applications and Associated Mathematical Challenges
Genetic programming has been successfully applied to a wide range of problems, including:
- Symbolic Regression: This is the classic application of GP(Huang et al., 2022; He et al., 2022; Virgolin et al., 2021; Dong et al., 2022; Zojaji et al., 2022), where the goal is to find a mathematical formula that fits a given dataset. The mathematical challenges here include dealing with the potential for overfitting, managing the complexity of the evolved expressions, and ensuring the interpretability of the results(Huang et al., 2022; He et al., 2022; Virgolin et al., 2021; Dong et al., 2022; Zojaji et al., 2022).
- Optimization: GP can be used to evolve programs that solve complex optimization problems(Brabazon et al., 2020). This often involves co-evolving a population of solutions and a population of test cases(Brabazon et al., 2020), a process that introduces additional layers of mathematical complexity related to co-evolutionary dynamics.
- Machine Learning: GP has been used to evolve classifiers, feature selectors, and other machine learning models (Hu, 2023). The mathematical challenges in this domain include understanding the generalization ability of the evolved models and comparing their performance to more traditional machine learning algorithms(Hu, 2023).
4. Open Questions and Future Research Directions
Many basic mathematical issues in GP are unsolved even after years of study. A major unanswered issue in the discipline is the creation of a complete model to account for and anticipate GP behaviour under different circumstances.
- Program representation—that is, trees, linear GP, Cartesian GP, etc. —strongly affects performance, even if the theoretical explanations are unknown(Françoso Dal Piccol Sotto et al., 2021).
- Scalability: Applying GP to complex situations requires new mathematical understanding(de Vries et al., 2025).
- Generalization: Ensuring evolved programs generalize well to unseen data is vital in machine learning(Chen & Xue, 2022), necessitating a deeper theoretical understanding of generalization in GP.
5. Conclusions
Genetic programming (GP) is a powerful computational paradigm with complex mathematical aspects. Despite progress in its theoretical foundations, many questions remain. Research in schema theory, fitness landscapes, bloat, and convergence ensure GP's mathematical analysis remains vital. Deepening the mathematical understanding of GP is crucial for its full potential as a problem-solving technique.
References
- Kodytek, P., Bodzas, A., & Zidek, J. (2024). Automated code development based on genetic programming in graphical programming language: A pilot study. Plos one, 19(3), e0299456. [CrossRef]
- García, J. M., Acosta, C. A., & Mesa, M. J. (2020). Genetic algorithms for mathematical optimization. In Journal of Physics: Conference Series (Vol. 1448, No. 1, p. 012020). IOP Publishing.
- Zojaji, Z., Ebadzadeh, M. M., & Nasiri, H. (2022). Semantic schema based genetic programming for symbolic regression. Applied Soft Computing, 122, 108825. [CrossRef]
- Gong, Y., Sun, Y., Peng, D., & Chen, X. (2024). Bridge the gap between fixed-length and variable-length evolutionary neural architecture search algorithms. Electronic Research Archive, 32(1). [CrossRef]
- Huang, Z., Mei, Y., Zhang, F., Zhang, M., & Banzhaf, W. (2025). Fitness landscape optimization makes stochastic symbolic search by genetic programming easier. IEEE Transactions on Evolutionary Computation. [CrossRef]
- Chen, X., Li, J., Wang, Z., Li, J., & Gao, K. (2025). A genetic programming based cooperative evolutionary algorithm for flexible job shop with crane transportation and setup times. Applied Soft Computing, 169, 112614. [CrossRef]
- Huang, Z., Mei, Y., & Zhong, J. (2022). Semantic linear genetic programming for symbolic regression. IEEE Transactions on Cybernetics, 54(2), 1321-1334. [CrossRef]
- Virgolin, M., Alderliesten, T., Witteveen, C., & Bosman, P. A. (2021). Improving model-based genetic programming for symbolic regression of small expressions. Evolutionary computation, 29(2), 211-237. [CrossRef]
- Dong, J., Zhong, J., Chen, W. N., & Zhang, J. (2022). An efficient federated genetic programming framework for symbolic regression. IEEE Transactions on Emerging Topics in Computational Intelligence, 7(3), 858-871. [CrossRef]
- Brabazon, A., Kampouridis, M., & O’Neill, M. (2020). Applications of genetic programming to finance and economics: past, present, future. Genetic Programming and Evolvable Machines, 21(1), 33-53. [CrossRef]
- Hu, T. (2023). Genetic programming for interpretable and explainable machine learning. In Genetic Programming Theory and Practice XIX (pp. 81-90). Singapore: Springer Nature Singapore.
- Françoso Dal Piccol Sotto, L., Kaufmann, P., Atkinson, T., Kalkreuth, R., & Porto Basgalupp, M. (2021). Graph representations in genetic programming. Genetic Programming and Evolvable Machines, 22(4), 607-636. [CrossRef]
- de Vries, S., Keemink, S. W., & van Gerven, M. A. (2025). Kozax: Flexible and Scalable Genetic Programming in JAX. arXiv preprint arXiv:2502.03047.
- Chen, Q., & Xue, B. (2022). Generalisation in genetic programming for symbolic regression: Challenges and future directions. In Women in Computational Intelligence: Key Advances and Perspectives on Emerging Topics (pp. 281-302). Cham: Springer International Publishing.
- Viswambaran, R. A., Chen, G., Xue, B., & Nekooei, M. (2020, July). Evolving deep recurrent neural networks using a new variable-length genetic algorithm. In 2020 IEEE Congress on Evolutionary Computation (CEC) (pp. 1-8). IEEE.
- Langdon, W. B. (2022, July). Genetic programming convergence. In Proceedings of the Genetic and Evolutionary Computation Conference Companion (pp. 27-28).
- He, B., Lu, Q., Yang, Q., Luo, J., & Wang, Z. (2022, July). Taylor genetic programming for symbolic regression. In Proceedings of the genetic and evolutionary computation conference (pp. 946-954).
- Zakharov, A. (2023, June). Optimal recombination problem in genetic programming for Boolean functions. In International Conference on Numerical Computations: Theory and Algorithms (pp. 226-240). Cham: Springer Nature Switzerland.
- Zhang, W., Hua, D. L., Li, S. H., Ren, Z., & Yu, Z. L. (2023, August). An improved genetic programming algorithm based on bloat control. In 2023 4th International Conference on Big Data & Artificial Intelligence & Software Engineering (ICBASE) (pp. 406-413). IEEE.
- Rimas, M., Chen, Q., & Zhang, M. (2023, November). Bloating reduction in symbolic regression through function frequency-based tree substitution in genetic programming. In Australasian Joint Conference on Artificial Intelligence (pp. 429-440). Singapore: Springer Nature Singapore.
Figure 1.
Front panel and block diagram for virtual device "add_pi".
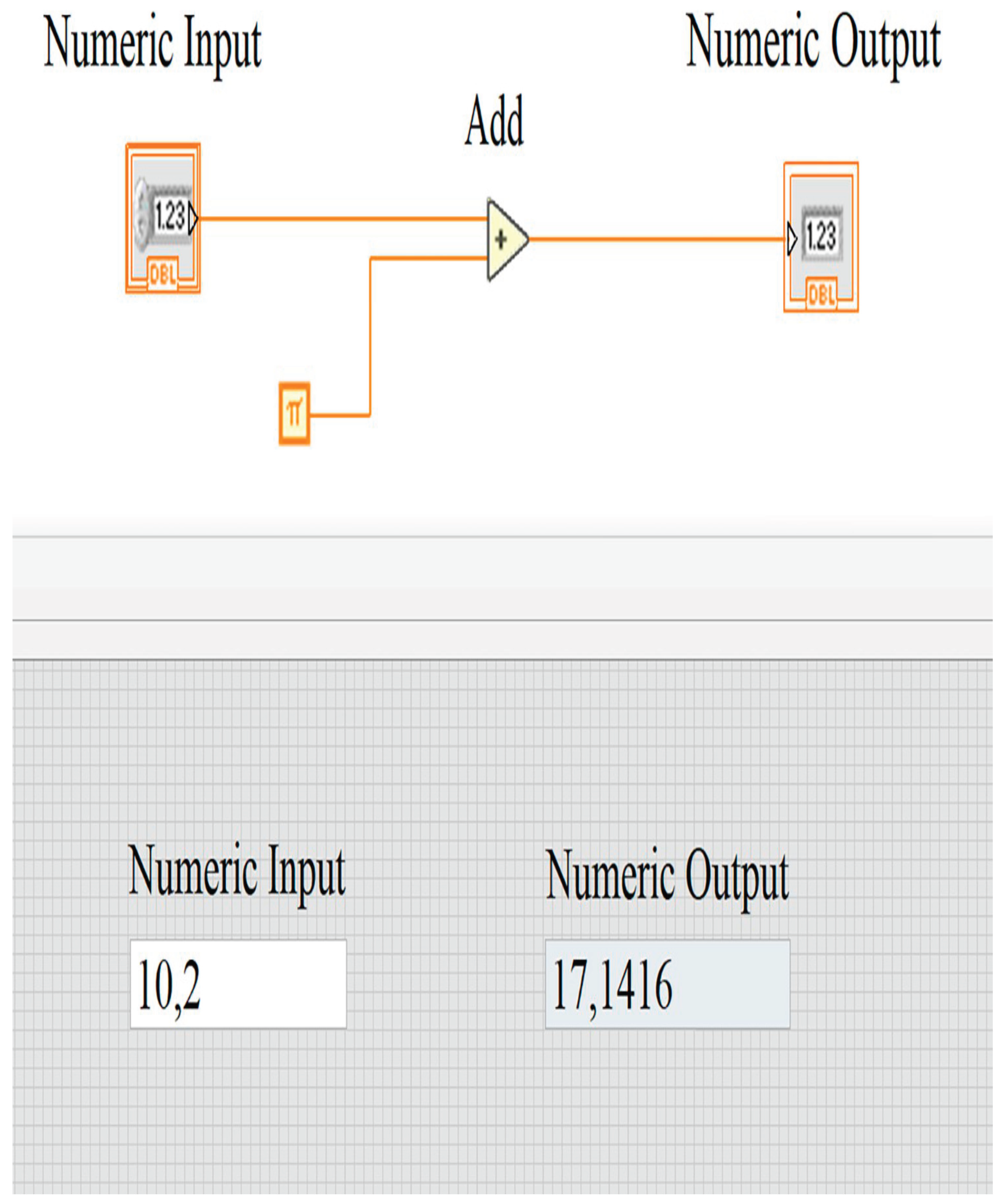
Figure 2.
Every step of the code generating framework.
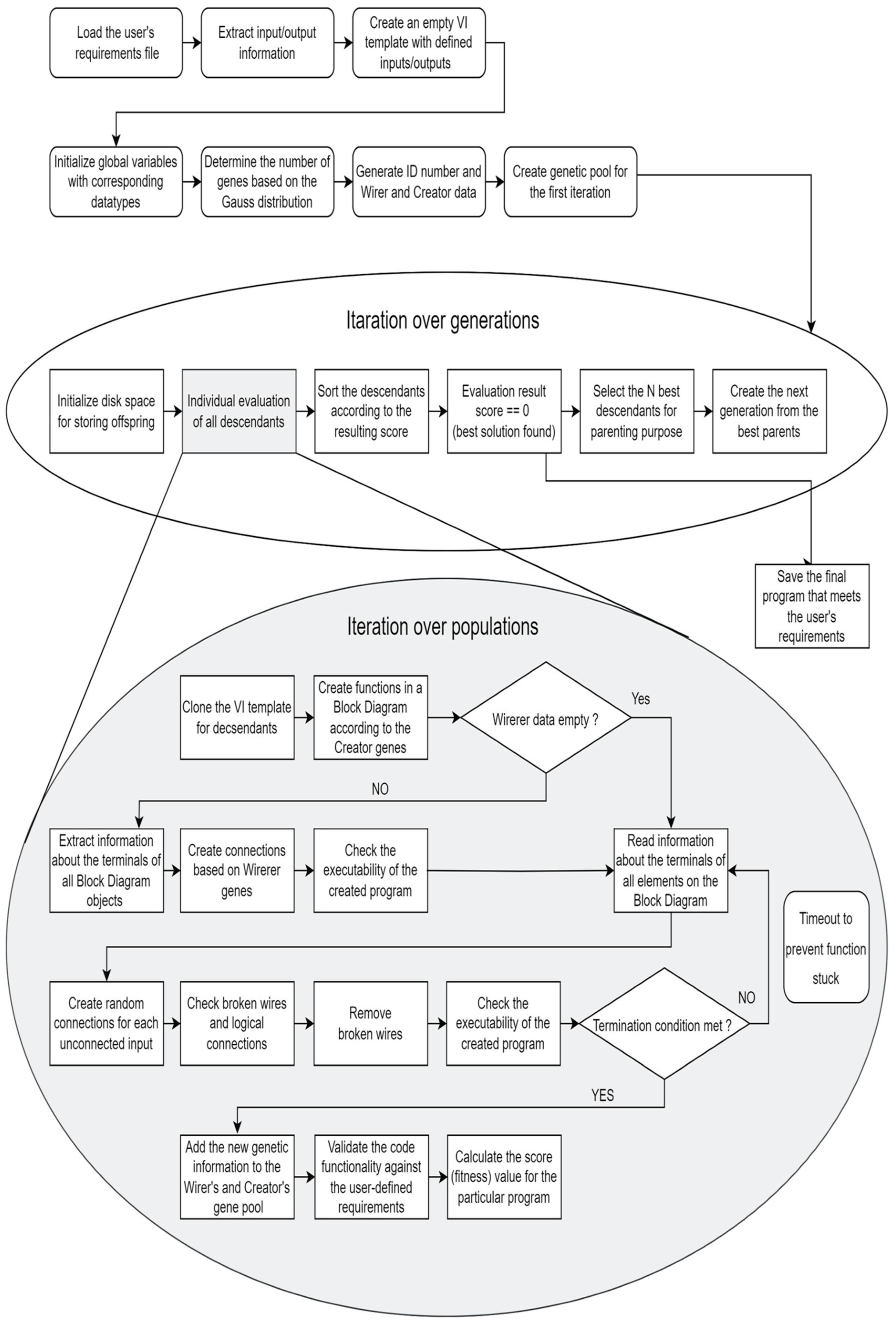
Figure 3.
The algorithms' suggested genetic structure.
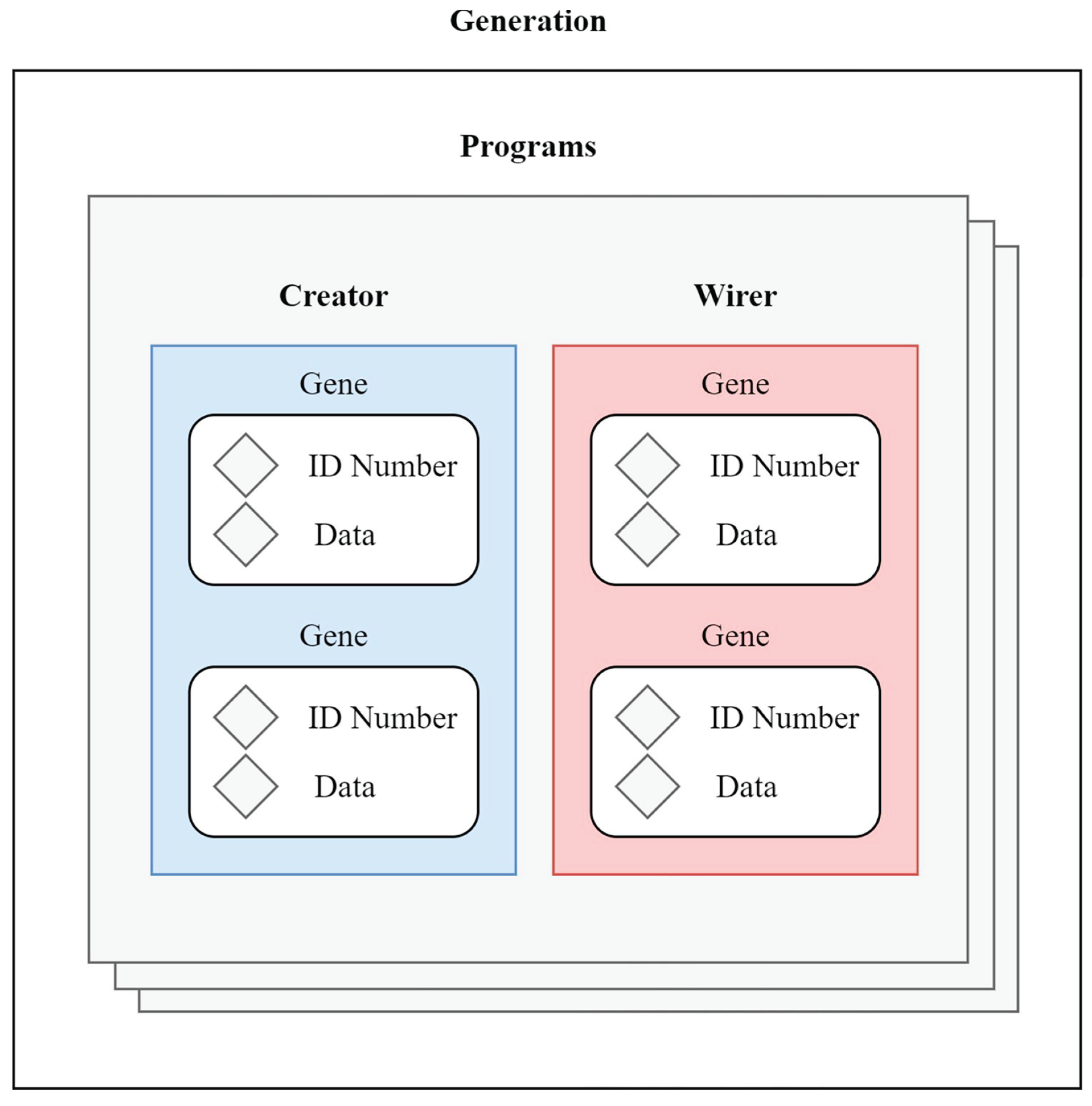
Figure 4.
The order in which processing genes evolved.
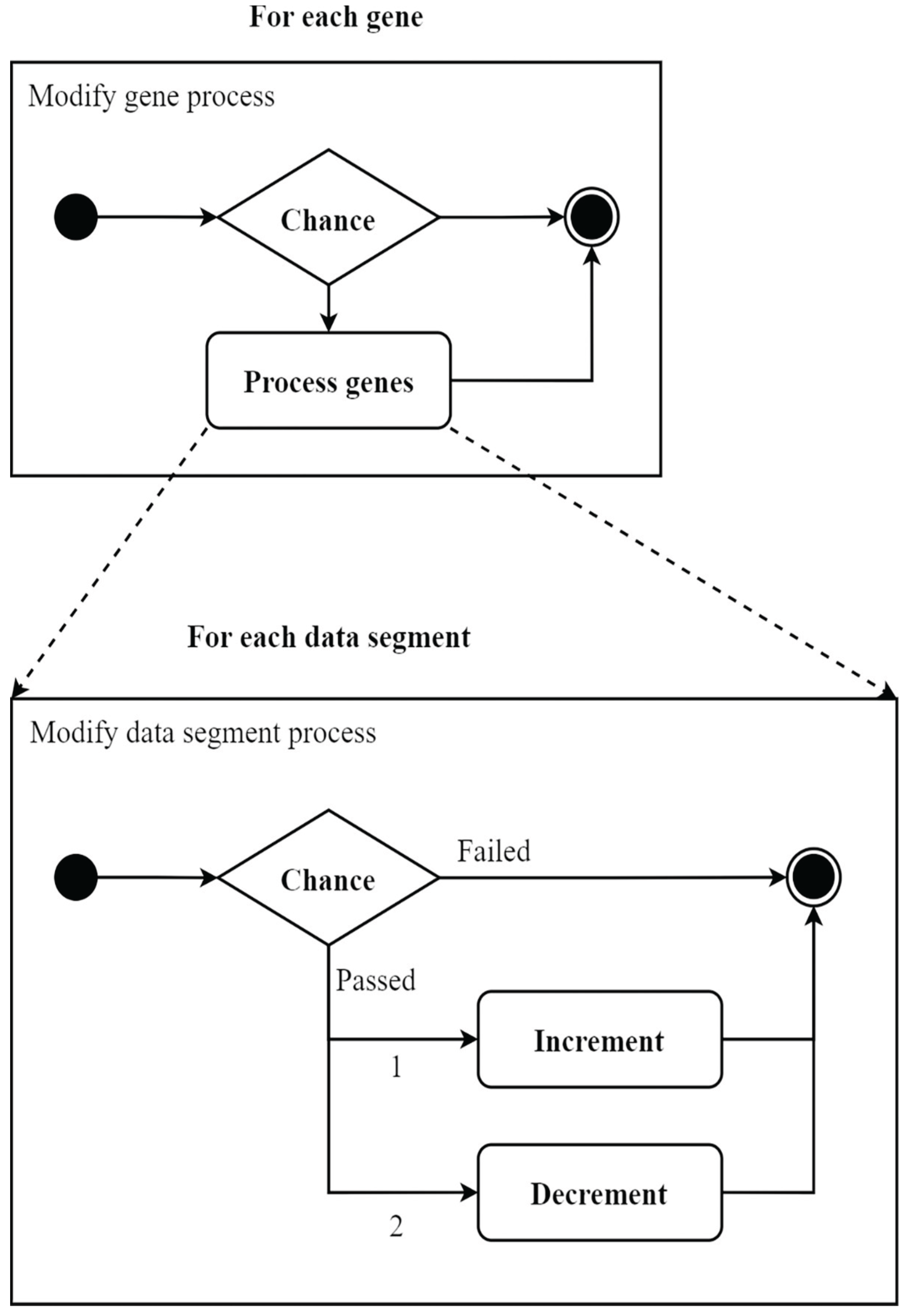
Figure 5.
The final solutions to a string problem for several algorithms runs.
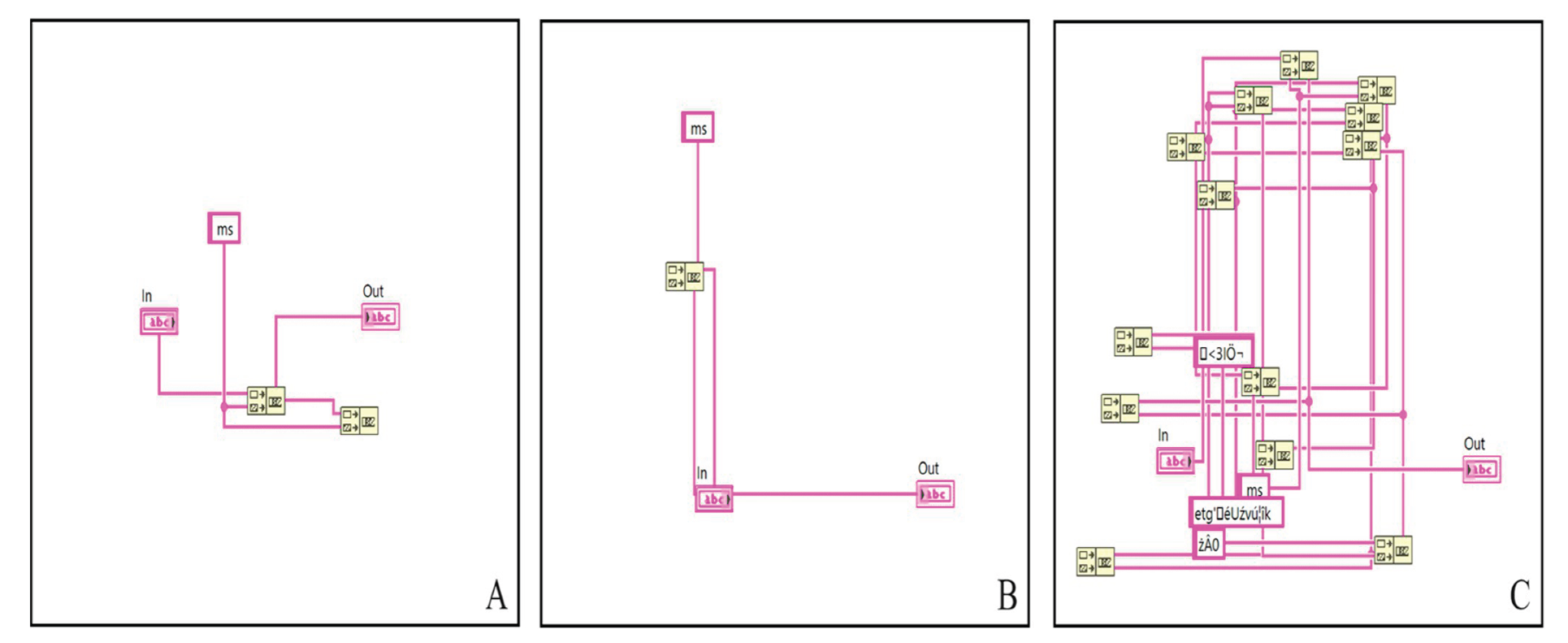
Figure 6.
Combinatorial problem solution. (A) the original code of the solution; (B) a cleaned-up solution to the task.
Figure 6.
Combinatorial problem solution. (A) the original code of the solution; (B) a cleaned-up solution to the task.
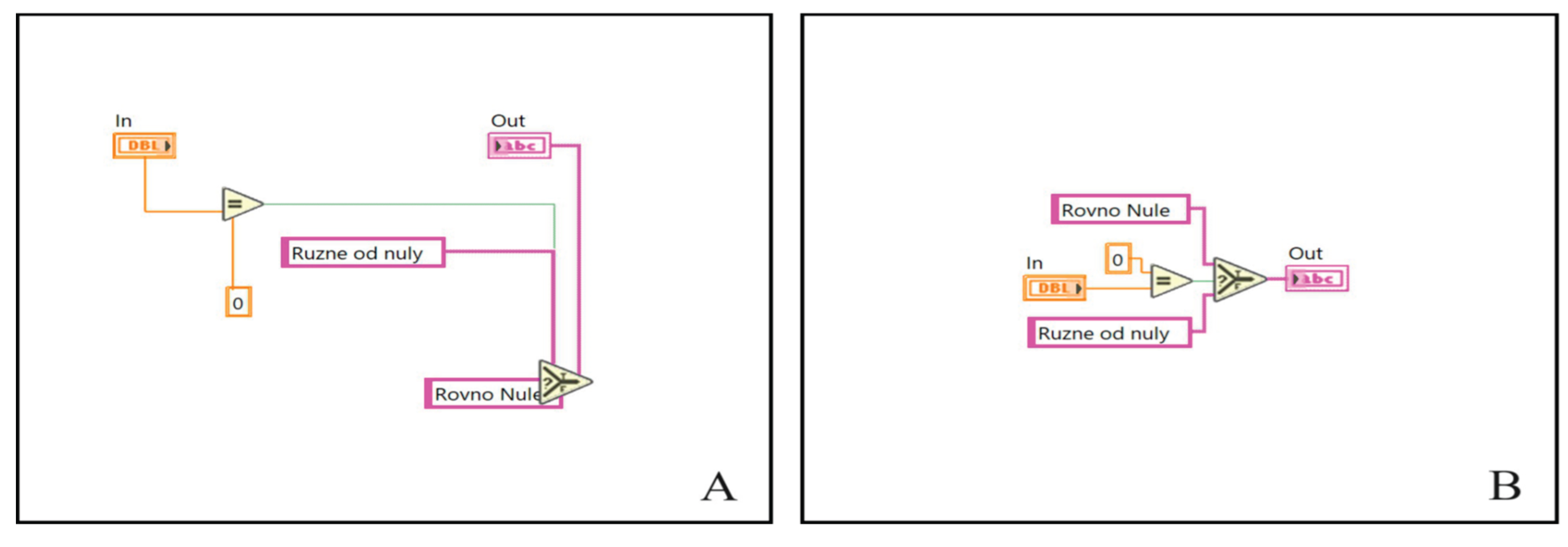
Figure 7.
An optimization problem involves finding the best solution from a set of possible solutions based on certain criteria.
Figure 7.
An optimization problem involves finding the best solution from a set of possible solutions based on certain criteria.
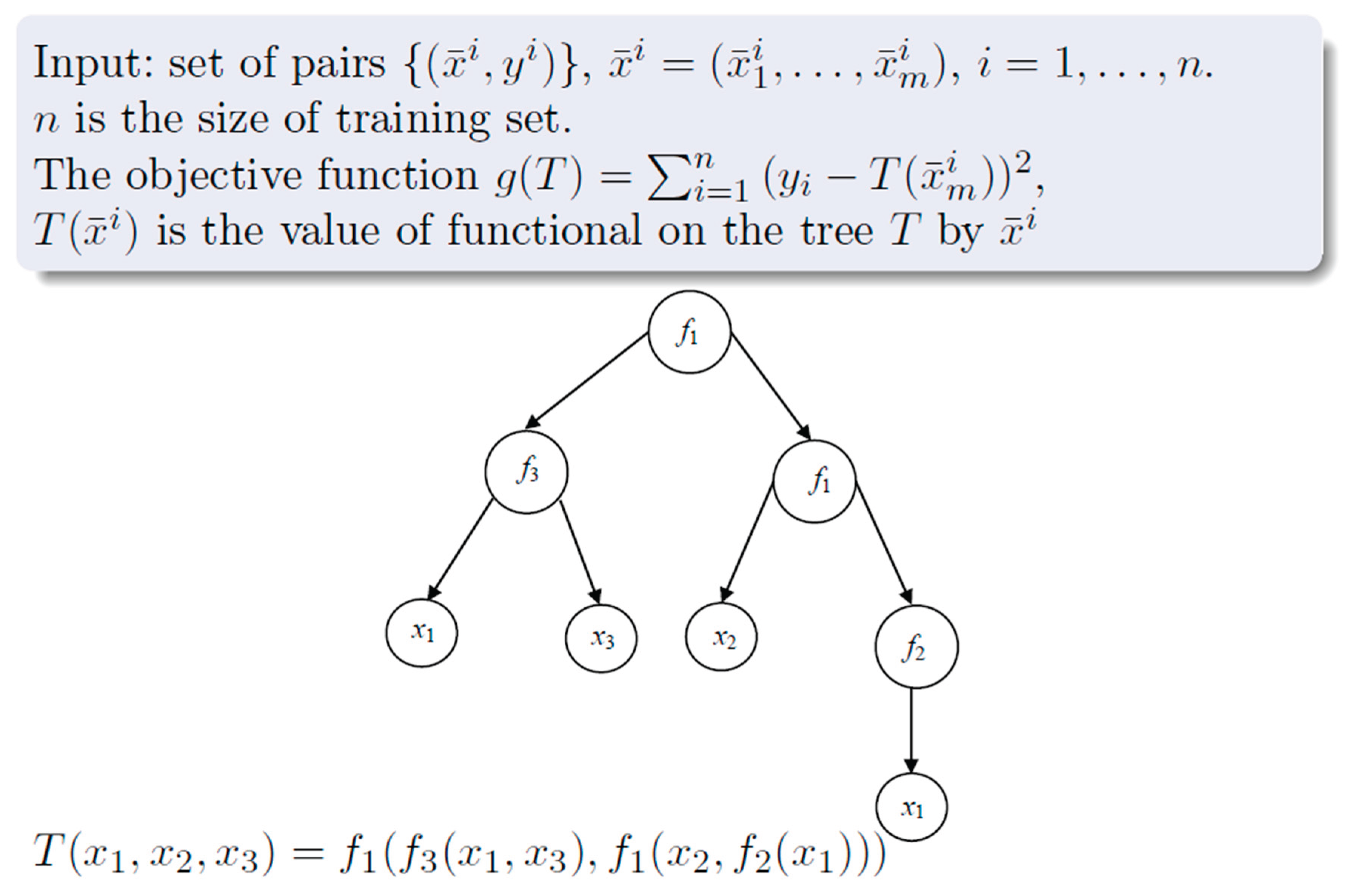
Figure 8.
Tree mutation operators.
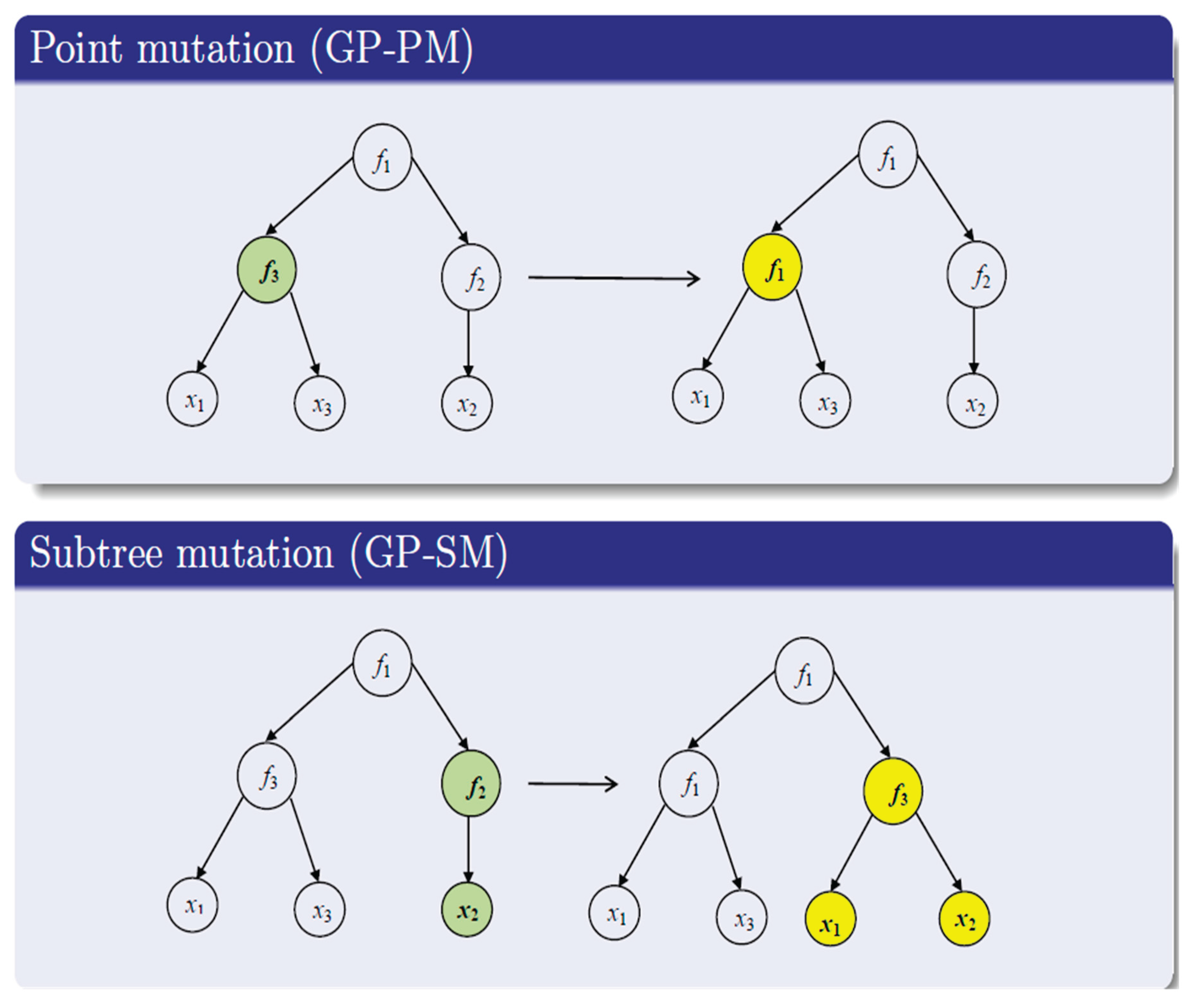
Figure 9.
Tree ORP.
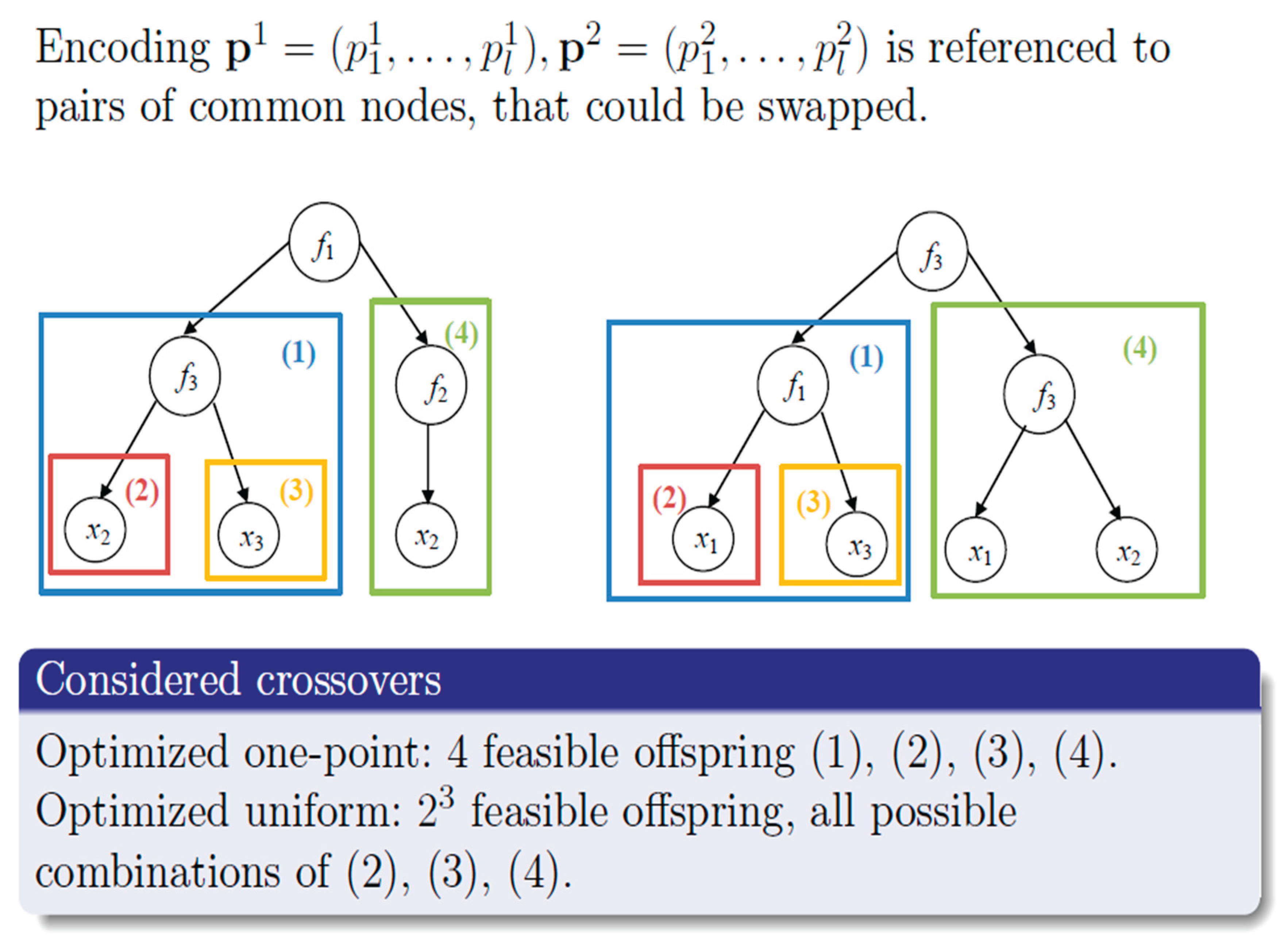
Figure 10.
Green dots indicate the optimal solutions for the function f from Equation (1) in the interval (0,1).
Figure 10.
Green dots indicate the optimal solutions for the function f from Equation (1) in the interval (0,1).
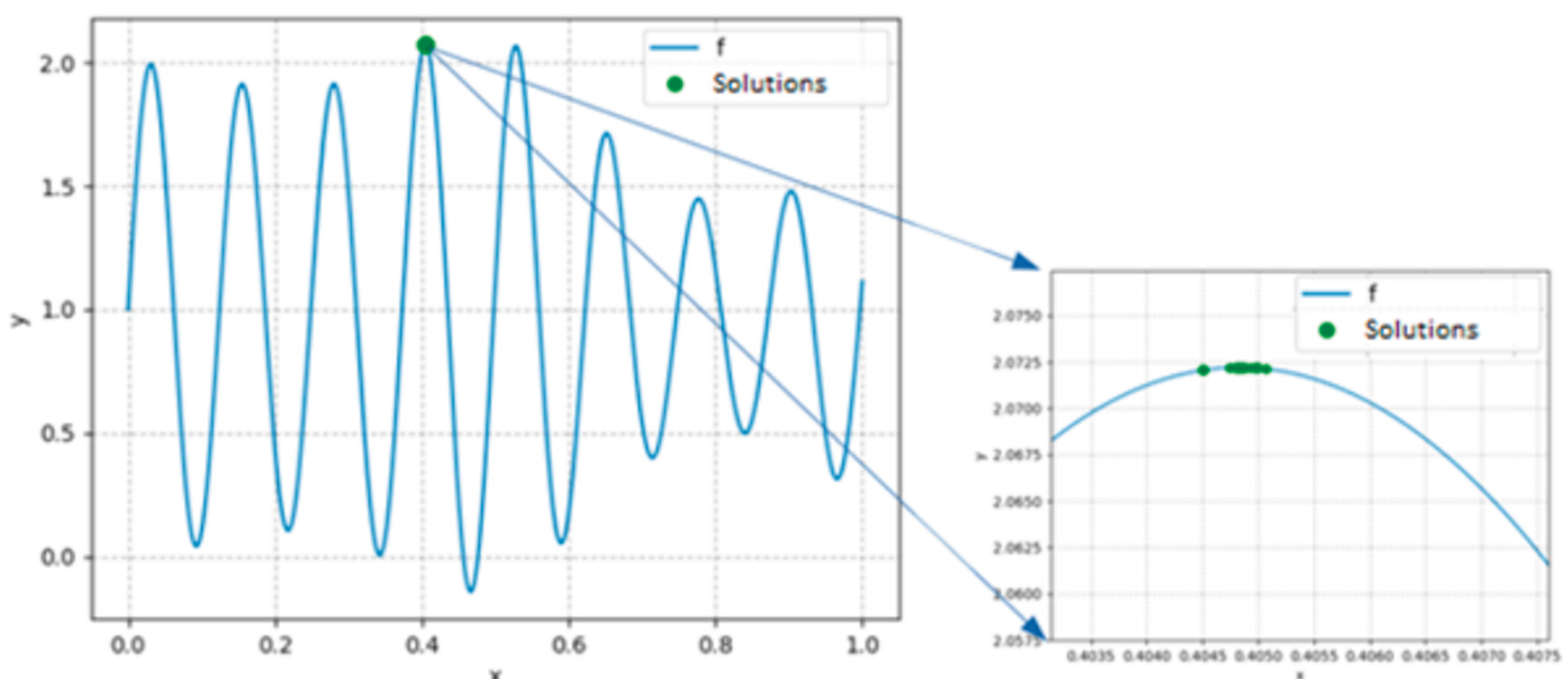
Figure 11.
In the context of genetic algorithms for mathematical optimization, the function g in Equation (1) represents a mathematical expression used to evaluate potential solutions to a problem.
Figure 11.
In the context of genetic algorithms for mathematical optimization, the function g in Equation (1) represents a mathematical expression used to evaluate potential solutions to a problem.
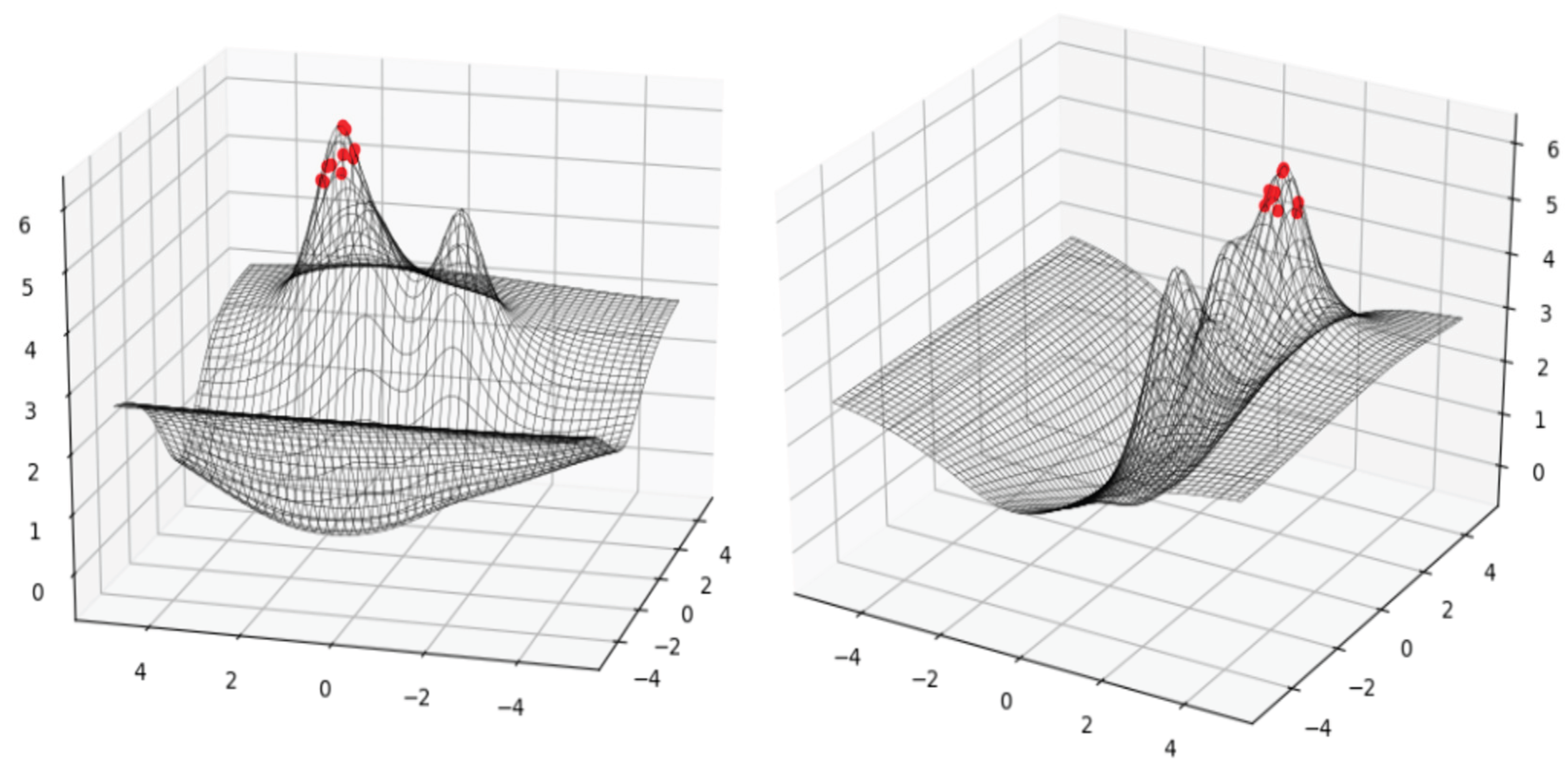
Figure 12.
An illustration of the GP representation's discontinuity of non-locality.
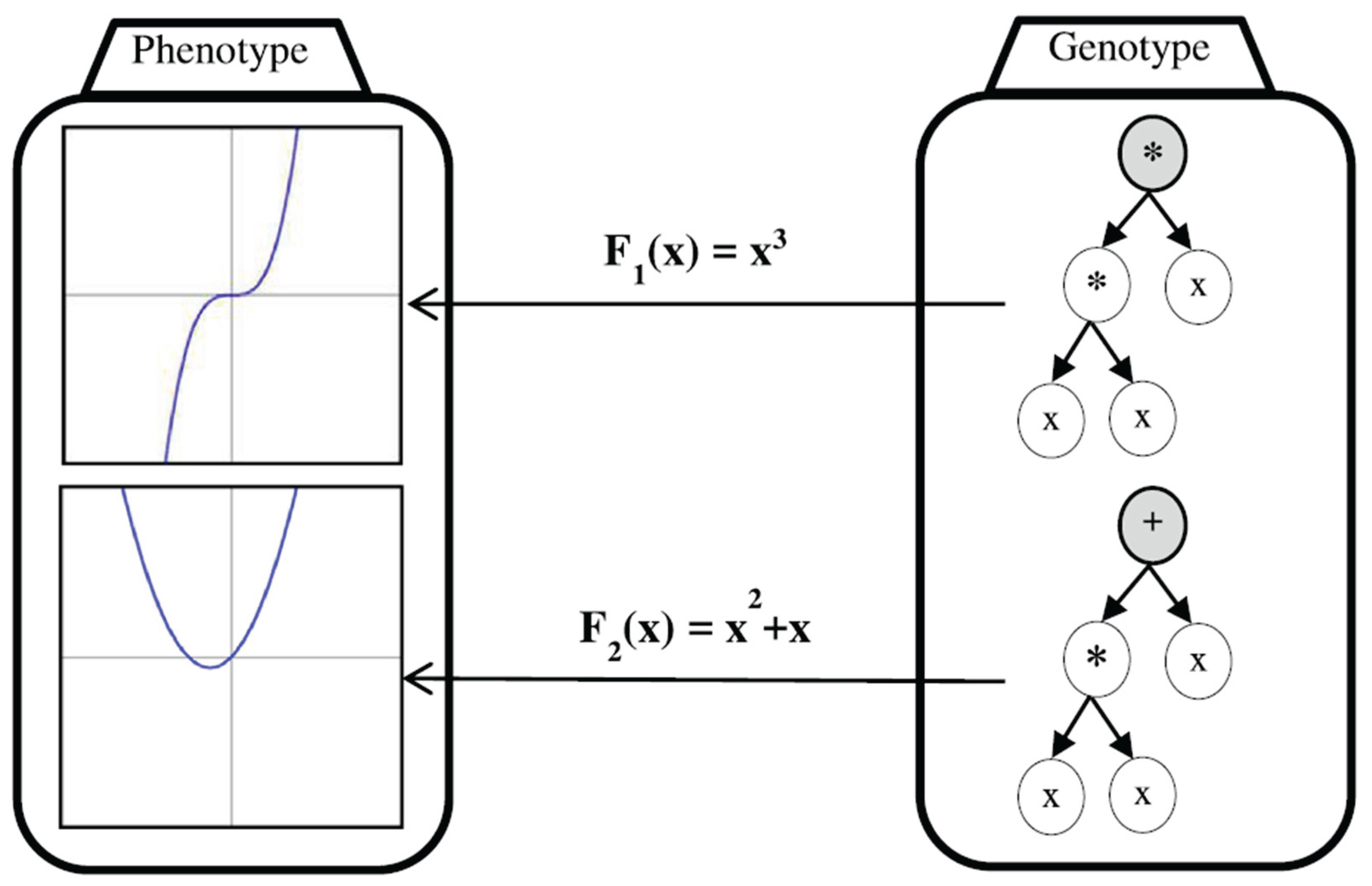
Figure 13.
Extraction of Semantic Schema.
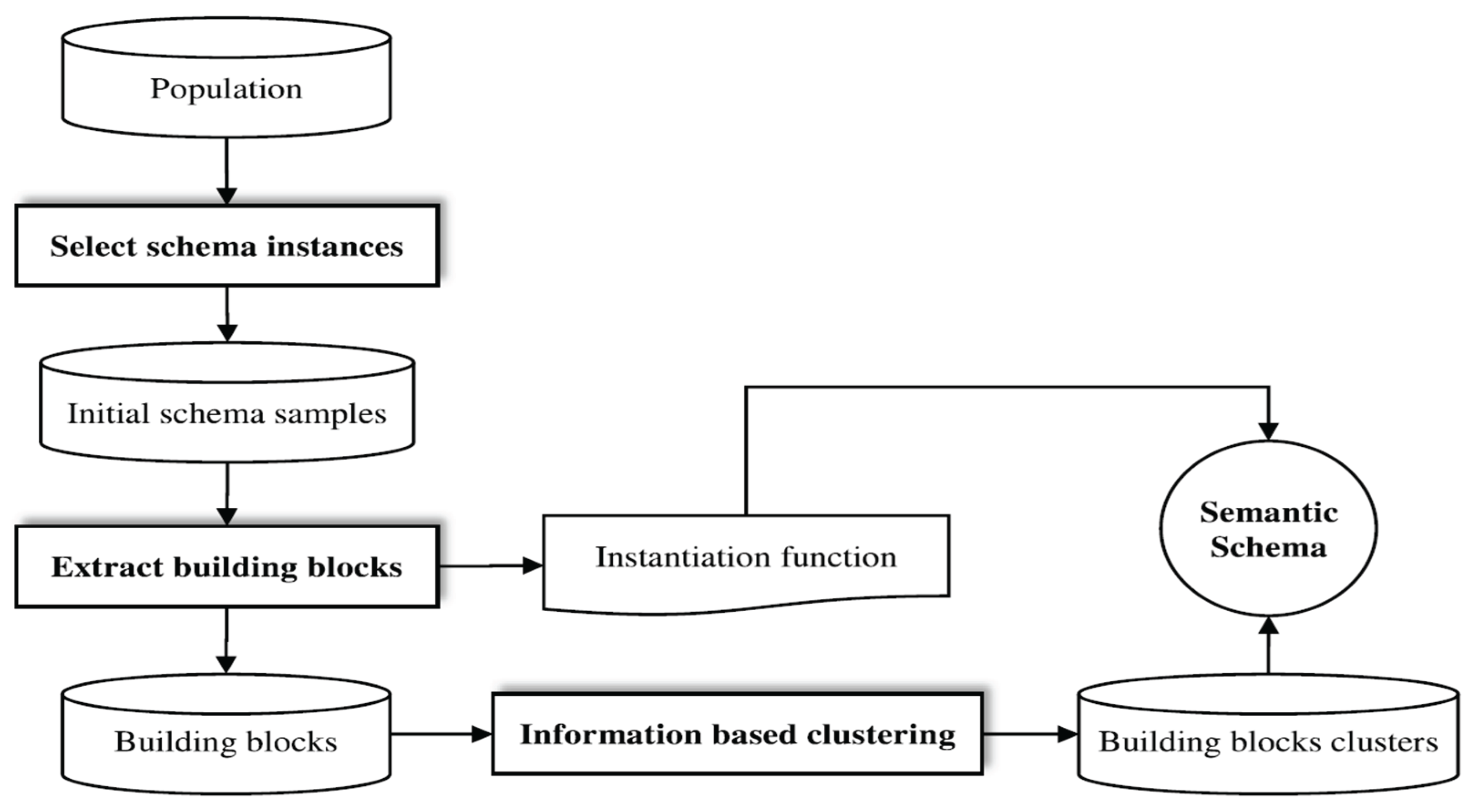
Figure 14.
SBGP Algorithm Flowchart.
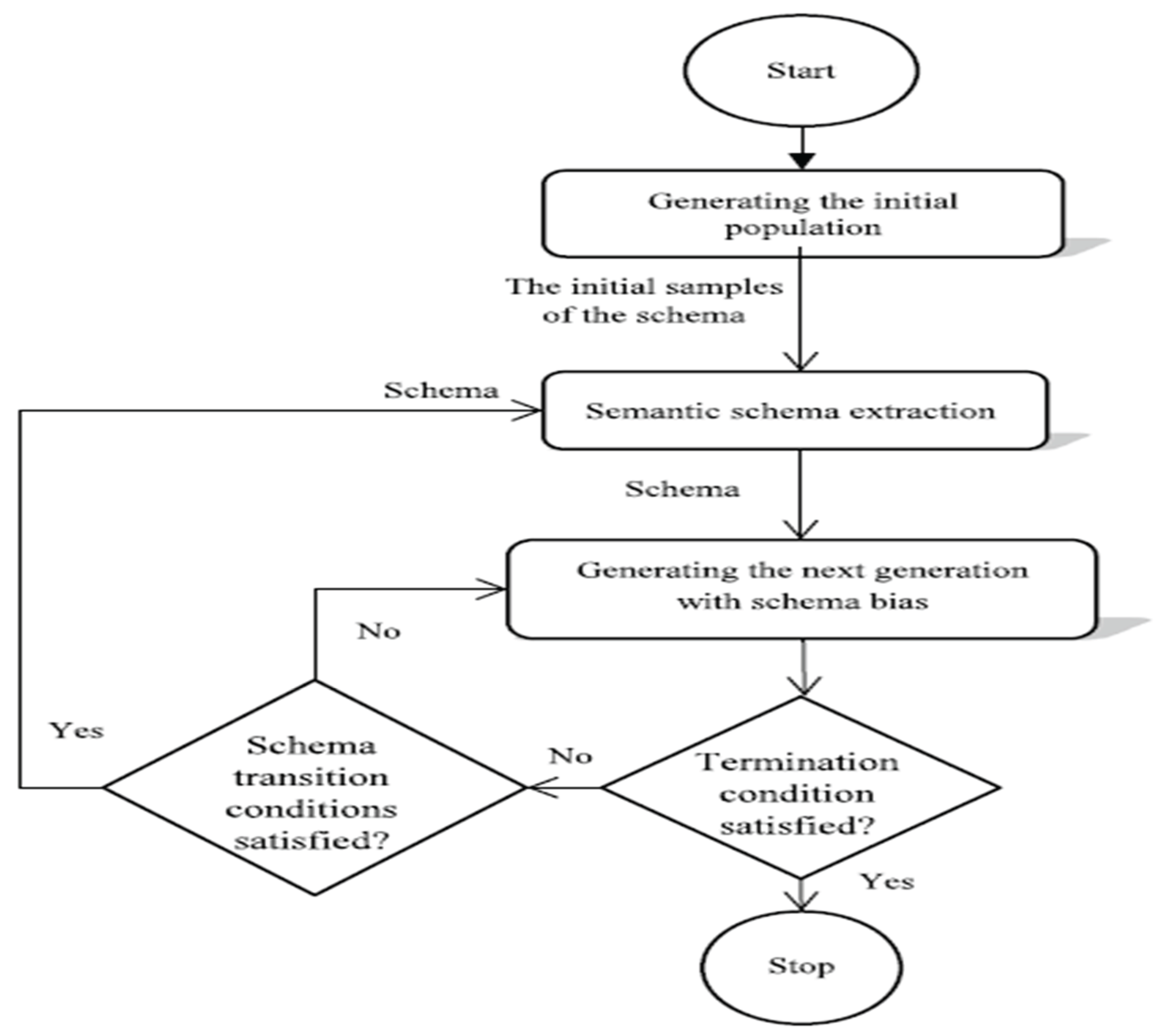
Figure 15.
Using ILRO, P1 and P2 are schema H parents, whereas O1 and O2 are non-schema instances created by selecting unsuitable points. O4 is a schema instance created by selecting acceptable points.
Figure 15.
Using ILRO, P1 and P2 are schema H parents, whereas O1 and O2 are non-schema instances created by selecting unsuitable points. O4 is a schema instance created by selecting acceptable points.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



