
Submitted:
02 June 2025
Posted:
04 June 2025
You are already at the latest version
Abstract
Search and Rescue (SAR) operations are critical for disaster management and public safety, yet traditional methods often face significant challenges in terms of time, resource allocation, and accessibility, especially in complex or hazardous environments. The integration of Unmanned Aerial Vehicles (UAVs), or drones, into SAR operations has revolutionized the field by offering rapid deployment, enhanced situational awareness, and the ability to access remote or dangerous areas. This comprehensive review explores the transformative role of UAVs in SAR, focusing on their classification, hardware and software components, and diverse applications across various environments, including forests, mountains, urban settings, and maritime operations. The review highlights the advantages of UAVs, such as their ability to conduct aerial reconnaissance, detect victims using thermal and visual sensors, and deliver emergency supplies. It also addresses the challenges associated with UAV integration, including limited battery life, regulatory constraints, and ethical considerations. Furthermore, the review discusses future directions in UAV technology, such as advancements in artificial intelligence, swarm robotics, and improved energy efficiency, which promise to further enhance the capabilities of UAVs in SAR. By synthesizing the latest research and trends, this article provides valuable insights for researchers and practitioners, emphasizing the potential of UAVs to significantly improve the efficiency, effectiveness, and safety of SAR operations in diverse and challenging scenarios.
Keywords:
Search and Rescue
; Drone Technology
; Victim Detection
; Emergency Response
; Unmanned Aerial Vehicles (UAVs)
1. Introduction
Search and Rescue (SAR) operations are critical endeavours vital for disaster management and ensuring public safety, especially when human lives are at stake. Traditionally, these operations have heavily relied on human resources and ground-based technologies, which can be time-consuming, resource-intensive, and limited by various constraints, particularly in challenging environments [1]. For instance, in densely wooded areas or during night-time operations, locating missing persons using traditional methods can be particularly difficult. Inclement weather, uneven terrain, and the sheer scale of the search area further compound these challenges, often exposing rescue personnel to high-risk situations. Moreover, poor or no cellular coverage in remote areas can hinder seamless coordination among SAR teams, impeding effective communication and prolonging mission durations [2].
However, the increasing integration of unmanned aerial vehicle (UAVs) technology, commonly known as drones, into SAR operations has revolutionised the field [3,4]. This integration offers a powerful tool to enhance the efficiency, effectiveness, and safety of rescue missions. The ability of UAVs to conduct aerial reconnaissance using advanced cameras and sensors to capture high-resolution imagery and thermal data is invaluable for locating missing persons, particularly in conditions that limit the effectiveness of ground-based searches. Research has indicated that UAVs equipped with thermal imaging cameras have been helpful in locating people who have gone missing, especially in difficult situations like woods, by identifying heat signatures even in low light, leading to remarkable efficiency in reducing response times and improving overall mission success rates [5].
The recent surge in the usage of unmanned, autonomous, and semi-autonomous vehicles in SAR is attributed to their increasing affordability, enhanced utility, and simplified operation, driven by technical advancements [6,7,8]. Figure 1 illustrates the history of drone-based SAR Systems. Specifically, UAVs have become more prevalent, adding a new dimension to SAR operations. In forest SAR operations, where historical reliance on ground-based teams has been hampered by slow progress, navigational difficulties, and exposure to environmental hazards, UAVs offer a game- changing alternative [9]. Their advantages in such scenarios include simplicity of deployment, minimal maintenance requirements, rapid mobility, and the ability to hover, making them beneficial in risky, restricted, or time-critical situations where human deployment may be challenging [4,10]. More broadly, the deployment of drones in SAR operations facilitates quick dispatch in disaster zones where time is crucial. Their low maintenance cost compared to manned aircraft and vehicles makes them an affordable and practical option. Furthermore, the high mobility of drones allows them to easily manoeuvre around obstacles and reach areas inaccessible to humans, while their ability to hover provides a stable platform for crucial data and imagery collection [1]. UAVs can also rapidly cover large forested areas, provide real-time imagery, and access otherwise difficult-to-reach locations. Their versatility, stemming from the broad range of sizes and configurations available (including fixed-wing, multirotor, unmanned helicopters, and hybrid types), allows them to be used in a variety of rescue situations [11,12]. Moreover, UAVs enhance the safety of ground-based search teams by conducting aerial reconnaissance to assess terrain and potential hazards, enabling more informed decision-making. The potential of UAVs to significantly reduce response times and improve overall mission success rates has been highlighted in various research [13].
This article aims to provide a comprehensive exploration of the role of UAVs in human SAR operations. It will examine the various facets of this technology, including hardware and software components, and operational considerations, while highlighting the manifold benefits they bring to SAR missions. The scope of this review encompasses the applications of UAVs in diverse environments, such as densely vegetated forests, rugged mountainous terrain, complex urban settings, and challenging marine and offshore operations. Furthermore, it will delve into the challenges associated with UAV integration in SAR operations such as regulatory and ethical considerations, limitations in battery life, susceptibility to weather changes, and the need for robust communication and data processing capabilities. The review will also explore potential future directions in UAV technology for SAR, including advancements in drone capabilities, integration with other technologies like artificial intelligence, improved battery life and energy efficiency, and regulatory and ethical considerations. This review synthesises the latest progress and trends in the field of UAV-assisted SAR, comparing different approaches and methodologies used in various studies, assessing their strengths and weaknesses, and providing valuable insights to enhance the effectiveness and efficiency of SAR activities for both researchers and practitioners.
The subsequent sections of this article will delve into the classification and design of UAVs for SAR operations, ex- ploring different types of UAVs and their specific features relevant to rescue missions. Following this, a comprehensive review of the applications of UAVs in SAR will be presented, covering on-site monitoring and modelling, perception and localization of targets using various sensors, and diverse SAR operations such as task assignment, path planning, and collision avoidance. The article will also address crucial aspects like communication and deployment strategies for UAVs, energy efficiency considerations during operations, and the increasing integration of artificial intelligence to enhance autonomy and effectiveness. Finally, the review will conclude by addressing the limitations and challenges of current UAV technology in SAR and discuss potential avenues for future research and development in this rapidly evolving field.
2. Classification and Components of Aerial Robots for SAR
The integration of UAVs, also commonly referred to as drones, has brought a transformative dimension to SAR operations. Their versatility, rapid deployment capabilities, and ability to access hazardous or remote areas make them invaluable tools for enhancing the efficiency and safety of rescue missions. This section provides a comprehensive overview of the classification and key components of aerial robots utilized in SAR operations.
2.1. Types of UAVs Used in SAR
The diverse requirements of SAR missions across various environments have led to the adoption of different types of UAVs, each with unique characteristics and capabilities. Fundamentally, UAVs can be categorized based on their structural design and flight mechanisms, primarily into fixed-wing UAVs, rotary-wing UAVs (including multirotor and unmanned helicopters), and hybrid VTOL UAVs [14,15,16] .
Fixed-wing UAVs operate on the same aerodynamic principles as conventional airplanes, generating lift through forward motion and the pressure difference over their wings. This design typically results in higher energy efficiency and the ability to cover large areas over extended flight times, making them well-suited for wide-area surveillance and large-scale target searches. However, their need for a runway or a large open space for take-off and landing, along with their limitations in manoeuvrability and hovering capabilities, can restrict their use in complex or confined environments [17].
Rotary-wing UAVs, on the other hand, generate lift and achieve movement through the rotation of one or more propellers. This category includes unmanned helicopters with a main rotor for lift and a tail rotor for stability, known for their agility in complex environments and swift changes in pose. However, their complex mechanical structure often translates to higher maintenance costs [18]. Multirotor UAVs, particularly quadcopters (with four rotors), have gained significant popularity in SAR due to their excellent manoeuvrability, vertical take-off and landing (VTOL) capabilities, and quick responsiveness, making them ideal for rapid deployment and exploration tasks. Despite their agility, multirotor UAVs typically exhibit higher energy consumption to maintain altitude compared to fixed-wing alternatives [1,19].
Hybrid VTOL UAVs represent a fusion of fixed-wing and multirotor designs, aiming to leverage the advantages of both. By integrating multiple sets of motors and propellers with a fixed-wing structure, these UAVs can achieve vertical take-off and landing while also possessing the long-range flight capabilities of fixed-wing aircraft. This makes them particularly useful for scenarios requiring both operational flexibility and extended reach, such as serving as communication relay stations. However, the added complexity can lead to increased drag and weight, as well as more intricate control system designs [16,20].
The selection of the most appropriate UAV type for a specific SAR mission depends critically on the terrain, environmental conditions, mission objectives, and the required operational capabilities [21,22] as illustrated in Table 1. Figure 2 demonstrates the different configurations of UAVs utilized in the SAR operations.
2.2. Key Hardware Components
The effectiveness of UAVs in SAR operations is underpinned by a suite of crucial hardware components that enable them to fly, sense, communicate, and interact with the environment. These key components, as demonstrated in Figure 3 and Table 2, include the airframe and propulsion systems, sensors, navigation and positioning systems, communication systems, payload delivery systems, and power sources and management [23].
- Airframe and Propulsion Systems
The airframe provides the structural integrity and aerodynamic shape necessary for flight, varying significantly depending on the UAV type. Propulsion systems are responsible for generating the thrust and lift required for the UAV to take off, hover (in the case of rotary-wing and hybrid UAVs), and move through the air [24]. Fixed-wing UAVs typically employ propellers or jet engines for thrust, relying on their wing design for lift. Rotary-wing UAVs utilize electric motors connected to propellers to generate both lift and control. Hybrid UAVs integrate multiple propulsion units to achieve both vertical lift and forward flight. Innovations in propeller design for high-altitude operations and the use of lightweight materials and composites are continuously enhancing the performance and efficiency of these systems [25].
- Sensors
Sensors are integral to the UAV’s ability to perceive its environment and locate targets in SAR operations. A wide array of sensors can be integrated, including optical (RGB) cameras for visual reconnaissance, thermal cameras to detect heat signatures of individuals, particularly effective in low-light conditions or densely vegetated areas, and depth cameras and LiDAR for detailed environmental mapping and victim detection. Other valuable sensors include infrared sensors, sonar, and acoustic sensors. For specialized SAR tasks, sensors like avalanche beacon receivers can be employed to locate buried victims, and PIR sensors for motion and heat detection. The integration of multiple sensor modalities often enhances the robustness and effectiveness of target detection.
- Navigation and Positioning Systems
Accurate navigation and positioning systems are essential for UAVs to autonomously navigate search areas and provide precise location data. The Global Positioning System (GPS) is a fundamental component, enabling autonomous navigation and route planning. Inertial Measurement Units (IMUs) contribute to the stability and control of the UAV during flight [26,27]. For operation in GPS-denied environments or for enhanced precision, techniques such as Simultaneous Localization and Mapping (SLAM) and visual odometry are employed. Real- time kinematic (RTK) GPS can further improve positioning accuracy [28].
- Communication Systems
Reliable communication systems are crucial for maintaining control over the UAV and for transmitting vital data collected during SAR missions. UAVs utilize various communication links, including control links for remote operation, non-payload communication links for system status, and data links for transmitting sensor information such as imagery and location data in real-time [29]. In areas with poor or no cellular coverage, UAVs can act as communication relays, ensuring seamless coordination among rescue teams. Technologies like Long Term Evolution (LTE) can facilitate long-range communication. Advanced communication architectures often involve distributed systems and intelligent edge computing to enhance network performance and SAR efficiency [30,31]
- Payload Delivery Systems
Depending on the SAR mission, UAVs may be equipped with payload delivery systems to transport and deploy essential supplies, such as emergency kits, water, or communication devices, to stranded individuals. The payload capacity of the UAV is a critical consideration, influencing the type and amount of equipment that can be carried. Some specialized UAVs might even carry explosive cartridges for controlled avalanche detachment in mountain rescue scenarios [4,32].
- Power Sources and Management
The power source is a critical factor limiting the endurance and operational range of UAVs. The majority of small to medium-sized UAVs used in SAR are powered by batteries, primarily lithium polymer and lithium-ion batteries due to their high energy-to-weight ratio. Research is ongoing into extending flight times through solar power integration and the development of more energy-efficient components and intelligent energy management systems. The concept of energy harvesting from the environment is also being explored as a potential future solution [33].
2.3. Key Software Components
The hardware capabilities of SAR UAVs are complemented by sophisticated software components that enable autonomous operation, data processing, and effective mission execution. These include mission planning software, navigation and control systems, data processing and analysis tools, and AI and machine learning algorithms as shown in Table 3 [4].
- Mission Planning Software
Mission planning software allows operators to define search areas, waypoints, flight paths, and other mission parameters before or even during a SAR operation. This software often incorporates mapping tools and allows for the integration of geospatial information. Autonomous path planning algorithms enable UAVs to dynamically adjust their routes based on real-time information and environmental conditions. Optimizing flight paths and operational parameters is crucial for maximizing search efficiency and coverage [34] .
- Navigation and Control Systems
Navigation and control systems are responsible for guiding the UAV along its planned path and maintaining stable flight. This includes autonomous navigation algorithms, flight control software, and systems for terrain following and obstacle avoidance [35,36]. Advanced control systems may incorporate robsut and adaptive control mechanisms to compensate for damage or changing conditions, as well as AI-based control for enhanced responsiveness and stability [37]. Techniques like trajectory tracking ensure the UAV adheres to its intended flight path [38,39] .
- Data Processing and Analysis Tools
UAVs in SAR operations generate vast amounts of data from their onboard sensors, necessitating robust data processing and analysis tools. This includes software for real-time data analysis to support immediate decision- making, image processing techniques for locating missing persons from visual and thermal imagery, video analytics for object recognition and tracking in live feeds, and 3D modelling software based on techniques like Structure from Motion (SfM) for creating accurate representations of disaster areas. Tools for processing and analysing point cloud data from LiDAR sensors are also crucial for environmental assessment [12,22] .
- AI and Machine Learning Algorithms
Artificial Intelligence (AI) and machine learning algorithms are increasingly being integrated into UAV systems for SAR to enhance their autonomy, perception, and decision-making capabilities. Deep learning models, particularly Convolutional Neural Networks (CNNs), are widely used for real-time image recognition and target identification from aerial imagery, including the detection of humans and other objects of interest. AI algorithms also play a vital role in autonomous navigation, obstacle avoidance, task assignment for multi-UAV systems, and optimizing search strategies. Deep reinforcement learning can be used to improve energy efficiency in communication and other operational aspects. The fusion of AI with traditional control methods often leads to more adaptable and robust UAV performance in complex SAR scenarios [40] .
The effective utilization of aerial robots in SAR operations hinges on a careful consideration of their classification based on design and flight capabilities, as well as the integration of sophisticated hardware and software components. Continuous advancements in these areas promise to further enhance the potential of UAVs in saving lives and improving the safety of SAR efforts in diverse and challenging environments [1,19].

Table 3.
Key Software Components and Their Role in SAR.
| Component | Functionality | Role in SAR Operations |
|---|---|---|
| Mission Planning Soft- ware Navigation & Control Sys- tems Data Processing & Analy- sis AI & Machine Learning |
Defining mission parameters, flight paths, and search areas Guiding the UAV, maintaining stability, and avoiding obstacles Processing and interpreting data from onboard sensors Enhancing autonomy, perception, decision-making, and optimiza- tion |
Enables efficient and systematic coverage of the search area and optimizes resource allocation Ensures safe and accurate flight, allowing the UAV to follow planned routes and navigate complex environments autonomously Converts raw sensor data into actionable intelligence, such as identifying potential vic- tims and mapping disaster areas Enables advanced capabilities like au- tonomous target detection, intelligent navi- gation, and optimized task allocation |
3. Applications of Aerial Robots in SAR Operations
The integration of UAVs has significantly transformed the landscape of SAR operations, offering a powerful and versatile tool to enhance efficiency, effectiveness, and safety across a multitude of challenging scenarios as demonstrated in Figure 4. Their unique capabilities allow for the execution of tasks previously difficult or impossible for traditional human-led efforts. This section delves into the diverse applications of aerial robots in SAR operations [22].
3.1. On-Site Monitoring, Modelling, and Analysis of Disaster Areas
In the immediate aftermath of a disaster, obtaining a clear understanding of the affected area is paramount for effective response planning. UAVs excel in on-site monitoring, modelling, and analysis, providing crucial information that can save lives and guide rescue efforts. Table 4 summarizes the key applications of UAVs in on-site monitoring, modelling, and analysis.
- Aerial Reconnaissance:
UAVs equipped with advanced cameras and sensors can conduct rapid aerial reconnaissance of disaster zones. They can capture high-resolution imagery and thermal data, which is invaluable for quickly surveying large areas, identifying potential hazards, and locating missing persons, especially in environments with dense vegetation or during nighttime operations. By providing an aerial perspective, UAVs allow for a comprehensive assessment of the terrain and potential dangers, significantly enhancing the situational awareness of rescue teams and enabling more informed decision-making [41] .
- 3D Modelling and Mapping:
Traditional methods of mapping and measurement at disaster sites can be time-consuming and may lack accuracy. UAVs, however, can utilise their efficient data collection and processing capabilities to generate accurate 3D models and maps of the affected areas. Techniques like Structure from Motion (SfM), a low-cost solution, enable the creation of 3D point clouds from digital images or video streams captured by UAV cameras [42] . Software packages such as PhotoScan, Pix4D Mapper, MicMac, and MeshLab facilitate the construction of detailed 3D models from this data. These 3D models and maps are crucial for supporting rescue efforts by providing accurate spatial information for planning operations, assessing the extent of damage, and calculating volume measurements. Furthermore, these techniques can be applied to various disaster types, including earthquakes, floods, and tsunamis, aiding in understanding the impact and planning appropriate responses, such as evacuation routes [43].
- Environmental Monitoring:
Beyond structural assessments, UAVs can also play a vital role in environmental monitoring during and after disasters. The ability of UAVs to carry various sensors suggests their potential for tasks such as detecting hazardous material leaks, monitoring the spread of pollutants, or assessing the impact of disasters on natural environments. The data gathered can provide critical insights for both immediate response and long-term recovery efforts [44].
- Structural Damage Inspection:
The collapse of buildings and other structures poses significant challenges to SAR operations. UAVs can be deployed for structural damage inspection, analysing the stability of buildings and identifying potential collapse risks, thereby aiding in planning safer rescue approaches. By capturing high-resolution imagery from multiple perspectives, UAVs can help detect defects using techniques like edge detection integrated with canny masks [45]. Furthermore, the generation of 3D point clouds from UAV-captured images allows for a more detailed assessment of structural integrity and the classification of damage levels, providing valuable information for SAR planning [46]. Advanced methods, including deep learning-based approaches like Mask-R-CNN, can automatically identify and extract information about structural damage from UAV imagery, even integrating this data into Building Information Models (BIM). The development of methods to identify and classify gaps in 3D point clouds can further improve the accuracy of damage assessments [47].
3.2. Perception and Localization of Targets
A primary objective of SAR operations is the swift and accurate perception and localization of targets, particularly victims in distress. UAVs are exceptionally well-suited for this task due to their rapid deployment and aerial vantage point. Table 5 summarizes the key applications of UAVs in perception and localization of targets.
- Victim Detection using Visual and Thermal Imagery:
UAVs equipped with visual (RGB) cameras and thermal imagers have proven highly effective in victim detection. Visual cameras can capture detailed images that, when analyzed manually or automatically using computer vision algorithms (such as Convolutional Neural Networks - CNNs), can identify individuals or signs of distress [48,49]. Thermal imagers are particularly valuable as they can detect the heat signatures of living beings, even in low-light conditions, dense vegetation, or rubble. Case studies highlight the successful use of UAVs with thermal cameras in locating missing persons in challenging environments. While RGB imagery offers high resolution and detail in good visibility, its effectiveness is limited by environmental conditions. Thermal imagery, conversely, provides a crucial detection capability regardless of lighting and some obscurants but may have lower spatial resolution and can be affected by environmental factors like temperature and humidity [50].
- Integration of Multiple Sensors for Enhanced Detection:
To enhance the reliability and accuracy of target detection, UAVs can integrate multiple sensors, providing a richer and more comprehensive data set. Beyond visual and thermal cameras, this can include sensors for detecting cellphone signals (GSM uplink or SOS signals), acoustic sensors, and avalanche beacons (ARTVA). By fusing data from various sensors, the system can overcome the limitations of individual sensors and improve the probability of detection and localization. For instance, combining visual confirmation with a detected cellphone signal or a thermal signature can significantly increase the confidence in identifying a victim. Techniques like Received Signal Strength Indication (RSSI) localization and deep learning models (e.g., Feed-Forward Neural Networks - FFNNs trained on cellphone signal data) are being explored to pinpoint victim locations based on their mobile devices [51] .
- Mobile Phone Detection and Tracking:
The widespread use of mobile phones presents a unique opportunity for victim localization. UAVs can be equipped with technology to detect and track mobile phone signals. This can be achieved by analysing GSM uplink signals or detecting SOS signals emitted by applications [52]. Techniques like pseudo-trilateration combined with deep learning are being investigated to estimate the location of a mobile phone user. The MOBNET system, currently under development, aims to utilise combined Digital Cellular Technology and European Global Navigation Satellite System (EGNSS) for real-time localization of victims based on the widespread use of mobile phones. While not a replacement for traditional methods, mobile phone detection offers a valuable supplementary tool for maximising the probability of successful victim localization, especially in urban environments [53].
- Avalanche Beacon Detection and Path Following:
In mountain rescue operations, particularly those involving avalanches, UAVs can be equipped with avalanche beacon (ARTVA) detectors. These detectors can automatically recognise the signals emitted by buried avalanche transceivers and employ path-following algorithms to rapidly locate snow-covered individuals. This capability allows for autonomous and accurate searches in hazardous environments, significantly reducing the risk to rescue personnel from secondary avalanches [32,54]. The integrated avionics of specialised UAVs can manage sensor measurements from the beacon detector to automatically update the flight mission in real-time, guiding the drone to the precise location of the beacon signal [55,56,57] .
Table 6.
Applications of UAVs in Perception and localization of Targets.
| Application | Description | Key Technologies/Sensors | Benefits |
|---|---|---|---|
| Victim Detection (Visual/Ther- mal) | Locating missing persons us- ing image analysis of visual and thermal data. | RGB cameras, thermal im- agers, computer vision algo- rithms (CNNs) | Detection in various condi- tions (low light, vegetation), identification of heat signa- tures. |
| Integration of Multiple Sen- sors | Combining data from various sensors to improve detection reliability and accuracy. | RGB cameras, thermal imagers, cellphone signal detectors, acoustic sensors, avalanche beacon detectors | Overcoming limitations of in- dividual sensors, increased confidence in detection, lo- calization of victims through multiple data streams. |
| Mobile Phone Detection and Tracking | Identifying and locating vic- tims by detecting and track- ing their mobile phone signals. | Cellphone signal detection technology (GSM, SOS), RSSI localization, deep learning | Utilises widespread technol- ogy, potential for localization in urban areas. |
| Avalanche Beacon Detection | Rapidly locating individuals buried in snow by detecting signals from their avalanche transceivers. | Avalanche beacon (ARTVA) detectors | Autonomous and accurate searches in hazardous avalanche terrain, reduced risk to rescuers. |
3.3. SAR Operations and Task Execution
Beyond detection and localization, UAVs are actively involved in various aspects of SAR operations and task execution, enhancing the overall efficiency and safety of rescue missions. Tbale 6 summarizes the key applications of UAVs in SAR operations and task execution.
- Task Assignment and Coordination of Multiple UAVs:
In large-scale disasters, the effective deployment of multiple UAVs is crucial. Task assignment and coordination among these aerial robots present a complex optimization problem. Given the dynamic and often uncertain nature of disaster environments, coordinating a team of UAVs to efficiently cover search areas, allocate resources, and respond to evolving situations is a significant challenge [58,59,60,61]. Various approaches are being explored, including centralized control, distributed methods (such as opportunistic task allocation, market-based auctions, and consensus algorithms), and hybrid systems that combine the strengths of both [62]. Learning-based approaches using Markov Decision Processes (MDP) and Deep Reinforcement Learning (DRL) are also being investigated to enable more adaptive and efficient task allocation strategies. Furthermore, research considers factors like limited battery power and the benefits of heterogeneous collaborative systems involving both ground vehicles and UAVs [63] .
- Path Planning and Navigation:
Path planning and navigation are fundamental to the autonomous operation of UAVs in SAR missions. This involves determining the optimal flight paths to effectively search designated areas while avoiding obstacles and respecting operational constraints. This navigation is typically composed of three parts: task assignment, global path planning, and local collision avoidance [64,65] . Various exploration strategies exist, including randomness- based and model-based approaches. Model-based planning, often integrated with Simultaneous localization and Mapping (SLAM) techniques, allows UAVs to build a map of the environment as they explore, enabling more efficient and targeted path generation. Energy-efficient path planning is also a critical consideration to maximise the operational endurance of UAVs [66].
- Autonomous Exploration in Unknown Environments:
SAR operations often take place in environments that are partially unknown or have been significantly altered by a disaster. Autonomous exploration capabilities allow UAVs to systematically search these areas without prior detailed maps. By employing sophisticated algorithms and sensor data, UAVs can navigate, map, and identify potential areas of interest or locate victims in unstructured and dynamic environments [1,19] . Model-based path planning integrated with SLAM techniques is particularly relevant for autonomous exploration, enabling UAVs to simultaneously build a representation of their surroundings and plan their next movements [36] .
- Agile Movement in Tight Spaces:
In urban SAR scenarios, victims may be trapped within or beneath collapsed structures, requiring UAVs to navigate tight and confined spaces. Developing UAVs with agile movement capabilities is crucial for accessing these difficult-to-reach locations. Innovations such as multi-rotor UAVs with enhanced manoeuvrability and novel airframe designs (e.g., the Voliro) are being explored to improve agility and allow for omnidirectional flight [67,68]. Even for fixed-wing UAVs, research focuses on achieving rapid course reversals and implementing efficient control algorithms for operation in constrained environments. Furthermore, integrating advanced modelling techniques and learning-based control can enable UAVs to operate closer to their physical limits, enhancing their agility in complex scenarios [69].
- Delivery of Emergency Supplies:
UAVs can be used to deliver emergency supplies such as water, food, medical kits, and communication devices to victims who are isolated or inaccessible to ground-based teams [70,71]. The ability of UAVs to carry payloads and navigate to specific GPS coordinates makes them ideal for providing rapid assistance in critical situations. This application is particularly valuable in wilderness or remote areas and in the immediate aftermath of a disaster when infrastructure may be damaged or access restricted [72].
- Communication Relay:
Maintaining reliable communication among rescue teams is essential for effective coordination. UAVs can act as communication relays in areas where cellular or radio infrastructure has been damaged or is non-existent[73]. By flying at a higher altitude, a UAV equipped with communication equipment can extend the range of radio signals, ensuring seamless communication between ground teams, command centres, and even victims with communication devices. Research focuses on optimizing the deployment of UAVs to establish effective wireless communication networks in disaster-affected areas [72] .
- Marine and Offshore Operations:
SAR operations at sea and on offshore structures present unique challenges. UAVs are increasingly being utilised in marine and offshore operations for tasks such as searching for stranded vessels, locating drowning victims, assessing damage to offshore platforms (e.g., after fires), and providing communication links. Multi- UAV systems using artificial neural networks are being developed to predict the drift patterns of victims based on wind and sea currents, enhancing search efficiency. Ensuring stable long-range communication and addressing safety concerns are critical aspects of deploying UAVs in these environments [74] .
- Wilderness Search and Rescue:
Wilderness Search and Rescue (WSAR) in remote and often rugged terrain benefits significantly from the deployment of UAVs. UAVs can rapidly survey vast and inaccessible areas, locate missing persons, assess envi- ronmental risks (e.g., unstable terrain), deliver small emergency supplies, and even restore radio communication in areas with poor coverage.Studies have shown that UAVs can significantly reduce search times and minimise risks for both rescuers and victims in WSAR operations. However, challenges such as objects obscuring victims, adverse weather conditions, uneven terrain, and battery limitations need to be considered. Ongoing research aims to quantify the value of UAVs in real WSAR missions and identify the types of incidents that would most benefit from their deployment [22,75].
Aerial robots have become indispensable tools in modern SAR operations, offering a wide array of applications that enhance situational awareness, improve the speed and probability of victim detection, increase the safety of rescue personnel, and facilitate the execution of critical tasks in diverse and challenging environments. A general framework for the drone-based SAR system is depicted in Figure 5. Continued advancements in UAV technology, sensor integration, autonomous capabilities, and collaborative strategies promise an even greater role for aerial robots in saving lives and mitigating the devastating effects of disasters [76].
Table 7.
Applications of UAVs in SAR Operations and Task Execution.
| Application | Description | Key Technologies/Algo- rithms | Benefits |
|---|---|---|---|
| Task Assignment & Coordination | Efficient allocation of tasks and coordination among mul- tiple UAVs in a dynamic envi- ronment. | Centralised/distributed control algorithms, learning- based approaches (MDP, DRL) | Maximised resource utilisa- tion, efficient coverage of search areas, adaptive re- sponse to evolving situations. |
| Path Planning & Navigation | Determining optimal flight paths for search and other missions, including obstacle avoidance. | Path planning algorithms, SLAM techniques, GPS, inertial navigation systems | Efficient search patterns, au- tonomous navigation, obsta- cle avoidance, energy optimi- sation. |
| Autonomous Ex- ploration | Systematic searching of un- known or altered environ- ments without prior detailed maps. | SLAM techniques, advanced sensor processing, autonomous navigation algorithms | Ability to operate in unstruc- tured and dynamic environ- ments, mapping during explo- ration. |
| Agile Movement in Tight Spaces | Navigating within confined and complex environments, such as collapsed buildings. | Advanced UAV designs (e.g., omnidirectional rotors), sophisticated control algorithms, compact sensors | Access to difficult-to- reach locations, enhanced situational awareness within complex structures. |
| Delivery of Emer- gency Supplies | Transporting essential items (water, food, medical kits) to isolated or inaccessible vic- tims. | Payload carrying capabilities, GPS navigation | Rapid provision of aid in crit- ical situations, access to iso- lated areas. |
| Communication Relay | Extending the range and reli- ability of communication net- works in disaster-affected ar- eas. | Communication equipment (repeaters), optimized deployment strategies | Ensured coordination among rescue teams, extended com- munication range in damaged infrastructure. |
| Marine and Off- shore Operations | Conducting SAR tasks in mar- itime environments, including searching for vessels and indi- viduals, and assessing offshore structures. | Marine-adapted UAVs, sen- sors for maritime environ- ments, communication sys- tems | Enhanced search efficiency in vast sea areas, risk assessment for offshore structures, com- munication support. |
| Wilderness Search and Rescue (WSAR) | Locating and assisting miss- ing persons in remote and challenging wilderness areas. | Rugged UAVs, thermal im- agers, communication relays | Rapid coverage of large and difficult terrain, reduced risk to rescuers, potential for faster victim location, com- munication support in remote areas. |
4. Challenges and Limitations of Aerial Robots in SAR
The integration of aerial robots into SAR operations offers numerous benefits; however, several challenges and limitations must be addressed to fully realize their potential. These can be broadly categorized into technical, operational and logistical, and ethical and social considerations [77]. Figure 6 demonstrates the key challenges and limitations of using aerial robots in SAR.
4.1. Technical Challenges
Several technical hurdles impede the widespread and seamless adoption of aerial robots in SAR missions.
- Limited Battery Life and Endurance:
A significant technical limitation of current drone technology is the restricted battery capacity, which directly impacts the flight time and, consequently, the operational range and area coverage. Drones are powered by batteries with limited endurance, meaning they can only sustain a certain amount of flight time [78]. More effective payloads often lead to larger power consumption, further reducing flight time. The shortest reported flight time in the literature for wilderness SAR was 10 minutes, while the longest was 150 minutes. This limited endurance restricts the time available to search and the size of the area that can be covered. Future research may focus on efficient energy management and high-energy-density battery technology to address this limitation [22].
- Payload Capacity Restrictions:
The amount of weight a drone can carry, known as its payload capacity, is another critical technical constraint. This limitation affects the type and number of sensors, communication equipment, and delivery payloads (such as emergency kits) that can be onboarded simultaneously. Often, a compromise must be made between the payload and the flight duration. Lightweight design using advanced materials could help mitigate this issue in the future [10,68].
- Reliability and Robustness in Harsh Environments:
SAR operations often take place in challenging environmental conditions, such as strong winds, heavy rain, extreme temperatures, and mountainous terrain. These adverse conditions can significantly affect the flight performance, stability, and reliability of drones. For instance, strong winds can lead to instability, and foggy conditions can impair the quality of imagery captured [12,79]. UAVs used in mountain rescue operations must be designed to meet environmental requirements such as low temperatures, high altitude, and strong winds. Ensuring the robustness of drone hardware and software in such demanding conditions is crucial [32,80].
- Communication Reliability and Bandwidth:
Maintaining reliable communication links between the drone, the ground control station, and other SAR team members is essential for effective operation [73].This includes control and non-payload communication links as well as data links. However, in remote or disaster-stricken areas, cellular coverage might be poor or non-existent, hindering seamless coordination. Furthermore, the bandwidth available for transmitting real-time video feeds and other sensor data can be limited, affecting the quality and timeliness of information available to the rescue teams [81,82]. UAVs can serve as communication relays in areas with poor connectivity. Future developments need to enhance UAV ad hoc networks and communication efficiency, including addressing the Doppler effect compensation between relay nodes [31,83].
- Autonomous Navigation and Obstacle Avoidance in Dynamic Environments:
While autonomy is a key advantage, enabling drones to navigate complex, dynamic, and often unknown environments and effectively avoid obstacles remains a significant technical challenge. This is particularly true in environments with dense vegetation, rugged terrain, and collapsed structures. Current path planning algorithms may not always consider the kinematic and dynamic limitations of the UAVs or may require prior knowledge of the environment map, limiting their applicability. Simultaneous Localization and Mapping (SLAM) technologies are being developed to address this, enabling real-time environmental perception and mapping. Integrating machine learning with SLAM shows promising prospects for further development in enhancing exploration performance [84] .
- Data Processing and Real-Time Analysis Capabilities:
Drones can collect vast amounts of data through various sensors. However, efficiently processing this data in real-time to extract meaningful information, such as the location and condition of victims, poses a considerable challenge due to the limited computational power onboard the UAV. Developing lightweight algorithms to reduce the computational burden and improve real-time performance is crucial. Integrating AI and machine learning for tasks like target identification and classification onboard the drone can help overcome this limitation by enabling autonomous decision-making [85] .
4.2. Operational and Logistical Challenges
Beyond the technical aspects, several operational and logistical challenges can hinder the effective integration of aerial robots into SAR workflows.
- Regulatory Frameworks and Airspace Management:
The lack of a complete and harmonised regulatory framework for UAV operations, including airspace manage- ment, flight permissions, and operational guidelines, poses a significant challenge. Restrictions on flight altitude, operating conditions, and flying beyond the visual line of sight (BVLOS) can limit the range and coverage area of drone-based SAR missions. Compliance with these regulations is essential for safe and legal operations but can be restrictive in emergency scenarios. Future research needs to address regulatory considerations for responsible and compliant drone usage in SAR [71] .
- Pilot Training and Expertise:
Operating UAVs effectively and safely in the complex and high-stakes environment of SAR requires highly trained and skilled pilots and operators. Expertise is needed in mission planning, flight control, sensor operation, data interpretation, and emergency procedures. As the use of drones becomes more widespread, ensuring an adequate number of trained personnel is crucial. Collaboration between government agencies, researchers, and the drone sector will be critical in realising the full potential of these unmanned aircraft [22,86].
- Coordination with Traditional SAR Teams and Procedures:
Integrating aerial robots seamlessly into existing SAR teams and well-established operational procedures can be challenging. Effective communication, clear role definitions, and well-defined protocols for collaboration between drone operators and ground-based search teams are essential to avoid confusion and maximise efficiency. Understanding how UAVs can best augment traditional methods and enhance overall mission effectiveness requires careful planning and coordination [87].
- Transportation and Deployment of UAV Systems:
The logistics of transporting and deploying drone systems, along with the necessary support equipment (ground control stations, charging infrastructure, maintenance tools), to often remote and difficult-to-access disaster zones can be complex and time-consuming. Rapid deployment capability is one of the key advantages of UAVs; however, ensuring that the necessary infrastructure and personnel are readily available at the required location is critical [72,76].
- Search Planning and Strategy Optimisation:
Developing effective search plans and optimizing search strategies for UAVs in SAR is a non-trivial task. Factors such as the size of the search area, terrain characteristics, environmental conditions, sensor capabilities, and battery life must be carefully considered to maximise the probability of detection within the available time.
While various path planning algorithms exist, adapting them to the specific constraints and objectives of SAR missions, including exploring unknown environments and accounting for uncertainties, requires further research. Combining centralised and distributed control approaches may be beneficial for managing multiple UAVs in a search operation [88,89].
4.3. Ethical and Societal Considerations
The increasing use of aerial robots in SAR operations also raises important ethical and societal considerations.
- Data Privacy and Security:
UAVs equipped with cameras and other sensors collect sensitive data, potentially including images and videos of individuals. Ensuring the privacy and security of this data is paramount. Protocols for responsible data handling, storage, and usage must be in place to prevent misuse or unauthorised access, especially when interviewing victims or their families [71,90].
- Public Perception and Acceptance:
The public perception and acceptance of drones operating in SAR scenarios can influence their successful deployment. Concerns about noise pollution, potential for misuse, and the feeling of being surveilled may lead to public resistance. Clear communication about the benefits of drones in saving lives and the measures taken to address privacy concerns is essential to foster public trust and acceptance [91].
- Responsible and Compliant Drone Usage:
Ensuring that drones are used responsibly and in compliance with ethical guidelines and regulations is crucial for the long-term sustainability of this technology in SAR. This includes adhering to airspace restrictions, obtaining necessary permissions, and operating drones in a manner that minimises risks to people and property. Emphasis on responsible and compliant drone usage is a key consideration [92] .
5. Future Directions and Emerging Trends
The field of using UAVs in SAR operations is dynamic, with ongoing research and technological advancements continually shaping its future trajectory. This section explores several key areas of future development and emerging trends that promise to further enhance the capabilities and impact of UAVs in saving lives and improving the efficiency of rescue missions.
5.1. Advancements in UAV Technology
Significant progress in UAV technology is expected to address current limitations and unlock new possibilities for SAR applications. Improved battery life and energy efficiency are critical for extending the operational range and endurance of drones. Future research focuses on high-energy-density battery technologies, intelligent energy management systems, and even alternative power sources like solar energy. This will allow UAVs to cover larger areas and remain airborne for longer durations, crucial in extensive search operations [93].
Enhanced sensor capabilities and miniaturisation will enable UAVs to gather more comprehensive and detailed information. Advancements in thermal imaging, infrared sensors, optical cameras, LiDAR, and acoustic sensors, coupled with their decreasing size and weight, will allow for more versatile payloads without compromising flight time or agility. The integration of multi-modal sensor data will improve target perception, localization, and identification, even in challenging conditions like low light or dense vegetation [94].
The development of more robust and agile UAV designs is essential for operating in the diverse and often harsh environments encountered during SAR missions. This includes designs capable of withstanding adverse weather conditions, navigating complex terrains such as forests and mountains, and even operating in confined spaces within urban environments. Innovations like tiltable rotors are enhancing the manoeuvrability of multirotor UAVs, allowing for more adaptive movement in complex scenarios.
Increased autonomy and Artificial Intelligence (AI) integration represent a transformative trend. AI algorithms are being developed for autonomous navigation, path planning, object recognition, and decision-making. Deep learning techniques, particularly Convolutional Neural Networks (CNNs), are proving effective for real-time image analysis and target identification from aerial imagery. Future AI advancements will lead to more intelligent and autonomous drones capable of performing complex tasks with minimal human intervention, enhancing precision and reducing response times.
Swarm robotics and multi-agent systems hold significant potential for large-scale SAR operations. Controlling and coordinating multiple UAVs to collaboratively search vast areas, share information, and perform tasks autonomously can dramatically improve efficiency and coverage [95]. Research is ongoing in developing effective control paradigms, task allocation algorithms, and communication strategies for UAV swarms [96,97,98]. A suggested model for swarm drone-based SAR system is depicted in Figure 7.
Improved communication and networking capabilities are vital for seamless coordination among SAR teams and data transmission. UAVs can act as communication relays in areas with poor or no cellular coverage, ensuring connectivity. Future developments include enhancing UAV ad hoc networks, optimizing communication efficiency, and exploring technologies like software-defined radio for flexible communication links. The deployment of UAVs as mobile base stations to extend network coverage in disaster zones is also a promising area.
Integration with other technologies will further amplify the impact of UAVs in SAR. This includes the fusion of data with Geographic Information Systems (GIS), the integration of Internet of Things (IoT) sensors for enhanced situational awareness, and the use of augmented reality for providing real-time information to rescue personnel. The MOBNET system, for instance, aims to use combined DCT-EGNSS technology for victim tracking.
Finally, standardisation and regulatory evolution are crucial for the widespread and safe adoption of UAVs in SAR. As the technology matures, clear guidelines, protocols, and regulations are needed to govern their deployment, ensuring responsible and compliant usage while facilitating their integration into emergency response frameworks.
5.2. Focus on Specific Environments and Applications
Future advancements will also see a greater focus on tailoring UAV capabilities and operational protocols to specific environmental challenges and application requirements.
Enhanced UAV capabilities for Forest SAR will address the unique difficulties posed by dense vegetation, rugged terrain, and limited visibility. This includes developing improved foliage penetration technologies, advanced thermal imaging for detecting heat signatures, and robust navigation systems capable of operating without reliable GPS signals. Lightweight and agile UAVs, such as quadrotors, will be further optimized for occupancy network-based search tasks in forested areas.
Advanced systems for Mountain and Avalanche Rescue will leverage UAVs to mitigate risks to rescuers and expedite victim location in hazardous alpine environments. This includes developing UAVs capable of operating in low temperatures and strong winds, equipped with sensors for detecting buried victims (e.g., avalanche transceivers), and potentially even delivering emergency supplies. Research into UAV positioning and collision avoidance based on RSS measurements is also relevant in these challenging terrains.
Improved Maritime SAR Operations with UAVs will focus on enhancing their ability to operate over water, withstand marine weather conditions, and integrate with traditional maritime search assets. This includes developing long-endurance UAVs with robust thermal imaging for detecting survivors in the water, the capacity to deploy flotation devices, and reliable communication systems for coordinating with vessels and coastal authorities.
Urban SAR in Complex and Collapsed Structures requires UAVs with exceptional agility, obstacle avoidance capabilities, and the ability to navigate within confined and GPS-denied environments. Miniaturised drones equipped with advanced sensors like web cameras and IR cameras can penetrate debris of collapsed buildings to locate victims. The development of SLAM (Simultaneous Localization and Mapping) technologies will be crucial for autonomous navigation and mapping within these complex environments.
5.3. Human-Robot Collaboration
The future of UAVs in SAR will also heavily involve human-robot collaboration. Rather than completely replacing human rescuers, UAVs will act as powerful tools to augment their capabilities and enhance their safety. This includes providing real-time aerial imagery and data to inform search strategies, identifying high-probability areas for ground teams to focus on, and assisting with communication and logistical support. Effective human-machine interfaces and training protocols will be essential to maximise the benefits of this collaboration.
5.4. Data Fusion and Analytics for Enhanced Situational Awareness
The vast amounts of data collected by UAVs and other sources will need to be effectively processed and analyzed to provide enhanced situational awareness for SAR teams. This involves developing advanced data fusion techniques to integrate information from various sensors and sources, as well as employing sophisticated analytics and machine learning algorithms to extract meaningful insights, predict victim locations, and optimize resource allocation. Real- time data analysis and decision support systems will be critical for making timely and informed decisions in dynamic emergency situations. Figure 8 illustrates a Workflow of UAV-assisted SAR operations, covering data collection, fusion, machine learning analysis, real-time decision support, and operational deployment.
The future of UAVs in SAR is exceptionally promising. Continuous innovation in core UAV technologies, a growing focus on specific operational environments, the synergistic integration of AI and other technologies, and the evolution of regulatory frameworks will undoubtedly solidify UAVs as indispensable tools in the global effort to enhance the efficiency, effectiveness, and safety of SAR operations.
6. Conclusion
In conclusion, this review has highlighted the pivotal role and transformative impact of unmanned aerial vehicles, or drones, in modern search and rescue operations. The integration of drone technology represents a significant leap forward in emergency response and disaster management, offering a multitude of benefits that enhance the effectiveness and efficiency of rescue efforts. UAVs offer numerous advantages, including rapid deployment, the ability to cover large and inaccessible areas quickly, the provision of real-time imagery and data, improved situational awareness for rescue teams, and enhanced safety by reducing risks to human personnel. Furthermore, drones can be equipped with various sensors like thermal cameras, proving invaluable in locating missing persons, especially in challenging conditions such as forests or during night operations. They can also aid in risk mitigation by scouting dangerous areas and even restoring communication systems in remote locations. However, the deployment of UAVs in SAR also faces limitations, including constraints in battery life, susceptibility to adverse weather conditions, and existing aviation regulations that can restrict their operational range and conditions. Ethical considerations regarding data privacy and security are also paramount.
Despite these challenges, the future potential of UAV technology in SAR remains exceedingly promising. Ongoing advancements in artificial intelligence (AI), sensor technology, and autonomous capabilities are continually enhancing the abilities of these aerial systems. The integration of AI algorithms enables drones to process data in real-time, autonomously navigate complex environments, and improve target identification. Continued research into developing lightweight algorithms, improving energy efficiency, and enhancing communication networks will be crucial in overcoming current limitations and further optimizing UAV performance in SAR missions.
Ultimately, realising the full potential of UAVs in safeguarding lives necessitates continued innovation and robust collaboration among government agencies, humanitarian organisations, researchers, and the drone industry. As forested regions and other challenging terrains continue to pose significant difficulties for traditional SAR efforts, the ongoing development and seamless integration of UAV technology promise to significantly enhance the effectiveness, efficiency, and safety of rescue operations in the years to come, marking a crucial evolution in the landscape of search and rescue.
Compliance with Ethics Requirements
No dataset was used or generated in this study. All analyses and findings are based on simulation results. The parameters used in this study are available in the main text of the manuscript.
Declaration of competing interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
References
- M. Lyu, Y. Zhao, C. Huang, H. Huang, Unmanned aerial vehicles for search and rescue: A survey, Remote Sensing 15 (2023) 3266. [CrossRef]
- Y. Naidoo, R. Stopforth, G. Bright, Development of an uav for search & rescue applications, in: IEEE Africon’11, IEEE, 2011, pp. 1–6.
- Y. Alqudsi, M. Makaraci, Uav swarms: research, challenges, and future directions, Journal of Engineering and Applied Science 72 (2025) 12.
- C. O. Quero, J. Martinez-Carranza, Unmanned aerial systems in search and rescue: A global perspective on current challenges and future applications, International Journal of Disaster Risk Reduction (2025) 105199. [CrossRef]
- C. Burke, R. M. McWhirter Paul, Veitch-Michaelis, et al., Requirements and limitations of thermal drones for effective search and rescue in marine and coastal areas, Drones 3 (2019) 78–92.
- Albanese, V. Sciancalepore, X. Costa-Pérez, Sardo: An automated search-and-rescue drone-based solution for victims localization, IEEE Transactions on Mobile Computing 21 (2021) 3312–3325. [CrossRef]
- Mishra, D. Garg, P. Narang, V. Mishra, Drone-surveillance for search and rescue in natural disaster, Computer Communications 156 (2020) 1–10. [CrossRef]
- Y. Alqudsi, H. Sulaiman, E. Pehlül, A comprehensive review of vtol uavs: Design, technologies, and applications, Preprints (2025).
- Birk, B. Wiggerich, H. Bülow, S. Schwertfeger, Safety, security, and rescue missions with an unmanned aerial vehicle (uav), Journal of Intelligent & Robotic Systems 64 (2011) 57–76. [CrossRef]
- S. A. H. Mohsan, N. Q. H. Othman, Y. Li, M. H. Alsharif, M. A. Khan, Unmanned aerial vehicles (uavs): Practical aspects, applications, open challenges, security issues, and future trends, Intelligent service robotics 16 (2023) 109–137. [CrossRef]
- S. Ecke, J. Dempewolf, J. Frey, A. Schwaller, E. Endres, H.-J. Klemmt, D. Tiede, T. Seifert, Uav-based forest health monitoring: A systematic review, Remote Sensing 14 (2022) 3205. [CrossRef]
- Colomina, P. Molina, Unmanned aerial systems for photogrammetry and remote sensing: A review, ISPRS Journal of photogrammetry and remote sensing 92 (2014) 79–97.
- T. Niedzielski, M. Jurecka, B. Miziński, J. Remisz, J. Ślopek, W. Spallek, M. Witek-Kasprzak, Ł. Kasprzak, M. Świerczyńska-Chlaściak, A real-time field experiment on search and rescue operations assisted by unmanned aerial vehicles, Journal of Field Robotics 35 (2018) 906–920. [CrossRef]
- Aboelezz, Y. Elqudsi, M. Hassanalian, A. Desoki, Wind tunnel calibration, corrections and experimental validation for fixed-wing micro air vehicles measurements, Aviation 23 (2019) 104–113. [CrossRef]
- S. Oubbati, A. Lakas, P. Lorenz, M. Atiquzzaman, A. Jamalipour, Leveraging communicating uavs for emergency vehicle guidance in urban areas, IEEE Transactions on Emerging Topics in Computing 9 (2019) 1070–1082. [CrossRef]
- G. J. Ducard, M. Allenspach, Review of designs and flight control techniques of hybrid and convertible vtol uavs, Aerospace Science and Technology 118 (2021) 107035.
- Puri, A survey of unmanned aerial vehicles (uav) for traffic surveillance, Department of computer science and engineering, University of South Florida (2005) 1–29.
- E. Petritoli, F. Leccese, L. Ciani, Reliability and maintenance analysis of unmanned aerial vehicles, Sensors 18 (2018) 3171. [CrossRef]
- Ollero, L. Merino, Unmanned aerial vehicles as tools for forest-fire fighting, Forest Ecology and Management 234 (2006) S263. [CrossRef]
- M. Osman, Y. Xia, M. Mahdi, A. Ahmed, Hybrid vtol uav technologies: Efficiency, customization, and sector-specific applications, Alexandria Engineering Journal 120 (2025) 13–49.
- M. Erdelj, E. Natalizio, K. R. Chowdhury, I. F. Akyildiz, Help from the sky: Leveraging uavs for disaster management, IEEE Pervasive Computing 16 (2017) 24–32. [CrossRef]
- C. Vincent-Lambert, A. Pretorius, B. Van Tonder, Use of unmanned aerial vehicles in wilderness search and rescue operations: A scoping review, Wilderness & Environmental Medicine 34 (2023) 580–588. [CrossRef]
- Osmani, D. Schulz, Comprehensive investigation of unmanned aerial vehicles (uavs): An in-depth analysis of avionics systems, Sensors 24 (2024) 3064. [CrossRef]
- C. Amici, F. Ceresoli, M. Pasetti, M. Saponi, M. Tiboni, S. Zanoni, Review of propulsion system design strategies for unmanned aerial vehicles, Applied Sciences 11 (2021) 5209. [CrossRef]
- B. Zhang, Z. Song, F. Zhao, C. Liu, Overview of propulsion systems for unmanned aerial vehicles, Energies 15 (2022) 455. [CrossRef]
- Y. Chang, Y. Cheng, U. Manzoor, J. Murray, A review of uav autonomous navigation in gps-denied environments, Robotics and Autonomous Systems 170 (2023) 104533. [CrossRef]
- Y. Alqudsi, G. El-Bayoumi, A qualitative comparison between the proportional navigation and differential geometry guidance algorithms, INCAS Bulletin 10 (2018).
- M. O. Aqel, M. H. Marhaban, M. I. Saripan, N. B. Ismail, Review of visual odometry: types, approaches, challenges, and applications, SpringerPlus 5 (2016) 1–26. [CrossRef]
- Z. Niu, F. Guo, Q. Shuai, G. Li, B. Zhu, The integration of gps/bds real-time kinematic positioning and visual–inertial odometry based on smartphones, ISPRS International Journal of Geo-Information 10 (2021) 699. [CrossRef]
- X. Gu, G. Zhang, A survey on uav-assisted wireless communications: Recent advances and future trends, Computer Communications 208 (2023) 44–78. [CrossRef]
- B. Li, S. Zhao, R. Miao, R. Zhang, A survey on unmanned aerial vehicle relaying networks, IET communications 15 (2021) 1262–1272. [CrossRef]
- M. Silvagni, A. Tonoli, E. Zenerino, M. Chiaberge, Multipurpose uav for search and rescue operations in mountain avalanche events, Geomatics, Natural Hazards and Risk 8 (2017) 18–33. [CrossRef]
- Y. N. Saravanakumar, M. T. H. Sultan, F. S. Shahar, W. Giernacki, A. Łukaszewicz, M. Nowakowski, A. Holovatyy, S. Stępień, Power sources for unmanned aerial vehicles: a state-of-the art, Applied Sciences 13 (2023) 11932. [CrossRef]
- D. Debnath, F. Vanegas, J. Sandino, A. F. Hawary, F. Gonzalez, A review of uav path-planning algorithms and obstacle avoidance methods for remote sensing applications, Remote Sensing 16 (2024) 4019. [CrossRef]
- Y. S. Alqudsi, A. H. Kassem, G. El-Bayoumi, A general real-time optimization framework for polynomial-based trajectory planning of autonomous flying robots, Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering 237 (2023) 29–41. [CrossRef]
- G. Sonugür, A review of quadrotor uav: Control and slam methodologies ranging from conventional to innovative approaches, Robotics and Autonomous Systems 161 (2023) 104342. [CrossRef]
- Y. Alqudsi, F. C. Bolat, M. Makaraci, Optimal and robust control methodologies for 4dof active suspension systems: A comparative study with uncertainty considerations, Optimal Control Applications and Methods 46 (2025) 3–27. [CrossRef]
- Barzegar, D.-J. Lee, Deep reinforcement learning-based adaptive controller for trajectory tracking and altitude control of an aerial robot, Applied Sciences 12 (2022) 4764. [CrossRef]
- Y. Alqudsi, Advanced control techniques for high maneuverability trajectory tracking in autonomous aerial robots, in: 2024 1st International Conference on Emerging Technologies for Dependable Internet of Things (ICETI), IEEE, 2024, pp. 1–8.
- P. Osco, J. M. Junior, A. P. M. Ramos, L. A. de Castro Jorge, S. N. Fatholahi, J. de Andrade Silva, E. T. Matsubara, H. Pistori, W. N. Gonçalves, J. Li, A review on deep learning in uav remote sensing, International Journal of Applied Earth Observation and Geoinformation 102 (2021) 102456.
- T. Zwęgliński, The use of drones in disaster aerial needs reconnaissance and damage assessment–three-dimensional modeling and orthophoto map study, Sustainability 12 (2020) 6080. [CrossRef]
- S. M. S. M. Daud, M. Y. P. M. Yusof, C. C. Heo, L. S. Khoo, M. K. C. Singh, M. S. Mahmood, H. Nawawi, Applications of drone in disaster management: A scoping review, Science & Justice 62 (2022) 30–42. [CrossRef]
- F. Nex, F. Remondino, Uav for 3d mapping applications: A review. applied geomatics, 6 (1), 1–15, 2014. [CrossRef]
- G. Pajares, Overview and current status of remote sensing applications based on unmanned aerial vehicles (uavs), Photogrammetric Engineering & Remote Sensing 81 (2015) 281–330. [CrossRef]
- Y. Yiğit, M. Uysal, Automatic crack detection and structural inspection of cultural heritage buildings using uav photogrammetry and digital twin technology, Journal of Building Engineering 94 (2024) 109952. [CrossRef]
- N. Kerle, F. Nex, M. Gerke, D. Duarte, A. Vetrivel, Uav-based structural damage mapping: A review, ISPRS international journal of geo- information 9 (2019) 14.
- C. Zhang, Y. Zou, J. Dimyadi, Integrating uav and bim for automated visual building inspection: a systematic review and conceptual framework, in: IOP Conference Series: Earth and Environmental Science, volume 1101, IOP Publishing, 2022, p. 062030.
- D. C. De Oliveira, M. A. Wehrmeister, Using deep learning and low-cost rgb and thermal cameras to detect pedestrians in aerial images captured by multirotor uav, Sensors 18 (2018) 2244.
- X. Wu, W. Li, D. Hong, R. Tao, Q. Du, Deep learning for unmanned aerial vehicle-based object detection and tracking: A survey, IEEE Geoscience and Remote Sensing Magazine 10 (2021) 91–124. [CrossRef]
- C. Cruz Ulloa, D. Orbea, J. del Cerro, A. Barrientos, Thermal, multispectral, and rgb vision systems analysis for victim detection in sar robotics, Applied Sciences 14 (2024) 766. [CrossRef]
- Y. Inoue, A. Sashima, K. Kurumatani, Indoor positioning system using beacon devices for practical pedestrian navigation on mobile phone, in: Ubiquitous Intelligence and Computing: 6th International Conference, UIC 2009, Brisbane, Australia, July 7-9, 2009. Proceedings 6, Springer, 2009, pp. 251–265.
- Prata, A. d. S. S. Almeida, F. C. de Souza, P. F. F. Rosa, A. F. P. dos Santos, Developing a uav platform for victim localization on search and rescue operations, in: 2022 IEEE 31st International Symposium on Industrial Electronics (ISIE), IEEE, 2022, pp. 721–726.
- Ramtohul, K. K. Khedo, Mobile positioning techniques and systems: A comprehensive review, Mobile Information Systems 2020 (2020) 3708521. [CrossRef]
- N. Denissova, S. Nurakynov, O. Petrova, D. Chepashev, G. Daumova, A. Yelisseyeva, Remote sensing techniques for assessing snow avalanche formation factors and building hazard monitoring systems, Atmosphere 15 (2024) 1343. [CrossRef]
- P. Arroyo, J. L. Herrero, J. Lozano, P. Montero, Integrating lora-based communications into unmanned aerial vehicles for data acquisition from terrestrial beacons, Electronics 11 (2022) 1865. [CrossRef]
- Y. Alqudsi, G. El-Bayoumi, Modeling of target tracking system for homing missiles and air defense systems, INCAS Bulletin 10 (2018).
- Y. Chang, Inflight tracking method with beacon system and scouting drone, in: Advances in Computer Science and Ubiquitous Computing: CSA-CUTE 2019, Springer, 2021, pp. 427–433.
- S. Alqefari, M. E. B. Menai, Multi-uav task assignment in dynamic environments: Current trends and future directions, Drones 9 (2025) 75. [CrossRef]
- S. A. Ghauri, M. Sarfraz, R. A. Qamar, M. F. Sohail, S. A. Khan, A review of multi-uav task allocation algorithms for a search and rescue scenario, Journal of Sensor and Actuator Networks 13 (2024) 47. [CrossRef]
- Y. Alqudsi, M. Makaraci, Swarm robotics for autonomous aerial robots: Features, algorithms, control techniques, and challenges, in: 2024 4th International Conference on Emerging Smart Technologies and Applications (eSmarTA), IEEE, 2024, pp. 1–9.
- Y. Alqudsi, M. Makaraci, Towards optimal guidance of autonomous swarm drones in dynamic constrained environments, Expert Systems 42 (2025) e70067. [CrossRef]
- P. Ghassemi, S. Chowdhury, Multi-robot task allocation in disaster response: Addressing dynamic tasks with deadlines and robots with range and payload constraints, Robotics and Autonomous Systems 147 (2022) 103905. [CrossRef]
- Munasinghe, A. Perera, R. C. Deo, A comprehensive review of uav-ugv collaboration: Advancements and challenges, Journal of Sensor and Actuator Networks 13 (2024) 81. [CrossRef]
- C. Goerzen, Z. Kong, B. Mettler, A survey of motion planning algorithms from the perspective of autonomous uav guidance, Journal of Intelligent and Robotic Systems 57 (2010) 65–100. [CrossRef]
- Y. Alqudsi, Analysis and implementation of motion planning algorithms for real-time navigation of aerial robots in dynamic environments, in: 2024 4th International Conference on Emerging Smart Technologies and Applications (eSmarTA), IEEE, 2024, pp. 1–10.
- S. Ghambari, M. Golabi, L. Jourdan, J. Lepagnot, L. Idoumghar, Uav path planning techniques: a survey, RAIRO-Operations Research 58 (2024) 2951–2989.
- Kamel, S. Verling, O. Elkhatib, C. Sprecher, P. Wulkop, Z. Taylor, R. Siegwart, I. Gilitschenski, The voliro omniorientational hexacopter: An agile and maneuverable tiltable-rotor aerial vehicle, IEEE Robotics & Automation Magazine 25 (2018) 34–44. [CrossRef]
- D. Floreano, R. J. Wood, Science, technology and the future of small autonomous drones, nature 521 (2015) 460–466. [CrossRef]
- D. J. Richter, R. A. Calix, K. Kim, A review of reinforcement learning for fixed-wing aircraft control tasks, IEEE Access (2024). [CrossRef]
- Saunders, S. Saeedi, W. Li, Autonomous aerial robotics for package delivery: A technical review, Journal of Field Robotics 41 (2024) 3–49. [CrossRef]
- R. Clarke, L. B. Moses, The regulation of civilian drones’ impacts on public safety, Computer law & security review 30 (2014) 263–285. [CrossRef]
- E. Yucesoy, B. Balcik, E. Coban, The role of drones in disaster response: A literature review of operations research applications, International Transactions in Operational Research 32 (2025) 545–589. [CrossRef]
- Mozaffari, W. Saad, M. Bennis, Y.-H. Nam, M. Debbah, A tutorial on uavs for wireless networks: Applications, challenges, and open problems, IEEE communications surveys & tutorials 21 (2019) 2334–2360.
- Li, G. Zhang, C. Jiang, W. Zhang, A survey of maritime unmanned search system: Theory, applications and future directions, Ocean Engineering 285 (2023) 115359. [CrossRef]
- Casper, R. R. Murphy, Human-robot interactions during the robot-assisted urban search and rescue response at the world trade center, IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics) 33 (2003) 367–385. [CrossRef]
- Erdelj, M. Król, E. Natalizio, Wireless sensor networks and multi-uav systems for natural disaster management, Computer Networks 124 (2017) 72–86. [CrossRef]
- L. Cummings, S. Bruni, S. Mercier, P. Mitchell, Automation architecture for single operator, multiple uav command and control (2007).
- C. Xiao, B. Wang, D. Zhao, C. Wang, Comprehensive investigation on lithium batteries for electric and hybrid-electric unmanned aerial vehicle applications, Thermal Science and Engineering Progress 38 (2023) 101677. [CrossRef]
- Ortiz-Carretero, A. Castillo Pardo, I. Goulos, V. Pachidis, Impact of adverse environmental conditions on rotorcraft operational performance and pollutant emissions, Journal of Engineering for Gas Turbines and Power 140 (2018) 021201. [CrossRef]
- D. Scaramuzza, M. C. Achtelik, L. Doitsidis, F. Friedrich, E. Kosmatopoulos, A. Martinelli, M. W. Achtelik, M. Chli, S. Chatzichristofis, L. Kneip, et al., Vision-controlled micro flying robots: from system design to autonomous navigation and mapping in gps-denied environments, IEEE Robotics & Automation Magazine 21 (2014) 26–40. [CrossRef]
- R. Rukaiya, S. A. Khan, M. U. Farooq, I. Matloob, Communication architecture and operations for sdr-enabled uavs network in disaster-stressed areas, Ad Hoc Networks 160 (2024) 103506. [CrossRef]
- S. Hayat, E. Yanmaz, R. Muzaffar, Survey on unmanned aerial vehicle networks for civil applications: A communications viewpoint, IEEE communications surveys & tutorials 18 (2016) 2624–2661. [CrossRef]
- Y. Zeng, R. Zhang, T. J. Lim, Wireless communications with unmanned aerial vehicles: Opportunities and challenges, IEEE Communications magazine 54 (2016) 36–42. [CrossRef]
- R. Fang, P. He, Y. Gao, A review of slam techniques and applications in unmanned aerial vehicles, in: Journal of Physics: Conference Series, volume 2798, IOP Publishing, 2024, p. 012033.
- F. Huang, S. Chen, Q. Wang, Y. Chen, D. Zhang, Using deep learning in an embedded system for real-time target detection based on images from an unmanned aerial vehicle: Vehicle detection as a case study, International Journal of Digital Earth 16 (2023) 910–936. [CrossRef]
- Goodrich, A. C. Schultz, et al., Human–robot interaction: a survey, Foundations and trends® in human–computer interaction 1 (2008) 203–275.
- Braverman, et al., Unmanned aerial systems (uas) in urban search and rescue-methodology, capacity development, and integration, J. Emerg. Manag 19 (2021) 33–38. [CrossRef]
- V. Ajith, K. Jolly, Unmanned aerial systems in search and rescue applications with their path planning: a review, in: Journal of Physics: Conference Series, volume 2115, IOP Publishing, 2021, p. 012020.
- Y. Alqudsi, Coordinated formation control for swarm flying robots, in: 2024 1st International Conference on Emerging Technologies for Dependable Internet of Things (ICETI), IEEE, 2024, pp. 1–8.
- Y. Mekdad, A. Aris, L. Babun, A. El Fergougui, M. Conti, R. Lazzeretti, A. S. Uluagac, A survey on security and privacy issues of uavs, Computer networks 224 (2023) 109626. [CrossRef]
- H. Sabino, R. V. Almeida, L. B. de Moraes, W. P. da Silva, R. Guerra, C. Malcher, D. Passos, F. G. Passos, A systematic literature review on the main factors for public acceptance of drones, Technology in Society 71 (2022) 102097. [CrossRef]
- Wang, M. Christen, M. Hunt, N. Biller-Andorno, Supporting value sensitivity in the humanitarian use of drones through an ethics assessment framework, International Review of the Red Cross 104 (2022) 1397–1428. [CrossRef]
- N. Boukoberine, Z. Zhou, M. Benbouzid, A critical review on unmanned aerial vehicles power supply and energy management: Solutions, strategies, and prospects, Applied Energy 255 (2019) 113823. [CrossRef]
- Antonakakis, M. Zervakis, Advances in unmanned aerial vehicle-based sensing and imaging, 2024. [CrossRef]
- Y. Alqudsi, Synchronous task allocation and trajectory optimization for autonomous drone swarm, in: 2024 1st International Conference on Emerging Technologies for Dependable Internet of Things (ICETI), IEEE, 2024, pp. 1–8.
- M.-T. O. Hoang, K. A. R. Grøntved, N. van Berkel, M. B. Skov, A. L. Christensen, T. Merritt, Drone swarms to support search and rescue operations: Opportunities and challenges, Cultural Robotics: Social Robots and Their Emergent Cultural Ecologies (2023) 163–176.
- Y. Alqudsi, Integrated optimization of simultaneous target assignment and path planning for aerial robot swarm, The Journal of Supercomputing 81 (2025) 1–24. [CrossRef]
- J. Schwarzrock, I. Zacarias, A. L. Bazzan, R. Q. de Araujo Fernandes, L. H. Moreira, E. P. de Freitas, Solving task allocation problem in multi unmanned aerial vehicles systems using swarm intelligence, Engineering Applications of Artificial Intelligence 72 (2018) 10–20. [CrossRef]
Figure 1.
History of Drone-Based Search and Rescue Systems.
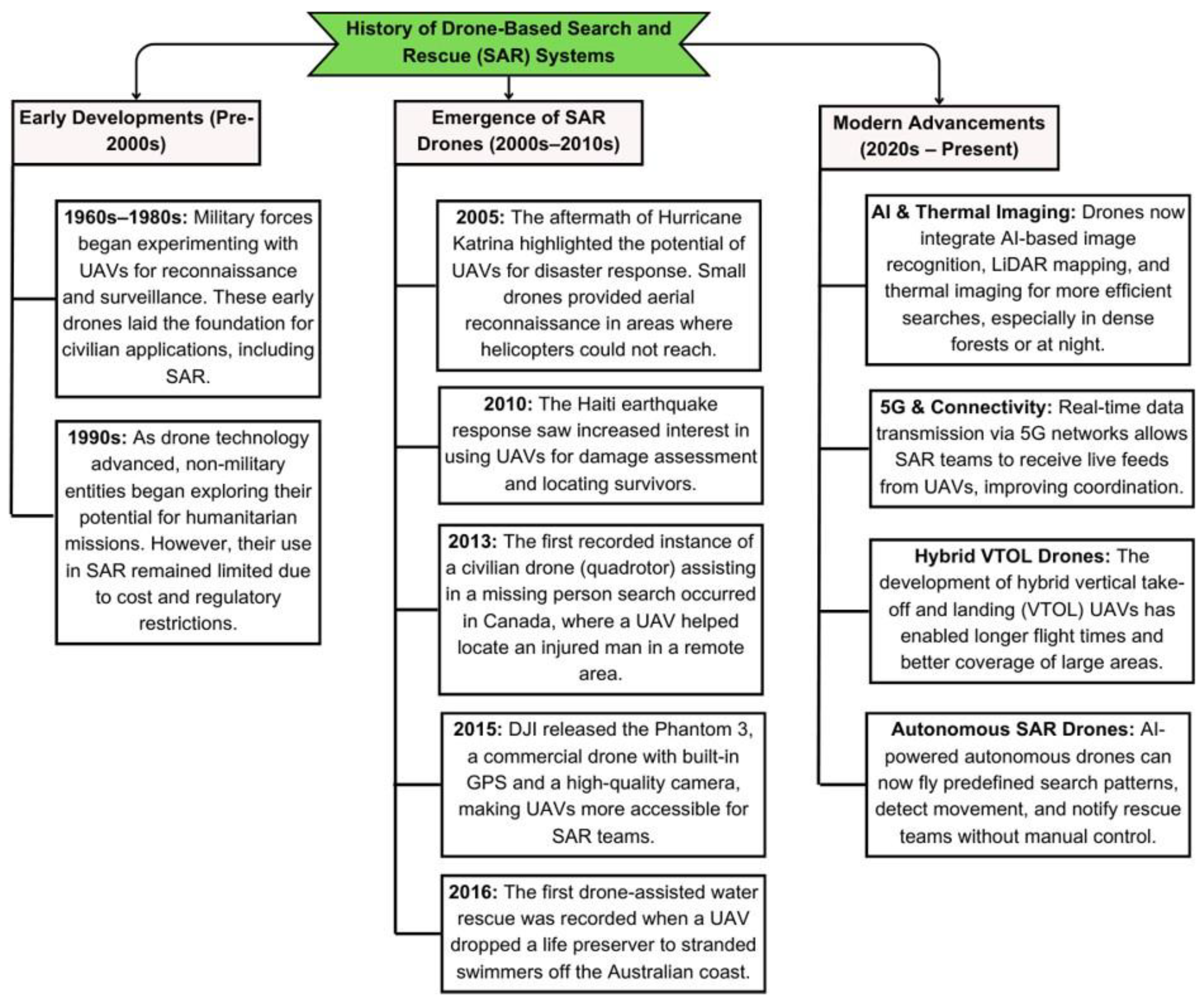
Figure 2.
Different configurations of UAVs utilized in the SAR operations.
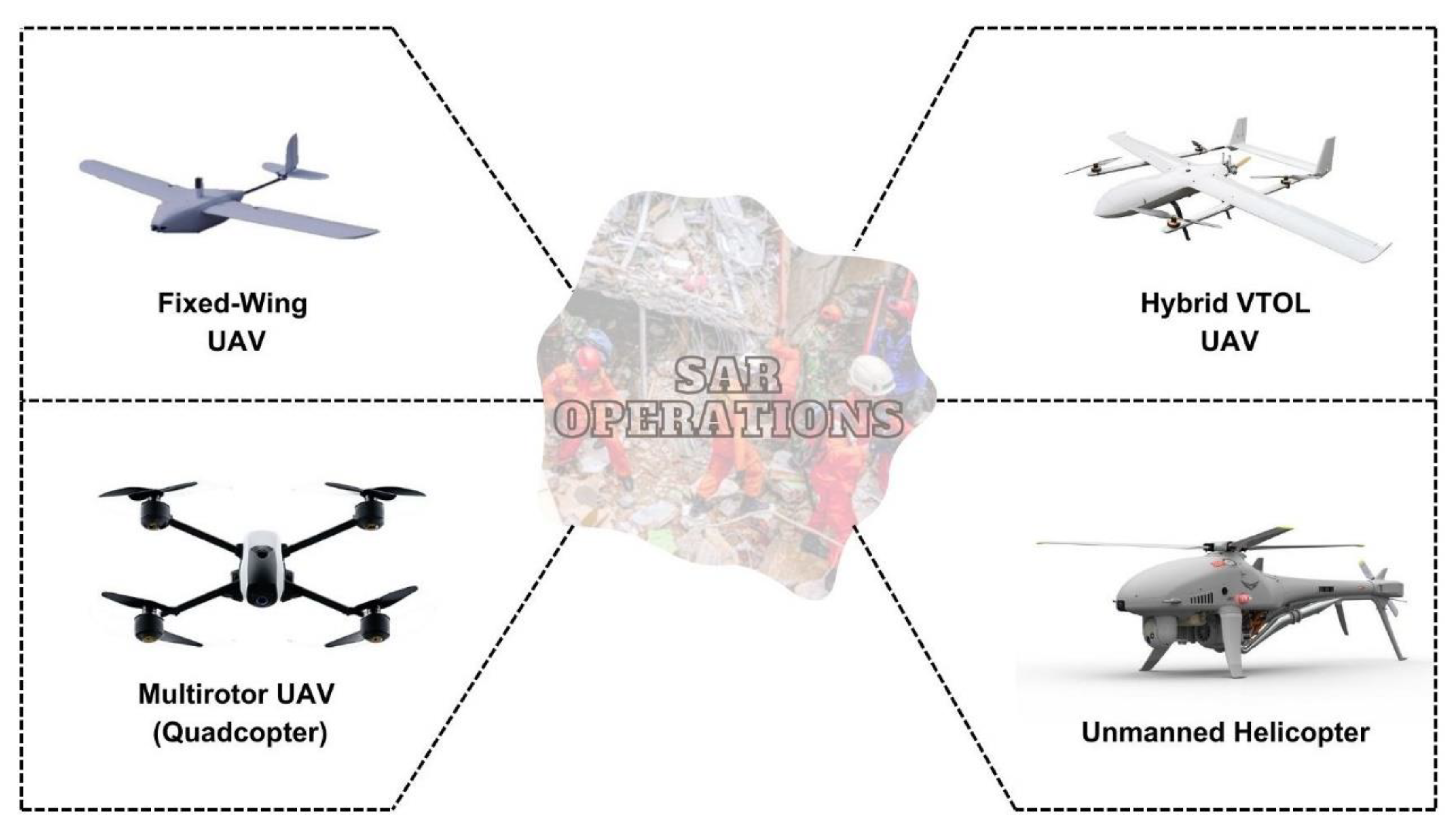
Figure 3.
Key Hardware Components used in the Drone based SAR system.

Figure 4.
Advances in search and rescue operations with the integration of UAVs.
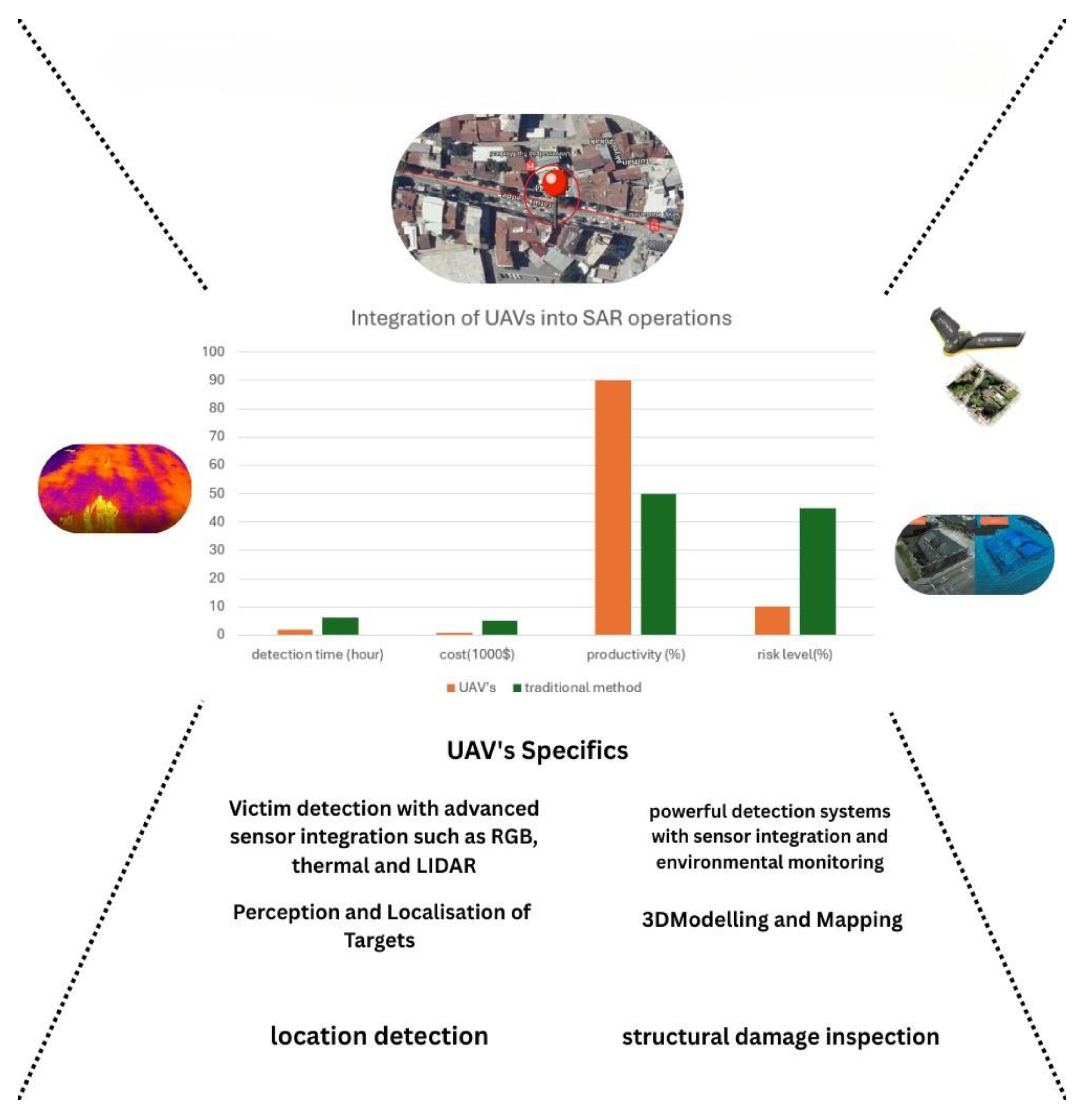
Figure 5.
A general framework for the drone-based SAR system.
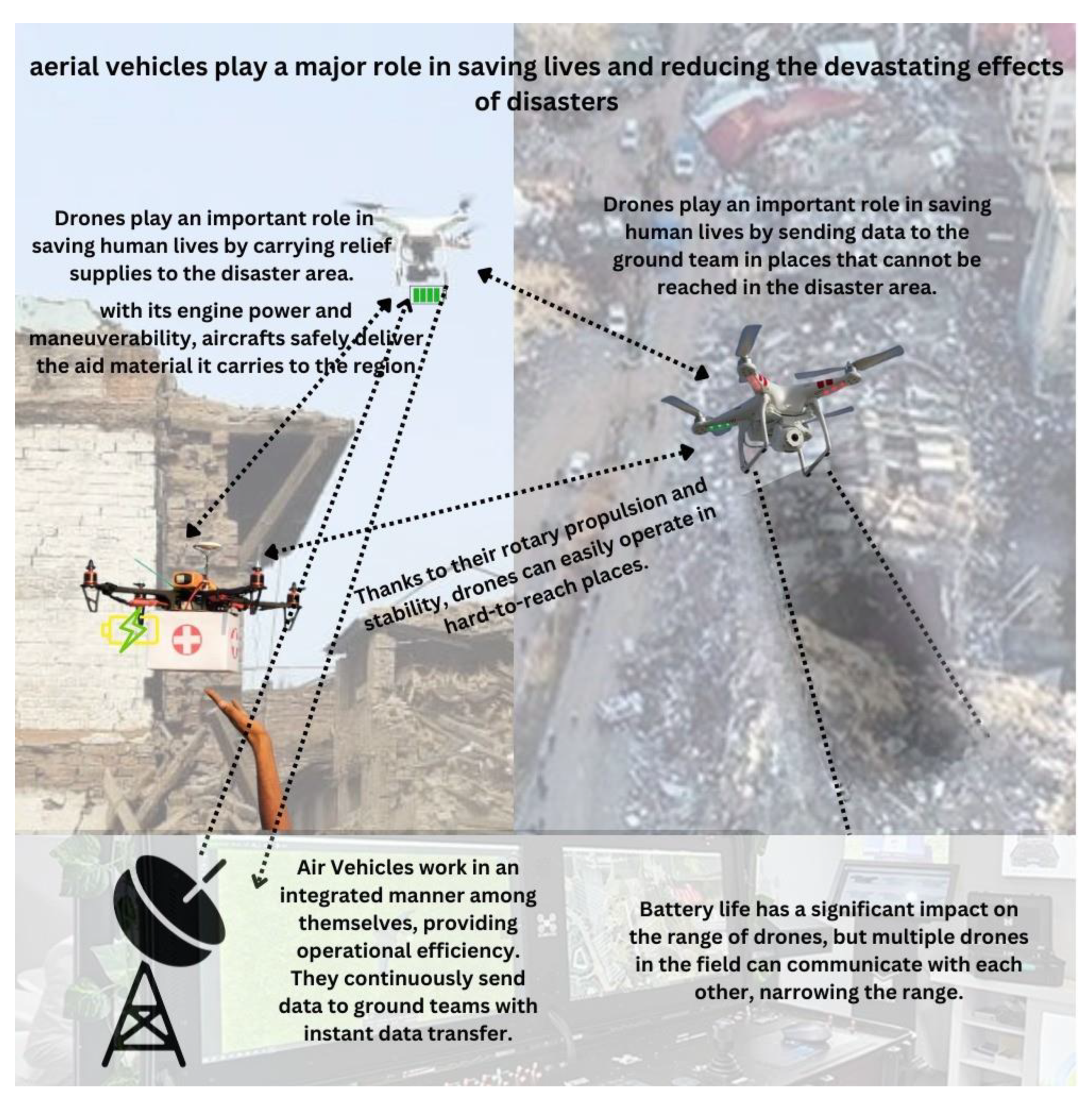
Figure 6.
The key challenges and limitations of aerial robots in SAR.
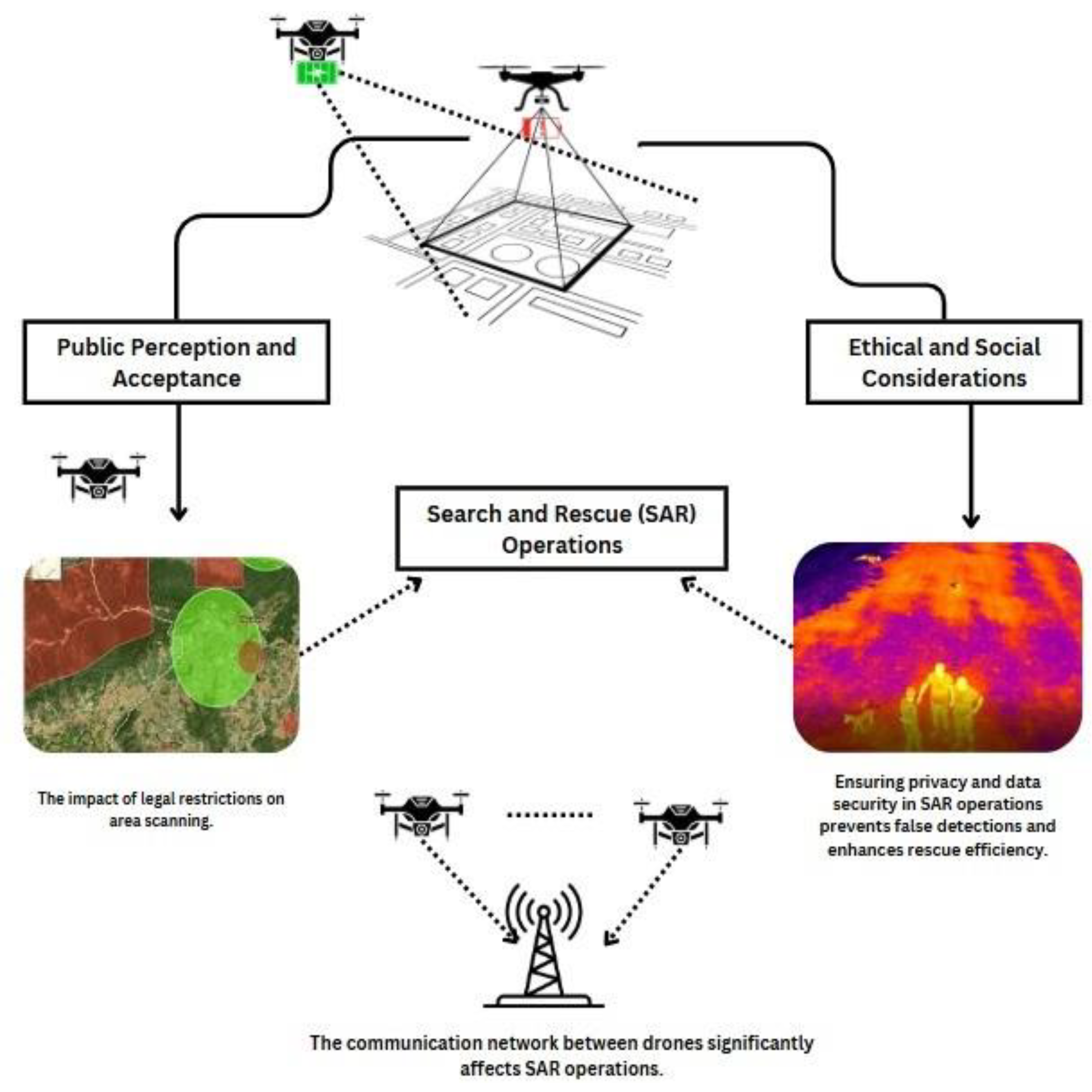
Figure 7.
A model of swarm drone-based SAR system.
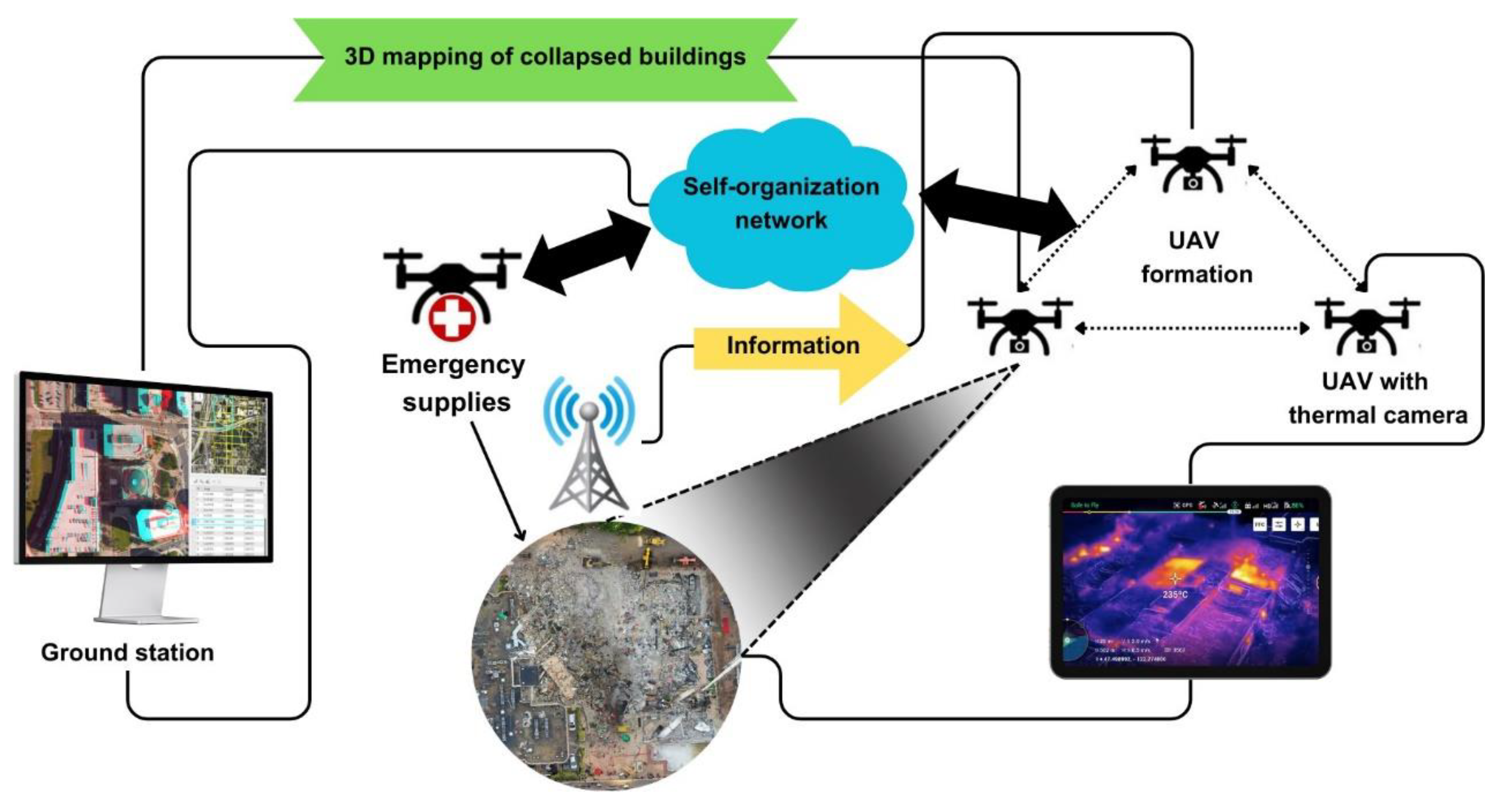
Figure 8.
Workflow of UAV-assisted SAR operations, covering data collection, fusion, machine learning analysis, real-time decision support, and operational deployment.
Figure 8.
Workflow of UAV-assisted SAR operations, covering data collection, fusion, machine learning analysis, real-time decision support, and operational deployment.
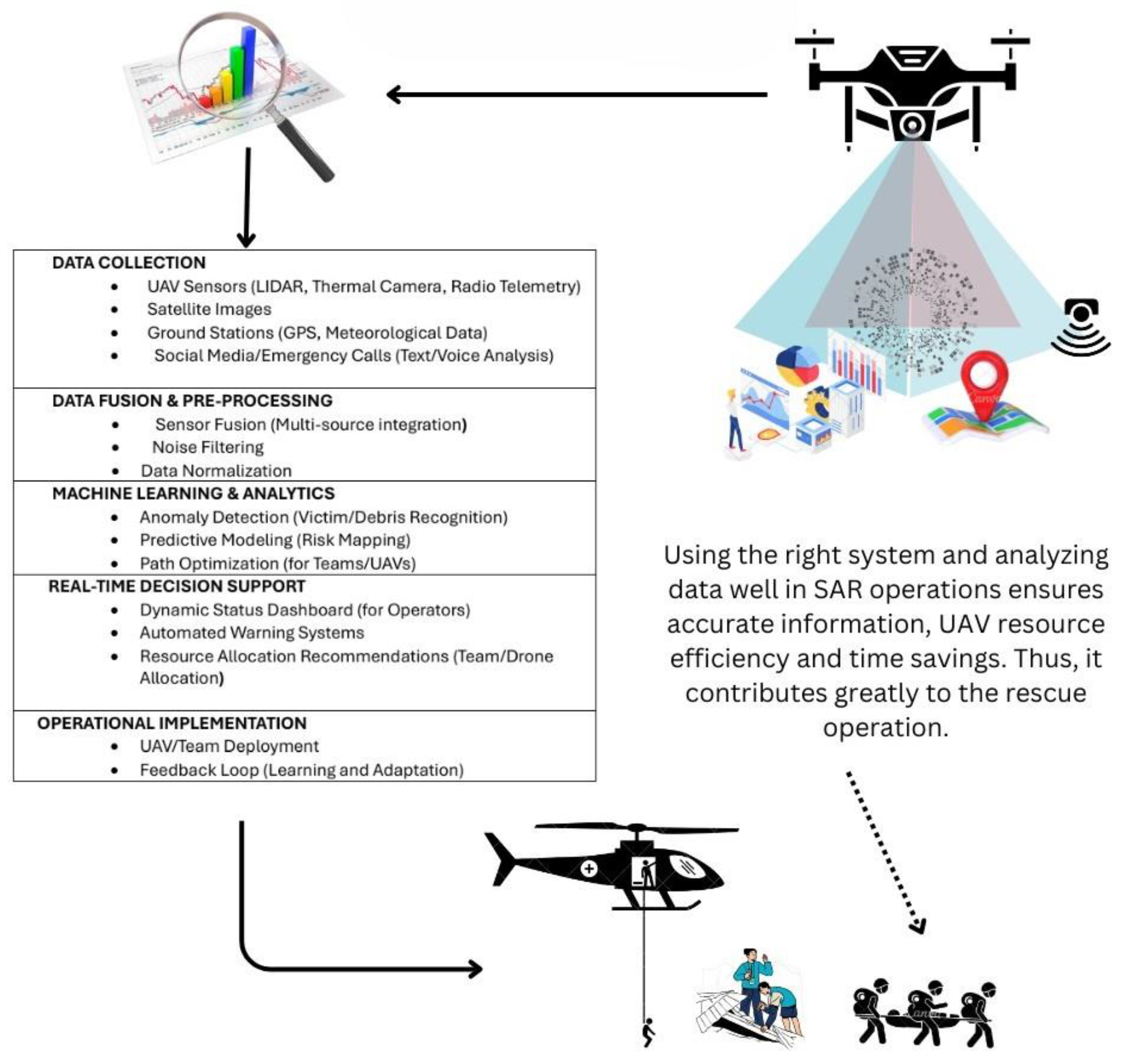
Table 1.
Comparison of UAV Types for SAR Operations.
| Feature | Fixed-Wing UAV | Multirotor UAV (Quadcopter) | Unmanned Helicopter | Hybrid VTOL UAV |
|---|---|---|---|---|
| Advantages | Long range, high en- durance, efficient for large area search | High manoeuvrability, VTOL, rapid deploy- ment | Agile in complex en- vironments, swift pose changes | VTOL capabil- ity, long range |
| Disadvantages | Requires open space for take-off/landing, limited hovering, less agile at low speeds | Higher energy consumption, limited range compared to fixed-wing | Complex structure, high maintenance cost | Increased drag and weight, complex control |
| Suitable SAR Scenarios | Wide area surveillance, large- scale search in open terrain |
Confined spaces, rapid assessment, close-up inspection, urban SAR | Complex terrain, precise positioning in cluttered environments |
Communication relay, scenarios requiring both range and VTOL |
Table 2.
Key Hardware Components and Their Relevance in SAR.
| Component | Functionality | Relevance to SAR |
|---|---|---|
| Airframe & Propulsion Sensors Navigation & Positioning Communication Systems Payload Delivery Systems Power Sources & Manage- ment |
Structural support, generat- ing lift and thrust for flight Detecting and perceiving the environment (visual, thermal, etc.) Determining the UAV’s location and enabling autonomous movement Maintaining control and transmitting data between the UAV and ground teams Carrying and deploying sup- plies or specialized equipment Providing and regulating the energy required for operation |
Enables aerial operation and determines flight characteristics (speed, range, en- durance, manoeuvrability) Crucial for locating missing persons, assess- ing hazards, and gathering situational aware- ness (cameras, thermal imagers, LiDAR) Essential for accurately covering search areas and reaching victims (GPS, IMU, SLAM) Facilitates remote operation, real-time data sharing, and coordination among rescue per- sonnel (wireless links, relays) Enables the delivery of aid to victims and the deployment of specific tools (e.g., communi- cation devices) Directly impacts flight duration and opera- tional range; efficient power management is critical for mission success |
Table 5.
Applications of UAVs in On-Site Monitoring, Modelling, and Analysis.
| Application | Description | Key Technologies/Sensors | Benefits |
|---|---|---|---|
| Aerial Recon- naissance | Rapid overview of disaster ar- eas to identify hazards and potential victim locations. | High-resolution RGB cam- eras, thermal imagers | Quick assessment of large areas, enhanced situational awareness, improved safety for ground teams. |
| 3D Modelling and Mapping | Creation of accurate digital maps and 3D models of af- fected areas to support plan- ning and resource allocation. | RGB cameras, Structure from Motion (SfM) software | Detailed spatial information, damage assessment, volume measurements, aid in evacu- ation planning. |
| Structural Damage Inspection | Analysis of building stability and identification of collapse risks to ensure safer rescue operations. | High-resolution cameras, 3D point cloud processing, deep learning algorithms (CNN, Mask-R-CNN) | Identification of damaged structures, assessment of damage levels, integration with BIM. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



