Submitted:
02 February 2026
Posted:
03 February 2026
You are already at the latest version
Abstract
Vehicle telematics aims to enhance fuel efficiency, reduce emissions, improve diagnostics, promote road safety, and optimize fleet management. Vehicle telematics solutions can be implemented using either smartphone or cyber-physical based systems, offering various applications within the realm of Intelligent Transportation Systems (ITS). This study systematically reviews the existing literature on the applications of smartphone and cyber-physical-based vehicle telematics within ITS. A comprehensive search was conducted in the Web of Science (WoS) and Scopus databases, with the search completed in October 2024. Studies focused on the vehicle telematics applications in ITS were included. Out of 397 articles related to smartphone-based vehicle telematics, 54 were selected for an in-depth review. Similarly, 37 articles were shortlisted from 210 identified studies on cyber-physical-based vehicle telematics. The review reveals that vehicle telematics is utilized in various applications, including eco-driving, eco-routing, driver behavior monitoring, vehicle health diagnostics, road pavement condition monitoring, and fleet management. This systematic review highlights the current state of vehicle telematics in ITS, analyzing and comparing different solutions developed using smartphones and cyber-physical systems. It also identifies existing challenges, reports on scientific trends, and suggests future research directions for expanding the application of vehicle telematics.
Keywords:
cyber-physical systems
; intelligent transportation systems
; on-board diagnostics (OBD-II)
; smartphone
; systematic literature review
; vehicle telematics
1. Introduction
The rapid growth of the global population, particularly in urban areas, is reshaping the landscape of modern cities. It is projected that by the coming decades, 70% of the world’s population will be living in urban environments Young et al. (2020). This never-before-seen urbanization will present several challenges to be addressed, especially in the context of smart city development. One urgent problem lies in smart urban mobility, where people and goods transport have to be paramountly efficient. Thus, for instance, the number of vehicles in Europe increased to over 250 million by 2015, which actually indicates the boom in transportation demand Young et al. (2020). In fact, this brings forth various associated challenges, such as traffic congestion, increased greenhouse gas (GHG) emissions, and impacts on both physical and psychological health in people living in cities. Only road transportation generates 29% of all GHG emissions in the world and 25% of CO2 emissions Malekian et al. (2016). For example, traffic jams accounted for an average cost of 97 hours and $1,348 per U.S. driver in 2018 Haydari and Yılmaz (2020). Smart mobility has now become a prime focus for urban planners working for the cities of the future to resolve these challenges.
Smart urban mobility integrates Information and Communication Technologies (ICT) with urban transport infrastructure to maximize efficiency, safety, and sustainability. Smart mobility treat heterogeneous data sources such as traffic flow characterization, road pavement condition monitoring, and connected vehicle sensors to achieve better urban transportation systems management. Big data technologies have emerged for efficient processing for storage and analysis of a very large volume of data to validate and calibrate traffic models and simulations.
Intelligent Transportation Systems (ITS) is one of the key areas where improvements take place with respect to traffic management services. The main applications here are those that help users get better information toward enhanced safety, mobility, and environmental outcomes. Rapid advancement in technology has been apparent in the transformation of the transportation industry, with the field of ITS growing as a key area of research and development today. The cornerstone in the evolution of such ITS technology is the integration and application of clever technologies, particularly smartphone-based and cyber-physical systems (CPS), in vehicle telematics. The historical data that govern systems and services, which enable much better handling and a sense of adaptation that made the transport networks true in-the-field testing, are revolutionized.
Vehicle telematics is a multidisciplinary domain that encompasses informatics, telecommunications, vehicular technologies, and computer engineering to collect and abstract the information from the vehicles to understand their implications that can further lead to improvements in transport efficiency. Applications of vehicle telematics include driver behaviour classification, eco-driving and eco-routing strategies to reduce fuel consumption and GHG emissions, and fleet diagnostics and management. For instance, eco-driving techniques can enhance a vehicle’s fuel efficiency by 20-45% through driving style optimization, such as reducing harsh braking and acceleration or improving traffic flow Young et al. (2020). Beyond eco-driving, driver behaviour classification through vehicle telematics is instrumental in preventing road accidents, as 24% of all road accidents and 75% of fatal accidents are attributed to driver error Ameen et al. (2021). Vehicle telematics solutions can be implemented through either smartphones or CPS.
1.1. Scope and Significance
The widespread adoption of smartphones, equipped with sensors such as GPS, accelerometers, gyroscopes, and magnetometers, has created new opportunities for Intelligent Transportation Systems (ITS). Smartphones serve as cost-effective, multipurpose platforms for traffic monitoring, accident detection, and driver assistance, often eliminating the need for additional in-vehicle hardware.
Similarly, the widespread integration of On-Board Diagnostics (OBD-II) systems in vehicles since the mid-1990s has significantly advanced ITS. OBD-II provides standardized access to vehicle data, including engine performance, fuel consumption, and diagnostic trouble codes. Combining OBD-II data with smartphone and cyber-physical system (CPS) solutions enables more precise and robust ITS applications, facilitated further by commercially available OBD-II Bluetooth devices.
The synergy of smartphone/CPS and OBD systems offers a rich database for monitoring vehicle position, speed, acceleration, fuel consumption, and driving behavior. Applications range from harsh driving detection and safety surveillance to new insurance schemes. Designing CPS for telematics requires careful consideration of computational capabilities and performance.
While these technologies hold great promise for ITS, challenges remain, including data accuracy, privacy, battery life, and integration of heterogeneous data sources. Additionally, socio-economic and regional factors can influence the optimal deployment and effectiveness of these solutions.
1.2. Motivation and Contributions
This systematic literature review is motivated by the rapid growth of smartphone-based and cyber–physical system (CPS)-based vehicle telematics and their increasing role in Intelligent Transportation Systems (ITS). Despite significant progress in this domain, existing studies are often fragmented, application-specific, or limited to a single technological perspective. A comprehensive and structured synthesis of the state of the art is therefore needed to consolidate existing knowledge, identify gaps, and guide future research and deployment efforts.
The key contributions of this review are summarized as follows:
- We provide a comprehensive and up-to-date systematic review of smartphone-based and CPS-based vehicle telematics applications within the ITS domain, covering a wide range of use cases reported in the literature.
- We present a structured taxonomy of vehicle telematics applications, highlighting their roles in traffic management, road safety, energy efficiency, infrastructure monitoring, and fleet operations.
- We comparatively analyze smartphone-centric and CPS-centric telematics solutions, discussing their architectural differences, operational capabilities, and suitability for various ITS scenarios.
- We identify and critically examine the key technical and practical challenges—such as data reliability, scalability, energy consumption, security, privacy, and interoperability—that hinder the large-scale adoption of vehicle telematics.
- Finally, we outline promising future research directions to support researchers, system designers, and policymakers in advancing vehicle telematics for more efficient, safe, and sustainable ITS deployments.
This study is structured as follows: Section 2 reviews related work, Section 3 outlines the methodology for the systematic literature review, Section 4 presents the background, Section 5 discusses the results, Section 6 presented challenges, Section 7 discussed the future directions, Section 8 presented the limitations, and the final section provides conclusions.
2. Related Work
The integration of smartphones and CPS into vehicle telematics has garnered significant attention within the ITS domain. This body of research reflects the rapid advancement and potential of these technologies, both independently and in tandem. In this section, we review the existing literature on vehicle telematics applications, challenges, and future trends, highlighting key findings and identifying gaps that this systematic review seeks to address. Table 1 provides a summary of the objectives, scope, number of papers reviewed, and key insights from various studies.
Several methods have been explored to enhance driving efficiency using smartphone sensors, particularly in the Indian context. A study by Chatterjee and Madhavan 2022, emphasized the advantages of smartphones over fixed telematics devices, highlighting benefits such as inherent connectivity and cost savings from eliminating additional hardware installations Chatterjee and Madhavan (2022). Despite these advantages, challenges like battery life limitations and difficulties in sensing vehicle acceleration due to changes in smartphone orientation were noted. The impact of geographical data on driver behavior analysis was also highlighted, pointing out significant disparities in road quality between developed and developing nations. A comprehensive review of driver behavior studies was conducted by Zaidan, Alamoodi et al. 2022, who categorized articles into coherent taxonomies based on shared characteristics Zaidan et al. (2022). This research stressed the critical role of data labeling in overcoming research challenges and advocated for small-scale, microscopic studies to build diverse datasets. These datasets are essential for comparing driver behaviors across different regions, contributing to the development of smart transportation systems. Various devices and methodologies used in naturalistic driving studies have been investigated, with Singh and Kathuria 2021 underscoring that driver behavior is a primary contributor to road accidents Singh and Kathuria (2021a). The study highlighted the growing role of smartphones as essential tools for collecting driving data, revealing drivers’ tendencies to reduce speed and increase headway during distracting situations or adverse weather conditions. The importance of providing regular feedback to drivers to improve driving behavior and enhance road safety was also emphasized. Driver profiling to promote safe and eco-driving behaviors has been a key focus in recent research. In their study, Singh and Kathuria 2021 discussed parameters and methods used in driver profiling, highlighting the importance of feedback mechanisms and usage-based insurance schemes Singh and Kathuria (2021b). The widespread use of smartphones was endorsed due to their ubiquity and effectiveness in gathering driver behavior data. Factors influencing fuel consumption in relation to driving behavior have been examined by Fafoutellis, Mantouka et al. 2020, with various modeling techniques reviewed for accurate fuel consumption estimation Fafoutellis et al. (2020). The research found that driving behavior, along with weather and traffic conditions, vehicle specifications, and road geometry, significantly impacts fuel efficiency. Machine learning models such as Support Vector Machines (SVM), Random Forests (RF), and Neural Networks (NN) were identified as suitable methods for predicting fuel consumption based on driving style data. A critical overview of driver recording tools was provided by Ziakopoulos, Tselentis et al. 2020, comparing technologies like smartphones and in-vehicle data recorders Ziakopoulos et al. (2020). The study identified cost as a significant barrier to adopting advanced tools and suggested that traditional methods, including surveys, interviews, and simulators, still hold value in research. Challenges in automotive diagnostics have also been reviewed, with de Oliveira, Wehmeister et al. 2017 noting the widespread use of OBD systems to collect vehicle data, which is then transmitted to remote servers de Oliveira et al. (2017). The study pointed out that the human-machine interface is an underexplored area in automotive diagnostics and suggested the use of voice recognition to reduce driver distraction. Finally, the application of smartphones in ITS has been explored by Engelbrecht, Booysen et al. 2015, who concluded that smartphones could enable comprehensive vehicle monitoring and driver assistance systems Engelbrecht et al. (2015). The potential of smartphones to facilitate optimal route selection, reduce congestion, and alert authorities to the causes of traffic disruptions was highlighted.
While previous reviews have provided valuable insights, certain limitations remain. For instance, some reviews did not capture the most recent advancements in vehicle telematics technology, potentially overlooking emerging applications or challenges. Reviews that covered a broader range of driver recording tools beyond smartphones may offer a less focused analysis of the unique aspects of vehicle telematics Ziakopoulos et al. (2020). Additionally, studies concentrated on specific areas, such as automotive diagnostics, may not fully address the broader applications and challenges of vehicle telematics within ITS de Oliveira et al. (2017). This systematic review aims to fill these gaps by providing a comprehensive exploration of applications, challenges, and future trends specific to smartphone and CPS based vehicle telematics.
3. Methodology
This review was performed following the Preferred Reporting Items for Systematic Reviews and Meta-Analyses (PRISMA) guidelines. These guidelines allow systematic reviewers to plan and conduct careful and explicit document what is planned, enabling others to replicate review methods and to judge the validity of methods used Shamseer et al. (2015).
3.1. Research Questions
Several applications of vehicle telematics that leverage smartphones and CPS already exist. The The present study aims systematically gather and review these applications developed using smartphones and CPS. Additionally, the study examines the significance, challenges, and potential future research directions of vehicle telematics. The following questions are addressed in this study:
RQ1 – What are the applications of vehicle telematics in ITS.
RQ2 – To identify challenges in smartphone-based vehicle telematics in ITS.
RQ3 – To identify challenges in cyber physical-based vehicle telematics in ITS.
RQ4 – To identify promising future research directions of vehicle telematics.
3.2. Search Strategy
For literature survey, two prominent databases (Scopus and Web of Sciences (WoS)) were searched using the library portal at University of Malaya, Malaysia in October 2024. The selection of Scopus and WoS as the primary databases was based on their comprehensive coverage of high-quality, peer-reviewed publications from reputable publishers. These databases provide extensive indexing across various disciplines, ensuring that relevant and high-impact studies on vehicle telematics are included. The literature review was restricted to the last seven years 2018-2024 because of the dynamic nature of embedded systems. Any technology older than seven years is already made redundant by new advancements. The frequency of proposed advancement in compute boards, communication modules and cloud computing platform are rather frequent.
The keyword selection process was structured to ensure the retrieval of relevant research on vehicle telematics. The search terms were derived from key concepts in the domain, incorporating variations and Boolean operators to maximize coverage. To extract the relevant material, the searched strategy was based on following key words:
- ("OBD*" AND ("smartphone" OR "smart phone" OR "mobile"))
- (“OBD-II” AND “Intelligent Transportation System”)
- (“Traffic” AND “OBD-II” AND “Intelligent Transportation System”)
- (“Internet of Things” AND “OBD-II” AND “Intelligent Transportation System”)
These keywords were iteratively refined based on preliminary search results to ensure a balance between specificity and comprehensiveness. The rationale behind these selections was to target studies that discuss both smartphone-based and cyber-physical-based telematics solutions while capturing relevant advancements in IoT, vehicle diagnostics, and driver behavior monitoring.
By searching two databases we found 367 and 240 papers from Scopus and WoS database respectively as shown in Table 2.
3.3. Inclusion and Exclusion Criteria
The following criteria were followed in selecting relevant papers,
- The proposed vehicle telematics solution should be smartphone and cyber physical based.
- The article must be published by a reputable publisher.
- Full article text is available online and accessible.
- The article has been published in the last seven years.
- No limit applied for the type of document, Therefore, content types such as journal articles, reports, conference papers, book chapters, theses, and dissertations, etc. were included.
3.4. Study Selection and Extraction
The smartphone and CPS based vehicle telematics solution literature review was undertaken according to PRISMA framework as can be seen in Figure 1.
The title, abstract, keywords, authors’ names and affiliations, journal name, and year of publication of the identified records were exported to an MS Excel spreadsheet. The publication selection process followed the PRISMA framework, ensuring a transparent and systematic approach. Initially, duplicate records were removed, followed by title and abstract screening based on predefined inclusion criteria. Full-text eligibility assessments were performed independently by two reviewers, with disagreements resolved through discussion or the involvement of a third reviewer. This meticulous selection process ensured that only the most relevant and high-quality studies were included in the systematic review.
3.5. Results
After searching the two databases, i.e., Scopus and WoS total 609 records were found. 450 remained after removing 157 duplicate records. After Initial scanning of title and abstract, 175 more records were discarded. 275 reports were retrieved for full text screening, but 6 reports couldn’t be retrieved for full text. After screening the full text, 198 reports were discarded which did not fulfill the eligibility criteria of the systematic review. There were 91 studies that met the inclusion criteria and were selected for further analysis as shown in Table 3.
4. Background
The architecture of vehicle telematics systems typically includes an OBD-II adapter, which can be easily installed on the OBD-II port provided by the vehicle manufacturer. Across nearly all the studies reviewed in this work, the ELM327 OBD-II adapter is the preferred choice. This adapter transmits vehicular data either via Bluetooth or Wi-Fi to a smartphone or a CPS for further processing. The development of the standard OBD-II in 1996 by the Society of Automotive Engineers (SAE), USA, marked a significant advancement in regulating vehicular emissions Malekian et al. (2016). This standard led to the integration of sensor arrays in modern vehicles, which monitor emissions, diagnostics, and fuel efficiency. These sensor arrays are collectively referred to as the vehicle’s Electronic Control Unit (ECU). Data from the ECU can be accessed through a single OBD-II port. The OBD-II system utilizes two types of codes to request ECU data: DTCs for vehicle diagnostics and Parameter Identifiers (PIDs) for real-time vehicle performance monitoring Molina Campoverde et al. (2021).
There are five signalling protocols used for communication with the ECU via the OBD-II port: SAE J1850 (VPW and PWM), ISO 9141, ISO 15765 (CAN), and ISO 14230 (KWP2000) Malekian et al. (2016). The primary distinction among these protocols lies in their pin configurations, which in turn determines the set of vehicular parameters each protocol can provide. Manufacturers typically implement only one signalling protocol; for example, SAE J1850 PWM is the standard used by Ford Motor Company, USA. The OBD-II port offers access to a rich portfolio of vehicle parameters, exceeding 200 in number Zhu et al. (2018). However, the selection of specific parameters depends on the research objectives, which may include driver style classification, eco-driving/routing, accident detection/notification, fleet management, and diagnostics, among others. The most commonly selected parameters in the studies reviewed are summarized in Table 5. The same parameters are shown in Tables 7 and 8, used in various studies

Table 4.
Vehicular sensor parameters used for different vehicle telematic based applications
| Variables | Nomenclature | Units | Variables | Nomenclature | Units |
|---|---|---|---|---|---|
| Acceleration | ACC | m/s2 | Accelerometer | ACCM | |
| Air Pressure | AP | Camera | Cam | ||
| Ambient Air Temperature | AAT | International Roughness Index | IRI | ||
| Absolute Engine Loads | AEL | Longitude | LON | ||
| Absolute Throttle Position | ATP | Latitude | LAT | ||
| Average Fuel Consumption | AFC | °C | Altitude | ALT | |
| Air to Fuel Ratio | AFR | Angular Acceleration | AcA | ||
| Air Metering | AM | Longitudinal Acceleration | LonA | ||
| Accumulated Fuel Consumption | AFC | Vertical Acceleration | VerA | ||
| Accumulated Mileage | AM | Lateral Acceleration | LatA | ||
| Accelerator Pedal Position | APP | Smartphone Elevation | SE | ||
| Acceleration Pedal Degree | APD | Long-term Fuel Trim | LTFT | % | |
| Abrupt Braking | AB | Location | L | ||
| Auxiliary Emission Control | AEC | Load Fuel | LF | ||
| Air Bag Active | ABA | Lambda Sensor | LS | ||
| Brake Drum | BD | Mass Air Flow | MAF | g/s | |
| Braking | B | Motor Temperature | MT | ||
| Brake Pedal Position | BPP | Magnetometer | MAG | ||
| Battery Voltage | BV | Mileage | M | ||
| Battery Current | BC | Oxygen Sensor | O2 | V | |
| Battery Temperature | BT | Oil Pressure | OP | ||
| Battery Cell Level | BCL | Oil Service Time | OST | ||
| Barometric Pressure | BP | OBD Standard | OBDS | ||
| Calculated Engine Load | CEL | % | PID Check | PIDC | |
| Crank Position | CP | Pedometer | PED | ||
| Cruising | CR | Relative Throttle Position | RTPS | ||
| Car Pressure | CP | Rapid Lane Changes | RLC | ||
| DTC Number | DTCN | Relative Engine Torque | RET | ||
| Distance Ahead Vehicle | DAV | Relative Friction Torque | RFT | ||
| Distance Travelled | DT | Real Time Clock | RTC | ||
| Differential Pressure (DP) Across DPF | DP | Short-term Fuel Trim | STFT | % | |
| Deceleration | DEC | State of Air Condition | SAC | ||
| Engine Load | EL | Steering Wheel Angle | SWA | ||
| Engine Speed (RPM) | RPM | rpm | Seat Belt Alert | SBA | |
| Engine Temperature | ET | Shift Up Event | SUE | ||
| Engine Coolant Temperature | ECT | °C | State of Charge | SOC | |
| Engine Condition | EC | Slope Per Segment | SPS | ||
| Exhaust Gas Temperature | EGT | Smoothness Indicator | SI | ||
| Equiv Ratio | ER | Time | T | ||
| Engine Running Time | ERT | Time Impact Ahead Vehicle | TIAV | ||
| Engine Fuel Rate | EFR | Throttle Position | TP | % | |
| Engine Position | EP | Throttle Valve | TV | ||
| Continue | |||||
Table 5.
Vehicular sensor parameters used for different vehicle telematic based applications
| Engine Oil Temperature | EOT | Tire’s Pressure | TP | |
|---|---|---|---|---|
| Engine Operational Time | EOPT | Timing Advance | TA | |
| Engine Idle Time | EIT | Trip Time | TT | |
| Engine Start-Ups Number | ESN | Torque | Trq | |
| Engage Gear | EG | Turn Signal | TS | |
| Fuel Level | FL | Vehicle Speed | VSS | m/s |
| Fuel Tank Level Input | FTLI | Vibration | V | |
| Fuel Pressure | FP | Wipers Status | WS | |
| Fuel Flow | FF | Intake Manifold Pressure | MAP | kPa |
| Fuel Efficiency | FE | Intake Air Temperature | IAT | |
| Fuel Consumption | FC | Instantaneous Fuel Consumption | IFC | |
| Fuel Consumption Rate | FCR | Instantaneous Vehicle Speed | IVS | |
| Fuel Rail Pressure | FRP | Illuminance | ILM | |
| Fuel Temperature | FTM | Idling Percentage | IP | |
| Fuel Metering | FM | Jerk | JK | |
| Fleet Tracking | FT | Knock Sensor | KS | |
| Gyroscope | GYR | Harsh Events | HE | |
| Gear Change | GC | Headlights Status | HS | |
| Global Positioning System | GPS | Heat Control Valve | HCV |
Vehicle telematics plays a crucial role in improving various aspects of vehicular operation, including fuel consumption, emissions, diagnostics, road safety, and fleet management. These solutions are primarily implemented through either smartphone-based platforms or CPS. As a critical component of ITS, vehicle telematics contributes significantly to smart mobility initiatives. In the literature, vehicle telematics is also referred to as the Internet of Vehicles (IoV) or Vehicle-as-a-Sensor (VaaS). ITS leverage advanced sensing, analysis, control, and communication technologies to enhance the safety, mobility, and efficiency of ground transportation. These systems encompass a broad spectrum of applications aimed at alleviating congestion, improving traffic management, reducing environmental impacts, and maximizing the overall benefits of transportation for both commercial users and the public.
5. Results
This section addresses our first Research Question (RQ-1): What are the applications of vehicle telematics in ITS?
Vehicle telematics plays a pivotal role in ITS by transforming vehicles into mobile sensors that collect and transmit data. This data serves multiple purposes, ranging from eco-driving and eco-routing to driver behavior monitoring, vehicle diagnostics, driver safety, fleet management, and road pavement condition monitoring (RPCM). The range of applications is illustrated in Figure 2, which categorizes them broadly into three main areas: Ecological Driving (Eco-driving/routing, driver behavior), Fleet Management (fleet management, vehicle diagnostics), and Infrastructure (identifying road network inefficiencies, road pavement conditions monitoring). However, as a relatively nascent field, many potential applications of vehicle telematics remain underexplored. For instance, Sohail et al. (2019) utilized vehicle telematics to identify road bottlenecks and assessed its cost in terms of CO2 emissions, fuel consumption, and time delays. Tables 7 and 8 show the component breakdown of smartphone-based and cyber physical-based vehicle telematics solutions proposed in the literature, respectively.
5.1. Ecological Behaviour
Among the factors that can affect fuel consumption, such as: Vehicle age and condition, outside temperature, weather, and traffic conditions, ecological behavior can be one of the most important parameter Fafoutellis et al. (2020); Vdovic et al. (2021).
5.1.1. Eco Driving
Eco-driving is a method that promotes driving behaviors aimed at reducing fuel consumption and lowering GHG emissions. Research indicates that eco-driving can decrease fuel consumption by 15% to 25% and cut GHG emissions by over 30% Yao et al. (2020). Using vehicle telematics, real-time feedback encourages drivers to adopt these fuel-efficient practices, which is particularly valuable given that fully autonomous and electric vehicles (EV) are still in development. Eco-driving, therefore, remains essential for improving the efficiency of current road transport. The techniques in eco-driving focus on practices like smooth acceleration, maintaining steady speeds, minimizing idling, and selecting optimal routes Ding et al. (2017). These habits not only save fuel but also enhance driver safety and reduce vehicle maintenance costs. In fact, drivers can boost fuel efficiency by up to 45% through eco-driving Young et al. (2020). Transportation contributes significantly to global emissions, with the sector responsible for 25% of fuel consumption and 29% of carbon emissions worldwide—a number that has risen by 36% since 1990 Young et al. (2020). Consequently, eco-driving plays a crucial role in mitigating the environmental impact of transportation. Aggressive driving, a major cause of traffic accidents, results in over 1.25 million fatalities globally each year according to WHO (Organization 2015). Studies suggest that smoother driving styles not only improve engine efficiency but also decrease emissions, making eco-driving an effective strategy for addressing both environmental and safety challenges.
Research highlights that eco-driving training can be beneficial, especially for drivers with poor eco-driving skills, enabling them to reduce fuel consumption by up to 20% while enhancing driving safety Massoud et al. (2019). Shifting to a more efficient driving style can yield up to 25% fuel savings depending on the vehicle type Nousias et al. (2019). There are five widely recognized eco-driving practices that significantly affect fuel consumption and emissions Beusen et al. (2009):
- 1.
- Avoid rapid starts and accelerate smoothly.
- 2.
- Decelerate smoothly by releasing the accelerator early while keeping the car in gear.
- 3.
- Maintain a steady speed by anticipating traffic flow.
- 4.
- Shut down the engine during extended stops.
- 5.
- Shift gears as soon as possible and avoid high engine revolutions Massoud et al. (2019).
By implementing these techniques, drivers can improve safety, save fuel, and reduce emissions, making eco-driving a practical and impactful approach to sustainable transportation.
Both studies, Fafoutellis et al. (2020) and Rykała et al. (2023), focused on analyzing vehicle fuel consumption by leveraging data from OBD and smartphone devices, identifying key factors that influence fuel usage and evaluating model effectiveness for accurate prediction. In Fafoutellis et al. (2020), the authors review literature on eco-driving and present models for calculating fuel consumption, highlighting five main components: driving style, road geometry, vehicle specifications, traffic, and weather conditions, with driving style—particularly speed and acceleration—being the most significant factor. They assess the applicability of Machine Learning models, such as NN, SVM, and RF, for predicting fuel consumption based on driving behavior data. Meanwhile, Rykała et al. (2023) investigates vehicle fuel consumption using an affordable OBD-II interface combined with mobile technology, employing models like multivariate regression (MR), decision trees (DT), and NN. This study identifies vehicle design, weight, acceleration, speed, and engine load as critical factors and reports that while regression models achieve reasonable accuracy, NN outperforms them in error metrics. The authors suggest further improving prediction accuracy by integrating additional variables, such as weather conditions and specific driving scenarios, to optimize fuel efficiency.
Studies Meseguer et al. (2017); Vdovic et al. (2021), and De Rango et al. (2022) explored various data-driven platforms and frameworks aimed at analyzing driver behavior, fuel consumption, and promoting eco-friendly driving through advanced techniques and technologies. The "Driving Styles" platform conceived in Meseguer et al. (2017) uses data mining and NN on OBD-II data to classify driving behaviors along characteristics such as speed, acceleration, and Revolutions Per Minute (RPM). It can automatically identify route type and driving style, showing that aggressive driving increases fuel consumption by 20%, averaging 8 liters per 100 km compared to 6.6 liters for calmer driving. Study Vdovic et al. (2021) introduced for assessment eco-efficient driving patterns, a data enrichment framework focused on real-time data acquisition, contextual data enrichment, and analytics. Data from nine different drivers during a seven-week period revealed the possibility of enriched automotive data for sustainable transportation linking driving behavior with fuel consumption and emissions. Finally, a fuzzy inference system based approach is proposed within the IOV for encouraging eco-friendly driving De Rango et al. (2022). The system identified driving nature and provided real-time recommendations to reduce CO2 emissions through an OBD device and cloud processing using MQTT for communication. The application of these IoT communicating protocols has also been discussed in this particular study, which focuses on demonstrating their involvement in improving driver performance and facilitating the advancement of IoT-based transportation systems.
Studies Yao et al. (2020); Shaw et al. (2019); Konstantinou et al. (2023); Campoverde et al. (2023) have investigated new methodologies for predicting as well as optimizing vehicle fuel consumption concerning smartphone data, OBD-II devices, and machine learning models. In Yao et al. (2020), a smartphone-based approach was proposed, using driving behavior data from mobile phones and fuel consumption data from OBD systems to predict fuel usage. This study applied back propagation neural networks (BPNN), support vector regression (SVR), and RF, with the latter achieving the highest accuracy, making it feasible for large-scale use without extensive OBD installations. In Shaw et al. (2019), the authors developed a real-time fuel consumption estimation system for gasoline vehicles, introducing a Powertrain-based Model (using fuel injection data) and a Vehicle Dynamics-based Model (using GPS data). Field tests showed an average estimation error of around 6%, proving its compatibility with passenger vehicles and adaptability for broader vehicular applications. Study Konstantinou et al. (2023) built on fuel consumption modeling by using real-world OBD and smartphone data to assess eco-driving behaviors’ impact on fuel efficiency. A Gradient Boosting DT model, achieving a mean absolute percentage error (MAPE) of 9.8%, was developed, with Shapley Additive Explanations (SHAP) further clarifying factors that influence fuel consumption, offering practical insights for real-world fuel efficiency improvements. Finally, Campoverde et al. (2023) investigated how fuel type, air filter condition, and fuel filter cleanliness affect consumption in a multipoint injection (MPI) engine across urban, rural, and highway settings in Quito, Ecuador. This study found that higher-octane fuel (92) can reduce fuel use by up to 24.38% compared to lower-octane fuel (85), underscoring fuel type’s significant role in enhancing efficiency across various driving conditions.
Studies Massoud et al. (2019); Nousias et al. (2019) evaluate gamification-induced platforms for eco-driving behavior by using Internet-of-Things sensors, mobile technology, and real-time feedback systems. The GamECAR project Nousias et al. (2019) created an innovative interactive platform to promote and support healthy driving habits through activations of gamification in driving. In combination with in-vehicle, physiological variables, the system captures behaviour-based descriptions on fuel consumption, braking, accelerating, and gear changes, producing an eco-score for the driver to motivate or encourage a positive change. Gamification helps use rewards, challenges, and other means to bring in competition by motivating the drivers to switch to more eco-friendly driving yet keeping the drivers safe on the road. A framework combining serious gaming elements with IoT sensors for eco-driving was discussed in Massoud et al. (2019). The system collected information such as throttle position, RPM, speed, and jerks through the OBD-II interface for real-time feedback that could create a fuel-lean and emission-free habit. The study identified throttle position as a key indicator of eco-driving behavior and employed a game-based scoring system to reinforce sustainable driving practices.
Studies Young et al. (2020); Sik et al. (2017); Signoretti et al. (2019); Tapak et al. (2023) introduced diverse tools and frameworks for enhancing vehicle data analysis and eco-driving practices using OBD-II, CAN bus, and telematics within smart and sustainable transportation systems. In Sik et al. (2017), “ObdCanCompare” is introduced as a tool for collecting and comparing data from both OBD-II and CAN bus interfaces using a smartphone, finding that CAN bus’s higher sampling frequency (up to 5 Hz) offers an advantage over OBD-II’s 1 Hz for driving-related decisions. The authors also developed a Social Driving app that ranks drivers on eco-driving metrics like GPS location, speed, fuel consumption, and CO2 emissions, with companies offering rewards based on driver performance. Study Signoretti et al. (2019) explored an autonomous Edge OBD-II device for real-time vehicle data collection, highlighting how varying PID response times across vehicles suggested a need for vehicle-specific data processing to support Industry 4.0 and improve decision-making. In Young et al. (2020), Roger Young et al. discussed vehicle telematics in the context of intelligent cities focusing on OBD-II and fleet management system (FMS) standards for data extraction. They discovered that while OBD-II is more easily accessed, FMS provides finer information suitable for fleet management. Their analysis has again highlighted the telematics role in emissions reduction and urban sustainability via eco-driving. Finally, Tapak et al. (2023) examined discrepancies in fuel consuming measurements derived from on-board fuel consumption meters (OBFCMs) among about 1000 vehicles, reporting hybrid vehicles surprisingly consuming more fuel. By using a cost-effective OBD reader and mobile app, this study highlighted OBFCMs’ potential to improve energy efficiency monitoring and regulatory insights, aiding sustainable transportation efforts through real-world fuel consumption analysis.
Studies Maldonado and Bennabi (2018); Wang et al. (2022); Lin et al. (2024) focused on predictive models and monitoring systems that link vehicle parameters, emissions, and driving behaviors to support eco-driving and regulatory compliance. In Maldonado and Bennabi (2018), a model using OBD and Arduino sensors was developed to investigate relationships between vehicle internal parameters, such as vehicle’s speed, RPM, and exhaust emissions. Although the study found low predictive accuracy, with adjusted R-squared values around 0.1, it emphasized the need to understand these parameter-emission connections to advance eco-driving strategies. Study Wang et al. (2022) examined NOx emissions from heavy-duty vehicles (HDVs) using OBD data in the context of China’s China VI emission standards. Findings revealed a 64% reduction in NOx emissions for China VI-compliant vehicles compared to China V, with adjustments for idling and cold starts enhancing data accuracy. The study projected that full adoption of China VI standards by 2023 could prevent over 1.7 million tons of NOx emissions, showcasing OBD data as a practical tool for real-time emission monitoring. In Lin et al. (2024), a system integrating emissions data with driving behavior was presented using an Exhaust Extraction Device (EED) and an upgraded OBD-II module. It has linked the pollutants such as CO2 and NOx with some metrics such as engine RPM to showcase the effect of driving behavior on emissions. A lightweight and cost-effective alternative to traditional portable emission measurement systems, this enabled real-time tracking of emissions while providing eco-driving feedback through mobile and backend integration.
5.1.2. Eco Routing
Eco-routing is a strategy that can be utilized to identify routes that offer the most fuel-efficient travel of vehicles, focusing on fuel consumption minimization as well as GHG reduction Ding et al. (2017). This is particularly important in relation to the kind of road which is selected and can be, for example, highways that tend to operate smoothly and without much stopping in comparison with urban streets and country roads, which reduces fuel consumption because of its effects on vehicle emissions. Being more fuel-efficient routes also contributes significant environmental protection measures since fuel consumption correlates highly with pollutant emissions; thus, carbon and air pollution reduce significantly Jacobson and McLay (2006); Shang et al. (2014); Zhang et al. (2015). Of primary importance in eco-routing is the form of modeling and estimating fuel consumption for a particular road concerning many factors such as road type, traffic condition, and vehicle parameters. Integrating this into a navigation system would help eco-routing drivers in making informed decisions which can be an advantage in being beneficial to the environment while saving fuel. Thereby, this provides assistance from using eco-routing technology to utilize emission-saving travel by drivers.
Studies Ding et al. (2017); Chen et al. (2020); Waltereit et al. (2019); Chen et al. (2016) presented various systems to optimize route planning and fuel efficiencies to earn more for the driver and motivate eco-friendly driving from data-driven insights. ProfitMax was introduced in Chen et al. (2020) as a recommendation system for taxi route maximization on profit-generating productivity through balancing time efficiency with fuel consumption. ProfitMax allows slight deviations from the route to save time without significantly raising fares and shows a 10% reduction in fuel consumption and a considerable increase in income when tested against real-life data. Study Waltereit et al. (2019) proposed an algorithm that reconstructed traveled routes without GPS, relying solely on smartphone accelerometer and gyroscope data to calculate distances and turns. This method achieved 78% accuracy in route reconstruction within a 1200 km² area, with a 95.5% accuracy among the top five suggested routes. In Ding et al. (2017), a two-phase framework was outlined for optimizing fuel consumption, beginning with a Personalized Fuel Consumption Model (PFCM) based on driving behaviors and road conditions. Integrating real-time traffic data in the second phase, this system, tested with taxi data in Beijing, showed a potential 20% fuel savings with route prediction errors under 7% over distances of 10 km or more. Finally, Chen et al. (2016) presented EasyRoute, a smartphone-based route recommendation system that used an OBD-II adapter to create personalized fuel consumption profiles. EasyRoute leveraged crowdsourced traffic data to recommend the most fuel-efficient routes, achieving predictions with 30% less relative error compared to baseline models, enhancing route and fuel efficiency for drivers.
Table 6.
Component breakdown of smartphone-based vehicle telematics solutions. The definition of the parameters is shown in Table 5.
Table 6.
Component breakdown of smartphone-based vehicle telematics solutions. The definition of the parameters is shown in Table 5.
| Study | OBD-II Parameters | Smartphone Parameters | ML/DL Techniques | Application Layer | Application |
|---|---|---|---|---|---|
| Yao et al. (2020) | T, GPS(x,y,z), VSS, RPM, Trq, SAC, O2, IFC | T, GPS(x,y,z), SE, GPS speed, ACC(x,y,z), AcA(x,y,z) | RF | Cloud | Eco driving |
| Meseguer et al. (2017) | VSS, ACC, RPM, mass MAF, MAP, AIT | GPS, ACCM | NN | Remote Data Center | Eco driving |
| Shaw et al. (2019) | VSS, MAF, FL | T, ACC, GPS | – | – | Eco driving |
| Nousias et al. (2019) | B, SUE, RPM, CR, FC, GC, ACC | GPS | – | Spark Works Cloud | Eco driving |
| Massoud et al. (2019) | TP, RPM, VS, JK | GPS | – | – | Eco driving |
| Vdovic et al. (2021) | CEL, RPM, VS, TP, FTL, RTP, ATP B, ATP C, ATP D, APP E, APP F, Relative APP, EFR | ACCM, GYR, uncalibrated GYR, MF, uncalibrated MF, RV, GRV | – | – | Eco driving |
| Konstantinou et al. (2023) | FC, VSS, ACC, DEC, HE, SI, IP | ALT, SPS, ACCM, GYR, GPS | Gradient Boosting DT | Cloud | Eco driving |
| Wang et al. (2022) | AP, Lon, Lat, VSS, RET, RFT, RPM, EFR, FTL, ECT | – | – | Local | Eco driving |
| Lin et al. (2024) | RPM | – | – | Web server | Eco driving |
| Campoverde et al. (2023) | MAP, VSS, IAT | – | – | Local | Eco driving |
| De Rango et al. (2022) | VSS, ACC, JK, FC | – | – | Cloud | Eco driving |
| Rykała et al. (2023) | EL, RPM | GPS | NN | – | Eco driving |
| Tapak et al. (2023) | FC | – | – | Mobile app | Eco driving |
| Chen et al. (2020) | IVS, AFC, T | GPS | – | Local-Smartphone | Eco Routing |
| Ding et al. (2017) | D, VSS, FC | GPS | – | – | Eco Routing |
| Chen et al. (2016) | IVS, AM, AFC, T | GPS | – | Smartphone | Eco Routing |
| Meseguer et al. (2018) | VSS, RPM, TP, FC | GPS | NN | Web server | Driver safety (HR vs driving style) |
| El Mekki et al. (2019) | VSS, ALT, ACC, Roll, Pitch, Yaw, DAV, TIAV | – | FCN-LSTM | – | Driver Identification |
| da Silva et al. (2019) | ACC, B | ACCM, GPS, O | – | Cloud | Driver behavior/safety |
| Navneeth et al. (2020) | RPM, VSS, EL, TV | GPS | K-Means | – | Driver profiling and Diagnostics |
| Continue | |||||
Table 7.
Component breakdown of smartphone-based vehicle telematics solutions. The definition of the parameters is shown in Table 5.
Table 7.
Component breakdown of smartphone-based vehicle telematics solutions. The definition of the parameters is shown in Table 5.
| Study | OBD-II Parameters | Smartphone Parameters | ML/DL Techniques | Application Layer | Application |
|---|---|---|---|---|---|
| Khandakar et al. (2019) | VSS, RPM, BV | – | – | Local Smartphone | Driver safety/behavior |
| Nirmali et al. (2017) | ACC, VSS, TP, FL, RPM | – | Markov model, K-Means, Adaboost | Complex Event Processor | Driver safety/behavior |
| Husni and Boy (2018) | VSS, RPM | – | Fuzzy Logic | IBM Bluemix | Driver behavior |
| Hamid et al. (2019) | ECT, RPM, VSS, O2, MAF | GPS | – | Cloud database | Driver behavior |
| Sik et al. (2017) | RPM, VSS | – | – | Cloud | Driver behavior |
| Khan et al. (2022) | RPM, TP, SWA, ECT, VSS | ET, WS | – | SQLite database | Driver behavior/safety, mobile phone |
| Abdelrahman et al. (2018) | SHRP2 dataset | – | SVR | – | Driver profiling/behavior |
| Al-refai et al. (2024) | VSS, EL, ECT, MAP, RPM, MAF, IAT, AFC | ALT, LonA, VerA | ANN | Local | Driver behavior |
| Abdelrahman et al. (2020) | VSS, ACC, SWA | LonA, LatA, GPS, Cam | RF | Cloud | Driver behavior profiling |
| Adu-Gyamfi et al. (2023) | VSS, RPM, ECT | Cam | – | AWS Cloud | Driver behavior |
| Sutanto et al. (2020) | EC, TP, BV | GPS | – | nodeJs servers | Fleet management (tracking) |
| BULUT and ILHAN (2019) | VSS, RPM, EL | – | – | Cloud | Fleet management |
| Falco et al. (2019) | VS, RPM, M, FC, Acc AB, TM, RLC | GPS | – | AWS Cloud | Fleet management |
| Hasan and Al-Omary (2019) | VSS, RPM, FT, FE, FL | GPS, GYR, ACCM | – | Cloud | Fleet management |
| Bánhelyi and Szabó (2020) | VSS, RPM, ECT, FP, EL, TP, AFR | – | – | Local SP | Vehicle Diagnostics |
| Farrugia et al. (2016) | DP, RPM, APP, MAF, EGT | – | – | Smartphone | Vehicle Diagnostics |
| Kalmeshwar and Prasad (2017) | AAT, ECT, BP, FP, MAP, T, DN, OS, PC, ER | – | – | Data Cloud | Vehicle Diagnostics |
| Srividya et al. (2023) | HCV, VSS, BD | – | – | Smartphone app | Vehicle Diagnostics |
| Jung et al. (2024) | VSS, MAP, EP, RP, APP, ECT, CEL, T, FTL | – | – | Smartphone app | Vehicle Diagnostics |
| Giron et al. (2023) | VSS, SOC, BV, BC, BT, BCL, MT | – | – | Android Tablet | Vehicle Diagnostics |
| Witaszek and Witaszek (2023) | RPM, ECT, VSS, FRP, TP, MAP | ACCM, GPS, RTC | – | Smartphone app | Vehicle Diagnostics |
| Stathers et al. (2022) | VSS, ECT, IAT, RPM | – | – | Android tablet | Vehicle Diagnostics |
| Turk et al. (2018) | SWA | – | – | Smartphone | Route derivation (Parking) |
| Saufi et al. (2019) | MAF, ECT, EGT | – | – | Firebase | Fleet management (Car rentals) |
| Gupta et al. (2020) | ACCM, GYR, VSS | GPS | – | – | RPCM (Road grade estimation) |
| Waltereit et al. (2019) | VSS | ACC, GYR | – | – | Route derivation |
| Kyriakou et al. (2019) | VSS | ACCM, GYR, AcA | ANN | – | RPCM (Pothole detection) |
| Hou et al. (2017) | VSS, RPM | T, ACC | – | Remote Server | RPCM (Slippery road detection) |
| Ashwini et al. (2020) | APP, RPM, VSS | IMU, Cam, BT | CNN | – | RPCM (Pothole detection) |
| Li et al. (2018) | VSS, APD, RPM, AEL, CEL | IRI, Lon, Lat, Alt, GPS | – | – | RPCM (Noise estimation) |
| Sohail et al. (2019) | VS, RPM, FF, MAF | T, GPS-Lat, GPS-Lon | – | AWS Cloud | Road Network Inefficiencies |
| Rocha et al. (2023) | VSS, RPM, EL, AAT, TP, AP, SWA, RPM, HS, WS, BPP | GYR, ACCM, MAG, AP, ALT, ILM, PED | – | Cloud | Road Network Inefficiencies |
| Kyriakou and Christodoulou (2022) | VSS | GPS(x,y,z), ACCM, GYR | K-means, K-medoids, Fuzzy, GMM | Data server | RPCM |
| Singh and Singh (2022) | VSS, ACC, FCR | ACCM | – | Android app | Driver Safety |
5.1.3. Drive Behavior
Driver behavior profiling through vehicle telematics has gained significant importance, driven by the need to improve road safety and reduce environmental impact. Insurance companies are increasingly using smartphone apps equipped with sensors like accelerometers, magnetometers, and GPS to monitor driving habits Nirmali et al. (2017). These systems track unsafe behaviors such as speeding, distraction, and aggressive driving, all of which are major contributors to road accidents. According to the National Crime Records Bureau (NCRB) in India, over 80% of road fatalities are attributed to negligence by drivers, indicating the importance of vehicle telematics in identifying risky driving behaviors and providing feedback for encouraging safer driving Navneeth et al. (2020). Apart from safety, driver behavior profiling is also tied to environmental impacts, given that modern ITS objectives focus on emission reductions. It was also confirmed by the literature that driving style highly influences fuel economy and pollution level. Accelerations, velocities, braking, idle-time and other similar behaviors which influence fuel rates are the direct indicators of fuel efficiency and emissions. In contrast to traditional methods of evaluating drivers, telematics allows for the categorization of drivers and focuses on specific behavioral patterns in order to achieve increased driving effectiveness, decrease fuel usage and decrease the negative impact on the environment. This makes vehicle telematics not only an effective means to increase road safety, but also a method to encourage drivers choose options that are less harmful to the environment.
Studies Abdelrahman et al. (2020); Tsai et al. (2017); Li et al. (2019); Shaily et al. (2021), and Kalgal et al. (2017) present different possible ways of evaluating and enhancing driving protection and efficiency in risky situations and reducing the negative impact on the environment by examining driving manner and behavior. Nine dangerous driving behaviors was mathematically characterized in Tsai et al. (2017) and it provided the foundation on driver alert system that incorporates image, location and motion data analysis modules to identify risky habits. This integrated approach generated real-time records of unsafe driving behaviors. Study Li et al. (2019) introduced a risk assessment solution specifically for HAZMAT drivers, validated through two months of naturalistic data from 39 drivers and assessed with the Analytic Hierarchy Process-Entropy Weight method to provide an objective safety measure. In Shaily et al. (2021), a driver drowsiness detection solution was proposed, combining OBD-II data and a dashboard-mounted camera to monitor driver alertness and issued warnings as needed. Research paper Abdelrahman et al. (2020) presented a framework using data from the Strategic Highway Research Program 2 (SHRP2) to evaluate driver risk profiles by analyzing crash events, near-misses, and routine driving. With machine learning models like RF and Deep Neural Network (DNN), the framework identified 13 behavior-based predictors of driver risk, with RF achieving the highest accuracy. This framework was proposed as a cloud-based tool for real-time driver risk profiling, which could benefit insurance and fleet management sectors. Finally, Kalgal et al. (2017)) focused on developing a realistic driving cycle for India, utilizing Commercially-Off-The-Shelf (COTS) hardware via OBD ports and IoT for data storage, aiming to improve emissions testing and fuel efficiency for light vehicles. This study underscored the impact of driving style on fuel consumption, especially for hybrid and EV vehicles, and advocated for an open-source, affordable prototype to advance sustainable urban transportation in India.
Studies Husni and Boy (2018); Abdelrahman et al. (2018); Andria et al. (2015), and Jachimczyk et al. (2018) proposed innovative IoT-based and data-driven frameworks for monitoring and analyzing driving behaviors, emphasizing safety, risk assessment, and cost-effectiveness in automotive telemetry. In Husni and Boy (2018), an IoT-based driver attitude monitoring system was developed using fuzzy logic to analyze speed and RPM data from OBD-II. Data was transmitted to the IBM Bluemix server via a smartphone for further analysis, categorizing driver behavior into “good” or “bad” based on sample frequency, with average sample values providing the highest accuracy in identifying good behavior. In Abdelrahman et al. (2018), a data-driven framework was presented to calculate drivers’ risk scores for profiling applications using the SHRP2 NDS dataset.
Study used DT and SVR and concluded that while both models estimate risk scores, SVR provides better accuracy levels and that even the minimal event sampling provided good accuracy levels with SVR. Study Andria et al. (2015) presented a low-cost design for an automotive telemetry data acquisition system that utilizes OBD-II sensors, GPS and an Inertial Measurement Unit (IMU) interfaced with a Raspberry Pi. This versatility makes it possible to gather vast volumes of information regarding fleet monitoring and fault diagnosis, and to progress the development of economical vehicle data acquisition systems. Finally, Jachimczyk et al. (2018) presented a driving style assessment system aligned with the IoT reference model, structured into four layers: Sensing, Network, Application, and Business is the four-layer model of smart city. This system assessed driving style based on safety, economy, and comfort using data from OBD-II, an accelerometer, and GPS signal and ranked the driver on eight criteria. It was proved particularly in identifying qualities of a driver in treatments where visual representations, such as spider diagrams, helped in interpretation, to improve on driver safety in diverse transport settings.
Several research articles Hamid et al. (2019) and Ameen et al. (2021) proposethe d IoT-based based systems in monitoring drivers and their behavior for safety, insurance and traffic analysis. In Hamid et al. (2019), author presented the Vehicle Monitoring and Analysis System (VMAS) which IoT-based system that analyzes ddriver behaviour using data obtained from OBD-II, an Android application and cloud storage. VMAS extracted data from the vehicle and produced alarm messages whenever it recognized excessive speeds or risky states of the vehicle ,such as overheating of the engine, oxygen sensor, or mass airflow sensor. The authors explained that VMAS could be used as a tool that insurance companies and/or transportation authorities can use assess drivers’ behavior. Meanwhile, Ameen et al. (2021) proposed a classification system that categorized driving behaviors into four types: classified as dangerous, aggressive, safe, and normal, based on features extracted from acceleration and speed acquired from OBD-II and GPS. Statistical analysis revealed small differences of speeds detected by OBD-II and the speeds detected by the mobile applications, further indicating the effectiveness of the system. The study was intended to improve road safety by feeding drivers real-time information about their behavior with a view of modifying the behavior voluntarily and thereby possibly decrease on accident frequency.
Research papers identified in the field of driving behavior analysis employ vehicle OBD-II data and other sensors to observe and categorize this action, primarily for the purpose of improving safety on the roads and reducing fuel consumption. For example, Diego et al. (2020) developed an unsupervised K-means clustering method to categorize typical driving movements like starting, gear shift, and engine braking with OBD-II data. It created a way of categorizing driving behaviors, which gave indications on fuel usage and emissions, and its effectiveness in different car models. In Molina Campoverde et al. (2021), an approach for detecting braking and clutching were presented using signals like car speed and RPM, classification of behaviors during braking and gear change, and comparison of motorized and non-motorized approaches. Another study Al-refai et al. (2024) employed a cost-effective system using both OBD and smartphone sensors to classify driving styles and predict traffic conditions, utilizing artificial neural networks (ANNs) and SVM as baselines, with bagging techniques improving model accuracy for imbalanced data. The MobiScout application, discussed in Adu-Gyamfi et al. (2023), was a cloud-based tool that collects real-time data through smartphone sensors, smartwatches, and OBD devices, providing a cost-effective approach to naturalistic driving studies and enhancing understanding of driver behavior and health metrics. In Khan et al. (2022), the AutoLog framework focused on detecting smartphone usage while driving, identifying distractions such as texting or calling, which could lead to dangerous driving behavior. Lastly, a solution presented in Shaily et al. (2021) used image processing to detect driver fatigue and drowsiness, combining camera-based facial feature analysis and OBD-II data to monitor and alert drivers about fatigue, thus improving road safety, especially for fleet management.
5.1.4. Driver Safety
Driver safety is a core element of ITS, with vehicle telematics data offering significant benefits by monitoring drivers’ physical and mental states, including indicators of drowsiness, fatigue, and stress. Such systems provide real-time feedback and alerts, enhancing driver awareness and reducing accident risks. The data from vehicle telematics not only encourages responsible driving but also supports insurance policies that reward safer behavior, thereby reinforcing road safety and lowering environmental impact through reduced accident rates and emissions. Driver distraction, a prominent cause of accidents globally, accounted for 35% of crashes in Spain in 2015, with similar trends observed in Canada and the U.S., where distracted driving is linked to up to 25% of police-reported accidents Stutts et al. (2012). Distractions like phone usage, adjusting vehicle controls, or eating while driving, along with the driver’s emotional or physical state (e.g., stress or intoxication), can severely impact road safety. Mitigating these distractions is crucial for effective fleet management, shaping insurance policies, and promoting overall traffic safety.
Aggressive driving behaviors—including speeding, ignoring traffic regulations, and lane indiscipline—are associated with roughly one-third of vehicle accidents Li et al. (2019); Nath and Malepati (2018); Zualkernan et al. (2018); Singh et al. (2019). The likelihood of accidents for high-risk drivers is approximately every 50,000 miles, compared to every 500,000 miles for low-risk drivers Li et al. (2019); Aseervatham et al. (2016). Additionally, issues like driver fatigue, drowsiness, and distractions from mobile phone use further elevate the risk of on-road incidents Li et al. (2019); Nath and Malepati (2018). This growing concern has led to extensive research on driver safety solutions to address these factors effectively. Given the staggering global toll of 1.3 million road accident deaths Nath and Malepati (2018); Wahl et al. (2016), the need for prompt Emergency Medical Services (EMS) is critical. Various accident detection and notification systems have been developed, as detailed in studies Nath and Malepati (2018); Nugroho et al. (2018). For instance, Nugroho et al. (2018) introduced a Car Data Recorder (CDR) to detect and report accidents, utilizing recorded vehicle data for post-accident analysis by authorities. Additionally, the system in Nath and Malepati (2018) identifies accidents by monitoring vehicle orientation, including roll, pitch, and abrupt movements, as well as airbag deployment data. These innovations underscore the importance of immediate accident response and data-driven insights to enhance post-crash analysis and preventive strategies.
In El Mekki et al. (2019) author proposed a model for driver identification and fingerprinting with the use of deep learning algorithm in connected cars. They proposed new driver identification model based on data obtained from smartphones and OBD-II, using Convolutional Neural Network (CNN), Recurrent Neural Networks (RNN) and Long Short-Term Memory (LSTM). They used cross-validation techniques which gave reproducible results when applied on realistic data. FCN-LSTM outperformed and achieved an accuracy of 89.86%, with UAH-Driveset dataset, 95.1% with Security Driveset dataset, 62.13% with OSF Multimodal dataset and 93.92% with HCILAB dataset. Furthermore, they implemented the model in Automotive Grade Linux Framework for driver classification and anti-theft system.
Many research studies in driving behavior analysis use combinations of vehicle diagnostic data and physiological or environmental sensors to assess and improve driver safety and road awareness. For example in Meseguer et al. (2018), the authors investigated the correlation between heart rate and driving behavior by developing an Android application that collected driver physiological data via a heart rate sensor and vehicle data using an OBD-II adapter. Their study spanned 14 routes totaling 6 hours and categorized data into urban, suburban, and highway environments, showing that aggressive driving behaviors can increase heart rate by 2.5% to 3% beats per minute. Another study Khandakar et al. (2019) introduced a hybrid solution, integrating hardware and software to monitor driving behaviors and manage smartphone usage, using OBD-II and accelerometer data. Their Android-based system restricts phone use once a speed threshold of 10 km/h is reached, helping reduce distracted driving. The study’s survey results suggested that while drivers, especially teenagers, are open to minimizing phone use, they still tend to respond to incoming messages or calls while driving. In Nirmali et al. (2017), a real-time driver behavior monitoring and alert system was presented, combining OBD-II data with smartphone sensors and a Complex Event Processor backend server for data processing. This system was utilizing a Markov model and k-means clustering to identify anomalous driving and the Adaboost algorithm to monitor safe driving with a 90% accuracy rate of detecting and notifying the driver on risky behaviors.
Several driving behavior and accident identification studies employ IoT enabled systems and vehicle attached sensors to increase safety, caution drivers and facilitate better approaches to handling accidents. For instance, da Silva et al. (2019) introduced "SmartDrive", an intelligent IoT system that alerts drivers to traffic risks and danger zones. They employ some features of smartphone sensors and connectivity to track different behavioral patterns like hard braking/acceleration and provide notifications in case the speed limit is breached. In the same way Lehoczký et al. (2022) proposed an accident detection and reporting system that was designed to overcome the shortcomings of current technologies and intended for actual implementation, rather than in a simulated environment. The work also talked about advancements in data communication with emergency services and cars, their diminishing sizes, and integration into various car models to improve the overall efficiency of accident response. Another study Singh and Singh (2022), employed G-force data from OBD-II and smartphone accelerometer to identify vehicular accidents and determined thresholds between collisions and minor vibrations to assist post-accident analysis. In Nugroho et al. (2018), the authors developed a CDR prototype to aid in traffic accident investigation by recording pre-incident vehicle conditions, such as gas pedal position and RPM, and using accelerometer data to detect accidents. This system provides real-time notifications to authorities upon detecting an accident, offering accuracy rates of 84.8% for RPM and 74.4% for vehicle speed. Another low-cost solution is presented in Nath and Malepati (2018), where a standalone system integrated an IMU, GPS, and Global System for Mobile Communications (GSM) module to detect accidents and notify EMS. Using jerk as a metric, this system determined crash severity and sent relevant details to EMS, providing an affordable solution for lower-end vehicles. These studies highlight the growing role of integrated sensor systems and IoT in advancing road safety and accident response.
In da Silva et al. (2019); Zualkernan et al. (2018); Hong and Park (2018), researchers proposed different solutions for improving driver’s contextual awareness of the surrounding environment. The objective was to let the driver take action accordingly. Hong et al. proposed a system’s architecture and functional blocks for a trust based services in connected cars environment Hong and Park (2018). Using data mining algorithms on OBD-II’s data, the system has the capability to predict dangerous driving behavior. Authors in da Silva et al. (2019); Zualkernan et al. (2018) presented the design of an intelligent IoT system capable of inferring and warning about road traffic risks and danger zones. This risk assessment is based on data obtained from vehicles and their driver’s smartphones, thus helping to avoid accidents and seeking to preserve the lives of the passengers. The study Zhang et al. (2018) developed a system that enables a car to communicate its own abnormal driving behavior to the other cars in the region while also receiving alerts about other drivers’ problematic driving behavior. Researchers designed a safety driving assistance system in Zualkernan et al. (2018) and it promptly alerts the driver when unsafe driving behaviors are observed.
Several recent studies leveraged IoT, OBD-II, and data analytics to enhance driver behavior profiling, vehicle maintenance, and prediction of dangerous driving behaviors. For instance in Navneeth et al. (2020), the authors developed an Android application for car self-maintenance and driver profiling by obtaining DTC and analyzing driver behavior. This system used two methods for profiling: one based on GPS coordinates and another on visual and analytical analysis of engine parameters like RPM, vehicle speed, engine load, and throttle valve position, utilizing machine learning and data analytics techniques. In another study, Hong and Park (2018) introduced a framework for analyzing and predicting dangerous driving behaviors by integrating IoT and OBD-II data through the SLICE engine, which enabled real-time context awareness and inference on IoT nodes. The system builds a DT model with the help of the Weka library with the accuracy of 95% in identifying hazardous driving behaviors without focusing on the excessive speed of the car. This framework is designed to improve safety and offer trustful services in connected car scenarios while classifying and predicting dangerous driving actions. All these studies evidence the capacity of utilizing IoT mechanisms in real-time and preventive driving analysis and control.
5.2. Fleet Management
Fleet management is another critical application of vehicle telematics within ITS. By collecting and analyzing data on vehicle usage, telematics systems can optimize fleet operations, improve fuel efficiency, and reduce maintenance costs. Advanced data analytics can provide insights into vehicle performance, enabling predictive maintenance and extending the lifespan of fleet vehicles.
5.2.1. Fleet Management
Fleet management encompasses comprehensive transportation management and monitoring, including for vehicles like cars, trucks, airplanes, and ships Backman et al. (2016). It is essential for companies that depend on transportation to mitigate risks related to vehicle investment and monitor driver behavior. Integral to fleet management is maintaining real-time insights into vehicle maintenance status, such as oil change schedules or impending Vehicle Technical Inspection deadlines, which supports managers in ensuring timely and safe operations Falco et al. (2019). Fleet management spans the entire vehicle lifecycle, from acquisition to disposal, with goals of enhancing operational efficiency, improving service quality, and reducing risks. Fleet managers face five key challenges in achieving effective fleet management: (1) driver behavior and safety, (2) fuel efficiency, (3) real-time tracking and theft prevention, (4) damage control, and (5) addressing theft and fraudulent insurance claims. However, advances in vehicle telematics are providing feasible solutions to these challenges. With telematics, real-time data on vehicle performance, location, and driver actions can be leveraged to optimize fleet operations, promote safety, and reduce costs, marking significant progress toward efficient fleet management.
Several studies introduced innovative ideas of fleet management based on OBD-II data, IoT, cloud computing, and other advanced technologies for vehicles’ supervision, drivers’ behavior, and optimisation of operational activities. In Sutanto et al. (2020), the authors developed an online FMS that combines the functions of OBD, IoT, and Cloud Computing with web and mobile Apps; Fleet managers are capable of tracking the position of vehicles in real time, gaining real time vehicle information, and analyzing the driving behavior of drivers. This system provides notifications and represents information that can enhance decision making. Likewise, Singh et al. (2019) designed and implemented an IoT cloud-based visual FMS to address real issues in the industry which include; safety and behavior of drivers. This solution combined the OBD data with pre-processing computer vision for improved monitoring and tracking such as; Lane Departure detection and Traffic Signal recognition. It also had face authentication and driving pattern analysis for the restricted use of the car and boost the safety of the company’s fleet. In BULUT and ILHAN (2019), the authors suggested a cloud architectural model for sharing of vehicle information in Industry 4.0 environment. This system which implements OBD-II, Smartphone and a cloud server transfer data using 4.5G technology and offered good information for a number of services such as usage history of the vehicle, fuel efficiency and real time road conditions. Another study, Pranjoto et al. (2017), described an OBD-II based system for General Packet Radio Service (GPRS) based fleet monitoring to capture and transmit data about the engine RPM, speed, and temperatures to a central database for Fleet maintenance and monitoring. Additionally, Malekian et al. (2016) developed a wireless OBD-II system for monitoring the speed, distance and fuel efficiency of vehicles. Information was transferred to a webserver using WiFi and the driver could navigate through the information using a GUI for real time analysis, GPS tracking for ITS development and getting a proper tool for fleet evaluation. Altogether, these works demonstrate the significance of combined OBD-II and IoT platforms in the context of the advanced fleet maintenance and increased operational security.
Many IoT solutions are being proposed to optimize car tracking, drive rental operations, and optimize fuel consumption in urban mobility services. For example in Saufi et al. (2019), the authors proposed the system known as the “ForRent” an android car rental application that dealt with car rental damage scams. It captures the physical and forensic state of the vehicle and leverages OBD-II data to create evidence for renters and rental businesses during a transaction. In another study, Vasconcelos et al. (2017) proposes an IoT system for real-time data acquisition of vehicles involved in goods distribution in urban areas, whereby WSN can be used to capture several parameters without a lot of cabling and hence costs are incurred. The above solution is advantageous to the logistics operators since it enhances the flow and flexibility in the performing commercial operations. Similarly, Husni (2017) proposed the VISCar system for car rental firms with real-time control of driving style and fuel rates. The IoT system of VISCar optimizes the fuel consumption by studying the utilization of the engine parameters such as the speed, throttle position and distance. The system thus assists the rental companies in generating specific reports on the driving practices with the aim of cutting on the fuel expenses and advancement in the techniques of handling vehicles. The success and feasibility reflected from these studies demonstrate that IoT and OBD-II have the capability and potential to improve car rental security, optimize urban logistics, and upgrade driving behaviors in a fuel-efficient manner, making a vast contribution to the IoT application in Auto and Fleet Management.
In Hasan and Al-Omary (2019) author proposed a solution for traffic management system based on cloud Vehicle Ad-Hoc Network (VANET) and smartphone. They proposed their solution for economic cars that do not have the capability to run VANET. Their hardware system consists of OBD-II, smartphone, and a cloud platform. They collected the data from OBD-II, VANET and smartphone and shared this data with another vehicle. Application server on cloud detected the nearby vehicle using GPS and if there was any traffic congestion problem, notification was generated to the driver for changing the route to avoid traffic congestion, and also to traffic police for managing the traffic.
Several recent studies highlight the use of IoT, OBD-II, and machine learning for enhancing vehicle monitoring, safety, and operational efficiency. For instance in Srinivasan (2018), the authors proposed a low-cost IoT-based automobile monitoring system that uses machine learning algorithms, such as K-Nearest Neighbors (KNN) and Naive Bayes (NB), to predict vehicle conditions like engine temperature and tire pressure. With a prediction accuracy of 93%, this system leverages OBD-II data and onboard sensors, aiming to improve vehicle diagnostics and support the development of connected cars. Future enhancements include scalability and mobile app integration for real-time monitoring. In Weis et al. (2017), an IoT system was developed to predict accidents, monitor vehicle emissions, optimize fuel consumption, and improve traffic management using OBD-II and smartphone applications. This system was structured into four layers: physical, processing, communication, and application, and utilizes technologies like Raspberry Pi and Android smartphones for real-time data transfer and visualization. The paper emphasized the potential of IoT systems to improve road safety, environmental sustainability, and transportation efficiency. Similarly, Alazawi and Al-Khayyat (2022) presented an IoT-based vehicle tracking system that used a Raspberry Pi, GPS, and GSM/GPRS technologies to monitor vehicle location and speed in real-time. By connecting to OBD-II, the system provided essential vehicle data and transmitted location information to a central server, enhancing vehicle management, safety, and efficiency. These studies underline the growing role of IoT and advanced technologies like machine learning and smartphone applications in improving vehicle diagnostics, road safety, and fleet management.
5.2.2. Vehicle Diagnostics
Human error and vehicular malfunctions are primary contributors to road accidents, with global road statistics indicating over 1.3 million fatalities and 50 million injuries annually Ameen et al. (2021); Nath and Malepati (2018); Wahl et al. (2016). Timely fault detection and preventive diagnostics in vehicles are crucial to mitigating these risks. Vehicle diagnostics involves a comprehensive evaluation—either manual or electronic—of a vehicle’s systems to detect potential faults. Modern vehicles are equipped with onboard computers that interface with diagnostic tools, making it easier to identify specific issues. Various research works Singh and Kathuria (2021a) have proposed diagnostic and maintenance solutions focused on monitoring critical vehicle parameters such as engine conditions, braking systems, steering, and airbag functionality. These systems continuously assess vehicle performance, issuing alerts when any parameter exceeds a predefined threshold. By enabling early detection of potential failures, these solutions are instrumental in supporting accident prevention efforts and promoting safer roadways.
Recent advancements in OBD-II data logging and analysis underscore its versatility in vehicle diagnostics, emissions monitoring, and maintenance optimization. For instance, Smith and Miller (2013) presented the design of an OBD-II data logger using Arduino, capable of streaming vehicle sensor and GPS data to a remote server. The device monitors the effects of climate, particularly cold conditions, on oxygen sensor performance, with applications in emissions analysis, maintenance planning, and road condition alerts. Its affordability and scalability suggest potential for widespread deployment, with future research aimed at better understanding vehicle emissions across diverse climates. Similarly, Farrugia et al. (2016) highlights the utility of OBD-II data and explored its integration with a UniNOx sensor to monitor NOx emissions. The authors developed a smartphone application to read and upload data to a project website, as well as vehicle emulators for testing, allowing them to simulate real-world conditions without relying on physical vehicles. This approach underscores the value of OBD-II data in environmental monitoring and vehicle diagnostics while enabling more flexible testing methodologies through emulation. Together, these studies demonstrate the potential of OBD-II technology to enhance vehicle monitoring, emissions management, and research adaptability.
Recent research has shown the value of integrating IoT with OBD-II systems to advance vehicle diagnostics, connectivity, and fault detection. For instance, Hamid et al. (2017) introduced a wireless engine diagnostic system that leverages IoT to address the limitations of traditional OBD-II setups. The system was structured into three stages: CAN-bus data collection, data conversion, and cloud transmission. Using Arduino and ESP8266, it reliably transmitted data to the cloud for real-time analysis, marking an improvement in vehicle monitoring. The authors suggested future work to enhance data management and security in CPS. Similarly, Bánhelyi and Szabó (2020) presented an automatic fault detection system using an Android application that reads vehicle data via OBD-II. The application analyzed sensor data, alerting the user to any detected faults, enhancing preventive maintenance for vehicles. Meanwhile, Kirthika and Vecraraghavatr (2018) developed a low-cost connected vehicle system using Raspberry Pi, Arduino, and Wi-Fi, creating a bridge between a vehicle’s OBD-II and a smartphone for vehicles without built-in connectivity. This system also incorporates additional sensor units to monitor systems not covered by the original OBD-II, allowing for comprehensive vehicle diagnostics. Furthermore, the system includes a driver assistance feature, such as a rear camera, to aid in driving and parking. Collectively, these studies illustrate the expanding role of IoT and connected systems in making vehicle diagnostics more accessible and real-time, ultimately contributing to enhanced vehicle safety and maintenance practices.
Table 8.
Component breakdown of smartphone-based vehicle telematics solutions. The definition of the parameters is shown in Table 5.
Table 8.
Component breakdown of smartphone-based vehicle telematics solutions. The definition of the parameters is shown in Table 5.
| Embedded Systems | Comm | OBD-II Parameters | Application Layer | Application | Study |
|---|---|---|---|---|---|
| RPi, MPU600 | Wi-Fi | VSS, RPM, ACC | Web server | Driver Behavior | Andria et al. (2015) |
| Arduino, MQ gas sensors | No | VSS, RPM, MAP, TPS, relative TPS, CO, CO2 | Local | Eco-Driving | Maldonado and Bennabi (2018) |
| Freematics ONE+ | – | VSS, RPM, MAP, TPS, ECT, O2, AAT, FTM | – | Driver Behavior | Diego et al. (2020) |
| Arduino Mega, sensors (vibration sensors) | Wi-Fi | VSS, RPM, MAF, AFR, IAT | ThingSpeak | Road Network Inefficiencies (bottleneck detection) | Zeb et al. (2022) |
| Freematics ESP32 OBD-II kit | Wi-Fi | VSS, RPM, EL | Local server | Driver Behavior | Ameen et al. (2021) |
| Freematics ONE+ | – | VSS, RPM, ECT, IAT, IMAP, O2, RPM, TPS, LTFT, STFT | Local | Driver Behavior | Molina Campoverde et al. (2021) |
| RPi 3, GPS Module | Cellular | VSS, RPM, EL, ACC, RJ, T, GPS | Cloud | Driver Behavior | Jachimczyk et al. (2018) |
| Freematics ONE+ | Cellular | VSS, RPM, EL, TPS, BV, MAF, MAP | AWS | Eco-Driving | Signoretti et al. (2019) |
| Freematics ONE V4 | Wi-Fi | VSS, RPM, IAT, EL, TPS | Firebase/ Mobile App | Driver Behavior | Kalgal et al. (2017) |
| AVL Device, FMS Gateway | Cellular | VSS, RPM, MAF, EL, IAT, IMAP, LS | Android App | Eco-Driving | Young et al. (2020) |
| Arduino Mega, ADXL345 accelerometer | Cellular | VSS, RPM, TPS, ECT, ABA, GPS | Local | Driver Safety | Nugroho et al. (2018) |
| Arduino ATmega328, IMU (BNO055) | Cellular | ABA, ACC, GYR | – | Driver Safety | Nath and Malepati (2018) |
| RPi 3, Pi camera | Wi-Fi | VSS, RPM, ECT, TPS, GPS | Android App | Driver Behavior | Shaily et al. (2021) |
| Tiny4412 board, SJ5000x cam, MPU-6050 | Cellular - 4G | VSS, RPM, TS, ACCM, GYR, GPS | Cloud Platform | Driver Behavior | Tsai et al. (2017) |
| ADAS | Cellular | VSS, L, T, M, near-crash events, cell-phone usage, driver distractions | Cloud Platform | Driver Behavior | Li et al. (2019) |
| RPi 3, Ultrasonic sensor, LCD | XBEE Pro 900HP | Local Monitoring Display | – | Driver Safety | Zualkernan et al. (2018) |
| Notebook Laptop | Wi-Fi | – | Local server | Driver Safety | Hong and Park (2018) |
| Raspberry Pi 4B+, PiCAN 3, Arduino, MPU9250 | Cellular | GPS, ACC (x,y,z), Inclination (x,y,z), VSS, RPM, APP, AAT | Web Server | Driver Safety | Lehoczký et al. (2022) |
| RPi 3 | Wi-Fi | VSS, TP, CP, V, ECT, CO2 emission, FL, GPS | Cloud/Android App | Fleet Management | Srinivasan (2018) |
| Carambola2 | Wi-Fi | VSS, DT, FC, MAF, GPS | Local Server | Fleet Management | Malekian et al. (2016) |
| RPi 3, DHT11, Reed switch, LDR, PIR, Logitech cam | Cellular | VSS, MAF, FL, GPS | IBM Bluemix | Fleet Management | Singh et al. (2019) |
| STM32F103 | BLE | MPU-6050, LDR, GPS | Cloud | Fleet Management | Vasconcelos et al. (2017) |
| RPi, 3G USB Modem | Wi-Fi | VSS, MAF, FL, GPS | IBM Bluemix/Android App | Fleet Management | Husni (2017) |
| RPi 3 | Cellular | – | Android App | Fleet Management | Weis et al. (2017) |
| RPi | Cellular | VSS, RPM, IAT, MAF, TPS, relative TPS, AP | Local Server | Fleet Management | Pranjoto et al. (2017) |
| RPi, SIM868, OBD-II, GSM, GPRS | Cellular | GPS, VSS, T | Web Server | Fleet Management | Alazawi and Al-Khayyat (2022) |
| Arduino Uno | Cellular | Oxygen sensor | Local Server | Vehicle Diagnostics | Smith and Miller (2013) |
| RPi 3 | Wi-Fi | Engine diagnostic data | Local Server/Android App | Vehicle Diagnostics | Moniaga et al. (2018) |
| Arduino Uno | Wi-Fi | VSS, RPM, MAP, IAF, EG, DT, FC | – | Vehicle Diagnostics | Wahl et al. (2016) |
| RPi 3 | Cellular | VSS, RPM, ERT, TT, DT, GPS | Firebase | Vehicle Diagnostics | Shetty et al. (2017) |
| RPi 3 | Wi-Fi | VSS, RPM, FM, AM, AEC, GPS | Web Server | Vehicle Diagnostics | Singh et al. (2021) |
| Arduino | Wi-Fi | RPM, MAP, LF, BP, ECT | Cloud Platform | Vehicle Diagnostics | Hamid et al. (2017) |
| Arduino Mega2560, RPi 3B, Pi Camera | Wi-Fi | VSS, RPM, ECT, TPS, GPS | Android App | Vehicle Diagnostics | Kirthika and Vecraraghavatr (2018) |
| RPi | Wi-Fi | VSS, RPM, ECT, EL, EOT, FP, BV | Cloud Platform | Vehicle Diagnostics | Patel and Gaikwad (2020) |
| OBD-II connector | Wi-Fi | OST, M, EOPT, EIT, ESN | – | Vehicle Diagnostics | Wei et al. (2020) |
| IN-VGM | Cellular | Autonomous vehicle parameters | Cloud Platform | Vehicle Diagnostics | Jeong et al. (2018) |
| RPi 3B+ | Cellular | VSS, RPM, ECT, LTFT, STFT | Cloud Platform/Mobile App | Vehicle Diagnostics | BinMasoud and Cheng (2019) |
Recent advancements in vehicle diagnostic systems emphasize the growing integration of OBD-II technology, cloud computing, and mobile applications for comprehensive vehicle monitoring. For example, Kalmeshwar and Prasad (2017) described an Android-based diagnostic system incorporating OBD-II, an Android application, and a cloud server. Here, the OBD-II collected vehicle data from the ECU, which was displayed on the Android application and sent to the cloud for storage and analysis, providing accessible real-time data to users. In Shetty et al. (2017), the authors developed a diagnostic solution that included a GPS and dashboard camera for added security and accident documentation. Their system, which integrates an OBD-II with an Android app and Firebase cloud storage, not only monitors vehicle health but also allows location tracking and video recording, enhancing both security and maintenance capabilities. Similarly, BinMasoud and Cheng (2019) presented an IoT-based vehicle monitoring system that uses an OBD-II scanner, a Raspberry Pi, and a cloud application. This system supports real-time and historical data tracking, delivering reports and diagnostics through a mobile app. By using cellular connectivity, it enables remote monitoring, improving safety through timely fault detection in the engine and cooling systems. In Moniaga et al. (2018), the use of a Raspberry Pi with OBD-II is highlighted for real-time diagnostics, with Bluetooth connectivity to an iSaddle OBD-II scanner. This setup takes advantage of the multitasking capacity of Raspberry Pi, offering efficient real-time diagnostics, which surpasses traditional Arduino-based systems for this purpose. Another cost-effective approach for EVs diagnostics is described in Giron et al. (2023), where the authors utilized an ESP32 interface and Android app for a low-cost OBD system focusing on battery and motor health. The proposed system, costing only $28, offers an affordable solution for monitoring battery parameters and motor performance in EVs, ensuring efficiency and safety. Finally, Witaszek and Witaszek (2023) investigated thermostat malfunctions using OBD data. By analyzing coolant temperature data via the ELM327 diagnostic tool, the study identified abnormal behaviors caused by faulty thermostats. The results confirmed that OBD data can effectively detect these issues, preventing potential engine damage and improving fuel efficiency. Together, these studies illustrate how integrating OBD-II with IoT, cloud services, and mobile applications is transforming vehicle diagnostics, providing accessible and real-time data that enhances vehicle safety, maintenance, and operational efficiency.
Several recent works are devoted to the design of cost-effective vehicle health management systems that utilize IoT and OBD-II to improve safety, especially in areas with high accident rates. For instance, Wahl et al. (2016) implemented a low-cost human adaptive technology vehicle health management system that helps to prevent traffic accidents due to malfunctioning of vehicles in real time. When the data from the OBD is supplemented with the data from other sensors, the system can watch various components of the automobile constantly and detect faults in time. This approach also ensures the safety of drivers than those who are in the field and helps to cut expenses that are used in vehicle maintenance thus making the vehicles more efficient on the roads. In Singh et al. (2021), an IoT-based diagnostic system was proposed with focus on the high rate of accident and incidents on the Indian roads. This system employed a Bluetooth-enabled Raspberry Pi and a vehicle diagnostics OBD-II technology for live condition monitoring. The system transmits fault codes to the drivers and informs them about certain problems that may cause accidents. This diagnostic solution wants to improve the operation and protection of vehicles through the use of IoT protocols, which is in harmony with revitalizing the necessity of lesser fatal accidents in the country. The two papers demonstrate the relevance of using affordable remote and smart diagnostic IoT devices for enhancing road safety by diagnosing and solving car health complications ahead of time. Since many of these systems address affordability and wide-spread application, they can be widely adopted in practice, which is highly effective for changing the trends in vehicular safety.
New research in the automotive digital investigations reveals novel methods of acquiring essential evidence from automobiles especially in traffic-related offenses and crimes. In Jung et al. (2024), the authors presented a detailed approach to automotive forensics analyzing data acquired from computationally well-primitive Android smartphones connected to automobiles through Bluetooth using OBD-II adapters. They identified three major data sources: Bluetooth HCI snoop logs and circular logs in Android, and diagnostic data of a specific application. In this way, in combination with all the above data, the study created an exhaustive timeline of the driver behaviors, which can be useful in some situations, such as, for instance, acts like vehicle- related crimes or traffic accidents. This work thereby provides a rationale for integrating a number of digital artefacts to enhance the forensic precision and offers a framework for data collation and examination in this fast-growing field of motor vehicle forensics. Similarly, Stathers et al. (2022) examined various affordable techniques for capturing digital evidence from the automotive systems, including the dashboard camera, ECU, and Android head-unit. The study used tools like the Autopsy and OBD Auto Doctor to extract data like location histories, speed, and performace, thus showing how such information can be useful in legal cases. It is also important to mention that this research focused on elevated tools and low demands on hardware, providing strategies for the law enforcement agencies to use in acquiring vehicle data without having to spend a lot of money. Such an approach allows for broader study, potentially leaving no stone unturned which could have led to crime, or which may have occurred because of it. As both papers have indicated, the increased application of digital forensics in vehicles demonstrates how incorporating advanced technology into a car can reveal vital evidence to aid criminal investigations.
Present studies present proven technologies on vehicle optimization, diagnostics, and maintenance to increase its efficiency, reliability, as well as decrease costs and overall expenses. In Jeong et al. (2018), Monkey King Evolutionary Algorithm is proposed as a novel memetic evolutionary framework for optimizing the vehicle navigation to minimize gasoline consumption. This algorithm was seen outperforming conventional path-finding algorithms such as A* and Dijkstra by providing more fuel-efficient choices. Furthermore, the paper proposes a CNN model with visual attention for the vehicle classification that provides the comparable performance with respect to the methods surveyed herein employing less computational resources compared to large-scale CNNs. Additionally, an automotive fault diagnosis system is established by means of Auto Associative Neural Networks and Adaptive Neuro Fuzzy Inferential System resulting in a decreased rate of false positives in diagnostics. Finally, a distributed consensus based progressive control approach is presented using the Radial Basis Function neural networks for the coordinated movement of non-holonomic autonomous mobile vehicles in assigned paths to improve vehicle independence and synchronization. Predictive models for oil properties are developed in Wei et al. (2020) for motor oil degradation by considering the specific driving parameters. Total acid number, oxidation onset temperature, and selected other chemical indices associated with oil degradation are discussed, and their relationship with such parameters as service time, mileage, and operating time are analyzed. Thus, it was determined that oil conditions can be accurately forecasted using linear models with R-squared exceeding 0.99, evidence of a high precision of the models. Crude obtained through testing on a range of different synthetic oils depicted somewhat unusual degradation characteristics, and therefore unusual attention should be paid to certain parameters to define when the oil should be changed. This research adds knowledge to the causes of oil degradation with respect to driving conditions and fills the gap of enhancing tailormade maintenance solutions that would improve on the durability and efficiency of car engines. All these papers point to the possibility of improving vehicular dynamics and performance as well as bringing in better predictive models that can help in the evolution of new forms of green and efficient transportation systems.
Technology such as Augmented Reality (AR) and indoor positioning innovations and technologies are used to improve electronic car diagnostics and navigation for the company while making the technologies more available and safer for consumers. In Srividya et al. (2023), to enhance the fault diagnosis in cars, an AR tool was implemented where the user interface of a mobile application is marked with faults. Based on the data received from the OBD-II system and CAN bus, the tool identifies problems in brake, tire, or some components of the automobile engine. The collected data is processed by an ESP32 microcontroller, which through Bluetooth communicates with an Android application implemented in Unity 3D, where the diagnostic data is mapped onto a model of a car. This interface will let users pinpoint possible problems and their causes easily. This may potentially diminish repair durations and boost road safety by correcting failures early. The AR-based diagnostic system in Patel and Gaikwad (2020) further explored IoT integration with vehicle diagnostics, utilizing a Raspberry Pi and OBD-II scanner. This, indeed, is a real-time based system that helps to display the health status of a vehicle and send alerts on important parameters using an AR app for timely maintenance of vehicles. Further, urgent issues related to that property are notified through an email, and users are informed of the required repairs. The next versions of this tool may be enriched with voice-controlled diagnostics and increased amounts of data from the sensors for a more engaging audience. For indoor navigation, Turk et al. (2018) proposed a proactive vehicle positioning system that can be applied to such places as parking lots where GPS can hardly be utilized. This system makes use of an OpenXC dongle which is inserted into the car’s OBD port and a smart phone application. To do this, the system collects data such as the angle of the steering-wheel, the current speed indicated by the odometer and gear/ignition status, it charts where the car has gone being enclosed spaces. This AR navigation solution enhances positioning decisions especially in GPS restrained environments and therefore provides real world uses for vehicle interior control. These AR applications demonstrate how digital interfaces can transform vehicular diagnostics and navigation, offering more accurate diagnostics in less elapsed time, while improving drivers’ awareness of surroundings in complicated situations
5.3. Infrastructure
Transportation and road networks are critical to a nation’s economy. Road accidents mostly resulting from aspects like carelessly driving, speeding or poor road network have dire consequences in terms of economic and social impacts Ashwini et al. (2020). The states of roads can be observed using vehicle telematics to identify suboptimal areas and potential risks of accidents allowing for the timely management of road conditions. Furthermore, increasing the level of knowledge among drivers about the relationship between the style of driving regarding fuel consumption and safe traffic conditions can result in reductions in cost and improved efficiency of traffic in general.
5.3.1. Road Pavement Condition
Evaluating road pavement reflects the condition or state of road with a view of enhancing the efficiency and safety of the roads. Telematics based solutions that have dedicated sensors within the vehicles are able to provide real time data on road conditions, helping authorities prioritize the need for repair and maintenance. This approach is highly preventive to road related mishaps and generally enhances driver’s experience on the road.
5.3.2. Road Network Inefficiencies
The latest work points to the application of CPS and Cooperative Intelligent Transport Systems (C-ITS) to mitigate traffic problems and increase road safety. In Zeb et al. (2022), the authors design a low-cost CPS that utilises OBD-II telematics for congestion identification and computation of the respective economic and environmental cost in terms of fuel consumption, time and CO2 emission. The system involves the vehicular data and GPS together; the data collected needs to be forwarded to the cloud for processing. During a five-day trial in Peshawar, it was established that evening bottlenecks were solely responsible for 51 percent of fuel consumption and half of the CO2 emissions, demonstrating the rational for applying real time traffic management. Similarly in Sohail et al. (2019), authors designed BotlnckDectr – a cloud-based platform for bottleneck identification that quantifies how bottlenecks affect travel time, fuel consumption, and emissions. As the system operates with an OBD-II device and AWS cloud services, vehicle data with GPS coordinates are logged and transmitted by an Android application. Some of these field tests showed that road infrastructure plays a huge role in congestion and that without adequate research on urban planning, fuel and emissions costs will continue. The paper Rocha et al. (2023) developed a modular structure of C-ITS that included OBD-II, CAN bus, and external sensors to support the vehicle and the cloud. On Bluetooth, Wi-Fi, and, or cellular networks, the developed system offers real-time alerts concerning the dangerous roads conditions. It is thus proven effective for weather and road application, which facilitates enhancement of Road Weather Models and other road safety features. Through these investigations, it is possible to see how telematics together with cloud-solutions can improve traffic flows as well as safety standards while also minimizing pollution and fuel wastage in context of city driving.
6. Challenges
This section addresses the Research Question (RQ2 and RQ3):
- RQ2 – To identify challenges in smartphone-based vehicle telematics in ITS.
- RQ3 – To identify challenges in cyber physical-based vehicle telematics in ITS.
There remain numerous improvements yet to be made and several problems to solve or take cognizance of in order for smartphone and CPS integrated vehicle telematics to reach their specialty potential within ITS.
6.1. Challenges in Vehicle Telematics
6.2. Real Time Data Transmission
Real-time data support is imperative for many types of vehicle telematics applications; however, real-time data communication is often jeopardized due to poor and unreliable cellular networks. It is a common process for vehicle data collection through an OBD-II adapter and its transmission to a smartphone, with the direct transmission to a remote server over the internet. The region that has limited cellular coverage which does not allow the data to be transmitted in real-time may result in delays or loss of data, so addressing this challenge will require very robust solutions that will allow continuing data transmission even when there is intermittent internet connectivity.
6.3. Data Granularity and Contextual Awareness
The merge of the smartphones with the OBD-II adapters can collect large amounts of data, but fail to take external contextual factors such as weather, traffic density, or road geometry into account which is important to model driving behavior and fuel consumption accurately. For example, a decrease in a driver’s speed in very heavy rain may be incorrectly interpreted as a form of cautious driving behavior, as opposed to being affected by a weather phenomenon. The limitations of this lack of context add complexity to the models and even lead towards incorrect conclusions Fafoutellis et al. (2020).
6.4. Data Security and Privacy
Transmitting vehicle-related data over the internet raises important issues about security and privacy Neilson et al. (2019). The systems for vehicle telematics generally include a wide range of sensitive personal information on the users, i.e., location and travel data; thus, such systems are attractive for cyber-attacks. Securing both the transmission and storage of this type of data has become very imperative, especially in scenarios where future mobility is said to involve useful connected and autonomous vehicle features. Hence, advanced security methodologies as well as comprehensive privacy safeguard measures need to be established to protect the telematics data of vehicles while ensuring that such data can only be accessed under very strict conditions and with user consent.
Table 9.
Key Challenges in Vehicle Telematics and Potential Mitigation Strategies
| Challenge | Description | Potential Mitigation |
|---|---|---|
| Limited Network Connectivity | Real-time telematics performance degrades under intermittent or poor cellular coverage, leading to data delays or loss. | Edge caching, V2X communication, LPWAN, delay-tolerant networking |
| Data Privacy and Security | Sensitive vehicle and driver data are vulnerable to unauthorized access and cyber-attacks. | Encryption, blockchain-based security, differential privacy, access control |
| Scalability and Data Management | Large-scale deployments generate massive data volumes that strain cloud infrastructures. | Edge/fog computing, scalable cloud analytics, big-data frameworks |
| Data Quality and Device Variability | Heterogeneous smartphones and OBD-II adapters introduce inconsistencies in data accuracy and sampling. | Device calibration, standardized validation, sensor fusion techniques |
| Contextual Awareness | Lack of external context (weather, traffic, road geometry) may lead to incorrect behavioral interpretations. | Multi-source data fusion, contextual sensing, AI-based inference models |
| Data Synchronization | Misalignment between sensor data streams (e.g., GPS and OBD-II) reduces analytical accuracy. | Time-stamping, synchronization algorithms, sensor alignment protocols |
| Energy Consumption | Continuous sensing and communication drain batteries in mobile and embedded systems. | Low-power processors, adaptive sampling, energy-efficient protocols |
| Standardization and Interoperability | Proprietary telematics solutions hinder seamless data exchange across platforms. | Unified standards, open APIs, cross-vendor interoperability frameworks |
6.5. Data Management and Scalability
The vehicle telematics systems are generating huge data that are very difficult to manage and scale. A fleet management application covering ten vehicles generates about 300 GB of data per day, totalling around 9 TB per month. The managing, storing, and analysing that amount of data would require the use of big data paradigms. Despite having explored various big data-based approaches and analytics techniques for this challenge, there is still a need for further improvement toward more efficient and scalable solutions to manage an increased data influx Zhu et al. (2018); Neilson et al. (2019); Kaffash et al. (2021).
6.6. Data Robustness and Device Variability
Really naturalistic driving experiments, which are the most effective among all methods of acquiring actual driving behavior and fuel consumption data, are quite often confronted with the problem of data robustness. The data may vary in quality and accuracy owing to the differences among various devices like smartphones and OBD-II adapters. Drivers using different smartphones cause incongruences in data collection thus making it hard to achieve uniformity and reliability in the data obtained. One of the ways to solve these issues would be standardizing the devices used in such experiments or validating accuracy of such devices among all participants Fafoutellis et al. (2020).
6.7. Data Availability and Representativeness
A most challenging aspect of vehicle telematics research is the availability of large representative datasets. Most studies conduct their research using smaller samples, frequently fewer than 100 drivers, since experimentation is very costly and participants tend to be averse to being monitored. This has a significant effect on the statistical power of studies, while questions arise regarding the generalization of the data. Hence, large and diverse datasets should be collected that represent a broader spectrum of driving behavior in order to formulate driver behavior models that can be generalized Piotr et al. (2015).
6.8. Data Synchronization
It is another greatest challenge that may be data synchronization when data generated from different sources, e.g., OBD-II and GPS. Proper synchronization is important for event research on the driving situation, for instance, overtaking, intersections, and vehicle positions. Any variations in timing during reported data from said sensors result in inaccuracy. For instance, GPS data delays such as in comparison with OBD-II merely create a skewed picture of analyses carried out. An accurate synchronization of such data streams is, therefore, a prerequisite for a very high accuracy in vehicle telematics applications Rodrigues et al. (2011).
6.9. Sensor Limitations
Sensor limitation in vehicle telematics is further complicated by the fact that they are mostly designed to include low-complexity sensors such as GPS. For instance, if there are tunnels or urban canyons formed between tall structures, GPS sensor signals will be lost Carsten et al. (2013). Furthermore, the use of additional sensors, such as high-resolution cameras, can increase system complexity and cost, while smartphone cameras remain impractical due to power consumption and mounting issues Engelbrecht et al. (2015). The comprehension and resolution of sensor limitations have a major role to play in improving vehicle telematics reliability and effectiveness.
6.10. Power Consumption
Power consumption is a major challenge in intelligent vehicle systems, including the sensors and smartphones that are used for telematics AbuAli (2015). Most sensors are power-hungry in operation, which leads to speedy draining of the batteries for the vehicle or the device. Particularly, in the cases of smartphone-based systems, such features adversely affect battery life. Hence, low-power solutions or integration with outside power sources are needed to continuous operation of these systems without losing utility.
7. Future Directions
Vehicle telematics has already demonstrated clear benefits in areas such as eco-driving, routing optimization, fleet management, and vehicle diagnostics. Nevertheless, several promising research opportunities remain insufficiently explored. This section discusses potential future directions for vehicle telematics research within Intelligent Transportation Systems (ITS), addressing Research Question (RQ4).
7.1. Improving Road Network Efficiency
One important direction for future research is the use of large-scale telematics data to better understand road network efficiency. While previous studies have investigated bottleneck detection and associated costs in terms of emissions, fuel consumption, and travel delays Sohail et al. (2019), these efforts have typically been limited in spatial or temporal scope. With the increasing availability of connected vehicles, telematics data could be used to continuously assess link resistance across entire urban networks, enabling more informed traffic management and infrastructure planning.
7.2. Road Pavement Condition Assessment
Another promising area involves the monitoring of road pavement conditions using vehicle-mounted sensors. The impact of pavement quality on traffic flow and safety is well established Shen (2017); Khan et al. (2022). Recent work has begun to explore the integration of telematics platforms with inertial sensors and machine learning techniques Chhabra and Singh (2021); Ranyal et al. (2022). Further research is needed to improve the robustness and real-time reliability of such systems, particularly under diverse road and weather conditions.
7.3. Hardware Miniaturization and Compatibility
From a system design perspective, future work could focus on developing more compact and vehicle-independent telematics hardware. Although Raspberry Pi–based solutions have proven effective, their practical deployment is still constrained by installation complexity and limited compatibility with different vehicle models. Addressing challenges related to non-standard OBD implementations and manufacturer restrictions would significantly enhance real-world applicability Lehoczký et al. (2022).
7.4. Driving Behavior and Emission Reduction
Driving behavior plays a critical role in vehicle emissions and fuel efficiency. While existing studies have shown promising results, larger and more diverse datasets are required to establish reliable correlations between driving patterns and emission levels. As telematics deployments expand, data-driven models may support more precise and actionable recommendations for environmentally sustainable driving practices Lin et al. (2024).
7.5. Cost Efficiency and Electric Vehicle Support
Future research should also consider cost-effective system designs, particularly for electric vehicles (EVs). Optimizing performance while preserving battery health remains challenging due to limitations in automotive-grade microcontrollers and hardware certification requirements. In addition, extending mobile application support beyond Android to include other operating systems would broaden accessibility and user adoption Giron et al. (2023).
7.6. Multimodal Data and Advanced Learning Models
Although the fusion of OBD data and smartphone sensors has enabled several predictive applications, further improvements may be achieved by incorporating additional sensing modalities such as cameras or radar. Moreover, temporal deep learning models, including recurrent and long short-term memory networks, offer opportunities to better capture complex driving dynamics and evolving traffic conditions Al-refai et al. (2024).
7.7. Telematics for Urban Planning and Simulation
Telematics data also has the potential to enhance traffic modeling and simulation tools used in urban planning. Platforms such as VISSIM and SUMO often rely on simplified assumptions regarding driver behavior and road usage Ali et al. (2022); Khan et al. (2022). Integrating real-world telematics data could improve calibration accuracy and lead to more realistic simulation outcomes.
7.8. Context-Aware Modeling Across Road Environments
Future studies may benefit from explicitly considering road context, such as urban versus rural environments. Developing separate models for different road types, while incorporating external factors like congestion levels, could lead to improved predictive performance and generalizability Konstantinou et al. (2023).
7.9. Resilience in Dynamic Network Conditions
Vehicle telematics systems must also operate reliably in environments with intermittent connectivity. Edge computing approaches, local data buffering, and vehicle-to-vehicle or vehicle-to-infrastructure communication can help mitigate disruptions and ensure continuity of data collection and analysis.
7.10. Scalability and Smart City Integration
As telematics deployments scale, interoperability and data management become increasingly important. Future work should explore closer integration with smart city infrastructures, supported by standardized data formats and scalable analytics frameworks, to enable city-wide intelligent transportation services.
7.11. Energy-Aware Telematics Systems
Finally, energy efficiency remains a key concern, particularly for mobile and embedded platforms. Continuous sensing and data transmission can significantly affect battery life. Adaptive sampling strategies, low-power communication protocols, and intelligent power management mechanisms represent promising directions for future research.
In summary, while vehicle telematics has already contributed meaningfully to ITS applications, continued research across these areas is essential to unlock its full potential and support more efficient, safe, and sustainable transportation systems.
7.12. Summary of Future Research Directions
Table 10 summarizes the key future directions, challenges, and expected benefits of vehicle telematics research.
In summary, while vehicle telematics has already made significant contributions to ITS, addressing these future research directions will be essential to fully realize its potential in improving efficiency, safety, and sustainability of next-generation transportation systems.
8. Limitations
This review focused on publications from Scopus and WoS (2018–2024), potentially missing relevant studies in IEEE Xplore, Google Scholar, and other sources. Selection biases may exist due to small sample sizes, geographic constraints, or methodological differences. The review primarily covers smartphone- and cyber-physical-based telematics, potentially overlooking emerging technologies such as edge computing, V2X communication, and decentralized architectures.
9. Conclusions
Vehicle telematics has emerged as a transformative technology within ITS, enhancing road safety, driving efficiency, and environmental sustainability. Applications like driver behavior profiling, eco-driving, and real-time safety monitoring provide actionable insights for drivers and fleet managers, optimizing traffic and reducing emissions. Future research in areas such as road network efficiency, pavement monitoring, urban traffic simulation, and energy-aware systems will be crucial for building smarter, safer, and more sustainable transportation. Continued innovation is key to fully realizing the potential of vehicle telematics and addressing the evolving challenges of modern mobility.
Conflicts of Interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
References
- Young, R., S. Fallon, P. Jacob, and D. O’Dwyer. 2020. Vehicle telematics and its role as a key enabler in the development of smart cities. IEEE Sensors Journal 20: 11713–11724. [Google Scholar] [CrossRef]
- Malekian, R., N.R. Moloisane, L. Nair, B.T. Maharaj, and U.A. Chude-Okonkwo. 2016. Design and implementation of a wireless OBD II fleet management system. IEEE Sensors Journal 17: 1154–1164. [Google Scholar] [CrossRef]
- Haydari, A., and Y. Yılmaz. 2020. Deep reinforcement learning for intelligent transportation systems: A survey. IEEE Transactions on Intelligent Transportation Systems 23: 11–32. [Google Scholar] [CrossRef]
- Ameen, H.A., A. Mahamad, S. Saon, M. Ahmadon, and S. Yamaguchi. 2021. Driving behaviour identification based on OBD speed and GPS data analysis. Advances in Science Technology and Engineering Systems Journal 6: 550–569. [Google Scholar] [CrossRef]
- Chatterjee, P., and P. Madhavan. A Review on improved driving efficiency by leveraging smartphone sensors in India. In Proceedings of the 2022 8th International Conference on Smart Structures and Systems (ICSSS). IEEE, 2022, pp. 1–9.
- Zaidan, R.A., A.H. Alamoodi, B. Zaidan, A. Zaidan, O.S. Albahri, M. Talal, S. Garfan, S. Sulaiman, A. Mohammed, and Z.H. Kareem. 2022. Comprehensive driver behaviour review: Taxonomy, issues and challenges, motivations and research direction towards achieving a smart transportation environment. Engineering Applications of Artificial Intelligence 111: 104745. [Google Scholar] [CrossRef]
- Singh, H., and A. Kathuria. 2021. Analyzing driver behavior under naturalistic driving conditions: A review. Accident Analysis & Prevention 150: 105908. [Google Scholar] [CrossRef]
- Singh, H., and A. Kathuria. 2021. Profiling drivers to assess safe and eco-driving behavior–A systematic review of naturalistic driving studies. Accident Analysis & Prevention 161: 106349. [Google Scholar]
- Fafoutellis, P., E.G. Mantouka, and E.I. Vlahogianni. 2020. Eco-driving and its impacts on fuel efficiency: An overview of technologies and data-driven methods. Sustainability 13: 226. [Google Scholar] [CrossRef]
- Ziakopoulos, A., D. Tselentis, A. Kontaxi, and G. Yannis. 2020. A critical overview of driver recording tools. Journal of safety research 72: 203–212. [Google Scholar] [CrossRef]
- de Oliveira, L.P., M.A. Wehrmeister, and A. de Oliveira. Systematic literature review on automotive diagnostics. In Proceedings of the 2017 VII Brazilian Symposium on Computing Systems Engineering (SBESC). IEEE, 2017, pp. 1–8.
- Engelbrecht, J., M.J. Booysen, G. van Rooyen, and F.J. Bruwer. 2015. Survey of smartphone-based sensing in vehicles for intelligent transportation system applications. IET Intelligent Transport Systems 9: 924–935. [Google Scholar] [CrossRef]
- Shamseer, L., D. Moher, M. Clarke, D. Ghersi, A. Liberati, M. Petticrew, P. Shekelle, and L.A. Stewart. 2015. Preferred reporting items for systematic review and meta-analysis protocols (PRISMA-P) 2015: elaboration and explanation. Bmj 349. [Google Scholar] [CrossRef] [PubMed]
- Molina Campoverde, P.A., N.D. Rivera Campoverde, G.P. Novillo Quirola, and A.K. Bermeo Naula. Characterization of braking and clutching events of a vehicle through OBD II signals. In Proceedings of the Systems and Information Sciences: Proceedings of ICCIS 2020. Springer, 2021, pp. 134–143.
- Zhu, L., F.R. Yu, Y. Wang, B. Ning, and T. Tang. 2018. Big data analytics in intelligent transportation systems: A survey. IEEE Transactions on Intelligent Transportation Systems 20: 383–398. [Google Scholar] [CrossRef]
- Sohail, A.M., K.S. Khattak, A. Iqbal, Z.H. Khan, and A. Ahmad. Cloud-based detection of road bottlenecks using OBD-II telematics. In Proceedings of the 2019 22nd international multitopic conference (INMIC). IEEE, 2019, pp. 1–7.
- Vdovic, H., J. Babic, and V. Podobnik. 2021. Eco-efficient driving pattern evaluation for sustainable road transport based on contextually enriched automotive data. Journal of cleaner production 311: 127564. [Google Scholar] [CrossRef]
- Yao, Y., X. Zhao, C. Liu, J. Rong, Y. Zhang, Z. Dong, and Y. Su. 2020. Vehicle fuel consumption prediction method based on driving behavior data collected from smartphones. Journal of Advanced Transportation 2020: 9263605. [Google Scholar] [CrossRef]
- Ding, Y., C. Chen, S. Zhang, B. Guo, Z. Yu, and Y. Wang. Greenplanner: Planning personalized fuel-efficient driving routes using multi-sourced urban data. In Proceedings of the 2017 IEEE International Conference on Pervasive Computing and Communications (PerCom). IEEE, 2017, pp. 207–216.
- Massoud, R., F. Bellotti, R. Berta, A. De Gloria, and S. Poslad. Eco-driving profiling and behavioral shifts using iot vehicular sensors combined with serious games. In Proceedings of the 2019 IEEE Conference on Games (CoG). IEEE, 2019, pp. 1–8.
- Nousias, S., C. Tselios, D. Bitzas, D. Amaxilatis, J. Montesa, A.S. Lalos, K. Moustakas, and I. Chatzigiannakis. 2019. Exploiting gamification to improve eco-driving behaviour: The GamECAR approach. Electronic Notes in Theoretical Computer Science 343: 103–116. [Google Scholar] [CrossRef]
- Beusen, B., S. Broekx, T. Denys, C. Beckx, B. Degraeuwe, M. Gijsbers, K. Scheepers, L. Govaerts, R. Torfs, and L.I. Panis. 2009. Using on-board logging devices to study the longer-term impact of an eco-driving course. Transportation research part D: transport and environment 14: 514–520. [Google Scholar] [CrossRef]
- Rykała, M., M. Grzelak, Ł. Rykała, D. Voicu, and R.M. Stoica. 2023. Modeling vehicle fuel consumption using a low-cost OBD-II interface. Energies 16: 7266. [Google Scholar] [CrossRef]
- Meseguer, J.E., C.K. Toh, C.T. Calafate, J.C. Cano, and P. Manzoni. 2017. Drivingstyles: A mobile platform for driving styles and fuel consumption characterization. Journal of Communications and networks 19: 162–168. [Google Scholar] [CrossRef]
- De Rango, F., M. Tropea, A. Serianni, and N. Cordeschi. 2022. Fuzzy inference system design for promoting an eco-friendly driving style in IoV domain. Vehicular Communications 34: 100415. [Google Scholar] [CrossRef]
- Shaw, S., Y. Hou, W. Zhong, Q. Sun, T. Guan, and L. Su. Instantaneous fuel consumption estimation using smartphones. In Proceedings of the 2019 IEEE 90th Vehicular Technology Conference (VTC2019-Fall). IEEE, 2019, pp. 1–6.
- Konstantinou, C., P. Fafoutellis, E.G. Mantouka, C. Chalkiadakis, P. Fortsakis, and E.I. Vlahogianni. Effects of Driving Behavior on Fuel Consumption with Explainable Gradient Boosting Decision Trees. In Proceedings of the 2023 8th International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS). IEEE, 2023, pp. 1–6.
- Campoverde, P.M., K. Benavides, F. Montenegro, and J. Molina. Fuel Consumption Analysis of an MPI Engine by Varying Fuel Type, Fuel Filtering, and Air Filter Employing a Full-factor Analysis. In Proceedings of the 2023 IEEE Seventh Ecuador Technical Chapters Meeting (ECTM). IEEE, 2023, pp. 1–6.
- Sik, D., P. Ekler, and L. Lengyel. 2017. Gamification and driving decision support using the sensors of vehicles and smartphones. Intelligent Decision Technologies 11: 423–430. [Google Scholar] [CrossRef]
- Signoretti, G., M. Silva, A. Dias, I. Silva, D. Silva, and P. Ferrari. Performance evaluation of an edge obd-ii device for industry 4.0. In Proceedings of the 2019 II Workshop on Metrology for Industry 4.0 and IoT (MetroInd4. 0&IoT). IEEE, 2019, pp. 432–437.
- Tapak, P., M. Kocur, and J. Matej. 2023. On-Board Fuel Consumption Meter Field Testing Results. Energies 16: 6861. [Google Scholar] [CrossRef]
- Maldonado, B., and M. Bennabi. 2018. Prediction model for pollutants with onboard diagnostic sensors in vehicles. International journal of machine learning and networked collaborative engineering 2. [Google Scholar]
- Wang, J., R. Wang, H. Yin, Y. Wang, H. Wang, C. He, J. Liang, D. He, H. Yin, and K. He. 2022. Assessing heavy-duty vehicles (HDVs) on-road NOx emission in China from on-board diagnostics (OBD) remote report data. Science of The Total Environment 846: 157209. [Google Scholar] [CrossRef] [PubMed]
- Lin, Y.C., S.C. Yang, S.C. Wu, and C.C. Chen. 2024. Developing a system for the real-time collection and analysis of mobile vehicle emission data. Results in Engineering 23: 102706. [Google Scholar] [CrossRef]
- Jacobson, S.H., and L.A. McLay. 2006. The economic impact of obesity on automobile fuel consumption. The Engineering Economist 51: 307–323. [Google Scholar] [CrossRef]
- Shang, J., Y. Zheng, W. Tong, E. Chang, and Y. Yu. Inferring gas consumption and pollution emission of vehicles throughout a city. In Proceedings of the Proceedings of the 20th ACM SIGKDD international conference on Knowledge discovery and data mining, 2014, pp. 1027–1036.
- Zhang, J., Y. Zhao, W. Xue, and J. Li. 2015. Vehicle routing problem with fuel consumption and carbon emission. International Journal of Production Economics 170: 234–242. [Google Scholar] [CrossRef]
- Chen, H., B. Guo, Z. Yu, A. Wang, and C. Zheng. 2020. The framework of increasing drivers’ income on the online taxi platforms. IEEE Transactions on Network Science and Engineering 7: 2182–2191. [Google Scholar] [CrossRef]
- Waltereit, M., M. Uphoff, and T. Weis. Route derivation using distances and turn directions. In Proceedings of the Proceedings of the ACM Workshop on Automotive Cybersecurity, 2019, pp. 35–40.
- Chen, H., B. Guo, Z. Yu, A. Chin, J. Tian, and C. Chen. Which is the greenest way home? A lightweight eco-route recommendation framework based on personal driving habits. In Proceedings of the 2016 12th International Conference on Mobile Ad-Hoc and Sensor Networks (MSN). IEEE Computer Society, 2016, pp. 187–194.
- Meseguer, J.E., C.T. Calafate, and J.C. Cano. 2018. On the correlation between heart rate and driving style in real driving scenarios. Mobile Networks and Applications 23: 128–135. [Google Scholar] [CrossRef]
- El Mekki, A., A. Bouhoute, and I. Berrada. 2019. Improving driver identification for the next-generation of in-vehicle software systems. IEEE Transactions on Vehicular Technology 68: 7406–7415. [Google Scholar] [CrossRef]
- da Silva, D.A., J.A.S. Torres, A. Pinheiro, F.L. de Caldas Filho, F.L. Mendonça, B.J. Praciano, G. de Oliveira Kfouri, and R.T. de Sousa. Inference of driver behavior using correlated IoT data from the vehicle telemetry and the driver mobile phone. In Proceedings of the 2019 Federated Conference on Computer Science and Information Systems (FedCSIS). IEEE, 2019, pp. 487–491.
- Navneeth, S., K. Prithvil, N.S. Hari, R. Thushar, and M. Rajeswari. On-board diagnostics and driver profiling. In Proceedings of the 2020 5th International Conference on Computing, Communication and Security (ICCCS). IEEE, 2020, pp. 1–6.
- Khandakar, A., M.E. Chowdhury, R. Ahmed, A. Dhib, M. Mohammed, N.A.M. Al-Emadi, and D. Michelson. 2019. Portable system for monitoring and controlling driver behavior and the use of a mobile phone while driving. Sensors 19: 1563. [Google Scholar] [CrossRef]
- Nirmali, B., S. Wickramasinghe, T. Munasinghe, C. Amalraj, and H.D. Bandara. Vehicular data acquisition and analytics system for real-time driver behavior monitoring and anomaly detection. In Proceedings of the 2017 IEEE International Conference on Industrial and Information Systems (ICIIS). IEEE, 2017, pp. 1–6.
- Husni, E., and G. Boy. 2018. Car driver attitude monitoring system using fuzzy logic with the internet of things. ICIC Express Lett 12: 1115–1122. [Google Scholar]
- Hamid, A.H.F.A., K.W. Chang, R.A. Rashid, A. Mohd, M.S. Abdullah, M.A. Sarijari, and M. Abbas. 2019. Smart vehicle monitoring and analysis system with IoT technology. International Journal of Integrated Engineering 11. [Google Scholar] [CrossRef]
- Khan, I., S. Khusro, and I. Alam. Smartphone distractions and its effect on driving performance using vehicular lifelog dataset. In Proceedings of the 2019 International Conference on Electrical, Communication, and Computer Engineering (ICECCE). IEEE, 2022, pp. 1–6.
- Abdelrahman, A., H.S. Hassanein, and N. Abu-Ali. Data-driven robust scoring approach for driver profiling applications. In Proceedings of the 2018 IEEE Global Communications Conference (GLOBECOM). IEEE, 2018, pp. 1–6.
- Al-refai, G., M. Al-refai, and A. Alzu’bi. 2024. Driving Style and Traffic Prediction with Artificial Neural Networks Using On-Board Diagnostics and Smartphone Sensors. Applied Sciences (2076-3417) 14. [Google Scholar] [CrossRef]
- Abdelrahman, A.E., H.S. Hassanein, and N. Abu-Ali. 2020. Robust data-driven framework for driver behavior profiling using supervised machine learning. IEEE transactions on intelligent transportation systems 23: 3336–3350. [Google Scholar] [CrossRef]
- Adu-Gyamfi, K.K., K. Ahmadi-Dehrashid, Y.O. Adu-Gyamfi, P. Gunaratne, and A. Sharma. 2023. MobiScout: A scalable cloud-based driving and activity monitoring platform featuring an IOS app and a WatchOS extension. SoftwareX 24: 101588. [Google Scholar] [CrossRef]
- Sutanto, E.; Sapuan, I.; Yazid, M.; Fahmi. Android based position tracking for car condition monitoring. In Proceedings of the AIP Conference Proceedings. AIP Publishing LLC, 2020, Vol. 2314, p. 040003.
- BULUT, I.S., and H. ILHAN. Cloud based vehicle and traffic information sharing application architecture for industry 4.0 (iot). In Proceedings of the 2019 International Conference on Information and Telecommunication Technologies and Radio Electronics (UkrMiCo). IEEE, 2019, pp. 1–7.
- Falco, M., I. Núñez, and F. Tanzi. Improving the fleet monitoring management, through a software platform with IoT. In Proceedings of the 2019 IEEE International Conference on Internet of Things and Intelligence System (IoTaIS). IEEE, 2019, pp. 238–243.
- Hasan, A.J., and A. Al-Omary. Traffic management system using vanet on cloud and smart phone. In Proceedings of the 2nd Smart Cities Symposium (SCS 2019). IET, 2019, p. 46.
- Bánhelyi, B., and T. Szabó. Data mining and analysis for data from vehicles based on the obdii standard. Proceedings of the 11th International Conference on Applied Informatics 2020.
- Farrugia, M., J.P. Azzopardi, E. Xuereb, C. Caruana, and M. Farrugia. The usefulness of diesel vehicle onboard diagnostics (OBD) information. In Proceedings of the 2016 17th International Conference on Mechatronics-Mechatronika (ME). IEEE, 2016, pp. 1–5.
- Kalmeshwar, M., and K.N. Prasad. Development of On-Board Diagnostics for Car and it’s Integration with Android Mobile. In Proceedings of the 2017 2nd International Conference on Computational Systems and Information Technology for Sustainable Solution (CSITSS). IEEE, 2017, pp. 1–6.
- Srividya, K., S. Ganesh, F.M. Faizal, S. Nandhu, and K.S. Adithya. AR Based Vehicle Diagnostic Tool. In Proceedings of the 2023 Intelligent Computing and Control for Engineering and Business Systems (ICCEBS). IEEE, 2023, pp. 1–6.
- Jung, J., S. Han, M. Park, and S.j. Cho. 2024. Automotive digital forensics through data and log analysis of vehicle diagnosis Android apps. Forensic Science International: Digital Investigation 49: 301752. [Google Scholar] [CrossRef]
- Giron, J.D., B.S. Sermeno, A.T. Santiago, J.A.N. Yago, M.A.B. Domingo, L.A.S. Tayo, and L.A.R. Tria. Development of a Mobile Application-Based System Diagnostics and Monitoring for a Battery Electric Vehicle. In Proceedings of the 2023 IEEE Transportation Electrification Conference and Expo, Asia-Pacific (ITEC Asia-Pacific). IEEE, 2023, pp. 1–7.
- Witaszek, K., and M. Witaszek. 2023. Diagnosing the thermostat using vehicle on-board diagnostic (OBD) data. Diagnostyka 24. [Google Scholar] [CrossRef]
- Stathers, C., M. Muhammad, A. Fasanmade, A. Al-Bayatti, J. Morden, and M.S. Sharif. Digital data extraction for vehicles forensic investigation. In Proceedings of the 2022 International Conference on Innovation and Intelligence for Informatics, Computing, and Technologies (3ICT). IEEE, 2022, pp. 553–558.
- Turk, Y., B. Ozcan, and S. Gören. Precise Vehicle Positioning for Indoor Navigation via OpenXC. In Proceedings of the VEHITS, 2018, pp. 440–445.
- Saufi, N.N.C., N.S.M.A. Razak, and H. Mansor. FoRent: vehicle forensics for car rental system. In Proceedings of the Proceedings of the 3rd International Conference on Cryptography, Security and Privacy, 2019, pp. 153–157.
- Gupta, A., S. Hu, W. Zhong, A. Sadek, L. Su, and C. Qiao. Road grade estimation using crowd-sourced smartphone data. In Proceedings of the 2020 19th ACM/IEEE International Conference on Information Processing in Sensor Networks (IPSN). IEEE, 2020, pp. 313–324.
- Kyriakou, C., S.E. Christodoulou, and L. Dimitriou. 2019. Smartphone-based pothole detection utilizing artificial neural networks. Journal of Infrastructure Systems 25: 04019019. [Google Scholar] [CrossRef]
- Hou, Y., A. Gupta, T. Guan, S. Hu, L. Su, and C. Qiao. VehSense: Slippery road detection using smartphones. In Proceedings of the 2017 IEEE 85th vehicular technology conference (VTC Spring). IEEE, 2017, pp. 1–5.
- Ashwini, K., G. Bhagwat, T. Sharma, and P.S. Pagala. Trigger-based pothole detection using smartphone and OBD-II. In Proceedings of the 2020 IEEE International Conference on Electronics, Computing and Communication Technologies (CONECCT). IEEE, 2020, pp. 1–6.
- Li, Q., F. Qiao, L. Yu, and J. Shi. 2018. Modeling vehicle interior noise exposure dose on freeways: Considering weaving segment designs and engine operation. Journal of the Air and Waste Management Association 68: 576–587. [Google Scholar] [CrossRef]
- Rocha, D., G. Teixeira, E. Vieira, J. Almeida, and J. Ferreira. 2023. A modular in-vehicle C-ITS architecture for sensor data collection, vehicular communications and cloud connectivity. Sensors 23: 1724. [Google Scholar] [CrossRef]
- Kyriakou, C., and S.E. Christodoulou. Roadway pavement roughness evaluation based on smart-city principles, vibration sensing and machine learning. In Proceedings of the EC3 Conference 2022. European Council on Computing in Construction, 2022, Vol. 3, pp. 0–0.
- Singh, S.K., and A.K. Singh. 2022. Vehicular impact analysis of driving for accidents using on board diagnostic II. Bulletin of electrical engineering and informatics 11: 2696–2704. [Google Scholar] [CrossRef]
- Tsai, Y.C., W.H. Lee, and C.M. Chou. A safety driving assistance system by integrating in-vehicle dynamics and real-time traffic information. In Proceedings of the 2017 IEEE 8th International Conference on Awareness Science and Technology (iCAST). IEEE, 2017, pp. 416–421.
- Li, S., N. Liu, H. Zhang, and C. Wu. Mileage traveled, driving time, and speeding behavior as predictors for hazmat transportation risk assessment using naturalistic driving data. In Proceedings of the 2019 5th International Conference on Transportation Information and Safety (ICTIS). IEEE, 2019, pp. 705–711.
- Shaily, S., S. Krishnan, S. Natarajan, and S. Periyasamy. 2021. Smart driver monitoring system. Multimedia Tools and Applications 80: 25633–25648. [Google Scholar] [CrossRef]
- Kalgal, S.R., M. Niranjana, A. Vadakannavar, R.M. Hegde, and B. Nagabhushana. Segmented studies on urban driving cycle and traffic patterns. In Proceedings of the 2017 International conference on Microelectronic Devices, Circuits and Systems (ICMDCS). IEEE, 2017, pp. 1–6.
- Andria, G., F. Attivissimo, A. Di Nisio, A.M.L. Lanzolla, and A. Pellegrino. Design and implementation of automotive data acquisition platform. In Proceedings of the 2015 IEEE International Instrumentation and Measurement Technology Conference (I2MTC) Proceedings. IEEE, 2015, pp. 272–277.
- Jachimczyk, B., D. Dziak, J. Czapla, P. Damps, and W.J. Kulesza. 2018. IoT on-board system for driving style assessment. Sensors 18: 1233. [Google Scholar] [CrossRef] [PubMed]
- Diego, R.N., P.M. Campoverde, G.Q. Novillo, and A.N. Bermeo. Development of an algorithm capable of classifying the starting, gear change and engine brake variables of a vehicle by analyzing OBD II signals. Systems and Information Sciences. ICCIS 2020.
- Stutts, J., D. Reinfurt, L. Staplin, E. Rodgman, and et al. The role of driver distraction in traffic crashes. 2001. AAA Foundation for Traffic Safety 2012.
- Nath, P., and A. Malepati. IMU based accident detection and intimation system. In Proceedings of the 2018 2nd International Conference on Electronics, Materials Engineering and Nano-Technology (IEMENTech). IEEE, 2018, pp. 1–4.
- Zualkernan, I.A., F. Aloul, S. Al Qasimi, A. AlShamsi, M. Al Marashda, and A. Ahli. Digimesh-based social internet of vehicles (siov) for driver safety. In Proceedings of the 2018 International Symposium in Sensing and Instrumentation in IoT Era (ISSI). IEEE, 2018, pp. 1–5.
- Singh, P., M.S. Suryawanshi, and D. Tak. Smart fleet management system using IoT, computer vision, cloud computing and machine learning technologies. In Proceedings of the 2019 IEEE 5th International Conference for Convergence in Technology (I2CT). IEEE, 2019, pp. 1–8.
- Aseervatham, V., C. Lex, and M. Spindler. 2016. How do unisex rating regulations affect gender differences in insurance premiums? The Geneva Papers on Risk and Insurance-Issues and Practice 41: 128–160. [Google Scholar] [CrossRef]
- Wahl, H., E. Naz, C. Kaufmann, and A. Mense. Simplifying the complexity for vehicle health management system. In Proceedings of the 2016 7th International Multi-Conference on Complexity, Informatics and Cybernetics, IMCIC 2016, 2016, pp. 2–6.
- Nugroho, S.A., E. Ariyanto, and A. Rakhmatsyah. Utilization of Onboard Diagnostic II (OBD-II) on four wheel vehicles for car data recorder prototype. In Proceedings of the 2018 6th International Conference on Information and Communication Technology (ICoICT). IEEE, 2018, pp. 7–11.
- Lehoczký, P., F. Čaplák, D. Cok, R. Križan, and L. Šoltés. Design of an intelligent vehicle accident detection system. In Proceedings of the 2022 20th International Conference on Emerging eLearning Technologies and Applications (ICETA). IEEE, 2022, pp. 371–376.
- Hong, K.W., and D.H. Park. SLICE-based Trustworthiness Analysis system. In Proceedings of the 2018 International Conference on Information and Communication Technology Convergence (ICTC). IEEE, 2018, pp. 1389–1390.
- Zhang, M., T. Wo, and T. Xie. A Platform Solution of Data-Quality Improvement for Internet-of-Vehicle Services. In Proceedings of the 2018 IEEE International Conference on Pervasive Computing and Communications (PerCom). IEEE, 2018, pp. 1–7.
- Backman, J., J. Väre, K. Främling, M. Madhikermi, and O. Nykänen. IoT-based interoperability framework for asset and fleet management. In Proceedings of the 2016 IEEE 21st International Conference on Emerging Technologies and Factory Automation (ETFA). IEEE, 2016, pp. 1–4.
- Pranjoto, H., L. Agustine, and M. Mereditha. 2017. OBD-II-based vehicle management over GPRS wireless network for fleet monitoring and fleet maintenance management. Journal of Telecommunication, Electronic and Computer Engineering 10: 15–18. [Google Scholar]
- Vasconcelos, F., L. Figueiredo, A. Almeida, and J.C. Ferreira. SMART sensor network: With Bluetooth low energy and CAN-BUS. In Proceedings of the 2017 IEEE International Conference on Service Operations and Logistics, and Informatics (SOLI). IEEE, 2017, pp. 217–223.
- Husni, E. 2017. Driving and Fuel Consumption Monitoring with Internet of Things. Int. J. Interact. Mob. Technol. 11: 78–97. [Google Scholar] [CrossRef]
- Srinivasan, A. IoT cloud based real time automobile monitoring system. In Proceedings of the 2018 3rd IEEE International Conference on Intelligent Transportation Engineering (ICITE). IEEE, 2018, pp. 231–235.
- Weis, A., M. Strandskov, K. Yelamarthi, M.S. Aman, and A. Abdelgawad. Rapid deployment of IoT enabled system for automobile fuel range and gas price location. In Proceedings of the 2017 IEEE International Conference on Electro Information Technology (EIT). IEEE, 2017, pp. 452–455.
- Alazawi, S., and A. Al-Khayyat. Design and Implementation of a Vehicle Tracking System Using the Internet of Things (IoT). In Proceedings of the 2022 Fifth College of Science International Conference of Recent Trends in Information Technology (CSCTIT). IEEE, 2022, pp. 265–270.
- Smith, K., and J. Miller. OBDII data logger design for large-scale deployments. In Proceedings of the 16th International IEEE Conference on Intelligent Transportation Systems (ITSC 2013). IEEE, 2013, pp. 670–674.
- Zeb, A., K.S. Khattak, A. Agha, Z.H. Khan, M.A.J. Sethi, and A.N. Khan. 2022. On-board diagnostic (OBD-II) based cyber physical system for road bottlenecks detection. J. Eng. Sci. Technol 17: 906–922. [Google Scholar]
- Moniaga, J.V., S.R. Manalu, D.A. Hadipurnawan, and F. Sahidi. Diagnostics vehicle’s condition using obd-ii and raspberry pi technology: study literature. In Proceedings of the Journal of Physics: Conference Series. IOP Publishing, 2018, Vol. 978, p. 012011.
- Shetty, S.V., H. Sarojadevi, K. Akshay, D. Bhat, and M. Thippeswamy. Iot based automated car maintenance assist. In Proceedings of the 2017 International Conference on Advances in Computing, Communications and Informatics (ICACCI). IEEE, 2017, pp. 501–508.
- Singh, S.K., A.K. Singh, and A. Sharma. OBD-II based Intelligent Vehicular Diagnostic System using IoT. In Proceedings of the ISIC, 2021, Vol. 21, pp. 25–27.
- Hamid, A., M. Rahman, S. Khan, A. Adom, M. Rahim, N. Rahim, M. Ismail, and A. Norizan. Connected car: engines diagnostic via Internet of Things (IoT). In Proceedings of the Journal of Physics: Conference Series. IOP Publishing, 2017, Vol. 908, p. 012079.
- Kirthika, V., and A. Vecraraghavatr. Design and development of flexible on-board diagnostics and mobile communication for internet of vehicles. In Proceedings of the 2018 International Conference on Computer, Communication, and Signal Processing (ICCCSP). IEEE, 2018, pp. 1–6.
- Patel, C.S., and J.A. Gaikwad. 2020. IoT-based augmented reality application for diagnostic vehicle’s condition using OBD-II scanner. Int J Eng Res Technol (IJERT) 9: 2278–0181. [Google Scholar]
- Wei, L., H. Duan, D. Jia, Y. Jin, S. Chen, L. Liu, J. Liu, X. Sun, and J. Li. 2020. Motor oil condition evaluation based on on-board diagnostic system. Friction 8: 95–106. [Google Scholar] [CrossRef]
- Jeong, Y., S. Son, E. Jeong, and B. Lee. 2018. An integrated self-diagnosis system for an autonomous vehicle based on an IoT gateway and deep learning. Applied Sciences 8: 1164. [Google Scholar] [CrossRef]
- BinMasoud, A., and Q. Cheng. Design of an iot-based vehicle state monitoring system using raspberry pi. In Proceedings of the 2019 International Conference on Electrical Engineering Research and Practice (ICEERP). IEEE, 2019, pp. 1–6.
- Neilson, A., B. Daniel, and S. Tjandra. 2019. Systematic review of the literature on big data in the transportation domain: Concepts and applications. Big Data Research 17: 35–44. [Google Scholar] [CrossRef]
- Kaffash, S., A.T. Nguyen, and J. Zhu. 2021. Big data algorithms and applications in intelligent transportation system: A review and bibliometric analysis. International journal of production economics 231: 107868. [Google Scholar] [CrossRef]
- Piotr, B., W. Turek, A. Byrski, and K. Cetnarowicz. Towards credible driver behavior modeling. In Proceedings of the 2015 IEEE 18th International Conference on Intelligent Transportation Systems. IEEE, 2015, pp. 1557–1562.
- Rodrigues, J.G., A. Aguiar, F. Vieira, J. Barros, and J.P.S. Cunha. A mobile sensing architecture for massive urban scanning. In Proceedings of the 2011 14th International IEEE Conference on Intelligent Transportation Systems (ITSC). IEEE, 2011, pp. 1132–1137.
- Carsten, O., K. Kircher, and S. Jamson. 2013. Vehicle-based studies of driving in the real world: The hard truth? Accident Analysis & Prevention 58: 162–174. [Google Scholar] [CrossRef] [PubMed]
- AbuAli, N. Advanced vehicular sensing of road artifacts and driver behavior. In Proceedings of the 2015 IEEE Symposium on Computers and Communication (ISCC). IEEE, 2015, pp. 45–49.
- Shen, W. 2017. Traveling wave profiles for a follow-the-leader model for traffic flow with rough road condition. arXiv arXiv:1711.01819. [Google Scholar] [CrossRef]
- Khan, D., Z.H. Khan, W. Imran, K.S. Khattak, and T.A. Gulliver. 2022. Macroscopic flow characterization at T-junctions. Transportation research interdisciplinary perspectives 14: 100591. [Google Scholar] [CrossRef]
- Chhabra, R., and S. Singh. A survey on smart phone-based road condition detection systems. In Proceedings of the International Conference on Emerging Technologies: AI, IoT, and CPS for Science & Technology Applications, 2021.
- Ranyal, E., A. Sadhu, and K. Jain. 2022. Road condition monitoring using smart sensing and artificial intelligence: A review. Sensors 22: 3044. [Google Scholar] [CrossRef]
- Ali, F., Z.H. Khan, F.A. Khan, K.S. Khattak, and T.A. Gulliver. 2022. A new driver model based on driver response. Applied Sciences 12: 5390. [Google Scholar] [CrossRef]
- Khan, Z.H., T.A. Gulliver, W. Imran, K.S. Khattak, A.B. Altamimi, and A. Qazi. 2022. A macroscopic traffic model based on relaxation time. Alexandria Engineering Journal 61: 585–596. [Google Scholar] [CrossRef]
Figure 1.
PRISMA flow diagram for vehicle telematics in ITS domain
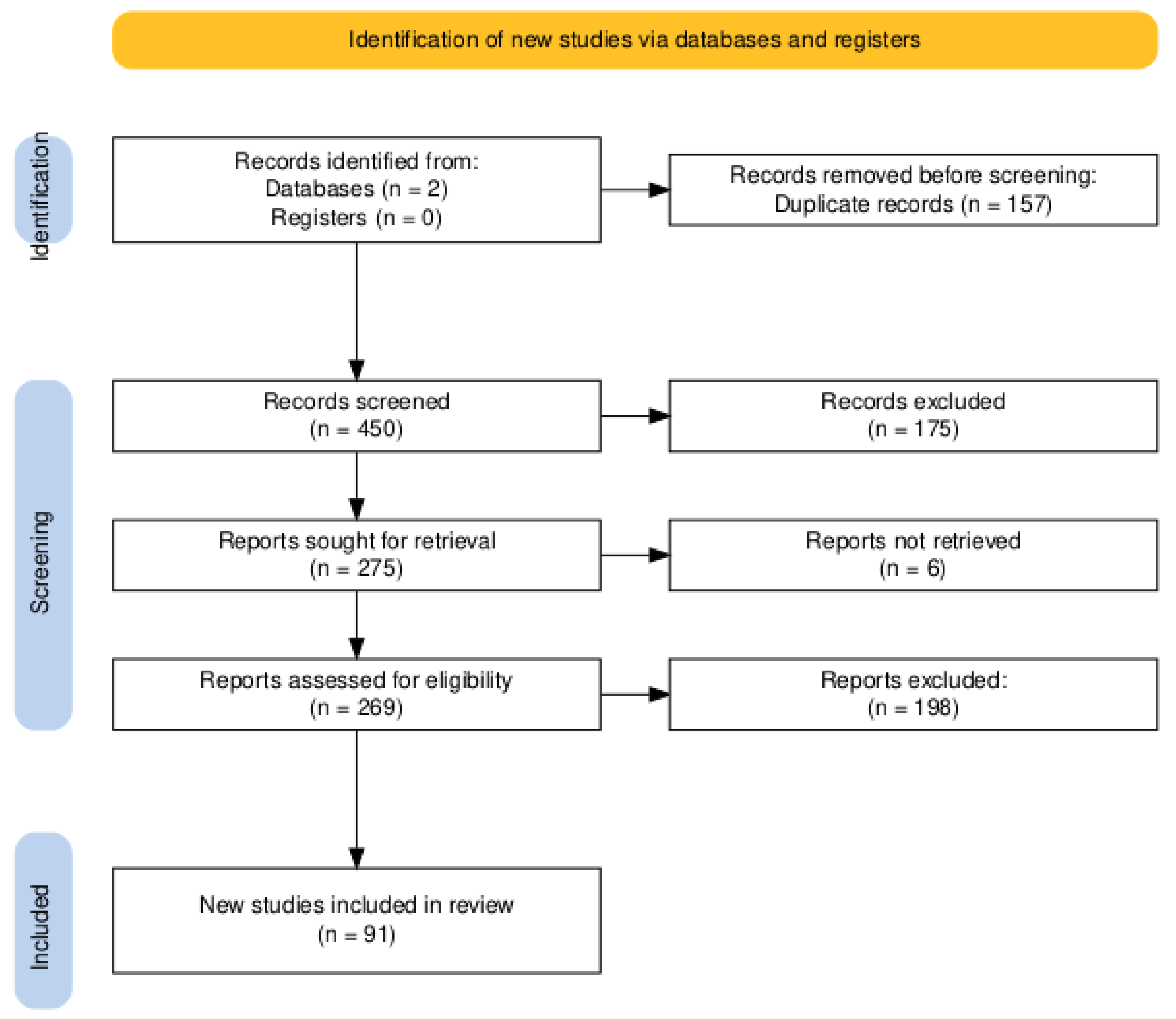
Figure 2.
Applied applications of vehicle telematics in ITS
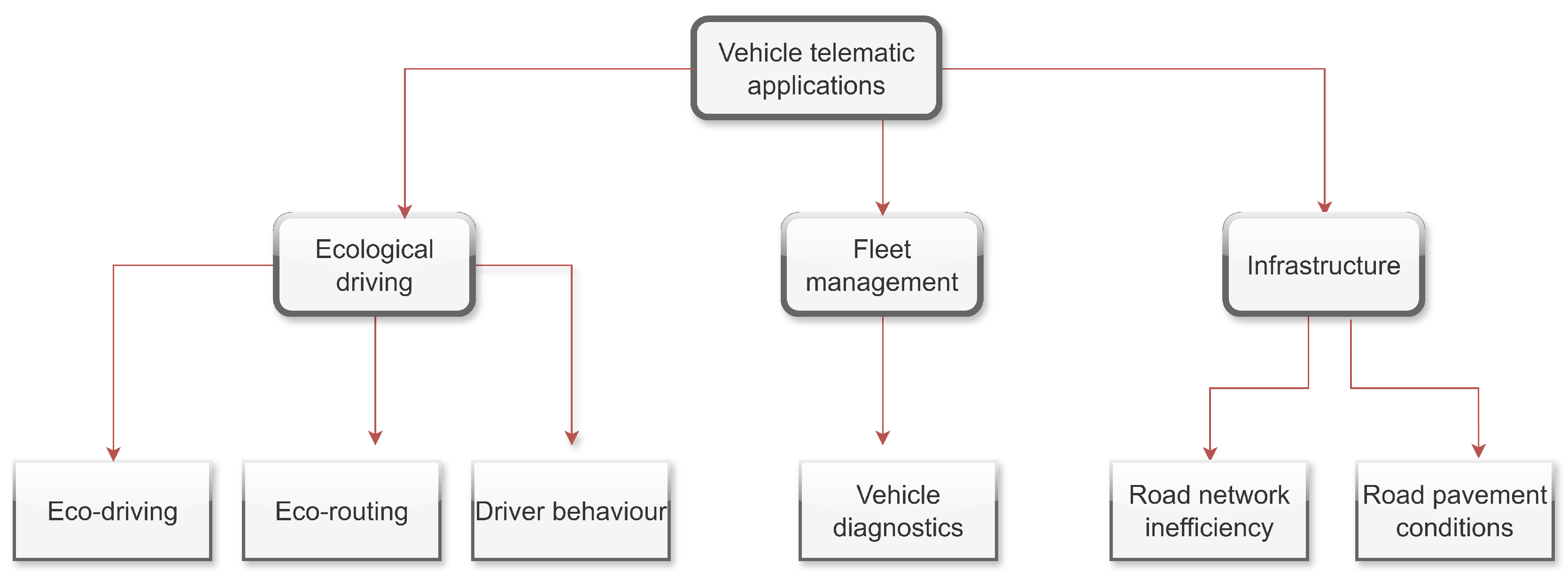
Table 1.
Summary of reviews on vehicle telematics in intelligent transportation systems
| Title | Aim/Objective | Study Range | Papers |
|---|---|---|---|
| A Review on improved driving efficiency by leveraging smartphone sensors in India. Chatterjee and Madhavan (2022) | The aim of this paper is to investigate the various methods provided by the smartphone for achieving driving efficiency. They also focus on how geographical location impacts the analysis of data from telematics devices for evaluating driver behavior. | 2009–2022 | 19 |
| Comprehensive driver behaviour review: Taxonomy, issues and challenges, motivations and research direction towards achieving a smart transportation environment. Zaidan et al. (2022) | This study reviews and analyses articles on driver behaviour and sensors, classifies them into components via a coherent taxonomy, and discusses challenges and motivations faced in the domain. | 2010–2021 | 155 |
| Analyzing driver behavior under naturalistic driving conditions: A review. Singh and Kathuria (2021a) | This paper explores devices and methodologies for analyzing naturalistic driving data, factors affecting driving behavior, and implications for road safety improvement. | 1992–2020 | 135 |
| Profiling drivers to assess safe and eco-driving behavior – A systematic review of naturalistic driving studies. Singh and Kathuria (2021b) | Discusses parameters, methods, and applications used in driver behavior profiling based on naturalistic driving studies. | 2008–2020 | 14 |
| Eco-Driving and Its Impacts on Fuel Efficiency: An Overview of Technologies and Data-Driven Methods. Fafoutellis et al. (2020) | Identifies driving behavior factors affecting fuel consumption and explores data-driven modeling techniques for accurate estimation. | 1997–2020 | 17 |
| A critical overview of driver recording tools. Ziakopoulos et al. (2020) | Compares various driver recording tools and identifies future challenges for their application. | 2000–2020 | Nill |
| Systematic Literature Review on Automotive Diagnostics. de Oliveira et al. (2017) | Investigates main challenges in automotive diagnostics, common methods used, problems in those methods, and unresolved issues. | 2011–2017 | 40 |
| Survey of smartphone-based sensing in vehicles for intelligent transportation system applications. Engelbrecht et al. (2015) | Analyzes the use of smartphones in intelligent transportation system applications. | 2007–2015 | 24 |
Table 2.
Papers Selected for Systematic Review
| Databases | No. of Papers Found |
|---|---|
| Scopus | 367 |
| Web of Science | 240 |
| Total | 607 |
Table 3.
Papers Selected for Systematic Review
| Database | No. of Papers Selected |
|---|---|
| Scopus | 44 |
| Web of Science | 47 |
| Total | 91 |
Table 10.
Summary of Future Research Directions in Vehicle Telematics
| Direction | Key Focus | Expected Impact |
|---|---|---|
| Road Network Efficiency | Bottleneck detection, link resistance analysis | Reduced congestion, optimized traffic flow |
| Pavement Monitoring | IMU + AI-based road condition assessment | Improved road safety and maintenance planning |
| Compact Hardware Design | Vehicle-agnostic, easy-to-install telematics units | Wider adoption and deployment flexibility |
| Driving Behavior Analysis | Emission-aware driving models | Reduced environmental impact |
| EV and Cost Optimization | Energy-aware system and app extensibility | Enhanced EV performance and accessibility |
| Multimodal Sensing | Vision sensors and deep learning models | Higher detection accuracy and prediction robustness |
| Urban Planning Integration | Calibration of traffic simulators using telematics | Better infrastructure and policy decisions |
| Context-Aware Modeling | Road-type and congestion-aware models | Improved prediction accuracy |
| Edge and Resilient Networking | Edge caching, V2V/V2I communication | Reliable operation under connectivity constraints |
| Smart City Scalability | IoT interoperability and large-scale analytics | City-wide intelligent mobility solutions |
| Energy Efficiency | Low-power protocols and adaptive sampling | Extended device and vehicle battery life |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



