
Submitted:
29 April 2025
Posted:
30 April 2025
You are already at the latest version
Abstract
This review article examines the landscape of Vertical Take-Off and Landing (VTOL) Unmanned Aerial Vehicles (UAVs), highlighting their transformative potential and the sub- stantial challenges in their development. VTOL technology combines the hovering capabilities of multirotor systems with the speed and range of fixed-wing aircraft, positioning them as versatile tools for diverse applications including urban air mobility, remote area operations, and various other missions. The review identifies key challenges that include the complex design and control of hybrid propulsion systems, the need for efficient electric propulsion and high- density batteries, and integration into air traffic management (ATM) systems. It also addresses the necessity for urban infrastructure, advanced autonomous systems using multiple sensors and AI, and the development of a clear regulatory framework. The article underscores the need for a multidisciplinary approach involving researchers, engineers, policymakers and industry stakeholders to overcome these challenges and foster the successful integration of VTOL UAVs. The conclusion emphasizes that while VTOL UAV technology offers significant potential, its realization hinges on addressing these challenges through collaborative research, robust regulations, and technological innovation.
Keywords:
eVTOL
; Unmanned Aerial Systems
; Autonomous Aerial Robots
; Drones
; Hybrid Aircraft
1. Introduction
Unmanned Aerial Vehicles (UAVs), commonly referred to as drones, have witnessed exponential growth over the past decade, revolutionizing a wide array of industries ranging from military and security to agriculture, environmental monitoring, and logistics [1]. Among the various advancements in UAV technology, Vertical Take-Off and Landing (VTOL) systems have emerged as a groundbreaking innovation, combining the hovering capabilities of rotary-wing aircraft with the speed and range of fixed-wing designs [2,3]. This hybrid capability offers unparalleled operational flexibility, making VTOL UAVs particularly well-suited for missions in diverse and challenging environments, such as urban areas, dense forests, and mountainous regions.
The core advantage of VTOL UAVs lies in their ability to take off and land vertically, eliminating the need for runways or launching devices. This feature is especially beneficial in space-constrained environments, where traditional aircraft would struggle to operate. Furthermore, their hovering capabilities enable precise operations such as surveillance, inspection, and search and rescue missions, which are often critical in emergency response scenarios [4]. The versatility of VTOL technology addresses a key limitation of conventional fixed-wing UAVs, which require runways, and multi-rotor UAVs, which typically have limited range and endurance. This dual functionality is increasingly important for tasks that demand both vertical maneuverability and efficient horizontal flight, making VTOL UAVs a transformative tool in modern aviation [5].
The development of VTOL UAVs is driven by the need for versatile and efficient aircraft capable of handling a wide range of missions [6]. These missions include applications such as urban air mobility (UAM), payload delivery, emergency response, and infrastructure inspection. The integration of VTOL capabilities into UAV designs is not merely a matter of convenience but rather a necessity to meet the evolving demands of modern applications [7,8]. In particular, the rise of urban air mobility requires vehicles that can operate safely and efficiently in congested cityscapes. This involves not only the design of the aircraft but also the development of supporting technologies such as advanced control systems, energy management, and air traffic management (ATM) strategies [9].
The VTOL technology roadmap, as depicted in Figure 1, showcases the key milestones in propulsion, autonomy, and infrastructure from early prototypes to future autonomous operations [10]. This roadmap highlights the rapid evolution of VTOL UAVs, from their initial conceptual designs to their current state as sophisticated, multi-functional aircraft capable of performing complex missions. The roadmap also underscores the importance of continuous innovation in propulsion systems, autonomous flight control, and urban infrastructure to fully realize the potential of VTOL UAVs.
Despite their significant potential, the development and integration of VTOL UAVs present substantial challenges [11]. These include the complex design and control of hybrid propulsion systems, the need for efficient electric propulsion and high-density batteries, and the integration of these aircraft into existing air traffic management systems. Additionally, the development of urban infrastructure, such as vertiports and charging stations, is crucial for the widespread adoption of VTOL UAVs in urban environments. Advanced autonomous systems, utilizing multiple sensors and artificial intelligence (AI), are also essential for ensuring the safe and efficient operation of VTOL UAVs in dynamic and unpredictable environments.
Moreover, the regulatory landscape for VTOL UAVs is still evolving, with significant gaps in certification standards, operational procedures, and airspace management [6]. Regulatory bodies such as the Federal Aviation Administration (FAA) and the European Union Aviation Safety Agency (EASA) are actively working to develop specific airworthiness regulations for VTOL aircraft [12]. However, the lack of comprehensive guidelines poses a challenge for manufacturers and operators, necessitating a collaborative effort between researchers, engineers, policymakers, and industry stakeholders to establish a clear and robust regulatory framework.
This review article aims to provide a comprehensive overview of VTOL UAVs, exploring various aspects of their design, technologies, and applications. We will consider the different configurations of VTOL UAVs, including tilt- rotor, tilt-wing, and blended-wing-body designs. In addition, the design methodologies, aerodynamic considerations, and propulsion systems employed in their development will be discussed. The challenges associated with flight control, energy management, and the integration of avionics will also be examined. The regulatory and societal implications of VTOL UAV technology will be addressed, highlighting the need for a multidisciplinary approach to overcome these challenges and foster the successful integration of VTOL UAVs into everyday life.
Finally, the article will highlight future trends and research directions in the field, focusing on the need for autonomous operations, advanced control systems, and improved safety protocols. The goal is to provide a thorough understanding of the current state and future directions of VTOL UAV technology, covering their potential to transform industries and applications across various sectors. By addressing these challenges and leveraging technological innovations, VTOL UAVs have the potential to revolutionize urban air mobility, emergency response, and a host of other applications, paving the way for a new era of aviation.
2. Classification and Configurations of VTOL UAVs
The UAVs encompass a diverse range of designs, each tailored to specific operational requirements as depicted in Figure 2. These designs can be broadly categorised based on their airframe configuration, propulsion mechanisms, and the integration of fixed-wing and rotary-wing flight characteristics [13]. Figure 3 mentions the main components of the well-known VTOL configures. Understanding these classifications is crucial for assessing the suitability of a particular VTOL UAV for a given mission. The primary aim of VTOL designs is to combine the advantages of both fixed-wing aircraft, such as speed and endurance, with the hovering and vertical capabilities of multi-rotor systems [14,15].
One of the main categories is fixed-wing VTOL UAVs, which integrate VTOL capabilities into a traditional fixed- wing design. These aircraft typically employ additional propulsion systems for vertical lift, which can be achieved through various mechanisms such as tilting rotors, tilting wings, or separate vertical lift motors. The fixed-wing component provides the benefit of efficient forward flight, while the vertical lift capability enables operations in confined spaces without the need for runways. This configuration is well-suited for long-range missions that require both hovering and high-speed flight [16].
Multi-rotor VTOL UAVs represent another major category, characterised by multiple rotors providing vertical lift and control. These designs, which include quadcopters, hexacopters, and octocopters, are known for their exceptional manoeuvrability and hovering stability. Multi-rotor UAVs are particularly useful for applications requiring precise positioning, such as aerial photography, inspection, and surveillance. However, they typically have lower forward speeds and shorter flight durations compared to fixed-wing aircraft [17,18].
Tilt-rotor and tilt-wing VTOL UAVs are hybrid configurations that combine aspects of both fixed-wing and multi- rotor aircraft. Tilt-rotor designs feature rotors that can pivot from a vertical orientation for take-off and landing to a horizontal orientation for forward flight, allowing them to achieve both vertical lift and efficient cruise speeds [19]. Tilt-wing designs operate similarly, with the entire wing structure tilting to change the direction of thrust. These designs are particularly suited for medium to long-range missions that require both efficient horizontal flight and the flexibility of VTOL operations [18].
Blended-wing-body (BWB) VTOL UAVs represent an advanced configuration in which the wing and fuselage are integrated into a single aerodynamic structure. BWB designs can incorporate a variety of VTOL mechanisms, including ducted fans or tilting rotors to achieve vertical lift. The BWB configuration offers aerodynamic advantages, such as reduced drag and increased lift, while also providing a larger internal volume for payload and equipment [20].
Hybrid VTOL UAVs are designed to combine the best features of various configurations to overcome the limitations of single designs. These designs often integrate fixed wings with vertical rotors or tilting mechanisms to achieve a balance between speed, endurance, and manoeuvrability. The goal of hybrid designs is to enable VTOL capabilities without compromising the performance of long-range and high-speed flights. Some hybrid designs also include convertible VTOLs, which can change their configuration in flight, such as by folding or rotating wings [21].
3. Design Methodologies and Aerodynamic Considerations
The design of VTOL UAVs requires a multidisciplinary approach, integrating mission requirements, aerodynamic principles, and structural considerations as depicted in Figure 4. The methodologies employed aim to create a functional, efficient, and safe aircraft capable of performing diverse tasks in various environments. A crucial first step in the design process involves a clear understanding of the mission profile, which dictates the necessary performance characteristics, including range, payload, endurance, and operational environment. This understanding informs all subsequent design decisions, from the selection of materials and components to the optimization of the aerodynamic configuration [22]. A core element of the design methodology is thrust performance analysis, which is vital to ensure the UAV can meet the demands of both vertical and horizontal flight. This analysis includes calculating the thrust required for take-off, hovering, and cruising, and comparing it to the thrust produced by the selected motors and propellers. The choice of motors and propellers is critical, with brushless DC motors often preferred for their efficiency and longevity [23]. Propeller selection is closely linked with motor specifications, and thrust calculations must consider both multi-rotor and fixed-wing modes, taking into account factors like take-off speed and energy consumption. In addition, it is important to consider the effect of increased wing loading due to the addition of new equipment [24].
Maintaining stability is a key factor in the design of VTOL UAVs. To achieve stability, the position of components is carefully arranged to ensure that the centre of gravity does not shift from the original design, especially when modifying ready-to-fly (RTF) fixed-wing UAVs. For multi-rotor configurations, the placement of motors is made symmetrical along the x and y axes to prevent any moments during hovering or take-off [2,24].
Aerodynamic considerations play a critical role in the design of VTOL UAVs. This involves the analysis of lift, drag, and stability throughout the flight envelope, encompassing hover, transition, and forward flight. Wing design is crucial, with parameters such as aspect ratio, wing sweep, and taper ratio needing to be optimised for lift and drag. The selection of aerofoil profiles is also very important as it influences the lift and drag characteristics, and the performance at different speeds.[25] Drag calculations are essential, particularly when incorporating multi-rotor systems, as these can significantly increase drag in forward flight. Computational Fluid Dynamics (CFD) is often used to analyse aerodynamic performance, and to optimise wingtips, as well as to predict the pressure distribution and flow fields around the vehicle [26,27].
As demonstrated in Figure 5, the transition between vertical and horizontal flight modes is a challenging part of the design and control of VTOL UAVs. During transition, the control system must smoothly shift between rotor and wing-based lift and control, without losing altitude or causing instability. Various control strategies are used, including PID control, and neural network-based nonlinear PID control [28].
Structural analysis is another critical aspect of VTOL UAV design. It involves the selection of suitable materials to minimize weight while ensuring the airframe can withstand the stress of flight. Lightweight materials are favoured to reduce the overall weight of the UAV, and enhance its performance [29,30]. The design of the fuselage, wings and tail needs to consider structural integrity and aerodynamic efficiency, with careful consideration for component placement to minimize drag and maintain the centre of gravity. Material selection for the motors, batteries, and other components should also consider factors such as heat, and waterproof capability[31,32]. The impact of wing loading on performance is also an important design consideration. Increased wing loading can negatively impact thrust performance; therefore it is essential to analyse the relationship between wing loading and thrust in both multi-rotor and fixed-wing modes [33]. The key design considerations, methods, and tools for VTOL UAVs are illustrated in Table 2.
4. Propulsion Systems and Energy Management
The propulsion systems of VTOL UAVs are a critical aspect of their design, directly influencing their performance, efficiency, and operational capabilities. These systems are responsible for providing the necessary thrust for both vertical and horizontal flight, and the selection of appropriate technology is vital to meet mission requirements [35]. The main propulsion systems, energy management, and related technologies used in VTOL UAVs are shown in Table 3.
Electric propulsion systems are widely favoured in VTOL UAVs due to their efficiency, reduced noise, and low- carbon emissions. These systems typically use brushless DC motors that offer a good balance between power, efficiency, and lifespan. Electric propulsion can be implemented in various configurations, such as:
- Multi-rotor systems, where multiple rotors provide vertical lift and control.
- Lift + Cruise configurations, which use separate motors for vertical lift and forward cruise.
- Tilt-rotor and tilt-wing designs, where rotors or wings tilt to transition between vertical and horizontal flight.
The choice of motor configuration significantly impacts the complexity, efficiency, and performance of the VTOL UAV. For example, while multi-rotor systems offer excellent manoeuvrability and hovering capabilities, they may be less efficient for longer-range horizontal flight [39]. Tilt-rotor and tilt-wing configurations provide a blend of vertical and horizontal flight capabilities but introduce mechanical complexity. The selection of motors must also consider factors such as RPM vs. supply voltage, durability, and thermal management. Overheating can damage motor components, making appropriate thermal design essential [40].
Gas-driven fan propulsion is another technology employed in some VTOL designs. These systems can provide a wide range of loads for low-speed operations. However, electric propulsion is becoming increasingly popular as it offers a cleaner, more efficient alternative. Hybrid-electric systems that integrate conventional turbo engines in the propulsion system are also being explored [41,42].
Energy management is a critical aspect of VTOL UAVs design, particularly for electric propulsion systems. Battery technology is central to the performance and endurance of electric VTOL UAVs. Lithium-ion and Lithium-Polymer (Li-Po) batteries are commonly used due to their high energy density, which is the amount of energy that can be stored in a given volume or weight [43]. However, there is a need to enhance battery performance further, with research focusing on increasing energy density, power density, portability, and safety. Key strategies for improving battery performance include:
- Improving battery materials and structures.
- Integrating batteries with the airframe to increase energy density.
- Designing sophisticated Battery Management Systems (BMS) to maintain stable operation.
- Developing advanced thermal management systems to ensure batteries operate within an ideal temperature range.[44]
- Exploring alternative technologies such as hydrogen fuel cells.
As demonstrated in Figure 6, energy consumption varies across different flight modes, with vertical take-off and hovering generally requiring more power than horizontal flight. It is vital to balance the power needs for both vertical and horizontal flight to maximize endurance. The transition between hover and cruise flight is a particularly energy-intensive phase. Efficient energy management involves not only selecting the right battery technology but also optimizing the design and operation of the propulsion system to minimize losses and maximize flight time. Furthermore, the efficiency of components like Electronic Speed Controllers (ESCs) is a key factor in the effective use of battery power [45,46]. A comparison between the propulsion systems in terms of Energy efficiency, payload capacity, and range ability is illustrated in Figure 7.
5. Flight Control Systems and Avionics
The flight control systems and avionics of VTOL UAVs are essential for ensuring safe, stable, and efficient operation. These systems manage the aircraft’s movement, stability, and navigation, and they integrate various technologies to enable autonomous and remote-controlled flight [2,47,48]. The general configuration for the main components of the VTOL UAV control loop is shown in Figure 8.
Flight control systems for VTOL UAVs are complex, often employing a combination of linear and non-linear control models. These models are based on the dynamic characteristics of the hybrid UAV, and they are crucial for managing the transition between vertical and horizontal flight modes. Control laws, which are the algorithms that dictate how the aircraft responds to inputs, are derived from these models. Linear control methods, such as Proportional Integral Derivative (PID) controllers, are widely used due to their simplicity, robustness, and ease of implementation. PID control is an error-based system that uses a control loop to process variables such as temperature, pressure and speed. PID controllers are also used to stabilize and optimise control of UAVs by balancing out disturbances and making necessary corrections [10]. A comparison between the flight control methods in terms of their performance, complexity, and suitability for different applications is demonstrated in Figure 9.
In practical applications, real-time adjustments of the control gains are often necessary to achieve the desired flight response. This tuning process can be done during flight tests, allowing for iterative improvements to the control system. The flight control system manages the redundant control surfaces, such as rotor speed, collective pitch, and wing control surfaces, in order to improve manoeuvrability [49,50]. Control allocation strategies are employed to determine the appropriate use of each control surface. More advanced control methods include Linear Quadratic Optimal (LQR) Controllers and robust controllers which can be used in applications requiring high accuracy and stability [51]. However, challenges exist in the accurate modelling of a VTOL’s flight dynamics due to the complexities of multi-rotor configurations, installation errors, non-perpendicular alignment of motors and vibrations [52].
Avionics are the electronic systems that enable the aircraft’s functions. As depicted and detailed in Figure 10 and Table 4 respectively, the Key avionics technologies include Communication, Navigation, Surveillance (CNS), Simplified Vehicle Operations (SVO), and Fly-By-Wire (FBW) systems. CNS systems are essential for maintaining safe operations within the urban air mobility environment [53]. These systems provide air traffic control with the aircraft’s position and status, and enable reliable communication between the aircraft and ground control. Navigation systems combine onboard instruments with external radio aids, allowing the aircraft to calculate its position. Surveillance systems provide real-time awareness of the aircraft’s surroundings, and collision avoidance capabilities [54,55,56].
Simplified Vehicle Operations (SVO) is an area of focus for VTOL development, where the goal is to reduce the complexity of flying these aircraft, making them accessible to a wider range of operators. This is achieved through automated flight systems, user-friendly interfaces and the implementation of Fly-By-Wire (FBW) systems. FBW systems replace mechanical control linkages with electronic signals, which enhances control precision and system reliability. The flight control computer (FCC) takes inputs from the pilot and uses them to control the aircraft’s surfaces [57,58].
As detailed in Figure 11, the transition between hover and forward flight is a critical aspect of VTOL UAV operation, with specific control requirements. During the transition, the aircraft must transfer lift from the rotors to the fixed-wing, and vice versa, and this needs to be managed by the automatic flight control system (AFCS). Automatic flight control is necessary for safe transition between the different flight modes. This requires real-time adjustment of motor outputs, and the use of feedback from sensors, such as altitude, airspeed and attitude to make adjustments. The AFCS regulates the speed of the rotors and the main engine to maintain a constant altitude during transition. The transition speed, from hover to forward flight, and from forward flight to hover is also a key consideration [59].
6. Applications of VTOL UAVs
The VTOL UAVs have emerged as a versatile technology with a wide array of applications across various sectors as depicted and illustrated in Figure 12 and Table 5 respectively. Their unique ability to take off and land vertically, combined with their capacity for hovering and efficient forward flight, makes them well-suited for diverse tasks in both urban and remote environments. The versatility of VTOL UAVs stems from their hybrid nature, combining the benefits of both fixed-wing and rotary-wing aircraft. This allows them to operate in areas without runways, while still achieving efficient cruising speeds and extended flight ranges [2,62].
One of the primary applications of VTOL UAVs is in surveillance and monitoring. Their hovering capability enables them to closely inspect areas of interest, making them ideal for tasks such as wildlife monitoring in both tropical and polar regions, oil pipeline monitoring, and infrastructure inspection. VTOL UAVs are also used in traffic monitoring, providing real-time data on traffic flow and congestion. The ability to operate in confined spaces and difficult terrains makes VTOL UAVs invaluable for these tasks [17,63].The use of VTOL UAVs can reduce the need for manned aircraft in dangerous or hard-to-reach areas, enhancing safety and efficiency. Furthermore, their smaller size and reduced noise signature compared to manned aircraft make them suitable for operations in urban areas [62,64]. In military operations, VTOL UAVs are used for intelligence, surveillance, and reconnaissance (ISR) missions [65]. Their ability to take off and land in difficult terrain, such as steep slopes and uneven surfaces, makes them highly adaptable in combat situations. They are also deployed for search and rescue operations, where their hovering capability enables them to closely inspect and assess the situation. VTOL UAVs can provide critical support in hostile environments, offering a safer alternative to manned aircraft. The combination of vertical take-off with the ability to transition to high-speed forward flight makes them extremely effective in dynamic operational environments [33,66]. VTOL UAVs are also making significant contributions in the civilian sector. In agriculture, they are used for crop monitoring and analysis, helping farmers to optimise their yields. The ability to carry payloads enables VTOL UAVs to transport goods, including medical supplies, in areas that are difficult to reach by conventional means. In construction, they are used for mapping and monitoring sites, ensuring progress is on schedule. Delivery services are another growing application, with companies exploring the use of VTOL UAVs to transport packages in urban areas [67].
Furthermore, VTOL UAVs are used in aerial photography and videography, providing high-quality images and videos for various purposes, including entertainment. In emergency response, they are invaluable for disaster relief, offering the ability to quickly assess damage and deliver aid. VTOL UAVs are also being developed for urban air mobility, with the potential to be used as air taxis in congested cities [68,69]. The development of VTOL UAVs is also driven by the need for vehicles that can operate efficiently in urban environments. The lack of runways in cities and other built-up areas makes VTOL capabilities essential for the integration of UAVs into urban transportation systems. The development of autonomous VTOL UAVs is crucial for the future expansion of urban air mobility [35].
7. Regulatory, Technological, and Societal Challenges in VTOL UAV Integration
The integration of VTOL UAVs into everyday life presents a complex set of regulatory and societal challenges as shown in Table 6 [11]. As these aircraft become more advanced and versatile, it is essential to address the necessary frameworks to ensure their safe and responsible operation [70,71].
One of the most significant challenges is the lack of comprehensive regulatory frameworks for VTOL aircraft. Unlike traditional aircraft, VTOLs do not neatly fit into existing categories, leading to the need for new certification standards. Regulatory bodies such as the Federal Aviation Administration (FAA) in the United States and the European Union Aviation Safety Agency (EASA) are actively working to develop specific airworthiness regulations for eVTOL (electric VTOL) aircraft. The FAA has introduced a “special class” process for powered-lift aircraft, including models like the Joby Aero JAS4-1 and Archer M001, while EASA is creating a distinct category for VTOL aircraft with the establishment of general special conditions (SC-VTOL-01) [72,73]. These efforts are a response to the need for customised regulations within the industry. However, many regulatory issues remain unresolved. These include the lack of clear guidelines for type certification, operations, airspace management, and infrastructure requirements. Current regulations do not offer complete guidance on product certification, operational procedures, responsibilities, safety measures, and security protocols. Bridging these gaps requires the development of formal regulations based on practical experience with special conditions. The complexity of aviation software and electronic hardware also needs to be addressed through development assurance, such as the Radio Technical Commission for Aeronautics (RTCA) DO-178C and DO-254 standards [70,72].
Another major challenge is the integration of autonomous technology in VTOL aircraft. As detailed in Figure 13, regulatory authorities are approaching fully autonomous VTOL aircraft cautiously, as it goes against the traditional requirement of having at least one crew member on board. Although automation is being integrated into general aviation, the concept of fully autonomous operations is not yet widely accepted. While the certification of drones with automatic technology is more tolerated, efforts are underway to explore single-pilot operations with virtual co- pilots. The implementation of autonomous VTOLs raises concerns regarding trustworthiness, certification complexity, interpretability limitations, and the constraints of machine learning and deep learning algorithms. Two distinct paths have emerged for achieving autonomy: the "piloted path," which involves a gradual transition from manned to fully autonomous flight, and the "pilotless path," which prioritizes autonomous flight from the outset. The piloted path is favoured by companies like Joby, Vertical and Lilium, while companies like Wisk and E-Hang are pursuing the pilotless path [72,74,75].
Societal acceptance is also crucial for the widespread adoption of VTOL aircraft. Public trust and acceptance depend on mitigating concerns about safety, noise, and privacy. There is currently a lack of public confidence in the reliability of autonomous technology, VTOL operations, and electric propulsion systems. Studies indicate that while potential users are interested in urban air mobility (UAM), they also have concerns about safety, security, noise pollution, and environmental impact. To encourage broad acceptance, the factors influencing customer experience need to be addressed. For example, noise pollution is a major concern that must be managed with effective cabin noise mitigation techniques in the aircraft’s design [12,72,76,77]. Integrating VTOL aircraft with existing transportation systems and reducing environmental disruptions are also critical. During the design phase, safety perception, vehicle motion, noise and vibration levels, environmental effects, and passenger comfort must be prioritised. Transparency about the reliability of VTOL technologies and engaging with the community through educational initiatives can enhance public understanding and acceptance [78,79].
8. Future Trends and Research Directions
The field of VTOL UAVs is rapidly evolving, with several key trends and research directions shaping its future. These advancements are driven by the need for more efficient, safe, and versatile aircraft that can operate seamlessly within urban environments and beyond [80]. A summary of the main future trends and research directions for VTOL UAVs is shown in Table 7.
One of the most significant trends is the push towards full autonomy. As VTOL technology advances, the ability for these aircraft to operate without direct human control is becoming increasingly important. This involves developing sophisticated flight control systems, enhanced sensing and perception capabilities, and robust decision-making algorithms. The integration of machine learning and artificial intelligence (AI) is crucial for enabling autonomous navigation, collision avoidance, and adaptive flight control. Research is focused on creating systems that can handle unexpected events, such as sensor malfunctions or interactions with non-cooperative entities.[81] While achieving full autonomy presents challenges, it also promises to increase operational efficiency, reduce human error, and expand the range of potential applications for VTOL aircraft. The development of Simplified Vehicle Operations (SVO) is also a critical area, with the goal of enabling operation by a broader range of users through automated systems and user-friendly interfaces [82].
Another key area of focus is the integration of VTOLs into existing air traffic management (ATM) systems. As the number of VTOL aircraft in operation increases, it is essential to develop automated routing systems that can adapt to changing weather conditions and traffic patterns. This involves the creation of advanced communication systems that allow for smooth coordination between VTOLs, other aircraft, ATM systems, and ground controllers. The establishment of unmanned traffic management (UTM) systems is also necessary to track and manage all airborne vehicles within the airspace. These systems must ensure safe and efficient integration of autonomous VTOLs into the aviation ecosystem. Future ATM will require real-time tracking and surveillance of all aerial vehicles, including VTOLs, and the establishment of rules and standards for their operation [83,84].
The development of urban infrastructure to support VTOL operations is another critical trend. This includes the creation of designated landing and take-off zones, known as vertiports, in urban areas. These vertiports can be located on rooftops, in underutilised parking lots, or on elevated platforms above busy streets. Integrating VTOL operations into the urban fabric will require the formulation of novel regulatory frameworks and the deployment of specialised air traffic control systems to manage the traffic and navigation of VTOL aircraft around other aerial vehicles, buildings and obstacles [85]. The integration of VTOL aircraft into public transportation networks can also improve commuting efficiency. VTOLs can also be deployed for emergency medical services and disaster relief [84,86].
Human-machine interaction (HMI) is also an area of significant development. The use of voice and gesture recognition will allow for more intuitive ways for passengers and pilots to communicate with VTOLs. Augmented and virtual reality (AR/VR) interfaces are also being developed to provide real-time information, such as flight data, weather updates, and traffic alerts. These technologies can enhance situational awareness for pilots and provide passengers with a more engaging and interactive flight experience. The development of HMI is critical to ensuring that both piloted and autonomous VTOL aircraft are easy to operate and provide a positive user experience [87].
Research and development efforts are also concentrated on improving the technical aspects of VTOL aircraft. This includes enhancing energy efficiency through advancements in electric propulsion systems, battery technology, and lightweight materials. Electric propulsion is a major focus, with ongoing research into lithium-ion batteries and new types of motor materials. Improving the power density, torque density, efficiency, and reliability of propulsion motors is also critical. Additionally, research is needed to refine aerodynamic designs to improve lift, reduce drag, and enhance the overall stability of VTOL aircraft [88].
9. Conclusion
The review of VTOL UAVs reveals their transformative potential across sectors, whilst acknowledging significant developmental hurdles. VTOL technology uniquely blends multirotor hovering with fixed-wing speed and range, making them versatile for diverse environments like urban areas and remote locations. Key challenges in VTOL UAV development include: the complex design and control of hybrid systems, managing transitions between flight modes, and maintaining stability; developing reliable and efficient electric propulsion and high-density batteries for longer, greener operations; integrating VTOLs into air traffic management (ATM) systems, requiring robust communication, navigation, and unmanned traffic management (UTM); creating necessary urban infrastructure, such as landing zones and charging stations; developing advanced autonomous systems with multiple sensors, machine learning, and artificial intelligence (AI) for complex, dynamic settings; and establishing a clear regulatory framework for certification, operations and airspace management while addressing public concerns.
Overcoming these challenges requires a multidisciplinary effort from researchers, engineers, policymakers, and industry stakeholders. The development of fault-tolerant control systems, advanced sensors, data processing, and clear regulatory standards are crucial for advancing the field. In conclusion, VTOL UAV technology offers great potential, but successful integration necessitates tackling these challenges via multidisciplinary research, robust regulations, and innovative technology.
Declaration of competing interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Compliance with Ethics Requirements
No dataset was used or generated in this study. All analyses and findings are based on simulation results. The parameters used in this study are available in the main text of the manuscript.
References
- Valavanis, K.P.; Vachtsevanos, G.J. , Handbook of unmanned aerial vehicles, Springer Publishing Company, Incorporated, 2014.
- Misra, A.; Jayachandran, S.; Kenche, S.; Katoch, A.; Suresh, A.; Gundabattini, E.; Selvaraj, S.K.; Legesse, A.A. A Review on Vertical Take-Off and Landing (VTOL) Tilt-Rotor and Tilt Wing Unmanned Aerial Vehicles (UAVs). J. Eng. 2022, 2022, 1–27. [Google Scholar] [CrossRef]
- Alqudsi, Y.; Makaraci, M.; Kassem, A.; El-Bayoumi, G. A numerically-stable trajectory generation and optimization algorithm for autonomous quadrotor UAVs. Robot. Auton. Syst. 2023, 170. [Google Scholar] [CrossRef]
- Zhou, Y.; Zhao, H.; Liu, Y. An evaluative review of the VTOL technologies for unmanned and manned aerial vehicles. Comput. Commun. 2020, 149, 356–369. [Google Scholar] [CrossRef]
- Alqudsi, Y. , Synchronous task allocation and trajectory optimization for autonomous drone swarm, in: 2024 1st International Conference on Emerging Technologies for Dependable Internet of Things (ICETI), IEEE, 2024, pp. 1–8.
- Alqudsi, Y.; Makaraci, M. Exploring advancements and emerging trends in robotic swarm coordination and control of swarm flying robots: A review. Proc. Inst. Mech. Eng. Part C: J. Mech. Eng. Sci. 2024, 239, 180–204. [Google Scholar] [CrossRef]
- Bandivadekar, D.; Minisci, E. Modelling and Simulation of Transpiration Cooling Systems for Atmospheric Re-Entry. Aerospace 2020, 7, 89. [Google Scholar] [CrossRef]
- Zhou, M.; Zhou, Z.; Liu, L.; Huang, J.; Lv, Z. Review of vertical take-off and landing fixed-wing UAV and its application prospect in precision agriculture. Int. J. Precis. Agric. Aviat. 2018, 1, 8–17. [Google Scholar] [CrossRef]
- Moradi, N.; Wang, C.; Mafakheri, F. Urban Air Mobility for Last-Mile Transportation: A Review. Vehicles 2024, 6, 1383–1414. [Google Scholar] [CrossRef]
- Ducard, G.J.; Allenspach, M. , Review of designs and flight control techniques of hybrid and convertible vtol uavs, Aerospace Science and Technology 2021, 118, 107035.
- Alqudsi, Y.; Makaraci, M. UAV swarms: research, challenges, and future directions. J. Eng. Appl. Sci. 2025, 72, 1–24. [Google Scholar] [CrossRef]
- EASA, N. , Study on the societal acceptance of urban air mobility in europe, 2021.
- Alqudsi, Y.S.; Kassem, A.H.; El-Bayoumi, G.M. , Trajectory generation and optimization algorithm for autonomous aerial robots, in: 2021 1st International Conference on Emerging Smart Technologies and Applications (eSmarTA), IEEE, 2021, pp. 1–8.
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.; Dou, Z.; Almaita, E.; Khalil, I.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned Aerial Vehicles (UAVs): A Survey on Civil Applications and Key Research Challenges. IEEE Access 2019, 7, 48572–48634. [Google Scholar] [CrossRef]
- Aboelezz, A.; Elqudsi, Y.; Hassanalian, M.; Desoki, A. Wind tunnel calibration, corrections and experimental validation for fixed-wing micro air vehicles measurements. Aviation 2019, 23, 104–113. [Google Scholar] [CrossRef]
- Mu, S.; Zhou, P.; Duan, D.; Tang, J. Formation control of a second-order UAVs system under switching topology with obstacle/collision avoidance. Aerosp. Syst. 2020, 3, 219–227. [Google Scholar] [CrossRef]
- Nonami, K.; Kendoul, F.; Suzuki, S.; Wang, W.; Nakazawa, D. , Autonomous flying robots: unmanned aerial vehicles and micro aerial vehicles, Springer Science & Business Media, 2010.
- Floreano, D.; Wood, R.J. Science, technology and the future of small autonomous drones. Nature 2015, 521, 460–466. [Google Scholar] [CrossRef]
- Kendoul, F. Survey of advances in guidance, navigation, and control of unmanned rotorcraft systems. J. Field Robot. 2012, 29, 315–378. [Google Scholar] [CrossRef]
- Liebeck, R.H. Design of the Blended Wing Body Subsonic Transport. J. Aircr. 2004, 41, 10–25. [Google Scholar] [CrossRef]
- Saeed, A.S.; Younes, A.B.; Islam, S.; Dias, J.; Seneviratne, L.; Cai, G. , A review on the platform design, dynamic modeling and control of hybrid uavs, in: 2015 International Conference on Unmanned Aircraft Systems (ICUAS), IEEE, 2015, pp. 806–815.
- Pollet, F.; Delbecq, S.; Budinger, M.; Moschetta, J.-M.; Liscouët, J. , A common framework for the design optimization of fixed-wing, multicopter and vtol uav configurations, in: 33rd Congress of the International Council of the Aeronautical Sciences, 2022.
- Leishman, G.J. , Principles of helicopter aerodynamics with CD extra, Cambridge university press, 2006.
- Takahashi, T.; Fukudome, K.; Mamori, H.; Fukushima, N.; Yamamoto, M. Effect of Characteristic Phenomena and Temperature on Super-Cooled Large Droplet Icing on NACA0012 Airfoil and Axial Fan Blade. Aerospace 2020, 7, 92. [Google Scholar] [CrossRef]
- Cakir, H.; Kurtuluş, D.F. , Design and aerodynamic analysis of a vtol tilt-wing uav, Turkish Journal of Electrical Engineering and Computer Sciences 2022, 30, 767–784.
- Abdelrahman, A.M.K.M. , Conceptual design framework for transitional vtol aircraft with application to highly-maneuverable uavs (2019).
- Nakka, S.K.S.; Alexander-Ramos, M.J. Simultaneous Combined Optimal Design and Control Formulation for Aircraft Hybrid-Electric Propulsion Systems. J. Aircr. 2021, 58, 53–62. [Google Scholar] [CrossRef]
- P. Ventura Diaz, S. Yoon, High-fidelity computational aerodynamics of multi-rotor unmanned aerial vehicles, in: 2018 AIAA Aerospace Sciences Meeting, 2018, p. 1266.
- Hua, M.-D.; Hamel, T.; Morin, P.; Samson, C. A Control Approach for Thrust-Propelled Underactuated Vehicles and its Application to VTOL Drones. IEEE Trans. Autom. Control. 2009, 54, 1837–1853. [Google Scholar] [CrossRef]
- Ghamari, M.; Rangel, P.; Mehrubeoglu, M.; Tewolde, G.S.; Sherratt, R.S. Unmanned Aerial Vehicle Communications for Civil Applications: A Review. IEEE Access 2022, 10, 102492–102531. [Google Scholar] [CrossRef]
- Bappy, A.; Asfak-Ur-Rafi, M.; Islam, M.S.; Sajjad, A.; Imran, K.N. , Design and development of unmanned aerial vehicle (Drone) for civil applications, Ph.D. thesis, BRAC University, 2015.
- Kenway, G.K.; Mader, C.A.; He, P.; Martins, J.R. Effective adjoint approaches for computational fluid dynamics. Prog. Aerosp. Sci. 2019, 110, 100542. [Google Scholar] [CrossRef]
- Palaia, G.; Vittorio, C.; Vincenzo, B.; Emanuele, R. , Preliminary design and testing of a vtol light uav based on a box-wing configuration, Aircraft Eng. Aerospace Tech 2019, 92, 737–742. [Google Scholar]
- Alqudsi, Y.S.; Kassem, A.H.; El-Bayoumi, G. A general real-time optimization framework for polynomial-based trajectory planning of autonomous flying robots. Proc. Inst. Mech. Eng. Part G: J. Aerosp. Eng. 2023, 237, 29–41. [Google Scholar] [CrossRef]
- Viviani, A.; Iuspa, L.; Aprovitola, A. An optimization-based procedure for self-generation of Re-entry Vehicles shape. Aerosp. Sci. Technol. 2017, 68, 123–134. [Google Scholar] [CrossRef]
- Tahir, N.M.; Alhaji, A.U.; Abdullahi, I.; Tahşr, N.; Alhaji, A.; Abdullahi, I. Performance evaluation of unmanned aerial vehicle wing made from sterculiasetigeradelile fiber and pterocarpuserinaceus wood dust epoxy composite using finite element method abaqus and structural testing. Res. Eng. Struct. Mater. 2022, 8, 675–694. [Google Scholar] [CrossRef]
- Zong, J.; Zhu, B.; Hou, Z.; Yang, X.; Zhai, J. Evaluation and Comparison of Hybrid Wing VTOL UAV with Four Different Electric Propulsion Systems. Aerospace 2021, 8, 256. [Google Scholar] [CrossRef]
- Finger, D.; Braun, C.; Bil, C. , The impact of electric propulsion on the performance of vtol uavs, 66. Deutscher Luft-Und Raumfahrtkongress DLRK 2017, 2017.
- An, B.; Sun, M.; Wang, Z.; Chen, J. Flame stabilization enhancement in a strut-based supersonic combustor by shock wave generators. Aerosp. Sci. Technol. 2020, 104. [Google Scholar] [CrossRef]
- Zong, J.; Zhu, B.; Hou, Z.; Yang, X.; Zhai, J. Evaluation and Comparison of Hybrid Wing VTOL UAV with Four Different Electric Propulsion Systems. Aerospace 2021, 8, 256. [Google Scholar] [CrossRef]
- Pan, Z.; Wu, Z.; Xiong, J. Localized temperature rise as a novel indication in damage and failure behavior of biaxial non-crimp fabric reinforced polymer composite subjected to impulsive compression. Aerosp. Sci. Technol. 2020, 103. [Google Scholar] [CrossRef]
- T. VanderMey, J. VanderMey, Vertical take-off and landing (vtol) aircraft with distributed thrust and control, 2007. US Patent 7,159,817.
- Coutinho, M.; Bento, D.; Souza, A.; Cruz, R.; Afonso, F.; Lau, F.; Suleman, A.; Barbosa, F.R.; Gandolfi, R.; Junior, W.A. , et al. A review on the recent developments in thermal management systems for hybrid-electric aircraft. Appl. Therm. Eng. [CrossRef]
- Tanaka, T.; Ebinuma, T.; Nakasuka, S. ; Correction: Tanaka, et al. dual-satellite lunar global navigation system using multi-epoch double- differenced pseudorange observations. aerospace 2020, 7, 122, Aerospace 2020, 8, 8. [Google Scholar]
- Jiao, S.; Zhang, G.; Zhou, M.; Li, G. A Comprehensive Review of Research Hotspots on Battery Management Systems for UAVs. IEEE Access 2023, 11, 84636–84650. [Google Scholar] [CrossRef]
- Li, Y.; Liu, M. Path Planning of Electric VTOL UAV Considering Minimum Energy Consumption in Urban Areas. Sustainability 2022, 14, 13421. [Google Scholar] [CrossRef]
- Xu, L.; Huangfu, Y.; Ma, R.; Xie, R.; Song, Z.; Zhao, D.; Yang, Y.; Wang, Y.; Xu, L. A Comprehensive Review on Fuel Cell UAV Key Technologies: Propulsion System, Management Strategy, and Design Procedure. IEEE Trans. Transp. Electrification 2022, 8, 4118–4139. [Google Scholar] [CrossRef]
- Alqudsi, Y.; Makaraci, M. , Swarm robotics for autonomous aerial robots: Features, algorithms, control techniques, and challenges, in: 2024 4th International Conference on Emerging Smart Technologies and Applications (eSmarTA), IEEE, 2024, pp. 1–9.
- Su, S.; Yu, P.; Wang, H.; Shan, X. Design and Optimization of a Piecewise Flight Controller for VTOL UAVs. J. Aircr. 2024, 1–11. [Google Scholar] [CrossRef]
- Crespo, L.; Matsutani, M.; Annaswamy, A. , Verification and tuning of an adaptive controller for an unmanned air vehicle, in: AIAA Guidance, Navigation, and Control Conference, 2010, p. 8403.
- Alqudsi, Y.S.; Saleh, R.A.A.; Makaraci, M.; Ertunç, H.M. Enhancing aerial robots performance through robust hybrid control and metaheuristic optimization of controller parameters. Neural Comput. Appl. 2024, 36, 413–424. [Google Scholar] [CrossRef]
- Vachtsevanos, G.; Tang, L.; Drozeski, G.; Gutierrez, L. From mission planning to flight control of unmanned aerial vehicles: Strategies and implementation tools. Annu. Rev. Control. 2005, 29, 101–115. [Google Scholar] [CrossRef]
- Saleem, O.; Kazim, M.; Iqbal, J. Robust Position Control of VTOL UAVs Using a Linear Quadratic Rate-Varying Integral Tracker: Design and Validation. Drones 2025, 9, 73. [Google Scholar] [CrossRef]
- Alqudsi, Y. , Analysis and implementation of motion planning algorithms for real-time navigation of aerial robots in dynamic environments, in: 2024 4th International Conference on Emerging Smart Technologies and Applications (eSmarTA), IEEE, 2024, pp. 1–10.
- Zhou, Q.; Tan, F. Avionics of Electric Vertical Take-off and Landing in the Urban Air Mobility: A Review. IEEE Aerosp. Electron. Syst. Mag. 2024. [CrossRef]
- Alqudsi, Y. , Coordinated formation control for swarm flying robots, in: 2024 1st International Conference on Emerging Technologies for Dependable Internet of Things (ICETI), IEEE, 2024, pp. 1–8.
- Ramasamy, S.; Sabatini, R. ; Communication, navigation and surveillance performance criteria for safety-critical avionic systems, Technical Report, SAE Technical Paper, 2015.
- Chakraborty, I.; Comer, A.M.; Bhandari, R.; Mishra, A.A.; Schaller, R.; Sizoo, D.; McGuire, R. , Flight simulation based assessment of simplified vehicle operations for urban air mobility, in: AIAA SCITECH 2023 Forum, 2023, p. 0400.
- Chakraborty, I.; Comer, A.; Bhandari, R.; Putra, S.H.; Mishra, A.A.; Schaller, R.; Sizoo, D.; McGuire, R. Piloted Simulation-Based Assessment of Simplified Vehicle Operations for Urban Air Mobility. J. Aerosp. Inf. Syst. 2024, 21, 392–421. [Google Scholar] [CrossRef]
- Alqudsi, Y. , Advanced control techniques for high maneuverability trajectory tracking in autonomous aerial robots, in: 2024 1st International Conference on Emerging Technologies for Dependable Internet of Things (ICETI), IEEE, 2024, pp. 1–8.
- Alqudsi, Y.; Bolat, F.C.; Makaraci, M. Optimal and robust control methodologies for 4DOF active suspension systems: A comparative study with uncertainty considerations. Optim. Control. Appl. Methods 2024, 46, 3–27. [Google Scholar] [CrossRef]
- Zaludin, Z.; Gires, E. , Automatic flight control requirements for transition flight phases when converting long endurance fixed wing uav to vtol aircraft, in: 2019 IEEE international conference on automatic control and intelligent Systems (I2CACIS), IEEE, 2019, pp. 273–278.
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.; Dou, Z.; Almaita, E.; Khalil, I.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned Aerial Vehicles (UAVs): A Survey on Civil Applications and Key Research Challenges. IEEE Access 2019, 7, 48572–48634. [Google Scholar] [CrossRef]
- Sonkar, S.; Kumar, P.; Philip, D.; Ghosh, A. , Low-cost smart surveillance and reconnaissance using vtol fixed wing uav, in: 2020 IEEE Aerospace conference, IEEE, 2020, pp. 1–7.
- Alqudsi, Y.S.; Alsharafi, A.S.; Mohamed, A. , A review of airborne landmine detection technologies: Unmanned aerial vehicle-based approach, in: 2021 International congress of advanced technology and engineering (ICOTEN), IEEE, 2021, pp. 1–5.
- Woodbridge, E.; Connor, D.T.; Verbelen, Y.; Hine, D.; Richardson, T.; Scott, T.B. Airborne gamma-ray mapping using fixed-wing vertical take-off and landing (VTOL) uncrewed aerial vehicles. Front. Robot. AI 2023, 10, 1137763. [Google Scholar] [CrossRef]
- Watts, A.C.; Ambrosia, V.G.; Hinkley, E.A. Unmanned Aircraft Systems in Remote Sensing and Scientific Research: Classification and Considerations of Use. Remote Sens. 2012, 4, 1671–1692. [Google Scholar] [CrossRef]
- Aggarwal, S.; Nigam, K.; Singh, V.; Mishra, T.; Pandey, A.K.; Kant, R.; Murhekar, M. Drone-based medical delivery in the extreme conditions of Himalayan region: a feasibility study. BMJ Public Heal. 2024, 2, e000894. [Google Scholar] [CrossRef]
- Puri, A.; Valavanis, K.; Kontitsis, M. , Statistical profile generation for traffic monitoring using real-time uav based video data, in: 2007 Mediterranean Conference on Control & Automation, IEEE, 2007, pp. 1–6.
- Ahmed, S.S.; Fountas, G.; Lurkin, V.; Anastasopoulos, P.C.; Zhang, Y.; Bierlaire, M.; Mannering, F. The State of Urban Air Mobility Research: An Assessment of Challenges and Opportunities. IEEE Trans. Intell. Transp. Syst. 2024, 26, 1375–1394. [Google Scholar] [CrossRef]
- Finn, R.L.; Wright, D. ; Unmanned aircraft systems: Surveillance, ethics and privacy in civil applications, Computer Law & Security Review 2012, 28, 184–194.
- Hatfield, M.; Cahill, C.; Webley, P.; Garron, J.; Beltran, R. Integration of Unmanned Aircraft Systems into the National Airspace System-Efforts by the University of Alaska to Support the FAA/NASA UAS Traffic Management Program. Remote. Sens. 2020, 12, 3112. [Google Scholar] [CrossRef]
- Cohen, A.P.; Shaheen, S.A.; Farrar, E.M. Urban Air Mobility: History, Ecosystem, Market Potential, and Challenges. IEEE Trans. Intell. Transp. Syst. 2021, 22, 6074–6087. [Google Scholar] [CrossRef]
- Straubinger, A.; Rothfeld, R.; Shamiyeh, M.; Büchter, K.-D.; Kaiser, J.; Plötner, K.O. An overview of current research and developments in urban air mobility – Setting the scene for UAM introduction. J. Air Transp. Manag. 2020, 87. [Google Scholar] [CrossRef]
- Takacs, A.; Haidegger, T. Infrastructural Requirements and Regulatory Challenges of a Sustainable Urban Air Mobility Ecosystem. Buildings 2022, 12, 747. [Google Scholar] [CrossRef]
- Cummings, M.L.; Bruni, S. ; Collaborative human–automation decision making, Springer handbook of automation (2009) 437–447.
- Yedavalli, P.; Mooberry, J. , An assessment of public perception of urban air mobility (uam), Airbus UTM: Defining Future Skies (2019) 2046738072–1580045281.
- Park, G.; Park, H.; Park, H.; Chun, N.; Kim, S.-H.; Lee, K. , Public perception of uam: Are we ready for the new mobility that we have dreamed of?, in: Proceedings of the Human Factors and Ergonomics Society Annual Meeting, volume 66, SAGE Publications Sage CA: Los Angeles, CA, 2022, pp. 40–44.
- Bridgelall, R. Aircraft Innovation Trends Enabling Advanced Air Mobility. Inventions 2024, 9, 84. [Google Scholar] [CrossRef]
- Rothfeld, R.; Balac, M.; Ploetner, K.O.; Antoniou, C. , Initial analysis of urban air mobility’s transport performance in sioux falls, in: 2018 Aviation Technology, Integration, and Operations Conference, 2018, p. 2886.
- Abdelmaksoud, S.I.; Mailah, M.; Abdallah, A.M. Control Strategies and Novel Techniques for Autonomous Rotorcraft Unmanned Aerial Vehicles: A Review. IEEE Access 2020, 8, 195142–195169. [Google Scholar] [CrossRef]
- Xiang, S.; Xie, A.; Ye, M.; Yan, X.; Han, X.; Niu, H.; Li, Q.; Huang, H. Autonomous eVTOL: A summary of researches and challenges. Green Energy Intell. Transp. 2023, 3. [Google Scholar] [CrossRef]
- Schuchardt, B.I.; Geister, D.; Lüken, T.; Knabe, F.; Metz, I.C.; Peinecke, N.; Schweiger, K. Air Traffic Management as a Vital Part of Urban Air Mobility—A Review of DLR’s Research Work from 1995 to 2022. Aerospace 2023, 10, 81. [Google Scholar] [CrossRef]
- Pak, H.; Asmer, L.; Kokus, P.; Schuchardt, B.I.; End, A.; Meller, F.; Schweiger, K.; Torens, C.; Barzantny, C.; Becker, D.; et al. Can Urban Air Mobility become reality? Opportunities and challenges of UAM as innovative mode of transport and DLR contribution to ongoing research. CEAS Aeronaut. J. 2024, 1–31. [Google Scholar] [CrossRef]
- Alqudsi, Y. Integrated Optimization of Simultaneous Target Assignment and Path Planning for Aerial Robot Swarm. J. Supercomput. 2024, 81, 1–24. [Google Scholar] [CrossRef]
- Vascik, P.D.; Hansman, R.J. , Scaling constraints for urban air mobility operations: Air traffic control, ground infrastructure, and noise, in: 2018 aviation technology, integration, and operations conference, 2018, p. 3849.
- Jenab, K.; Moslehpour, S.; Khoury, S.; Virtual maintenance; reality; systems: A review, International Journal of Electrical and Computer Engineering 2016, 6, 2698.
- Johnson, W.; Silva, C.; Solis, E. , Concept vehicles for vtol air taxi operations, in: AHS Specialists”Conference on Aeromechanics Design for Transformative Vertical Flight, ARC-E-DAA-TN50731, 2018.
Figure 1.
This figure outlines the VTOL technology roadmap, showcasing key milestones in propulsion, autonomy, and infrastructure from early prototypes to future autonomous operations.
Figure 1.
This figure outlines the VTOL technology roadmap, showcasing key milestones in propulsion, autonomy, and infrastructure from early prototypes to future autonomous operations.
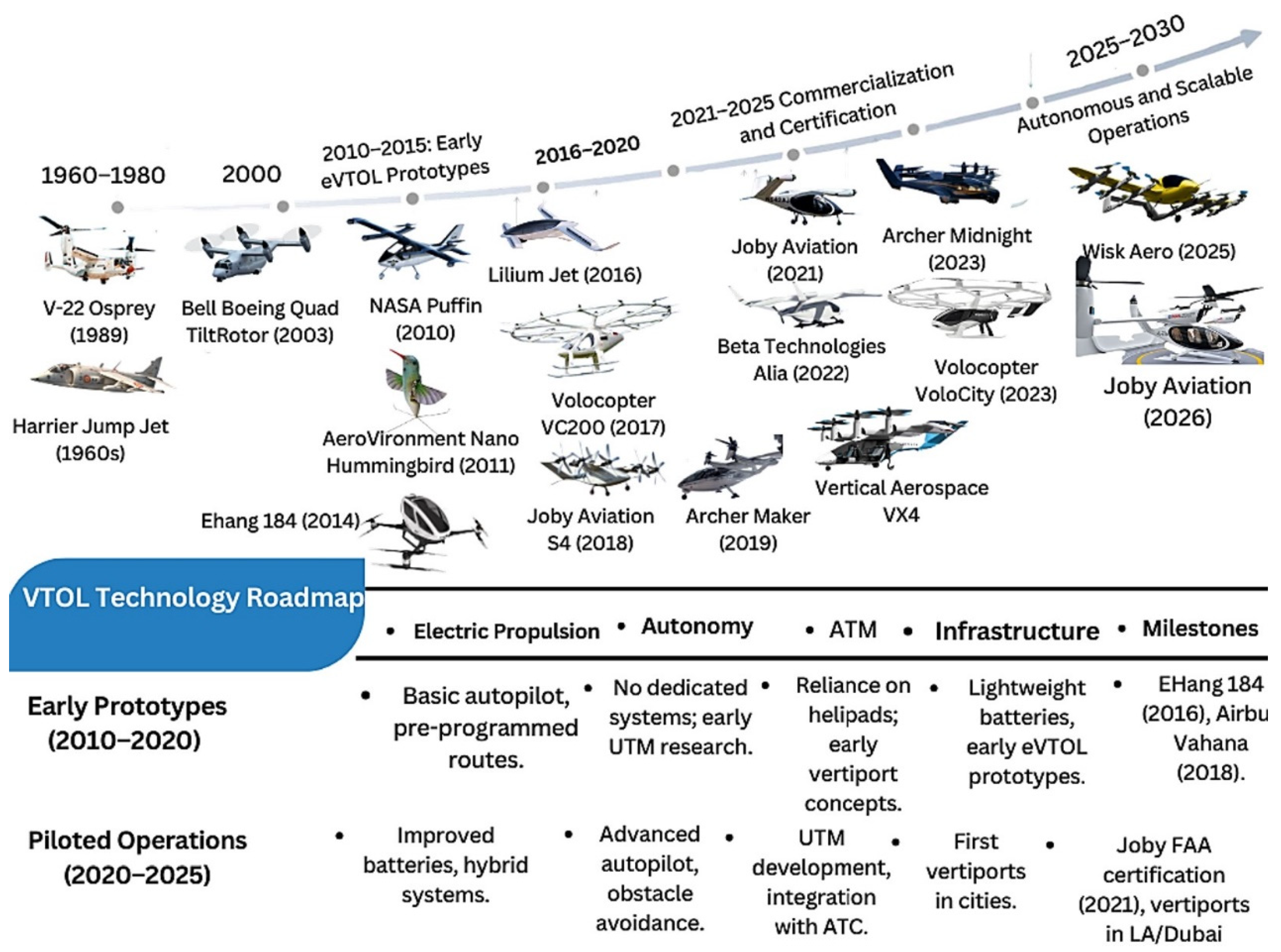
Figure 2.
This figure illustrates various VTOL configurations, including Fixed-wing VTOL, Multi-rotor, Tilt-rotor, Tilt-wing, Blended Wing Body (BWB), and Hybrid designs.
Figure 2.
This figure illustrates various VTOL configurations, including Fixed-wing VTOL, Multi-rotor, Tilt-rotor, Tilt-wing, Blended Wing Body (BWB), and Hybrid designs.
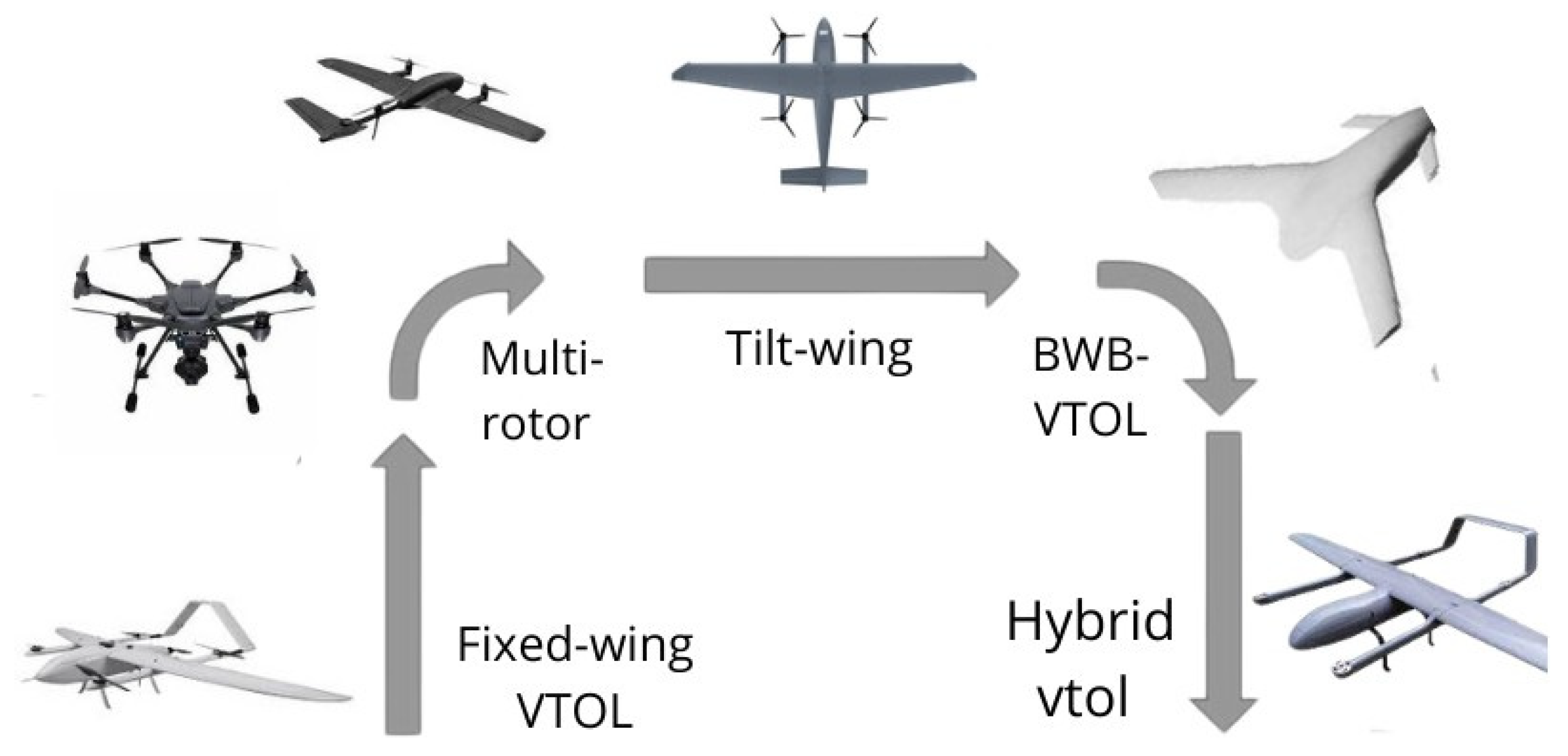
Figure 3.
This diagram illustrates the main components of each configurations of the VTOL UAVs.
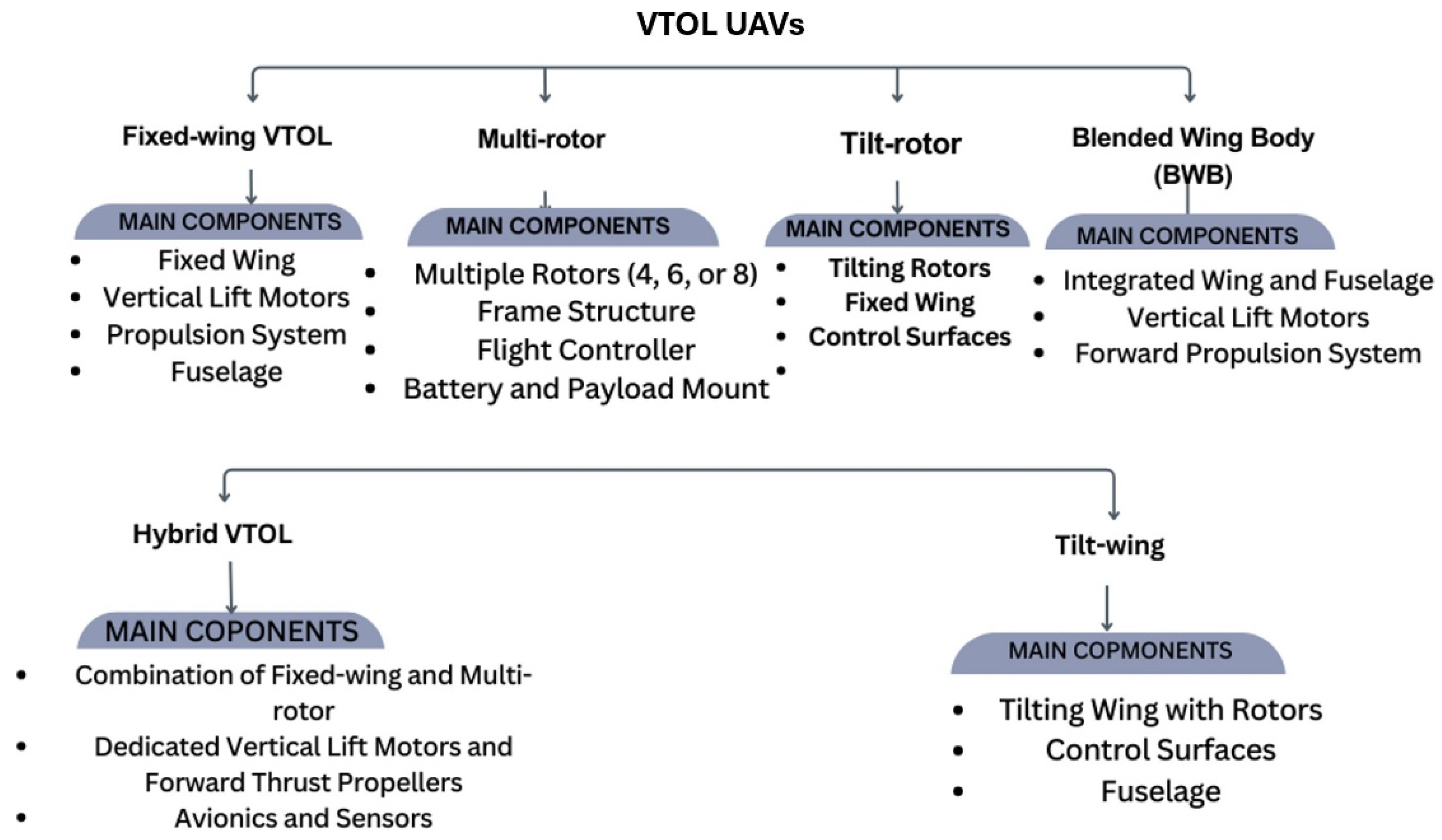
Figure 4.
The figure illustrates the step-by-step design methodology for VTOL UAVs, covering key aspects from defining mission requirements to conceptual design, aerodynamic and structural analysis, propulsion and control system development, and finally, prototyping and testing.
Figure 4.
The figure illustrates the step-by-step design methodology for VTOL UAVs, covering key aspects from defining mission requirements to conceptual design, aerodynamic and structural analysis, propulsion and control system development, and finally, prototyping and testing.
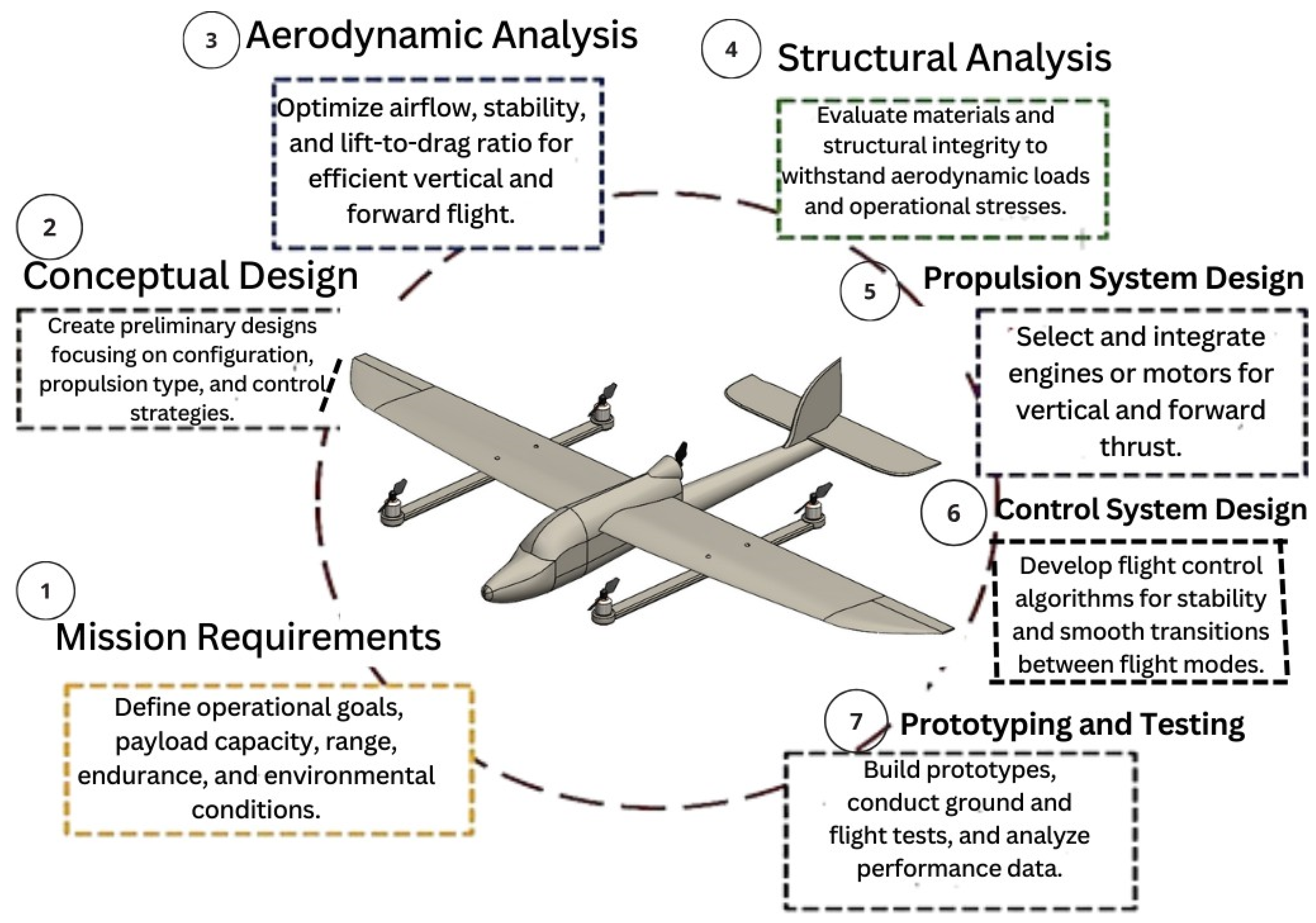
Figure 5.
Main flight stages of the VTOL drone, illustrating the transition from vertical takeoff (VTOL mode) to hover, followed by the transition to fixed-wing mode, forward flight, cruise phase, and finally the transition back to hover mode for landing.
Figure 5.
Main flight stages of the VTOL drone, illustrating the transition from vertical takeoff (VTOL mode) to hover, followed by the transition to fixed-wing mode, forward flight, cruise phase, and finally the transition back to hover mode for landing.
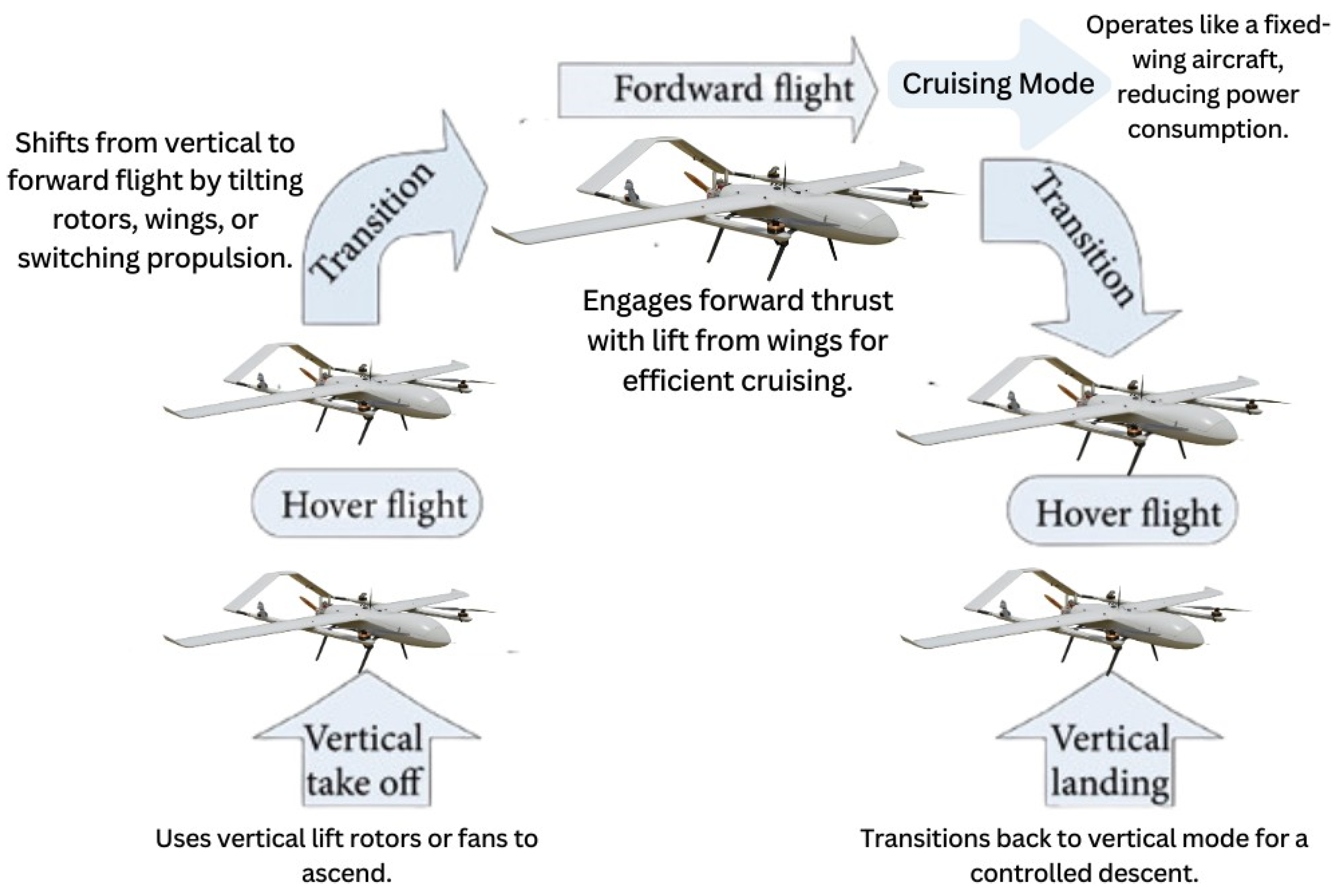
Figure 6.
The chart compares relative energy consumption across various flight modes (Hover, Transition, Cruise, Climb, Descent, Loiter, Landing) for a typical electric VTOL UAV, highlighting efficiency differences during each phase.
Figure 6.
The chart compares relative energy consumption across various flight modes (Hover, Transition, Cruise, Climb, Descent, Loiter, Landing) for a typical electric VTOL UAV, highlighting efficiency differences during each phase.
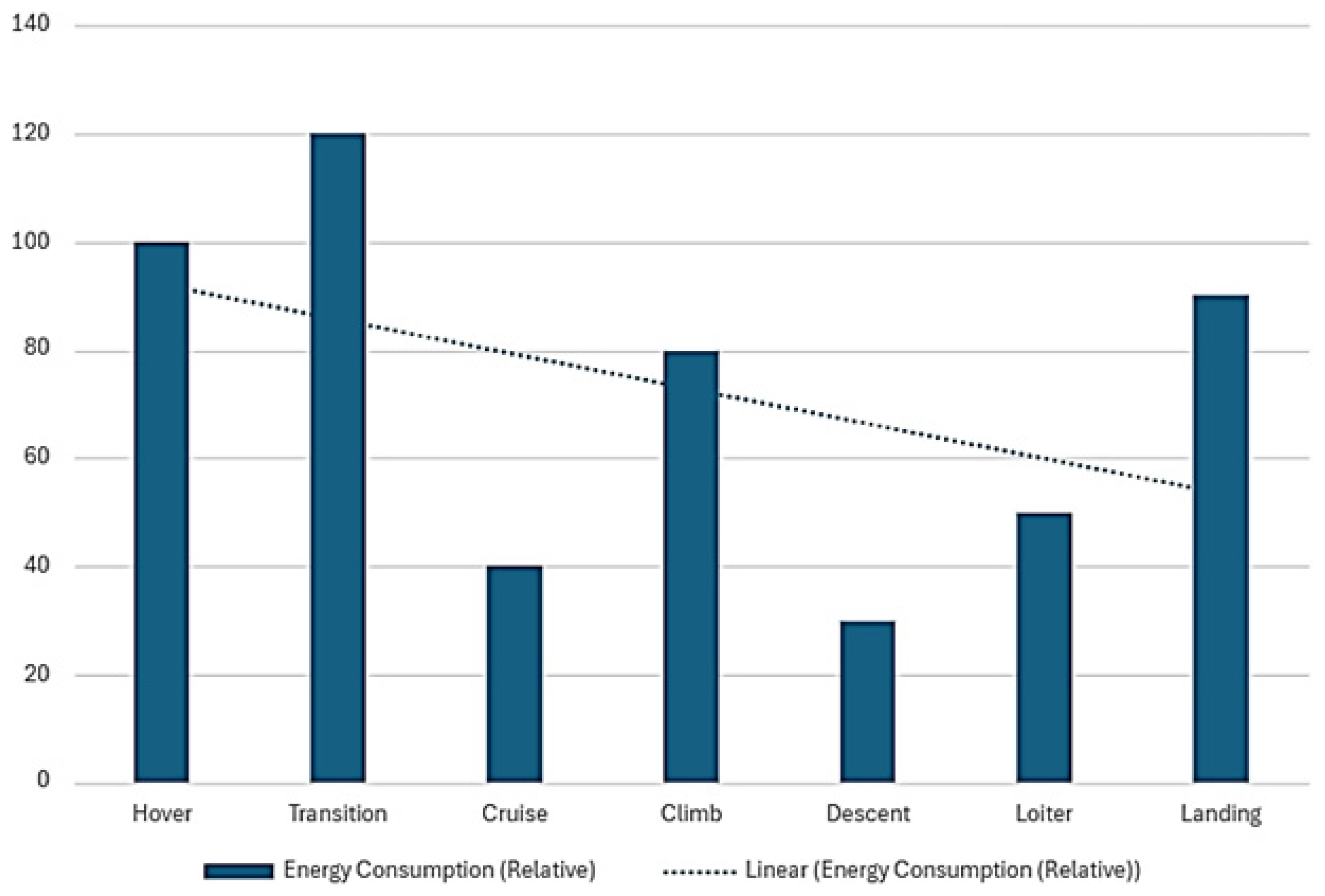
Figure 7.
The chart compares VTOL UAVs propulsion systems in terms of energy efficiency, payload capacity, and range ability.
Figure 7.
The chart compares VTOL UAVs propulsion systems in terms of energy efficiency, payload capacity, and range ability.
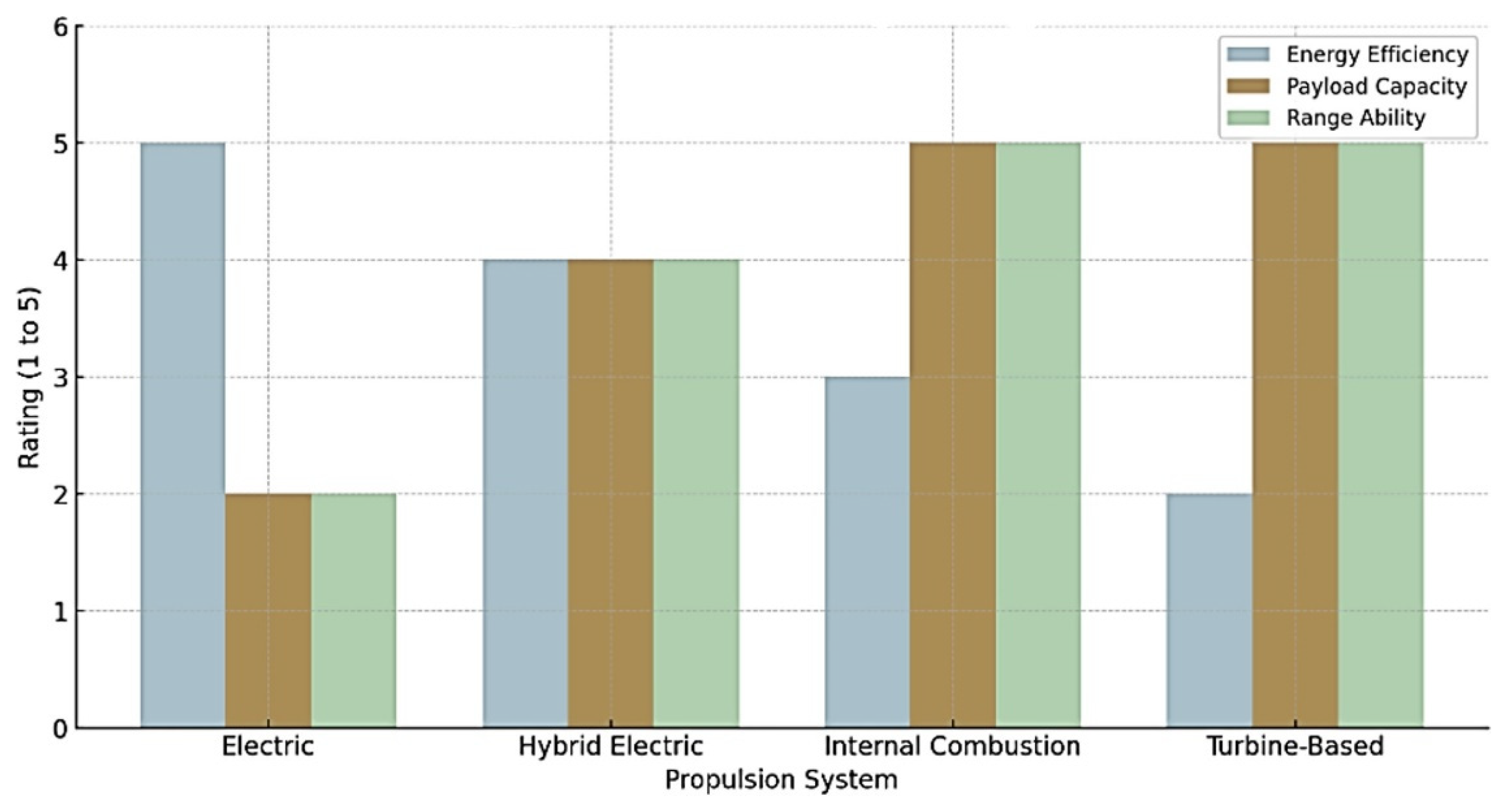
Figure 8.
This figure shows the general configuration for the main components of the VTOL UAV control loop.
Figure 8.
This figure shows the general configuration for the main components of the VTOL UAV control loop.
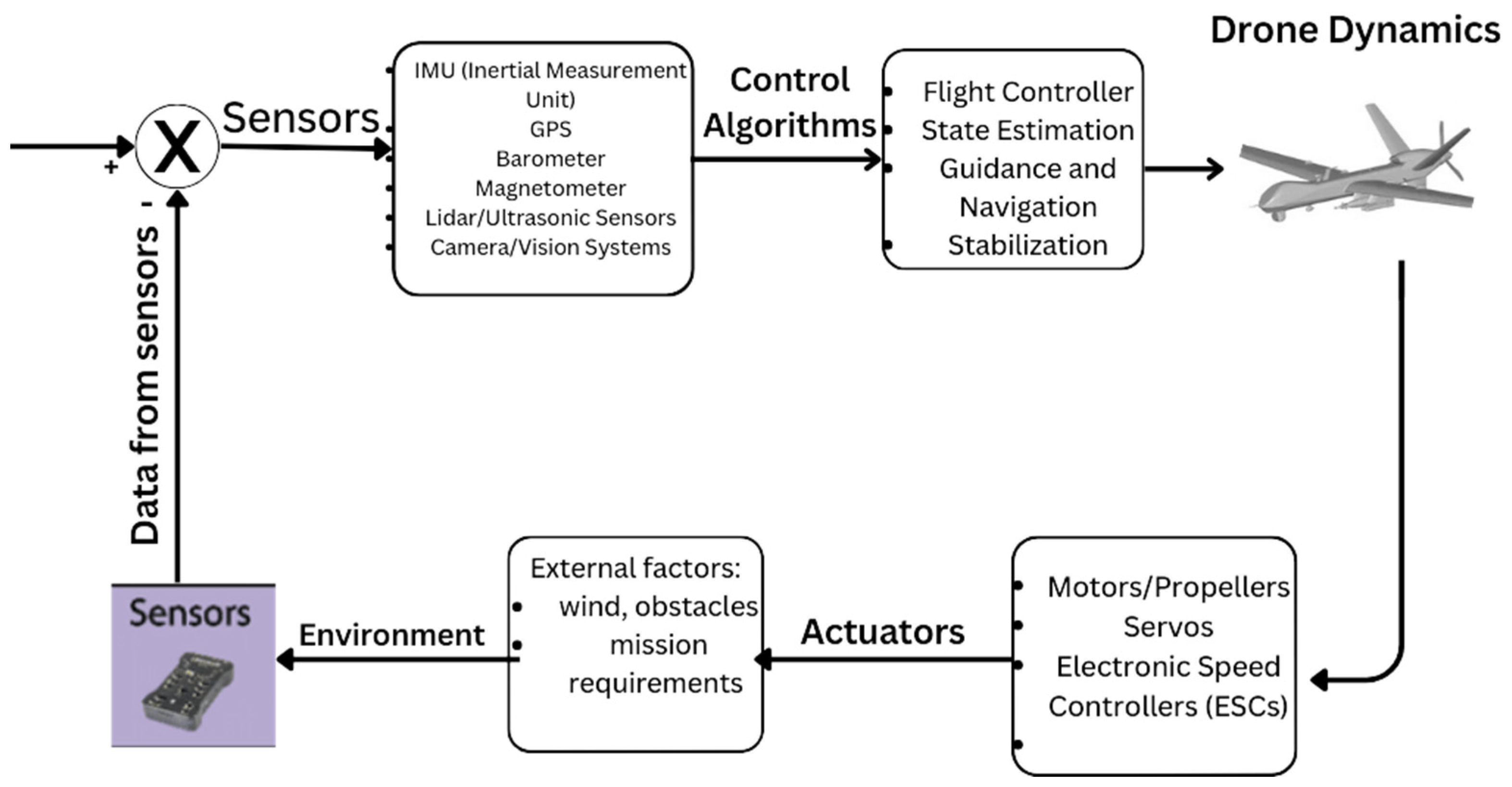
Figure 9.
This figure compares flight control methods Linear, Non-linear, Adaptive, and Model Predictive Control evaluating their performance, complexity, and suitability for different UAV applications.
Figure 9.
This figure compares flight control methods Linear, Non-linear, Adaptive, and Model Predictive Control evaluating their performance, complexity, and suitability for different UAV applications.
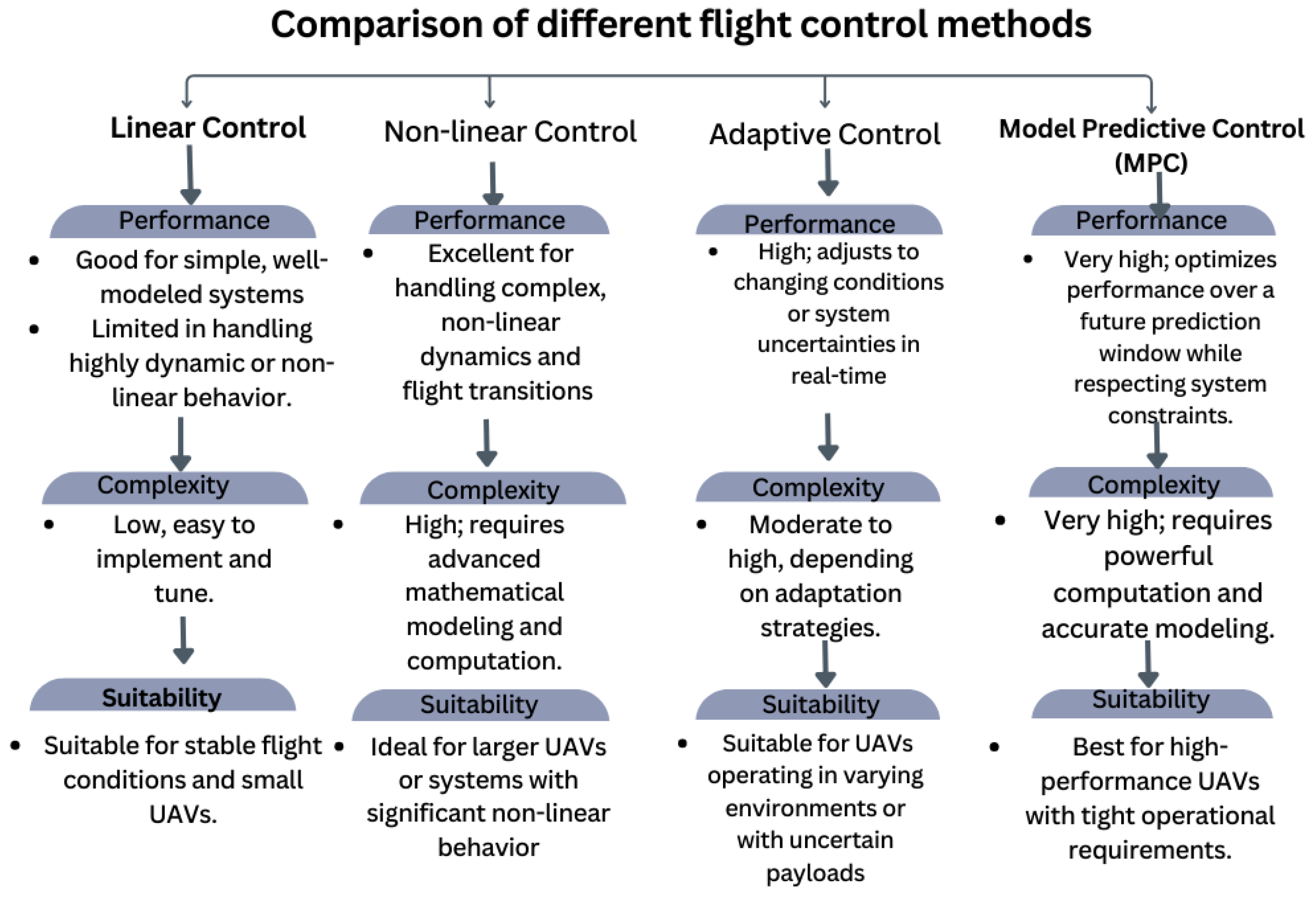
Figure 10.
This figure illustrates the integration of Communication, Navigation, and Surveillance (CNS) with Sensor and Vehicle Management (SVO) and Fly-By-Wire (FBW) systems in a UAV. It shows how sensor data is processed by the Flight Control Computer (FCC) to manage actuators, ensuring precise control and safe navigation.
Figure 10.
This figure illustrates the integration of Communication, Navigation, and Surveillance (CNS) with Sensor and Vehicle Management (SVO) and Fly-By-Wire (FBW) systems in a UAV. It shows how sensor data is processed by the Flight Control Computer (FCC) to manage actuators, ensuring precise control and safe navigation.
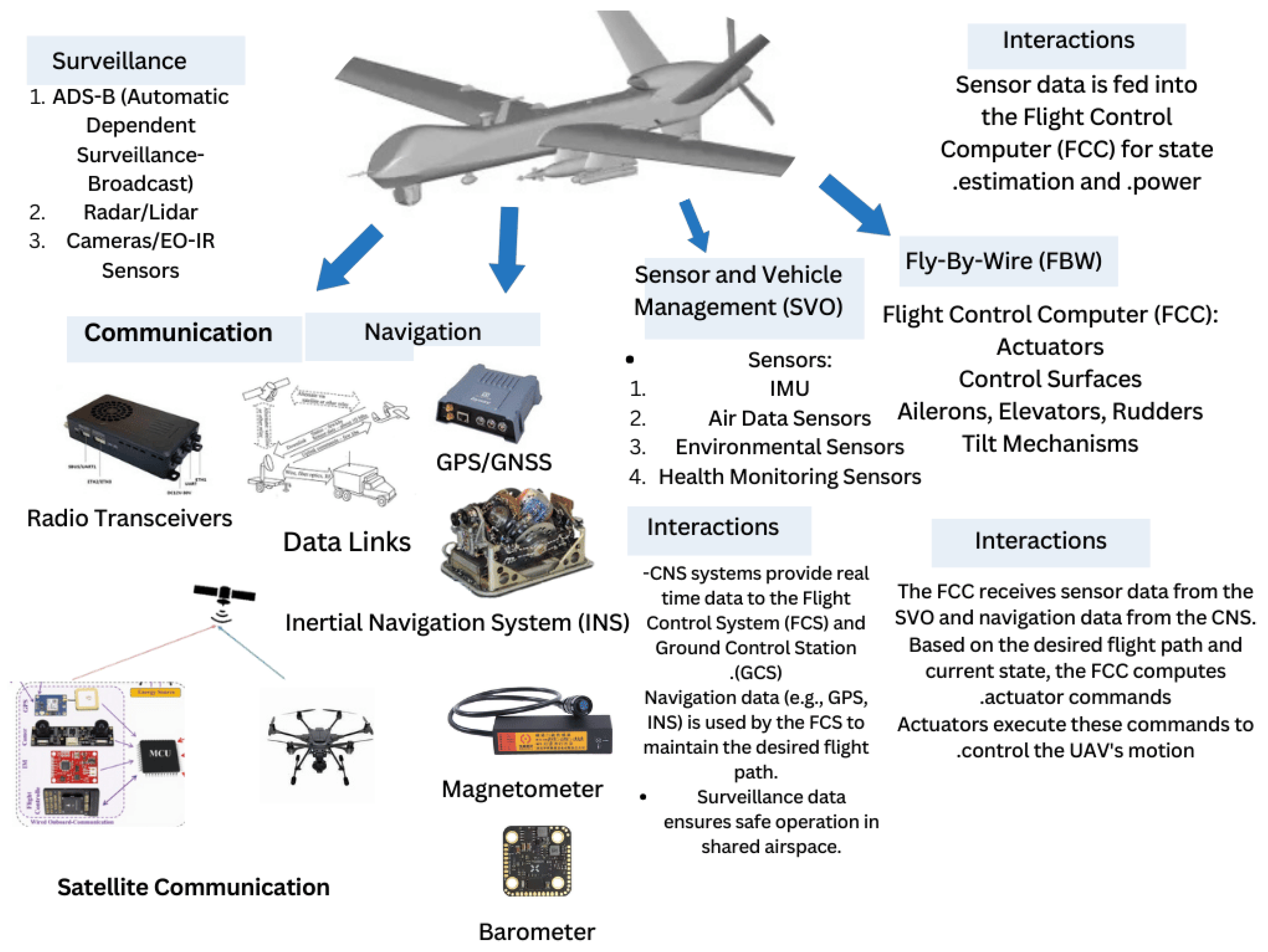
Figure 11.
This figure shows the transition process between hover and forward flight for a VTOL UAV, detailing steps like activating transition logic, monitoring parameters, and stabilizing flight for smooth mode changes.
Figure 11.
This figure shows the transition process between hover and forward flight for a VTOL UAV, detailing steps like activating transition logic, monitoring parameters, and stabilizing flight for smooth mode changes.
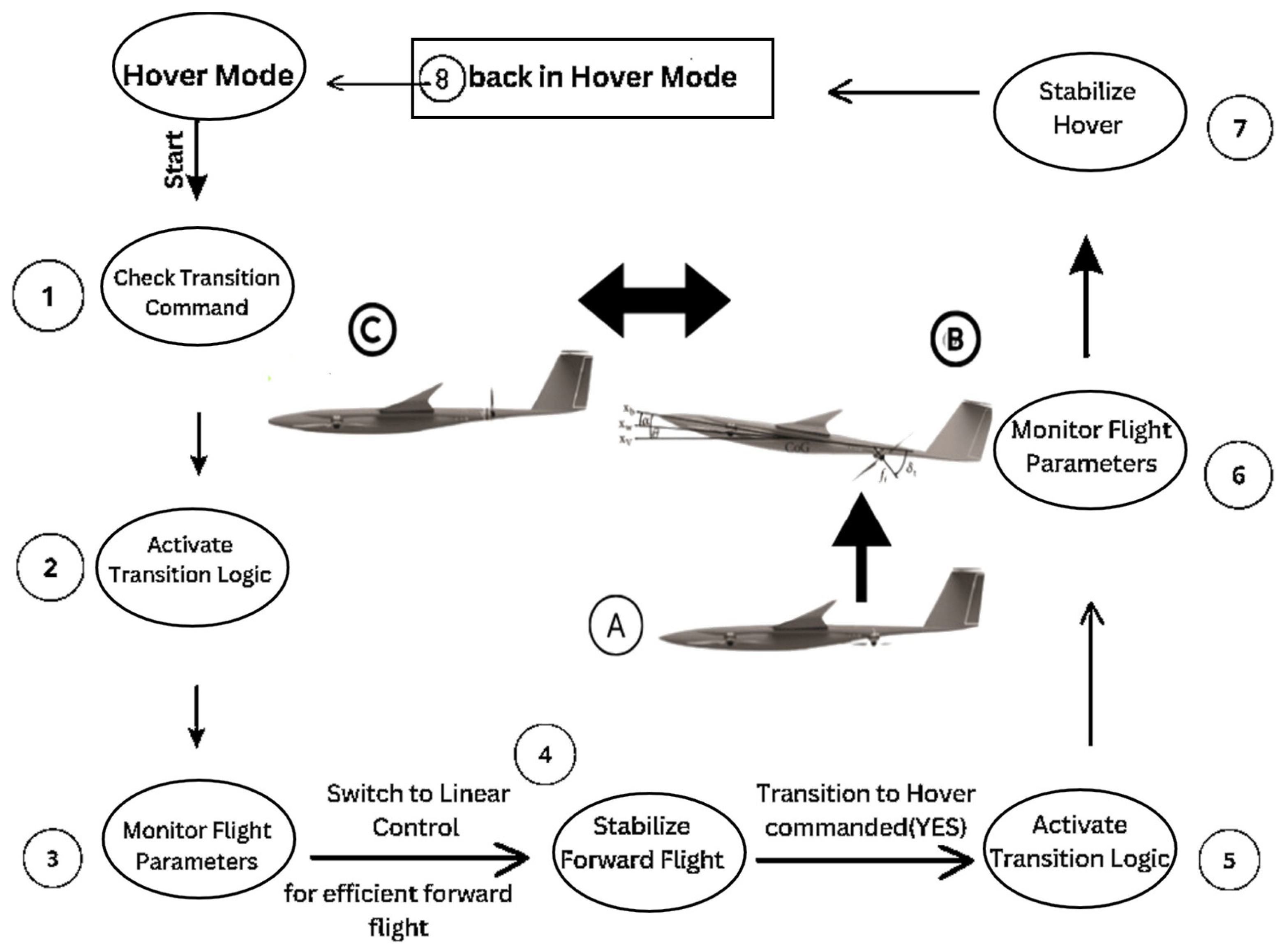
Figure 12.
This figure showcases applications of vertical take-off drones, such as search and rescue, package delivery, and wildlife monitoring, highlighting their versatility in public life.
Figure 12.
This figure showcases applications of vertical take-off drones, such as search and rescue, package delivery, and wildlife monitoring, highlighting their versatility in public life.
Figure 13.
This figure outlines the regulatory approaches of FAA, EASA, and CAAC for VTOL aircraft certification, covering standards, safety, autonomy, testing, and industry impact.
Figure 13.
This figure outlines the regulatory approaches of FAA, EASA, and CAAC for VTOL aircraft certification, covering standards, safety, autonomy, testing, and industry impact.
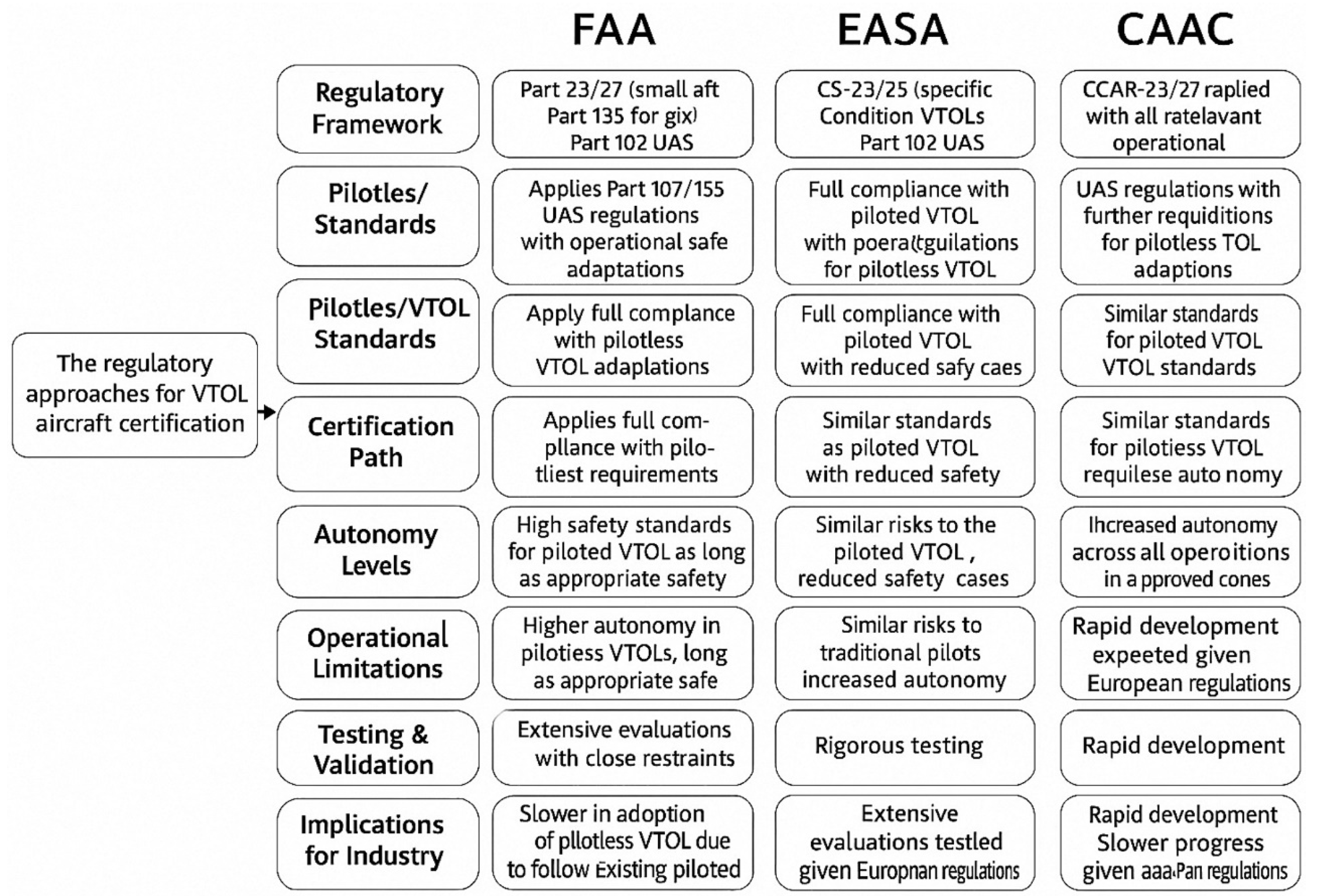

Table 1.
The main VTOL configurations, their characteristics, and typical applications.
| Configuration Type |
Description | Advantages | Disadvantages | Typical Applications |
|---|---|---|---|---|
| Fixed-Wing VTOL |
Fixed wing with addi- tional VTOL mecha- nism |
Combines long range, speed of fixed wing withVTOL |
Increased design complex- ity, additional weight |
Long-range surveillance, mapping, and delivery |
| Multi-rotor VTOL |
Multiple rotors for ver- tical lift |
Excellent maneu- verability, hovering capability, simpledesign |
Limited speed, range, and endurance. Higher energy consumption |
Aerial photography, inspection, short- range surveillance |
| Tilt- rotor/Tilt- wing VTOL |
Rotors or wings that can tilt between verti- cal and horizontal po- sitions for VTOL and forward flight respec-tively |
Combines VTOL and efficient for- ward flight |
Increased mechanical complexity, more complex control systems |
Medium to long-range missions, urban air mobility |
| Blended Wing Body VTOL |
Integrated wing and fuselage with VTOL capability |
Enhanced aerodynamics, reduced drag, larger internal volume |
More complex design and analysis, especially con- cerning the integration of the VTOL mechanism |
Surveillance, high- payload transport |
| Hybrid VTOL | Combination of dif- ferent configurations, e.g., fixed wing with vertical rotors |
Combines advan- tages of different configurations |
Increased complexity, weight, and cost |
Versatile applications, such as surveillance, and remote area oper- ations |
Table 2.
The key design considerations, methods, and tools for VTOL UAVs.
| Design Aspect | Key Considerations | Methods and Tools |
|---|---|---|
| Mission Requirements | Range, payload, endurance, opera- tional environment. |
Mission planning, parameter specifi- cation [34] |
| Thrust Performance | Thrust for take-off, hover, cruise. Mo- tor and propeller selection, and thrust calculations in different modes. |
Thrust tests, motor data sheets, aero- dynamic equations |
| Stability | Center of gravity, symmetrical place- ment of components, moment analy- sis. |
Careful component placement |
| Aerodynamics | Lift, drag, stability. Wing design (as- pect ratio, sweep, taper), aerofoil se- lection, drag calculations |
Computational Fluid Dynamics (CFD), wind tunnel testing |
| Transition | Control strategies for smooth tran- sition between VTOL and forward flight modes. |
PID control, neural network-based nonlinear PID control, sensor fusion and control algorithms |
| Structural Analysis | Material selection for lightweight and strength, component sizing, and placement. |
Finite element analysis (FEA), 3D modeling software (e.g., SolidWorks, CATIA) |
| Wing Loading | Impact of weight on thrust perfor- mance. |
Performance analysis using simula- tion software |
Table 3.
The main propulsion systems, energy management, and related technologies used in VTOL UAVs.
Table 3.
The main propulsion systems, energy management, and related technologies used in VTOL UAVs.
| Aspect | Key Technologies and Considerations |
|---|---|
| Propulsion Systems | Electric motors (brushless DC), gas-driven fans, hybrid systems, various configurations (multi-rotor, lift + cruise, tilt-rotor, tilt-wing, DEP). |
| Motor Selection | RPM vs supply voltage, durability, thermal management, weight. |
| Battery Technology | Lithium-ion and Li-Polymer, energy density, power density, safety, battery management systems (BMS), thermal management, alternative technolo- gies (hydrogen fuel cells). |
| Energy Consumption | Higher during vertical take-off and hover, efficient management for transition, optimization of propulsion system for minimal losses. |
| Component Efficiency | ESCs, motors, propellers. |
Table 4.
The main components, technologies, and methods used in Flight Control Systems and Avionics.
Table 4.
The main components, technologies, and methods used in Flight Control Systems and Avionics.
| Aspect | Key Technologies and Considerations |
|---|---|
| Flight Control Models | Linear and non-linear models, PID control, LQR controllers, robust control methods [60,61]. |
| Control Laws | Algorithms based on hybrid UAV dynamics, real-time adjustments of control gains, control allocation. |
| Avionics | CNS (Communication, Navigation, Surveillance), SVO, FBW, FCC, IMU, Radar Altimeters, V2V, V2G communications. |
| CNS Systems | Air traffic control communication, navigation systems (GNSS, INS, ADS), collision avoidance. |
| SVO & FBW | Automated flight systems, user-friendly interfaces, electronic control of flight surfaces, reduced pilot workload, enhanced control precision, inte- gration with digital systems. |
| Transition Management | Automatic flight control during transition phases, regulation of rotor speeds and engine throttle, altitude and airspeed sensors. |
Table 5.
The main applications of VTOL UAVs across different sectors.
| Sector | Applications |
|---|---|
| Surveillance | Wildlife monitoring, oil pipeline monitoring, infrastructure inspection, traffic monitoring, intruder detection. |
| Military | Intelligence, surveillance, and reconnaissance (ISR), search and rescue operations, operations in difficult terrains. |
| Agriculture | Crop monitoring and analysis, precision agriculture. |
| Logistics & Delivery | Transportation of goods, medical supplies, package delivery in urban and remote areas. |
| Construction | Mapping and monitoring construction sites. |
| Emergency Response | Disaster relief, damage assessment, delivery of aid and supplies. |
| Urban Air Mobility | Air taxis, urban commuting, point-to-point transportation in cities. |
| Media & Entertainment | Aerial photography and videography, filmmaking. |
Table 6.
The main regulatory and societal challenges associated with VTOL UAVs.
| Challenge | Description |
|---|---|
| Lack of Comprehensive Regulations | Absence of clear guidelines for VTOL aircraft certification, operations, airspace management, and infrastructure requirements. |
| Evolving Certification Standards | Need for new airworthiness regulations for eVTOL aircraft, with the FAA and EASA developing specific standards. |
| Integration of Autonomous Technol- ogy |
Regulatory caution regarding fully autonomous operations and concerns about trustworthiness, certification complexity, interpretability limitations, and algorithm constraints. |
| Societal Acceptance | Public concerns about safety, noise, and privacy, and the need to address these issues to gain public trust. |
| Urban Integration | Challenges of integrating VTOL aircraft into existing transportation sys- tems and urban infrastructure while mitigating environmental disruptions and ensuring passenger comfort. |
Table 7.
The main future trends and research directions for VTOL UAVs.
| Trend/Direction | Description |
|---|---|
| Autonomous Operation | Development of sophisticated flight control systems, advanced sensors, and AI-driven decision-making to enable fully autonomous flight. |
| Air Traffic Management Integration | Development of automated routing and communication systems to inte- grate VTOLs into existing airspace, including UTM for real-time tracking and surveillance. |
| Urban Infrastructure Development | Creation of designated vertiports in urban areas, integration with public transportation networks, and development of specialised air traffic control systems. |
| Advanced HMI | Integration of voice and gesture recognition, AR/VR interfaces, and other user-friendly technologies to enhance the pilot and passenger experience. |
| Technical Improvements | Advancements in electric propulsion systems, battery technology, lightweight materials, and aerodynamic designs to improve energy effi- ciency, stability, and overall performance of VTOL aircraft. |
| Safety and Reliability | Focus on the development of high-reliability components and robust fault-tolerant control systems with advanced diagnostic and monitoring capabilities. |
| Regulatory Framework | Work towards a comprehensive set of guidelines that address vehicle certi- fication, operational procedures, safety standards, and security protocols. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



