
Submitted:
20 December 2024
Posted:
24 December 2024
You are already at the latest version
Abstract
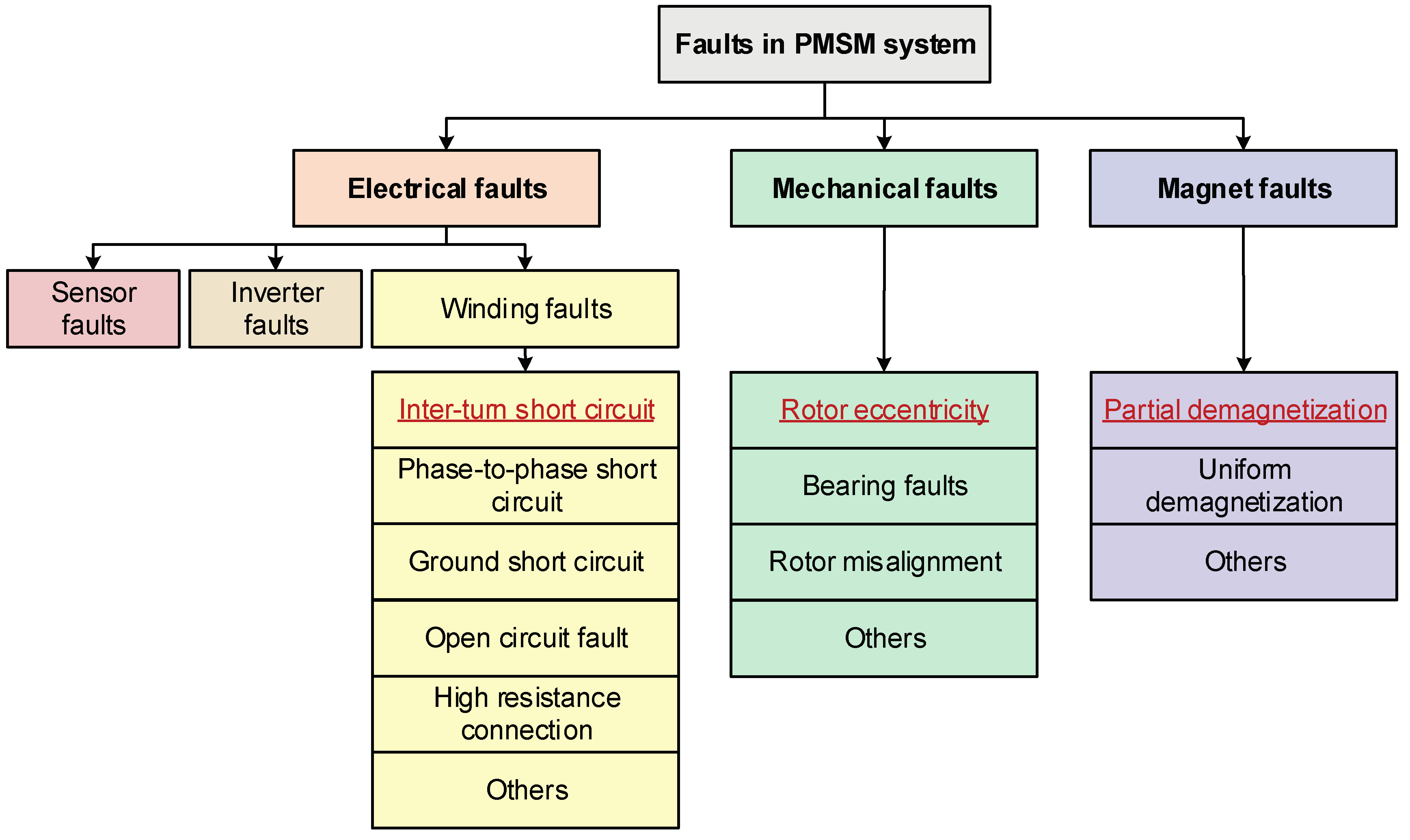
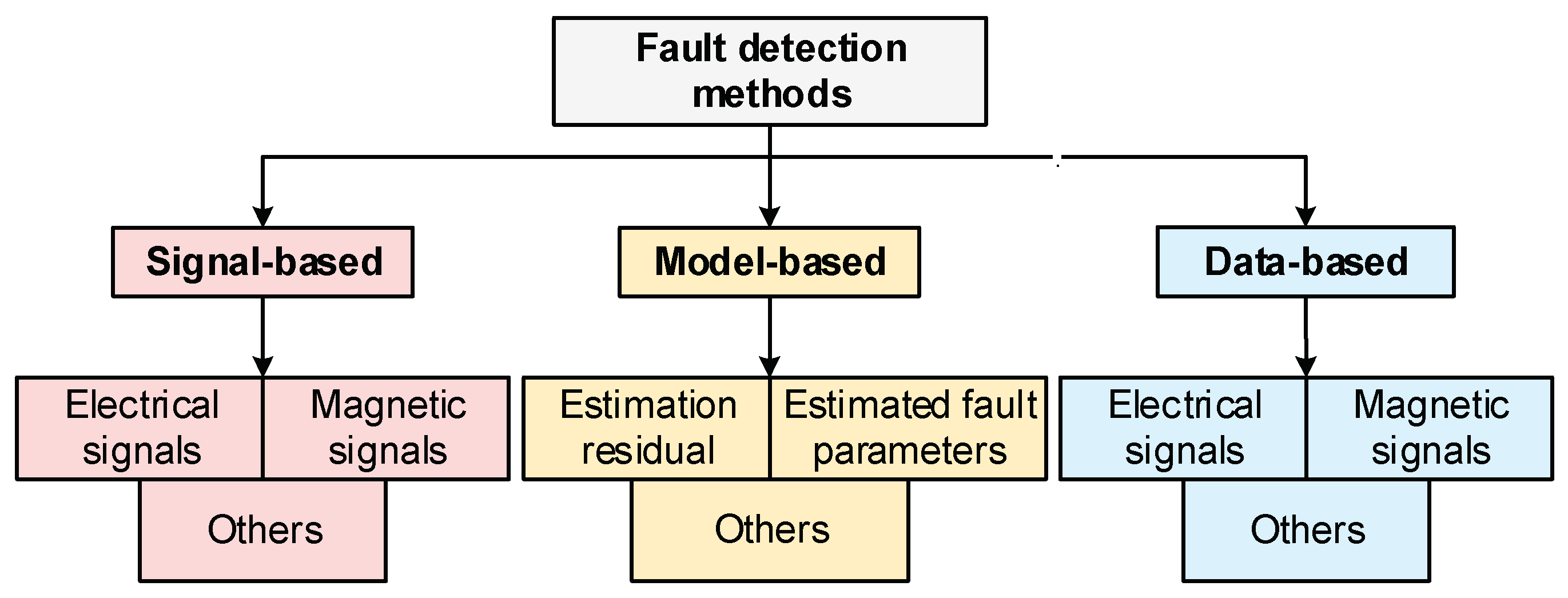
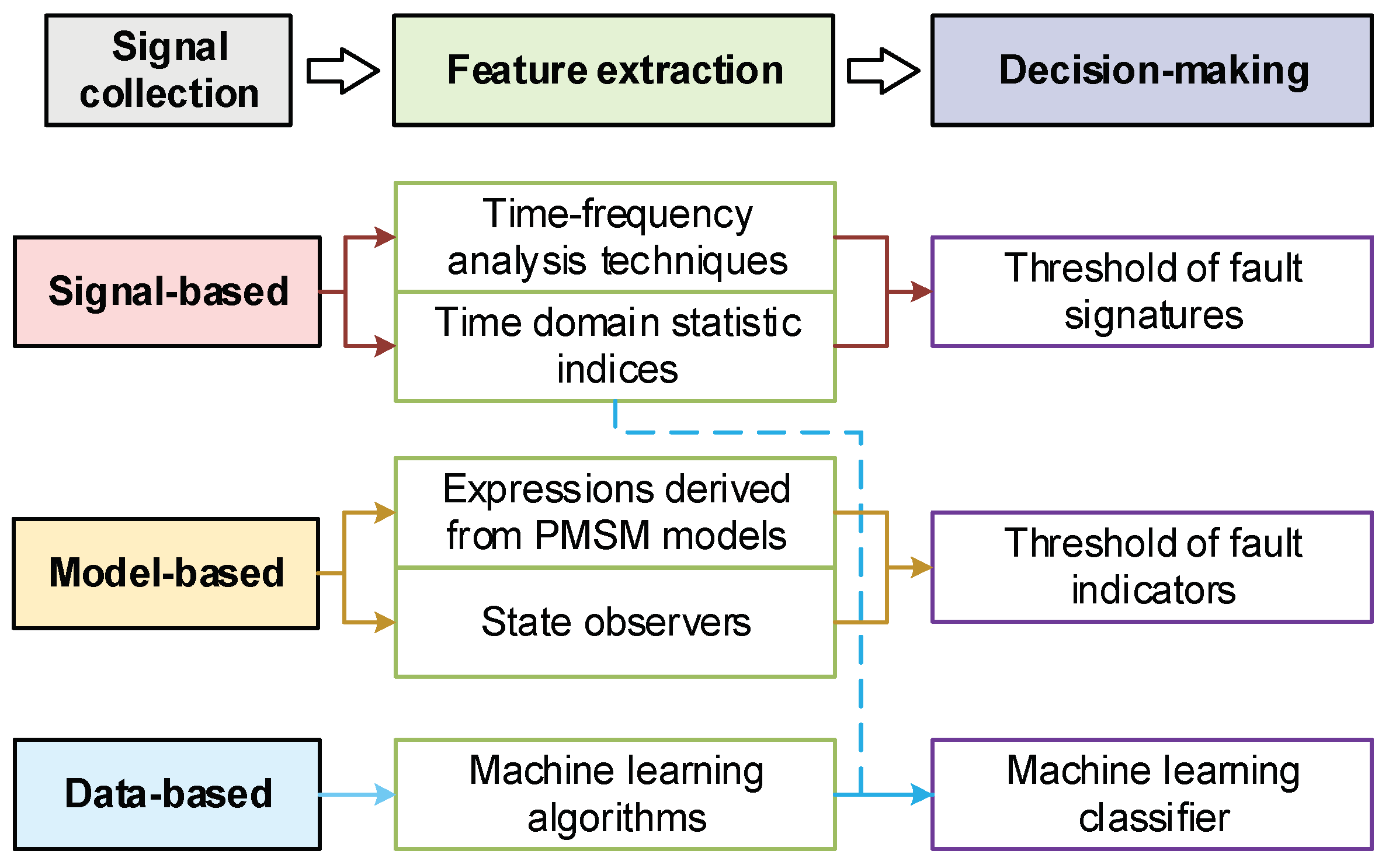
Nowadays, as the application of permanent magnet synchronous machines (PMSMs) and drive systems becomes popular, the reliability issue of PMSMs gains more and more attention. To improve the reliability of PMSMs, fault detection is one of the practical techniques, which enables early interference and mitigation to the faults, and subsequently reduce the impact of the faults. In this paper, the state-of-art fault detection methods of PMSMs are systematically reviewed. Three typical faults, i.e., the inter-turn short-circuit fault, the PM partial demagnetization fault, and the eccentricity fault are included. The existing methods are firstly classified into signal-, model-, and data-based methods, while the focus of this paper is laid on the signal sources and the signatures utilized in these methods. Based on this perspective, this paper intends to provide a new insight into the inherent commonalities and differences among these detection methods, and thus, inspire further innovation. Furthermore, comparison is conducted between methods based on different signatures. Finally, some issues in existing methods are discussed, and the future work is highlighted.
Keywords:
1. Introduction
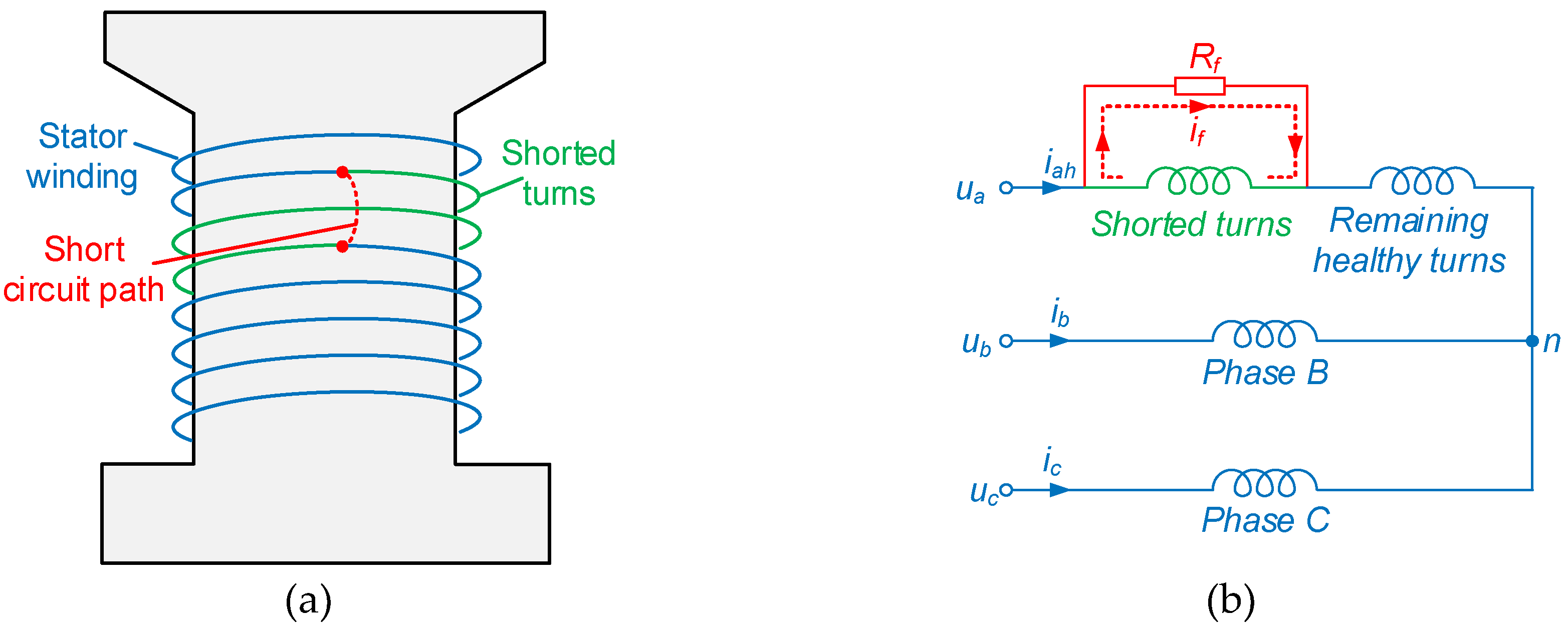
2. Inter-Turn Short-Circuit Fault Detection
2.1. Background
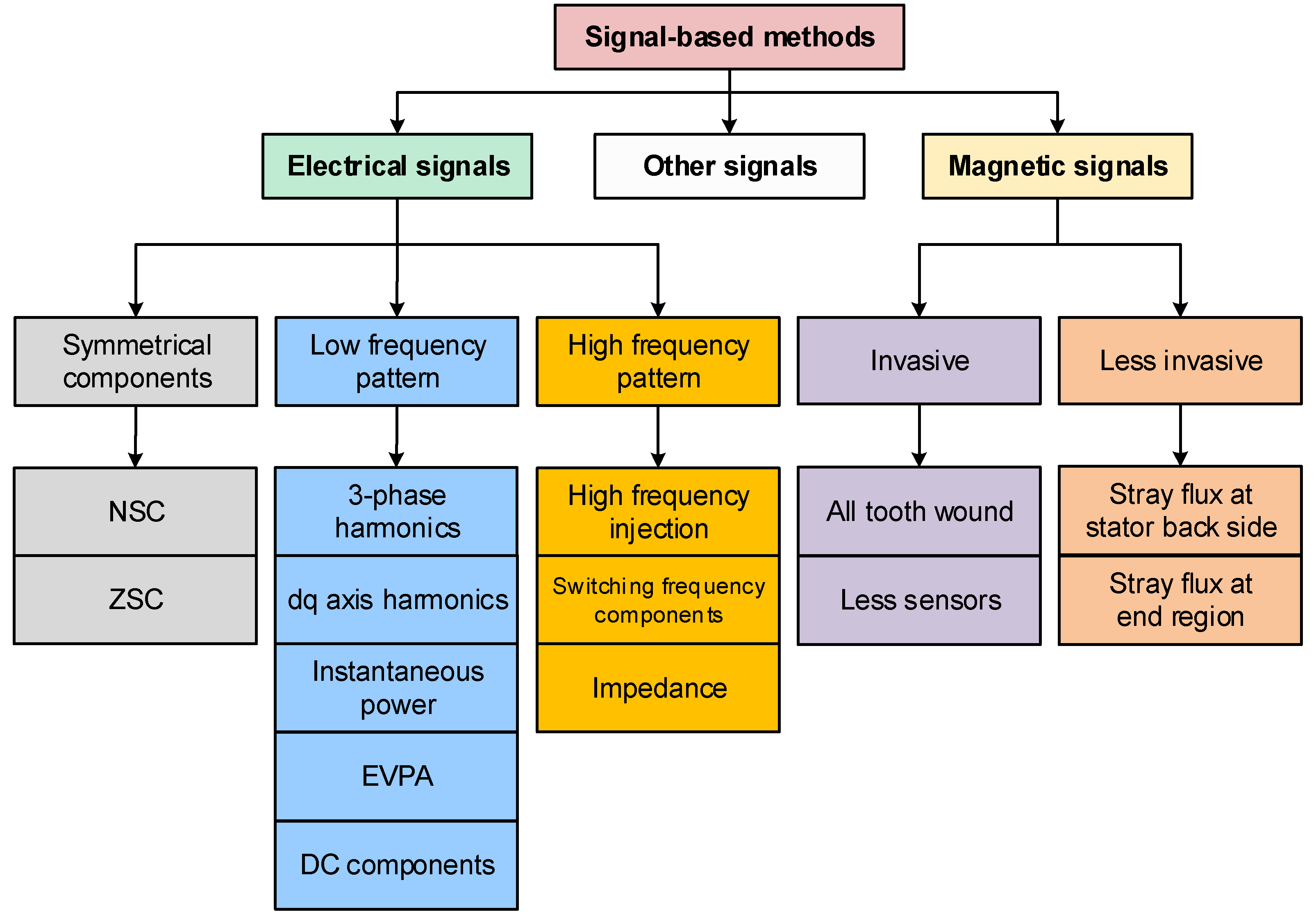
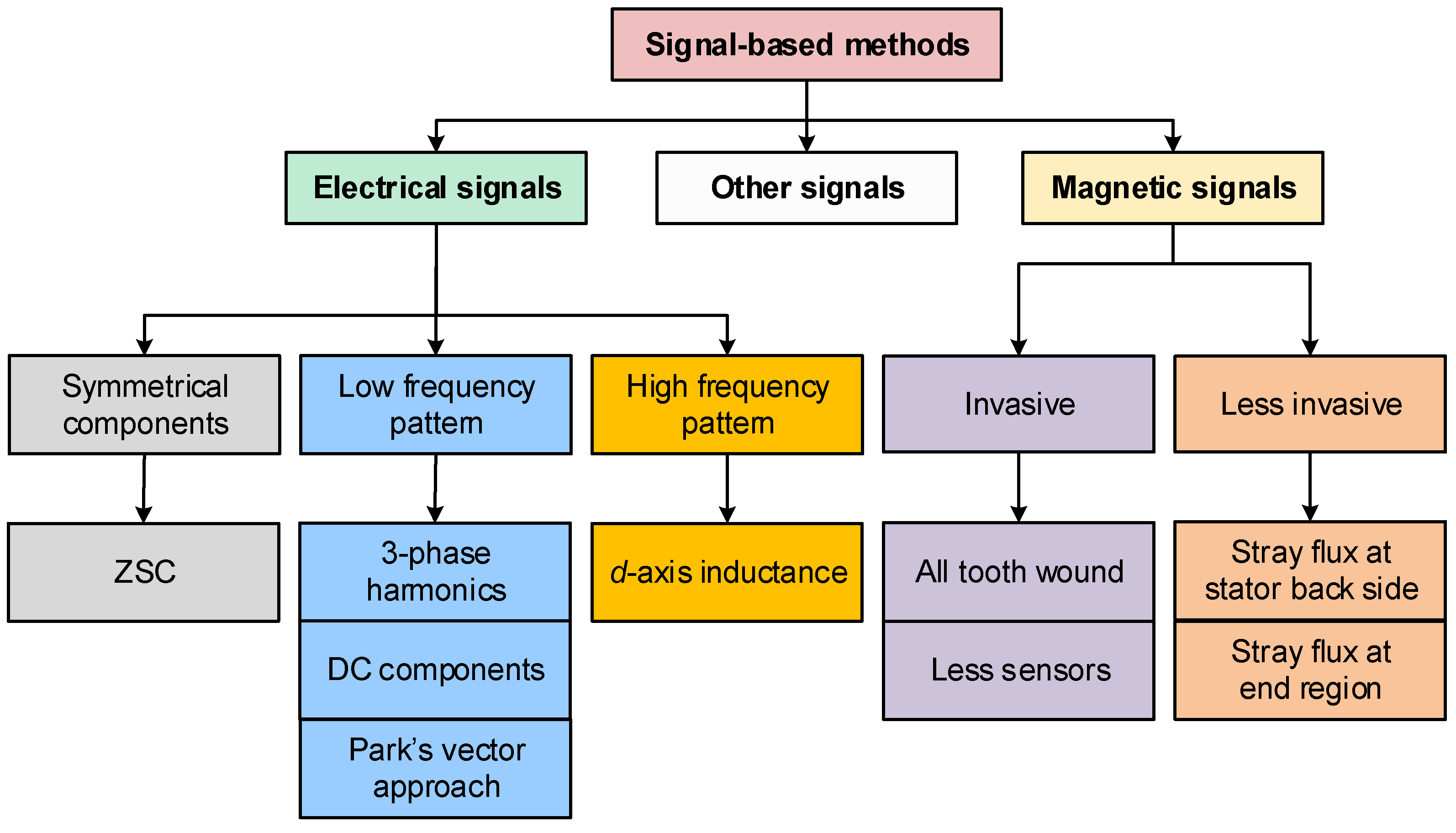
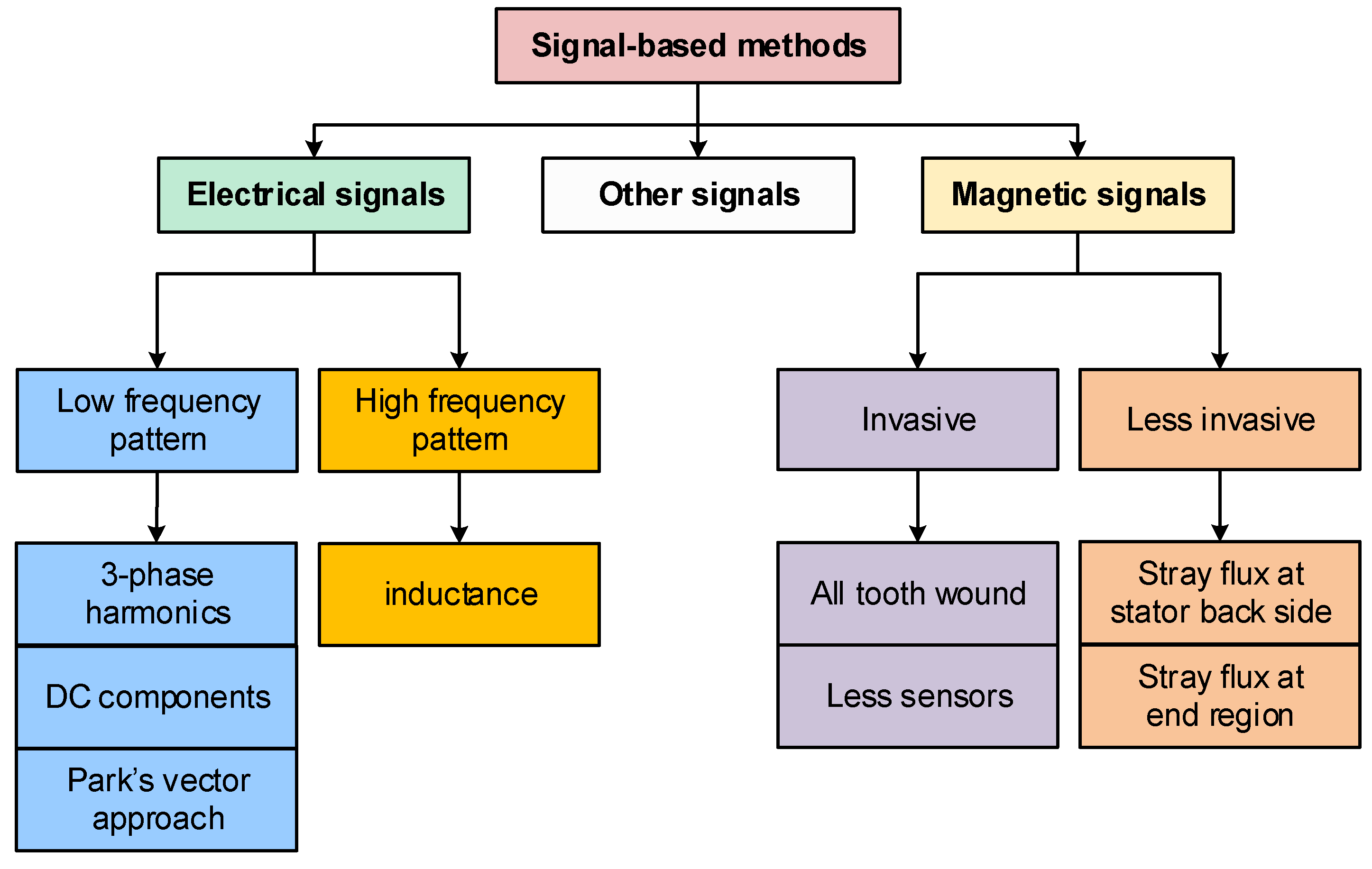
2.2. Signal-Based Methods
2.2.1. Electrical Signals
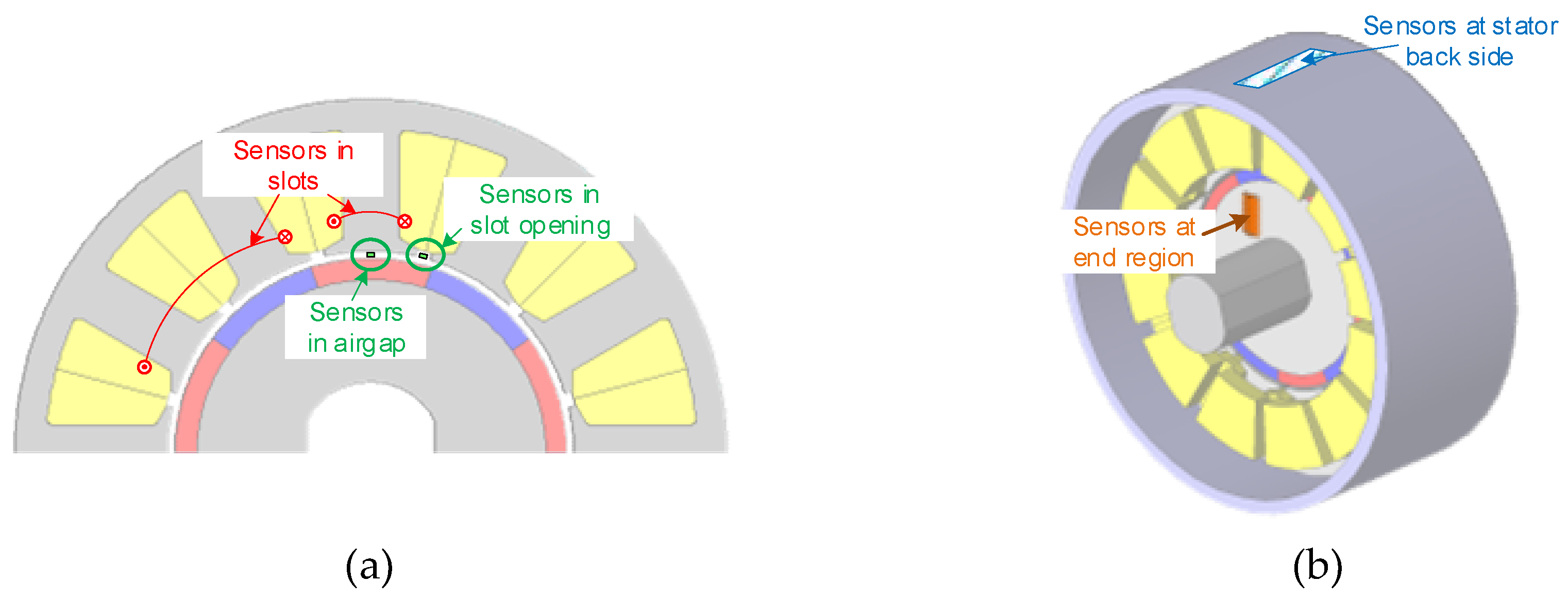
2.2.2. Magnetic Signals
2.2.3. Other Signals
2.2.4. Comparison
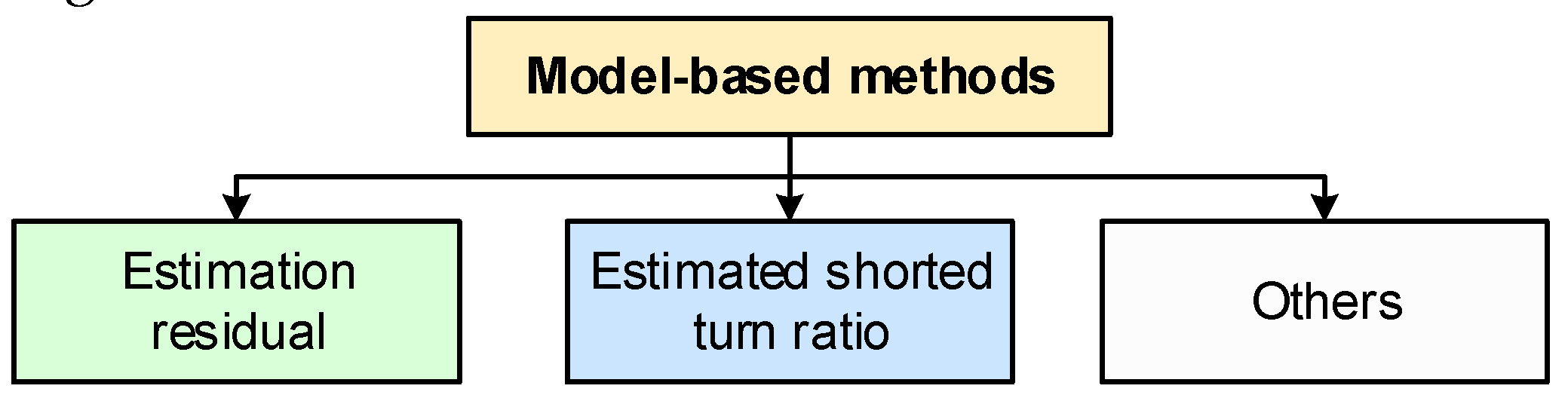
2.3. Model-Based Methods
2.3.1. Estimation Residual
2.3.2. Estimated Shorted Turn Ratio
2.3.3. Others
2.3.4. Comparison
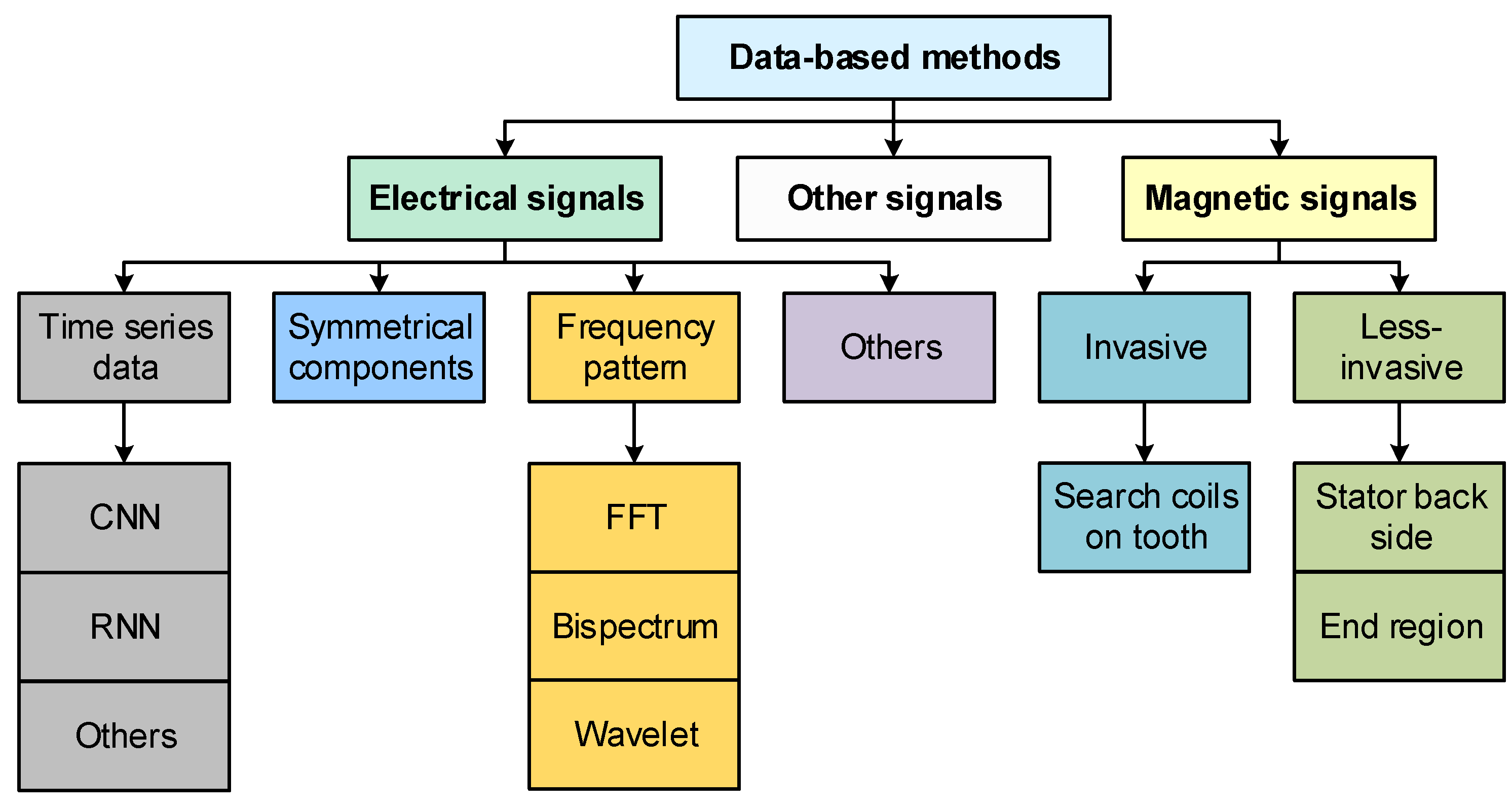
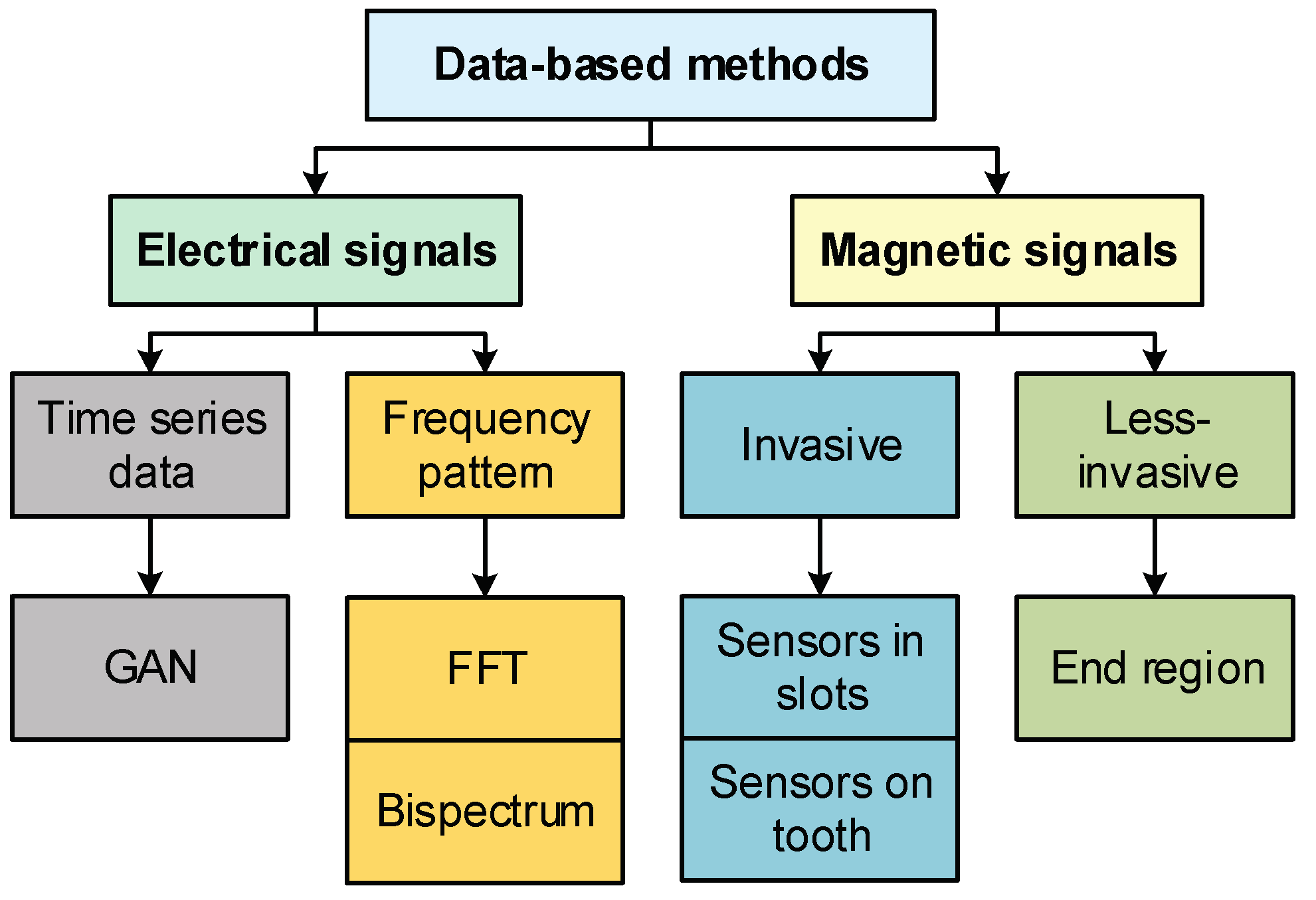
2.4. Data-Based Methods
2.4.1. Electrical Signals
2.4.2. Magnetic Signals
2.4.3. Other Signals
2.4.4. Comparison
3. Partial Demagnetization Detection
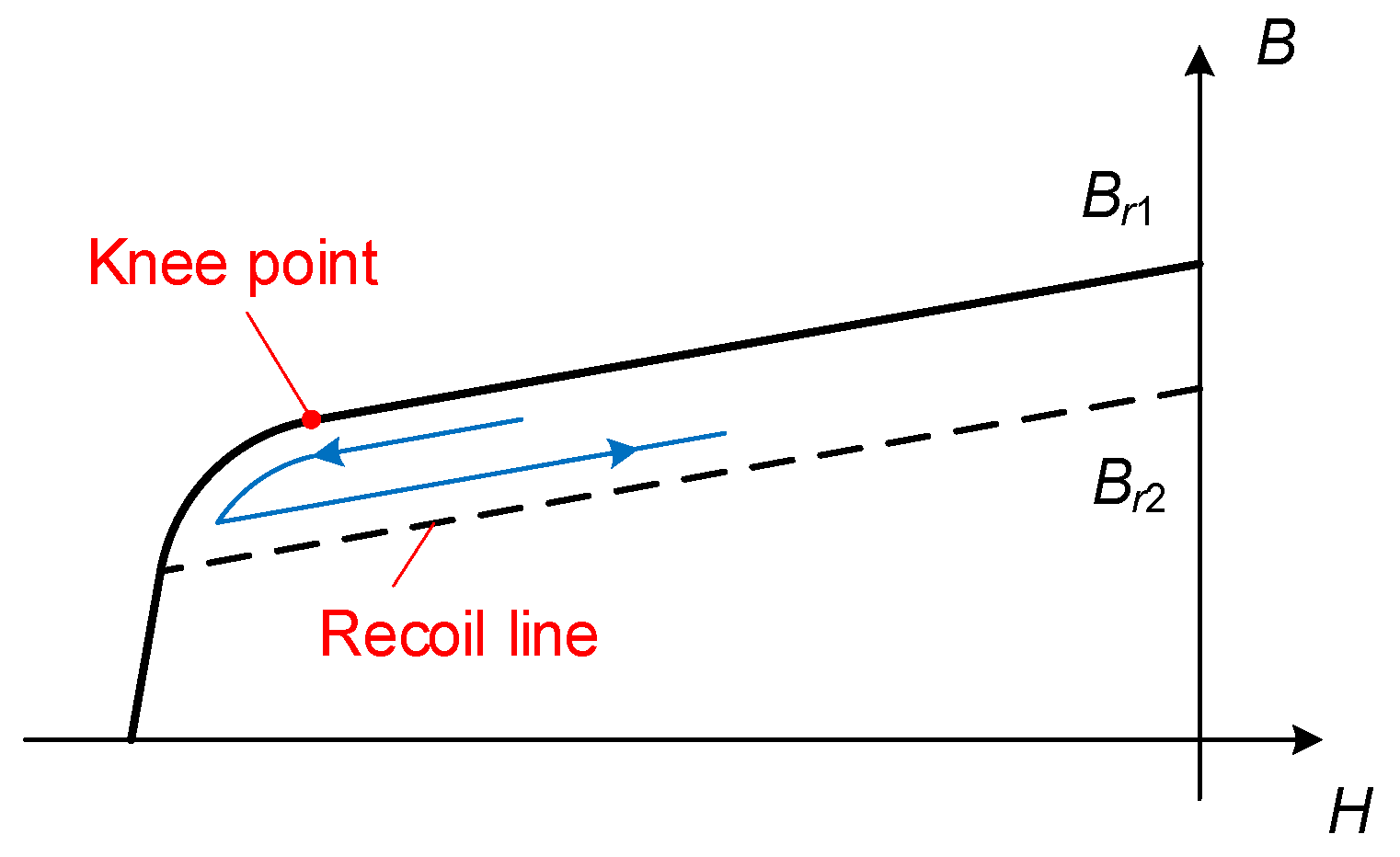
3.1. Background
3.2. Signal-Based Methods
3.2.1. Electrical Signals
3.2.2. Magnetic Signals
3.2.3. Other Signals
3.2.4. Comparison
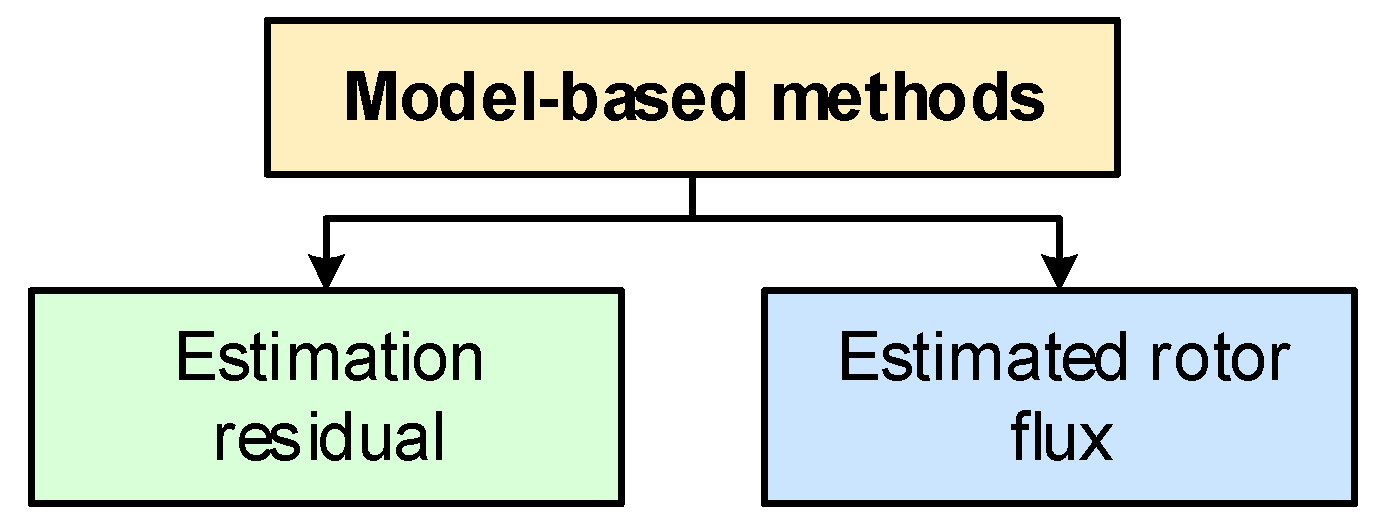
3.3. Model-Based Methods
3.3.1. Estimation Residual
3.3.2. Estimated Rotor Flux
3.3.3. Comparison
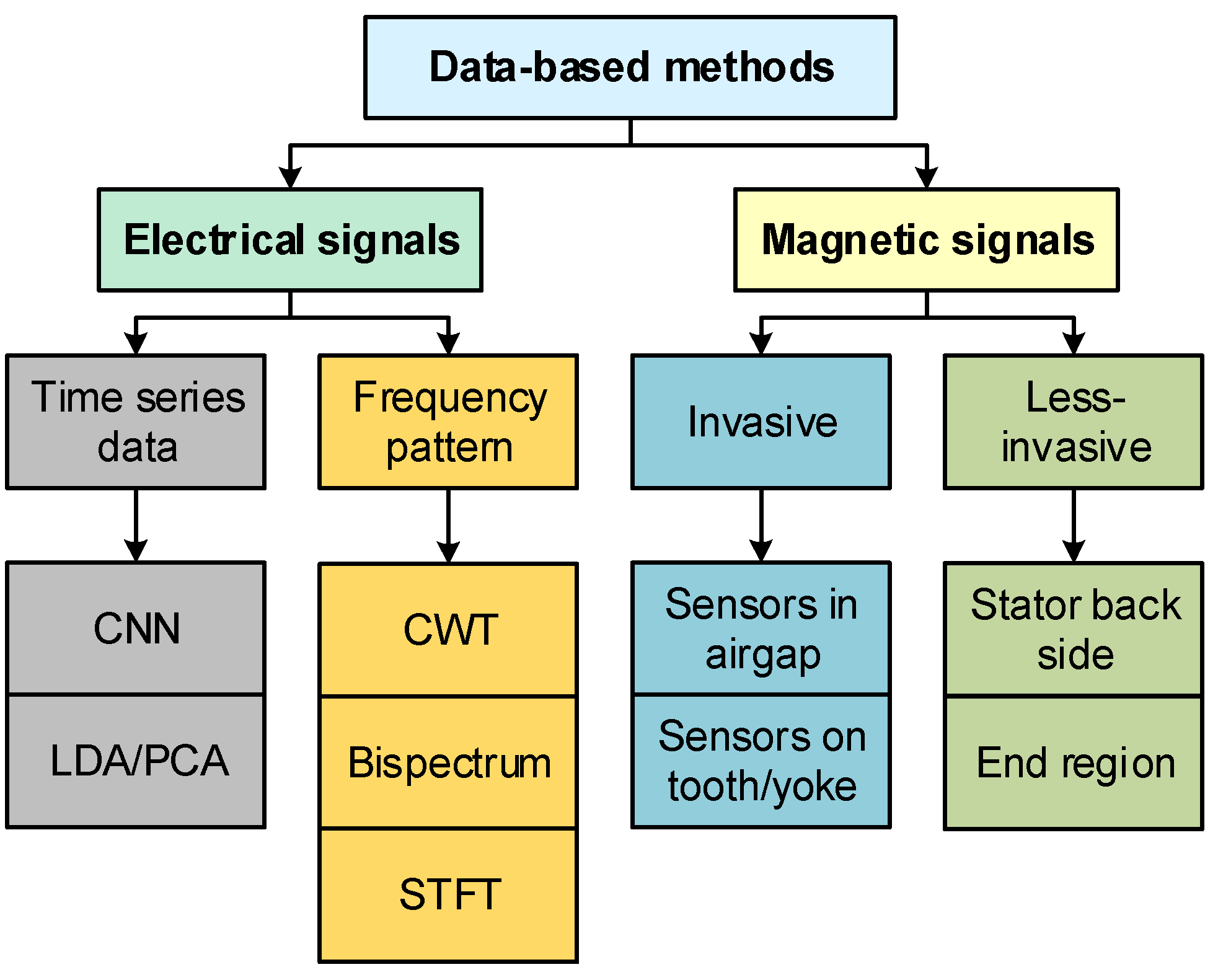
3.4. Data-Based Methods
3.4.1. Electrical Signals
3.4.2. Magnetic Signals
3.4.3. Comparison
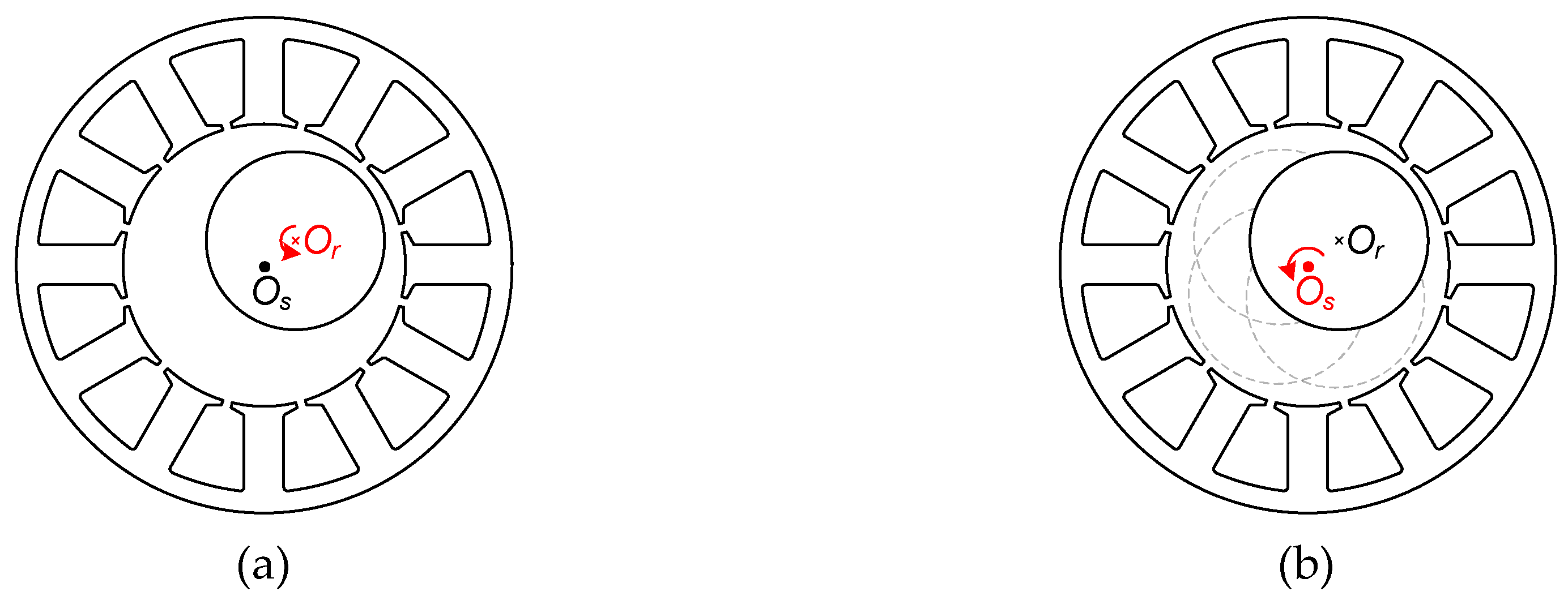
4. Eccentricity Detection
4.1. Background
4.2. Signal-Based Methods
4.2.1. Electrical Signals
4.2.2. Magnetic Signals
4.2.3. Other Signals
4.2.4. Comparison
4.3. Model-Based Methods
4.4. Data-Based Methods
4.4.1. Electrical Signals
4.4.2. Magnetic Signals
4.4.3. Comparison
5. Discussion of Detection of Three Types of Faults
5.1. Signal-Based Methods
5.2. Model-Based Methods
5.3. Data-Based Methods
6. Conclusion and Future Work
- (1)
- Improving the capability of distinguishing different faults. It has been widely investigated how to distinguish different faults, while very few methods with good universality are developed.
- (2)
- Reduction in the number of sensors. Much effort has been made to reduce the number of sensors used for magnetic signal and ZSVC collection. Further investigation can follow this direction and try to find a balance point between the detection capability and complexity.
- (3)
- Detection of faults in DTPPMSM. Compared with traditional three phase PMSM, DTPPMSM has more control degrees, and also more sampled current signals. Thus, potentially higher SNR can be achieved.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Acronyms
| AI | Artificial intelligence |
| ANN | Artificial neural network |
| BLDC | Brushless DC |
| CNN | Convolutional neural network |
| CWT | Continuous wavelet transform |
| DE | Dynamic eccentricity |
| DTPPMSM | Dual-three-phase PMSM |
| DWT | Discrete wavelet transform |
| EMD | Empirical mode decomposition |
| EMF | Electromotive force |
| EPVA | Extended Park’s vector approach |
| FEM | Finite element method |
| FFT | Fast Fourier transform |
| GAN | Generative adversarial network |
| HF | High frequency |
| HRC | High resistance connection |
| IPMSM | Interior PMSM |
| IRP | Instantaneous reactive power |
| ITSC | Inter-turn short-circuit |
| KNN | K-Nearest Neighbor |
| LF | Low frequency |
| LUT | Look-up table |
| MCSA | Machine current signature analysis |
| ME | Mixed eccentricity |
| MMF | Magnetomotive force |
| NSC | Negative sequence component |
| PD | Partial demagnetization |
| PLL | Phase lock loop |
| PM | Permanent magnet |
| PMSG | PM synchronous generator |
| PMSM | PM synchronous machine |
| PSC | Positive sequence component |
| PVA | Park’s vector approach |
| PWM | Pulse width modulation |
| RMS | Root mean square |
| RNN | Recurrent neural network |
| SE | Static eccentricity |
| SNR | Signal-to-noise ratio |
| SPMSM | Surface-mounted PMSM |
| STFT | Short-time Fourier transform |
| SVPWM | Space vector PWM |
| TMR | Tunnelling magneto-resistive |
| UD | Uniform demagnetization |
| UMP | Unbalanced magnetic pull |
| VMD | Variational mode decomposition |
| ZSC | Zero sequence component |
| ZSVC | Zero sequence voltage component |
References
- Zhu, Z.Q.; Howe, D. Electrical Machines and Drives for Electric, Hybrid, and Fuel Cell Vehicles. Proc. IEEE 2007, 95, 746–765. [Google Scholar] [CrossRef]
- Zhang, P.; Du, Y.; Habetler, T.G.; Lu, B. A Survey of Condition Monitoring and Protection Methods for Medium-Voltage Induction Motors. IEEE Trans. Ind. Appl. 2011, 47, 34–46. [Google Scholar] [CrossRef]
- Orlowska-Kowalska, T.; Wolkiewicz, M.; Pietrzak, P.; Skowron, M.; Ewert, P.; Tarchala, G.; Krzysztofiak, M.; Kowalski, C.T. Fault Diagnosis and Fault-Tolerant Control of PMSM Drives–State of the Art and Future Challenges. IEEE Access 2022, 10, 59979–60024. [Google Scholar] [CrossRef]
- Pengbo, Z.; Renxiang, C.; Xiangyang, X.; Lixia, Y.; Mengyu, R. Recent Progress and Prospective Evaluation of Fault Diagnosis Strategies for Electrified Drive Powertrains: A Comprehensive Review. Measurement 2023, 222, 113711. [Google Scholar] [CrossRef]
- Jiang, Y.; Ji, B.; Zhang, J.; Yan, J.; Li, W. An Overview of Diagnosis Methods of Stator Winding Inter-Turn Short Faults in Permanent-Magnet Synchronous Motors for Electric Vehicles. WEVJ 2024, 15, 165. [Google Scholar] [CrossRef]
- Faiz, J.; Bazrafshan, M.A.; Tabarniarami, Z. Demagnetisation Fault Analysis and Diagnosis Based on Different Methods in Permanent Magnet Machines-An Overview. IET Electric Power Applications 2024. [Google Scholar] [CrossRef]
- Faiz, J.; Nejadi-Koti, H. Eccentricity Fault Diagnosis Indices for Permanent Magnet Machines: State-of-the-art. IET Electric Power Applications 2019, 13, 1241–1254. [Google Scholar] [CrossRef]
- Solís, R.; Torres, L.; Pérez, P. Review of Methods for Diagnosing Faults in the Stators of BLDC Motors. Processes 2022, 11. [Google Scholar] [CrossRef]
- Grubic, S.; Aller, J.M.; Bin, L.; Habetler, T.G. A Survey on Testing and Monitoring Methods for Stator Insulation Systems of Low-Voltage Induction Machines Focusing on Turn Insulation Problems. IEEE Trans. Ind. Electron. 2008, 55, 4127–4136. [Google Scholar] [CrossRef]
- Hang, J.; Zhang, J.; Cheng, M.; Huang, J. Online Interturn Fault Diagnosis of Permanent Magnet Synchronous Machine Using Zero-Sequence Components. IEEE Trans. Power Electron. 2015, 30, 6731–6741. [Google Scholar] [CrossRef]
- Zhu, Y.; Cai, S.; Li, B. Detection and Discrimination of Interturn Fault and High-Resistance Connection Fault in PMSM Based on Deviation Angle of Zero Sequence Voltage. IEEE Trans. Transp. Electrific. 2024, 10, 7623–7632. [Google Scholar] [CrossRef]
- Hang, J.; Ding, S.; Ren, X.; Hu, Q.; Huang, Y.; Hua, W.; Wang, Q. Integration of Interturn Fault Diagnosis and Torque Ripple Minimization Control for Direct-Torque-Controlled SPMSM Drive System. IEEE Trans. Power Electron. 2021, 36, 11124–11134. [Google Scholar] [CrossRef]
- Hang, J.; Sun, W.; Hu, Q.; Ren, X.; Ding, S. Integration of Interturn Fault Diagnosis and Fault-Tolerant Control for PMSM Drive System. IEEE Trans. Transp. Electrif. 2022, 8, 2825–2835. [Google Scholar] [CrossRef]
- Wang, H.; Wang, J.; Wang, X.; Lu, S.; Hu, C.; Cao, W. Detection and Evaluation of the Interturn Short Circuit Fault in a BLDC-Based Hub Motor. IEEE Trans. Ind. Electron. 2023, 70, 3055–3068. [Google Scholar] [CrossRef]
- Laadjal, K.; Antunes, H.R.P.; Sahraoui, M.; Bento, F.; Marques Cardoso, A.J. On-Line Diagnosis and Discrimination of Stator Faults in Six-Phase Induction Motors, Based on Voltage Symmetrical Components. IEEE Trans. Transp. Electrif. 2022, 1–1. [Google Scholar] [CrossRef]
- Laadjal, K.; Bento, F.; Serra, J.; Cardoso, A.J.M. An Integrated Strategy for the Real-Time Detection and Discrimination of Stator Inter-Turn Short-Circuits and Converter Faults in Asymmetrical Six-Phase Induction Motors. IEEE Trans. on Ind. Applicat. 2023, 1–10. [Google Scholar] [CrossRef]
- Alloui, A.; Laadjal, K.; Sahraoui, M.; Marques Cardoso, A.J. Online Interturn Short-Circuit Fault Diagnosis in Induction Motors Operating Under Unbalanced Supply Voltage and Load Variations, Using the STLSP Technique. IEEE Trans. Ind. Electron. 2023, 70, 3080–3089. [Google Scholar] [CrossRef]
- Wu, Y.; Zhang, J.; Xu, Z.; Wang, S.; Fu, H. Feature Extraction and Applicability Comparisons for Fault Detection of Inter-Turn Short-Circuited PMSM. IEEE Trans. Instrum. Meas. 2024, 73, 1–10. [Google Scholar] [CrossRef]
- Williamson, S.; Mirzoian, K. Analysis of Cage Induction Motors with Stator Winding Faults. IEEE Trans. on Power Apparatus and Syst. 1985, PAS-104, 1838–1842. [Google Scholar] [CrossRef]
- Jeong, H.; Moon, S.; Kim, S.W. An Early Stage Interturn Fault Diagnosis of PMSMs by Using Negative-Sequence Components. IEEE Trans. Ind. Electron. 2017, 64, 5701–5708. [Google Scholar] [CrossRef]
- Dorrell, D.G.; Makhoba, K. Detection of Inter-Turn Stator Faults in Induction Motors Using Short-Term Averaging of Forward and Backward Rotating Stator Current Phasors for Fast Prognostics. IEEE Trans. Magn. 2017, 53, 1–7. [Google Scholar] [CrossRef]
- Ge, Y.; Song, B.; Pei, Y.; Mollet, Y.A.B.; Gyselinck, J.J.C. Analytical Expressions of Isolation Indicators for Permanent-Magnet Synchronous Machines under Stator Short-Circuit Faults. IEEE Trans. Energy Convers. 2019, 34, 984–992. [Google Scholar] [CrossRef]
- Bahloul, I.; Bouzid, M.B.K.; Khil, S.K.E.; Champenois, G. Robust Novel Indicator to Distinguish between an Inter-Turn Short Circuit Fault and Load Unbalance in PMSG. IEEE Trans. Ind. Appl. 2023, 1–9. [Google Scholar] [CrossRef]
- Laadjal, K.; Bento, F.; Henriques, K.; Marques Cardoso, A.J.; Sahraoui, M. A Novel Indicator-Based on-Line Diagnostics Technique of Inter-Turn Short-Circuit Faults in Synchronous Reluctance Machines. IEEE J. Emerg. Sel. Top. Power Electron. 2023, 1–1. [Google Scholar] [CrossRef]
- Naderi, P.; Fathi, A. Fault Diagnosis/Separation of Surface Mounted Permanent Magnet Synchronous Machine by Current and Its Homopolar Orders Analysis. IEEE Trans. Energy Convers. 2022, 1–11. [Google Scholar] [CrossRef]
- Park, J.-K.; Hur, J. Detection of Inter-Turn and Dynamic Eccentricity Faults Using Stator Current Frequency Pattern in IPM-Type BLDC Motors. IEEE Trans. Ind. Electron. 2016, 63, 1771–1780. [Google Scholar] [CrossRef]
- Lee, S.-T.; Hur, J. Detection Technique for Stator Inter-Turn Faults in BLDC Motors Based on Third-Harmonic Components of Line Currents. IEEE Trans. Ind. Appl. 2017, 53, 143–150. [Google Scholar] [CrossRef]
- Wang, B.; Wang, J.; Griffo, A.; Sen, B. Stator Turn Fault Detection by Second Harmonic in Instantaneous Power for a Triple-Redundant Fault-Tolerant PM Drive. IEEE Trans. Ind. Electron. 2018, 65, 7279–7289. [Google Scholar] [CrossRef]
- Duan, R.; Wu, L.; Lyu, Z.; Zhan, H.; Song, P. Harmonic Subspace Signature-Based Detection and Localization of Inter-Turn Short Circuit Fault for Dual Three-Phase PMSM with VSD Scheme. IEEE Trans. Transp. Electrific. 2024, 1–1. [Google Scholar] [CrossRef]
- Huang, S.; Aggarwal, A.; Strangas, E.G.; Li, K.; Niu, F.; Huang, X. Robust Stator Winding Fault Detection in PMSMs with Respect to Current Controller Bandwidth. IEEE Trans. Power Electron. 2021, 36, 5032–5042. [Google Scholar] [CrossRef]
- Rosero, J.A.; Romeral, L.; Ortega, J.A.; Rosero, E. Short-Circuit Detection by Means of Empirical Mode Decomposition and Wigner–Ville Distribution for PMSM Running under Dynamic Condition. IEEE Trans. Ind. Electron. 2009, 56, 4534–4547. [Google Scholar] [CrossRef]
- Dogan, Z.; Tetik, K. Diagnosis of Inter-Turn Faults Based on Fault Harmonic Component Tracking in LSPMSMs Working under Nonstationary Conditions. IEEE Access 2021, 9, 92101–92112. [Google Scholar] [CrossRef]
- Chen, C.-S.; Lin, C.-J.; Yang, F.-J.; Lin, F.-C. Model Design of Inter-Turn Short Circuits in Internal Permanent Magnet Synchronous Motors and Application of Wavelet Transform for Fault Diagnosis. Applied Sciences 2024, 14, 9570. [Google Scholar] [CrossRef]
- Boileau, T.; Leboeuf, N.; Nahid-Mobarakeh, B.; Meibody-Tabar, F. Synchronous Demodulation of Control Voltages for Stator Interturn Fault Detection in PMSM. IEEE Trans. Power Electron. 2013, 28, 5647–5654. [Google Scholar] [CrossRef]
- Bellini, A.; Filippetti, F.; Franceschini, G.; Tassoni, C. Closed-Loop Control Impact on the Diagnosis of Induction Motors Faults. IEEE Trans. on Ind. Applicat. 2000, 36, 1318–1329. [Google Scholar] [CrossRef]
- Wei, D.; Liu, K.; Hu, W.; Peng, X.; Chen, Y.; Ding, R. Short-Time Adaline Based Fault Feature Extraction for Inter-Turn Short Circuit Diagnosis of PMSM via Residual Insulation Monitoring. IEEE Trans. Ind. Electron. 2023, 70, 3103–3114. [Google Scholar] [CrossRef]
- Wei, D.; Liu, K.; Huang, J.; Wang, J.; Zhou, S.; Cai, H.; Chen, J. Instantaneous Phase Estimation Based Single-Signal Diagnosis for Inter-Turn Short Circuit Fault in PMSMs. IEEE Trans. Energy Convers. 2024, 1–15. [Google Scholar] [CrossRef]
- Ghods, M.; Tabarniarami, Z.; Faiz, J.; Bazrafshan, M.A. Turn-to-Turn and Phase-to-Phase Short Circuit Fault Detection of Wind Turbine Permanent Magnet Generator Based on Equivalent Magnetic Network Modelling by Wavelet Transform Approach. IET Electric Power Applications 2024, 18, 1005–1020. [Google Scholar] [CrossRef]
- Niu, F.; Xu, M.; Zhou, F.; Huang, S.; Xu, Z.; Zhang, L.; Aggarwal, A. Accurate Interturn Short-Circuit Faults Diagnosis in PMSMs under Variable Operating Conditions by Signal Compensation. IEEE Trans. Power Electron. 2024, 1–13. [Google Scholar] [CrossRef]
- Fonseca, D.S.B.; Santos, C.M.C.; Cardoso, A.J.M. Stator Faults Modeling and Diagnostics of Line-Start Permanent Magnet Synchronous Motors. IEEE Trans. Ind. Appl. 2020, 56, 2590–2599. [Google Scholar] [CrossRef]
- Qiao, J.; Yin, X.; Wang, Y.; Lu, Q.; Tan, L.; Zhu, L. A Stator Internal Short-Circuit Fault Protection Method for Turbo-Generator Based on Instantaneous Power Oscillation Ratio. IEEE Trans. Energy Convers. 2023, 1–9. [Google Scholar] [CrossRef]
- Haddad, R.Z.; Lopez, C.A.; Foster, S.N.; Strangas, E.G. A Voltage-Based Approach for Fault Detection and Separation in Permanent Magnet Synchronous Machines. IEEE Trans. Ind. Appl. 2017, 53, 5305–5314. [Google Scholar] [CrossRef]
- Moon, S.; Jeong, H.; Lee, H.; Kim, S.W. Detection and Classification of Demagnetization and Interturn Short Faults of IPMSMs. IEEE Trans. Ind. Electron. 2017, 64, 9433–9441. [Google Scholar] [CrossRef]
- Ullah, Z.; Lee, S.-T.; Hur, J. A Torque Angle-Based Fault Detection and Identification Technique for IPMSM. IEEE Trans. Ind. Appl. 2020, 56, 170–182. [Google Scholar] [CrossRef]
- Tabarniarami, Z.; Ghods, M.; Faiz, J.; Abedini, M. Online Diagnosis of Short Circuit Faults of Permanent Magnet Synchronous Generator by Short-Time Analysis of the Three Phase Amplitude-Phase Signal Based on Analytical Modeling. IEEE Trans. Transp. Electrific. 2024, 1–1. [Google Scholar] [CrossRef]
- Hang, J.; Wang, X.; Li, W.; Ding, S. Interturn Short-Circuit Fault Diagnosis and Fault-Tolerant Control of DTP-PMSM Based on Subspace Current Residuals. IEEE Trans. Power Electron. 2024, 1–9. [Google Scholar] [CrossRef]
- Wang, H.; Hu, J.; Li, Y. Fault Phase Location for Interturn Short Circuit Faults in Symmetrical Six-Phase PMSMs Based on Subspace Current Residual. IEEE Trans. Transp. Electrific. 2024, 1–1. [Google Scholar] [CrossRef]
- Hu, J.; Wang, H.; Li, Y. Model-Based Severity Monitoring for Interturn Short Circuit Faults in Symmetrical Six-Phase PMSMs Using Subspace Current Residuals. IEEE Trans. Power Electron. 2023, 38, 16142–16152. [Google Scholar] [CrossRef]
- Sen, B.; Wang, J. Stator Interturn Fault Detection in Permanent-Magnet Machines Using PWM Ripple Current Measurement. IEEE Trans. Ind. Electron. 2016, 63, 3148–3157. [Google Scholar] [CrossRef]
- Wang, B.; Hu, J.; Wang, G.; Hua, W. A Novel Stator Turn Fault Detection Technique by Using Equivalent High Frequency Impedance. IEEE Access 2020, 8, 130540–130550. [Google Scholar] [CrossRef]
- Hu, R.; Wang, J.; Sen, B.; Mills, A.R.; Chong, E.; Sun, Z. PWM Ripple Currents Based Turn Fault Detection for Multiphase Permanent Magnet Machines. IEEE Trans. Ind. Appl. 2017, 53, 2740–2751. [Google Scholar] [CrossRef]
- Hu, R.; Wang, J.; Mills, A.; Chong, E.; Sun, Z. Detection and Classification of Turn Fault and High-resistance Connection Fault in Inverter-fed Permanent Magnet Machines Based on High-frequency Signals. J. Eng. 2019, 2019, 4278–4282. [Google Scholar] [CrossRef]
- Hu, R.; Wang, J.; Mills, A.R.; Chong, E.; Sun, Z. Detection and Classification of Turn Fault and High Resistance Connection Fault in Permanent Magnet Machines Based on Zero Sequence Voltage. IEEE Trans. Power Electron. 2020, 35, 1922–1933. [Google Scholar] [CrossRef]
- Gao, F.; Zhang, G.; Li, M.; Gao, Y.; Zhuang, S. Inter-Turn Fault Identification of Surface-Mounted Permanent Magnet Synchronous Motor Based on Inverter Harmonics. Energies 2020, 13. [Google Scholar] [CrossRef]
- Wang, B.; Luo, L.; Fu, W.; Hua, W.; Wang, G.; Wang, Z. Study on the PWM Ripple Current Based Turn Fault Detection for Interior PM Machine. IEEE Trans. Transp. Electrif. 2021, 7, 1537–1547. [Google Scholar] [CrossRef]
- Zhang, J.; Xu, Z.; Wang, J.; Zhao, J.; Din, Z.; Cheng, M. Detection and Discrimination of Incipient Stator Faults for Inverter-Fed Permanent Magnet Synchronous Machines. IEEE Trans. Ind. Electron. 2021, 68, 7505–7515. [Google Scholar] [CrossRef]
- Xu, Z.; Zhang, J.; Zhang, Y.; Zhao, J. Winding Condition Monitoring for Inverter-Fed PMSM Using High-Frequency Current Injection. IEEE Trans. Ind. Appl. 2021, 57, 5818–5828. [Google Scholar] [CrossRef]
- Hu, R.; Wang, J.; Mills, A.R.; Chong, E.; Sun, Z. High-Frequency Voltage Injection Based Stator Interturn Fault Detection in Permanent Magnet Machines. IEEE Trans. Power Electron. 2021, 36, 785–794. [Google Scholar] [CrossRef]
- Wang, H.; Wu, Z.; Zhou, F.; Cao, W.; Hu, C.; Lu, S. Diagnosis of Interturn Short Circuit Fault in BLDCM Based on Coupled High-Frequency Signal Injection. IEEE Trans. Instrum. Meas. 2024, 73, 1–10. [Google Scholar] [CrossRef]
- Xu, Z.; Zhang, J.; Cheng, M. Investigation of Signal Injection Methods for Fault Detection of PMSM Drives. IEEE Trans. Energy Convers. 2022, 1–1. [Google Scholar] [CrossRef]
- Xu, Z.; Zhang, J.; Xiong, J.; Wu, Y.; Cheng, M. An Improved High Frequency Voltage Injection Method for Inter-Turn Short-Circuit Fault Detection in PMSMs. IEEE Trans. Transp. Electrif. 2022, 1–1. [Google Scholar] [CrossRef]
- Fang, X.; Gao, J.; Lu, J.; Zhang, J.; Li, H. Early Fault Detection of Stator Inter-Turn Short Circuit of Asynchronous Motor Based on Rotating High Frequency Voltage Injection. IEEE Trans. Transp. Electrific. 2024, 1–1. [Google Scholar] [CrossRef]
- Qi, Y.; Zafarani, M.; Akin, B.; Fedigan, S.E. Analysis and Detection of Inter-Turn Short-Circuit Fault through Extended Self-Commissioning. IEEE Trans. Ind. Appl. 2017, 53, 2730–2739. [Google Scholar] [CrossRef]
- Baruti, K.H.; Gurusamy, V.; Erturk, F.; Akin, B. A Robust and Practical Approach to Estimate the Number of Shorted Turns in PMSM with ITSC Faults. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 2839–2849. [Google Scholar] [CrossRef]
- Hang, J.; Ding, S.; Zhang, J.; Cheng, M.; Chen, W.; Wang, Q. Detection of Interturn Short-Circuit Fault for PMSM with Simple Fault Indicator. IEEE Trans. Energy Convers. 2016, 31, 1697–1699. [Google Scholar] [CrossRef]
- Haje Obeid, N.; Battiston, A.; Boileau, T.; Nahid-Mobarakeh, B. Early Intermittent Interturn Fault Detection and Localization for a Permanent Magnet Synchronous Motor of Electrical Vehicles Using Wavelet Transform. IEEE Trans. Transp. Electrif. 2017, 3, 694–702. [Google Scholar] [CrossRef]
- Hang, J.; Zhang, J.; Xia, M.; Ding, S.; Hua, W. Interturn Fault Diagnosis for Model-Predictive-Controlled-PMSM Based on Cost Function and Wavelet Transform. IEEE Trans. Power Electron. 2020, 35, 6405–6418. [Google Scholar] [CrossRef]
- Ray, D.K.; Roy, T.; Chattopadhyay, S. Skewness Scanning for Diagnosis of a Small Inter-Turn Fault in Quadcopter’s Motor Based on Motor Current Signature Analysis. IEEE Sens. J. 2021, 21, 6952–6961. [Google Scholar] [CrossRef]
- Park, C.H.; Lee, J.; Kim, H.; Suh, C.; Youn, M.; Shin, Y.; Ahn, S.-H.; Youn, B.D. Drive-Tolerant Current Residual Variance (DTCRV) for Fault Detection of a Permanent Magnet Synchronous Motor under Operational Speed and Load Torque Conditions. IEEE Access 2021, 9, 49055–49068. [Google Scholar] [CrossRef]
- Jafari, A.; Faiz, J.; Jarrahi, M.A. A Simple and Efficient Current-Based Method for Interturn Fault Detection in BLDC Motors. IEEE Trans. Ind. Inform. 2021, 17, 2707–2715. [Google Scholar] [CrossRef]
- Da, Y.; Shi, X.; Krishnamurthy, M. A New Approach to Fault Diagnostics for Permanent Magnet Synchronous Machines Using Electromagnetic Signature Analysis. IEEE Trans. Power Electron. 2013, 28, 4104–4112. [Google Scholar] [CrossRef]
- Huang, W.; Du, B.; Li, T.; Sun, Y.; Cheng, Y.; Cui, S. Interturn Short-Circuit Fault Diagnosis of Interior Permanent Magnet Synchronous Motor for Electric Vehicle Based on Search Coil. IEEE Trans. Power Electron. 2023, 38, 2506–2515. [Google Scholar] [CrossRef]
- Gao, C.; Miao, Z.; Sang, X.; Xu, X.; Si, J.; Alkahtani, M. A Multi-Faults Online Detection and Identification Method for Concentrated Winding PMSM Using Search Coil Array. IEEE Trans. Transp. Electrific. 2024, 1–1. [Google Scholar] [CrossRef]
- Mühlthaler, J.; Lehner, B.; Reeh, A. Detection of Inter-Turn Short-Circuits in Permanent Magnet Machines Based on Rogowski & Search Coil Based Monitoring. In Proceedings of the 2024 International Conference on Electrical Machines (ICEM); IEEE: Torino, Italy, September 1 2024; pp. 1–8. [Google Scholar]
- Zeng, C.; Huang, S.; Yang, Y.; Wu, D. Inter-turn Fault Diagnosis of Permanent Magnet Synchronous Machine Based on Tooth Magnetic Flux Analysis. IET Electr. Power Appl. 2018, 12, 837–844. [Google Scholar] [CrossRef]
- Li, R.; Fang, H.; Li, D.; Qu, R.; Yang, S.; Wang, R. A Search Coil Design Method of PMSM for Detection of Inter-Turn Short-Circuit Fault. IEEE Trans. Ind. Electron. 2023, 1–10. [Google Scholar] [CrossRef]
- Liu, X.; Miao, W.; Xu, Q.; Cao, L.; Liu, C.; Pong, P.W.T. Inter-Turn Short-Circuit Fault Detection Approach for Permanent Magnet Synchronous Machines through Stray Magnetic Field Sensing. IEEE Sens. J. 2019, 19, 7884–7895. [Google Scholar] [CrossRef]
- Irhoumah, M.; Pusca, R.; Lefevre, E.; Mercier, D.; Romary, R. Detection of the Stator Winding Inter-Turn Faults in Asynchronous and Synchronous Machines through the Correlation between Harmonics of the Voltage of Two Magnetic Flux Sensors. IEEE Trans. Ind. Appl. 2019, 55, 2682–2689. [Google Scholar] [CrossRef]
- Gurusamy, V.; Bostanci, E.; Li, C.; Qi, Y.; Akin, B. A Stray Magnetic Flux-Based Robust Diagnosis Method for Detection and Location of Interturn Short Circuit Fault in PMSM. IEEE Trans. Instrum. Meas. 2021, 70, 1–11. [Google Scholar] [CrossRef]
- Eldeeb, H.H.; Berzoy, A.; Mohammed, O. Stator Fault Detection on DTC-Driven IM via Magnetic Signatures Aided by 2-D FEA Co-Simulation. IEEE Trans. Magn. 2019, 55, 1–5. [Google Scholar] [CrossRef]
- Assaf, T.; Henao, H.; Capolino, G.A. Simplified Axial Flux Spectrum Method to Detect Incipient Stator Inter-Turn Short-Circuits in Induction Machine.; 2004; pp. 815–819 vol. 2.
- Lamim Filho, P.C.M.; Rabelo Baccarini, L.M.; Batista, F.B.; Araujo, A.C. Orbit Analysis from a Stray Flux Full Spectrum for Induction Machine Fault Detection. IEEE Sens. J. 2021, 21, 16152–16161. [Google Scholar] [CrossRef]
- Kumar, P.S.; Xie, L.; Halick, M.S.M.; Vaiyapuri, V. Stator End-Winding Thermal and Magnetic Sensor Arrays for Online Stator Inter-Turn Fault Detection. IEEE Sens. J. 2021, 21, 5312–5321. [Google Scholar] [CrossRef]
- Bai, W.; Zhou, X.; Wang, Y.; Zeng, Q.; Zhan, S.; Hua, X.; Bao, G. Vibration Analysis of the Electric Drive System with Inter-Turn Short-Circuit and Gear Spalling Faults. J. Vib. Eng. Technol. 2023, 11, 3595–3605. [Google Scholar] [CrossRef]
- Wu, Y.-H.; Liu, M.-Y.; Song, H.; Li, C.; Yang, X.-L. A Temperature and Magnetic Field-Based Approach for Stator Inter-Turn Fault Detection. IEEE Sens. J. 2022, 22, 17799–17807. [Google Scholar] [CrossRef]
- Wei, D.; Liu, K.; Zhu, Z.-Q.; Zhou, S.; Wang, J.; Chen, Y. Rotor Speed Signature Analysis-Based Inter-Turn Short Circuit Fault Detection for Permanent Magnet Synchronous Machines. IET Electric Power Applications 2024, 18, 1187–1199. [Google Scholar] [CrossRef]
- Wei, D.; Liu, K.; Wang, J.; Zhou, S.; Cai, H.; Chen, J. Detection of Inter-Turn Short Circuit Fault in Permanent Magnet Synchronous Machine under Phase Current Reconstruction Control. In Proceedings of the 2023 26th International Conference on Electrical Machines and Systems (ICEMS); IEEE: Zhuhai, China, November 5, 2023; pp. 2164–2168. [Google Scholar]
- Liu, C.; Xiao, L.; Zou, J.; Xu, Y.; Li, S. Analysis and Monitoring Method for Inter-Turn Short-Circuit Fault for PMSM. IEEE Trans. Magn. 2023, 59, 1–6. [Google Scholar] [CrossRef]
- Leboeuf, N.; Boileau, T.; Nahid-Mobarakeh, B.; Clerc, G.; Meibody-Tabar, F. Real-Time Detection of Interturn Faults in PM Drives Using Back-EMF Estimation and Residual Analysis. IEEE Trans. Ind. Appl. 2011, 47, 2402–2412. [Google Scholar] [CrossRef]
- Mazzoletti, M.A.; Bossio, G.R.; De Angelo, C.H.; Espinoza-Trejo, D.R. A Model-Based Strategy for Interturn Short-Circuit Fault Diagnosis in PMSM. IEEE Trans. Ind. Electron. 2017, 64, 7218–7228. [Google Scholar] [CrossRef]
- Hu, R.; Wang, J.; Mills, A.R.; Chong, E.; Sun, Z. Current-Residual-Based Stator Interturn Fault Detection in Permanent Magnet Machines. IEEE Trans. Ind. Electron. 2021, 68, 59–69. [Google Scholar] [CrossRef]
- Castro Palavicino, P.; Sarlioglu, B. Estimation of Position and Shorted Turns Percentage of an Inter-Turn Short Circuit in Interior Permanent Magnet Synchronous Machines Based on a Current Observer and Stationary Reference Frame Tracking. IEEE Trans. on Ind. Applicat. 2023, 59, 4066–4075. [Google Scholar] [CrossRef]
- Mahmoudi, A.; Jlassi, I.; Cardoso, A.J.M.; Yahia, K.; Sahraoui, M. Inter-Turn Short-Circuit Faults Diagnosis in Synchronous Reluctance Machines, Using the Luenberger State Observer and Current’s Second-Order Harmonic. IEEE Trans. Ind. Electron. 2022, 69, 8420–8429. [Google Scholar] [CrossRef]
- Qin, Y.; Li, G.J.; Zhu, Z.Q.; Foster, M.P.; Stone, D.A.; Jia, C.J.; McKeever, P. Model-Based Luenberger State Observer for Detecting Interturn Short-Circuits in PM Machines. IEEE Trans. Transp. Electrific. 2024, 1–1. [Google Scholar] [CrossRef]
- Belkhadir, A.; Pusca, R.; Romary, R.; Belkhayat, D.; Zidani, Y. Detection of External Rotor PMSM Inter-Turn Short Circuit Fault Using Extended Kalman Filter. In Proceedings of the 2023 IEEE 14th International Symposium on Diagnostics for Electrical Machines, Power Electronics and Drives (SDEMPED); IEEE: Chania, Greece, August 28 2023; pp. 491–497. [Google Scholar]
- Chen, Z.; Liang, D.; Jia, S.; Yang, L.; Yang, S. Incipient Interturn Short-Circuit Fault Diagnosis of Permanent Magnet Synchronous Motors Based on the Data-Driven Digital Twin Model. IEEE J. Emerg. Sel. Topics Power Electron. 2023, 11, 3514–3524. [Google Scholar] [CrossRef]
- Zanuso, G.; Peretti, L. A Voltage-Distortion-Based Method for Robust Detection and Location of Interturn Fault in Permanent Magnet Synchronous Machine. IEEE Trans. Energy Convers. 2022, 38, 11174–11186. [Google Scholar] [CrossRef]
- Du, B.; Wu, S.; Han, S.; Cui, S. Interturn Fault Diagnosis Strategy for Interior Permanent-Magnet Synchronous Motor of Electric Vehicles Based on Digital Signal Processor. IEEE Trans. Ind. Electron. 2016, 63, 1694–1706. [Google Scholar] [CrossRef]
- Chen, Q.; Han, X.; Liu, G.; Zhao, W.; Shi, H. Inter-Turn Fault Diagnosis and Control for Five-Phase PMSMs by Disturbance Observer. IEEE Trans. Ind. Electron. 2024, 1–9. [Google Scholar] [CrossRef]
- Cui, R.; Fan, Y.; Li, C. On-Line Inter-Turn Short-Circuit Fault Diagnosis and Torque Ripple Minimization Control Strategy Based on OW Five-Phase BFTHE-IPM. IEEE Trans. Energy Convers. 2018, 33, 2200–2209. [Google Scholar] [CrossRef]
- Xu, Y.; Wang, Y.; Zou, J. An Inter-Turn Short-Circuits Fault Detection Strategy Considering Inverter Nonlinearity and Current Measurement Errors for Sensorless Control of SPMSM. IEEE Trans. Ind. Electron. 2022, 69, 11709–11722. [Google Scholar] [CrossRef]
- Upadhyay, A.; Alakula, M. A Theoretical Study of Stator Flux Linkage DC Offset Based Stator Fault Detection for PMSM Drive Systems.; 2022; pp. 1–6.
- Yang, Y.; Chen, Y.; Hao, W. Online Detection of Inter-turn Short-circuit Fault in Dual-redundancy Permanent Magnet Synchronous Motor. IET Electr. Power Appl. 2020, 15, 104–113. [Google Scholar] [CrossRef]
- Feng, X.; Wang, B.; Liu, C.; Zeng, J.; Wang, Z. Research on Inter-Turn Short-Circuit Fault Diagnosis Method Based on High Frequency Voltage Residual for PMSM. Trans. Electr. Mach. Syst. 2023, 7, 256–265. [Google Scholar] [CrossRef]
- Wang, H.; Hu, J.; Li, Y. Interturn Fault Severity Monitoring in Symmetrical Six-Phase PMSMs Using Subspace Negative-Sequence High-Frequency Current Residuals. IEEE Trans. Power Electron. 2024, 1–10. [Google Scholar] [CrossRef]
- Fan, P.; Zhang, Y. A Detection Method for Interturn Short-Circuit Fault of Five-Phase Surface Mounted PMSM. In Proceedings of the 2023 26th International Conference on Electrical Machines and Systems (ICEMS); IEEE: Zhuhai, China, November 5, 2023; pp. 68–73. [Google Scholar]
- Aubert, B.; Regnier, J.; Caux, S.; Alejo, D. Kalman-Filter-Based Indicator for Online Interturn Short Circuits Detection in Permanent-Magnet Synchronous Generators. IEEE Trans. Ind. Electron. 2015, 62, 1921–1930. [Google Scholar] [CrossRef]
- El Sayed, W.; Abd El Geliel, M.; Lotfy, A. Fault Diagnosis of PMSG Stator Inter-Turn Fault Using Extended Kalman Filter and Unscented Kalman Filter. Energies 2020, 13. [Google Scholar] [CrossRef]
- Zhang, J.; Zhan, W.; Ehsani, M. Diagnosis and Fault-Tolerant Control of Permanent Magnet Synchronous Motors with Interturn Short-Circuit Fault. IEEE Trans. Contr. Syst. Technol. 2023, 31, 1909–1916. [Google Scholar] [CrossRef]
- He, Q.; Pan, J.; Lyu, X. Early Performance Degradation Detecting Method for PMSM Based on Change in Frequency Domain Features of Three-Phase Stator Current. IEEE Access 2023, 11, 123361–123372. [Google Scholar] [CrossRef]
- Zezula, L.; Kozovsky, M.; Blaha, P. Diagnostics of Interturn Short Circuits in PMSMs with Online Fault Indicators Estimation. IEEE Trans. Ind. Electron. 2024, 1–11. [Google Scholar] [CrossRef]
- Kang, Y.; Yao, L. Fault Isolation and Estimation for Turn-to-Turn Short Circuit in Permanent Magnet Synchronous Motor. IEEE Trans. Instrum. Meas. 2024, 73, 1–11. [Google Scholar] [CrossRef]
- Xu, Z.; Hu, C.; Yang, F.; Kuo, S.-H.; Goh, C.-K.; Gupta, A.; Nadarajan, S. Data-Driven Inter-Turn Short Circuit Fault Detection in Induction Machines. IEEE Access 2017, 5, 25055–25068. [Google Scholar] [CrossRef]
- Wang, B.; Shen, C.; Xu, K.; Zheng, T. Turn-to-turn Short Circuit of Motor Stator Fault Diagnosis in Continuous State Based on Deep Auto-encoder. IET Electr. Power Appl. 2019, 13, 1598–1606. [Google Scholar] [CrossRef]
- Mahmoud, M.S.; Huynh, V.K.; Senanyaka, J.S.L.; Robbersmyr, K.G. Robust Multiple-Fault Diagnosis of PMSM Drives Under Variant Operations and Noisy Conditions. IEEE Open J. Ind. Electron. Soc. 2023, 4, 762–772. [Google Scholar] [CrossRef]
- Maraaba, L.S.; Milhem, A.S.; Nemer, I.A.; Al-Duwaish, H.; Abido, M.A. Convolutional Neural Network-Based Inter-Turn Fault Diagnosis in LSPMSMs. IEEE Access 2020, 8, 81960–81970. [Google Scholar] [CrossRef]
- Shih, K.-J.; Hsieh, M.-F.; Chen, B.-J.; Huang, S.-F. Machine Learning for Inter-Turn Short-Circuit Fault Diagnosis in Permanent Magnet Synchronous Motors. IEEE Trans. Magn. 2022, 58, 1–7. [Google Scholar] [CrossRef]
- Song, Q.; Wang, M.; Lai, W.; Zhao, S. On Bayesian Optimization-Based Residual CNN for Estimation of Inter-Turn Short Circuit Fault in PMSM. IEEE Trans. Power Electron. 2023, 38, 2456–2468. [Google Scholar] [CrossRef]
- Wang, M.; Song, Q.; Lai, W. On Model-Based Transfer Learning Method for the Detection of Inter-Turn Short Circuit Faults in PMSM. Sensors 2023, 23, 9145. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Wang, R.; Mao, R.; Zhang, Y.; Zhu, K.; Li, Y.; Zhang, J. A Fault Diagnosis Method Based on an Improved Deep Q-Network for the Interturn Short Circuits of a Permanent Magnet Synchronous Motor. IEEE Trans. Transp. Electrific. 2024, 10, 3870–3887. [Google Scholar] [CrossRef]
- Li, H.; Shen, J.; Shi, C.; Shi, T. Hybrid Learning Model-Based Inter-Turn Short Circuit Fault Diagnosis of PMSM. In Proceedings of the 2023 IEEE Transportation Electrification Conference and Expo, Asia-Pacific (ITEC Asia-Pacific); IEEE: Chiang Mai, Thailand, November 28 2023; pp. 1–6. [Google Scholar]
- Parvin, F.; Faiz, J.; Qi, Y.; Kalhor, A.; Akin, B. A Comprehensive Inter-Turn Fault Severity Diagnosis Method for Permanent Magnet Synchronous Motors Based on Transformer Neural Networks. IEEE Trans. Ind. Inform. 2023, 1–11. [Google Scholar] [CrossRef]
- Lee, H.; Jeong, H.; Koo, G.; Ban, J.; Kim, S.W. Attention Recurrent Neural Network-Based Severity Estimation Method for Interturn Short-Circuit Fault in Permanent Magnet Synchronous Machines. IEEE Trans. Ind. Electron. 2021, 68, 3445–3453. [Google Scholar] [CrossRef]
- Tallam, R.M.; Habetler, T.G.; Harley, R.G. Stator Winding Turn-Fault Detection for Closed-Loop Induction Motor Drives. IEEE Trans. Ind. Appl. 2003, 39, 720–724. [Google Scholar] [CrossRef]
- Pietrzak, P.; Wolkiewicz, M. On-Line Detection and Classification of PMSM Stator Winding Faults Based on Stator Current Symmetrical Components Analysis and the KNN Algorithm. Electronics 2021, 10. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, Y.; Zhu, K.; Zhang, Y.; Li, Y. Diagnosis of Interturn Short-Circuit Faults in Permanent Magnet Synchronous Motors Based on Few-Shot Learning under a Federated Learning Framework. IEEE Trans. Ind. Inform. 2021, 17, 8495–8504. [Google Scholar] [CrossRef]
- Haddad, R.Z.; Strangas, E.G. On the Accuracy of Fault Detection and Separation in Permanent Magnet Synchronous Machines Using MCSA/MVSA and LDA. IEEE Trans. Energy Convers. 2016, 31, 924–934. [Google Scholar] [CrossRef]
- Maraaba, L.S.; Al-Hamouz, Z.M.; Milhem, A.S.; Abido, M.A. Neural Network-Based Diagnostic Tool for Detecting Stator Inter-Turn Faults in Line Start Permanent Magnet Synchronous Motors. IEEE Access 2019, 7, 89014–89025. [Google Scholar] [CrossRef]
- Wei, D.; Liu, K.; Wang, J.; Zhou, S.; Li, K. ResNet-18 Based Inter-Turn Short Circuit Fault Diagnosis of PMSMs with Consideration of Speed and Current Loop Bandwidths. IEEE Trans. Transp. Electrific. 2023, 1–1. [Google Scholar] [CrossRef]
- Pietrzak, P.; Wolkiewicz, M.; Orlowska-Kowalska, T. PMSM Stator Winding Fault Detection and Classification Based on Bispectrum Analysis and Convolutional Neural Network. IEEE Trans. Ind. Electron. 2023, 70, 5192–5202. [Google Scholar] [CrossRef]
- Li, L.; Liao, S.; Zou, B.; Liu, J. Mechanism-Based Fault Diagnosis Deep Learning Method for Permanent Magnet Synchronous Motor. Sensors 2024, 24, 6349. [Google Scholar] [CrossRef] [PubMed]
- Zsuga, Á.; Dineva, A. Data-Driven Onboard Inter-Turn Short Circuit Fault Diagnosis for Electric Vehicles by Using Real-Time Simulation Environment. IEEE Access 2023, 1–1. [Google Scholar] [CrossRef]
- Kumar, R.R.; Randazzo, V.; Cirrincione, G.; Cirrincione, M.; Pasero, E.; Tortella, A.; Andriollo, M. Induction Machine Stator Fault Tracking Using the Growing Curvilinear Component Analysis. IEEE Access 2021, 9, 2201–2212. [Google Scholar] [CrossRef]
- Wu, X.; Geng, Y.; Li, M.; Wang, W.; Tu, M. Inter-Turn Short Circuit Diagnosis of Permanent Magnet Synchronous Motor Based on Siamese Convolutional Neural Network Under Small Fault Samples. IEEE Sensors J. 2024, 24, 26982–26993. [Google Scholar] [CrossRef]
- Chen, Z.; Liang, D.; Jia, S.; Yang, S. Model-Based Data Normalization for Data-Driven PMSM Fault Diagnosis. IEEE Trans. Power Electron. 2024, 39, 11596–11612. [Google Scholar] [CrossRef]
- Lv, K.; Wang, D.; Huang, W.; Hu, J. Research on Fault Indicator for Integrated Fault Diagnosis System of PMSM Based on Stator Tooth Flux. IEEE J. Emerg. Sel. Topics Power Electron. 2024, 12, 985–996. [Google Scholar] [CrossRef]
- Rafiei, V.; Khoshlessan, M.; Caicedo-Narvaez, C.; Fahimi, B. Detection of Inter-Turn Short Circuit in Stator Windings of Electric Machines Using Magnetic Symmetry Index and Machine Learning Methods. IEEE Trans. Energy Convers. 2024, 1–11. [Google Scholar] [CrossRef]
- Cao, W.; Huang, R.; Wang, H.; Lu, S.; Hu, Y.; Hu, C.; Huang, X. Analysis of Inter-Turn Short-Circuit Faults in Brushless DC Motors Based on Magnetic Leakage Flux and Back Propagation Neural Network. IEEE Trans. Energy Convers. 2023, 38, 2273–2281. [Google Scholar] [CrossRef]
- Li, H.; Shi, T. Diagnosis of Inter-Turn Short-Circuit Incipient Fault in Permanent Magnet Synchronous Motors Using Input Current on the Power Side. IEEE Trans. Ind. Inf. 2024, 1–12. [Google Scholar] [CrossRef]
- Ibrahim, R.; Zemouri, R.; Kedjar, B.; Merkhouf, A.; Tahan, A.; Al-Haddad, K.; Lafleur, F. Non-Invasive Detection of Rotor Inter-Turn Short Circuit of a Hydrogenerator Using AI-Based Variational Autoencoder. IEEE Trans. on Ind. Applicat. 2023, 1–10. [Google Scholar] [CrossRef]
- Li, G.J.; Ren, B.; Zhu, Z.Q.; Foster, M.P.; Stone, D.A. Demagnetization Withstand Capability Enhancement of Surface Mounted PM Machines Using Stator Modularity. IEEE Trans. Ind. Appl. 2018, 54, 1302–1311. [Google Scholar] [CrossRef]
- Du, Y.; Wu, L.; Zhan, H.; Fang, Y. Influence of Dimensional Parameters on Three-Phase Short Circuit and Demagnetization in Surface-Mounted PM Machines. IEEE Trans. Energy Convers. 2021, 36, 2514–2523. [Google Scholar] [CrossRef]
- Urresty, J.-C.; Riba, J.-R.; Romeral, L. A Back-Emf Based Method to Detect Magnet Failures in PMSMs. IEEE Trans. Magn. 2013, 49, 591–598. [Google Scholar] [CrossRef]
- Urresty, J.-C.; Riba, J.-R.; Delgado, M.; Romeral, L. Detection of Demagnetization Faults in Surface-Mounted Permanent Magnet Synchronous Motors by Means of the Zero-Sequence Voltage Component. IEEE Trans. Energy Convers. 2012, 27, 42–51. [Google Scholar] [CrossRef]
- Zhan, H.; Wu, L.; Lyu, Z.; Du, Y.; Fang, Y. Uneven Demagnetization Fault Diagnosis in Dual Three-Phase Permanent Magnet Machines Based on Electrical Signal Difference. IEEE Trans. Transp. Electrif. 2022, 1–1. [Google Scholar] [CrossRef]
- Zafarani, M.; Goktas, T.; Akin, B.; Fedigan, S.E. An Investigation of Motor Topology Impacts on Magnet Defect Fault Signatures. IEEE Trans. Ind. Electron. 2017, 64, 32–42. [Google Scholar] [CrossRef]
- Rajagopalan, S.; Roux, W. le; Habetler, T.G.; Harley, R.G. Dynamic Eccentricity and Demagnetized Rotor Magnet Detection in Trapezoidal Flux (Brushless DC) Motors Operating under Different Load Conditions. IEEE Trans. Power Electron. 2007, 22, 2061–2069. [Google Scholar] [CrossRef]
- Garcia-Calva, T.A.; Gyftakis, K.N.; Skarmoutsos, G.A.; Mueller, M.; Morinigo-Sotelo, D.; Romero-Troncoso, R.D.J. Advanced Signal Processing Techniques for Demagnetization Detection in PM Generators at Variable Speed. IEEE Trans. on Ind. Applicat. 2023, 1–10. [Google Scholar] [CrossRef]
- Ruiz, J.R.R.; Rosero, J.A.; Espinosa, A.G.; Romeral, L. Detection of Demagnetization Faults in Permanent-Magnet Synchronous Motors under Nonstationary Conditions. IEEE Trans. Magn. 2009, 45, 2961–2969. [Google Scholar] [CrossRef]
- Prieto, M.D.; Espinosa, A.G.; Ruiz, J.R.R.; Urresty, J.C.; Ortega, J.A. Feature Extraction of Demagnetization Faults in Permanent-Magnet Synchronous Motors Based on Box-Counting Fractal Dimension. IEEE Trans. Ind. Electron. 2011, 58, 1594–1605. [Google Scholar] [CrossRef]
- Wang, C.; Delgado Prieto, M.; Romeral, L.; Chen, Z.; Blaabjerg, F.; Liu, X. Detection of Partial Demagnetization Fault in PMSMs Operating under Nonstationary Conditions. IEEE Trans. Magn. 2016, 52, 1–4. [Google Scholar] [CrossRef]
- Gyftakis, K.N.; Garcia-Calva, T.A.; Skarmoutsos, G.A.; Morinigo-Sotelo, D.; Mueller, M.; Romero-Troncoso, R. de J. Demagnetization Monitoring and Identification in PM Generators with Concentrated Windings during Transient Conditions. IEEE Trans. Ind. Appl. 2022, 1–10. [Google Scholar] [CrossRef]
- Espinosa, A.G.; Rosero, J.A.; Cusido, J.; Romeral, L.; Ortega, J.A. Fault Detection by Means of Hilbert–Huang Transform of the Stator Current in a PMSM with Demagnetization. IEEE Trans. Energy Convers. 2010, 25, 312–318. [Google Scholar] [CrossRef]
- Chen, Z.; Liang, Z.; Liang, D.; Jia, S. Partial Demagnetization Fault Analysis and Diagnosis for Fractional Slot Concentrated Winding PMSMs Based on DQ-Axis Components. IEEE Trans. Energy Convers. 2024, 1–11. [Google Scholar] [CrossRef]
- Goktas, T.; Zafarani, M.; Akin, B. Discernment of Broken Magnet and Static Eccentricity Faults in Permanent Magnet Synchronous Motors. IEEE Trans. Energy Convers. 2016, 31, 578–587. [Google Scholar] [CrossRef]
- Zafarani, M.; Goktas, T.; Akin, B. A Comprehensive Analysis of Magnet Defect Faults in Permanent Magnet Synchronous Motors. IEEE Trans. on Ind. Applicat. 2015, 1–1. [Google Scholar] [CrossRef]
- Radwan-Pragłowska, N.; Wegiel, T. Diagnostics of Interior PM Machine Rotor Faults Based on EMF Harmonics. Energies 2024, 17, 2198. [Google Scholar] [CrossRef]
- Rasid, S.A.; Gyftakis, K.N.; Mueller, M. Comparative Investigation of Three Diagnostic Methods Applied to Direct-Drive Permanent Magnet Machines Suffering from Demagnetization. Energies 2023, 16, 2767. [Google Scholar] [CrossRef]
- Gritli, Y.; Rossi, C.; Rizzoli, G.; Mengoni, M.; Tani, A.; Casadei, D. Robust Online Magnet Demagnetization Diagnosis in Asymmetrical Six-Phase AC Permanent Magnet Motor Drives. IEEE Access 2023, 11, 50769–50780. [Google Scholar] [CrossRef]
- Hong, J.; Park, S.; Hyun, D.; Kang, T.; Lee, S.B.; Kral, C.; Haumer, A. Detection and Classification of Rotor Demagnetization and Eccentricity Faults for PM Synchronous Motors. IEEE Trans. on Ind. Applicat. 2012, 48, 923–932. [Google Scholar] [CrossRef]
- Jongman, H.; Doosoo, H.; Sang Bin, L.; Ji-Yoon, Y.; Kwang-Woon, L. Automated Monitoring of Magnet Quality for Permanent-Magnet Synchronous Motors at Standstill. IEEE Trans. Ind. Appl. 2010, 46, 1397–1405. [Google Scholar] [CrossRef]
- Fernandez, D.; Reigosa, D.D.; Guerrero, J.M.; Zhu, Z.-Q.; Briz, F. Permanent-Magnet Magnetization State Estimation Using High-Frequency Signal Injection. IEEE Trans. Ind. Appl. 2016, 52, 2930–2940. [Google Scholar] [CrossRef]
- Diaz Reigosa, D.; Fernandez, D.; Zhu, Z.-Q.; Briz, F. PMSM Magnetization State Estimation Based on Stator-Reflected PM Resistance Using High-Frequency Signal Injection. IEEE Trans. Ind. Appl. 2015, 51, 3800–3810. [Google Scholar] [CrossRef]
- He, W.; Hang, J.; Ding, S.; Sun, L.; Hua, W. Robust Diagnosis of Partial Demagnetization Fault in PMSMs Using Radial Air-Gap Flux Density under Complex Working Conditions. IEEE Trans. Ind. Electron. 2024, 1–10. [Google Scholar] [CrossRef]
- Zeng, C.; Huang, S.; Lei, J.; Wan, Z.; Yang, Y. Online Rotor Fault Diagnosis of Permanent Magnet Synchronous Motors Based on Stator Tooth Flux. IEEE Trans. Ind. Appl. 2021, 57, 2366–2377. [Google Scholar] [CrossRef]
- Orviz, M.; Laborda, D.F.; Reigosa, D.; Lee, H.-J.; Rafaq, M.S.; Lee, S.B.; Briz, F. Demagnetization Detection and Severity Assessment in PMSMs Using Search Coils Exploiting Machine’s Symmetry. IEEE Trans. on Ind. Applicat. 2023, 59, 4021–4034. [Google Scholar] [CrossRef]
- Im, J.-H.; Kang, J.-K.; Heo, J.-H.; Hur, J. Utilization of Multiple Planar Search Coils for Diagnosing Imbalance Irreversible Demagnetization Faults in PMSMs Along the Z-Axis. IEEE Trans. on Ind. Applicat. 2024, 60, 5988–5997. [Google Scholar] [CrossRef]
- Huang, W.; Chen, J.; Su, W.; Liu, H.; Lv, K.; Hu, J. A Period Energy Method for Demagnetization Detection in Surface Permanent Magnet Motors with Search Coils. Electronics 2023, 12, 3514. [Google Scholar] [CrossRef]
- Naderi, P. Magnetic-Equivalent-Circuit Approach for Inter-Turn and Demagnetisation Faults Analysis in Surface Mounted Permanent-Magnet Synchronous Machines Using Pole Specific Search-Coil Technique. IET Electric Power Applications 2018, 12, 916–928. [Google Scholar] [CrossRef]
- Rafaq, M.S.; Lee, H.; Park, Y.; Lee, S.-B.; Orviz Zapico, M.; Fernandez, D.; Diaz-Reigosa, D.; Briz, F. Airgap Search Coil Based Identification of PM Synchronous Motor Defects. IEEE Trans. Ind. Electron. 2022, 69, 6551–6560. [Google Scholar] [CrossRef]
- Skarmoutsos, G.A.; Gyftakis, K.N.; Mueller, M. Detecting Partial Demagnetization in AFPM Generators by Monitoring Speed and EMF Induced in a Supplemental Winding. IEEE Trans. Ind. Inform. 2022, 18, 3295–3305. [Google Scholar] [CrossRef]
- Gao, C.; Li, B.; Chen, H.; Xu, Y.; Xu, X.; Si, J.; Hu, Y. A Less-Invasive Method for Accurately Diagnosing of Demagnetization Fault in PMSM Using Rotor Partition. IEEE Trans. Transp. Electrif. 2022, 1–1. [Google Scholar] [CrossRef]
- Chen, H.; Fang, C.; Dong, J.; Lu, S.; Pires, V.; Martins, J.; Aguirre, M.P. Diagnosis of Inter-Turn Short-Circuit of SRM Based on Ratio of Current Components. IEEE Trans. Transp. Electrif. 2022, 1–1. [Google Scholar] [CrossRef]
- Skarmoutsos, G.A.; Gyftakis, K.N.; Mueller, M.A. A New Approach to PM Machine Fault Diagnostics Using Two Magnetically-Coupled Search-Coils.; 2022; pp. 1616–1621.
- Jeong, J.; Lee, H.; Orviz, M.; Lee, S.B.; Reigosa, D.; Briz, F. Detection of Trailing Edge PM Demagnetization in Surface PM Synchronous Motors. IEEE Trans. Ind. Appl. 2023, 1–9. [Google Scholar] [CrossRef]
- Goktas, T.; Arkan, M.; Mamis, M.S.; Akin, B. Broken Rotor Bar Fault Monitoring Based on Fluxgate Sensor Measurement of Leakage Flux. In Proceedings of the 2017 IEEE International Electric Machines and Drives Conference (IEMDC); IEEE: Miami, FL, USA, May 2017; pp. 1–6. [Google Scholar]
- Goktas, T.; Zafarani, M.; Lee, K.W.; Akin, B.; Sculley, T. Comprehensive Analysis of Magnet Defect Fault Monitoring through Leakage Flux. IEEE Trans. Magn. 2017, 53, 1–10. [Google Scholar] [CrossRef]
- Xu, Q.; Liu, X.; Miao, W.; Pong, P.W.T.; Liu, C. Online Detecting Magnet Defect Fault in PMSG with Magnetic Sensing. IEEE Trans. Transp. Electrif. 2021, 7, 2775–2786. [Google Scholar] [CrossRef]
- Reigosa, D.; Fernandez, D.; Park, Y.; Diez, A.B.; Lee, S.B.; Briz, F. Detection of Demagnetization in Permanent Magnet Synchronous Machines Using Hall-Effect Sensors. IEEE Trans. Ind. Appl. 2018, 54, 3338–3349. [Google Scholar] [CrossRef]
- Reigosa, D.; Fernandez, D.; Martinez, M.; Park, Y.; Lee, S.B.; Briz, F. Permanent Magnet Synchronous Machine Non-Uniform Demagnetization Detection Using Zero-Sequence Magnetic Field Density. IEEE Trans. Ind. Appl. 2019, 55, 3823–3833. [Google Scholar] [CrossRef]
- Park, Y.; Yang, C.; Lee, S.B.; Lee, D.-M.; Fernandez, D.; Reigosa, D.; Briz, F. Online Detection and Classification of Rotor and Load Defects in PMSMs Based on Hall Sensor Measurements. IEEE Trans. Ind. Appl. 2019, 55, 3803–3812. [Google Scholar] [CrossRef]
- Park, Y.; Fernandez, D.; Lee, S.B.; Hyun, D.; Jeong, M.; Kommuri, S.K.; Cho, C.; Diaz Reigosa, D.; Briz, F. Online Detection of Rotor Eccentricity and Demagnetization Faults in PMSMs Based on Hall-Effect Field Sensor Measurements. IEEE Trans. Ind. Appl. 2019, 55, 2499–2509. [Google Scholar] [CrossRef]
- Ebrahimi, B.M.; Faiz, J. Demagnetization Fault Diagnosis in Surface Mounted Permanent Magnet Synchronous Motors. IEEE Trans. Magn. 2013, 49, 1185–1192. [Google Scholar] [CrossRef]
- Yang, C.; Wang, Y.; Qiu, H.; Chen, S.; Lian, Z. Electromagnetic Vibration of High-Voltage Line-Start Permanent Magnet Synchronous Motor with Demagnetization Fault. J. Electr. Eng. Technol. 2024, 19, 4143–4158. [Google Scholar] [CrossRef]
- Ai, Q.; Wei, H.; Li, T.; Dou, H.; Zhao, W.; Zhang, Y. Online Demagnetization Fault Recognition for Permanent Magnet Motors Based on the Hall-Effect Analog Sampling. IEEE Trans. Power Electron. 2023, 38, 3600–3611. [Google Scholar] [CrossRef]
- De Bisschop, J.; Abdallh, A.; Sergeant, P.; Dupre, L. Identification of Demagnetization Faults in Axial Flux Permanent Magnet Synchronous Machines Using an Inverse Problem Coupled with an Analytical Model. IEEE Trans. Magn. 2014, 50, 1–4. [Google Scholar] [CrossRef]
- De Bisschop, J.; Vansompel, H.; Sergeant, P.; Dupre, L. Demagnetization Fault Detection in Axial Flux PM Machines by Using Sensing Coils and an Analytical Model. IEEE Trans. Magn. 2017, 53, 1–4. [Google Scholar] [CrossRef]
- le Roux, W.; Harley, R.G.; Habetler, T.G. Detecting Rotor Faults in Low Power Permanent Magnet Synchronous Machines. IEEE Trans. Power Electron. 2007, 22, 322–328. [Google Scholar] [CrossRef]
- Moon, S.; Lee, J.; Jeong, H.; Kim, S.W. Demagnetization Fault Diagnosis of a PMSM Based on Structure Analysis of Motor Inductance. IEEE Trans. Ind. Electron. 2016, 63, 3795–3803. [Google Scholar] [CrossRef]
- Zhu, M.; Hu, W.; Kar, N.C. Torque-Ripple-Based Interior Permanent-Magnet Synchronous Machine Rotor Demagnetization Fault Detection and Current Regulation. IEEE Trans. Ind. Appl. 2017, 53, 2795–2804. [Google Scholar] [CrossRef]
- Liu, Z.; Huang, J.; Li, B. Diagnosing and Distinguishing Rotor Eccentricity from Partial Demagnetisation of Interior PMSM Based on Fluctuation of High-frequency d -axis Inductance and Rotor Flux. IET Electr. Power Appl. 2017, 11, 1265–1275. [Google Scholar] [CrossRef]
- Han, Y.; Chen, S.; Gong, C.; Zhao, X.; Zhang, F.; Li, Y. Accurate SM Disturbance Observer-Based Demagnetization Fault Diagnosis with Parameter Mismatch Impacts Eliminated for IPM Motors. IEEE Trans. Power Electron. 2023, 1–5. [Google Scholar] [CrossRef]
- Yi, C.-P.; Lin, Y.-J.; Ho, P.-J.; Yang, S.-C. Magnet Fault Diagnosis for Permanent Magnet Synchronous Motor Based on Flux Estimation With PWM Voltage Measurement. IEEE Trans. Ind. Electron. 2024, 1–11. [Google Scholar] [CrossRef]
- Vancini, L.; Mengoni, M.; Rizzoli, G.; Zarri, L.; Tani, A. Local Demagnetization Detection in Six-Phase Permanent Magnet Synchronous Machines. IEEE Trans. Ind. Electron. 2024, 71, 5508–5518. [Google Scholar] [CrossRef]
- Skowron, M.; Orlowska-Kowalska, T.; Kowalski, C.T. Detection of Permanent Magnet Damage of PMSM Drive Based on Direct Analysis of the Stator Phase Currents Using Convolutional Neural Network. IEEE Trans. Ind. Electron. 2022, 69, 13665–13675. [Google Scholar] [CrossRef]
- Skowron, M. Transfer Learning-Based Fault Detection System of Permanent Magnet Synchronous Motors. IEEE Access 2024, 12, 135372–135389. [Google Scholar] [CrossRef]
- Minaz, M.R.; Akcan, E. An Effective Method for Detection of Demagnetization Fault in Axial Flux Coreless PMSG with Texture-Based Analysis. IEEE Access 2021, 9, 17438–17449. [Google Scholar] [CrossRef]
- Zhou, S.; Ma, C.; Ji, Z.; Feng, Q.; Zhao, Y.; Wang, Y.; Shen, Z.; Wang, D. A New Data-Driven Diagnosis Method for Compound Fault of Mixed Eccentricity and Demagnetization in External Rotor Permanent Magnet Motors. IEEE Trans. Ind. Inf. 2024, 20, 11794–11805. [Google Scholar] [CrossRef]
- Pietrzak, P.; Wolkiewicz, M. Demagnetization Fault Diagnosis of Permanent Magnet Synchronous Motors Based on Stator Current Signal Processing and Machine Learning Algorithms. Sensors 2023, 23, 1757. [Google Scholar] [CrossRef]
- Koutrakos, K.; Mitronikas, E. Outlier Detection for Permanent Magnet Synchronous Motor (PMSM) Fault Detection and Severity Estimation. Applied Sciences 2024, 14, 4318. [Google Scholar] [CrossRef]
- Kumar, L.; Nadarajan, S.; Vaiyapuri, V.; Gupta, A.; Soong, B.-H.; Nguyen, H.D. Decoupling of Demagnetization Characteristics to Improve the Turn-to-Turn Fault Detection in PMSM Using Machine Learning Methods. In Proceedings of the IECON 2023- 49th Annual Conference of the IEEE Industrial Electronics Society; IEEE: Singapore, Singapore, October 16 2023; pp. 1–6. [Google Scholar]
- Du, B.; Huang, W.; Cheng, Y.; Chen, J.; Tao, R.; Cui, S. Fault Diagnosis and Separation of PMSM Rotor Faults Using Search Coil Based on MVSA and Random Forests. IEEE Trans. Ind. Electron. 2024, 71, 15089–15099. [Google Scholar] [CrossRef]
- Kang, J.-K.; Yoo, D.-W.; Hur, J. Application and Verification of Voltage Angle-Based Fault Diagnosis Method in Six-Phase IPMSM. IEEE Trans. on Ind. Applicat. 2023, 1–12. [Google Scholar] [CrossRef]
- Meiwei, Z.; Weili, L.; Haoyue, T. Demagnetization Fault Diagnosis of the Permanent Magnet Motor for Electric Vehicles Based on Temperature Characteristic Quantity. IEEE Trans. Transp. Electrif. 2023, 9, 759–770. [Google Scholar] [CrossRef]
- Song, J.; Zhao, J.; Zhang, X.; Dong, F.; Zhao, J.; Xu, L.; Yao, Z. Accurate Demagnetization Faults Detection of Dual-Sided Permanent Magnet Linear Motor Using Enveloping and Time-Domain Energy Analysis. IEEE Trans. Ind. Inform. 2020, 16, 6334–6346. [Google Scholar] [CrossRef]
- Song, J.; Zhao, J.; Dong, F.; Zhao, J.; Xu, L.; Yao, Z. A New Demagnetization Fault Recognition and Classification Method for DPMSLM. IEEE Trans. Ind. Inform. 2020, 16, 1559–1570. [Google Scholar] [CrossRef]
- Song, J.; Liu, S.; Duan, Z.; Wu, X.; Ding, W.; Wang, X.; Lu, S. DPMSLM Demagnetization Fault Detection Based on Texture Feature Analysis of Grayscale Fusion Image. IEEE Trans. Instrum. Meas. 2023, 72, 1–12. [Google Scholar] [CrossRef]
- Gao, C.; Gao, B.; Xu, X.; Si, J.; Hu, Y. Automatic Demagnetization Fault Location of Direct-Drive Permanent Magnet Synchronous Motor Using Knowledge Graph. IEEE Trans. Instrum. Meas. 2024, 73, 1–12. [Google Scholar] [CrossRef]
- Huang, F.; Zhang, X.; Qin, G.; Xie, J.; Peng, J.; Huang, S.; Long, Z.; Tang, Y. Demagnetization Fault Diagnosis of Permanent Magnet Synchronous Motors Using Magnetic Leakage Signals. IEEE Trans. Ind. Inform. 2022, 1–1. [Google Scholar] [CrossRef]
- Attestog, S.; Senanayaka, J.S.L.; Khang, H.V.; Robbersmyr, K.G. Robust Active Learning Multiple Fault Diagnosis of PMSM Drives with Sensorless Control under Dynamic Operations and Imbalanced Datasets. IEEE Trans. Ind. Inform. 2022, 1–11. [Google Scholar] [CrossRef]
- Zhu, Z.Q.; Wu, L.J.; Mohd Jamil, M.L. Distortion of Back-EMF and Torque of PM Brushless Machines Due to Eccentricity. IEEE Trans. Magn. 2013, 49, 4927–4936. [Google Scholar] [CrossRef]
- Dorrell, D.G. ; Min-Fu Hsieh; YouGuang Guo Unbalanced Magnet Pull in Large Brushless Rare-Earth Permanent Magnet Motors With Rotor Eccentricity. IEEE Trans. Magn. 2009, 45, 4586–4589. [Google Scholar] [CrossRef]
- Wei, Q.; Zeng, D.; Sun, Z.; Qiu, W.; Shuai, Z.; Li, W. An Improved Conformal Mapping Method for Electromagnetic Vibration Analysis in PMSMs With Rotor Eccentricity. IEEE Trans. Appl. Supercond. 2024, 34, 1–5. [Google Scholar] [CrossRef]
- Zhu, Z.Q.; Wu, L.J.; Mohd Jamil, M.L. Influence of Pole and Slot Number Combinations on Cogging Torque in Permanent-Magnet Machines with Static and Rotating Eccentricities. IEEE Trans. Ind. Appl. 2014, 50, 3265–3277. [Google Scholar] [CrossRef]
- Ebrahimi, B.M.; Faiz, J.; Roshtkhari, M.J. Static-, Dynamic-, and Mixed-Eccentricity Fault Diagnoses in Permanent-Magnet Synchronous Motors. IEEE Trans. Ind. Electron. 2009, 56, 4727–4739. [Google Scholar] [CrossRef]
- Rajagopalan, S.; Aller, J.M.; Restrepo, J.A.; Habetler, T.G.; Harley, R.G. Detection of Rotor Faults in Brushless DC Motors Operating Under Nonstationary Conditions. IEEE Trans. on Ind. Applicat. 2006, 42, 1464–1477. [Google Scholar] [CrossRef]
- Rajagopalan, S.; Aller, J.M.; Restrepo, J.A.; Habetler, T.G.; Harley, R.G. Analytic-Wavelet-Ridge-Based Detection of Dynamic Eccentricity in Brushless Direct Current (BLDC) Motors Functioning under Dynamic Operating Conditions. IEEE Trans. Ind. Electron. 2007, 54, 1410–1419. [Google Scholar] [CrossRef]
- Rajagopalan, S.; Restrepo, J.A.; Aller, J.M.; Habetler, T.G.; Harley, R.G. Nonstationary Motor Fault Detection Using Recent Quadratic Time–Frequency Representations. IEEE Trans. Ind. Appl. 2008, 44, 735–744. [Google Scholar] [CrossRef]
- Koura, M.B.; Boudinar, A.H.; Aimer, A.F.; Bendiabdellah, A.; Gherabi, Z. Diagnosis and Discernment between Eccentricity and Demagnetization Faults in PMSM Drives. J. Power Electron. 2021, 21, 563–573. [Google Scholar] [CrossRef]
- Ebrahimi, B.M.; Faiz, J. Configuration Impacts on Eccentricity Fault Detection in Permanent Magnet Synchronous Motors. IEEE Trans. Magn. 2012, 48, 903–906. [Google Scholar] [CrossRef]
- Jin, X.; Qiao, W.; Peng, Y.; Cheng, F.; Qu, L. Quantitative Evaluation of Wind Turbine Faults Under Variable Operational Conditions. IEEE Trans. on Ind. Applicat. 2016, 52, 2061–2069. [Google Scholar] [CrossRef]
- Skarmoutsos, G.A.; Gyftakis, K.N.; Mueller, M. Analytical Prediction of the MCSA Signatures under Dynamic Eccentricity in PM Machines with Concentrated Non-Overlapping Windings. IEEE Trans. Energy Convers. 2022, 37, 1011–1019. [Google Scholar] [CrossRef]
- Zhan, H.; Wu, L.; Lyu, Z.; Du, Y.; Duan, R. Detecting Eccentricity Fault in Permanent Magnet Synchronous Machines by Means of Zero-Sequence Voltage Component. IEEE Trans. on Ind. Applicat. 2024, 60, 6761–6774. [Google Scholar] [CrossRef]
- Zhou, S.; Ma, C.; Zhu, C.; Wang, J.; Gao, Y.; Wei, Y.; Liu, Z.; Feng, Q. A New Dynamic Eccentricity Diagnosis Method for Permanent Magnet Motors Considering Variable-Speed and Speed Fluctuation Conditions. IEEE Trans. Instrum. Meas. 2024, 1–1. [Google Scholar] [CrossRef]
- Hong, J.; Lee, S.B.; Kral, C.; Haumer, A. Detection of Airgap Eccentricity for Permanent Magnet Synchronous Motors Based on the D-Axis Inductance. IEEE Trans. Power Electron. 2012, 27, 2605–2612. [Google Scholar] [CrossRef]
- Aggarwal, A.; Allafi, I.M.; Strangas, E.G.; Agapiou, J.S. Off-Line Detection of Static Eccentricity of PMSM Robust to Machine Operating Temperature and Rotor Position Misalignment Using Incremental Inductance Approach. IEEE Trans. Transp. Electrif. 2021, 7, 161–169. [Google Scholar] [CrossRef]
- Kang, K.; Song, J.; Kang, C.; Sung, S.; Jang, G. Real-Time Detection of the Dynamic Eccentricity in Permanent-Magnet Synchronous Motors by Monitoring Speed and Back EMF Induced in an Additional Winding. IEEE Trans. Ind. Electron. 2017, 64, 7191–7200. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, K.; Hua, W.; Zhang, C.; Wu, Z.; Zhang, H. Analysis and Detection of Rotor Eccentricity in Permanent Magnet Synchronous Machines Based on Linear Hall Sensors. IEEE Trans. Power Electron. 2022, 37, 4719–4729. [Google Scholar] [CrossRef]
- Ehya, H.; Nysveen, A.; Antonino-Daviu, J.A. Advanced Fault Detection of Synchronous Generators Using Stray Magnetic Field. IEEE Trans. Ind. Electron. 2022, 69, 11675–11685. [Google Scholar] [CrossRef]
- Ehya, H.; Nysveen, A.; Nilssen, R.; Liu, Y. Static and Dynamic Eccentricity Fault Diagnosis of Large Salient Pole Synchronous Generators by Means of External Magnetic Field. IET Electric Power Applications 2021, 15, 890–902. [Google Scholar] [CrossRef]
- Cui, H.; Ma, C.; Wang, Y.; Li, X.; He, Y.; Shen, Z.; Ji, Z.; Wang, P. Analytical Calculation of Stray Magnetic Field in Interior Permanent Magnet Synchronous Motor Under Static Eccentricity Considering Nonlinear and Non-Uniform Magnetic Saturation. IEEE Trans. Magn. 2024, 1–1. [Google Scholar] [CrossRef]
- He, Y.-L.; Zhang, Z.-J.; Tao, W.-Q.; Wang, X.-L.; Gerada, D.; Gerada, C.; Gao, P. A New External Search Coil Based Method to Detect Detailed Static Air-Gap Eccentricity Position in Nonsalient Pole Synchronous Generators. IEEE Trans. Ind. Electron. 2021, 68, 7535–7544. [Google Scholar] [CrossRef]
- Park, J.-C.; Park, S.-H.; Kim, J.-H.; Lee, S.-G.; Lee, G.-H.; Lim, M.-S. Diagnosis and Robust Design Optimization of SPMSM Considering Back EMF and Cogging Torque Due to Static Eccentricity. Energies 2021, 14, 2900. [Google Scholar] [CrossRef]
- Hsieh, M.-F.; Yeh, Y.-H. Rotor Eccentricity Effect on Cogging Torque of PM Generators for Small Wind Turbines. IEEE Trans. Magn. 2013, 49, 1897–1900. [Google Scholar] [CrossRef]
- Chen, Z.; Wang, F.; Fan, C.; Ling, Z.; Li, Z.; Wang, Q. Analysis of Rotor Eccentricity Fault in IPMSM With Different Armature Winding Structures. IEEE Trans. Magn. 2023, 59, 1–10. [Google Scholar] [CrossRef]
- Du, J.; Zhong, R.; Wu, Z.; Hua, W.; Wu, Z.; Zhang, C. Effect of Eccentricity on Vibration and Noise of External-Rotor PMSM. In Proceedings of the 2024 International Conference on Electrical Machines (ICEM); IEEE: Torino, Italy, September 1 2024; pp. 1–6. [Google Scholar]
- Conggan Ma; Shuguang Zuo Black-Box Method of Identification and Diagnosis of Abnormal Noise Sources of Permanent Magnet Synchronous Machines for Electric Vehicles. IEEE Trans. Ind. Electron. 2014, 61, 5538–5549. [CrossRef]
- Kang, J.-K.; Hur, J. Static Eccentric Fault Diagnosis of IPMSM Using Thermocouple Sensor. In Proceedings of the 2023 IEEE Energy Conversion Congress and Exposition (ECCE); IEEE: Nashville, TN, USA, October 29, 2023; pp. 4465–4468. [Google Scholar]
- Ebrahimi, B.M.; Faiz, J.; Araabi, B.N. Pattern Identification for Eccentricity Fault Diagnosis in Permanent Magnet Synchronous Motors Using Stator Current Monitoring. IET Electr. Power Appl. 2010, 4, 418–430. [Google Scholar] [CrossRef]
- Ebrahimi, B.M.; Javan Roshtkhari, M.; Faiz, J.; Khatami, S.V. Advanced Eccentricity Fault Recognition in Permanent Magnet Synchronous Motors Using Stator Current Signature Analysis. IEEE Trans. Ind. Electron. 2014, 61, 2041–2052. [Google Scholar] [CrossRef]
- Sun, W.; Wang, H.; Qu, R. A Novel Data Generation and Quantitative Characterization Method of Motor Static Eccentricity with Adversarial Network. IEEE Trans. Power Electron. 2023, 1–5. [Google Scholar] [CrossRef]
- Wang, H.; Sun, W.; Jiang, D.; Liu, Z.; Qu, R. Rotor Eccentricity Quantitative Characterization Based on Physics-Informed Adversarial Network and Health Condition Data Only. IEEE Trans. Ind. Electron. 2024, 71, 6738–6752. [Google Scholar] [CrossRef]
- Song, J.; Wu, X.; Qian, L.; Lv, W.; Wang, X.; Lu, S. PMSLM Eccentricity Fault Diagnosis Based on Deep Feature Fusion of Stray Magnetic Field Signals. IEEE Trans. Instrum. Meas. 2024, 73, 1–12. [Google Scholar] [CrossRef]

| Signal Types | Fault Indicator Types | Advantages | Disadvantages | |
|---|---|---|---|---|
| Electrical signals | Symmetrical components | ZSC | + Suitable for online detection + Irrelevant to winding topology & pole-slot combination |
- Troublesome to measure ZSC voltage |
| NSC | + Irrelevant to winding topology & pole-slot combination + Higher amplitude than ZSC + Easier to obtain |
- Affected by unbalanced input | ||
| LF pattern | 3-phases harmonics | + Easy to obtain + Readily integrated in control system |
- Difficult for transient process - Usually high computational burden - Influenced by winding topology |
|
| dq-axis harmonics | ||||
| Impedance | + Less influenced by controller bandwidth | - Influenced by saturation/temperature | ||
| Instantaneous power | + Less influenced by controller bandwidth | - Sensitive to load & speed - Low sensitivity at no-load condition |
||
| Others | + Easy to obtain | - Not suitable for transient process | ||
| HF pattern | Injection | + Steady sensitivity + Suitable for wide range of load & speed |
- Vibration & noise - Influence on control performance |
|
| PWM related | + High SNR | - Low sensitivity at no-load condition - Difficult to sample PWM ripple current |
||
| Magnetic signals | Invasive | + High SNR | - Invasive - Usually need many sensors |
|
| Less-invasive | Stator back side | + Less invasive | - Influenced by housing | |
| End region | - Low SNR | |||
| Signatures | Advantages | Disadvantages | ||
|---|---|---|---|---|
| Estimation residual | + Less computational burden | + Suitable for non-stationary condition | - Dependent on machine parameters | |
| Estimated shorted turn ratio | + Easy to evaluate fault severity | - More estimated variables | ||
| Others | ||||
| Input Data Types | Advantages | Disadvantages | |
|---|---|---|---|
| Electrical signals | Time series | + Non-invasive + No need for choosing signal analysis tools |
- Difficult to integrate the information about widely adopted fault harmonics |
| Symmetric components | + Non-invasive + High sensitivity |
- May be limited by the information in the extracted features | |
| Spectrum | |||
| Magnetic signals | Airgap flux density | + High sensitivity | - Invasive |
| Stray flux density | - Relatively low SNR | ||
| Signal Types | Fault Signature Types | Advantages | Disadvantages | |
|---|---|---|---|---|
| Electrical signals | Symmetrical components | ZSC | + Irrelevant to winding topology or machine topology | - Difficult to measure |
| Frequency pattern | Spectrum | + Non-invasive | - Highly dependent on winding topology & machine topology | |
| Impedance | + High SNR | - Highly influenced by temperature | ||
| Others | Waveform pattern | + Intuitive & simple | - Highly influenced by saturation | |
| Magnetic signals | Invasive | All tooth mounted | + Distinguishable among different faults + Intuitive |
- Large amount of sensors |
| Few teeth mounted | + Fewer sensors | - Relatively difficult to distinguish PD from other faults | ||
| Pole-specific search coils | ||||
| Less-invasive | Stator back side | + Less invasive | - Affected by housing | |
| End region | - Difficult to accurately mount the sensors | |||
| Signal Sources | Signatures | Advantages | Disadvantages | |
|---|---|---|---|---|
| Voltage/Current | Estimated rotor flux | + Non-intrusive | + Suitable for transient condition | - Unable to locate fault - Low sensitivity - Essentially influenced by machine topology |
| Flux signal + Voltage/current |
Estimation residual | + High sensitivity | - High cost of flux sensors - Invasive |
|
| Signal Sources | Advantages | Disadvantages | |||
|---|---|---|---|---|---|
| Electrical signals | Voltages & currents | + Non-invasive | + Suitable for multi-sensors fusion + High sensitivity |
- Influenced by machine topology | - High computational burden |
| Magnetic signals | Airgap flux | + Universal | - Need extra sensors | ||
| Stray flux | + Less invasive | ||||
| Others | Torque | + Non-invasive | |||
| Acoustic noise | |||||
| Fault Signature Types | Advantages | Disadvantages | ||
|---|---|---|---|---|
| Electrical signals | Voltage/Current spectrum | + Non-invasive | - Dependent on winding topology / machine topology | |
| Impedance | + Less influenced by machine topology | - Highly sensitive to working conditions | ||
| Magnetic signals | Invasive | All tooth wound | + High sensitivity | - Need a lot of sensors - Invasive |
| Fewer sensors | + Relatively low cost | |||
| Less invasive | Stator back side | + Less invasive | - Influenced by housing | |
| End region | - Need accurate position of search coils | |||
| Fault Signature Types | Advantages | Disadvantages | ||
|---|---|---|---|---|
| Electrical signals | + Non-invasive | - Dependent on winding topology / machine topology | ||
| Magnetic signals | Invasive | All tooth wound | + High sensitivity + Able to distinguish SE, DE, PD, and ITSC |
- Need a lot of sensors - Invasive |
| Fewer sensors | + Relatively low cost + Able to distinguish DE from PD |
- Invasive | ||
| Less invasive | End region | + Less invasive | - Low SNR | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).



