
Submitted:
23 March 2025
Posted:
29 March 2025
You are already at the latest version
Abstract
This work presents a novel wave energy converter (WEC) that efficiently harnesses hydrostatic pressure fluctuations through an innovative multi-chamber vertical design. The system consists of vertically stacked, air-filled cylindrical chambers, each equipped with a piston connected to a common central shaft anchored to the seabed. Unlike conventional single-chamber WECs that suffer from poor compressibility response in large volumes, our distributed chamber solution provides significantly greater sensitivity to small pressure variations while maintaining scalability. The design achieves synchronized piston displacement through two optimized approaches: (1) quantitative volume reduction of chambers from bottom to top, or (2) precise piston area reduction from top to bottom. Both methods ensure uniform oscillation amplitudes across all pistons, enabling efficient energy transfer through a single power take-off (PTO) unit. This addresses the critical challenge of cost-effective scalability in hydrostatic pressure harvesting systems. The device incorporates dynamic responsiveness through automated real-time adjustments based on wave characteristics, overcoming the second major limitation of static WEC systems. Furthermore, the system compensates for the inherent efficiency limitations of hydrostatic pressure harvesting by incorporating wave amplification techniques that convert kinetic energy to additional potential energy. Since wave energy scales quadratically with wave height, this approach can make the device more cost-effective than other renewable energy sources in high-wave conditions. Key innovations include: Vertically distributed chamber architecture for optimal pressure response; Dual-configuration synchronization mechanism (volume or area optimization); Real-time dynamic adaptation to wave conditions; Integrated wave amplification for enhanced energy capture; Single-PTO design for scalable, cost-effective implementation. This comprehensive solution addresses three fundamental challenges in wave energy conversion: scalability, dynamic responsiveness, and hydrostatic harvesting efficiency, presenting a significant advancement in renewable energy technology.
Keywords:
Renewable-Energy
; Wave-Energy-Converter
; WEC
; Differential-Pressure
Background
Wave energy represents one of the largest untapped
renewable energy resources, yet remains significantly underdeveloped due to
persistent technical challenges. While the theoretical potential of wave energy
is immense - estimated at 2 TW globally - existing wave energy converter (WEC)
technologies continue to face critical limitations in efficiency, scalability,
and cost-effectiveness that have prevented widespread commercial adoption.
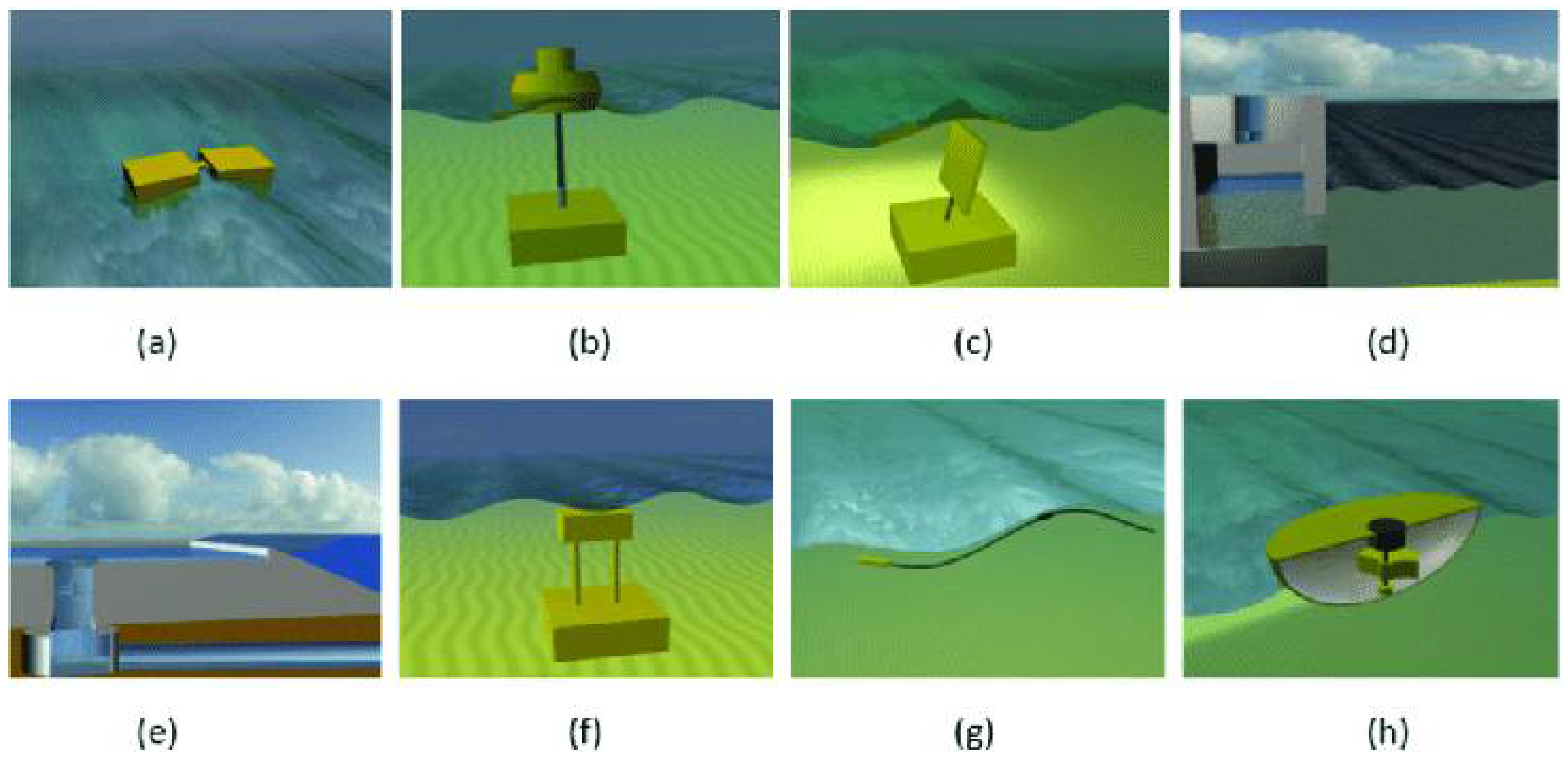
Current WEC technologies can be broadly classified
into eight primary categories:
Figure 1.
Types of WECs: (a) attenuator, (b) point absorber, (c) oscillating wave surge converter, (d) oscillating water column, (e) overtopping device, (f) submerged pressure differential, (g) bulge wave, (h) rotating mass [1].
Figure 1.
Types of WECs: (a) attenuator, (b) point absorber, (c) oscillating wave surge converter, (d) oscillating water column, (e) overtopping device, (f) submerged pressure differential, (g) bulge wave, (h) rotating mass [1].
Despite this diversity of approaches, WEC technologies
lag far behind other renewable energy sources like photovoltaics and wind
turbines in terms of commercial viability. This performance gap stems from
three fundamental challenges:
1. Environmental Challenges:
- Corrosive marine conditions requiring specialized materials
- Extreme wave forces during storm events (50-100× normal operating loads)
- Biofouling and maintenance accessibility issues
- High operation and maintenance costs (25-30% of lifetime expenses)
2. Technical Limitations:
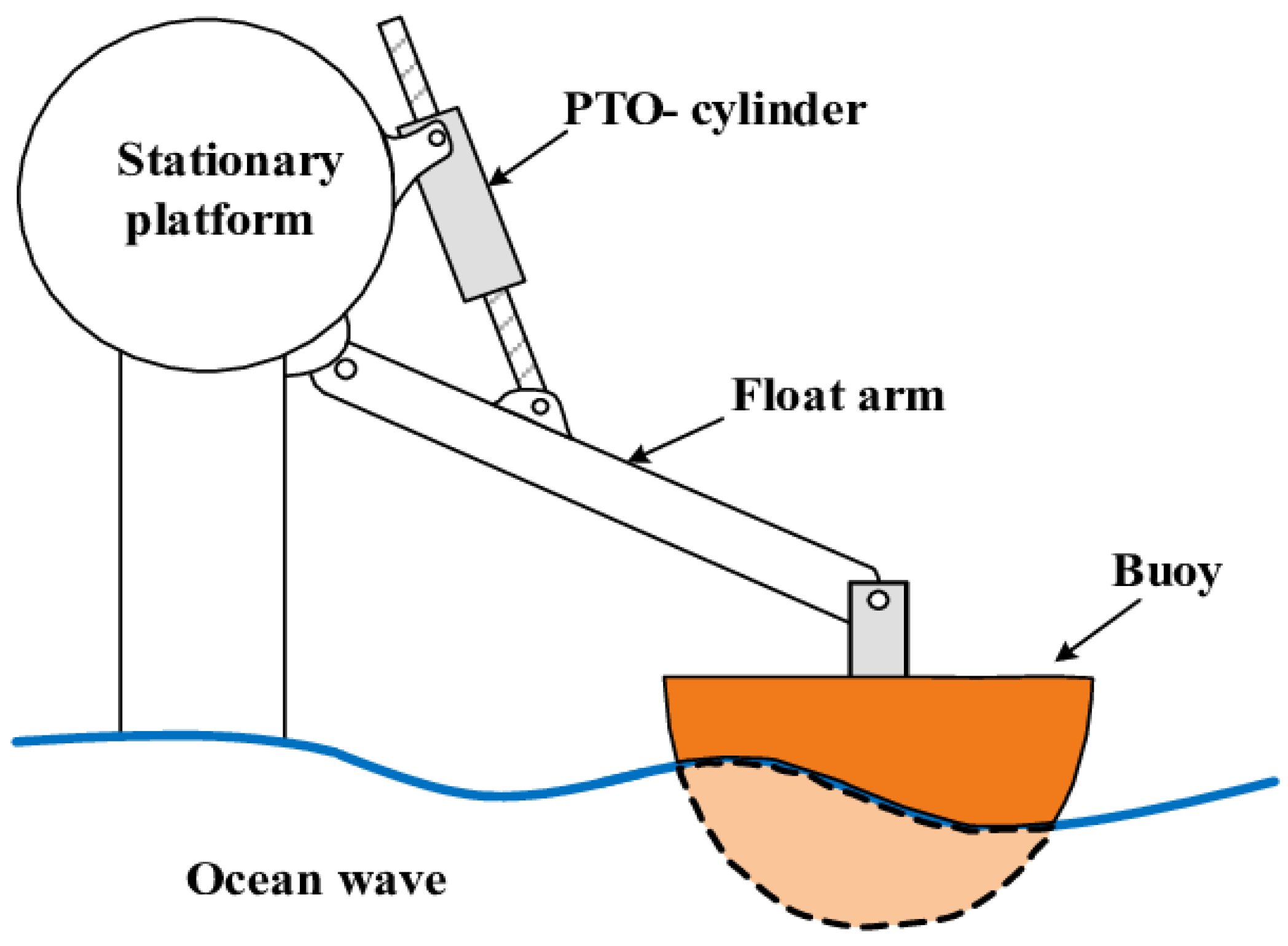
Surface-mounted devices, while capable of capturing
both kinetic and potential wave energy, face particular vulnerability to storm
damage. For example, point absorber buoys frequently suffer structural failures
when encountering waves exceeding their design specifications.
Figure 2.
[2].
While submerged devices avoid surface hazards, they
typically capture only hydrostatic pressure fluctuations - approximately 50% of
total wave energy - and face their own challenges with scalability and
maintenance accessibility.
Energy Capture Efficiency
The hydrostatic pressure harvesting method presents
a unique opportunity-reward scenario:
- Pressure increases linearly with wave height (ΔP ∝ h)
- Energy increases quadratically (E ∝ h²)
Thus, doubling wave height quadruples available
energy. However,current
submerged systems fail to capitalize on this relationship due to:
- Hysteresis losses in pressure-volume conversion
- Inability to respond dynamically to varying wave conditions
- Volume scalability limitations that reduce sensitivity to small waves
The proposed
invention addresses these limitations through three key innovations:
- A vertically-stacked, multi-chamber architecture that enables cost-effective scaling while maintaining sensitivity
- Dynamic response mechanisms that automatically optimize system parameters for each wave
- Integrated wave amplification techniques that convert kinetic energy to additional potential energy
- These advances specifically target the three main challenges in hydrostatic pressure harvesting:
- Scalability: Overcoming the volume-response time tradeoff through distributed chambers
- Dynamic Responsiveness: Real-time adaptation to varying wave conditions
- Efficiency Enhancement: Wave amplification to maximize potential energy capture
The system's single power take-off (PTO) design
provides additional advantages in reliability and maintenance compared to
conventional multi-PTO architectures. In a 10-unit configuration, for instance,
failure of a single energy converter unit reduces output by only 10%, while
maintenance requirements scale proportionally with system size.
This combination of technical solutions positions
the proposed device to overcome the historical limitations of submerged WECs
while maintaining their inherent advantages in reliability and survivability.
The following sections detail the design innovations that enable this
breakthrough in wave energy conversion technology.
Key
improvements in this version:
- Clearer structure with numbered lists for technical points
- More precise technical language
- Better flow between concepts
- Stronger emphasis on the innovation's unique advantages
- Proper integration of figures
- Removal of redundant information
- More professional tone while maintaining technical accuracy
Understanding the Wave
Let’s first review the physical meaning of wave and
buoyancy since they are involved in our proposed concept before we delve to the
proposed solution.
Wave Energy
Many forms of energy are carried in heat, light,
sound, and water waves, energy is defined as the ability to do work, all forms
of energy can be transformed into work, in science, work is defined as the
movement of an object in the direction of the force applied to it, waves do
work when they move objects, we can see this work when heavy logs move across
ocean or sand is transported, work can also be converted into sound energy
heard when waves crash on the shore, the powerful energy in waves can also be
used to do work by moving generator parts to produce electricity.
Technically speaking, source mass will lose energy
and the receiver mass will gain this energy, the medium only decide the speed
of this waves which carry the energy.
Waves carry energy, this is manifested in the fact
that laser waves can remove tumors, ultrasound waves can be used for medical
treatment, thus the energy is been transmitted or shifted from one place to
another.
Energy is a quantity when given to a particular
substance will heat it up or make it do work, the SI unit of energy is Joule.
Mechanical Wave
An oscillating wave of matter transfers energy
through a medium and hence is known as a mechanical wave, the waves can travel
over long distances but the medium of transfer is stationary, this makes the
oscillating material is also stationary, energy is transported by the
mechanical and electromagnetic waves, energy and waves move in the same
direction, elasticity and inertia are required in a medium to produce
mechanical waves.
Wave Energy-Amplitude Relationship
The energy transported by single wave is directly
proportional to the square of the amplitude of the wave, this energy-amplitude
relationship is mathematically expressed as follows:
Once the wave height doubled, the energy will
quadruple, this feature is very important regarding the feasibility effective
point for any WEC.
But unfortunately the ocean waves are way more
complicated to be explained in a single equation for all types, so we need to
delve into these waves to have a better snapshot, and unfortunately the wave
super positioning, constructive and destructive wave’s patterns which require
mathematical models to represent any wave is out of this scope.
Ocean Swells and Sea Waves
Transfer of Energy: It’s important to
remember that sea waves don’t actually transport water over long distances,
instead, they transfer energy through the water, water particles themselves
move in a circular motion as the wave passes.
Wave Properties: Waves are characterized by
several properties, including their wavelength (distance between wave crests),
wave height (vertical distance between crest and trough), and wave period (time
between two successive crests passing a point).
Wave Types: Depending on their formation and
behavior, waves can be categorized as surface waves (affecting the water’s
surface only), internal waves (occurring within the water column), or shallow
water waves (whose behavior is influenced by the seabed).
Water waves travel faster on the surface of deep
water than they do on shallow water
With increasing depth (deep water), pressure
increases, so the force with which it moves must increase as pressure is
directly proportional to force, here force is the velocity, according to
equation, velocity is equal to frequency multiplied with the wavelength
Wave speed in deep water is proportional to the
square root of wave length & gravity and given by the formula
where: λ is the wave length
While wave speed in the shallow water is given by
the formula:
where: h is the water depth
Wave speed is very important since our proposed
invention heavily influenced by the wave period in order to design the system
with optimal response time.
Ocean Wave Power Equation
The mechanical wave energy is the sum of potential
energy and kinetic energy.
The general formula -assuming H<<λ—for total
wave energy density in deep water—where d>λ>2—over one wavelength and per
unit crest width is:
So the mean energy density per unit of sea surface
area will be:
And the wave power per unit length of the wave for
shallow water:
where:
P is the power per meter of the wave crest (W/m)
ρ
is the density of seawater
g is acceleration due to gravity
H is the wave height in meters
c is the wave group velocity
For example, given wave height 2 m, wave period 8
seconds, water depth 5m,
Then the group velocity in shallow water:
This clearly indicates the huge energy in the ocean waiting to be harnessed regarding the full wave energy harvesting based methods.
But our proposed method depends on the hydrostatic pressure fluctuation only which has less condensed-energy in exchange for more reliability, not on the full energy of the wave, so we will develop cost-effective novel apparatus to make the less energy-condensed method more feasible by increasing the volume of the device without affecting the response time to enable very cost-effective scalable solution and to make the system dynamically responsive and manipulate the wave to increase its potential energy on the expense of it kinetic energy.
The Buoyancy Force
Buoyancy force is a fundamental concept in fluid mechanics that describes the upward force exerted on an object submerged or floating in a fluid, according to Archimedes’ principle, the buoyant force is equal to the weight of the fluid displaced by the object, this force arises due to the pressure difference between the top and bottom surfaces of the submerged object.
The buoyancy force is given by the formula:
where:
ρ is the density of water
V is the volume of water displaced
g is the acceleration due to gravity
The buoyancy force is greater for objects that displace a larger volume of fluid.
The buoyant force acts opposite to gravity, resulting in an apparent reduction in weight when an object is submerged in a fluid.
The Proposed Solution—Invention Summery
This process delves into the technical details of the main system, including hydrostatic pressure and the functionality of the buoyant force on submerged structure devices, fundamental physical principles like the Archimedes’ principle, thermodynamics laws, Pascal and Newton laws are explored to explain the mechanism of energy capture.
The proposal concludes by emphasizing the need for further research, development, and testing to refine the design and optimize performance.
This novel wave energy capture device harnesses the hydrostatic pressure fluctuating energy, which is less energy-condensed feature of the wave, specifically constitutes 50% of the total wave’s energy, but this invention effectively scales up the system in cost-effective method with its multi-level air reservoirs to make it more plausible in the final math.
The core idea to use many smaller cylindrical air reservoirs instead of single big one, each one has movable piston, dividing the big reservoir into smaller ones can’t be done randomly, it should be done in very specific methods to achieve unified displacement for all pistons in order to harness their unified and synchronized oscillation together via one shaft connected to PTO.
The first solution to is relying on quantitative volume reduction of the cylindrical air reservoirs from bottom to top of the reservoirs to create same volume oscillation and hence same piston displacement and focus the unified work output on single shaft, the reservoir’s volume should adjust its response time to the most effective point, the unique design for pistons unified oscillation with the central shaft is key feature of this invention, the shaft oscillation can produce the power in many ways including connecting it to gearbox to convert the slow gear speed with high torque into high spinning gear on the last gear coupled with the generator, or by using more reliable but less efficient method like pressuring water to run underwater turbine which is less mechanical complex method and requires less maintenance beside it is less susceptible to failure.
The second solution to achieve the same piston displacement is to rely on quantitative reduction in piston’s area from top to bottom for same volume multi-level reservoirs, this solution will achieve the exact same objective for unified displacement but the forces of the pistons will be different which will not impose any challenge since we only care to achieve unified displacement in order for the central shaft to harness the work done by all pistons effectively.
Those both solutions are equally viable, either to the reduce the volume of the cylinders or to use same volume cylinders with reduced area of pistons to achieve the same displacement for all pistons, but in order to avoid redundancy and explain both solutions for every scenario, we have to choose to explain only one of them, and hence we will choose to explain the volume reduction solution only in all the following explanations and we will not explain the piston’s area reduction solution since it will achieve the same objective, only differently.
So we have to keep in mind, neglecting to mention and explain the piston’s area reduction solution every time is just to make the explanations of the invention more concise not because it’s less viable option, and every time we will be discussing the piston displacement, we have to keep in mind there is always the other solution of piston’s area reduction.
These effective methods of partitioning the big volume which will not be sensitive to small pressure changes and will not respond optimally to bigger changes, is very effective in making the devise more sensitive to these changes and harness more energy because of improved responsiveness.
The second core ides of this embodiment is its dynamic responsive system as per each group of waves or even as per each wave characteristics, unless the system dynamically changes its setting for each wave, it will miss out on harnessing most of the energy from the waves far from the mean average static settings design.
The third core idea in the invention is to construct the ancillary structure for the apparatus in specific design to increase the height of the wave, this can be done in many ways like installing barriers to create interference pattern and position the apparatus in the super position spots, or to converge the wide wave via funnel-shaped-barriers with specific configuration to focal point where the wave will become higher without breaking then install two parallel barriers to confine those high waves, or by installing structure with increasing slope on the seabed by specific angle to increasing the shoaling effect further more until the wave reaches the maximum height without breaking.
Since every wave consists of potential and kinetic energy components, and since the energy of the wave will quadruple if the height doubled, this invention will increase the potential energy which this device harnesses on the expense of the kinetic energy which is irrelevant to the device, and by doubling the wave height for example, the hydrostatic will be doubled, but the energy will be quadruple.
This will be extremely beneficial for this device if we can significantly increase the wave height since the relation between wave height and energy is exponential.
So we will compensate for harnessing of the less energy-dense feature from the incident wave by increasing the overall volume of the device and increase it sensitivity, by dividing the reservoir to many smaller ones—which is the energy capturing unit and is cheap to fabricate- to harness more quantity of the less energy-dense feature of the wave, and to ensure maximum energy harnessing from this feature of each wave, the system will be dynamically respond for each wave’s pattern, and the unique systems ancillary structure design solution will amplify the wave height to further increase the overall efficiency of the system.
After all these improvements, this system may still be overall less efficient than most of the other methods on the surface which are capturing the full energy of the wave, but since there is still no available commercial device yet of these methods because of cost, durability and reliability issues, this invention may be useful in slightly bridging the gap and extract commercial level energy from the ocean waves especially from areas where it’s readily abundant, although the upfront investment is more than the other renewables, which renders it as non-cost-effective solution in the final math in small waves area without wave amplification, but as the wave height increases, the efficiency of this system will become higher, and in high wave areas or with applying wave amplification solution, it could be effectively competing with the other renewables, beside it may efficiently satisfy some niche applications demands for this type of energy in specific areas.
This device is basically many short cylindrical air reservoirs with reducing volumes from bottom to top in precise way in order to reduce the work done on the gas, but do the same work on the pistons, since the deeper we go, the more energy we need to exert to apply the same force, that’s why the bottom cylinders will do more work on the gas, to convert more energy to apply the same force to do the same work on the piston like the next cylinder upward, each cylinder is filled with compressed air as per its designated depth to achieve the targeted required work that will cause the same volume oscillation for every cylinder, -contraction and expansion-, at the base of each cylinder there is a movable piston, these cylinders are fixed in depth on vertically erected fixing structure with heavy foundation to counteract the buoyancy force, the cylindrical reservoir can be made from any marine suitable materials, thermal expansion should be taken into consideration in this materials, hardened light steel alloy with marine coating could be one choice, but since corrosion is the biggest challenge, so non-corrosive materials like HDPE can be better choice, since its walls can withstand the pressure and suitable for marine environment, any suitable alternative alloy or composite materials can be used for practical reasons, it should be rigid material -not deformable material- , anti-fouling paint should apply to protect its surfaces, most importantly the piston should fit snugly and should be made from hard and light non-deformable material to reduce the inertia and improve response time, the piston should be sealed and the edge should be properly lubricated to reduce friction and make the piston move freely, elastic movable sealing is installed between the piston edge and the bottom wall side of the cylinder to prevent the water leak to the reservoir.
The area of the piston can be small and not necessarily to cover the entire cap area of the cylinder in order to reduce the piston mass and minimize its contacting edge with surface of the cylinder to reduce friction, but this should be balanced with other factors like the drag caused by the increased piston speed in water, the piston area and mass will be discussed in detail later in the dynamic repose section.
Since every cylinder is positioned at different height over the seabed but at the same horizontal coordinates, so each one will experience the same hydrostatic pressure change being exerted from the spot area on the surface as the wave’s crest and trough passes over, if all cylinders were having the same volume, in this case each cylinder will contract and expand through its piston and the pistons will do different work and will cause different displacements, as result there will be differences in each piston work being exerted on the main shaft and most importantly difference in phase amplitude due to the different displacements applied on it from many pistons, since every cylinder will contract and expand differently, so each piston will be displaced for different distance, hence come the reduction in cylinders volumes in precise way from bottom to top to ensure we get the same volume oscillations -although cylinders are positioned at different depths- and same piston distance displacement with precise reduced work done by the gas in each cylinder which will produce same force and same displacement being exerted on the pistons which will cause the main shaft to do the exact same oscillation displacement and hence unify all works of all pistons on one energy harvesting unit, because as we said deeper levels will require more energy to impose the same force which will cause same piston displacement like the upper piston, the deeper we go, the more energy we will miss out on, because the same force for cylinder near the surface will require only half the energy of the cylinder at 10 m depth, so the same volume at the top will require double volume at 10 m depth to concert the same quantity of energy.
As the wave’s crest passes over the device—all vertically aligned cylinders -, all cylinders will contract with the same volume change, hence all pistons -because they have the same area- will move up for the same distance as result of same net force, these forces of pistons will produce the same oscillation amplitude, moving the central shaft in unified and synchronized oscillation pace without any discrepancy or forces dissipations.
Stacking the cylinders vertically without synchronizing their displacements will lead to imbalances in their transmitted forces which will cause inefficiencies and unevenly distributed forces and displacements which will lead to mechanical stress where the repeated stress will eventually exacerbate the wear and tear on the central shaft fixing points with the pistons and break them down.
This method has the merit of energy capturing simplicity, the mechanisms are simpler than most of the other WECs with less wear and tear, this design requires fewer moving parts and can use the slow but powerful push-pull effect of the wave, which is gentler on the equipment.
In short, by targeting hydrostatic pressure in low-cost, corrosion-resistive structure, we are trading the high-energy capturing for more practical, sustainable and reliable solution, this tradeoff could be feasible in places where investment in high-output kinetic energy system isn’t feasible.
In this closed thermodynamic system we can approximately categorize this process as isothermal process—only for single specific wave characteristics- and this will be the process we seek to achieve for all different waves as we will see later in the dynamic responsive system because this is the only compression type which produces pure work among all the other types of thermo dynamical processes.
Pressure changes travel through water at the speed of sound in water, which is about 1481 m/s. this rapid propagation ensures the pressure increase reaches all cylinders instantaneously.
When the crest passes over the multi-layered vertical cylindrical reservoirs, the air in each cylinder will be compressed -due to the higher water column above it—and their volume will change because of the free to move piston according to its depth and volume, this change in volume will follow Boyle’s low and the work done will be approximated as per isothermal system formula which the system dynamics always seek to achieve as we will see later.
The buoyancy force—as result to the cylinders volumes change which will be way less than the hydrostatic pressure changing force- being excreted on each cylinder, will be reduced because of the cylinder reduced volume, this force decrement will counteract the exerted forces on the pistons because of the pressure changes and it will be deducted from the overall energy output.
since we imposed reducing volumes from bottom to top in order to maintain the same volume oscillations, each cylinder will do less work by the gas and exert less pressure on the piston, but these decreasing pressures will produce the same force on each cylinder’s piston from bottom to top, and all pistons will oscillate in line with unified distance displacement we aim to achieve, so all cylinders will contract by the same volume pulling all the pistons with the same force and for the same distance, and as result pulling the main shaft -which is firmly connected to all pistons- upward with single unified force and displacement equal to the total of all works done by all pistons.
Once the cycle flips and the wave’s trough comes over the cylinders, the air inside each cylinder will expand pushing the pistons downward, and these pistons will move the main shaft along with them with force and displacement equal to the combined of all pistons works.
The deeper we put the cylinders, the more its volume should be, and the more compressed the air will be, then more energy from the gas we can get in every cylinder, then more pressure we can produce from this more energy in each one, but since force requires more energy as the depth increases, so this more exerted pressure will be translated to the same force produced by any cylinder.
Also the thickness of cylinder will increase accordingly, which will drive the cost up, that’s why the device design should try to increase the volume by increasing the diameter more than trying to increase the height, but also increasing the diameter will also has maximum efficiency limit which it will start to decrease after it.
Why Not Use One Big Chamber Instead of Many Smaller Chambers’ Costly Method
We need to capture as much energy as we can at the given time frame from the incident wave, although taller cylinder will mean more volume, and since volume will dictate how much energy we can capture from the incident wave, i.e., two times more volume at the same depth will capture two times more energy from the same incident wave, but volume is one of the parameters which dictates the response time, and since appropriate response time is crucially essential for the energy harnessing, so we can’t increase the volume and its respond time beyond the given time frame as per wave’s period, otherwise we will end up harnessing less energy when compared with many vertically aliened reservoirs with smaller volumes equal to the same overall volume in one big cylinder.
Although this system is analogous to spring in many aspects, but regarding response time it starts to deviate, the dynamic of gas compression can be done in many ways, and each one will have different response time.
As per this fact, response time to the rate of pressure change is the crucial key, the response time should stay close to isothermal behavior as much as possible, this is a compressed air system, any mechanical system has response time and hysteresis losses, hysteresis refers to the lag between input and output in a system, mechanical & hydraulic systems has quicker response time and less hysteresis loss compared with pneumatic systems, many factors affect the response time, in this case, bigger volume than specific value, will be the main cause in response delay, since the required time for gas compression increases almost linearly in isothermal process and since the wave has only certain time frame to be harnessed, so this will dictate maximum volume for the chamber for this limited time frame as per the incident wave, and that’s why these type of devices are not scalable beyond that volume limit, transferring the energy to the applied force to do work will take time, the more energy we want to transfer, the more time it will take, so when the hydrostatic pressure increases upon the crest passing over for brief period, the response time represented in pistons’ movements should be as adequate to harness as much energy as it can during this narrow time frame of the incident wave, and for the big chamber it will take longer time for the big quantity of air molecules to be compressed in isothermal process not slower than that, in order not to miss out on harnessing the maximum energy from the incident wave, so the smaller the chamber’s volume is, the faster the response time will be, and the less the hysteresis loss, then we can harness more energy, and since we have many small cylinders, small size cylinder will have faster response time than the big one—we mean to keep maintaining isothermal process and not to become sub-isothermal-, in this way we are ensuring appropriate response time which is the most crucial factor we are aiming to address since the big chambers will fall behind the ideal isothermal process because of slower response time and will harness less energy from the incident wave.
Although the isothermal process technically requires extremely slow process which takes very long time, but we mean with isothermal term in this regard is the optimal response time to convert most of the energy to work than heat, so the precise technical meaning is appropriate response time, but we will stick to the term isothermal for the appropriate time response and sub-isothermal for slower than the appropriate time response.
Smaller volume chambers will increase the sensitivity of the device and it will be able to capture energy from even smaller waves with little pressure change, beside this will make it more efficient in capturing bigger waves energy due to its high sensitivity to small pressure changes.
On the other hand, faster than required response time will shift the process more toward adiabatic process and produce more heat than work.
Explaining this phenomena from anther more nuanced perspective, if we have two chambers for example and one of them is double than the other in volume, and if the smaller chamber is the best fit for specific pressure change for maximum isothermal and energy production, so if the wave is passing over and the pressure changed for specific rate at specific time frame, the bigger chamber will almost respond equally to the pressure change and will almost store the same energy during this time as work—suppose we have work done on the gas scenario-, so in this case the rest of the volume of the bigger chamber -i.e., the other 50% volume- will be useless, so we have bigger volume chamber which harnessed same energy like smaller volume chamber.
The smaller chamber will absorb certain quantity of energy and reach it equilibrium during this time frame, while the double size chamber, although it had absorbed equal quantity of energy, but it still hasn’t reached its equilibrium yet, and it still has the capacity to absorb more energy, but the time was finished.
But if the pressure rate doubled, the smaller chamber will reach its equilibrium quicker and will produce more heat and miss out on doing work, while the double size chamber will have the optimal volume in this scenario for maximum energy production, and that’s why the dynamic response -as we will see later- is equally important to the effective scaling.
So the energy storage is function of both, time and volume, and we have to factor in both those variables in order to conclude the energy.
We will name the chamber which has bigger volume than the optimal one for maximum energy conversion to work from specific pressure change, sub-isothermal chamber, so we can distinguish it from the chamber which has the optimal volume since both of them—practically speaking- can be classified as isothermal and convert most of the pressure to work than heat.
So the bottom line is, if we need to harness maximum energy from the incident wave, we should increase the volume, but more volume will require more time to convert the pressure to energy, then we will miss out on the energy harnessing, so we will be limited to certain volume maximum cap as per the changing pressure rate.
And if the pressure change is less or the period is longer, we should even reduce the volume more to harness the maximum energy from the incident wave.
Stacking the cylinders in the device in this setup will enable us now to increase the volume up to 10 times or 20 times and keep achieving the required response time to harness the maximum energy from the same incident wave on the same spot area.
Volume is the energy capturing element, increasing the volume by 10 or 20 times translates to increasing the energy harnessing by 10 or 20 times from the same incident wave by the same device and from the same spot, and increasing the volume vastly, couldn’t be done before in a single devise.
The cost of increasing the volume in this apparatus will be easily offset by the more energy production, since the overall cost compared to energy production will be greatly reduced, because the cost of energy production per cubic meter of this apparatus will be reduced compared to the other devices.
In other words, since most of the device now is merely empty cylinders which its cost is very cheap per cubic meter, and since these empty cylinders are the energy capturing element, so the overall cost due to the cost-effective method of scaling up will be reduced.
The dynamic response is the second core idea of this invention which we will explore in details later.
We can use the analogy of this system with spring where Hook’s low is:
And the simple harmonic motion period is:
The response time will be the same for big and small K with same force proportionality since the ratio is constant, the spring constant K is analogous to the air volume and mass m or force F is analogs to the pressure, but the analogy ends here.
The spring constant which measure how stiff the spring—basically it’s a number which tells how much force is required to stretch or compress a spring by certain distance—is analogous to the gas compressibility—the bulk modulus of the gas- and volume together, but it’s governed by different and more complex set of laws.
Every process of gas compression or expansion will give different results, we need to achieve the process which produces work only and this will be the isothermal process, i.e., we need T to be always at certain value, any change in the pressure should always be met with change in volume—or other parameter as we will see later- to keep this constant value of T, bigger T will produce sub-isothermal and miss out on the energy, smaller T will produce more heat than work.
So same we need to maintain the ratio by balancing the other variable if the first one was changed, same goes for the air compression to maintain isothermal process and maintain T constant value by balancing the rate of pressure change with the volume.
The chamber with more air moles will do more work if the process were slow enough to be classified as isothermal, but if the compression leaned toward adiabatic, the response time will heavily depend on the heat capacity of the air, the adiabatic process is very sensitive to how much gas and energy is involved.
As we reduce the chamber size to the most effective volume, friction and inertia of the piston would be the other main challenges since the liquid viscosity is fixed, that’s why the piston material should be as light as possible and its edge should be properly lubricated.
We will discuss the chamber size by splitting big vertical cylinders to many smaller chambers to maintain the isothermal process and have each one vertical line of these chambers’ piston connected to one central shaft, so we will get more shafts which will impose extra cost and complexity but the system will be bigger with less overall cost compared to performance.
The next big challenge which this apparatus will address is to maintain the appropriate response time for different waves characteristics.
Since every wave will impose different pressure and time frame which will require specific settings to achieve the best response time, so the static system will not be able to harness the same energy when the conditions changes from its specified settings.
Since most energy converting devices can capture approximately 20% to 40% of the energy from the incident waves, this device can significantly increase this percentage to more than 90% because of dynamic responsiveness.
To address this challenge, we will specify the effective parameters to change them dynamically in many methods to keep optimizing the response time to the required targeted value with every wave, and then we will conclude with the best practical method to be used.
Because if we left the apparatus static as it is, its response time will be perfect for only one specific condition, so we will miss out on most of the energy to be harnessed in the other different conditions.
The third core idea of this invention is to convert the kinetic energy of the coming wave to potential energy, we can use many methods -as we will see later- to increase the height of the wave before it reaches the spot area of the device, although we will lose some portion of the kinetic energy in this process as friction and refraction, but since this device can’t harness the kinetic energy anyway, so it will be greatly advantages to convert as much as we can of the kinetic energy to potential energy.
This can be done by manipulating the wave in many methods, like installing barriers with half wave length distance between them to create interference pattern and install the device in the super position spots, or by converging the waves by two barriers like funnel to focal point were the waves height will be increased then we install parallel barriers to confine these waves height inside this corridor, or we can install slope ramp on the seabed with specific angle to increase the shoaling effect.
Since we are concentrating the energy in smaller area, so the energy intensity will increase, and most importantly the potential energy which we care for the most, since its increment will lead to exponential increment in the energy production, hence these wave amplifications cost will be recovered by the exponential energy production.
By employing one of the suggested methods, this device can extend the locations list where it can be efficiently installed to serve dense population communities near the coastline.
Since the height of the wave is proportional to square of its energy, so if the height doubled, the harnessed energy will quadruple, although we are harnessing 50% of the total energy of the wave, so in high swell this device will become very efficient and can produce the power at lower cost than the other renewables.
In this case the thickness and internal cylinder’s reinforcement structure should be designed to harness the specified range of waves, and if the wave height will exceed this limit, then the stoppers will prevent the piston from further displacement.
This method will be very safe compared to the on surface devices which may never be able to suppress the extra dynamic force.
For the ease of explanation, we will explain the apparatus with its components and functions then the operation in the static settings first for specific wave, and later we will delve deeper to discuss the dynamic response and the changing parameters with the right logarithms for the dynamic response to end up with the most practical method, at the end we will explore many methods to manipulate the wave to increase the potential energy and install the best solution in front of the apparatus.
This invention holds promise for efficient and cost-effective harnessing of wave energy, contributing to more sustainable future.
Specifications for the Apparatus in Static Settings:
System Components & Operation
Components and Functions
- Cylindrical Air Chambers:
These vertically-aligned air-filled cylinders with movable pistons can have two solutions:
First solution:
These cylinders have specific quantitative reduced volumes form bottom to top, each one has pressurized air as per its depth average equilibrium, and all of them has the same area and same piston area too, they are vertically stacked over each other, (As shown in figure 3. drawing #1)
Second solution:
These cylinders have the same volume and cap area, and each one is pressurized to the targeted level as per its designated depth, but since each one is located at different depth, then each one will do different work and exert different force on its piston with different displacement, and in order to unify this displacements, we will quantitatively reduce the area of each piston from top to bottom in order for all pistons to do different works but to produce same displacement, the different forces produces in this setup will not impose any hurdle since the design utilizes the displacement only, (As shown in figure 3. drawing #2).
In other words, all same size cylinders will experience same pressure changes because they are vertically aligned and they will exert same internal pressure on the same area pistons, hence exert same internal force on each piston and push it for the same distance, but since cylinders exist on different depths, meaning the water will exert different external pressures, specifically, the external pressure will increase as go deeper, so the net force on the pistons will decrease by depth because of the increasing external force against the same internal force, meaning every piston will experience same internal force with increased external resistive force with depth, which will cause it to be displaced for less distance and do less work, these different displacements will create discrepancy for the central shaft and we need to unify them, so we have to reduce the force quantitatively on each piston by reducing its area as per its depth to let each one do different work by exerting decreased force from top to bottom but do the same displacement.
Since both solutions achieve the same objective, we will focus mainly on the first one, only to avoid redundancy, beside since it has the merit of smaller volumes at the tops which will make this solution slightly more sensitive to pressure changes, so the main reason to opt out of mentioning the second solution is only not to explain the same scenario twice every time, not because the second solution is less valid.
These cylindrical air reservoirs—can be in any other suitable structure—can be manufactured from stainless steel or hardened steel to withstand the exerted pressure without being deformed, but the in order to solve the problem of corrosion, the best option is not to face it at all and use alternative materials.
Any other suitable non-corrosive material can be used if they can withstand the pressure and marine environment, materials like—but not limited to—GRP, PVC, HDPE, FRP, acrylic or marine concrete with reinforcement rebars.. etc.., Since corrosive is one of the biggest challenge in the marine environment, so non-corrosive material will have big advantage in this regard.
Using slightly deformable materials like some of the mentioned up list, will require installing internal ring from very rigid non-deformable alloy at the range -position- of the piston’s oscillations, so it will not experience any resistance due to slight deformation in the cylinder structure.
To reduce the thickness of the cylinders, we can use internal supportive reinforcement structure which will be very important to support the cylinder’s structural integrity under pressure in order not to collapse or deform, this design will prevent buckling or bending of the outer walls, doing this, will significantly reduce the cost,—the cylinder’s internal supportive structure is not showing in the drawings since it could have numerous designs-.
Since most of this apparatus is mainly empty cylinders, and since these cylinders have to withstand the pressure changes only not the entire pressure of the water column, because their internal pressure of air will keep them in equilibrium, plus the internal reinforcement framework will significantly reduce the cost and these reasons will be the main factors in deciding how cost-effective and competitive this devise will be in the final math because the very thin wall due to non-heavy duty function when fixed in depth, will require much less materials and may significantly reduce the cost.
The energy of the wave will quadruple if the height of the wave was doubled, so more energy will translate to more pressure fluctuations, and since this increment is exponential, so the force on the cylinder and its piston and internal supportive structure will significantly increase, so the system should be designed to handle specific range of energy, and beyond this range, the stoppers will prevent the piston from further displacement and the thickness and internal supportive structure will be able withstand this extra pressure.
As we mentioned earlier, what we mean with isothermal in this system is the maximum work harnessing in the given time frame, so technically we mean the optimal response time which achieve this task not the literally completely isothermal process, so in this system the heat will be even produced at what we refer to as optimal isothermal or optimal response time, and since heat is inevitable, so if we chose non-heat-conductive materials, we should factor in the heat increment and heat exchange rate even in optimal response time.
Appropriate protective coating, anti-fouling paint—or technology like ultrasonic—should be applied on the submerged reservoir’s surfaces to prevent the unwanted growth of organisms like barnacle, algae and slime etc.
Marine coating can be like epoxy coating, polyurethane coating, vinyl ester coating or using methods like cathodic protection or sacrificial anodes as one of many other options, applying silicone-based coatings which makes the surface slick and slippery to prevent the organisms from adhering to the surface will be good choice, if the biofouling were attached to the surface, they will tend to detach easily when there is movement or cleaning.
Each cylinder is mainly two parts, the circular wall with the top cap and the movable piston at the bottom,- this configuration will be adopted in the following explanation design, but off course it can be vice versa and the piston can be at the top, (As shown in figure 3. drawing #3).
Being on the top will have the advantage of doing more work due to less resistive external force, but in most cases we might opt out of this option as we will see later.
The piston can be anywhere on any shape since it will retract and protrude due to the hydrostatic pressure changes, but in vertical oscillation movement it should be on the top or bottom to serve the motion conversion process.
We will consider cylindrical shape in this explanation since it has omni-shape and can harness the wave’s energy from all directions beside it will be practical shape volume wise—occupy less volume with minimal spaces in between for the overall apparatus volume- and to withstand the ocean’s deep currents, or the circular motion of the water particles near the surface regarding the high cylinders near the sea surface with minimal drag force.
The top cap of the cylinder has an opening at the center that allows the central shaft to slide in and out freely through this opening with the designated distance range, this opening should be properly lubricated to reduce the friction to minimal level for not to hinder the response time.
A suitable protective flexi sealant will be connecting the oscillating shaft with this opening at the top of the cylinder to ensure complete water insulation.
Each piston is firmly fixed to the central shaft at the center, so they all make one unit that moves up and down together with unified oscillation.
The cylinder body—the cylinder wall and top cap- is firmly fixed in position on firmly anchored steel structure—or any other suitable mooring mechanism like tensile cables—so they don’t move at all, leaving the freedom of motion for the pistons only which are connected to the central shaft to oscillate upward and downward.
Each cylinder will have thicker wall from top to the bottom, the deeper the cylinder is positioned, the thicker its wall should be, in order to withstand the increasing pressure, but this thickness can be reduced with the best engineering solution for an internal reinforcement supportive structure that makes the cylinder more resistive to pressure.
Theses cylinders will have decreasing height -hence decreasing volume as first option- as we move from bottom upward in order to cause the same piston oscillation amplitude, because if all cylinders have the same volume at different depths, then they will do different work regarding piston displacement as the water column height changes, because each one is positioned at different pressure, so each cylinder’s volume will change differently leading to different pistons’ displacements in their positions, which will create inconsistency in the central shaft’s total force and dissipate most of the force instead of creating consolidated constructive forces to add up to unified output on the central shaft.
The filled air should balance the water pressure for each cylinder as per its designated depth, the bottom cylinder have more volume, so it will do more work on the gas since it can harness more energy from the incident wave, but it will oscillate with less displacement and hence do less work on the piston because it is moving under more pressure so it will require more energy to exert the same force as we go deeper, as we move from the bottom cylinder upward, the work done by the gas in each cylinder will be decreasing, because the volume of each cylinder is decreasing, in order to decrease the oscillation displacement to match the bottom cylinder, so all pistons will oscillate with the same displacement, hence reducing the volume comes to play to unify the different works done on the gas to become same work done on the piston, so all the pistons will oscillate with the same synchronization and for the same displacement.
For example, if two cylinders with same volume, first one is positioned at 1 m depth under the water and the second one under 12m depth, the second one will contain almost double the air moles than the first one and oscillate with half volume change -half piston’s displacement- and it will do the same work on the gas like the upper cylinder, but this work at this depth will produce half the force on the piston compared to the upper one.
To maintain the same volume reduction and expansion -which will cause same displacement for each piston—for each cylinder to be in line with the targeted oscillation displacement, so no piston can move pulling the central shaft with it faster or slower than the other one, all will have synchronized oscillation with unified designated displacement, with decreased pressure as we move upward.
The other influence—although it is minor- on the required unified volume oscillation will be imposed by the gradient temperature decrement as move down due to the differences arise from the water temperature from the ocean surface as we go deeper, because of this fact, we should consider air filling with even less air moles according to the designated amount of volume fluctuation from top to bottom cylinder, since the extra temperature will impose slightly more pressure which will lead to more forces applied on the pistons at the upper cylinders, and by factoring in this slight volume reduction, it should not affect the designated oscillation displacement.
If we achieved the required response time to consider this system complete isothermal -we are explaining this system in static condition for specific wave for the time being, but later on, it will be dynamically seeking and achieving the isothermal process for different waves-, then we can use the following formulas to decide the air moles count in each one -hence the volume for each cylinder-.
As per Boyle’s low and since we need to dictate the final volume after contraction for each cylinder, so we need to decide the filled air moles in the initial volume before contraction
where:
- Pi is the pressure on the piston before expansion (in Pascal)
- Vi is the volume of the cylinder before expansion (in M^3)
- Pf is the pressure on the piston after expansion (in Pascal)
- Vf is the volume of the cylinder after expansion (in M^3)
The ideal gas formula:
where:
- P is pressure (in Pascal)
- V is the cylinder volume (in M^3)
- n is the number of moles of gas (in moles)
- R is the gas constant (8.314 J/mol*K)
- T is the absolute temperature (in Kelvin)
So the air moles count inside the cylinder will be:
The air moles inside each cylinder will be calibrated for optimal response time and to harness the maximum energy from the incident wave with specific characteristics as per its allowed time frame which is creating specific pressure change rate.
So we should calculate the mean average wave height in the installation area and specify the air moles and the volume as per this average, and when the system becomes dynamically responsive, it will cover the targeted range to harness its wave’s energy effectively as per its capacity around this mean average.
If smaller wave—low pressure rate change- is passing over, the response time of the cylinder will be slow and not enough to capture all the energy of the incident wave, and if the passing wave is big—higher pressure rate- the response time will be quicker than the required response time and the system will even nudge toward the adiabatic process, that’s why we need the dynamically responsive system.
The piston will be positioned at the bottom of the cylinder, the cylinder side wall height should be adequate as per oscillation maximum amplitude beneath the piston mean average position in order for the piston’s oscillation will only take place inside the cylinder during the maximum piston displacement positions inside the cylinder, stoppers will be fixed at the cylinder’s internal wall to exert constraint force which is normal force to prevent the piston’s oscillation more than the designated amplitude.
The cylinders should have wide diameter as possible and little height, the more the diameter is, the more energy we can capture because of more volume, but considering the effective spot area of wave height on the surface, the most effective width will vary according to the wave or swell characteristics—which we will be discussed later -, but practically speaking the diameter of the cylinder can be about 3.5 m in average.
Increasing the diameter of the cylinder more than the effective area, can cause the cylinder to experience parts of both the trough and crest or misses out on the most effective area to harness the water column changes as per wave length—horizontal width from crest to crest -, missing out will lead the cylinder to harness less energy from the incident wave, since the device will be installed near the coastline where the shoaling effect will take place, and this means higher water column with shorter wave length.
The buoyancy center and gravity center—for both the cylinder and its buoyancy counter weight—will always be in balance for all cylinders which fixed by the chosen mooring system, and these two centroids will be vertically on the same line and in balance all the time and will not impose torque or any load fluctuations on the fixing structure.
Since the surface to volume ratio decreases as the volume grows bigger, so we can increase the volume of the cylinder then divide it by smaller thin partitions inside the cylinder to create more chambers, the thickness of these partitions will be less, since the internal pressure difference is less, and the cost of the cylinder will be less due to less surface area required material for bigger volume, (As shown in figure 3. drawing #4).
So each cylinder or reservoir can be more than one chamber with its designated piston, and each one vertical line of these chamber’s pistons will move independently from the horizontally next one and together as one unit in the vertical line, and their forces output will be harnessed by independent gear box –if we chose this PTO system-, but all gear boxes output will be harnessed by one generator using flywheel as moderator for example, this scaling will even drive the cost further down.
As for the second solution, since all cylinders have the same volume but positioned at different depth, so they will all do the same work by gas, but they will face different external resistance to the motion of the piston due to gradual higher pressure as we go deeper outside, so they will do increased work on each one’s piston from bottom to top leading to apply same force for longer displacements, and this will impose problem for the central shaft.
So to address this challenge we manipulate the variables of these simple formulas:
And by reducing the area of the pistons for the lower cylinders which are doing less work on the piston, then we will be reducing the force, and since the work is fixed in this case, so the distance will increase.
The cylinder can have many other ancillaries like one way check valve, internal sensors etc.
Since these vertically stacked cylinders are filled with air and submerged under water, the buoyancy force will be huge, that’s why the fixing structure with its foundation should be suitable to withstand such big force, another method to put high density material on the top and sides of each cylinder to increase the downward gravitational force to oppose the buoyancy upward force and reduce the load on the fixing structure which can reduce its cost.
- 2.
- Piston -the Actuator:
The movable piston is located at the bottom of the cylinder—but it can be on the top- and it will oscillate upward and downward as per the incident wave’s crest and trough imposed pressure.
One important feature of the piston is to be manufactured from light, hard, non-malleable and non-deformable material, extremely rigid to ensure no deformation, denting or bending will take place.
The material rigidity will ensure the cylinder’s volume change is transferred into motion of the piston inward and outward instead of bending or denting in order for the entire volume change to cause piston displacement rather than being deformed in place.
Since cylinder volume and piston’s mass are both proportional to the response time, so it will be advantageous to reduce the piston mass to maximum limit without sacrificing the required characteristics in order for the volume to increase on the expense of this mass decrement, because after all, the air is the element who is doing the work, this will be very important as the system reaches it maximum response for the small waves, the mass of the piston will be one of the dynamically changing elements as we will discuss in the dynamic response.
We can place the piston on the top as another option (As shown in figure 3. drawing #3), this will have great advantage of doing more work due to less external resistive force because of less depth position for every piston, but since we may need to place the buoyancy counter weight on the top of the cylinder, or the horizontal beam of the fixing structure will be installed on the top of the cylinder to exert normal force against buoyancy force, we have to opt out of this option.
On the other hand if the piston and its connecting flexi sealant was at the top, in the marine environment, the floating organelles will be so dense, so the biofouling as result and the decomposing of bigger size living beings as it accumulates and chemically decomposed on the piston’s surface and its connecting flexi sealant will be greatly affected, hence there chemical property will change and degrade at faster rate.
Beside the cylinder volume and the piston area addressed earlier, the hysteresis arises due to friction, fluid dynamics and properties of the involved materials.
The piston will experience friction as it moves inside the cylinder, this friction will create resistance to motion leading to lag in piston’s movement as the pressure changes, this lag is undesirable unlike the other deliberately introduced hysteresis, since the friction force will be lost.
When the piston moves it has to overcome the static friction before it moves, and when pressure changes, the piston will not reverse motion direction immediately due to kinetic friction, which will lead to lag or phase shift in piston’s movement relative to pressure changes.
Also the mass of the piston plays important role, since inertia means resistance to motion, when the pressure changes rapidly, the piston will take some time to accelerate, which will cause delay to be factored, in some cases we need to introduce delay to harness more energy by increasing the mass of the piston as we will see later, this introduced hysteresis force will not be lost like the force of the friction.
And when the pressure drops, the piston will not stop moving and reverse direction immediately since it has momentum, and this will also create lag.
Viscosity and mechanical damping beside the drag imposed by the piston speed in water will also increase the response time and these forces also will be lost.
Friction, inertia and damping will significantly affect the response time and introduce unwanted hysteresis, the piston’s response to pressure changes will depend on overcoming these resistances which will make it respond slower and increase the lag.
So to address these hindering factors, the piston path should be properly lubricated to minimize friction, and the shape of the piston should be with minimum drag coefficient, and the speed of the piston should be slow as possible because drag increases exponentially with speed.
When the wave’s trough passes over the cylinder, the cylinder starts to expand until the piston will be completely protruded—suppose maximum trough the system can withstand—exerting downward force during this expansion to enable the central shaft to move as per the piston displacement, the opposite scenario will take place upon the wave’s crest is passing over.
Giving the piston’s slender profile, there is a risk of it tilting or veering off its intended cylindrical oscillatory trajectory, in this case we can either increase the thickness of the piston on the side, or we can install lateral surface—thin rigid ring with adequate height—on the edge of the piston to increase its contact surface with the cylinder in order to oscillate smoothly in its path without deviation or tilting.
So this lateral surface should also be made from rigid non-deformable alloy and will be oscillating inside the rigid alloy ring which is fixed internally inside the cylinder, this area should be always properly lubricated, these alloys should be suitable to withstand friction for long time without tearing or wearing, the range of piston oscillation should be within the range of this rigid ring and the stoppers will protect the pistion from moving out of it,—this illustration not mentioned in the drawings -.
- 3. Central Shaft:
The central shaft is fixed vertically to the center of each piston to harness all its upward and downward displacements and apply the collective work done by these pistons on the energy harnessing unit which is located at the bottom cylinder resting on the seabed.
Since inertia will increase hysteresis which is not desired with slow rate of pressure change, the mass of the central shaft should be as small as possible, besides being rigid and made from marine suitable material since some parts of it will be exposed to sea water.
- 4. The Air Inside Cylinder:
Each cylinder has specific air moles inside it as per its pressure which is dictated by its height over the seabed , this air will be compressed like spring and store potential energy when the crest is passing over—the water column height increased-, then it will release this energy when the trough comes over its spot.
The air bulk modulus is analogues to spring constant, if we want more sensitive spring, we should reduce its constant, and similarly, if we want more sensitive gas than the air, we can use gas with less bulk modulus value like helium.
If the wave interference pattern is dominant at the area of installation, and the water column changes over smaller spots and these changes has shorter time frames, the air volume with the cylinder’s diameter should be reduced accordingly.
- 5. The Piston’s Connecting Flexi Sealant:
This is double sealant system, internal and extranet, each one filled with lubricating oil and these two pockets are connected together via small opening in the piston to keep the pressure of the two small formed pockets -trapped volume- containing the oil, always in balance, (As shown in figure 3. drawing #5).
The external flexi sealant connects the piston edge to the bottom of the side wall of the cylinder to prevent the water from entering to the cylinder, this sealing fabric is made from suitable material which can withstand the harsh marine environment and facilitate the motion of the piston without hindering it.
Another flexi sealant will be installed inside the cylinder and connected to the piston, its trapped volume will also be filled with the same liquid lubricator.
The liquid lubricator should be with low viscosity in order to ensure maximum smoothness in the piston movement and reduce piston friction with the cylinder which will cause hysteresis.
This liquid will always be under semi constant internal pressure, since liquids aren’t compressible, it will immediately apply the changed pressure to the oil in both chambers equally since liquids transfer pressure faster than gas, so the pressure on the piston areas in touch with the oil will always be in balance and there will be no changes in the internal pressure since those two pockets will always be in equilibrium, hence it will cause no opposing force which will lead to hysteresis.
The low viscosity oil pockets will be connected through small opening in the piston, and as it moves up and down, the oil will flow between the two pockets back and forth and hence there volumes will keep changing, since liquid is uncompressible and respond immediately to the pressure changes, this process will distribute the pressure evenly over the contacting surfaces and the connecting internal and external flexi sealants, providing a continuous lubricating film between the piston and the cylinder internal wall, when pressure fluctuates on the lubricant oil in these two small chambers, it will be balanced immediately due to liquids nature in fast transmitting the pressure, then the pressure on the flexi sealant will always be in balance, so it will not be folded and get between the movable piston and its contacting surface.
Since we have balanced the pressure on the connecting flexi sealant fabric, this will give us more freedom to choose among more materials, unlike the scenario where we employ the rolling sealant, then we will be limited to specific materials with its life span beside the hysteresis level it will introduce.
Now we can choose more robust material which have very long lifespan and wouldn’t be affected with marine environment like the Nano carbon fiber fabric, this is extremely strong material and will prevent the oil from leaking out and wouldn’t be raptured easily.
This method with the appropriate material will increase the lifespan of the sealant fabric and reduce the hysteresis which is the most important challenge we need to address.
The complexity and cost of this method compared to the widely-used and well-established method of the rolling sealant will be offset by its more merits.
Off course the well-known method of rolling sealant can also be used as a readily available option.
- 6.
- The Shaft and Cylinder’s-Top-Cap Connecting Flexi Sealant:
This same sealing system like the previous one and it connects the cylinder’s top area to the central shaft oscillating upward and downward through it to prevent the water from getting in and the air from going out of the cylinder.
Also it is constituted of internal and external pockets filled with lubricant and wrapped with flexi sealant fabric to seal the cylinder and to balance the pressure on the piston and smooth the motion.
- 7.
- Piston Stoppers:
These plates are firmly fixed inside the cylinder over and under the piston to exert restrain force to prevent it from displacement over the designated limits, the maximum limit corresponds to the maximum displacement the piston will make as per the maximum wave height it can withstand in order for the piston not to move out of the cylinder boundaries or overload the PTO system.
These stoppers preferably to be as two rings inside the cylinder to exert the normal force on the entire edge of the piston in order to distribute the mechanical tension over bigger surface.
- 8.
- Sensors:
Appropriate sensors as required will be installed inside each cylinder in order to monitor its conditions, these parameters will be an important part of the data to be fed to the logarithms to control the dynamic response as we will see later, for example pressure sensor inside the cylinder, beside the useful data for the logarithms to work, it can determine whether there is leakage in the cylinder.
If the water started leaking into the cylinder, the corresponding sensor will signal special safety gate in the cylinder to open in order to let the water flow into the cylinder to keep it in equilibrium, so the water will not be trapped inside the cylinder and create pressure imbalance which will hinder the piston movement in this case and affect the entire system since all pistons are connected to single shaft, so the other pistons will still be operational while this piston is broken down and oscillate in water.
Other sensors can be installed like temperature sensor to monitor the temperature inside each cylinder, horizontal position sensor to monitor the verticality status of the apparatus to determine the tilting condition of the cylinders especially during ocean currents in case they were fixed using tensile cables.
The required power for these sensors, ultrasonic device prevent the biofouling and the dynamic system equipment be will be extended to each cylinder from the PTO unit at the bottom.
- 9.
- Buoyancy counter weight:
The buoyancy force is a real challenge in the device, the bigger the volume, the more challenging this problem becomes.
Depending on the mooring method we will choose, we can specify the quantity of this force, if we chose the fixing structure, then the main load to counter the buoyancy force will come from this fixing structure and it foundations, yet we still can add some weight to reduce the load on this fixing structure, this method will reduce the gap between the cylinder since there will be no volume occupied by the weight.
But if we chose the tensile cable mooring method, then this buoyancy counter weight will be the main force which counters the buoyancy force especially if the tensile cable or chain strength is not entirely adequate to counter the buoyancy force.
These weights will be placed on the cylinder, whether on its top or side, placing it on side will be very advantageous to reduce the overall device height, this weight will exert gravitational downward force to counteract the upward buoyant force in order for the cylinders not to exert huge upward force on the tensile cables.
These weights preferably to be from dense and cost-effective material to reduce the volume it will occupy, but since dense materials will be costly, so practical solution can be sand bags to be placed on the top of the cylinder, in this case its upper surface will have ring shape boundary around its edge to accommodate this weight.
The height of this boundary should be adequate to accommodate the weight as per its relatively big volume.
The drawback of this method, this weight will occupy volume when placed on the top of the cylinders, so the overall height will increase, which is big disadvantage for the efficiency.
- 10.
- Energy harvesting unit PTO:
This unit is located inside the bottom cylinder resting on the seabed, although we will delve into the diversification of energy harvesting methods, but we will briefly summarize some of them here.
The first option PTO system and the most efficient solution is high torque gearbox—high gear ratio—connected to the oscillating central shaft, as the first high torque and slow motion disc is connected to the central shaft, the final fast spinning disk will be coupled with the generator, this solution will have the highest energy conversion ratio, but it is more susceptible to mechanical failure and will be maintenance demanding solution.
The most practical solution is to let the piston pressurize sea water in a vessel to let it flow through pipe where underwater turbine is running, but the big trade off this solution has way less energy conversion efficiency since tidal turbine are approximately 30% to 50% conversion ratio, so if simplicity and nonexistence of complicated mechanical parts are the objective, then this solution can be considered.
All the other electrical components will be inside this unit, so only the cable will extend out of it to the main unit for all devices in case of many systems installed or directly to the seashore which is the final destination where the power will be delivered.
Another way to harness this power is by compressing air in chamber then uses this compressed air to do work, like generating electricity.
- 11.
- Fixing structure:
These fixing methods are to fix the cylinders in both vertical and horizontal position over seabed, a heavy foundation made from ecological & ocean harmless material will be installed to firmly anchor the erected apparatus and provide the required downward force for the fixing structure.
First method is to use steel structure—or any other suitable material- which will accommodate and fix all the cylinders, this structure is designed to exert adequate force on the cylinder to counter the buoyancy force and to withstand the ocean under water current and the hydrostatic fluctuating force on the cylinders which will prevent them from oscillating up and down.
The second alternative method to anchor the cylinders is to connect them together with long steel pipes for example along with the energy harvesting unit and make them all as one long unit, then connect this vertically installed device via high tensile strength cables—marine synthetic cables- to the heavy foundations points or anchor bolts on the seabed to fix it in position and prevent it from tilting and horizontal swinging, this method preferably to use the buoyancy counter weight in order to reduce the load on the tensile cable beside it the minimal foot print on the seabed.( As shown in figure 3. drawing #6).
This tethering method has the advantage of being easy straight-forward and cost effective, and it could be the preferred mooring method if the buoyancy counter weight height on the top of the cylinder was short.
Another mooring method is we can assemble the device as one long unit and balanced with adequate weight to stay floating under very specific depth, but the weight shouldn’t reduce the buoyancy force more than the hydrostatic fluctuation, i.e the tensile in the cable and the upward buoyancy will stay more than the downward force imposed by pressure changes, otherwise the device will move up and down with the wave like all free floating living beings at certain depth, so some of the pressure will be lost in this case due to the change in depth and the system will seek to stay in pressure equilibrium by moving up and down rather than being pressurized in its position, this method will be preferred where the marine environment is rich and we should avoid installing anything on the seabed in order not to disrupt the marine ecosystem, or where the desired installation spot has relatively deep seabed.
This method has very important feature where we can connect the fixing cables to rotating pulley or roller and it will rotate via remotely control motor to wrap the cable on it and shorten or lengthen the cable and hence let the device float higher or lower under the sea surface, so the cables will be lengthened during small waves to let the device float at higher altitude over seabed to stay as close to the surface as possible to reduce the pressure of depth which will act as opposite force and reduce the energy output, and the cables will be shortened during the high waves to pull the device down so it will not be exposed to the surface and will stay as close as possible to the surface.
The cost of more complexity will be offset by more energy conversion, this dynamic mechanism is very important to keep harnessing maximum energy.
And to reduce the required weight, we can install long anchor bolts on the seabed where it will impose minimal impact on the marine ecosystem and connect this floating apparatus to these firmly installed anchor bolts with suitable tensile cables to exert tensile force that will adequately oppose the buoyancy force.
The best anchoring system is to be decided as per each location conditions and cost considerations.
- 12.
- Foundation:
This foundation should be made from echo environment materials, in order for the apparatus to be erected on it, it will be important to the mooring system since its weight will provide the required downward force to system against the buoyancy force.
We can also use anchor bolts with Fischer shape and insert them deep in the seafloor and use them as fixing points.
System Operation:
Incept:
The total pressure at a given depth P is the sum of the hydrostatic pressure -due to water column height- and the dynamic pressure—from the incident wave which creates the orbital motion of the water molecules which has kinetic energy to create this pressure-
where:
ρ is the density of water—about 1000kg/m3
g is the acceleration due to gravity
h is the depth of the submerged object
is the dynamic pressure fluctuation from the wave which decreases with depth according to
So if the top cylinders were close to the surface by less than half wave length, they will experience more pressure fluctuations and thus will undergo more changes in volume as the wave passes over, and each one’s total pressure should be calculated as per the total pressure formula mentioned up.
But if the top cylinders depth was more than half wave length, the dynamic pressure will be zero theoretically.
So, if the top cylinders were experiencing the dynamic pressure, the volumes of the cylinder should be calibrated for unified oscillation displacement as per the mentioned up formula.
But for the ease of explanation we will factor in the hydrostatic pressure only which is the major influencer specifically if the apparatus is reasonably far from the surface.
When the wave approaches the shallow water, its height will increase, this is due to the process of wave shoaling, where waves typically slow down and their wavelength’s decreases as they move from deep to shallow water, as the wave slows, its energy is compressed into smaller area causing the wave height to increase.
This effect is very important for this apparatus, since the suitable spots for installation will be near the coastline where the shoaling effect becomes very advantageous.
In deep water, waves moves faster because they aren’t affected by the seafloor, as they approaches the shallow water, the seafloor interferes with the wave motion slowing down the wave, the energy of the wave remains constant, but since the speed decreases, the wave height must increase to conserve energy.
Swells height varies significantly and range from 1 m to more than 4 m, in typical conditions in some areas, the average significant swell height—which is the mean height of the highest third of swells in a given period—can provide approximate information about swell height fluctuations, but on average the swell often between 1 to 4 m which will create water column changes between 1 to 4 m due to the change in water column height between crests and troughs.
In the following explanation we will consider the regular wave scenario which follows regular sinusoidal wave function F(x)= Sin(x)—where angle x is measured in radian as input and return the y coordinate of the point on the unit circle which corresponds to that angle- without the wave’s overlapping and interference to create constructive and destructive patterns, although the system will still be operational in this conditions because it is dynamic as we will see later, since sea waves are complicated to be analyzed and include many factors to be considered, starting from wind speed and intervals to wave directionality and interference patterns, but for the ease of explanation we will consider ideal sinusoidal wave.
In the following calculations, we will approximate the atmospheric pressure to 100,000 Pascal, and we will approximate the water pressure imposed by one meter high water column to 10,000 Pascal.
Also we will consider the wave amplitude (x) will cause the maximum displacement the piston can make, so each piston will be oscillating between its designated two stoppers inside the cylinder, so the following explanation is for ideal scenario only, and it will neglect the practical energy loss due to frictions and system imperfections etc.. in the real world which should be factored in when the full feasibility is being assessed, so the results are for theoretically perfect scenarios only, since complicated wave patterns and other resisting factors will require more accurate modeling methods and dynamic response which we will discuss in details later.
Operation:
As per firgure3. drawing #1.
During the swell trough the water column height over the area of all the vertical cylinders will be at minimum level, so each cylinder (1) will be at its maximum volume, and each piston (2) will be completely protruded to lowest position inside the cylinder(1), the central shaft’s bottom part (3) is at the lowest point.
As the water starts rising due to the beginning of crest, the cylinders (1) volumes will start to decrease as result to the increasing pressure imposed from the water outside on the cylinders by the increasing water column height, and the pistons (2) will start retracting and start to compress the air (4) as result to the increasing outer pressure on the pistons which will reduce the volume of the cylinders (1) pulling the central shaft (3) upward with them with force equal to the combined forces of pistons combined, and for the same displacement, the central shaft (3) will transfer this work—force with displacement—to the energy harvesting unit (8), (As shown in figure 3. drawing #7).
Since all pistons (2) are retracting at the same speed and for the same distance, they will exert their different forces with synchronized pace on the central shaft (3), so these forces will add up constructively since no piston (2) is retracting in slower motion or in opposite direction.
Each cylinder (1) will experience the changes of two forces as the water column changes, the changing hydrostatic pressure, and the buoyancy force change due to the cylinder’s volume changes.
The bigger force is the hydrostatic fluctuating pressure and the buoyancy force will be considerably less than the first one, but the change in buoyancy force will be opposing the change in the hydrostatic pressure force.
The decrease in the opposing bouncy force at the crest phase will be as result to decrement in volume, so the upward buoyancy force will be decreased and this decrement value of the force will be subtracted from the upward force as result of the hydrostatic pressure increment.
The buoyancy force is not distributed evenly on the submerged object’s surfaces, this upward force will be more concentered at the bottom side of the object and will decrease to the buoyancy centroid, then it will be downward force as we move to the top of the submerged object, that’s why if the piston (2) was positioned at the top it will exert downward force, but its downward force when the volume of the submerge object decreases will also be decreased.
Due to the pressure distribution of the buoyancy force on the surface of the immersed body, and since the pressure acts on every point of the submerged body and its vector always pointing to the buoyancy centroid, so only the 50% lower part of the immersed object will exert net upward resultant force toward the centroid of the buoyancy due to the higher hydrostatic pressure, the upper 50% will exert downward force toward the centroid of buoyancy, the resultant buoyancy force of downward & upward forces on the submerged object is net upward force because the pressure is always more at the bottom and less at the top of the submerged body.
Suppose we have an immersed sphere, the resultant hydrostatic pressure exerted on all the surface points at the top hemisphere pointing down to the centroid of buoyancy, that means it exerts no upward pressure what so ever, while the resultant hydrostatic pressure exerted on all the bottom hemisphere’s points on the surface area is pointing up to the centroid of buoyancy, that means this surface points is the only ones that produces the upward force.
So the net upward buoyancy force is the subtraction of the resultant of those two opposite forces, i.e., the buoyancy force is the vector sum of all these individual forces acting on the surface of the submerged body, it’s not simply a single upward force acting on the bottom.
Since the change in water column will affect those two opposite forces to the centroid equally, so the change in buoyancy force will be evenly distributed over the enter surface of the cylinder, regardless which area is exerting what force quantity and what is the direction of its vector.
This system is closed thermodynamic system, but not isolated system, since there is no air is flowing in or out, and only energy being exchanged, so this is insulated system where energy can be exchanged in the form of heat but not matter with its surroundings.
Regarding what type of thermodynamic processes we can consider this system, considering 1 m height wave and 10 seconds wave period, in this scenario the volume is fixed –static and unchangeable- and specified for this change of pressure rate, while a true isothermal process (constant temperature) might be difficult to achieve in reality, but this is the process we seek to achieve it as much as possible, since this is the only process which its outcome is only work, that’s why the system is always dynamically changing some parameters to maintain the appropriate conditions for this process to be done as we will see later, while the isothermal process is hard to be fully achieved, but after all, the system will be practically closer to isothermal than adiabatic or sub-isothermal, bearing in mind the thermodynamic processes can vary significantly and nothing prevent the function in the P-V diagram from making any shape if the driving force was changing and it can be mix of more than one behavior of the main processes or totally different process with totally different function, the main four thermodynamic processes are the most common ones for most cases, not the only ones.
Breakdown of the Three Processes the System Will Experience
As mentioned earlier, what we mean with isothermal process in this system is the optimal response time to harness maximum work as per the allowed time frame, so the other part of energy which wasn’t harnessed as work will be converted into heat or missed, depending on the time of the process and the volume of the cylinder and other factors as we will see, practically, heat is inevitable in any gas compression process, the exact isothermal process is theoretical concept in physics since it will be every slow and takes extremely long time to exchange heat, so what we refer to here in the isothermal process term is the best process which produces maximum work as per given time frame, not the exact theoretical physical meaning literally.
Sub-Isothermal Process: The sub-isothermal is not different process from isothermal process and it’s only slower response than allowed, which will result only in missing out of doing work just because of the delay in response.
Isothermal Process: In an ideal isothermal process, the temperature remains constant throughout the process, this would require continuous heat exchange between the air chamber and the surrounding water, which may not be entirely realistic.
Adiabatic Process: In an adiabatic process, there’s no heat exchange between the system and the surroundings, this could be a closer approximation if the compression and expansion cycles are rapid with minimal heat transfer.
So, in this static scenario we will consider the system isothermal for ideal chamber’s volume as per the incident wave characteristics -with accepted approximation- and we can apply the Boyle’s law and isothermal formulas.
The ideal gas formula for isothermal process is:
The second part of the equation is fixed, while pressure and volume are free to change but their outcome should be always constant.
In an ideal isothermal process the internal heat is fixed, i.e., its internal energy is unchanged
Since the internal energy is fixed this means:
That means the work done is equal to the exchanged heat.
The P-V diagram will have rectangular hyperbola shape which follows the curve
Figure 4.
Isothermal Process PV Diagram.
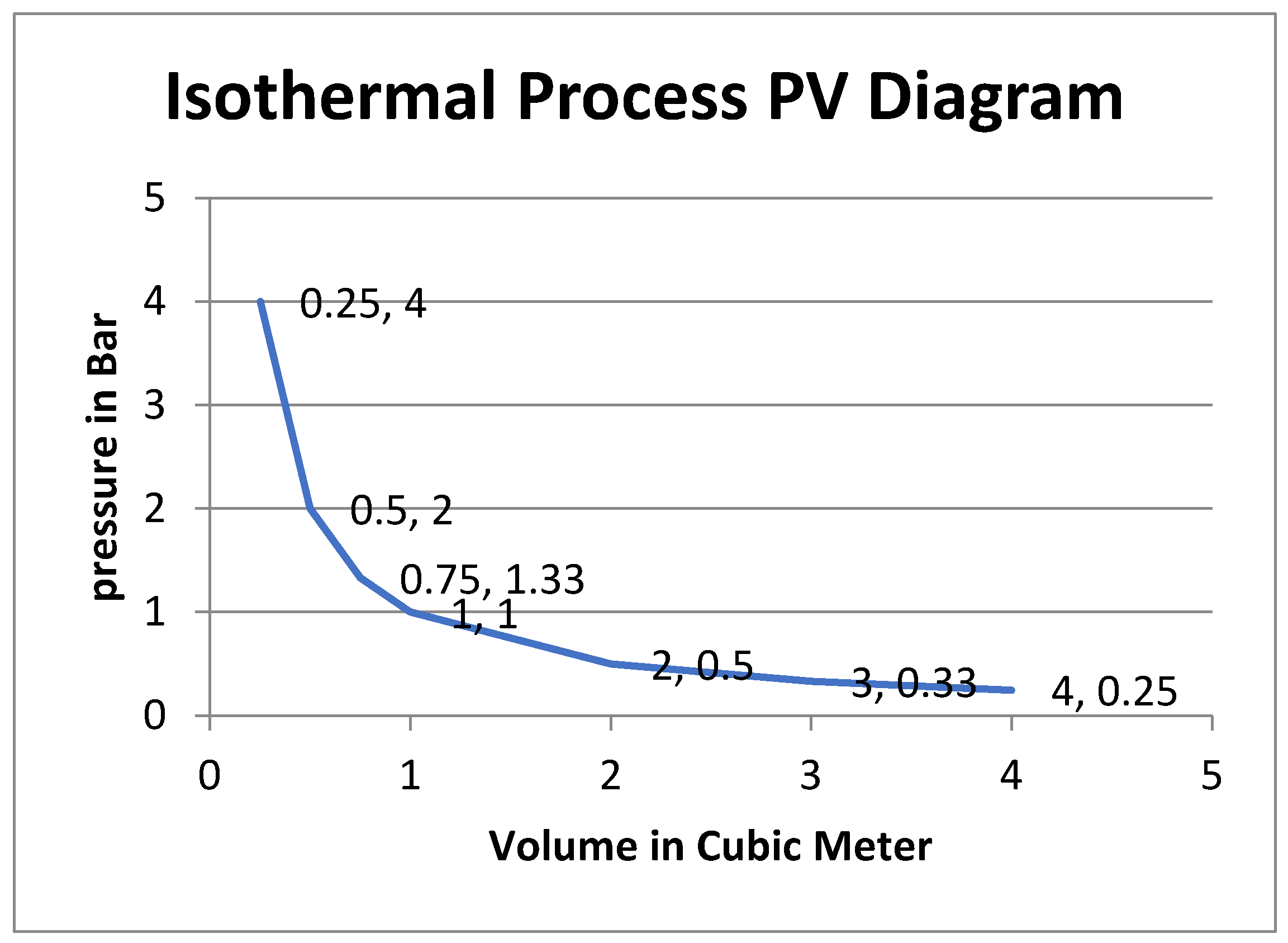
During this phase –crest phase- work has been done on the air (4) in the cylinder (1), so the work is negative.
The heat will flow out during the crest and it will flow in during the trough to compensate for the change in work in the system to keep the temperature fixed, hence the internal energy stays unchanged.
Since this isn’t an ideal isothermal process, so some heat will be lost in the process and the work done will be less than the optimal value.
Compressing a gas in a container increases its potential energy, the gas molecules with their kinetic energies are forced closer together, and the increased pressure acts like a coiled spring, ready to expand when released, so this compression induced by the wave crest will increase the potential energy of the air (4) in the cylinder (1) and it will do work when expanded.
Assume the cylinder (1) volume is 10 cubic meter—1m height and 10 square meter base area—and this cylinder center at 10m depth under the sea, so the pressure approximately is 200,000 Pascal, at sea surface pressure approximately 100,000 Pascal, so this cylinder volume will be doubled in size when brought to the surface.
The amount of air mole count to be filled into this cylinder at this depth to maintain this volume -10 cubic meters- in equilibrium is decided as per ideal gas formula:
where:
P is the pressure of the gas.
V is the volume of the gas.
n is the number of moles of the gas.
R is the ideal gas constant (R =0.08206R=0.08206 atm L/mol -K or R =8.314R=8.314 J/mol K in SI units).
T is the absolute temperature of the gas in Kelvin.
So the air mole count filled into the cylinder as per its designated depth will be:
And for 10 m water column height where the pressure approximately ≈200,000 Pascal
Other factors like heat inside the cylinder will affect the pressure and the total air mole count to be filled in it, this heat beside the gradient heat decrease with depth should be factored in with other pressure influencing factors in the final math.
So the cylinder (2) at this specific depth, will be filled with air moles as per this formula and pressurized to the designated volume—its volume should be 20 cubic meter on the surface with this air mole count inside to become in equilibrium—as per the targeted depth if it was prefilled on the surface, then after submersion, the water will exert same pressure externally on the cylinder and its movable piston and be in equilibrium at the 10 cubic meter volume as long as the water column is not changing, but since the waves are passing over, the hydrostatic pressure will change, hence the air pressure inside the cylinder (1) will change, because the external pressure of the water has increased and the its volume will change through its piston’s (2) displacement, seeking to achieve the equilibrium again.
The total hydrostatic pressure on the cylinders:
The hydrostatic pressure imposed by the water column is given by the formula:
where:
ρ Water density (approximately 1,000 kg/m³)
g Acceleration due to gravity (approximately 9.81 m/s²)
h Water depth at the narrow section of the cone
Then the hydrostatic pressure change is giving by the formula:
The force exerted on the piston due to hydrostatic pressure as per its depth—without considering the buoyancy force—will be:
where:
F is the force exerted by the piston (in Newton)
P is the pressure on the piston (in Pascal)
A is the piston area (in )
The net force on the piston is the difference between internal pressure and external pressure, so if the water column is fixed, there will be no change in the external pressure and the piston will be in equilibrium, and when the water crest is passing over, the external pressure will increase, so the external pressure will be more than the internal pressure and the net force on the piston will be the difference between those two pressures, so the higher external pressure will push the piston inward, and vice versa when the trough is passing over, the external pressure will be less the internal pressure and the higher internal pressure will push the piston outward as per the net force difference between the internal and external pressure on the piston.
The piston (2) is in equilibrium at this depth between the pressure of the water column outside and air (4) pressure inside, so the pressure is 200,000 Pascal from air inside and the opposite water pressure outside will keep the forces on it in balance.
And when one meter high crest is passing over this cylinder which is located at 10m depth under the sea surface, the water pressure will be approximately:
So the pressure difference on the piston is 10,000 Pascal, then the net force on the piston will be:
Assume water fixed temperature at 290 Kevin with no gradient decrease as we go deeper—in the real world scenario we should plug the real temperature in the formula as per the temperature gradient distribution and internal temperature change for each cylinder -, the volume will decrease and the new volume as per Boyle’s law will be:
So the piston will retract—move inward—by almost 5 cm and the cylinder will restore its volume equilibrium status.
Using the ideal gas formula to calculate the work done on the gas as per isothermal condition formula:
where:
W is the work done (in Joules)
n is the number of moles of gas (in moles)
R is the gas constant (8.314 J/mol*K)
T is the absolute temperature (in Kelvin)
V1 is the initial volume (in )
V2 is the final volume (in )
This equation incorporates the ideal gas law (PV = nRT) and derived from the relationship between pressure-volume work with constant pressure (W = PΔV) under the constraint of constant temperature (ln(P2V2) = ln(P1V1) for isothermal process).
Given:
Initial pressure (P1) ≈ 200,000 Pa
Final pressure (P2) ≈ 210,000 Pa
Initial volume (V1) = 10 m³
Final volume (V2) = 9.5 m³
Number of moles (n) = 829.51 mol (from previous calculation)
Gas constant (R) = 8.314 J/mol*K
Temperature (T) = 290 K (isothermal process)
Work done for isothermal process (W):
Using this formula will conclude misleading results, since it calculate the work done on the internal gas without considering the opposite pressure from the external water and the work done on the piston as result for that, to get the right result we should calculate the work done on the gas from the piston and subtract it from the work done from the water on the piston, in other words, we should factor in the internal pressure and external pressure on the piston to conclude the net force in order to get the correct result for work done.
The negative sign indicate work is being done on the air inside the cylinder since the volume is decreasing and the air (4) was compressed and stored potential energy, but the force on the piston is not correct without considering the external pressure, so the sign is correct in this case, but the quantity is wrong.
The corrected method to calculate the work done is to use the work formula:
With approximation for constant changing force function:
We can also directly estimate the energy production in the cylinder without doing math, since the unit of Pascal represents one Joule per cubic meter, so volume change of 0.5 cubic meters under average pressure of 5,000 Pascal will produce:
This will be the energy during crest phase, and for both phases the energy will be:
The internal energy of the air (4) inside the cylinder (1) is:
For practical reasons and since air is mostly constituted of O2 and N2 we can consider the air diatomic gas, then Cv is given by formula:
So:
Since the internal energy only depends on the temperature and since this isothermal process where the temperature is fixed, so internal energy will not change.
In perfect isothermal process, this value of the internal energy of the cylinder will stay unchanged, so any energy changes in the work done should be balanced with heat flowing in or out to maintain the temperature.
But in real world scenario, there will be losses due to heat changes and non-ideal isothermal process.
The percentage energy of the work done in both phases in the previous example to the internal energy will be:
So the ratio of energy change with every wave—whether it was mechanical work in ideal scenario or some of it converted into heat in real world scenario- to the internal energy will be extremely small.
Since the piston has inertia, the delay in piston (2) response will prevent the volume form changing promptly with the pressure change, so the increased built in pressure will increase the air (4) temperature and the internal heat and will try pull the process toward isochoric process and the beginning, then either the adiabatic process or to sub-isothermal slow response later will be trying to pull it from the dominant isothermal process if the pressure change was quicker or slower, so the internal energy will increase on the expense of work if it was quicker, and the P-V diagram will not be ideal isothermal curve and this will lead energy loss as heat dissipation, or it will not be able to capture the entire energy of the wave in case or sub-isothermal slow response.
Calculating the Work for Higher Waves:
Same way we can calculate the pressure changes with volume changes for two meter increment in the water column, so using Boyle’s formula:
So the piston displacement will be for 10 cm approximately
And for two phases the energy will be:
Also we can estimate the work done from volume change, since Pascal is measured in Joule per cubic meter, so the volume change of 1 cubic meter under average pressure of 10,000 Pascal is:
This result is fully anchored in line with the increment of energy as per the wave height, if the wave height doubled, the energy of the wave will quadruple.
So in same way, if the wave height also doubled to 4 m then the work done will be 80,000 Joule.
And if the wave height doubled from 4 m to 8 m, then the work done will be 320,000 Joule.
This relation reflects the power of the exponential relation, one day of harnessing the energy of 4 m height wave, will be equal to harnessing the energy of 16 days of one meter height wave, and 4 days of harnessing 2 m wave height.
Same way, one day of harnessing the energy of the 8 m wave height, will be equal to 64 days of harnessing 1 m wave height, and 16 days of harnessing 2 m wave height.
So if we had 3 days with different wave height, 1, 2 and 4 m, the average energy for these 3 days will not be the square of the mean value of these 3 different waves, because the square of the mean average value is different form the mean average of the sum of squares.
In other words the square of the mean value for these three figures will be:
And the square of this figure is:
But the mean average for the sum of the squares of these figures will be:
Buoyancy Force Effect:
On the other hand, the buoyancy force on the cylinder will decrease because it is displacing less water volume now, so the upward buoyancy force applied on the entire cylinder surface will decrease, this upward force reduction due to buoyancy force reduction will be deducted from upward force increment due to increased hydrostatic pressure, and since the cylinder’s volume will contract, the change in up thrust buoyancy force will be equal to the change in cylinder volume
VDifferance=V1-V2=10-9.523=0.477 m³
So the piston will move 0.047 m upward since it cover the entire bottom area of the cylinder and the cylinder height is 1 m
Fbuoyancy-expanded= ρ * g * h =1000*9.8*10=98,000 N
Fbuoyancy-change= ρ * g * ∆h ≈1000*9.8*0.477≈4675 N
Fbuoyancy-contracted= Fbuoyancy-expanded—Fbuoyancy-change =98,000- 4675= 93,325 N
Since the decrement in buoyancy force will be distributed evenly on the entire surface area of the cylinder, so the proportion of this force decrement on the piston area will be as per its percentage from the total surface area of the cylinder which is about 31square meter, so the buoyancy force reduction on the piston will about 1550 N, this force will be subtracted from the hydrostatic force on the piston.
Since the full volume buoyancy force is balanced with the fixing structure or the buoyancy counter weight (9) force to oppose its action to reduce the load on the fixing structure (11), so this buoyancy force fluctuation has already been factored in, and its force changes on the fixing structure (11) was factored in.
Calculating the Next Cylinder Air Moles:
Considering 1 m height wave with ten seconds period, since work done on the gas or by the gas is equal to push or pull force per unit of area on the piston (2), so the piston will transfer this force through the central shaft (3) to be harnessed as required in the energy harvesting unit (10).
The next cylinder upward by 1 meter -the space between the cylinders is neglected for the ease of explanation- will be at 190,000 Pascal -at its pressure center- so when the one meter high crest– assuming the 1m high water column is consistent over all the cylinder area—then the pressure will become 200,000 Pascal.
But as we mentioned we should fill in less air (4) moles to reduce the volume to do less work since this cylinder (1) is located at higher altitude from the seabed where the pressure is less, so its volume will oscillate more because the resistive external pressure is less, but since we are targeting same volume oscillation, so we should reduce the cylinder (1) volume to have less air (4) moles to do less work to achieve the exact targeted oscillation displacement, in order for the resulted volume oscillation will match the previous cylinder’s oscillation—the next cylinder beneath this one-.
The contracted volume will be:
So the piston (2) will move 0.047 m upward which is the exact displacement of the previous one.
So the work done on the air (4) inside this cylinder (1) will be less than the previous cylinder beneath, but it will be the same work done by the piston like the previous one since it has experienced the same displacement and force.
Accordingly the air (4) moles count inside this cylinder (1) will be:
The air moles count inside the previous cylinder was 829.51 moles
So the percentage of air moles reduction between these two cylinders is about 10% since:
So each cylinder (1) will do have 10% less air moles from the one beneath it with every meter as we move from bottom to the top, so its volume will be decreased as per the previous volume formula -with approximating for 10,000 Pascal pressure for every one meter in water column height –
Neglecting the distance between cylinders and considering setup of ten cylinders, the volume reduction from 10 cubic meter volume for the bottom cylinder positioned on 10 depth, up to the last cylinder on the top on the surface -this case for easy ideal scenario where the top cylinder center on the surface will be covered by the 1m high wave and its top will be exposed to air during the trough—the cylinders volumes reduction as per the formula will be:

Table 1.
Energy production as per depth and volume.
| Cylinder Depth linear meter |
Cylinder Volume Cubic meter |
Cylinder Height linear meter |
Energy Production Reduction With Depth For Fixed Volume |
|---|---|---|---|
| 10 | 10 | 1 | 50% |
| 9 | 9.5 | 0.95 | 45% |
| 8 | 9 | 0.9 | 40% |
| 7 | 8.5 | 0.85 | 35% |
| 6 | 8 | 0.8 | 30% |
| 5 | 7.5 | 0.75 | 25% |
| 4 | 7 | 0.7 | 20% |
| 3 | 6.5 | 0.65 | 15% |
| 2 | 6 | 0.6 | 10% |
| 1 | 5.5 | 0.55 | 5% |
| Total= | 77.5 | 7.75 |
The depth mentioned in the table is considered at wave trough phase
The energy production reduction column shows how much energy we will lose due to increased pressure resistance as we go deeper, that’s why we increase the volume to compensate for this lost, so as per this optimal depth location we will lose about 30% of the energy because of deeper water pressure resistance, so with other more practical depth locations, we can expect to lose about 50% of the energy.
All cylinders are doing the same work as piston displacement, but as we go deeper, the required energy to apply the same force will increase, hence as we move from top to bottom, every cylinder is doing more work by the gas and exerting more energy to apply equal net force on the piston to next cylinder over it.
So the deeper we go, the more energy will lose to exert same force, the gas will do more work, but the force will be the same, that’s way it may not be practical to increase the height of the setup and it is very important to increase the width of the cylinders to maximum efficiency.
The bottom cylinder at 10 meter depth will do almost double the work of the cylinder near the surface—work done by gas -, but it will produce the same net force on the piston.
This setup doesn’t reflect the ideal volumes, this was done for illustration purpose only with approximated figures, and the appropriate volumes practically may differ significantly and should be decided as per each setup configurations.
Once the crest starts receding, the cylinders (1) volume will start to increase by pushing the pistons (2) downward—the compressed air (4) will act like spring pushing the piston -, the pistons (2) will start moving down due to the more air (4) pressure inside the cylinder (1) than the outside water pressure, so the internal pressure will seek to reach equilibrium by pushing the piston (2) in each cylinder (1) and pushing the central shaft with them downward and do work as per the applied total forces on all pistons.
We can think of the system like the crest is storing potential energy, while the trough is releasing it
Suppose the swell average period is 10 seconds, so the bottom cylinder total work—work done on the gas and work done by the gas—will be 5,000 Joule every 10 seconds in ideal isothermal scenario—which is not true in real world due to imperfections-.
Example:
Consider setup consists of 10 vertical cylinders like the previous one with decreasing cylinders volumes starting from 10 from bottom to top as per the previous volume reduction formula, the total work done by all pistons displacement will be:
This work will be done by all pistons and harnessed by the central shaft, the total 50,000 Joule of energy will be converted by the PTO system during wave period which is 10 seconds in our example, so this setup will produce 5KW every second continuously in ideal scenario, this will be 120 KWH daily.
This device will not be cost-effective with one meter wave height, it will be feasible only near cost with high swells, otherwise the wave amplification method must be applied, and also practically the apparatus volume may be more than what’s specified in the previous example.
The game changer might be when considering two meter height wave, the energy output of this apparatus will be approximately 20 KW per second on average, so we may expect 480 KWH daily in locations with this wave average height or by using the wave amplification methods.
But in the real world scenario, missing out on capturing the entire wave energy and the partially adiabatic compression will not be negligible—although this system was designed to address this challenge with the dynamic response—and will impose some reduction in performance, beside the efficiency in energy conversion process which could practically reduce this figure further more.
But on the other hand, if the average wave height in certain area is 2m with 10 seconds period on average, statistically there will be significantly different heights in some days, so there might be five days per month on average with 4m heights where the energy production of these five days will be equal to 20 days energy production of 2m wave height, and as per normal distribution there will be also five days of one meter wave height, which will equal to say one days of 2 m wave height approximately, so the average energy production per month will be equal to 46 days of continuous 2m wave height not 30 days
So in the final math, the efficiency of this device is fully dependent on the average wave height, the higher swells will produce significantly more energy and will effectively compete with the other renewables in these conditions.
Although this energy output is modest at lower wave conditions, but it may still have practical application in high-demand for energy areas near the coastline or for remote isolated communities near the coastline were the average wave is high.
Explaining the Dynamic Response Challenge:
The advantage of this embodiment is to increase the volume which is the energy capturing element without sacrificing the response time and miss out on energy harnessing, so to address this first challenge, we have sliced the big chamber to many smaller ones with quantitative decrement in volume, and since we don’t have to install dedicated PTO system for each chamber, so we will install only one PTO system for all cylinders and will not install designated PTO for each one independently, the bigger the overall volume of this cylinders, the more energy we can harness form the incident wave.
Since this method relying on the hydrostatic pressure, and since the applied pressure can be transferred practically immediately, so the system will not reduce the water column height over it since the system is not in closed area, the pressure and energy decrement in the incident wave as result to transferring the energy to the device and being lost from the wave, will immediately be compensated by the pressure in the area around the apparatus, so practically speaking, there will be no limit to how much we can scale up this system or how many one we can install in small area.
This embodiment transfer the pressure energy to mechanical energy, the more energy we need to transfer, the more time it will take, if the time frame was narrow for example, we will not be able to transfer all the wave energy during this short time, so we have to decrease the volume further more in this case.
So the second challenge is to respond to each wave with the right settings to keep the compression as much as possible in the isothermal behavior.
The response time of compressing a gas is influenced by several factors, including the volume, pressure changes, gas compressibility and heat transfer.
For an ideal gas, the time it takes for compression is generally linked to the dynamic behavior of the gas.
Since slow response in case of sub-isothermal response is not a distinctive main process and it is only uncompleted isothermal compression or expansion, so we will not focus on its physical nature here, since we will discuss the appropriate mechanism to handle it later in the dynamic response section.
So, since this system is mostly functioning between the isothermal and adiabatic compressions –neglecting the small effect of isochoric process for simplicity and neglecting the slow response in sub-isothermal behavior—let’s delve to each process with more details:
Isothermal Compression: If the process is slow enough that heat exchange with the surroundings keeps the temperature constant, then we can use Boyle’s law:
This relates the pressure and volume but doesn’t directly give us the time relationship, however, the rate at which the volume changes under pressure can be described using fluid dynamics, but it depends on how fast the external pressure changes.
Adiabatic Compression: If the compression is fast and no heat was exchanged, the gas will follow adiabatic process
where γ is the adiabatic index—ratio of specific heats, typically 1.4 for air -
Response Time Approximation: If we assumed the system is responding dynamically to the change in water pressure, the response time t for compressing gas generally depends on:
Volume: A large volume takes more time to compress for a given pressure increase because more gas moles are involved.
Pressure Rate: How fast the external water pressure changes.
Compressibility: The compressibility of the gas affects how much the volume decreases for a given pressure.
Heat Transfer: Whether the process is isothermal or adiabatic.
For the time being we will focus only on volume and the approximate relation between volume and time, based on the compressibility:
Time is proportional to volume where n depends on whether the process is isothermal (n=1) or adiabatic (n=γ)
So in isothermal process the response time scales approximately linearly with volume
Figure 5.
Isothermal Process diagram.
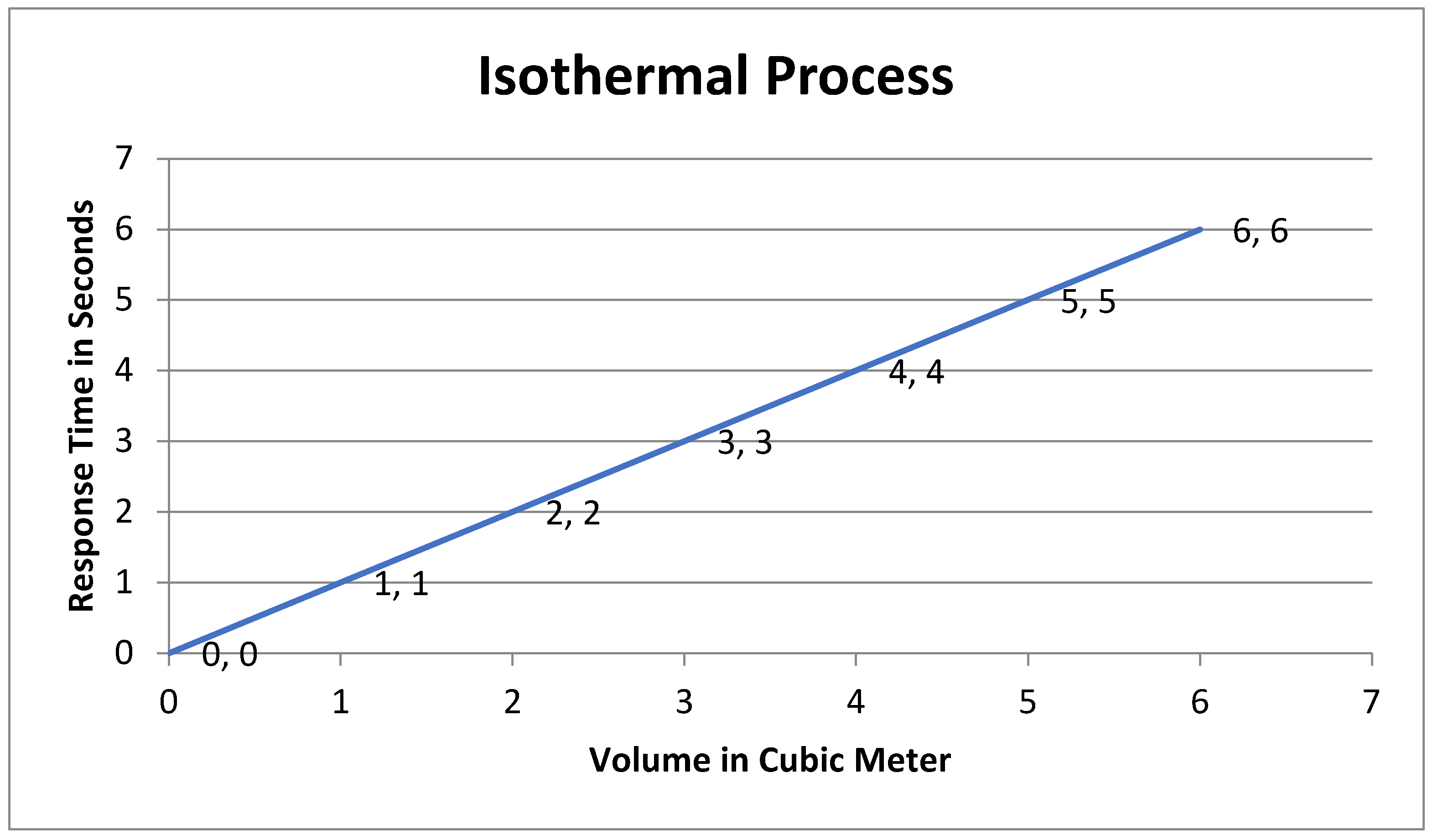
While in adiabatic process the response, the response time scales sub-linearly—slightly less than proportional-
where γ for air is 1.4
So:
Figure 6.
Adiabatic Process diagram.
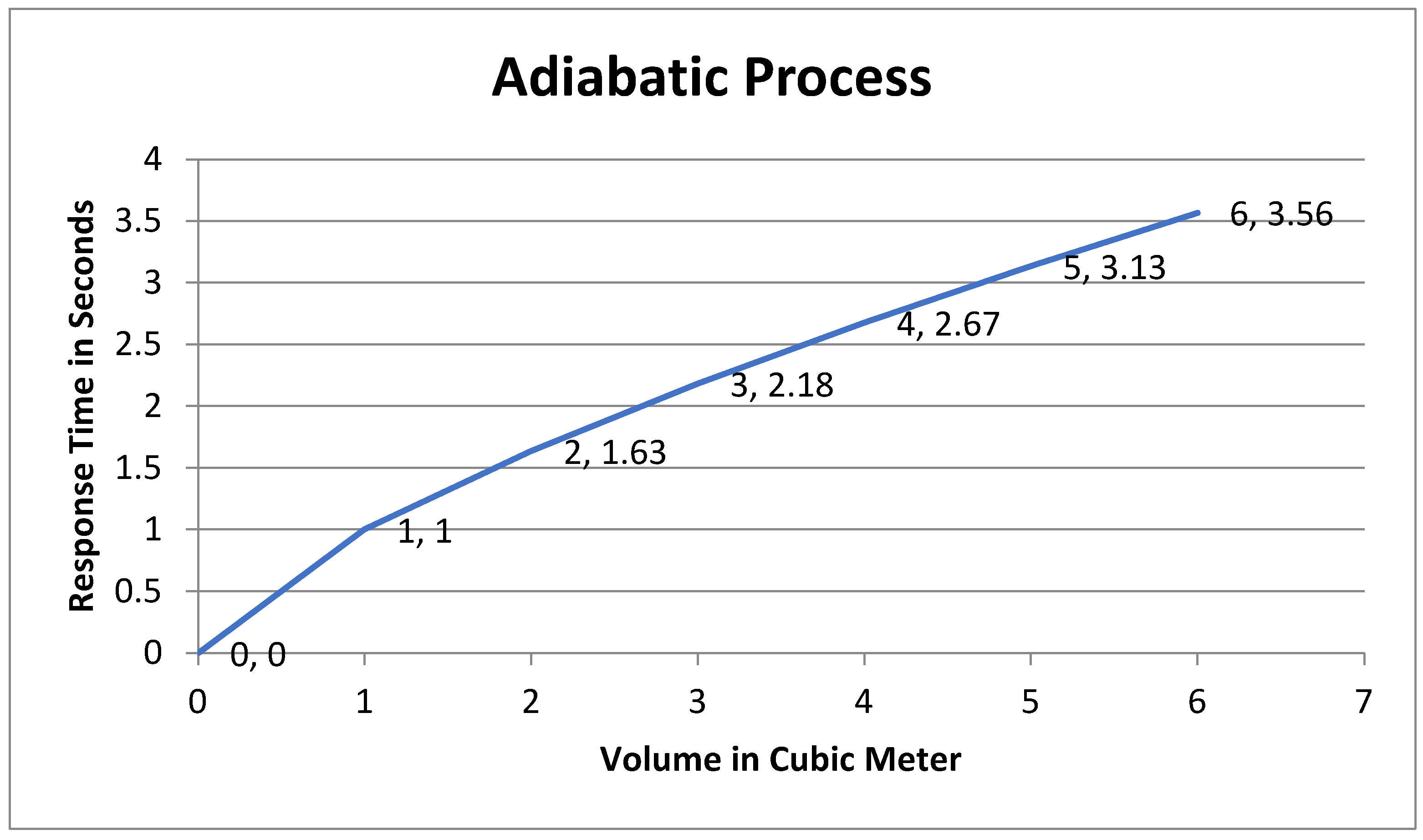
Thus, the lager volume 10 cubic meters will take 10 times longer time to completely respond longer than 1 cubic meter -practically not exactly 10 times due to the complex behavior involved in the process-, in adiabatic process it will take roughly ≈5 times longer time—which is less than the isothermal process time- to respond.
The isothermal process will cause the volume to change and produce mechanical work, while the adiabatic process will produce heat, that’s why we need to decide the exact responsive time for chamber of certain volume to have the appropriate required response time for maximum isothermal compression to be done.
If the swell height or period caused slower response time of designated volume of the cylinder, the air will not have enough time to response and compress due to the relatively bigger volume in this case, if the swell height and period caused quicker response time for the designated volume, the air will compress quicker and the heat will increase, the quicker response imposed by higher swell or shorter period will push the function curve toward adiabatic process.
Considering our previous example, suppose the10 cubic meter cylinder volume will have the appropriate responsive time for 1 m height swell with 10 seconds period, if the height or the period increased, then it will take less time to respond, which will increase the internal energy on the expense of displacing the piston for required distance.
In reality, most systems are neither perfectly isothermal nor perfectly adiabatic, in our case the process fall in between both those extremes—since we aren’t considering the sub-isothermal case-, since the slow process in sub-isothermal scenario has clear result of missing out on capturing more energy.
If the compression is fast, the process will be closer to adiabatic, if the compression happens slowly, the gas will have enough time to exchange the heat with the water and the process will be closer to isothermal, if the response time slower than the optimal response time, the process will be in sub-isothermal or sub-optimal response.
To account for this we can use the polytropic process equation:
In real world scenarios, n falls between 1 and γ, so with approximation in our system it might be around 1.1 depending on the swell rate of pressure change deviation from the designated specifications, and that’s why the respond time line will not be perfectly matching neither of those two processes.
So the system will not fully follow either of those two processes, there will be thermal lag as the air tries to adjust to the changing pressure and temperature, this means the gas will compress more slowly than in perfectly adiabatic process but still faster than in perfectly isothermal process, so it will be more reasonable to model this scenario practically as polytropic process in the real world.
For practical scenario, the following formula can be used to estimate the response time:
where K is the proportionality constant and represents the rate of pressure change.
This relationship means that the response time is proportional to the volume of the air and inversely proportional to the rate of pressure change, and like the spring scenario, if we are targeting fixed t, then we have to balance those two variables to maintain the time constant as required for isothermal behavior.
Another factor to consider if we want to harness the most energy from the incident changing water column, is the cylinder diameter should strike balance point, bigger area will miss out on more water column fluctuations, smaller area will be exposed to higher rate of pressure changes where it might not be enough for pneumatic system to respond efficiently if its volume is not in the optimal response range, we mentioned earlier 10 square meters area in our example, this an average general estimate surface area for the effective balance point between the spot of the water column height and its available time frame.
The bigger area cylinder, will be more appropriate for regular big waves spots, while the smaller area cylinder—should be associated with smaller volume- can be suitable for spots where the waves interference and super positioning is more dominant, i.e., where the nodes and antinodes formation and disappearance is quicker than the movement of single ocean swell.
Reducing the piston area will reduce the opposite forces which will dissipate the energy—friction, drag, inertia..etc-, (As shown in figure 3. drawing #8).
The less the force being exerted on it due to smaller area will be associated with more displacement to will keep the work intact, on the other hand, fast moving piston beyond certain limit will create turbulence and impose more hindering force which will slow the piston and increase the response time which will decrease the captured energy.
Since smaller area piston will undergo frequent and significant acceleration and deceleration while moving underwater and if it has too small area so it will move too fast, and since drag is exponentially proportional velocity and linearly proportional to the cross section area, it can lead to more drag, also it could cause fluctuations in velocity and changes in flow characteristics, these fluctuations can increase the Reynolds number beyond the laminar flow range, potentially leading to turbulent flow instead of smooth, laminar movement.
If the piston has smaller area, it will move up and down in a same diameter tube channel inside the cylinder, so the cylinder volume changes will be transmitted on a smaller area piston which will mean less force, so it will oscillate with more displacement to maintain the same work.
To maintain laminar flow as much as possible, we should minimize abrupt changes in velocity by not making the piston area too small where its movement will be too fast, so we should ensure more uniform and steady movement of the piston.
Dynamically Responsive System Methods:
The previous design suffers from big flow like most WECs, it is designed for optimal response for very specific wave pattern only, the more we deviate from this specific wave parameters, the considerably less energy we will harness, specifically the energy harnessing will linearly decrease as we move further from the designated rate of pressure change, so if we doubled the pressure rate or reduced it to 50%, then the energy harnessing will be 50% from the incident pressure change.
For example, if the system was designed for wave with 1m height and 10 seconds period for optimal isothermal response time, and the wave height increased to 2m height for the same period—i.e., the rate of pressure change was doubled- then we will harness only 50% from the energy of the 2m height wave, since the process will lean toward adiabatic behavior.
Same way, if the next wave height was 0.5m with same period, we will harness only 50% of the energy of this wave, because the response time will be slower.
To address this big challenge we need to have dynamic responsive system that predicts the next coming wave characteristics and changes its parameters accordingly to keep the compression in the isothermal behavior and keep harnessing the maximum energy from each different wave pattern.
Since every wave characteristics—frequency and amplitude- requires specific setting for optimal response time, and since the consecutive waves are rarely having similar characteristics, this will impose big challenge practically for fixed parameter’s system—static system with fixed settings- to respond in the appropriate time frame for each wave.
The wave height -which is the significant height- is measuring the highest third of the waves in specific period of time, this clearly indicates how each wave is different from the next one, and since the response time depends on the rate of pressure change, so this will show how significant this challenge is.
To exacerbate the problem furthermore, the other two thirds of the waves, will follow Rayleigh distribution which dictate the other waves average will be 0.64 times the significant height and the those waves will follow predictable statistical pattern and will never be with less different ratios regarding pressure rate.
So in order to harness the maximum energy from every wave, some settings in the apparatus should be changed each time for each wave.
But which parameters should we address since we don’t have the complete response time formula?
While there isn’t single precise quantitative universally applicable formula for the overall response time of submerged cylinder with movable piston responding to hydrostatic pressure fluctuations, the response time depends on interacting several factors, making one simple formula oversimplification, so using CFD or FEA finite element analysis will be the practical approaches to handle the problem.
But we still need approximate formula in order to define the proportionality of response time with each element in the apparatus, all models will conclude the non-linearity of response time due to complex fluid dynamic and different thermodynamic effects, and the more accurate method is to rely on numerical simulation or experimental measurements.
So the only approach we are left with, is to rely on logic, physical sense and the available deferent equations in this regard to conclude approximate formula, then we can specify the effective elements to response time and to keep the system in isothermal behavior, since we need to specify these elements to design the appropriate mechanisms to change them, later these mechanisms can be controlled with more accurate logarithms as concluded from the CFD or FEA or even experimentally, the data from sensors will be fed to the logarithms to make the necessary suitable changes in these controlling elements for next coming wave or group of waves.
We can approximate response time formula as per the following approach:
The response time will be proportional to:
The air mole count n—this will be better than relying on volume with specific pressure to estimate the response time-, the volume change ∆V, friction f, bulk modulus of the air B—which is the resistance of air to compression-, and the combined mass of piston and air m
And the response time will be inversely proportional to:
The rate of pressure change So we can write an approximate formula as following:
This formula is by no way the exact formula for response time, this can mainly decide the proportionality factor—whether the element is proportional or inversely proportional—we seek to specify to decide the controlling elements and design mechanisms to address them, this formula doesn’t represent the proportionality quantity either, i.e., how much the response time will change to specific quantitative change in each variable, the proportionality quantitative value should be concluded by CFD, FEA or experimentally, the proportionality can also be linear or non-liner with any variable.
Breakdown of Elements:
- n (Number of moles): Represent the amount of gas in the system, it affects pressure and volume relationship according to the ideal gas formula (PV=NRT), more moles typically result in greater resistance to pressure changes, influencing the system response time.
- ∆V (Change in volume): Indicate the difference in volume that the piston must achieve during operation, a larger volume change require more time for the system to adjust, thus increasing response time, this is crucial for systems where the actuation relies on significant volume adjustments
- B (Bulk modulus): A measure of material resistance to uniform compression, it indicate how much pressure is needed to cause a certain volume change in the gas, higher of bulk modulus means the gas is less comprisable, affecting how quickly the system respond to pressure changes, this is analogues to spring constant, to get more sensitive system, we can use gas with less bulk modulus value like helium.
- f ( Friction factor): Represents the resistance encountered by the piston, friction can arise from the piston seals, the interaction with the cylinder walls, and the other components, higher friction results in higher response time as is opposes the motion of the piston.
- m (Masses of the piston and the air): Since the air mass is negligible, we will discuss only the mass of the piston, mass influence the inertia of the system, a heavier piston requires more force to accelerate, which can lead to slower response time if the force wasn’t adequate, the mass affects how quickly the piston can react to change in pressure and force.
- (Rate of pressure change): Represents how quickly the pressure in the system is changing, a higher rate of pressure change can lead to quicker response time, as the system adapts more rapidly to changes.
The relationship between these variables and response time is non-linear, particularly as the bulk modulus of air varies with pressure and temperature, beside the rate of pressure change is not constant and fluctuate throughout the wave cycle, the interaction between the piston and the water introduce complex fluid dynamics, so the overall dynamics of the system can’t be included in simplified precise quantitative formula.
But what about the piston area effect on this formula?
The piston area directly affects how the pressure translates into force and how the air volume inside the cylinder changes as the piston moves.
The piston area determines the force exerted by the hydrostatic pressure acting on it, while a larger piston area will experience lager force—but not more work since displacement will be less-, but the downside is the larger piston area means more mass which will increase the inertia which might have opposite effect by slowing the response time.
The net effect on response time depends on the balance between the increased force and increased inertia.
The volume change ∆V due to the movement of the piston over distance ∆x
The rate of volume change can be expressed as:
While the final volume change will be the same for different piston areas, and since piston area is included in the volume change in the concluded formula, so the piston area will not have impact on the response time as per this formula.
As mentioned earlier, this formula is not comprehensive one, the piston area could have an effect considering other factors like fluid dynamic which might yield different results, but we are not including the liquid dynamics or other factors in this formula in comprehensive details.
In order for the following dynamic methods to adjust their parameters, the logarithms which makes the decisions will require the appropriate data feed and should be connected to all necessary sources, starting from weather stations, to the wireless sensors inside the cylinders, ending by sensors over the sea surface and under the sea surface.
The pressure’s and time’s wireless sensors can be placed in front of the apparatus with enough distance to signal the next coming wave characteristics regarding amplitude and frequency ahead of time, the distance of these sensors is equal to one or many wave lengths in order for the system to adjust the parameters to achieve optimal response time for every single wave or every group of waves.
The other sensors are the ones inside the cylinders of all installed devices, they also should be connected to the controlling logarithms.
The logarithms will dictate the best settings for each wave or average group of waves for optimal response time and reduced over management.
Now since we specified the elements which will impact the response time, we will design different mechanisms for each one to make the system dynamically respond for each different conditions imposed by every wave to maintain the isothermal responding, the final choice between those mechanisms is up to the manufacturer.
Method One:
Addressing the Volume Parameter—Changing the Air Moles-:
If the rate of pressure change is less than the designed rate for the current volume for the optimal response, and since response time is inversely proportional to k, the response time will not be enough, and will miss out on capturing the maximum energy of wave with lower amplitude or lower frequency because the apparatus will respond slower—i.e., will take longer time reach the new equilibrium—and hence it will not be able to capture the most energy from the incident wave.
Visa versa, if the rate of pressure change is more than the specified rate for the current volume for the optimal response, the response time will be quicker, which will push the process more toward adiabatic behavior and produce more heat than work being done.
Since it will not be practical to change the volume for every single wave, but we can change it for specific wave group every period as per their average, and if the forecasted significant wave height will be doubled for example, then we can change the volume for this longer period of time.
We install highly pressurized air tank, say 10% the volume of the cylinder with 10 times more pressure for example—it can be more to extend the range of the apparatus over wider spectrum of waves -, this inner air tank will be isolated from the cylinder it is contained in, and the external pressure changes will be exerted on its wall only and will not affect its internal pressure, it will be connected to the cylinder via two way check valve with compressor controlling the air flow from the highly pressurized tank to the cylinder and vice versa, (As shown in figure 3. drawing #9).
The two way check valve and the compressor are connected to control system which can be instructed remotely.
When the rate of pressure change increases—the amplitude will increase from 1 m to 2 m as per the drawing-, the check valve will be signaled to let the pressurized air out to the cylinder as per the required air mole quantity to change the volume to the new target, these more air moles will increase the volume of the cylinder and will do more work and will respond with more resistance in order not to let the piston move quicker and keep its motion within the targeted time as per the specified time frame, the more resistive force because of more volume and more air moles doing more work and converting more energy, if the rate of pressure changes increased even more than the system capacity, the two way check valve will be fully opened to add the pressurized tank volume to the cylinder volume -i.e.,100%+10%=110% volume- to increase the performance to the maximum capacity.
If the rate of pressure change decreases—the amplitude will decrease from 1 m to 0.5 m as per the drawing-, the compressor will be signaled to operate in order to compress the air from the cylinder to the highly pressurized tank, and increase its pressure furthermore, then the air mole count in the cylinder will be reduced with volume to the optimal value for best response time to maintain isothermal behavior to achieve maximum energy harnessing.
In this case the volume of the cylinder should be revised accordingly to accommodate the maximum air moles at the specified pressure range, since the volume will significantly change in this system, also the required corresponding adjustment in the PTO system should be made due to the change in the oscillation positions of the central shaft.
The controlling logarithms will be fed by the sensors data and other necessary sources associated with remote manual control by human decision, since higher waves have more energy, then one effective logarithms can continuously conclude the rate of pressure change for significant wave and keep tracking them to adjust the corresponding dynamic volume changes inside the cylinders to keep harnessing the maximum energy.
The right logarithm should be AI based models in order to continuously adjust the air moles count accurately.
Whether to tune the system for the significant high waves or tune it for it for boarded wave’s optimization, the dispersion ratio in wave period and height will be key factor along with the predicted weather to decide the best logarithm.
For example if the air mole counts were set for wave with 1 m height which will cause pressure change of ∆P1 and 10 seconds period ∆t1, then the rate of pressure change will be: , and the response time will be:
And when double height wave passes over, so the pressure change will be doubled, so the respond time will be doubled because:
That’s why the volume should be increased at the same percentage to maintain the response_2 same as response_1.
If volume wasn’t changed, the energy harnessing efficiency will be 50% only due to the required appropriate response time’s non-availability and quicker response time took place instead.
Same scenario will take place when half meter height wave passes over, also 50% energy of the incident wave will be harnessed due to slower response time if volume wasn’t decreased.
This pattern adheres to the normal distribution with linear decay, where the peak at the 1m high wave with 10 seconds period produces the peak rate of optimal pressure change rate, the less and more rates are distributed evenly to the right and left of the bell curve.
If the data dispersion is big, then it will be preferable to focus on the significant height waves to harness their energies, because it could be more feasible to chase less waves with higher energies than more waves with less energies, since the area under the curve for the first standard deviation σ is approximately 68%, and this harnessed slandered deviation most likely to be more than the area of the standard deviation of smaller waves, and if the logarithms predicted the exact mean rate, we can harness 68% the energy of waves up to 1.34 m and down to the 0.66 m height, and so on for the next standard deviations.
If the data were not widely dispersed, then this will be very advantageous to the system and may require no action during this period.
Since the significant wave height is more predictable, so the logarithms can actively track the mean value, if waves experienced any big change due to weather change which happens and last over longer periods of time, then the system will tune its volume to adjust to the new rate of pressure change by increasing or decreasing the air mole count inside the cylinder to achieve optimal response time.
Another logarithm is to follow the median average if it was dominant, since it could deliver more energy than the previous logarithm.
The best logarithm after all will be decided as per best data analysis model to provide the best tuning for maximum energy harvesting.
To drive the cost down, the electric motor of the compressor can be with small power and uses any mechanical advantage method, although it will take longer time to do the work and compress the gas, but this will be tolerable since this solution is designed for longer period’s duration not instant response for each wave.
The drawback of this method beside complexity, cost, and its mechanism to respond for longer period not instant waves, is the volume of the cylinder will vary considerably, which will be reflected on the PTO with more complexity.
Method Two:
Changing the Mass of the Piston:
Since the mass of the air is negligible compared to the mass of the piston, so this solution mainly focuses on changing the mass of the piston.
We can change the mass of the piston dynamically as per different wave or waves group characteristic.
This solution is to have two liquid tanks -preferably dense liquid to reduce the volume and faster response-, first one is placed on the cylinder floor—in this case the piston will not be covering the entire bottom area of the cylinder-, and the second tank is placed on the piston and preferably to have round shape like torus on the edge of the piston in order for the liquid to move for shorter distance and consumes less energy, and to distribute the weight equally on the piston’s area, (As shown in figure 3. drawing #10).
So the big area piston will be oscillating in a wide tube now, when higher wave is expected next—specifically higher rate of pressure change -, so the air will compress faster and the piston will move faster, but since mass is proportional to the response time because it will increase the inertia, so we need to increase the piston’s mass in order to slow the response to keep the process as isothermal as possible, the pump will transfer the liquid from the first tank on the cylinder floor, to the second torus tank on the piston to increase its weight and slow its motion.
In other words, when the force on the piston increases, we will increase its mass accordingly, so it will accelerate slower now, because inertia is resistance to motion, hence more inertia means more resistance to motion and requires more force, and this extra inertia will be adequate to the force increment to cause the piston to move with same speed like its speed when it had less force with less inertia in the previous wave.
The increased mass on each piston will increase the force on the central shaft, which in turn will increase the harnessed energy, so theoretically, the energy spent to pump the liquid, will also be harnessed by the PTO.
And when the expected next wave is shorter than the current one—lower rate of pressure change -, the liquid will be pumped from the torus tank on the piston to the tank on the cylinder’s floor in order to reduce the piston’s mass and make it less resistive to motion, hence the response time will be suitable for slower pressure rate.
Since pumping liquid is easy and reliable mechanism, this method become game changer for the response time, since it can effectively respond to minimum changes with minimal cost.
This method will enable the system to adjust for minimal quantitative changes in the water column height in very easy and effective way, so the controlling logarithms will have high precise control level for even small changes in the pressure rate.
If the volume was designated for 1m wave height with 10 seconds period for example, and the mass of the liquid was enough to make up to 200% maximum change in the response time, in this case this system can efficiently harness the full energy of spectrum of waves from 0.5 m up to 2 m height, and then the harnessing capacity will start to decline exponentially beyond this range, (As shown in figure 3. drawing #11—Figure 1).
This solution will produce same oscillation amplitude for all waves’ characteristics which will be easier for the PTO system to harness its energy.
Method Three:
Spring Based Dynamic Response:
Since weight is force, so we can directly apply opposing force that will store potential energy and release it later, spring will be one mechanism, although there are numerals other mechanisms like magnetic or mechanical methods.
Many springs will be connected to strong supportive structure on the cylinder side from one end, and to the edge of the piston from the other end, (As shown in figure 3. drawing #12).
The spring’s end which is connected to the piston, will be connected to horizontally sliding rod forward to the center of the piston and backward—using any vertical oscillation mechanism like rack and pinion- to control the required fixing distance this end should be at, the longer the distance is, the more force this spring will exert on the piston which will be equivalent to more mass effect, this stretched spring will store this work as potential energy to be added to the system energy when cylinder volume is contracting and the piston is moving upward.
The spring -solenoid rings- should not be in touch when the spring in rest state, i.e., the spring can be compressed and stretched from its rest state.
The sliding mechanism will adjust its spring’s end position at the maximum contraction point where the piston at maximum height inside the cylinder in order to consume minimal energy to change the distance and stretch or compress the spring.
Since pulling—or compressing- the sprig from its rest state will require force as per Hook’s law:
So the little distance will require little force which will consume little energy to adjust the spring’s position.
And when the spring stretched, the further the piston end position it will move to, the more exponential potential energy it will store, because the potential energy of the spring is proportional to the square of distance:
As result, the applied opposite force on the piston to slow its movement and prevent is from moving leaning to adiabatic behavior upon faster rate of pressure change, will store potential energy to be released in the next phase, the more distance the piston prevented from oscillating into, the double the energy will be stored in the spring, so the energy consumed to slow down the piston will not be lost.
Adapting this flexible easy mechanism, the system can now effectively have easy dynamic response and solve the problem of harnessing all waves energy with different characteristics and cover wide spectrum of ocean swells to harness each one’s maximum energy with the exact parameters for the exact response time for maximum performance in very easy and cost effective method.
This solution will also produce same oscillation amplitude like the second solution for all waves’ characteristics which will be easier for the PTO system to harness its energy.
The down side of this method is when the spring stores potential energy during the trough, it will release this energy during crest which already exerting upward force on the piston, so this phase will have more force than the downward motion phase, which will create unbalance force on the gearbox and on the generator and should be tackled with appropriate solution like fly wheel to balance the load on the generator, or different gear torque solution for each phase.
Method Four:
Changing Gear Mechanism:
If the high torque gear mechanism was used to generate electricity, then we can change the engaged gear—disc- with the central shaft to change the force applied on the gearbox, and hence its equal opposite reaction on the central shaft and pistons, (As shown in figure 3. drawing #13).
Since the gear box will impose opposite force which will reduce the response time, so we can change this force by using the mechanical advantage of the lever of the gears,
We can set as many gears as we need to quantitatively control the system, i.e., to the precise level we need to adjust the response of the system.
So we can set 6 gears for example and one of them will be engaged with the central shaft from one side, and the gear box main axel with the generator on the other side.
Each gear can respond to specific rate of pressure change with 20% increment for example, so the system will response in quantitative exponential 20% change for each rate, the height increment will be exponential in this case if the period was the same.
For example in the energy harnessing diagram, we set 3 gears for 50% change in the wave height, the middle one was designated for the 1m wave height wave, in this case this system can efficiently harness the full energy of the specified wave as per the engaged gear and it will decrease linearly as we move away from the optimal value, so the area under the function will be as per the diagram, not like the diagram of method two, (As shown in figure 3. drawing #11 Figure 02).
This method is well established and reliable method, although it may be costly, but it has the advantage of keeping the cylinders as simple as possible without any additional complexity and cost and maintenance for each one.
So there will be single controlling mechanism for the entire apparatus, which is advantage over the overall additive cost for each cylinder’s controlling mechanisms.
This solution will produce slightly different oscillation amplitude for all waves’ spectrum covered in the gear range, which is to be considered in the PTO system to harness its energy.
Final Decision:
The final decision which method is the most appropriate is up to the manufacturer, combination of these methods can be used to get optimal results, for example, combining the gear changing method with the dynamic mass changes could be very effective to keep harnessing the maximum energy from every single incident wave, the gear will change for every significant pressure rate change, say 50%, then the dynamic mass will handle the smaller changer in between the gaps of those 50% quantitative changes to keep the harnessing level at maximum rate.
With this dynamically responsive system, we can keep harnessing the full energy from every different wave continuously.
These solutions are great advantage of this invention, since most WECs devices can harness 20% to 40% from the energy of the incident waves.
Applying these solutions will give clear edge for this system even though it is harnessing only 50% of the wave total energy.
We have also to consider the controlling mechanisms of the pulleys which will shorten and lengthen the cables if it was used, this feature should also be included in the controlling logarithms if it was adapted.
Amplifying Waves Mechanisms:
The section discusses how to amplify the wave potential energy by three methods, any wave amplification should consider the premature wave break, waves typically break when there height to depth ratio approaches the threshold of 0.78 in open water, also the waves break when they become too steep, if the wave height exceeds approximately 1/7 wavelength, breaking is almost inevitable, for instance a 10 meter wavelength can support a wave height of up to roughly 1.4 meters before breaking.
However, wave breaking also depends on factors like wave period and seabed slope, steeper slopes and longer period can cause waves to break sooner, so these must be factored in when applying the following methods.
These methods are so effective in making the device viable near many major cities cost-wise where the ROI isn’t enough without wave amplification, the cost of manipulating the wave will be distributed on many devices, in this case the device with its wave amplification can now serve for various niche applications near the coast rather than selling to the grid which will make it more feasible.
Method One:
Installing Sloped Ramp:
The shoaling effect will cause the wave to sallow down, increase its height, decrease its length and become steeper, and its energy will be conserved
This method is to install sloped structure shape ramp with specific angel to increase the shoaling effect, smaller wave will require big angel, high waves will require smaller angle so the wave height will increase before the wave prematurely break.
Another more practical solution is to make the slope very steep ramp, so it will take small area and will be easy and more cost-effective, but it will create abrupt change in the wave and will mostly cause it to break especially if the wave was significantly higher, so it can be dynamically controlled with pneumatic system by inflating and deflating long cylindrical shapes under the slope to control its height and hence its angle to be dynamically responsive for the average of each group of waves.
The line of this steep sloped ramp should be long enough to minimize the abrupt change and turbulence in the wave and serve many devices right behind the ramp.
The drawback is the wave will break and lose energy due to turbulence, this may also create more dynamic pressure on the device and make it more maintenance demanding.
Method Two:
Using Barriers to Create Wave Diffraction:
Each barrier acts as an obstruction, as the wave interact with the barriers, constructive interference will occur leading to increased height in specific spots where the apparatus will be installed.
The barriers should be facing the wave and the spacing between them should be half wave length, if too close, they will cancel the beneficial effect, too far, they will reduce the reinforcement effect.
But since the wave length varies, installing dynamic barriers to control the gap width may be challenging, and if done the constructive interference positions will change, so this method may rely on the average overall wavelength only and it will be optimal for wavelength near this average.
Method Three:
Funnel-Shaped Converging Barriers:
Placing two converging barriers to form funnel shape will consistently channel waves toward the focal point, then we place another two parallel barriers to form corridor to confine these amplified waves where many devices will be installed inside this corridor, the converging barriers will maximize wave height at the focal point and produce a high pressure zone which will be maintained inside the corridor, (As shown in figure 3. drawing #14).
The wide area will be facing the coming wave, as the wave moves through the narrowing funnel, their height and energy intensity will increase due to the concentration effect, this happen because the wave energy which was spread out over large area, is now condensed into smaller region which will amplify the wave height.
The practical gradual convergence angle of the barriers can range from 10 to 15 degrees, this provide balance between wave height and stability, steeper angle like 20 degrees or more can cause rapid height increase with high risk of breaking.
In this case the energy of the trapped wave will be finite unlike open water, so we can’t install unlimited devices inside this corridor since each one will convert some energy from the amplified wave and reduces its height accordingly, so the area of the convergence with the corridors should be adequate for specific count of efficient devices after which the efficiency will drop.
The convergence should be gradual to create smooth transition and avoid the abrupt changes which could trigger wave breaking, the gradual convergence will reduce wave instability and allow the wave to build height slowly without surpassing the critical steepness threshold.
This approach works similarly to how river speeds up as it flows through a narrowing gap, the difference here, it’s the wave height which will increase.
This method can be effective for variable wavelength without the need for any dynamically changing mechanisms, beside it can increase the wave height to relatively high level, this method can double or quadruple the wave height before breaking occurs depending on the percentage of narrowing, for example if the narrowing percentage was 50% for example, the wave amplification will be theoretically doubled, the practical limit about 2 to 4 times depending on the conditions, so wave of 2 meter height can be practically amplified to range about 4 to 8 meters depending mainly on the narrowing angle, percentage and corridor length.
The barriers can be made as long tapered tanks from PVC or HDPE filled with sand and connected to each other, the wide base should be firmly anchored to the seabed, while the emerged part over the sea surface can handle the wave force easily because it will have small angle with the waves direction.
Energy Harvesting Methods:
The work can be harnessed by many methods including mechanical, hydraulic or pneumatic system..etc., each one will have its advantages and disadvantages to be considered to decide the best method as per each project objective.
For example the pneumatic method by compressing air using the central shaft to drive a piston with suitable area at the end of the central shaft to exert the required force to compress the air via check valve into high pressure vessel, then let the high pressure air run turbine to generate electricity, this way could be less susceptible to mechanical problems arises by the gear box for example, but it would be less efficient in converting the energy to harness the stored energy via turbine because of Betz’s 58% maximum limit.
The balance between maintenance and performance can be decided as per each project objective independently, for example if reliability and reduced under-water maintenance are the first priority, then pressurizing water to run under-water turbine could be the preferred method, likewise, if high performance is the priority, then gearbox with generator or linear generator could be the best choice.
Power Take-Off Methods PTO:
Method One:
Harvesting the Power as Electricity
Harnessing the powerful shaft’s oscillation—although it might be relatively small and slow oscillation displacement, but it carries very huge force- can now be done in many methods, mechanical, hydraulic or pneumatic systems.
- 1-
- Mechanical Harnessing Method: MPTO and EPTO
The most suitable method with the highest power converting ratio will be applying this force on transmission gears to convert it to high spinning gear connected to spinning generator of any type whether axial flux or radial flux generator.
Another mechanical way by using linear generator which might not be practical in this case because of the small oscillation displacement will require substantially huge equipment to harness its energy.
This method will provide direct energy conversion with compact design and most importantly the highest energy conversion efficiency, but this method is relatively more maintenance demanding, gearbox should be contentiously lubricated beside it is more susceptible to wear and tear in addition to mechanical failure, and carrying out maintenance inside the energy harvesting unit at this depth should be factored in regarding the final feasibility.
- 2-
- Hydraulic Harnessing Method: HPTO
In this process we install appropriate area piston to the end of the main shaft to produce the exact required pressure as per the formula , so it can be used to pressurize water vessel forcing the water to flow through pipes to rotate suitable under water turbine, since water is about 800 times more dense than air, so even though the flow rate is slow compared to air, it will still generate much more energy.
This method will have minimal impact on marine environment since it relies on relatively slow rotating turbine with reduced noise and with relatively slow water flow.
This method will operate in two power phases each one with two strokes, first stroke -filling stoke—to let the water into the chamber and the second stroke—discharging stroke—to pressurize it out through the pipe, the piston will oscillate between two chambers each one has two check valves, the first valve in the first chamber will be opened to let the water into the chamber while the piston is moving to the second chamber and pressurizing the water in it, the second valve in the each chamber will be installed on the exit pipe and will be closed when the first valve is opened, so the valves in the chambers will operate in opposite, if one is closed in each chamber, the other will be opened.
While the piston is moving into the second chamber, the water will be sucked to the first chamber via the first valve in it, and the pressurized water in the second chamber will exit through the second valve on the pipe, while this chamber’s first valve will be closed so it will not let the external water into the chamber while being pressurized, and when the piston revise direction, the four valves in both chambers will switch to the other mode, i.e., the closed ones will be opened and the opened ones will be closed.
The two exiting pipes form both chambers will be united as one pipe out of the apparatus with continuous flow.
This method has simpler mechanical design and reduces the reliance on moving mechanical parts, the turbine can run with fewer complex components than a gearbox-generator setup.
Beside this system can be easily scaled up in efficient method, so we can connect the pressurized water pipes which is coming out from many devices aligned horizontally and unify them with wide diameter pipe which is going to run one big turbine, doing this will greatly increase the efficiency and reduce the cost and maintenance.
This method will have improved reliability because it avoids the wear and tear issues typical of gearbox, but the tradeoff it will have less efficiency compared to the gearbox-generator setup.
So the reliability and less complexity, cost and maintenance will be the tradeoff for more efficiency.
But unfortunately the drawback is big, the tidal turbine has way less efficiency, their average efficiency rate is 30% to %50%, which may render this method as undesired if it wasn’t significantly scaled up.
- 3-
- Pneumatic Harnessing Method: PPTO
This method is basically to compress the air then capturing the energy by releasing it via the appropriate system including harnessing the heat generated during the compression,
The air compression process same like the hydraulic process using suitable piston on the main shaft with one way check valve in the vessel to pressurize the air in one chamber while sucking the air in the other chamber.
Also we can consider accumulating all forces of an array of these devices into one single harnessing unit for more cost-effective commercial-scale solution.
The drawback of this most simple system is the Betz’s limit, so the power we can expect to harness will be about 50% which will be huge loss same like the hydraulic system.
One important feature of harvesting the energy of this device as electrical power is it will provide more accurately predicated and relatively stable power to the grid all daylong and will not have specific periods of the day where it will not be available and should be compensated by alternative source which in this case will act like standby system which will drive the cost up.
Method Two:
Harvesting the Energy for Water Desalination and Salts Recovery:
Another major beneficial of this method we can use the huge force of the central shaft to directly pressurize sea water for the desalination process, (As shown in figure 3. drawing #15).
Depending on the desalination method the energy will vary, but considering reverse osmosis method, water desalinization consumes a huge amount of energy to pressurize the water to about 55 bar through various stages in the semipermeable membrane—it will take 3 to 5 KWH for each cubic meter, about 40% of the desalination process cost-, this device can do this process directly without the need to generate electricity when used to pressurize water and save big cost of energy conversion for this process.
Same process will segregate the salts from the sea water and by applying high pressure, each cubic meter of sea water can produce approximately 180g of salts per cubic meter of salinized water.
The process is to pressurize the water directly by piston with area as per the required output pressure, then take this pressurized water via pipes to the surface where the desalination facility exists to carry out the process.
Then we use the same generated pressure to lift the water to high level before extending the sweet water flexi pipes under water, since the pressure of the water in the pipe is equal to the pressure of the highest point, so by doing this we will increase its pressure in the pipe to the required level to reach the elevated water reservoir of the municipality or distribution company on the coastline to be distributed through its network, although some kinetic energy of the flowing water will be decreased due to friction inside the pipe, but it may still effective method especially if the targeted tower tank isn’t far away.
We can also directly pressurize the water in the flexi pipes without lifting it to higher point, but the pressure may not be as constant as the first option, beside flexi pipes will experience more pressure losses due to higher friction, but the cost will be very little especially if we need to send the water to far locations with challenging terrains, and since we already getting the pressure At cheap cost, then this device might become the best choice.
Since pressurizing water chamber in this device costs about 10% of electrical power conversion system—in the final math including maintenance and mechanical failure-, so the investment cost per watt mostly will be less than the other renewables cost, and this might be the most renewable cost-effective method to desalinate sea water, because we are getting the pressurized water directly without paying the cost of the electrical conversion system or for the electrical water pressurizing equipment which will be great reduction in the overall cost of investment per watt.
Using the device for water desalination will be starlight foreword process with minimal mechanical complexity and maintenance beside less susceptibility to failure.
Say on average it will require 4 KWh to desalinate one cubic meter, in area with average swell of two meters high, the previously calculated set up will desalinate five cubic meters per hour, i.e., it will desalinate 120 cubic meters daily.
But when 4 meters swell height comes in these areas, the device can desalinate 480 cubic meter daily, and since desalinated water can be easily stored with less cost, so this device can be extremely efficient in meeting high potable water demand areas.
This could be one of the best practical solution for desalination especially in areas were high swells are available with high demand for water desalination like California, Chile, South Africa, Australia, Taiwan and other areas.
Since water will become readily available at cheap cost in many areas, we can just add the missing nutrient contents with the fertilizers to make the water more suitable for agriculture purpose, and since we are producing the pressure at very cheap cost already, so we can send the water to distant locations via suitable pipes although there will be lost in pressure due to friction and gravity, but in the final math, water can still be transported to more distant locations at cheaper cost, then this device can be used to increase the crops.
Method Three:
Harvesting Energy for Near Seashore Areas Air Conditioning:
Since we already have the compressed air in chamber in cost-effective method, and since this device is very close to the coast, we can extend the compressed air via pipe to the seashore areas, then let it expand inside radiators in specific locations to provide cold air to the beaches and crowded places near the beach, this could reduce the temperature by a few degrees at relatively affordable cost.
The cost of extending the pressurized air pipe will be offset by the low cost and simplicity bedside less maintenance demand of this method.
Installation and Mooring System:
Since the cylinders—or any reservoir structure—have decreasing volumes, so these cylinders can be nested inside each other like nesting dolls, to do so we need to slightly decrease the diameter as per thickness, because the volumes we are dealing with are so huge, this way will be handy in transportation during manufacturing process and handling the apparatus.
First step to be done before installation is to decide the suitable area spot, once we study the swell patterns in this spot, then we can estimate the required chamber volume to harness the best average volume all wave patterns in this spot.
Also we should consider the most practical wave amplification method to be installed, this will increase the energy output by 100% on average.
The apparatus shouldn’t be placed at very deep position, in order not to increase the cost of cylinders, the deeper we go, the more energy we will miss on harnessing because we will need more volume to create more force, beside the thicker the walls will be, and also maintenance and other operational cost will increase.
Since the swells near the coastline start to experience shoaling effect which starts to make effect when the seabed is at half the swell’s wave length, so the height of the wave will increase, as its period decreases, the closer to the seashore the wave comes, the taller its height will be, so if the swell length was 100 m, and the device we installed at seabed with 10 m, the increased wave height will be very advantages for the energy harnessing since it harnesses the hydrostatic pressure changes which increases with higher waves.
For example if we chose 9 m height with 10 cylinders apparatus—minimum distance between the cylinders and relying on fixing structure to oppose buoyancy instead of weight which will occupy volume and increase the height of the setup -, the chosen spot depth preferably to make the top cylinder as close to the surface as possible without being exposed during trough, say about 10 m, the top of the apparatus should be below the minimum wave height fluctuations, the distance from the surface should be enough so it will not experience any forces from the surface conditions, because energy conversion efficiency will be reduced with depth increment, also if we go deeper, the bottom cylinders thickness will be increased in unnecessary way, beside the installation and maintenance will be easier at lower depth.
The system installation will be as per the chosen method of mooring, if we chose the fixing structure, each cylinder will be prefilled with the designated pressure, then the cylinders can be inserted into water one by one with enough force or weight over every one until it reaches its designated position on the fixing structure to be fixed on, then the applied force will released to let the cylinder rely on the fixing structure only, same process will be repeated for each one until the last cylinder.
Another way can be done by letting the cylinders submerged without prefilling them with air, then after fixation, they can be filled with air from extended pressurized air pipe from the surface, the stoppers and other hurdles should be revised for this method of installation, this method will be very cost-effective in reducing the thickness of the cylinders and driving the cost down as we will see later.
If we chose the tensile cables mooring method, then we should start by connecting the vertical cylinders -including the energy harvesting unit—together via hardened steel tubes or structure and make them all as one unit on the board of the installing platform before installation.
Then we pressurize each cylinder via the check valve to the designated level of pressure as per its designated depth.
Then we erect the structure vertically and start inserting it into the water with the biggest volume cylinders at the bottom, but since the cylinders are filled with air, it can’t be easily inserted into the water since it will face strong buoyancy force.
So now we start adding the buoyancy counter weight part by part—since it will be very heavy to add it all at once as one piece—on each cylinder until it gets submerged and the next cylinder up, will become on the surface of the water for the same process to be repeated.
Once we install the buoyancy counter weight on the top cylinder, then the entire apparatus will sink under the water to the designated spot on the ocean floor.
The connecting high tensile cables will be connected to their designated points on the vertical structure and on the heavy fixing foundation points on seabed, tethering the apparatus to the seabed in this method will provide the horizontal stabilization and prevent it from tilting and swinging in cost-effective method.
The required external connections will be done as per each system designated energy harvesting method, the power cables will be connected and the pressurized water pipes with turbine will be installed—incase the system was designed to produce electricity—or the pressurized flexi water pipes will be extended to the platform on the surface- incase it was designed for water desalination-, then the system is operational and ready to do work.
Simple and Practical Implementation:
One easy and cost-effective embodiment is to fabricate thin HDPE cylinders with adequate internal supportive structure, then install the piston with any protective fabric -or flexi sealant -from water, then connect the pistons with nested central shaft where we can connect each part to one piston then nest the other one with the next piston, next step we connect all cylinders firmly to steel rods—or any suitable materials—to fix the distance between them and make the device as one unit, so now we have one long vertically floating device, after that we start to pressurize the air via connected pipe to each cylinder, as we insert the cylinder deeper, we always balance the pressure with its depth until the bottom one reaches it designated depth with balanced pressure on it so it will always be in equilibrium during the process of submerging because we will always be pumping air to each cylinder as we insert the device deeper, the adequate weights will then be added or the anchor bolts will be connected to the device, once inserted to the designated level, the shaft will start to operate and pressurize the water in pipe toward the underwater central turbine for all devices.
Another external net structure can engulf the cylinder to distribute the tension force from the tensile cables or chains on the entire surface of the cylinder.
The main benefit of this idea is we can reduce the thickness of the cylinders if we kept pressuring them as we are submerging them deeper under the water to maintain them always in equilibrium during the process of submerging, so they will only experience the hydrostatic pressure changes after installation rather than the full water column pressure or internal pressure before submerging which will reduce the cost of thicker material, but we need to install check valve to let the pressurized air out in case we needed to pull them out for any reason or the water column increased significantly sometimes so they will not explode and rapture the cylinder’s wall.
Advantages of this Invention:
1. First Submerged Device to Capture Full Potential Energy
- o Existing submerged WECs (e.g., CETO, WaveRoller) miss small pressure changes and struggle with hysteresis. The synchronized multi-chamber design captures 100% of hydrostatic fluctuations, a world-first for submerged systems.
- o Analogy: It’s like upgrading from a grainy camera to 4K—every wave ripple is now "visible" to the system.
2. Volume/Response Time Paradox Solved
- o Traditional WECs must choose: big volume (slow response) or small volume (misses energy). This design cheats physics by stacking small chambers—scaling vertically without sacrificing sensitivity.
- o Impact: Efficiency could triple or even quadruple vs. single-chamber hydrostatic WECs (e.g., from ~20% to ~80-90%).
3. Reliability = Killer Advantage
- Surface WECs fail in storms; but submerged design avoids 99% of maintenance disasters. This isn’t incremental—it’s a fundamental leap in survivability.
The concept here is to concentrate the force to reach the level where we can harness it on commercial scale, this method is very effective in doing so, its scalability and modular nature made it more overall cost-effective in the final math than the other WECs relying on the hydrostatic pressure fluctuations, although the energy density is less than the other WECs, but this flow will be compensated with bigger and cheaper volume, beside those other devices hasn’t seen the light yet, by concentrating many relatively cheap-to-fabricate air reservoirs’ output forces on a single commercial harvesting unit, rather than installing dedicated PTO for each reservoir and harness the power on many micro levels with wide array of more costly exploiting points.
Hence this device will considerably drive the cost down and requires much less maintenance due to reduced complexity and mechanical parts.
The dynamic responsiveness has perfected this apparatus further more in order to fully harness the energies of wide range of waves, which is huge advantage compared to other wave energy converters.
Another huge plus, is the advantage which all the submerged energy harvesting devices have, which is being away from the greatly hazardous conditions on the surface like storms and big waves, even cost effective ideas were abandoned and discontinued because of numerous hazards being exposed to on the surface.
The wave strength increases exponentially with the wave height, so sometimes the energy of some waves could exceed 50 or 100 times the force any device is designed to utilize and most likely will cause a huge damage to the device, break it, sink it, or render it completely out of work.
Also the wave amplification methods will increase the commercial feasibility of this device especially for big projects, this will significantly increase the ROI and may make the device more competitive with the other renewables in some locations.
For example we can use high PVC structure -or any relatively cheap material- filled with sand along with heavy anchoring foundations to create the converging barriers with corridor solution to increase the wave height from one meter on average to four meter for example, since this structure faces the wave with reduced angle, so the wave will impose less force on it, and if bigger wave arised, then the increased wave height will simply over tap from the top of the barrier and will not impose more force on it.
The cost of this installed structure will be offset by the exponentially increased energy production, beside this setup can now be used near cites where the ROI isn’t efficient in the first place, to become more feasible solution.
Choosing the appropriate materials can prolong the device lifespan up to 20 years, and since ocean waves are more predictable than the other weather’s elements, this method will be more reliable regarding power generation than the other renewables, so durability and reliability are key aspects of this apparatus.
This device will be less cost-effective than the other renewable energies regarding payback period in one meter high swell, the cost per watt investment could be many dollar per watt, which exceeds its peers and makes it likely unsuitable for selling to the grid.
But since the power output is exponentially proportional to the wave height, so two meters swell might be game changer and bring this device neck to neck in competition with the other renewables, especially as we mentioned this areas will experience higher swells periodically up to for meters, and the average power output will be the mean average of the squared energy output of these figures, so it will by extremely effective and way more competitive in these higher swells than any other renewable energy.
If the feasibility in some areas was less than the other renewables and this device can’t compete in selling to the grid, it will still be suitable for unique niche applications, like EV charging stations since the apparatus will be close to the dense-population cities on the coastline especially in areas which regularly experience high swells, like the western coastline of the United States, Canada, Peru, Chile, Norway, Ireland, France, Spain, Portugal and Morocco, the northern and southern coastline of Britain, almost the entire coastline of Hawaii, Iceland and new Zealand, most of coastline of Brazil, the entire coastline of South Africa and Namibia, the eastern and southern coastline of Madagascar, the western coastline of Indonesia, western, most eastern and southern coastline of Australia, eastern coastline of Philippines, Japan and Taiwan, part of the Chinese coastline which is directly exposed to the pacific beside many other areas.
The average swell height in these areas is about 2 m minimum on yearly average, which is double what we have specified in our previous example with 1 m wave height, this will be additional clear edge for this apparatus, and might bring it closer to compete effectively with the other renewables, and unlike photovoltaic panels, the power generated from this apparatus will be available all day long and never experience blackout periods, this will be very important in case of selling to the grid when the bid is high enough during these blackout periods, because it’s vital for the grid to rely on stable source of power beside the other existing ones for more stabilization rather than relying on expensive storage systems.
For wave with 1m height and 10 seconds period, the energy generated from the apparatus with configuration like the previous example where the volume of cylinders will be approximately 80 cubic meters, we can estimate every 16 cubic meter volume under water of this apparatus will theoretically generate 1KW constantly, which is adequate for US median household power consumption, and for two meters high swell the required volume will be 4 cubic meters only, and for 4 meters high swell , the required volume will be only one cubic meter.
We have to bear in mind the cost per cubic meter regarding this devices is way less than the average of the other WECs, because most of this device is empty cylinders, although it has big volume, but the cost per cubic meter is very little, so the final cost of energy will depend on how much volume we need to produce this unit of energy, so the efficiency depends only on the wave height, also in the final math and when reliability, duality and accurate prediction are factored in, the cost of watt per cubic meter may be plausible in some areas and for specific niche applications, while in average higher swell areas, it may become game changer in the renewable energy field.
Since this device is heavily labor-intense product, starting from manufacturing to sea and land transportation beside handling ending by installation under sea surface, then this device may have improved ROI in countries with lower income even though the waves are not as high as required since the final cost of the device will be reduced.
Also this apparatus will not require large land area like PV panels, so for big projects it will be far from the city and must sell to the grid almost as the only customer, neither will it require high tower and big blades for wind turbine which might cause noise beside the visual pollution and requires approval from the local communities, this cost and hurdles will be saved since the device has vertical shape and occupy little area because it is mostly occupying volume than area, beside the fees which should be paid to the municipality to rent underwater area—not sea surface area—will be very little if there was any fees in the first place.
Since transmitting the electricity through the grid is the main constituent of the cost of electric power per KWH, and if the cost of power production -in the specified location- of this device is 50% on average of selling price to the grid due transmission loses and the high cost of the grid, in other words, in locations where it is less competitive to the other renewables, and since this device is very close to the coastline and dense urban areas, and since many main cities of the mentioned up countries where this apparatus might be cost-effective to install are on the ocean, so we can extend an XPPE cable from array of devices under sea surface to the shore and connect it to EV charging station and sell the electricity directly to the final customers on discounted rate when compared to the selling price of the grid, this project can’t be done with PV panels for example since it will require large land which will be costly near the beach areas, but since we are getting the power from under the sea surface in this case -which will not require to invest in big land-, then we can do this set up easily with minimum cost.
Installing many charging stations on the western coast of the United States for example, where the road is close to the coastline and the waves are high, can reduce the cost of the trip on this road by EV due to competition from many charging stations extracting the electricity from under sea surface on this long road.
This device can also satisfy the growing demand for power from the rising AI agents, which require intense energy, these AI agents could cause sudden sharp increment in power demand which will most likely create pressure on the energy supply chains to satisfy this sudden jump in demand.
Using this device may be better solution than relying on SMRs—small modular reactor- since this type requires highly enriched uranium—HEU- and may be restricted by law in some countries due to the proliferation issues.
Since data centers requires huge energy for cooling, so some countries and locations like Iceland, Norway and Alaska where very high swells with cold weather are available most of the year, then placing data centers relying on these device in these locations may be plausible solution.
Also placing the computing edge centers along with data centers near these new renewable energy source locations even in non-cold weather locations, will reduce the carbon foot print and save the power transmission loss and can extend the list of locations choices which could be beneficial for the skilled labors to work near their living places.
The device will be more effective especially for these projects which are accompanied with one of wave amplification solutions for commercial scale, since it will produce exponential level of power because of the amplification during the low energy wave’s times, which we can’t do with the other renewables in effective method, so the established business will still be operational and running even during low energy period and the service will still be able to meet the commercial scale demand.
Selling the power to serve setups like these will be more advantageous than selling to the grid, especially during low bid periods where competition from the other renewables will come to play and drive the bid price down further more.
This apparatus can bridge very important gap with the other renewables regarding blackout and predicted power production, and can also be the optimal solution for many other different demands due to its unique merits of being close to the demand areas, this advantage is more essential in electric power than the other sources of energy, because the shipping cost for crude oil for example is nothing compared to the cost of transmitting the electric power over the grid.
So we can summarize the advantages as following:
- 1. Scalability Solution
The multi-chamber vertical design with synchronized pistons and single PTO addresses a critical limitation of traditional hydrostatic WECs (which struggle with volume/efficiency trade-offs).
By partitioning a large volume into smaller chambers, it maintains sensitivity to pressure changes while enabling cost-effective scaling.
- 2.
- Dynamic Responsiveness
The real-time adjustment of parameters (air moles, piston mass, gear ratios) to match wave characteristics is novel for hydrostatic WECs. Most existing systems are static or semi-static.
If implemented effectively, this could significantly improve energy capture efficiency (claimed >90% vs. 20–40% for conventional WECs).
- 3.
- Wave Amplification Integration
Proactively manipulating wave height (via shoaling ramps, barriers, or funnels) to exploit the exponential energy-height relationship is underexplored in WECs. This could make hydrostatic harvesting viable in lower-energy wave climates.
- 4.
- Submerged Reliability
Avoiding surface hazards (storms, corrosion) while maintaining scalability is a key advantage over buoy-based or oscillating water column WECs.
Environmental and Ethical Considerations
The development and deployment of marine energy technologies must be guided by fundamental ecological principles and environmental stewardship. As we advance this wave energy conversion system, we establish the following ethical framework:
1. Precautionary Principle
- o Any design element or deployment strategy that poses demonstrated risk to marine ecosystems, particularly sensitive habitats like coral reefs, shall be immediately reconsidered or abandoned
-
o Potential impacts must be evaluated through:
- ▪
- Baseline ecological surveys
- ▪
- Small-scale pilot testing with environmental monitoring
- ▪
- Continuous impact assessment during operation
2. Ecosystem Protection Priorities
The marine environment presents unique conservation challenges:
- o Coral reef systems may require centuries to recover from damage
- o Benthic habitats support complex, poorly understood food webs
- o Many marine species have critical habitat requirements that energy infrastructure could disrupt
3. Design Imperatives
Our technology incorporates multiple safeguards:
- o Non-toxic, marine-grade materials to prevent chemical contamination
- o Minimal seabed footprint through vertical buoyant design
- o Anti-fouling systems that avoid biocidal coatings
- o Deployment siting that avoids ecologically sensitive areas
4. Responsible Innovation Protocol
We commit to:
- o Transparent environmental impact assessments before deployment
- o Open collaboration with marine conservation organizations
- o Willingness to suspend or modify projects demonstrating adverse ecological effects
- o Development of decommissioning plans that restore original seabed conditions
5. Holistic Sustainability Perspective
True sustainability requires balancing:
- o Renewable energy generation needs
- o Ecosystem preservation imperatives
- o Climate change mitigation priorities
- o Responsible resource utilization
This ethical framework recognizes that marine energy development must serve the broader goal of environmental sustainability. We maintain that technological progress should never come at the expense of irreversible ecological harm, particularly in marine environments where the full consequences of disturbance may not be apparent for decades.
The proposed wave energy converter has been designed specifically to:
- Minimize seabed disturbance through floating configurations
- Eliminate toxic emissions or discharges
- Avoid interference with migratory marine species
- Maintain water quality and flow patterns
We invite independent environmental review of these systems and commit to ongoing monitoring to verify these ecological protections. Only through such rigorous, ethical development can marine renewable energy truly contribute to a sustainable future.
Patent Claims
1. A wave energy conversion system comprising:
- o A plurality of vertically stacked air chambers submerged below sea surface;
-
o Each chamber containing:
- ▪
- A movable piston mechanically linked to a common central shaft;
- ▪
- A gas volume responsive to hydrostatic pressure fluctuations;
-
o Configured in either:
- (a) A volume-reduction arrangement where chamber volumes decrease quantitatively from bottom to top chambers, or
- (b) An area-reduction arrangement where piston cross-sectional areas decrease quantitatively from top to bottom chambers while maintaining equal chamber volumes;
- o Wherein said configuration synchronizes piston displacements in response to wave-induced pressure changes; and
- o A single power take-off (PTO) unit operably connected to said central shaft.
2. The system of claim 1,further comprising:
-
o A dual-seal piston mechanism featuring:
- ▪
- An internal lubricant-filled pocket between piston and chamber wall;
- ▪
- An external lubricant-filled pocket between piston and chamber base;
- ▪
- A fluid communication channel connecting said pockets;
- ▪
- A containment fabric comprising nano-carbon fiber material surrounding said pockets;
-
o Wherein said mechanism:
- ▪
- Maintains pressure equilibrium across sealing surfaces;
- ▪
- Reduces frictional losses during piston oscillation;
- ▪
- Resists marine environmental degradation.
3. The system of claim 1,further comprising:
- o A dynamic response control system configured to:(a) Adjust gas mole quantity within chambers via valved connections to a pressurized reservoir;(b) Modify effective piston mass through controlled fluid transfer between onboard reservoirs;(c) Apply variable spring forces to pistons via adjustable tension mechanisms;(d) Alter gear ratios in the PTO system;
- o Wherein said adjustments maintain near-isothermal gas behavior across varying wave conditions.
4. A wave amplification method
for enhancing system efficiency, comprising:
- o At least one of:(a) Constructive wave interference using spaced barriers;(b) Gradual seabed slope modification to enhance shoaling;(c) Converging barrier pairs forming focal corridors;
- o Wherein said method increases wave height at the device location by ≥50%;
- o And wherein energy harvesting devices are positioned in regions of amplified wave height.
Figure 3. System Components and Operational Schematics:.
Here following 15 referenced drawings of figure 3
(All drawings created expressly for this invention by Eng. Feras A.R. Fadl)
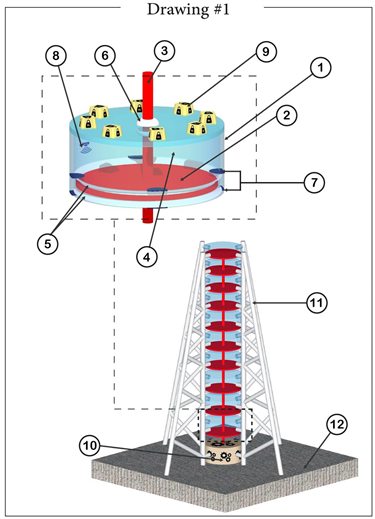
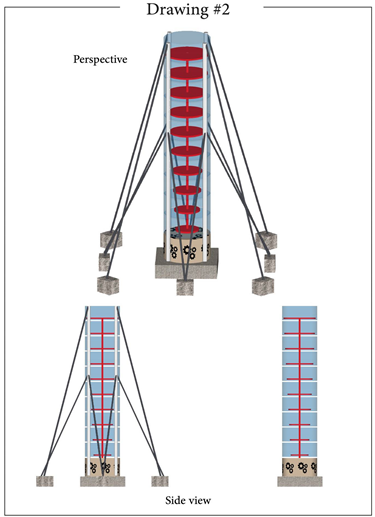
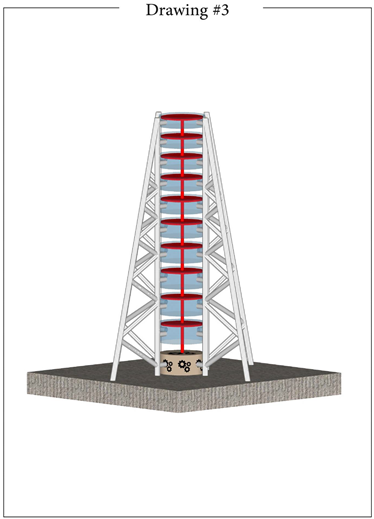
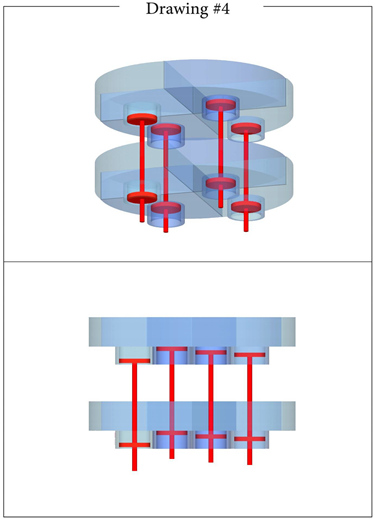
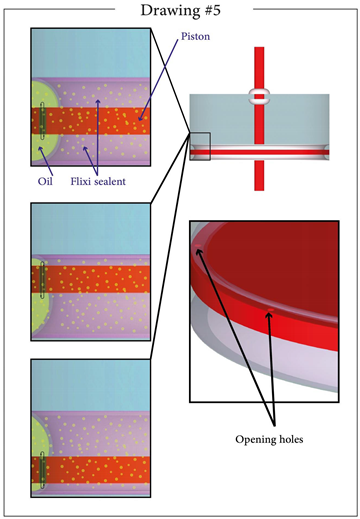
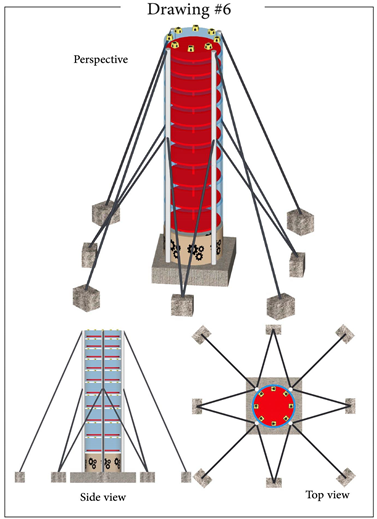
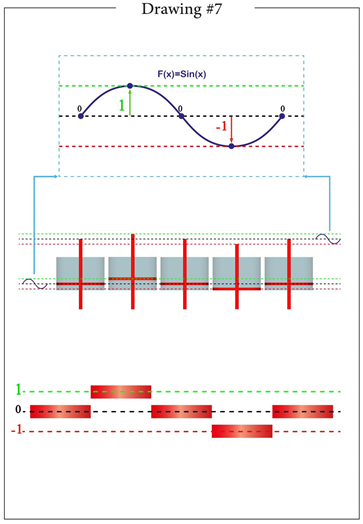
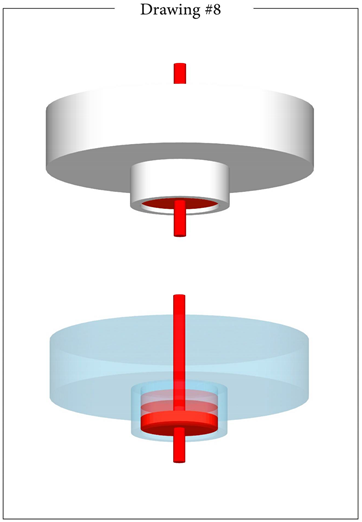
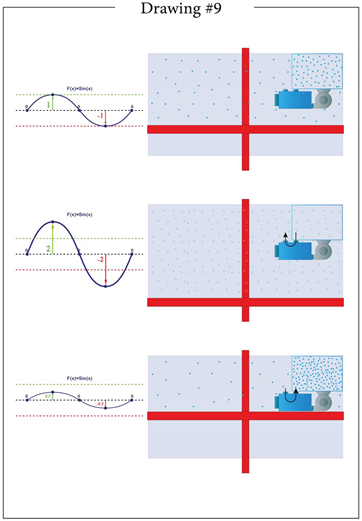
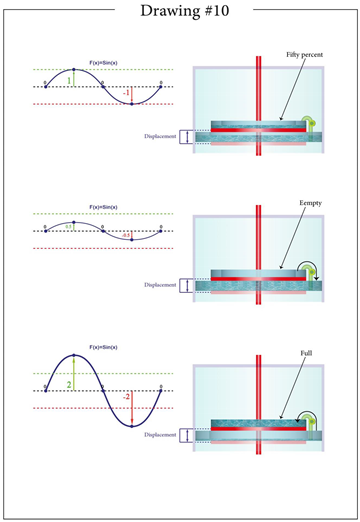
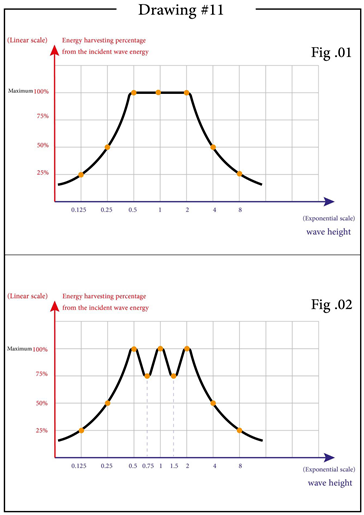
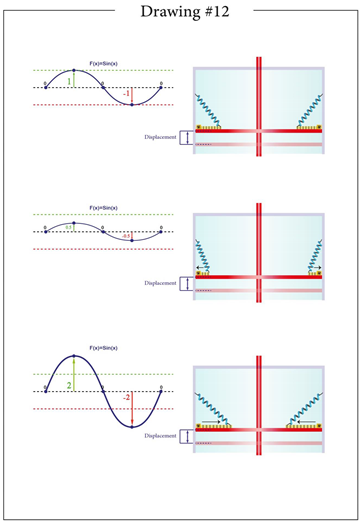
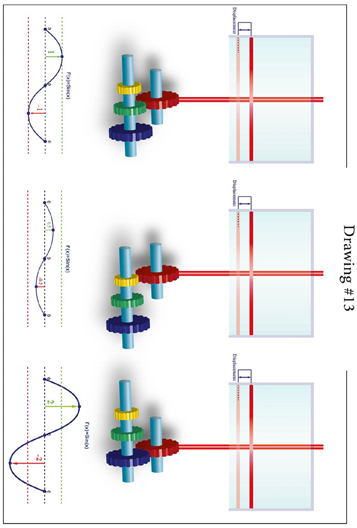
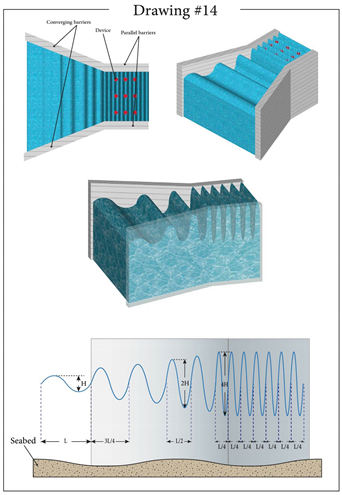
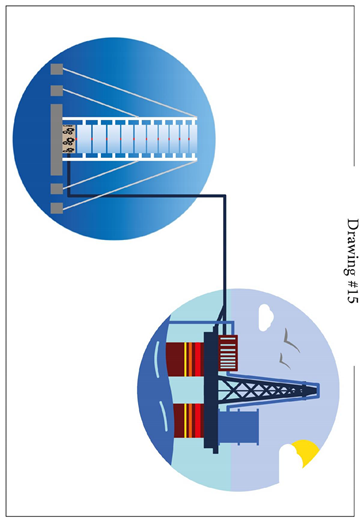
References
- Flexible multibody dynamics modelling of point-absorber wave energy converters - Scientific Figure on ResearchGate. Available from: https://www.researchgate.net/figure/Types-of-WECs-a-attenuator-b-point-absorber-c-oscillating-wave-surge-converter-d_fig1_324999559 [Online].
- A Flower Pollination Method Based Global Maximum Power Point Tracking Strategy for Point-Absorbing Type Wave Energy Converters - Scientific Figure on ResearchGate. Available from: https://www.researchgate.net/figure/Point-absorber-type-wave-energy-converter-WEC_fig1_332281345 [Online].
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



