Submitted:
10 March 2025
Posted:
11 March 2025
You are already at the latest version
Abstract
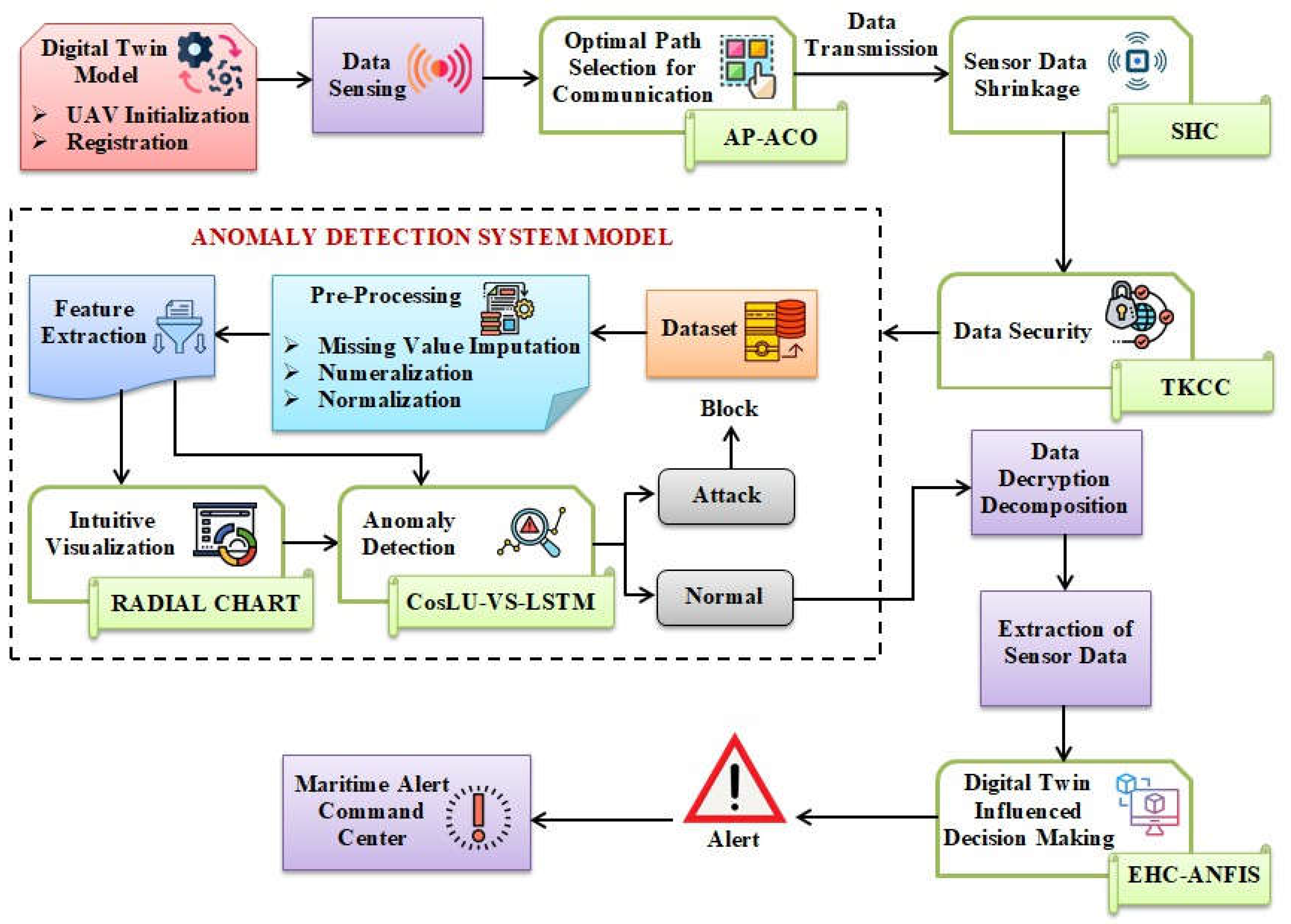
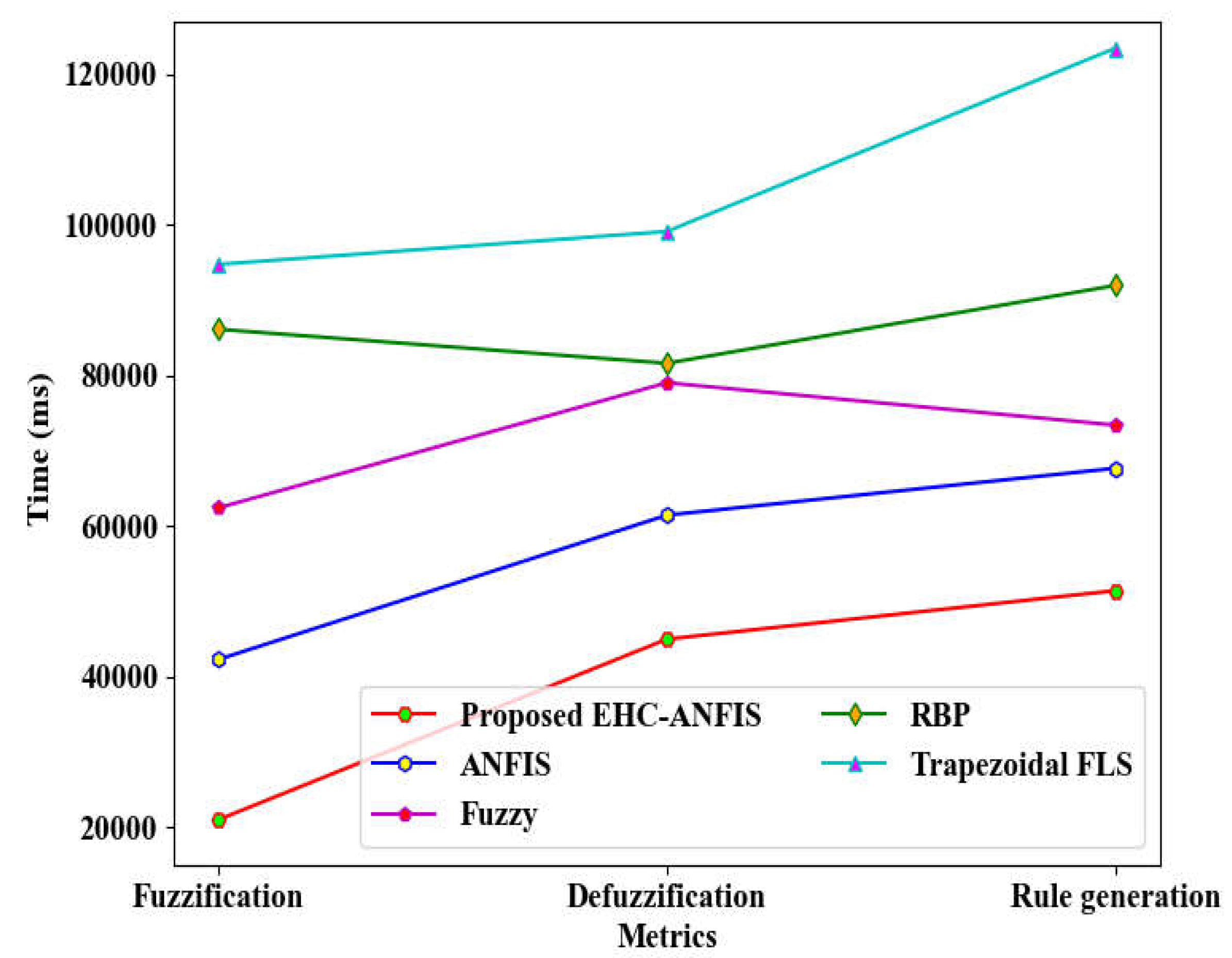
The underwater conditions of the coastal ecosystem require careful monitoring to anticipate potential environmental hazards. Moreover, the unique characteristics of the marine underwater environment have presented numerous challenges for the advancement of underwater sensor networks. Current studies have not extensively integrated Digital Twins with underwater sensor networks aimed at monitoring the marine ecosystem. Consequently, this study proposes a decision-making framework based on Underwater Digital Twins (UDT) utilizing the Exponential Hyperbolic Crisp Adaptive Network-based Fuzzy Inference System (EHC-ANFIS). The process begins with the initialization and registration of the Underwater Autonomous Vehicle (UAV). Subsequently, data is collected from the sensor network and relayed to the UDT. To ensure efficient data transmission, the optimal path is determined using Adaptive Pheromone Ant Colony Optimization (AP-ACO). Following this, data compression is achieved through the Sliding-Huffman Coding (SHC) algorithm. To enhance data security, the Twisted Koblitz Curve Cryptography (TKCC) method is employed. Additionally, an Anomaly Detection System (ADS) is trained, which involves the collection and pre-processing of sensor network data. The Radial Chart is then utilized for effective visualization. Anomalies are detected using the CosLU - Variational Shake - Long Short-Term Memory (CosLU -VS-LSTM) approach. For standard data, decision-making based on UDT is conducted using EHC-ANFIS, with a fuzzification duration of 21045 milliseconds. Finally, alerts are dispatched to the Maritime Alert Command Centre (MACC). This approach enhances maritime communication and monitoring along coastal areas, with specific reference to the Coromandel Coast, thereby contributing to the protection of the coastal ecosystem.
Keywords:
1. Introduction
- -
- It facilitates the monitoring of the Coromandel Coast through a Digital Twins-based decision-making process that employs the AI-driven EHC-ANFIS technique.
- -
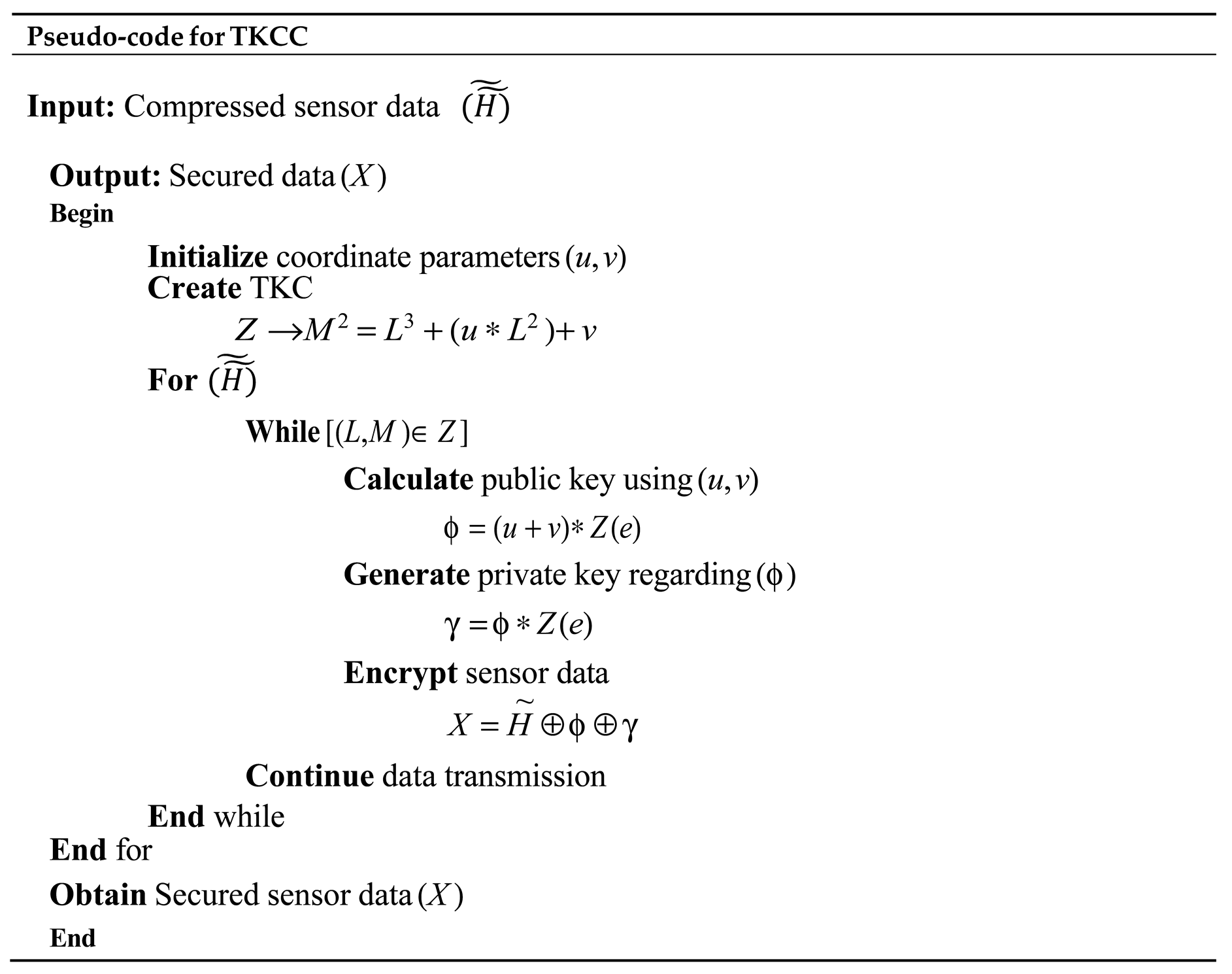
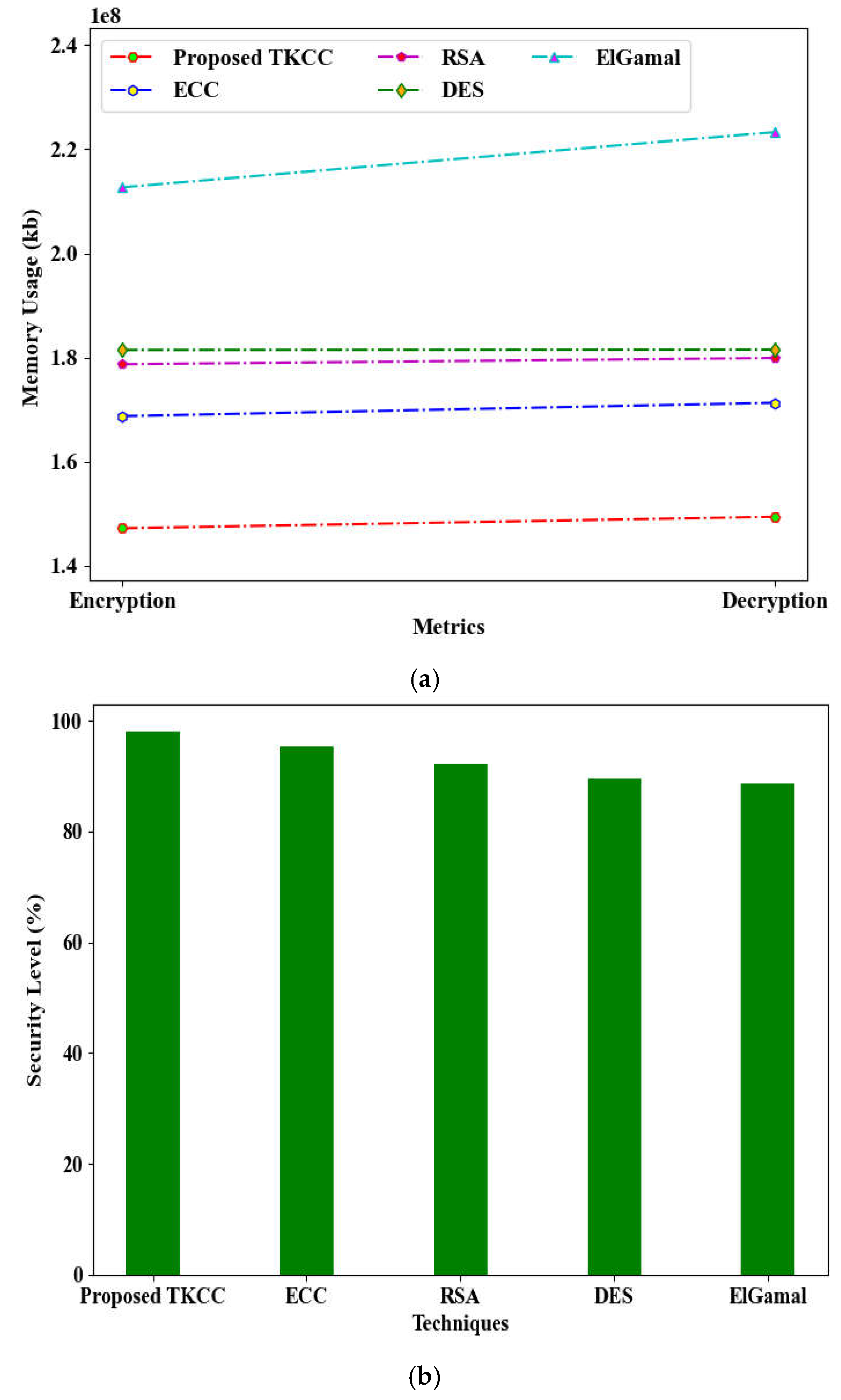
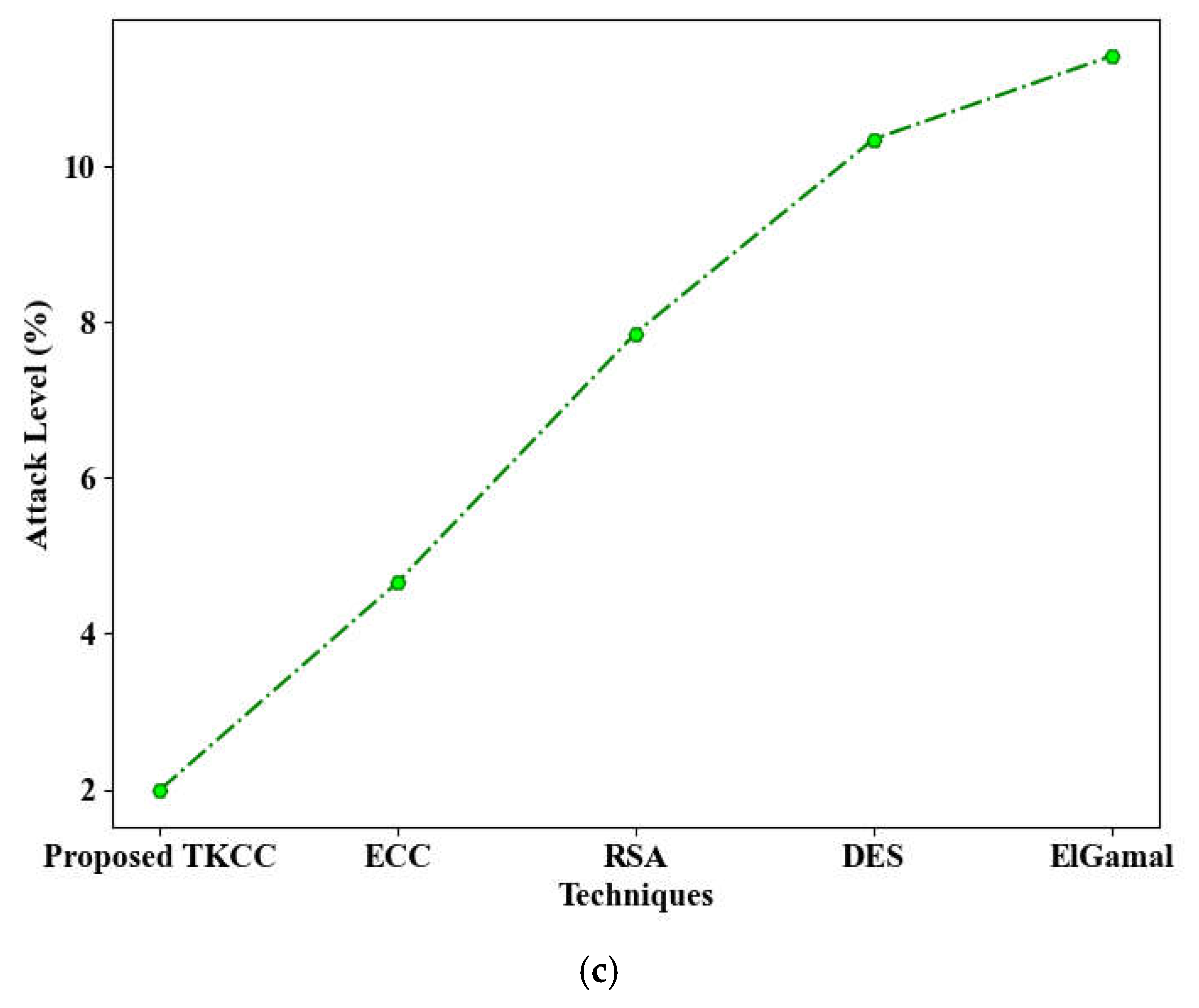
- It safeguards the underwater sensor data within the maritime ecosystem by implementing the TKCC method.
- -
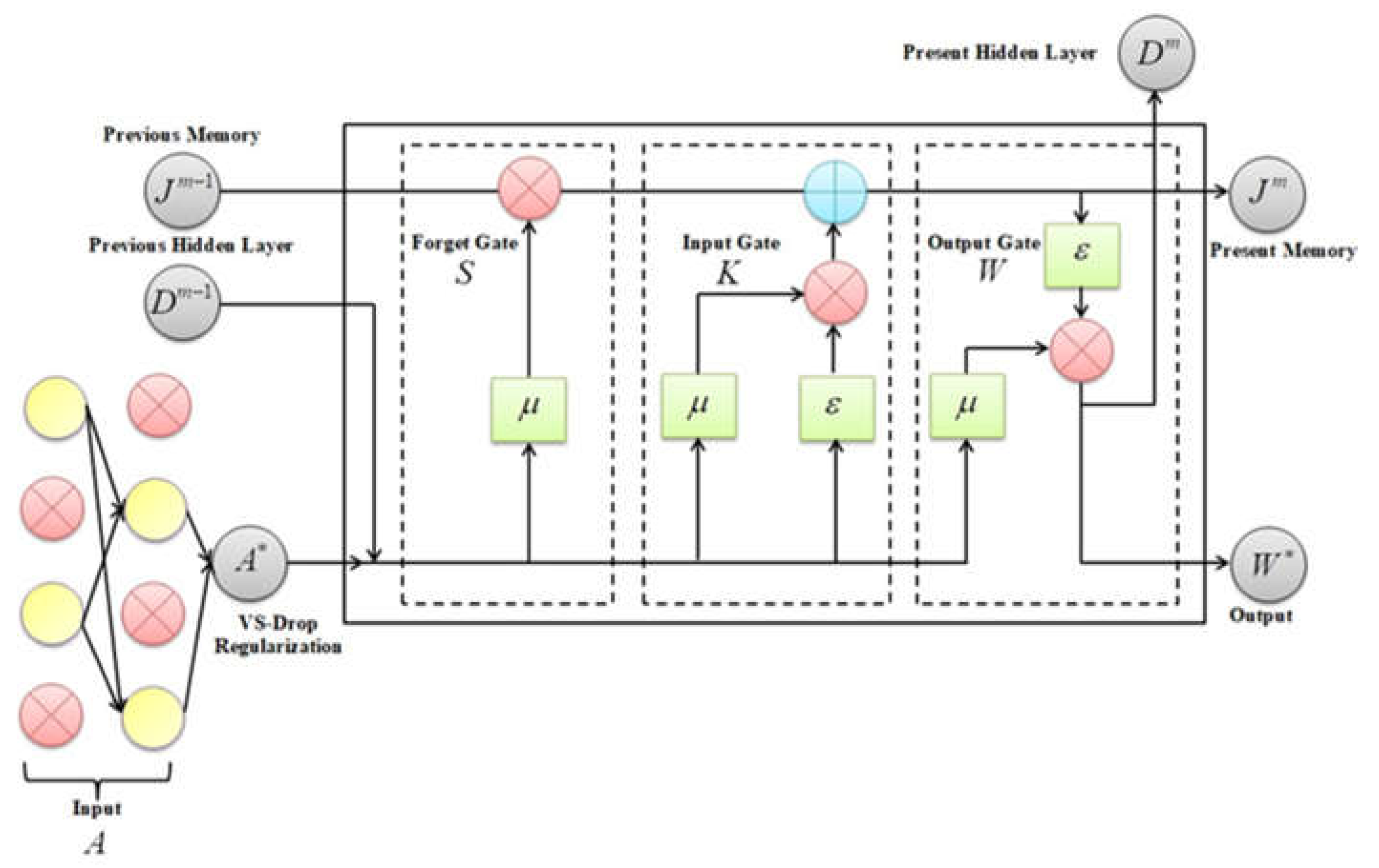
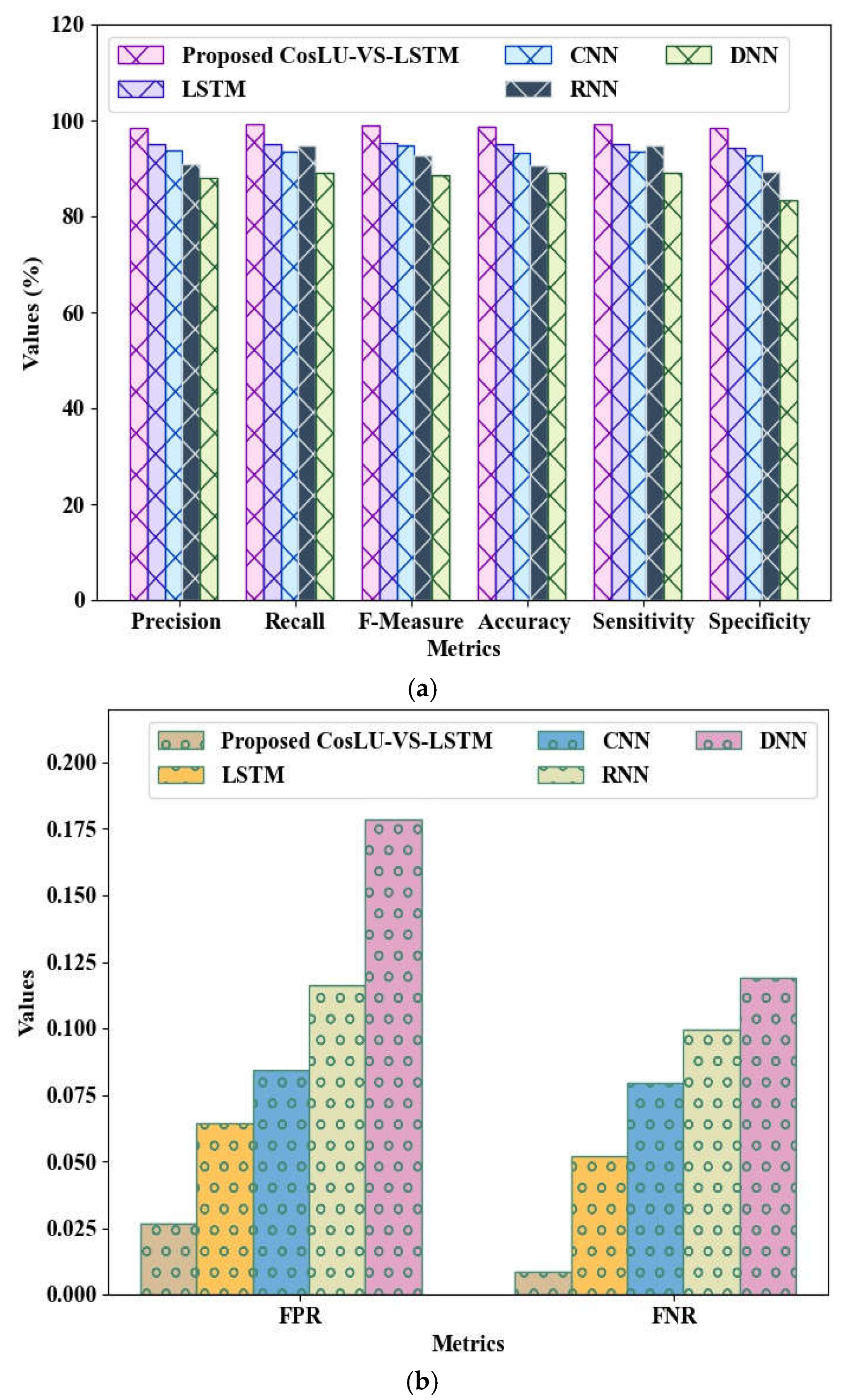
- It enables the analysis of anomalous patterns during data transmission through the Anomaly Detection System (ADS) model, utilizing the CosLU-VS-LSTM deep learning classifier.
- -
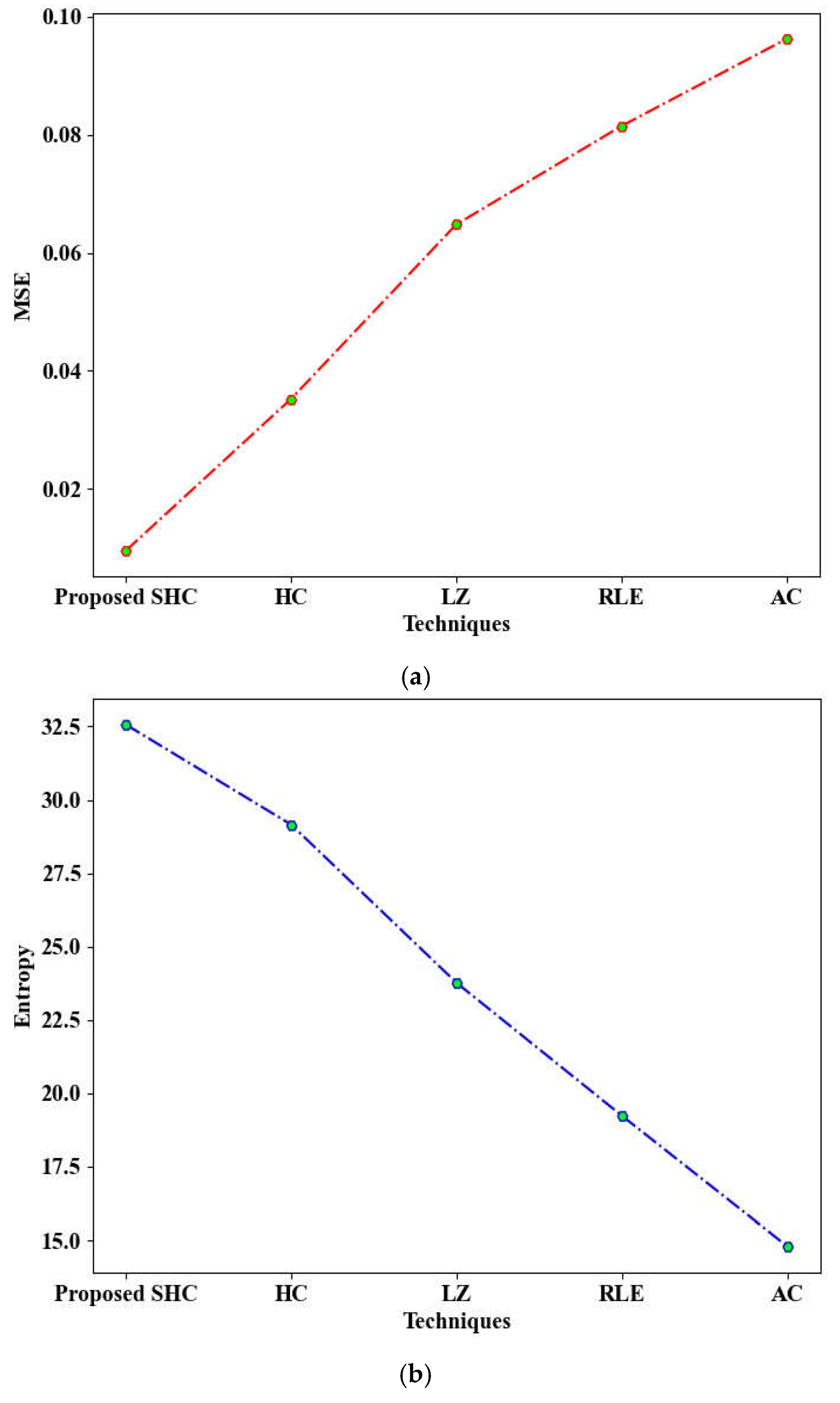
- To ensure efficient data transmission within a static bandwidth, data compression using the SHC model.
- -
- Lastly, it identifies the optimal path for data transmission to enhance communication efficiency by employing the AP-ACO technique.
2. Materials and Methods: Maritime Communication and Monitoring Methodology
2.1. UAV Initialization and Registration
2.2. Data Sensing
2.3. Optimal Path Selection for Communication
2.4. Sensor Data Shrinkage


2.5. Data Security


2.6. Anomaly Detection System Model
2.6.1. Dataset

2.6.2. Pre-Processing
- ✓
- Missing Value Imputation
- ✓
- Numeralization
- ❖
- Normalization
2.6.3. Feature Extraction
2.6.4. Intuitive Visualization
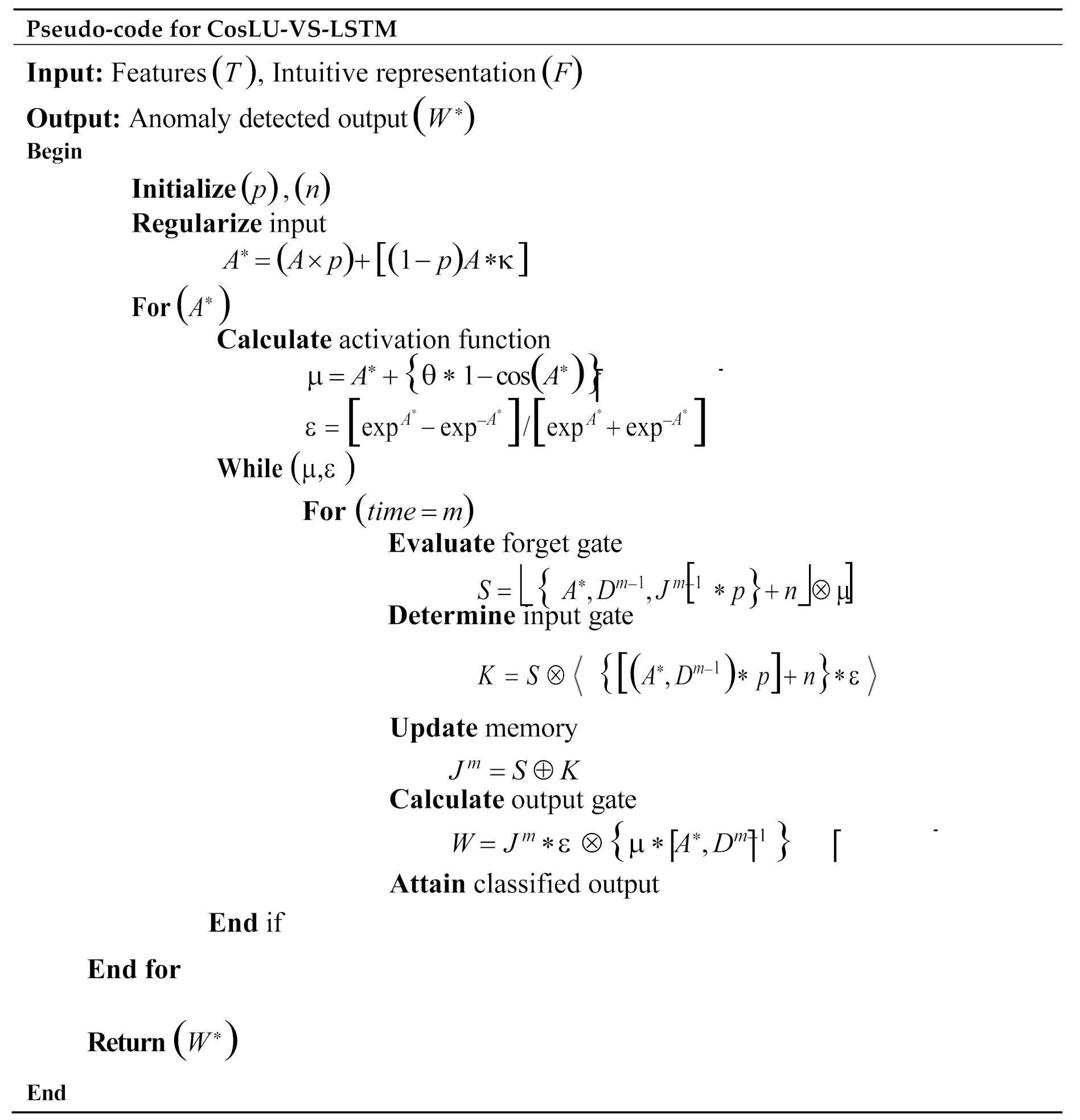
2.6.5. Anomaly Detection
2.7. Data Decryption and Decomposition
2.8. Extraction of Sensor Data
2.9. Digital Twins Influenced Decision-Making
- ✓
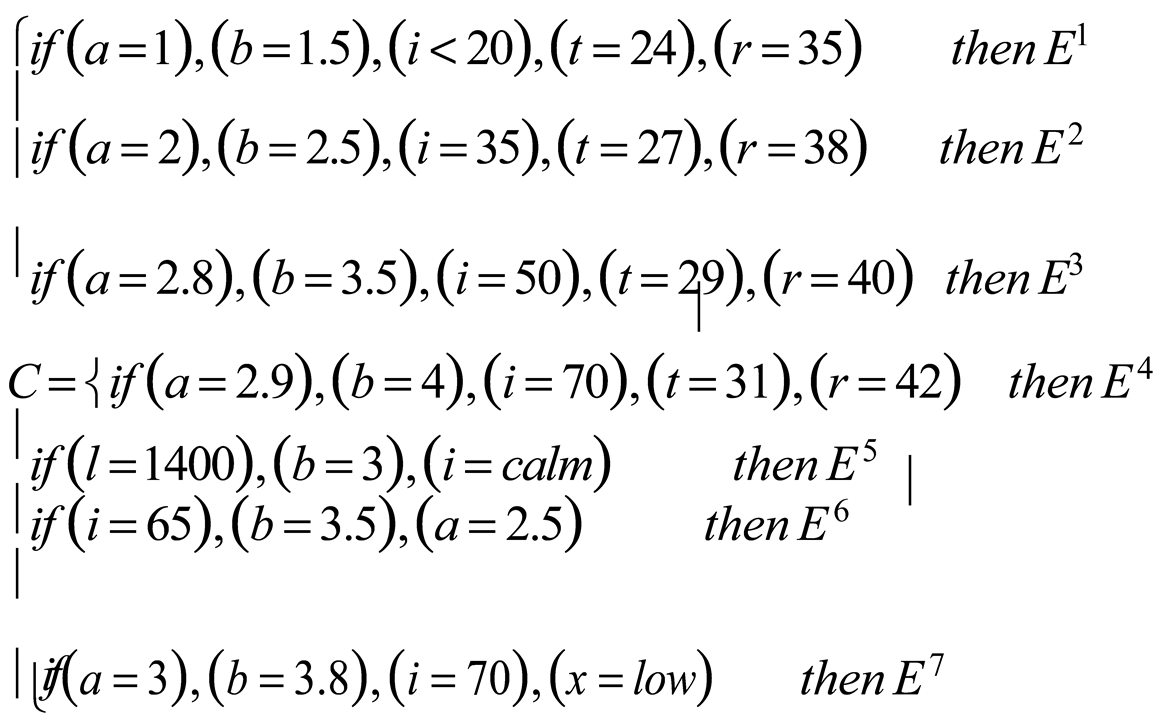
- Rule
- ✓
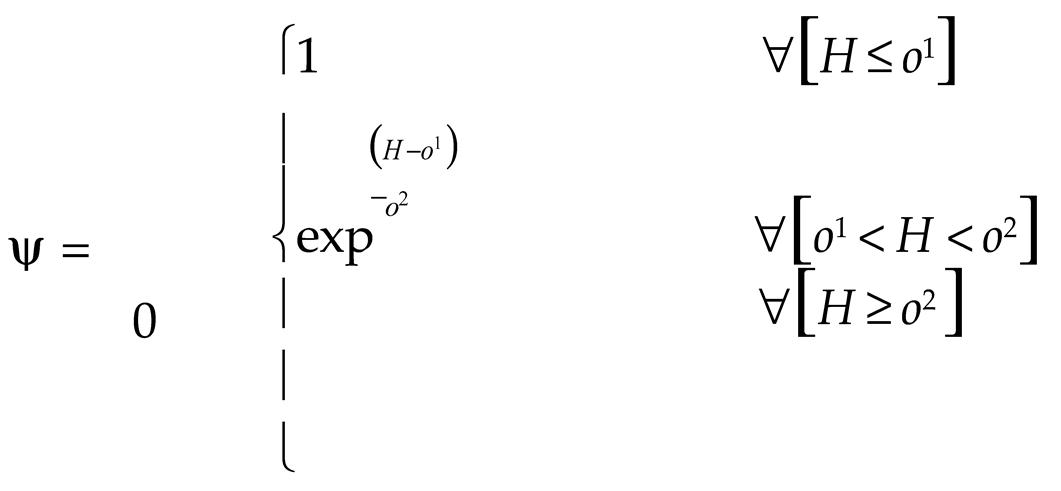
- Membership Function
- ✓
- Fuzzification
- ✓
- Defuzzification
2.10. Alert to Maritime Alert Command Centre
3. Results and Discussions
3.1. Dataset Description
3.2. Performance Assessment
3.3. Comparative Analysis
4. Conclusions
Dataset Link
References
- Adityawan, M. B., Nurendyastuti. Development of a tsunami early warning system on the coast of Palu based on maritime wireless communication. Progress in Disaster Science 2023, 19, 1–11. [Google Scholar] [CrossRef]
- Ahuja, N. J., Kumar, A., Thapliyal, M., Dutt, S., Kumar, T., Aarhus, D. A. D. J. P., Konstantinou, C., & Choo, K.-K. R. (2023). Blockchain for unmanned underwater drones: Research issues, challenges, trends and future directions. Journal of Network and Computer Applications, 215, 1–49. https://doi.org/10.1016/j.jnca.2023.103649.
- Ashraf, I., Park, Y., Hur, S., Kim, S. W., Alroobaea, R., Zikria, Y. Bin, & Nosheen, S. (2023). A Survey on Cyber Security Threats in IoT-Enabled Maritime Industry. IEEE Transactions on Intelligent Transportation Systems, 24(2), 1–14. https://doi.org/10.1109/TITS.2022.3164678.
- Barbie, A., Pech, N., Hasselbring, W., Flogel, S., Wenzhofer, F., Walter, M., Shchekinova, E., Busse, M., Turk, M., Hofbauer, M., & Sommer, S. (2021). Developing an Underwater Network of Ocean Observation Systems With Digital Twin Prototypes - A Field Report From the Baltic Sea. IEEE Internet Computing, 26(3), 1–8. https://doi.org/10.1109/MIC.2021.3065245.
- Bi, J., Wang, P., Zhang, W., Bao, K., & Qin, L. (2024). Research on the Construction of a Digital Twin System for the Long-Term Service Monitoring of Port Terminals. Journal of Marine Science and Engineering, 12(7), 1–16. https://doi.org/10.3390/jmse12071215.
- Charpentier, V., Slamnik-Kriještorac, N., Landi, G., Caenepeel, M., Vasseur, O., & Marquez- Barja, J. M. (2024). Paving the way towards safer and more efficient maritime industry with 5G and Beyond edge computing systems. Computer Networks, 250, 1–16. https://doi.org/10.1016/j.comnet.2024.110499.
- Dai, M., Li, Y., Li, P., Wu, Y., Qian, L., Lin, B., & Su, Z. (2022). A Survey on Integrated Sensing, Communication, and Computing Networks for Smart Oceans. Journal of Sensor and Actuator Networks, 11(4), 1–29. https://doi.org/10.3390/jsan11040070.
- Epiphaniou, G., Hammoudeh, M., Yuan, H., Maple, C., & Ani, U. (2023). Digital twins in cyber effects modelling of IoT/CPS points of low resilience. Simulation Modelling Practice and Theory, 125, 1–16. https://doi.org/10.1016/j.simpat.2023.102744.
- Fera, F., & Spandonidis, C. (2024). A Fault Diagnosis Approach Utilizing Artificial Intelligence for Maritime Power Systems within an Integrated Digital Twin Framework. Applied Sciences, 14(18), 1–16. https://doi.org/10.3390/app14188107.
- Golovan, A., Mateichyk, V., Gritsuk, I., Lavrov, A., Smieszek, M., Honcharuk, I., & Volska, O. (2024). Enhancing Information Exchange in Ship Maintenance through Digital Twins and IoT : A Comprehensive Framework. Computers, 13, 2024.
- Jayasinghe, S. C., Mahmoodian, M., Sidiq, A., Nanayakkara, T. M., Alavi, A., Mazaheri, S., Shahrivar, F., Sun, Z., & Setunge, S. (2024). Innovative digital twin with artificial neural networks for real-time monitoring of structural response: A port structure case study. Ocean Engineering, 312, 1–15. https://doi.org/10.1016/j.oceaneng.2024.119187.
- Kutzke, D. T., Carter, J. B., & Hartman, B. T. (2021). Subsystem selection for digital twin development: A case study on an unmanned underwater vehicle. Ocean Engineering, 223, 1–15. https://doi.org/10.1016/j.oceaneng.2021.108629.
- Madusanka, N. S., Fan, Y., Yang, S., & Xiang, X. (2023). Digital Twin in the Maritime Domain: A Review and Emerging Trends. Journal of Marine Science and Engineering, 11(5), 1–31. https://doi.org/10.3390/jmse11051021.
- Majidi Nezhad, M., Neshat, M., Sylaios, G., & Astiaso Garcia, D. (2024). Marine energy digitalization digital twin’s approaches. Renewable and Sustainable Energy Reviews, 191, 1–18. https://doi.org/10.1016/j.rser.2023.114065.
- Mishra, A., Kumar, R., & Pradesh, U. (2022). Deployment of Biosensors in Aquatic Bio- Optical Communication System & its Applications in Gulf of Mannar. NeuroQuantology, 12(13), 1–7. https://doi.org/10.48047/nq.2022.20.13.NQ88533.
- Mohsan, S. A. H., Mazinani, A., Othman, N. Q. H., & Amjad, H. (2022). Towards the internet of underwater things: a comprehensive survey. Earth Science Informatics, 15(2), 1–31. https://doi.org/10.1007/s12145-021-00762-8.
- Pribadi, K. S., Abduh, M., Wirahadikusumah, R. D., Hanifa, N. R., Irsyam, M., Kusumaningrum, P., & Puri, E. (2021). Learning from past earthquake disasters: The need for knowledge management system to enhance infrastructure resilience in Indonesia. International Journal of Disaster Risk Reduction, 64, 1–18. https://doi.org/10.1016/j.ijdrr.2021.102424.
- Ramírez-Herrera, M. T., Coca, O., & Vargas-Espinosa, V. (2022). Tsunami Effects on the Coast of Mexico by the Hunga Tonga-Hunga Ha’apai Volcano Eruption, Tonga. Pure and Applied Geophysics, 179(4), 1117–1137. https://doi.org/10.1007/s00024-022-03017-9.
- Suppasri, A., Maly, E., Kitamura, M., Syamsidik, Pescaroli, G., Alexander, D.F., & Imamura, F. (2021). Cascading disasters triggered by tsunami hazards: A perspective for critical infrastructure resilience and disaster risk reduction. International Journal of Disaster Risk Reduction, 66, 1–11. https://doi.org/10.1016/j.ijdrr.2021.102597.
- Vasilijevic, A., Brönner, U., Dunn, M., García-Valle, G., Fabrini, J., Stevenson-Jones, R., Bye, B. L., Mayer, I., Berre, A., Ludvigsen, M., & Nepstad, R. (2024). A Digital Twin of the Trondheim Fjord for Environmental Monitoring—A Pilot Case. Journal of Marine Science and Engineering, 12(9), 1–25. https://doi.org/10.3390/jmse12091530.
- Wang, K., Xu, H., Wang, H., Qiu, R., Hu, Q., & Liu, X. (2024). Digital twin-driven safety management and decision support approach for port operations and logistics. Frontiers in Marine Science, 11, 1–23. https://doi.org/10.3389/fmars.2024.1455522.
- Wang, P., Ma, X., Fei, L., Zhang, H., Zhao, D., & Zhao, J. (2023). When the digital twin meets the preventive conservation of movable wooden artifacts. Heritage Science, 11(1), 1–20. https://doi.org/10.1186/s40494-023-00894-8.
- Werbińska-Wojciechowska, S., Giel, R., & Winiarska, K. (2024). Digital Twin approach for operation and maintenance of transportation system – systematic review. Sensors 2024, 24, 1–62.
- Zhou, B., Zhang, X., Wan, X., Liu, T., Liu, Y., Huang, H., & Chen, J. (2024). Development and Application of a Novel Tsunami Monitoring System Based on Submerged Mooring. Sensors, 24(18), 1–14. https://doi.org/10.3390/s24186048.
- Zhou, F., Yu, K., Xie, W., Lyu, J., Zheng, Z., & Zhou, S. (2024 a). Digital Twin-Enabled Smart Maritime Logistics Management in the Context of Industry 5.0. IEEE Access, 12, 1–12. https://doi.org/10.1109/ACCESS.2024.3354838.

| Method | TPR (%) | TNR (%) |
|---|---|---|
| Proposed CosLU-VS-LSTM | 98.72 | 98.31 |
| LSTM | 95.14 | 94.37 |
| CNN | 93.43 | 92.75 |
| RNN | 94.25 | 89.22 |
| DNN | 89.63 | 83.37 |
| Techniques | Compression Time (ms) |
|---|---|
| Proposed SHC | 140758 |
| HC | 198563 |
| LZ | 253564 |
| RLE | 314748 |
| AC | 398756 |
| Author’s name | Aim | Advantages | Disadvantages |
|---|---|---|---|
|
Proposed Model |
Underwater digital twins sensor network-based maritime communication and monitoring of the Coromandel Coast. | The proposed model efficiently performed maritime communication and Coromandel Coast monitoring with superior outcomes. | However, the types of coastal ecosystems such as coral reefs, salt marshes, mangrove forests, kelp forests, etc were not considered. |
|
(Ramírez-Herrera et al., 2022) |
Hunga Tonga-Hunga Ha’apai volcano eruption-assisted Tsunami effects on the coast of mexico |
This framework proficiently analyzed the Tsunami effects and its associated hazards. |
But, this Tsunami warning system had high false alarm rate. |
|
(Pribadi et al., 2021) |
An effective knowledge management system based on past earthquake disasters |
This framework efficiently enhanced environmental monitoring. |
But, it incurred considerable initial setup cost. |
|
(Suppasri et al., 2021) |
Disaster risk reduction framework |
This model had higher significance in coastal management. |
However, it was less effective due to the complex system. |
|
(Epiphaniou et al., 2023) |
Digital twins in cyber effects modeling of IoT paradigm |
This framework significantly reduced the human intervention; thereby |
But, it had energy constrained issues. |
| enhancing the model’s efficiency. | |||
|
(Zhou et al., 2024) |
Tsunami monitoring system via submerged mooring. |
This model had higher resilience and good security |
But, it required massive amount of real-time data. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).



