
Submitted:
13 March 2024
Posted:
18 March 2024
You are already at the latest version
Abstract
In an effort to enhance the efficiency and safety of open-pit mines, this study explores the optimization of end slope road parameters and slope structures, specifically focusing on unmanned driving lanes.A significant aspect of the study is the development of a truck trajectory offset model, which considers the different reaction times between automated sensors and human drivers in adapting to environmental changes. To test these concepts, the study uses numerical simulations to confirm the stability of the proposed end slope designs. Using Victory West Mine No. 1 as a case study, the research determines the optimized width for unmanned driving lanes and the maximum angle for safe steepening of end slopes. The findings indicate that the optimized unmanned lane width for NTE240 mining dump trucks is 1743 mm, allowing for a 2-degree increase in the slope angle at the south end slope. This optimization leads to a steep mining stripping volume of 3.2735 million m³ and a coal output of 2.49628 million tons, maintaining a stripping ratio of 1.31m³/t. These results demonstrate that the unmanned driving road width optimization not only ensures slope safety but also significantly boosts the economic benefits of steep mining in open-pit mines.
Keywords:
Unmanned driving
; Truck dynamics
; Offset reaction time
; Road width
; Economic benefits
1. Introduction
In recent years, open-pit mines have focused on advancing their technological capabilities and integrating information technology with industrialization. Mine intelligence, unmanned technology, and eco-friendliness are key areas of energy technology innovation supported by the state(Woet al. 2022). In this process, unmanned technology as a high-tech solution has been extensively implemented in open-pit mines. The implementation of autonomous technology in surface mine transportation can effectively mitigate issues such as low production efficiency, elevated safety hazards, and increased coal compression caused by traditional transportation practices. Currently, Komatsu Company's autonomous mining dump trucks have been operational for several years in Australia, Chile, and other countries, amassing ample experience. Meanwhile, China's autonomous mining truck technology has yet to progress beyond the developmental stage(BellamyandPravica 2011). In recent years, several of China's major open-pit mines have introduced autonomous vehicles, including the State Energy Nortel Shengli Energy Shengli West No. 1 Open-pit Coal Mine, the State Energy Group Baorixil Open-pit Coal Mine, and Huaneng Yimin Coal and Power Limited Liability Company's Yimin Open-pit Coal Mine(Xuet al. 2023,Ahumada,PintoandHerzog 2021). For the technical model of unmanned mining dump trucks, despite significant contributions from scholars both domestically and internationally in areas such as truck scheduling(Zhanget al. 2020), trajectory tracking(WangandZhang 2022), and attitude control(Zamora-Cadenas,VelezandSierra-Garcia 2021), there has been little research conducted on the width of unmanned lanes in surface mines. Due to their precise sensing and localization abilities(Wanget al. 2012), driverless vehicles have a shorter perception time and stronger reaction capabilities than human drivers. This necessitates the reevaluation of traditional road design, as it may not meet the width requirements necessary for driverless vehicles. For open-pit mining, reducing the width of the flat disk and increasing the slope angle can result in significant economic benefits with the implementation of gang mining. However, there is also a certain risk to slope safety, and protecting slope stability is a prerequisite for applying the gang mining method(Postoyev,KazeevandKuchukov 2022). For open pit mines that have been put into production, the surface boundary is fixed, the upper step of the slope remains unchanged when optimization is carried out, and the lower step is pushed outward to optimize the slope angle by gang mining. For new intelligent mines, the bottom boundary can be taken as the boundary, through optimizing the width of the transportation road and increasing the slope angle of the end gang, to reduce the area of land acquisition and reduce the damage to the land excavation.
This paper optimizes surface mine transportation road width under unmanned conditions. It analyzes differences between manned and unmanned roads in surface mines to provide a basis for improving transportation efficiency and safety. An in-depth study of unmanned road width is conducted. Reducing the width of the transportation flat pan can lead to an improvement in the slope angle and decrease the average stripping ratio. Therefore, optimizing lane width with unmanned technology while ensuring slope safety can result in significant economic benefits and is a crucial technology for constructing intelligent open-pit mines.
2. Methodology
2.1. Open Pit Mine Road Width Analysis
An open pit mine roadway consists of a traveled way, a retaining wall, a protective area, and a safety width(Xiaoet al. 2023).
(1) Travel lanes. The two-lane design mainly includes two mine truck haul roads, which can ensure that two haul trucks pass at the same time; while the single-lane design has only one mine truck haul road.
(2) Retaining walls. A mound of loose stripped material with a profile pattern that is roughly an isosceles trapezoidal shape with a natural buildup.
(3) Protected area. An area that is artificially delineated and located near the inside of a hauling pan to prevent falling rock from impacting personnel and equipment and causing safety accidents, and is generally closed to traffic.
(4) Safety width. Mainly divided into two-lane type transportation road truck meeting the safety width, the safety width between the truck and the retaining wall and the width of the protective zone.
Figure 1.
Open pit end wall road. (a) Two-lane road; (b) Single-lane road.
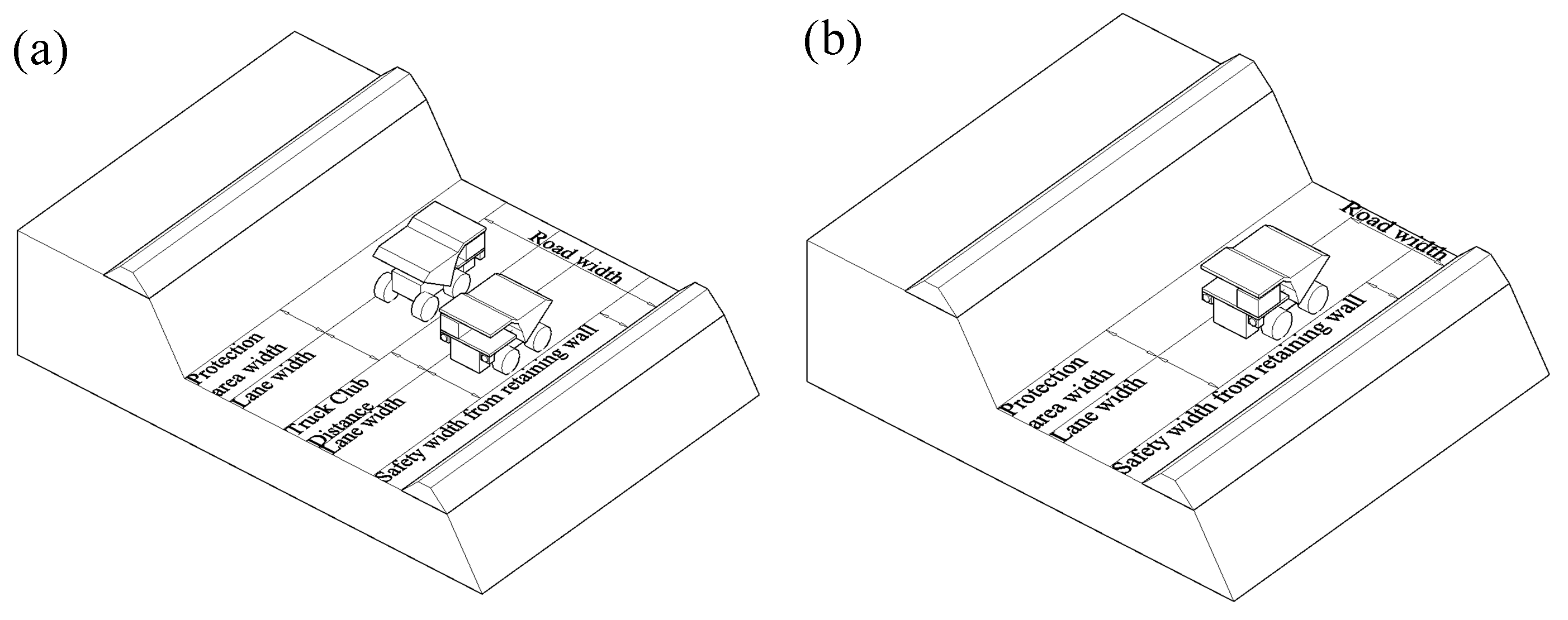
The establishment of road widths for open pit mines considers the maximum width of the diverse types of mining trucks utilized in the mine, the minimum lateral spacing when two mining trucks intersect, and the safe width of the mining trucks in relation to the road's edge. Equation (1) displays the conventional road width.
where W is the width of the road, m; l is the width of the largest type of mine truck of the open pit mine, m; dc indicates the meeting distance of two mine trucks, m; dr indicates the distance between the trucks and the edge of the road, which shall not be less than 5 m in the non-working slope, and shall not be less than 4 m in the working slope.
2.2. Driverless Road Analysis
The difference between unmanned and manned driving leads to the fact that the current open pit mine road design specifications cannot fully adapt to the requirements of future unmanned open pit mines or even mixed unmanned and manned open pit mines. Unmanned vehicle networking, remote monitoring, sensors and other technologies(Guoet al. 2023) break through the traditional mode of relying on people to perceive the environment, greatly reducing the time between the vehicle and the vehicle, the vehicle and the environment perception, which to a large extent will improve the operating speed of the vehicle, which in turn affects the adjustment of the standard for the design speed of open pit mine trucks(Yanget al. 2019); Unmanned will no longer rely on people to manipulate the vehicle, and the current unmanned environmental sensing system(Shuklaet al. 2022), vehicle positioning system(Kimet al. 2011), vehicle scheduling system(Yu 2019), behavioral decision-making system(Liuet al. 2021) and computer control system to form the entire system can already simulate or even exceed the driver's way of controlling the vehicle(Liuet al. 2022), reducing the instability and diversity of the driver's control of the vehicle, which will reduce the requirements of the width of the open pit mine transportation road; unmanned under the vehicle driving The path decision-making is completed by computer, when all vehicles including mining dump trucks and auxiliary engineering vehicles are networked, the system will analyze their destinations and road conditions to plan the best driving route, which greatly improves the waiting time for mining dump trucks stopping at mining and loading points, and improves the overall operational efficiency of the road network(Wanget al. 2022).
Based on prior analysis of the width of the road of the open pit mine end gang, the traditional open pit mine road sets a larger road width and safety distance to mitigate safety accidents caused by the mining area's unique environment, driver operational errors, driver fatigue, vehicle failure, vehicle aging, and other related issues during the production and transportation processes. The width of the road at the end of the open pit mine is affected by four main factors: humans, vehicles, the road itself, and the environment. However, driverless mine trucks are not driven by a human driver, instead, they are controlled by a variety of vehicle-mounted sensors and sensors on both sides of the road in the open pit mine. These sensors detect vehicle information and provide feedback to the control system in order to control the vehicle. Therefore, the study of unmanned lane width in open-pit mines only needs to consider the equipment parameters of unmanned mining trucks and the safe road width, without taking personnel influence into account.
2.3. Optimization of Road Width
The sensor detects information when the vehicle is deviated, and then transmits it to the processing centre. The centre subsequently sends instructions to the controller, which takes about 0.4s to control the truck's response. In comparison, a human typically takes about 1.2s after observing an obstacle and making a judgement(Zhenget al. 2014). As presented in Figure 2, the width of the unmanned road that is optimizable can be calculated by Equation (2) based on the maximum distance of the mining dump truck's lateral offset during sensor reaction time (xmax) and the maximum distance of the truck's lateral offset during the driver's reaction time (x’max).
To obtain precise transverse offset distance measurements for mining dump trucks, it's imperative to create a compliant transverse dynamics model for these vehicles, and investigate the transverse forces acting on them while steering. Due to the intricate nature of these forces, a single truck model is designed to characterise the transverse dynamics model of mining dump trucks, in order to simplify the algorithm. As a result, the transverse and longitudinal aerodynamic effects are overlooked.
From the lateral dynamics model of the vehicle shown in Figure 3, it is evident that the equations of motion for the vehicle's lateral movement can be derived.
where Fxf and Fxb represent the lateral deflection forces of the front and rear wheels respectively, θ denotes the angle of rotation of the front wheel, m signifies the mass of the vehicle, vx indicates the lateral speed of the vehicle, vy represents the longitudinal speed, and r is the transverse angular velocity.
The theory of the brush tire model suggests that there exists a linear relationship between the tire side deflection force and the side deflection angle, when the latter is less than 5°.
where the vehicle tire's lateral deflection stiffness (Cα), the wheel lateral deflection angle (α), the road surface adhesion coefficient (μ), and the tire vertical force (Fz) are all important factors to consider.
When the lateral deflection angle and slip rate of the tire are low, the resulting lateral force on the tire is proportional to the lateral deflection stiffness. Therefore, it is possible to express Fxf and Fxb in Equation (4) using Equation (5).
If the distance from the front wheel of the truck to the centre of gravity is known, as well as the vertical force Ft of the truck's tires, the truck's moment of inertia M can be calculated as follows.
The relationship between the rotational moment M and the angular acceleration β can be described as follows:
where the truck's moment of inertia is J = 5757 kg/m3.
The angular acceleration β is determined by the following equation.
Based on the instantaneous turning angle ω, the sensor response time ts, and the driver response time td, we calculate the maximum distance x of the truck's lateral deflection.
3. Results
3.1. Analysis of the Return Distance for Lateral Offset of Mining Trucks
This study presents an example of the unmanned mining dump truck modified by NTE240 of Northern Heavy Industry, which is employed in the Shengli West No.1 open-pit coal mine of Guoneng Beidian Shengli Energy. A lateral dynamics model of the NTE240 mining dump truck is established, with relevant parameters presented in Table 1.
A truck tire model in Trucksim has been used to determine the relationship between the tyre droop force and the side deflection force of the truck front wheel for a given angle of side deflection. The small wheel offset angle during regular straight line vehicle motion contrasts with the substantial vertical force the NTE240 mining dump truck's tire endures when supporting its own weight. Figure 4 demonstrates the truck deflects during typical driving with the vehicle side deflection force ranging from 200 kN to 350 kN.
From Table 1 it is clear that the centre of gravity of the truck is 3.27 m from the centre of the front axle when unladen, and the moment of the front wheels is also known.
The maximum distance xmax of the lateral offset of the mining dump truck during the sensor reaction time and the maximum distance x’max of the lateral offset of the truck during the driver reaction time can be determined as x’max=1960 mm and xmax=217 mm, respectively. According to Equation (2), the width of the road of the unilateral transport flat plate of the autonomous vehicle that can be optimized for reduction can be calculated as xop=x’max-xmax=1743 mm.
3.2. Economic Benefits of Driverless Road Building
The paper's case study examines Shengli West No.1 Surface Coal Mine, situated 5 km north of Xilinhot City, Xilingol League, Inner Mongolia Autonomous Region. The coal seams in this surface mine have a dip angle of less than 5°, and the primary seams are the No.5# and No.6# seams. The No.5 seam has an average recoverable thickness. The first mining area hosts the No.5# and No.6# seams with average thicknesses of 15.6 m and 32.23 m respectively, while the latter is 31.4 m at the same area. A total of 13 stripping steps and 5 mining steps are present with the height of stripping steps being 15 m and 10 m or 15 m. All findings are based on the extraction of the non-grainy coal seams. The 6# coal seam in the initial mining region has an average thickness of 32.23 m, while the average thickness of 6# coal seam in the same area is 31.4 m. The height of stripping steps here stands at 15 m, whereas coal mining steps have heights of 10 m and 15 m. Presently, there are 13 stripping steps and 5 coal mining steps. The transport equipment available for use mainly includes 91 t, 108 t, and 220 t mining dump trucks, with over 50 220 t dump trucks being operational.
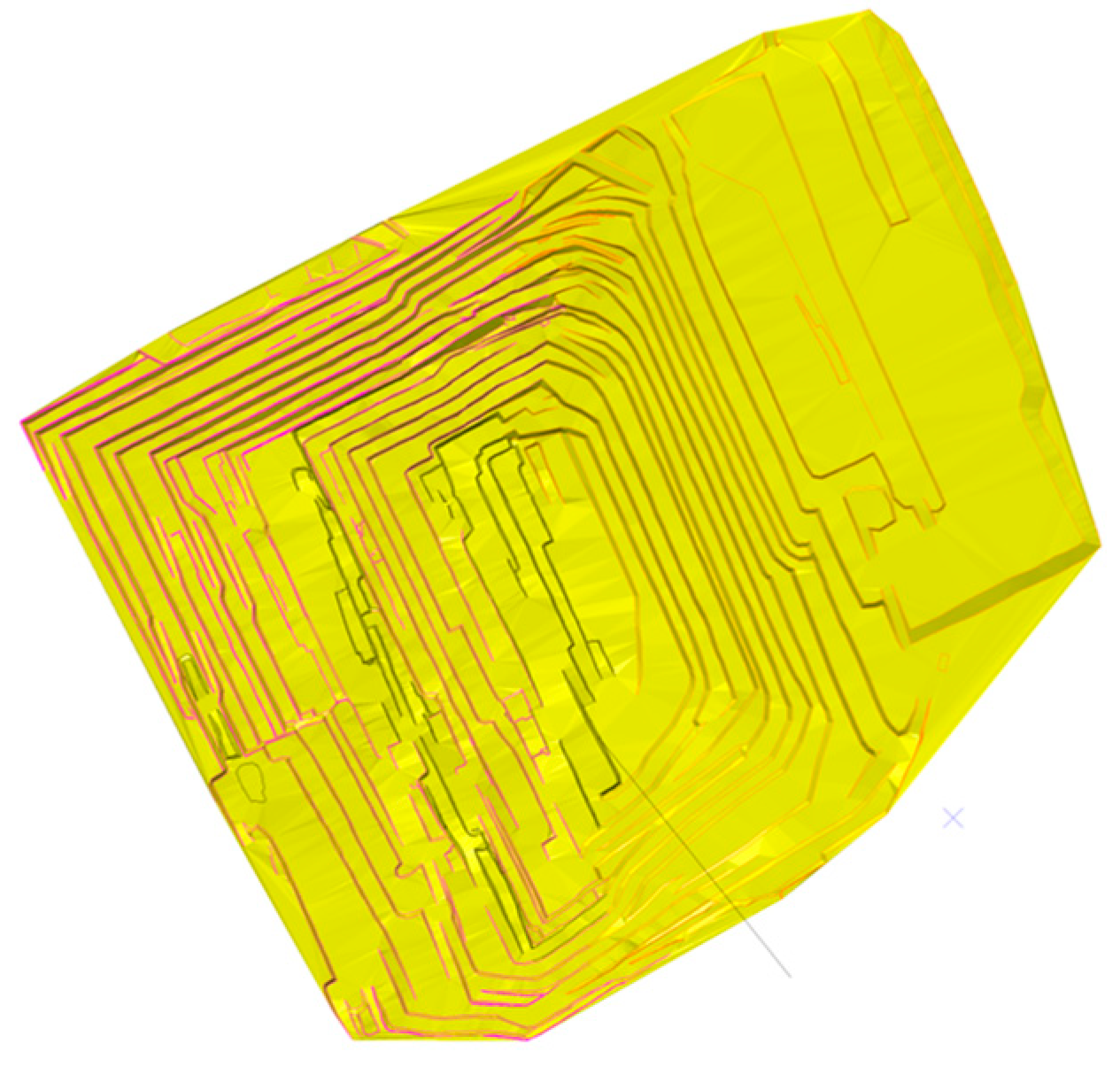
Figure 5.
Shengli West No. 1 open-pit mine 3D diagram.
The previously calculated xop only represents the optimized width of the single lane and single side of the mining truck. Therefore, the optimized width of the road surface for dual vehicles is xd=4xop=6.972 m and the optimized width for single-vehicle road surfaces is xs=2xop=3.486 m. The average length of the southern slope at Shengli West No.1 Openpit Coal Mine is 1000 metres. The optimized transportation road width is utilized to determine the profile structure of the southern slope following lane compression according to the "Preliminary Design Specification for 2800 Mt/a Shengli Energy Shengli No.1 Openpit Coal Mine" on the division of steps along the south slope road. As shown in Figure 6, after optimisation of the end gangway width, the stripping volume is 3,273,500m3, the coal production volume is 2,496,280t and the stripping ratio to the gangway is 1.31 m3/t.
Based on the lithology of the Shengli West No.1 open pit coal mine stratum, this paper analysed the stability of the south slope before and after optimisation. Table 2 illustrates the physical and mechanical properties of the slope rock body during the stability analysis of the open-pit mining slope.
Based on the stratigraphic structure of the south slope and the principle of limit equilibrium, a two-dimensional stability analysis method was employed to examine the landslide modelling of slopes. The resulting analysis shows the location of the potential sliding surface and the extent of the sliding body throughout the slope.
The stability of the south slope profile was analysed using the Morgenstern method in conjunction with slope stability analysis software SLOPE/W. The impact of mining dump truck loading on slope stability was also taken into account to identify the most hazardous sliding surface of the south slope. The results of the slope stability analysis are presented in Figure 7.
According to the "Coal Industry Surface Mine Slope Engineering Design Code" (GB51289-2018), non-working gang slopes with a less than 10-year service life must have a stability coefficient of at least 1.10. Figure 7 shows that both pre-optimisation and post-optimisation slope stability coefficients exceed the required specifications, indicating that the south wall are stable.
4. Discussion
The current unmanned technology is an important means for the intelligent construction and development of mines, and it is also one of the long-term research topics of mines. Especially in the open pit mining scenario, the application of driverless technology has played a good effect on many aspects of open pit mine construction, production, safety and so on. Many experts and scholars focus on the driverless vehicles can improve the transportation efficiency, the establishment of real-time dynamic road network and other aspects of production and transportation, as well as driverless vehicles can avoid obstacles, identify obstacles, emergency braking and other aspects of safety, but very few people have made a study of the impact of driverless vehicles on the construction of open-pit mine roads. This paper has a good complementary effect on the construction of driverless roads in surface mines.
Through the model analysis of manned and unmanned driving, it is proposed that the difference between unmanned roads and manned roads lies in whether or not there are personnel involved, and it is clarified that personnel, vehicles, roads and environment are the four key factors affecting the construction of open pit mine transportation roads, while the factor of personnel is removed from the unmanned roads, so when comparing the differences and similarities between unmanned roads and manned roads, it can be found that the main thing is that the traveling The attributes of the vehicle on the road have changed, that is, the driver-operated vehicle has become a system-operated vehicle, while the road and the environment have not changed. Therefore, our research on driverless road construction is mainly realized by studying driverless vehicles.
The road width is typically determined by the vehicle width and necessary safety distances. In open pit mines, truck width is easily determined; the primary concern is the safety distance on the traveled way. According to our research, the safe distance for a truck to travel on a road is determined by objectively assessing lateral deflection during travel. As a result, we derived an equation to estimate the maximum lateral offset distance based on the offset angle and speed at which the truck is travelling. We achieved this by conducting a mechanical analysis of the truck's lateral offset. Using the modified NTE240 unmanned mining dump truck as examples, we optimized the unmanned road width and restructured the end gang road while ensuring stability, resulting in significant benefits.
In contrast to other studies, our study focuses on the reaction time differences between manned and unmanned vehicles when perceiving lateral offsets, without taking into account other factors. Furthermore, this study is biased towards the mechanical analysis of truck lateral deflections and does not include field practice in this area. In the future, when researching the influence of driverless technology on the building of open-pit mine transportation roads, we can investigate mechanical analysis, numerical simulation, field practice, and additional factors.
The design of the road width for transporting in open pit mines depends on truck size, terrain conditions, transport operations, safety, efficiency, and other factors. The optimal road width for safe truck operation requires careful consideration of various factors. This includes the distance and safety clearance between two passing vehicles, as well as the driver's reaction time and speed. Additionally, the road's terrain and slope, vehicle weight distribution, and other factors should be factored in. To ensure safe transportation in open pit mines, further research is needed to determine the ideal road width while accounting for these factors.
This study offers technical assistance for building unmanned transportation roads in open-pit mines, demonstrating its practical application and potential economic benefits for constructing intelligent mines in existing sites. Further research is recommended to consider surface conditions and environmental factors affecting open-pit mine transportation roads.
5. Conclusions
Based on the research, the following conclusions are presented:
- 1)
- Driverless vehicles have precise sensing and positioning capabilities, with shorter sensing times and stronger reactive capabilities than human drivers. It is clear that autonomous vehicles can potentially offer a significant advantage over human-driven vehicles in terms of capability and efficiency. Analyzing differences between manned and unmanned roads in open-pit mines, we drew the lateral offset-back distance curve of mining dump trucks, using response time of sensors and drivers as independent variables. This curve reflects that corrective distance for manned driving is greater compared to that of unmanned driving.
- 2)
- A model for the dynamics of lateral offset in vehicles has been created to examine the lateral forces on a truck during offset steering. By analyzing the Northern Heavy Industries NTE240 self-driving mining dump truck as an example, it was discovered that the width of the road of the unilateral transport flat plate of the autonomous vehicle that can be optimized for reduction can be calculated as xop=x’max-xmax=1743 mm.
- 3)
- Using Shengli West No.1 open-pit mine as a case study, this paper optimizes the slope of the south gang and calculates the resulting economic benefits of gang mining. The optimization results in a stripping volume of 3,273,500 m3, a coal mining volume of 2,496,280 t, and a stripping ratio of 1.31 m3/t. The analysis examined the slope stability of the southern section before and after optimization with the impact of truck loading. The slope stability of the gang post-mining is 1.231, satisfying the specifications and confirming the benefits of optimization.
Acknowledgments
This word was financially supported jointly by the National Natural Science Foundation of China (52374144).
Conflicts of Interest
The authors do not have any conflict of interest with other entities or researchers.
References
- D. BellamyandL. Pravica. 2011. Assessing the impact of driverless haul trucks in Australian surface mining. RESOURCES POLICY 36(2). 149-158. [CrossRef]
- D. J. Kim,J. I. Bae,K. S. Lee,D. S. Lee,Y. J. LeeandM. H. Lee. 2011. Position Recognition System of Autonomous Vehicle via Kalman Filtering. PROCEEDINGS OF THE SIXTEENTH INTERNATIONAL SYMPOSIUM ON ARTIFICIAL LIFE AND ROBOTICS (AROB 16TH '11), edited by M. Sugisaka,H. Tanaka. 16th International Symposium on Artificial Life and Robotics (AROB 16th '11).
- D. Wang,S. T. Zheng,Y. X. RenandD. J. Du. 2022. Path Planning Based on the Improved RRT* Algorithm for the Mining Truck. CMC-COMPUTERS MATERIALS & CONTINUA 71(2). 3571-3587. [CrossRef]
- D. Xiao,Z. L. Yan,J. Li,Z. M. Gu,Y. H. FuandL. Y. Yin. 2023. Road Extraction From Point Clouds of Open-Pit Mine Using LPFE-Net. IEEE GEOSCIENCE AND REMOTE SENSING LETTERS 20. 2023. [CrossRef]
- F. WangandZ. F. Zhang. 2022. Route Control and Behavior Decision of Intelligent Driverless Truck Based on Artificial Intelligence Technology. WIRELESS COMMUNICATIONS & MOBILE COMPUTING 2022. [CrossRef]
- G. I. Ahumada,J. D. PintoandO. Herzog. 2021. A Dynamic Scheduling Multiagent System for Truck Dispatching in Open-Pit Mines. AGENTS AND ARTIFICIAL INTELLIGENCE, ICAART 2020, edited by A. P. Rocha,L. Steels,J. VanDenHerik. 12th International Conference on Agents and Artificial Intelligence (ICAART).
- G. P. Postoyev,A. I. KazeevandM. M. Kuchukov. 2022. The Coulomb-Mohr Law and the Change in the Stress-Strain State of a Landslide Prone Mass. DOKLADY EARTH SCIENCES 507(SUPPL 1). S216-S224. [CrossRef]
- H. T. Liu,W. B. Pan,Y. Q. Hu,C. Li,X. W. YuanandT. Long. 2022. A Detection and Tracking Method Based on Heterogeneous Multi-Sensor Fusion for Unmanned Mining Trucks. SENSORS 22(16). [CrossRef]
- JJQ Yu. 2019. Two-Stage Request Scheduling for Autonomous Vehicle Logistic System. IEEE TRANSACTIONS ON INTELLIGENT TRANSPORTATION SYSTEMS 20(5). 1917-1929. [CrossRef]
- L. Zamora-Cadenas,I. VelezandJ. E. Sierra-Garcia. 2021. UWB-Based Safety System for Autonomous Guided Vehicles Without Hardware on the Infrastructure. IEEE ACCESS 9(96430-96443. [CrossRef]
- P. K. Wang,P. A. Torrione,L. M. CollinsandK. D. Morton. 2012. Rapid Position Estimation and Tracking for Autonomous Driving. UNMANNED SYSTEMS TECHNOLOGY XIV, edited by R. E. Karlsen,D. W. Gage,C. M. Shoemaker,G. R. Gerhart. Conference on Unmanned Systems Technology XIV.
- Q. Liu,X. Y. Li,S. H. Yuan,Z. R. LiandIEEE. 2021. Decision-Making Technology for Autonomous Vehicles: Learning-Based Methods, Applications and Future Outlook. 2021 IEEE INTELLIGENT TRANSPORTATION SYSTEMS CONFERENCE (ITSC), edited by. IEEE Intelligent Transportation Systems Conference (ITSC).
- R. C. Zheng,K. Nakano,S. Yamabe,M. Aki,H. NakamuraandY. Suda. 2014. Study on Emergency-Avoidance Braking for the Automatic Platooning of Trucks. IEEE TRANSACTIONS ON INTELLIGENT TRANSPORTATION SYSTEMS 15(4). 1748-1757. [CrossRef]
- S. Shukla,S. Kasarapu,R. Hasan,PDS Manoj,H. Y. ShenandIEEE. 2022. UBOL: User-Behavior-aware One-Shot Learning for Safe Autonomous Driving. 2022 FIFTH INTERNATIONAL CONFERENCE ON CONNECTED AND AUTONOMOUS DRIVING (METROCAD 2022), edited by. 5th International Conference on Connected and Autonomous Driving (MetroCAD).
- S. Zhang,C. W. Lu,S. Jiang,L. ShanandN. N. Xiong. 2020. An Unmanned Intelligent Transportation Scheduling System for Open-Pit Mine Vehicles Based on 5G and Big Data. IEEE ACCESS 8(135524-135539. [CrossRef]
- W. W. Yang,J. Yang,JJY LiangandN. Zhang. 2019. Implementation of velocity optimisation strategy based on preview road information to trade off transport time and fuel consumption for hybrid mining trucks. IET INTELLIGENT TRANSPORT SYSTEMS 13(1). 194-200. [CrossRef]
- X. F. Wo,G. C. Li,Y. T. Sun,J. H. Li,S. YangandH. R. Hao. 2022. The Changing Tendency and Association Analysis of Intelligent Coal Mines in China: A Policy Text Mining Study. SUSTAINABILITY 14(18). [CrossRef]
- X. L. Xu,Z. Wang,P. L. Huang,S. C. TianandL. Bi. 2023. Open-Pit Map: An HD Map Data Model for Open-Pit Mines. APPLIED SCIENCES-BASEL 13(23). [CrossRef]
- Z. Z. Guo,F. Liu,Y. Z. Shang,Z. LiandP. Qin. 2023. Longitudinal and lateral stability control for autonomous vehicles in curved road scenarios with road undulation. ENGINEERING COMPUTATIONS 40(9/10). 2814-2840. [CrossRef]
Figure 2.
Lateral offset back to positive curve.
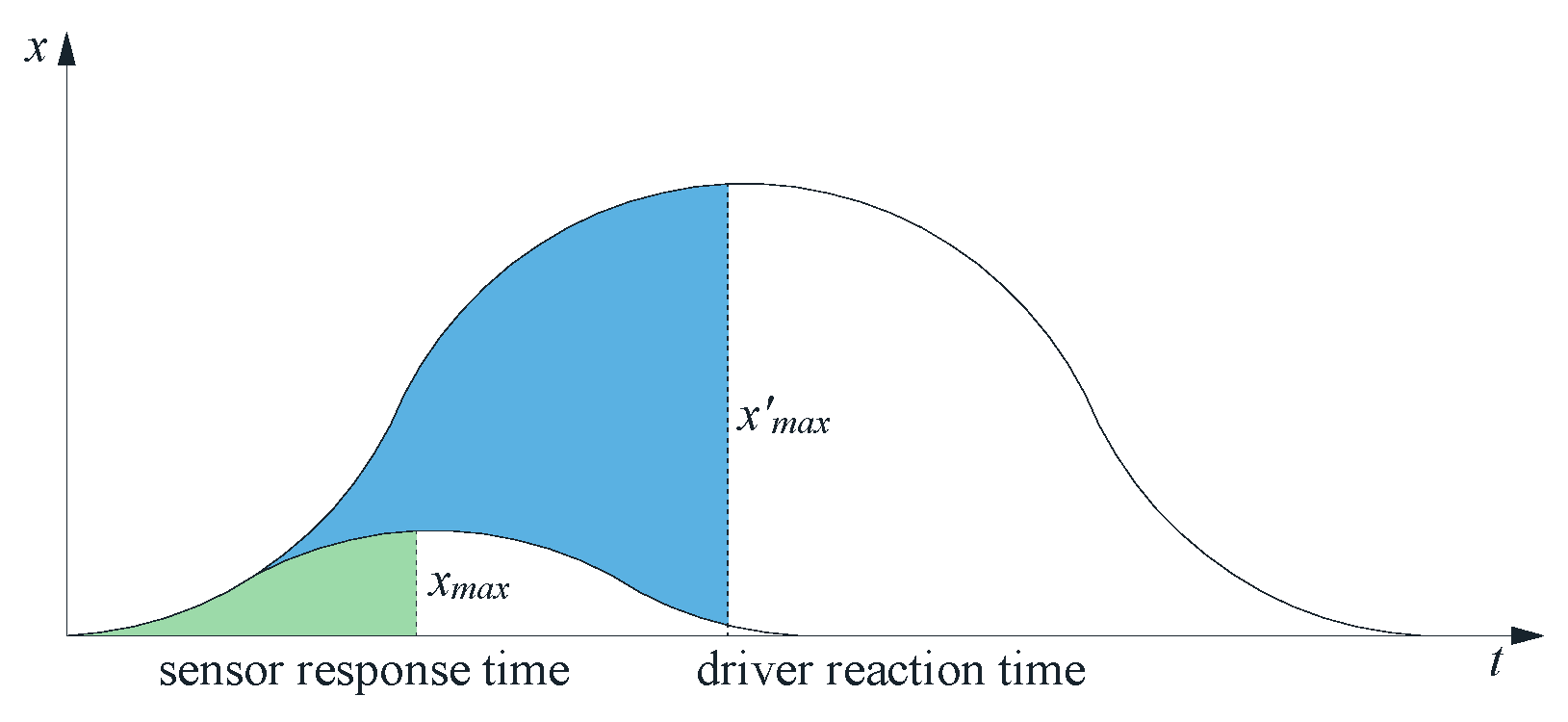
Figure 3.
Lateral dynamic model.
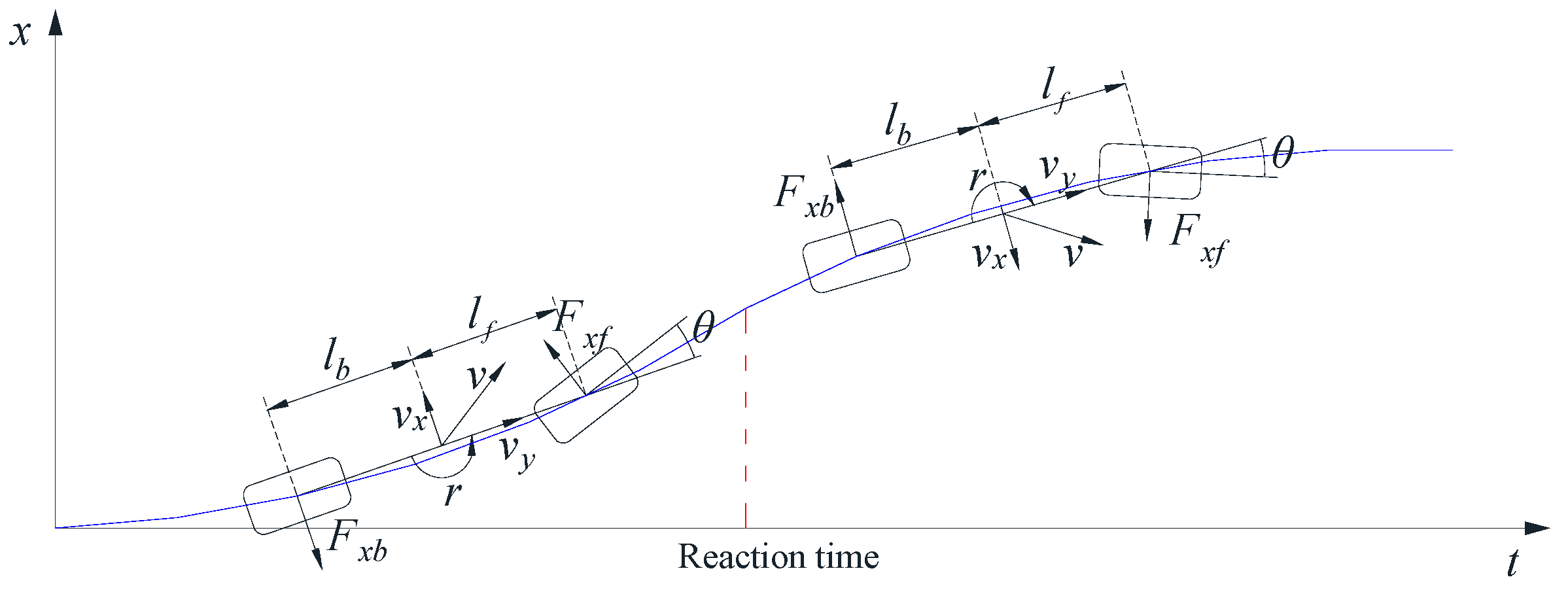
Figure 4.
Tire model in Trucksim.
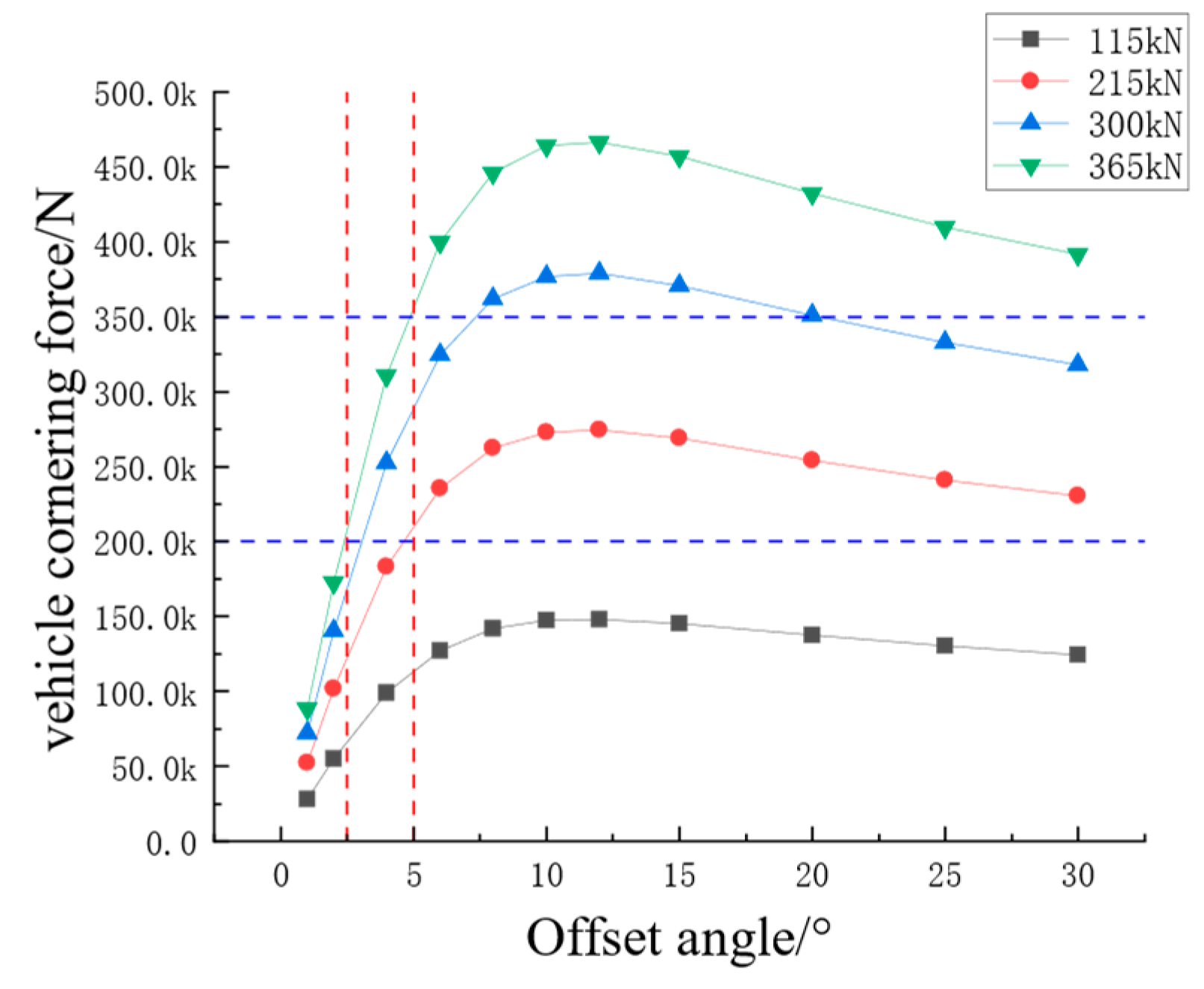
Figure 6.
Road width optimization of the south end slope.
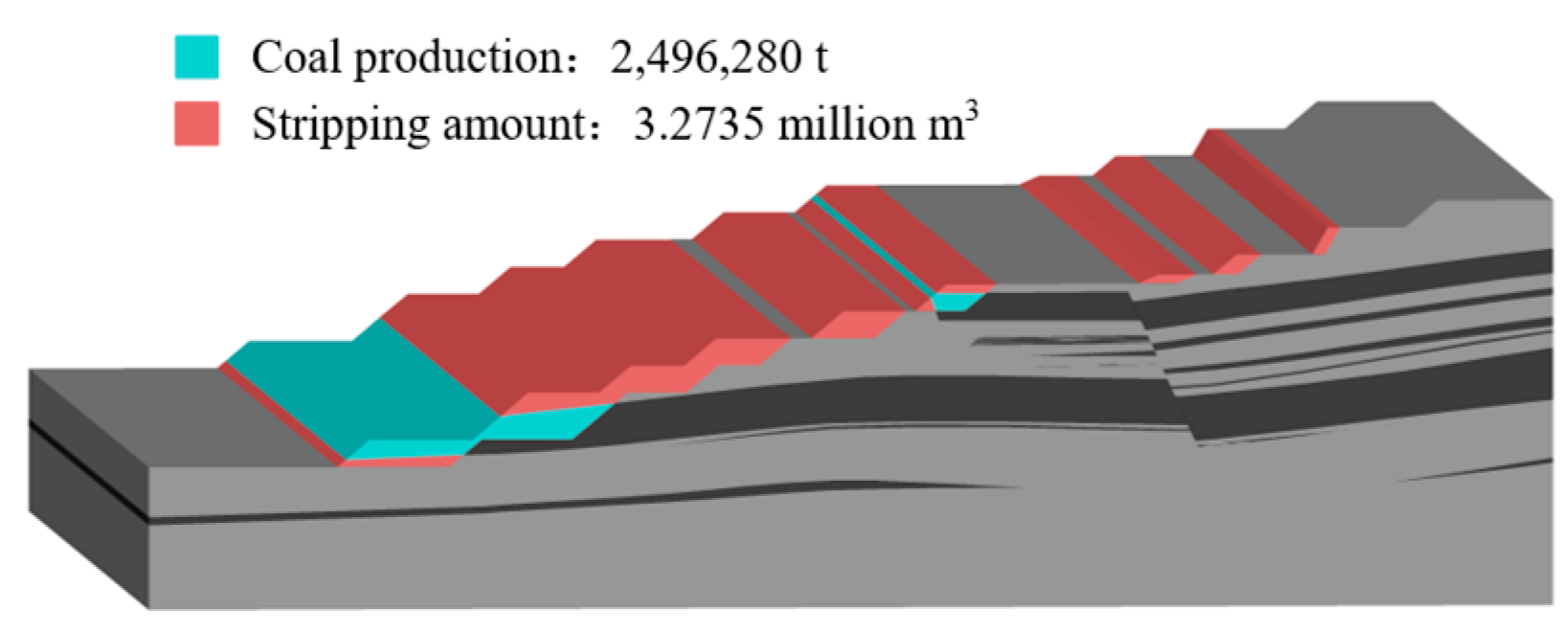
Figure 7.
South Slope stability analysis. (a) original slope; (b) optimized slope.
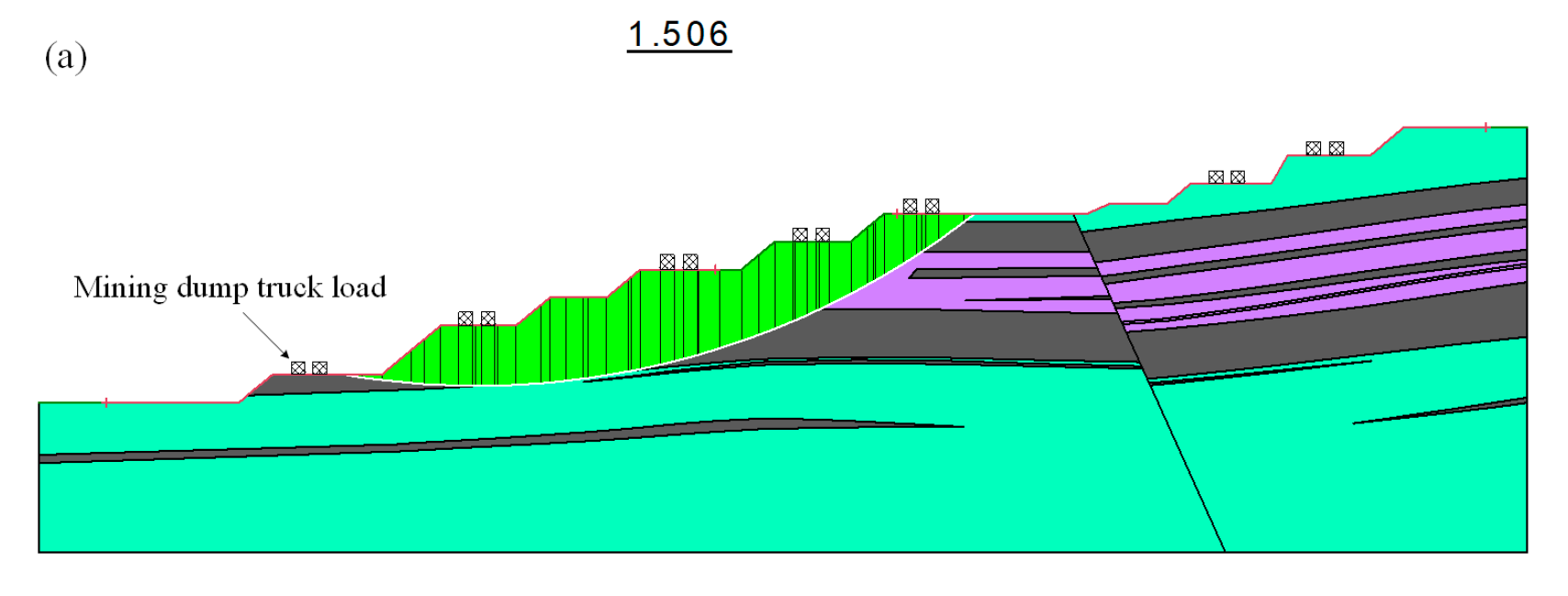
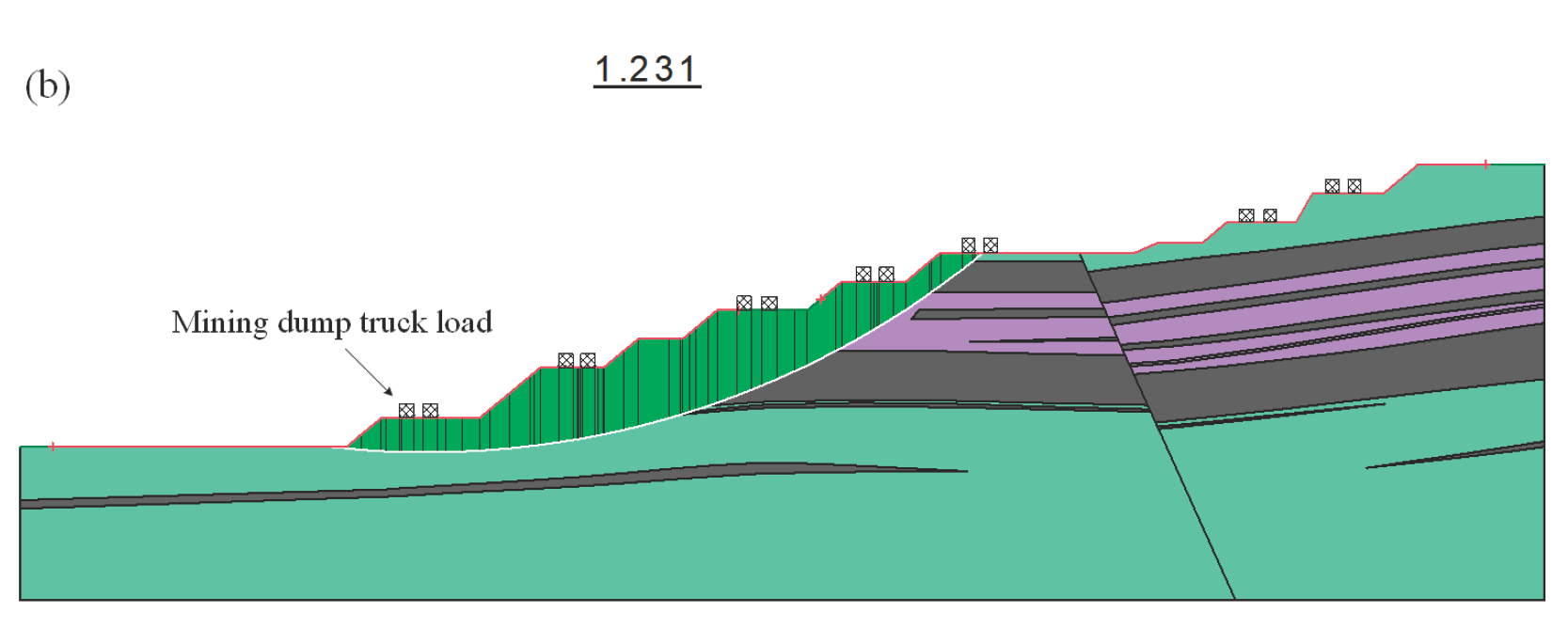

Table 1.
Technical parameters of NTE240 mining truck.
| Description | Value |
| Rated load capacity | 220~236 t |
| Loading volume | 114 m³ |
| Max. speed | 64 km/h |
| Min. turning radius | 15.2 m |
| Loading height | 6600 mm |
| Overall length | 14 800 mm |
| Overall width | 7 640 mm |
| Total height | 7 300 mm |
| Unladen mass | 150 t |
| Distance from the center of the front axle to the center of mass | 3.27 m |
| Distance from center of shaft to center of mass after no load | 2.93 m |
Table 2.
Rock mass Physical and mechanical parameters.
| Rock Formation | Cohesion/ kPa | Internal friction angle/ ° | Density/ kN∙m-3 |
| Quaternary | 18 | 22~24 | 16.5 |
| Mudstone | 20 | 20~22 | 19.3 |
| Siltstone | 50 | 24~26 | 20.3 |
| Coal | 40 | 22~27 | 13.8 |
| Mudstone sandstone interbedded | 20 | 20~23 | 20.0 |
| Middle conglomerate | 15 | 22~24 | 21.0 |
| Siltstone mudstone | 20 | 21~23 | 20.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



