Submitted:
16 January 2026
Posted:
19 January 2026
You are already at the latest version
Abstract
Does structure and parameter determine function in complex coupled oscillator systems? Conventional theory of synchronization stability is built upon this premise, relying crucially on knowledge of network topology and system parameters. We challenge this view by discovering a universal synchronization stability boundary defined solely by the states of oscillators, which is independent of configuration (encompasses both the interaction topology and oscillator parameters). Through exhaustive validation in two disparate test systems and rigorous mathematical proof, we demonstrate that this boundary is rooted in physical reality, not in any specific model. Furthermore, a novel type of spontaneous synchronization, a non-equilibrium critical phenomenon, has also been discovered near this boundary and likewise exhibits configuration-independence. These findings challenge the structural basis of the synchronization stability boundary (a key function) on complex networks. They demonstrate that the loss of synchronization stability is governed by an intrinsic, configuration-independent critical condition. Consequently, our work challenges the theoretical foundation of the “from configuration to function” principle for predicting collective behaviors in complex systems.
Keywords:
complex network
; spontaneous synchronization
; synchronous stability boundary
Introduction
The collective behavior of coupled nonlinear oscillators, from neuronal firing to power grids, is governed by synchronization [1]. A foundational premise across physics and network science holds that predicting the stability limit (a key function of interacting networks) of synchronized states requires detailed knowledge of the system’s configuration: its network topology and individual parameters [2,3,4] (in this paper, the term “configuration” is used to encompass both network topology and parameters). This view that “structure determines function” is more than just a philosophical concept, and it serves as the cornerstone for constructing analytical frameworks ranging from master stability functions to Lyapunov methods [2,4].
We confront a deeper, often unasked question: Is this reliance on structural details a necessary path, or a deeply ingrained methodological constraint? Can the critical point of synchronous collapse be determined by more fundamental principles? Furthermore, what might the form of such principles be? These questions strike at the heart of the prevailing paradigm in complex science [5].
If this premise is indeed necessary, any prediction of synchronization stability should be impossible without such structural details. To test this, we depart from conventional model-based analysis and pose a radically different question: could the synchronization stability boundary possess a universal form, derivable not from configuration, but directly from observable physical quantities? We searched for an answer not in more complex models, but in the basic physics of synchronization, focusing on the key physical quantities: oscillator amplitudes and frequencies.
Guided by this quest, we combined physical intuition with the analysis of simulation data and geometric analogies to phasor diagrams (Appendix B). This approach led to the discovery of an elegantly simple candidate equation. Initially, it was merely a phenomenological observation. However, through exhaustive numerical experiments across two topologically and parametrically disparate test systems, this equation demonstrated flawless discriminatory power. More profoundly, rigorous mathematical proofs (Appendices D and E) establish that this boundary is rooted in physical reality, thereby confirming its universality.
The defining feature of this boundary is that its mathematical form contains no terms pertaining to network adjacency matrices, coupling parameters, or individual oscillator parameters. It is strictly independent of both network topology and system parameters. Its profound implication is that configurations traditionally regarded as indispensable have instead introduced methodological complexity.
Furthermore, near this configuration-independent boundary, we observe the emergence of a spontaneous synchronization layer, a non-equilibrium critical phenomenon whose position is likewise independent of configuration. This phenomenon, exhibiting clear signatures of a non-equilibrium critical phase transition, strongly suggests that the stability of synchronization is intrinsically linked to such criticality.
Therefore, our findings prompt us to re-examine a long-standing assumption that knowledge of configuration is a prerequisite for predicting the functional limits of coupled dynamical systems. By demonstrating that a key function—the boundary of synchronous stability—can be accurately determined while systematically ignoring the underlying network topology and system parameters, we challenge the core of traditional paths in complexity science: “from configuration to function.” This work moves away from the mainstream approach of deducing stability from a complete configuration description (typically difficult to obtain) of the system, and turns toward an emerging perspective that discovers universal laws of synchronous stability directly from observable physical quantities.
Boundary Equation and Its Verification
What makes the synchronization critical state so special [4,6,7]? Our reflection on this problem culminated in the identification of an elegant equation (see Appendix B for details). This equation is used to describe the synchronization stability boundary:
In Equation (1), denotes the oscillation amplitude (corresponding to the voltage in power systems) of the Kth oscillator, and denotes the angle difference between and . Here, denotes the angle of frequency of Kth oscillator (not the phase angle), and synchronization corresponds to . denotes the angular frequency of Kth oscillator (corresponding to the generator in power systems) and is the common frequency of the system.
The mathematical simplicity of Equation (1) contrasts with the depth of its physical implication.It reveals a counterintuitive fact: deriving the synchronization stability boundary does not necessarily require configuration information, such as network topology or parameters, as anticipated by conventional frameworks [4,8]. Instead, it is determined solely and entirely by the observable physical quantities (amplitude and frequency) of a pair of oscillators. This suggests that the synchronization may be a phase transition process governed by fundamental principles, independent of the configuration. Our subsequent verification aims to demonstrate the universality of this conjecture, not merely the accuracy of Equation (1) within a specific model.
As will be shown through validation and later interpreted, this boundary embodies a profound physical principle: that synchronization emerges when the suppression (of the loss of synchrony) dominates the dissimilarity [6]. Strictly speaking, this equation defines the boundary of the physically admissible domain—that is, the boundary of the region in which a synchronized state can stably exist (see appendix D). In this paper, we interpret this physically admissible domain as representing the system’s synchronization stability region. This explanation is reasonable for two reasons: 1) physical admissibility precedes stability; 2) for coupled oscillator system (Taking the power system as an example), our experiments confirm that the two boundaries are indistinguishable in all tested scenarios.
Equation (1) presents a boundary for a pair of oscillators. For multi-oscillator systems, since all boundary equations of pairs of oscillators share identical forms, the visualized graphs completely coincide, as shown in Figure 1(a). It is crucial to note, however, that the interactions among multi-oscillators are inherently higher order [9]. To apply and validate this boundary to multi-oscillator systems, we employ a mathematical transformation (Equation S2 in the Supplemental Material [10]) that maps these higher-order interactions into pairwise interactions between meta-oscillators. The meta-oscillator is the direct result of this transformation, and its successful application (as detailed in Figure 1 and Figure 2) demonstrates its effectiveness as a reduction method for stability assessment based on the boundary. Unlike the oscillator system, for the Kth and the Lth meta-oscillator, L=K+1. Unlike the oscillator perspective (Figure S2 in the SM [10]), the meta-oscillator framework endows the “synchronization stability” relation with the property of an equivalence class. This crucial property thereby provides a rigorous foundation for analyzing synchronization stability at the subsystem level and for investigating phenomena such as partial synchronization (Figures 1(b) and 2(a)).
Critically, we prove that this transformation preserves synchronization stability (see appendix F), which ensures a strict equivalence in the stability states between the oscillator and meta-oscillator systems. This equivalence establishes a powerful validation framework: demonstrating that the stability boundary correctly classifies the meta-oscillators (Figure 1 and Figure 2) directly confirms its validity for the original oscillator system. This reduction algorithm has no direct connection to specific physical scenarios, and therefore can be applied directly across different disciplines: biological systems and neuroscience, and economy and social sciences [1].
To test the boundary, a test system (10-oscillator) was used. A strong perturbation occurred at 18-node. The data in Figure 1 are obtained from numerical simulation experiments designed to validate Equation (1). represents the perturbation duration, and denotes the step length typically used in oscillator system studies.
(a). Visualization of the stability boundary. The stability boundary in Equation (1) (blue surface and dark green plane) and the pink planes , and collectively define the boundaries and enclose the stability domain. The identical boundary form enables a unified stability assessment.
(b). Synchronization stability and partial synchronization. represents the three-dimensional (3D) coordinate point formed by the Kth and Lth meta-oscillators. are calculated via Equations (S3) and (S4). At perturbation duration , all coordinate points cluster near the boundary (cyan). At , three coordinate points [,, and ] deviate outside the boundary, whereas the others remain clustered near it (magenta). The position of the point relative to the boundary directly diagnoses the synchronization state.
(c). Tracking the onset of desynchronization. The temporal trajectory of coordinate point is shown for the unstable case (). The calculation range is . Each cyan point represents the mean position of for a period of 1 second. The time T and the time interval are defined in Equation (S5). The trajectory crosses the stability boundary outwardly [(7 s, 8 s)], preceding a rapid increase in the angle difference [(9 s,10 s)]. The outward crossing of a trajectory across the boundary pinpoints the onset of synchronization loss.
(d) and (e). Experimental validation of the stability ( and ). The horizontal axis represents the time. The vertical axis represents the value of . The maximum value is represented by (magenta), and the minimum value is represented by (cyan). In the stable case (), , indicating sustained synchronization. In the unstable case (), increases sharply after 9 s (), confirming system desynchronization.
(f). Experimental verification of partial synchronization. . Meta-oscillator 1 (cyan line) desynchronizes after ~9 s, followed by meta-oscillators 2 (orange dashed line) and 10 (magenta line). Meta-oscillators 3~9 form a synchronized cluster (green lines). This pattern matches the cluster prediction from the spatial distribution in (b).
Figure 1(a) visualizes Equation (1) within a three-dimensional (3D) coordinate system. Geometrically, the surfaces defined by Equation (1) are fixed, which provides an intuitive indication of its independence from network topology and system parameters. We now proceed to validate this conclusion experimentally. Three lines of evidence confirm that Equation (1) universally describes the synchronization stability boundary: 1) it distinguishes stable from unstable states [see Figure 1(b) and 2(a)], 2) it captures the stability of multiple swings [see Figure 1(c) and 2(b)], and 3) it explains partial synchronization patterns [see Figure 1(f) and 2(e)].
The boundary provides a definitive geometric criterion for oscillator system stability. For a system with n meta-oscillators, the state is represented by n-1 points in a 3D coordinate space. As shown in Figure 1(b), a minute increase in perturbation duration from to , a change of merely 0.001 s, causes a dramatic shift in system behavior. Under stable conditions (, cyan), all points cluster at the boundary, whereas at the instability threshold (, magenta), specific points (,, and ) deviate outside it. This spatial deviation is the direct geometric manifestation of the condition , signifying a loss of synchronization. The definitive correspondence between a point’s position relative to the boundary and the synchronization is rigorously validated by time-domain simulations: the clustering of cyan points coincides with a bounded difference in in Figure 1(d), whereas the deviation of magenta points from the boundary predicts the large, growing desynchronization evident in Figure 1(e). These results reveal the boundary’s powerful discriminating capability for synchronization stability, a capability rooted in the mathematical proof (Appendix D). Another key piece of evidence is that the value of at differs significantly from that at in Figure 3(a). The reproducibility of this exact discriminative function in the topologically distinct 3-oscillator system (Figure 2(a), (c) and (d)), along with analogous results under varied perturbation scenarios (Figure S5 in the SM [10]), provides robust, multiscenario evidence that the boundary’s role as a stability criterion is an inherent property, independent of the configuration or perturbation. To thoroughly validate the universality of the boundary equation, we conducted tests on all 39 nodes of the test system (10-oscillator) (Table S1 in the SM [10] for details). Across all 78 stable and unstable cases, Equation (1) achieved discrimination with an accuracy of 100%.
Furthermore, Figure 1(b) provides a novel and direct geometric diagnosis of partial synchronization. The positions of the 9 coordinate points reveal distinct synchronization clusters. Specifically, points , , and residing outside the boundary indicate that the corresponding meta-oscillators (1st, 2nd, and 10th, respectively) have lost synchronization stability. This result effectively divides the system into four synchronization groups: three desynchronized individual units (1st, 2nd and 10th) and one synchronized cluster comprising meta-oscillators 3rd through 9th. The time-domain results in Figure 1(f) are in perfect agreement with this diagnosis, confirming the manifestation of cluster synchronization [12]. Our approach thus offers a unified geometric interpretation for this phenomenon: cluster synchronization arises from the localized loss of synchronization stability between oscillators when their representative coordinate points lie outside the universal boundary. This is far simpler than traditional solutions [13,14]. This mechanism, which improves our understanding of partial synchronization, is further corroborated by additional data (Table S1 in the SM [10]). Critically, this diagnostic framework is applicable in the completely different test system (3-oscillator), as demonstrated by the consistent combination of geometric diagnosis in Figure 2(a) and time-domain validation in Figure 2(e).
Figure 1(c) captures the system’s transition from stability to instability, showing coordinate point crossing the boundary outwardly during the time interval (8 s,9 s). This event is the direct precursor to the subsequent physical response: a dramatic increase in the angle difference during (9 s,10 s), which leads to the eventual loss of synchronization, as confirmed by the time-domain simulation in Figure 1(E). The consistent temporal sequence—boundary crossing preceding desynchronization—establishes that this crossing marks the real-time onset of synchronization loss. This demonstrates the capability of boundary to distinguish complex stability phenomena in multiple oscillators. Such phenomena represent an interdisciplinary concept spanning multiple issues including “multiple timescales,” “nonlinear dynamical processes” and “stability” [15,16,17,18]. Critically, this entire sequence of events, from boundary crossing to desynchronization, is replicated in the completely different system (3-oscillator) (Figure 2(b) and (d)), underscoring universality of the predictive power across configurations. Furthermore, the indispensability of the amplitude term in this configuration-independent boundary demonstrates that ignoring amplitude dynamics [19], while useful in many contexts, precludes the discovery of the universal stability condition reported here. Ultimately, the synergy between the long-term stability assessment in Figure 1(b) and the short-term transient prediction in Figure 1(c) confirms that the same boundary equation governs stability across different time scales and operational scenarios. This coherence underpins a unified framework for synchronization stability analysis in oscillator systems.
The same analysis as in Figure 1 is applied to another test system (3-oscillator). A strong external perturbation occurred at the 4-node.
(a). Synchronization stabilization discrimination and partial synchronization. Two coordinate points cluster at the boundary when stable (, cyan dots). is outside the boundary and away from when unstable (, magenta dots).
(b). Stability of multiple swings for multiple oscillators. . Mirroring the dynamics in Figure 1(c), crosses the boundary outwardly in the time interval , and rapidly increases in the time interval. These findings are in good agreement with the results presented in Figure 2(d).
(c) and (d) show the experimental validation of the synchronization stability and the stability of multiple swings for multiple oscillators. The time-series data corroborate the state predictions in (a), showing maintained synchrony at () and loss of synchrony at ().
(e). The phenomenon of partial synchronization. (). After approximately 4 s, the system splits into two synchronized clusters. Meta-oscillator 1 disengages from the cluster (black line). Meta-oscillators 2 and 3 form a synchronized cluster (red line and blue line).
The test systems (10-oscillator and 3-oscillator) are two canonical test systems recognized as completely distinct in scale, topology, and system parameters, such as coupling parameter and oscillator inertia (see Appendix A). Furthermore, each test system comprises multiple oscillators that are mutually heterogeneous. In experimental verification, strong perturbations trigger strong nonlinear and high uncertain responses. Meanwhile, the examples in Table S1 (in the SM [10]) encompass uncertainties in perturbation sites. The verification results demonstrate that the boundary remains robust in addressing these challenges. The successful replication of the boundary’s core functions, stability discrimination, periodic orbit instability prediction for multi-oscillator systems, and partial synchronization diagnosis, across these disparate systems provides a formidable foundation for a robust and universal conclusion: The synchronization stability boundary is independent of network topology and system parameters. This independence carries a dual significance. On the applied level, it confirms Equation (1) as a robust and universally applicable criterion. On the fundamental level, the recurrence of the identical boundary form across systems with disparate structures supports a more profound corollary: the synchronization stability boundary is a universal property that transcends any specific configuration. Consequently, our work demonstrates that this key system function (the synchronization stability boundary) can be predicted without recourse to structural details, thereby challenging the “from configuration to function” principle as a necessary foundation for predicting collective dynamics in complex networks [3,4]. We clearly recognize that numerical simulations alone cannot establish such a significant viewpoint. Even validation across more networks would face the same skepticism. Therefore, we also provide mathematical proofs (Appendices D and E). Rigorous mathematical proofs further establish that the emergence of the synchronization stability boundary is dictated by an intrinsic condition rooted in physical reality (as proven in Appendix D), whose mathematical expression coincidentally—and elegantly—manifests as the competition between dissimilarity and suppression described by Equation (1).
By bypassing reliance on network structure and parameters, this framework can judge stability directly from individual state measurements. It thus offers a radically simplified approach to analyzing stability in complex systems, demonstrating how fundamental laws can be extracted from observable physical quantities alone. It is particularly noteworthy that the boundary equation was identified prior to its physical interpretation (Appendix B). This sequence of discovery suggests that the boundary may be rooted in an origin more fundamental than any specific disciplinary context. A key piece of evidence is the mathematical equivalence between the generator swing equation (used here for validation) and the Kuramoto model [6]. This equivalence implies that our findings reveal a universal law applicable to all oscillator networks of the same type. Furthermore, the stability boundary established in this work, along with its configuration-independent nature, fundamentally defines the synchronization stability limits for a broad class of oscillator networks. Based on this, extending the framework (such as and in this work) established in this study to other disciplines will become a highly promising direction for future research, building upon interdisciplinary studies of synchronization [1].
This work transitions the inquiry from configuration-to-function to principles-to-function. This line of inquiry, in turn, leads us to more profound questions [5]: Do other features, similarly independent of configuration, exist in complex systems? If so, what is their physical origin? And could their existence imply an underlying, unified description of complex systems?. Seeking answers to these questions is precisely the crucial step toward a new cognitive landscape centered on emergence.
Symmetry, Asymmetry and Synchronization Stability
The stability boundary defined by Equation (1) offers a new perspective on the roles of symmetry and asymmetry. Traditional research has often focused on how network topology influences the ability to achieve synchronization or its patterns [20]. In contrast, our boundary condition governs synchronization stability. This state-based criterion unifies scenarios previously attributed to either symmetry or asymmetry.
The link between symmetry and stability emerges naturally. Such symmetry typically originates from underlying topological symmetries in the network and the homogeneity of the oscillators. When oscillator amplitudes are equal
, the left side of Equation (1) is satisfied for any angle difference (). This global stability arising from symmetry has been supported by other studies [21]. This defines a stability region and provides a condition derived directly from oscillator states.
Equation (1) also reinterprets asymmetry. Such asymmetry often stems from topological asymmetries or heterogeneity. The stability limit on its right side increases with the amplitude difference :
, showing that a state asymmetry can expand the stable angle range. This explains observations where designed network asymmetries were found to improve stability in specific systems, as they can create favorable state configurations [22,23]. However, the governing principle is the universal condition , not the asymmetric structure itself. Critically, this expansion has a limit: when , the corresponding meta-oscillators lose synchronization. This demonstrates that the stability domain, though malleable, is bounded by the state criterion.
Therefore, Equation (1) harmonizes the seemingly contradictory conclusions about symmetry and asymmetry. It reveals that both are permissible pathways within a unified state-space geometry defined by amplitude and angle differences. The pursuit of perfect symmetry or carefully crafted asymmetry in traditional approaches can now be understood as two different strategies to navigate the system into the admissible region of this universal boundary. Our result establishes a direct, configuration-independent criterion for assessing synchronization stability, shifting the analytical focus from the design of network structures to evaluating the impact of configuration changes on system state.
Spontaneous Synchronization Layer and Non-Equilibrium Critical Phase Transitions
To understand how systems fail, it is equally important to investigate the behavior of a disturbed system at the stability boundary. When perturbed and near this brink, the system’s trajectory, described by the polar coordinate variable of the meta-oscillators, reveals a surprising structure indicative of spontaneous synchronization.
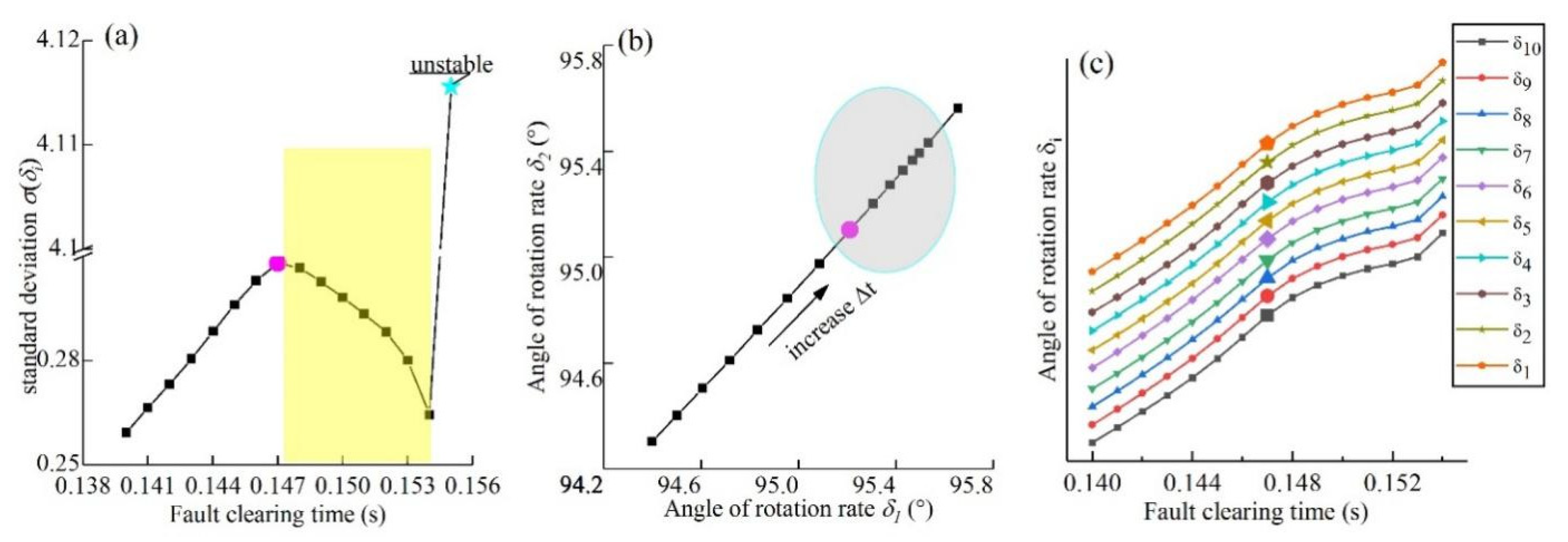
The perturbation duration increases from 0.140 s to 0.155 s. A strong external perturbation occurred at the 18-node. .
(a). Spontaneous synchronization of meta-oscillators. The horizontal axis represents the perturbation duration. The vertical axis represents the standard deviation of . The yellow area indicates the thin layer where spontaneous synchronization occurs. Here, the standard deviation begins to decrease at 0.147 s (magenta) and increases by 1300% at 0.155 s (cyan) when the system is unstable. can be calculated via Equation (S6).
(b). Phenomenon of the bottleneck. increased from 0.140 s to 0.154 s. The black arrow indicates the direction in which increased. From (the magenta dots) onward, the distance between neighboring points decreased in the direction of the black arrow (elliptical shaded area).
(c). Starting points of spontaneous synchronization. The horizontal axis represents the perturbation duration. The amplified points indicate the starting points of spontaneous synchronization. All the starting points appear at . The trends of all were almost identical. Combining (b) and (c) reveals that in this case, the structures in (b) exist between any two meta-oscillators. (To clearly present the trend of , the linear scale on the vertical axis has been omitted; the corresponding data can be found in Table S2 in the SM [10].)
We report a phenomenon of spontaneous synchronization that occurs as the system approaches the stability boundary. This is evidenced by a decrease in the standard deviation (Figure 3(a)), indicating that the subsystems’ velocities spontaneously converge toward the mean value. This signifies an evolution toward a synchronized state and serves as an example of the emergence of spontaneous synchronization. However, this evolution cannot return to the synchronous state [2]. Crucially, this self-organization is confined to a thin layer (yellow region in Figure 3(a)) immediately preceding the eventual loss of stability at . This geometric region may originate from non-equilibrium critical phase transitions [24]. The phenomenon of spontaneous synchronization has been observed across different perturbation sites (Figure S4 in the SM [10]) and in distinct test systems (Figure S1 in the SM [10]), confirming its universality as an intrinsic characteristic of systems approaching the stability boundary. The impact of this spontaneous synchronization on synchronization stability is profound and complex. More profoundly, the reduction in the value of within the thin layer reveals a change in the system’s symmetry. If the system’s state were merely a single-valued function of the control parameter , then its forward and backward variations should follow identical trajectories. The observed reduction in directly breaks this path symmetry: during backward variation, the system cannot retrace the non-monotonic process of “first decreasing and then increasing” seen in the forward path, because an increase in is fundamentally impossible when evolving from a disordered to an ordered state. Consequently, the system state depends not only on , but also on the manner of approaching the critical point.
The system’s trajectory in state space reveals a unique structural signature associated with this phenomenon. For a constant step size , the distance between successive states decreases within the shaded area of Figure 3(b), forming a structure termed a “bottleneck” that exhibits a collective slowing-down. This spatial manifestation of deceleration emerges precisely at the temporal onset of spontaneous synchronization, i.e., when begins to decrease at (the magenta dots correspond exactly to in Figure 3(b).). To our knowledge, this structure has not been previously reported. A comparison between Figure 3(b) and S3(a) in the SM [10] confirms that this barrier structure is not a misleading result introduced by Equation (S2), as it is also present in the oscillator’s dynamic data. We hypothesize that the formation of ‘barriers’ may be related to the emergent long-range coherence near critical points within the system. This global cooperative dynamics manifests here as trajectory clustering and deceleration.
The precise timeline of spontaneous synchronization is delineated by a distinct transition in the indicator . As shown in Figure 3(c), the value of for all meta-oscillators undergoes a simultaneous and coherent shift at (amplified points). This timing coincides exactly with the moment when the standard deviation begins to decrease in Figure 3(a), unambiguously linking the reversal in to the onset of spontaneous synchronization. Prior to this moment, remains positive; immediately afterward, becomes negative and remains so. This system-wide reversal indicates that is the starting point of the spontaneous synchronization stage. The stage end is clearly indicated by the system’s loss of synchronization at , a state change that is demonstrated by the dramatic increase in the standard deviation in Figure 3(a) and the corresponding time-domain simulation results in Figure 1(e). Thus, the metastable window of spontaneous synchronization is bounded between and . It should be noted that during spontaneous synchronization, the “barrier” mentioned above does not always emerge. Instead, the system exhibits an alternative trend toward synchrony (see Figure S1 in the SM [10]). In our experiments, this trend occurred more frequently than the barrier. Further analysis reveals that these two phenomena are mutually exclusive.
This newly identified spontaneous synchronization constitutes a distinct phenomenon, separate from those previously reported in power grids [25]. Existing phenomena typically describe how systems self-organize into synchronized states. In contrast, the novel spontaneous synchronization is uniquely characterized by its occurrence during a forward, perturbation-driven process toward instability and its association with the novel “bottleneck” structure. Second, and more critically, its emergence is strictly confined to the immediate vicinity of the synchronization stability boundary, as evidenced by experimental results under multiple perturbation scenarios (Figure 3(a) and S4 in the SM [10]). The intimate link between spontaneous synchronization and the stability boundary leads to a profound implication: The emergent layer of spontaneous synchronization is independent of the configuration. More specifically, this independence is invariant across different configurations: throughout spontaneous synchronization, coordinate point consistently resides near the boundary in the 3D coordinate system . More direct evidence comes from experiments using a separate test system (3-oscillator), where the phenomenon was also observed (Figure S1(a) in the SM [10]). This configuration-independence stands in sharp contrast to the long-held viewpoint that spontaneous synchronization is fundamentally governed by and explicable through the network’s structural configuration [3]. Our finding therefore uncovers a distinct mechanism that operates independently of such structural determinants. Moreover, the co-emergence of the spontaneous synchronization and the boundary suggests an intrinsic and close connection between the critical phenomena and the stability conditions in non-equilibrium systems.
The path symmetry breaking, together with the barrier structure and the collective sign reversal reflected in , collectively points to a physical picture that transcends conventional phenomena. Specifically: 1), The configuration independence suggests the principle is universal, not specific to topology. 2), The system-wide coherence indicates the emergent long-range coherence among constituents. 3), The path symmetry breaking signifies a history-driven, non-equilibrium process. This combination of universality, long-range correlation, and non-equilibrium history dependence is precisely the hallmark of “critical abrupt transition in non-equilibrium systems” [24]. Consequently, these observed features provide strong support for the view that the boundary defined by Equation (1) is not merely an intrinsic geometric criterion of stability, but a critical point governing a non-equilibrium phase transition, with the spontaneous synchronization layer serving as its emergent signature. The phenomena we report are suggestive of an underlying critical mechanism. The oscillator system, when pushed to its synchronization stability limit, may thus serve as a novel testing tool for studying non-equilibrium critical behavior, beyond idealized models [1]. Other findings, particularly the diversity of behaviors near the stability boundary (e.g., contrasting outcomes in Figure 3 and Figure S1 in the SM [10]), highlight a crucial question: how to understand the behavior of coupled oscillators before instability occurs. Key questions remain, including the specific conditions for the formation of the bottleneck and the physical determinants of the thickness of the spontaneous synchronization layer. Resolving these questions will be a primary objective of our future research.
Conclusions
In summary, this work establishes that the synchronization stability of coupled oscillator networks is governed by an intrinsic, configuration-independent principle, rather than by configuration alone. This principle—the existence of a stability boundary rooted in physical reality (real number)—is rigorously proven (Appendix D) to be independent of network topology and parameters. The elegant equation we discovered (Equation (1)) and its interpretation as a balance between dissimilarity () and suppression () provide the specific mathematical form and a profound physical picture for this principle.
Consequently, our contribution is dual-faceted. Conceptually, it identifies a fundamental constraint that challenges the “from configuration to function” paradigm for this key functional limit (in the context of the boundary as a key network function). Methodologically, it provides a powerful framework for stability assessment directly from observables.
More fundamentally, this work compels a re-examination of the foundational belief that understanding a system’s specific structure is the prerequisite for deriving its general laws. Here, a general law governing the synchronization stability exists independently of structure, suggesting that in some domains, abstract, structure-transcending principles may exist a priori, with specific networks serving merely as particular instances subject to these principles.
Supplementary Materials
The following supporting information can be downloaded at the website of this paper posted on Preprints.org.
Data Availability Statement
All the data that support the findings of this study are available at https://doi.org/10.57760/sciencedb.24825.
Conflicts of Interest
The author declare no conflicts of interest.
Appendix A. Test Systems
This paper treats real-world power systems as a research platform for the synchronization problem of coupled oscillators. Power grids exhibit key features of complex networks. Moreover, the swing equation, which describes generator dynamics, is mathematically equivalent to the Kuramoto model [6]. This study validates the proposed method using two standard and entirely distinct power grid test systems, namely, the WECC test system (3-oscillator) and the New England test system (10-oscillator), which differ in network topology, scale, and system parameters. The use of these fundamentally different networks is critical, as it demonstrates the broad applicability of our approach beyond any single, specific system. The generator parameters of each system are heterogeneous.
For each system, the datasets comprise the dynamic parameters of the generators, the net injected real power at the generator nodes, the load demand at the nongenerator nodes, and the parameters of all the transmission lines and transformers. All electrical quantities, including the generator terminal voltages reported in this paper, are expressed in the per unit (p.u.) system, normalized to the respective base values of the test systems. For a power system, the reference frequency is typically 1.0 p.u., corresponding to the rated frequency of the system (50 Hz or 60 Hz in most power grids globally). As previously stated in this paper, . This information is sufficient for performing standard power flow and subsequent stability analyses.
WECC test system (3-oscillator) [26]. This system represents the Western System Coordinating Council (WSCC), which is part of the region now named the Western Electricity Coordinating Council (WECC) in the North American power grid. The system contains 3 generators with different parameters.
New England test system (10-oscillator) [27]. The IEEE 39-bus system is the 10-machine New England Power System. The prototype of the IEEE 39-node system is a model of an actual power grid in New England. The system contains 10 generators with different parameters.
The simulation results from these datasets are presented throughout the paper, with the New
England system results primarily shown in Figures 1, 3, and S2‐S5, and Table S1, and the 3‐generator
system results in Figures 2 and S1.
Appendix B. How Did the Boundary Equation Come With?
Initially, we were puzzled by the physical nature of the critical points in the synchronization of coupled oscillators: What makes these points so special that the system exhibits such markedly different behaviors in opposing directions within their vicinity? Given that the network topology and system parameters are entirely unknown — with only the knowledge that oscillators reside in a common network — is there a simple, unified way to locate them?
We plan to search for clues from the data. First, we select the physical quantities to be recorded: amplitude , phase , and rotation speed , as they are the most important quantities in the problem of oscillator synchronization: . We can extract these quantities from the time-domain values of the amplitude, and angular frequency naturally aligns with the definition of synchronization: . For oscillator systems that are actually synchronized, we observe that phases differ within a certain range, which would significantly increase the complexity of analysis. Therefore, we decide to use only amplitude and the angular frequency of the oscillator.
In the analysis of oscillator systems, amplitude-phase diagrams are commonly used to visually represent the relationships among various physical quantities. Inspired by this simple visualization tool, we mapped the angular velocity to the interval via transformation , originally because a finite interval is more convenient for mathematical processing. Here, is the reference frequency.
As mentioned above, we are only interested in the critical point of synchronization stability. Therefore, as the basis for data analysis in this work, the criteria for identifying synchronous critical states used herein is provided below.
All analyses are conducted within a fixed time window and . is defined as the instantaneous values of the angle of frequency of ith oscillator.
Considering the definition of synchronization, the key state variable is the difference . Its equilibrium point (synchronous state) is . Without loss of generality, let denote the initial time of a perturbation (typically corresponding to 0).
Given three positive, finite parameters:
Initial tolerance : The maximum allowed angular difference at time . denote the duration of the perturbation.
Operational tolerance : The maximum allowed instantaneous angular speed difference during the observation period.
Observation duration : The length of the time window over which stability is to be assessed.
Definition (Time Stability): For the dynamical system, if difference (and ) starting from an initial state satisfying also satisfies:
Then the system is said to be finite-time stable with respect to the angular difference under the parameters . This definition is closely related to other definitions of stability [16,28].
Explanation:
Finiteness of Time: Stability is defined and verified only for a finite future time interval . This is because all experiments can only be conducted over a finite duration (e.g., 20 seconds).
Full-Time Enforcement: Stability requires the state to remain within bounds for the entire observation period, not merely at the final instant. This is the key to distinguishing the critical point. According to this definition, if continues to increase within the time window (as shown in Figures 1(e), 2(d), etc.), the oscillator desynchronizes; otherwise, it remains stable (as shown in Figures 1(d), 2(c), etc.). The data (the amplitude) and are derived from state calculations under severe perturbations (see Experimental steps in the Supplementary Material). We therefore define the maximum perturbation duration () that still maintains stability as the critical perturbation, and record this scenario as the “synchronization critical point”.
The boundary equation with
Guided by the above principles, we identified a small number (18node and 12node scenarios) of synchronization critical points and desynchronization points. After preliminary analysis of this data, we found that Equation (A1) can effectively distinguish between these two different states.
and .
We define:
The symbols “∆” and ““ are used as labels for distinction only and have no mathematical significance. and have the same dimension and can be directly compared in size. Thus, Equation (A1) is equivalent to . This equation exhibits excellent symmetry.
Through Equation (A2) and the analogy of the phasor diagram, we discovered that Equation (A1) corresponds to a elegant geometric image in polar coordinates (see Figure A1).
Figure A1.
Geometric definitions of and in the polar coordinate system and their relation to synchronization state.
Figure A1.
Geometric definitions of and in the polar coordinate system and their relation to synchronization state.
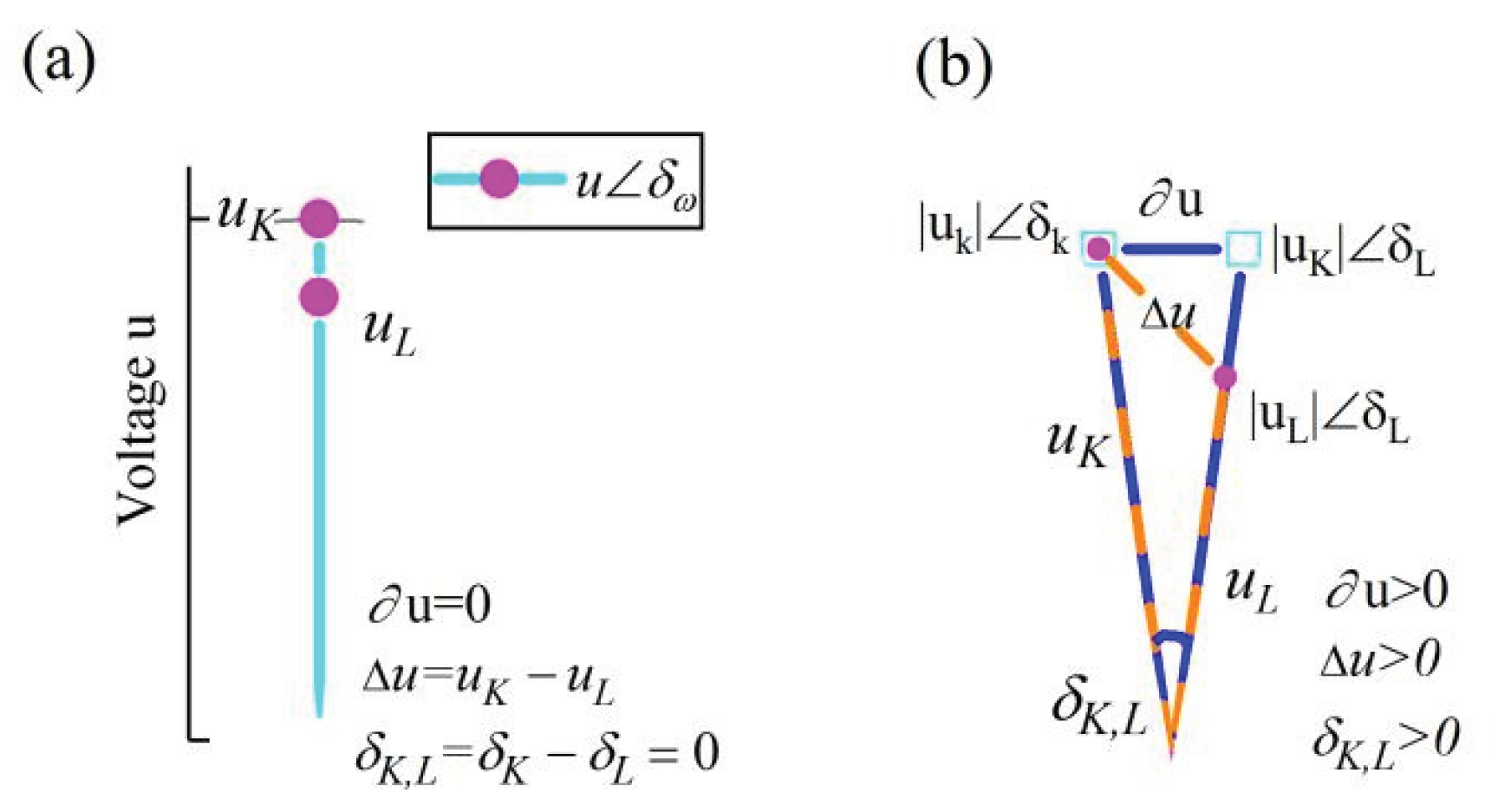
represents the “suppression potential difference”, while represents the “dissimilar potential difference” between the K-th and L-th oscillators. and are calculated via Equation (A2). Figure A1 helps to visually show the elegant geometric relationship between and .
(a). Synchronized state. Each magenta dot represents the coordinate of the i-th meta-oscillator . The cyan line has a length equal to the oscillator’s amplitude . The angle of frequency is calculated as . Here, is the frequency of ith oscillator and is the reference frequency (corresponding to base frequency in power systems). When all the oscillators are synchronized, the case is characterized by .
(b). Asynchronous state. The length of the orange dotted line between the magenta square dots represents the magnitude of , and the length of the solid blue line between the cyan dots represents the magnitude of . When the oscillator frequencies differ, the case is characterized by . Analysis of simulation data reveals that the stability of the system correlates with the relative magnitudes of and ; the condition defines the stability boundary (Equation 1).
Moreover, the simplified Equation (1) is also an elegant and symmetric equation:
The mathematical elegance of Equation (1) and its geometric simplicity align with the “tradition of simplicity” in physics. Therefore, we treat Equation (1) as a candidate equation for describing the stability boundary. We observe: since the equation does not explicitly contain network or oscillator component parameters, its independence from these factors is a natural mathematical result.
At the same time, we clearly recognize that analogy and physical intuition are insufficient to fully support the establishment of a theory. Therefore, we further validate it through additional experiments (Figures 2, S5 and Table S1, etc.). In this process, we discovered that the transformation of Equation (S2) is essential, otherwise we would encounter the paradox in Figure S2 in the SM [10]. To establish the universality of the conclusion, we also provide mathematical proofs demonstrating that Equation (1) is rooted in profound physical reality (Appendices D and E).
Although Equation (1) originates from physical intuition, mathematical proofs reveal its underlying physical basis, and extensive experiments validate its effectiveness. Now, we propose a reasonable, a posteriori interpretation in conjunction with previous literature, in order to connect more directly with known results. As mentioned at the beginning of the section “Boundary Equation and Its Verification,” Synchronization emerges when the suppression (of the loss of synchrony) dominates the dissimilarity [6]. That is to say, synchronization results from the competition between the tendency to “maintain synchrony” and the dissimilarity that “causes loss of synchrony.” This is a direct knowledge about synchronization. Combining Figure A1 and Equation (A2), we summarize the boundary: . When , the system is stable. Conversely, when , the system is out of synchronization and unstable.
The quantity can be interpreted as the “suppression potential difference.” It quantifies the “suppression” of the loss of synchrony.
The quantity can be interpreted as the “dissimilarity potential difference.” It quantifies the “dissimilarity” which drives desynchronization.
Under this interpretation, the boundary becomes a natural inference of the knowledge, representing the state where “suppression” and “dissimilarity” reach a balance, which is precisely the threshold for the loss of synchronization stability. This interpretation unifies the elegant mathematical form with the profound physical principle. Thus, the boundary equation not only serves as a universal criterion for synchronization stability but also provides a geometric tool through which the competition between synchronization and desynchronization forces can be directly visualized and analyzed.
Appendix C. The Boundary Equation Without
As mentioned above, transform the frequency into the angle of frequency , where represents the reference frequency and denotes the frequency of ith oscillator. is constrained to positive real numbers. However, to some extent, the selection of remains “anthropic selective”. Additionally, may be unknown before synchronization emerges. Can be eliminated from the boundary equation (i.e., is there a synchronization stability boundary independent of )?
When is substituted into Equation (1),
Considering and ,
By setting , and . . Equation (A4) becomes , where . Therefore, . By setting , . Considering and , . Therefore, .
By setting and . Equation (A4) becomes . Therefore,
For real-world systems, both and must be real numbers. This fact provides the basis for proving the boundary equation (see Appendix D). There is a constraint that . Therefore, the oscillator system is stable when
In Equation (A6), Condition , which is derived from Constraint and is ultimately driven by the requirement of .
is the stability boundary without . When , any value chosen for satisfies Equation (A6). is exactly the left side of Equation (1). When , Equation (A7) is equivalent to the right side of Equation (1). Equation (1) and Equation (A7) are equivalent [see appendix E]. This form of the boundary equation is still determined by the behavior of individuals in the system and is independent of the configuration.
A comparison of Equation (1) indicates that Equation (A7) has a larger range of applicability because Equation (1) requires prior knowledge of the value of . However, for convenience, this paper still uses Equation (1) for visualization, as shown in Figure 1(a).
Appendix D. Proof: The Synchronization Stability Boundary Is Rooted in Physical Reality
We prove that Equations (1) and (A7) describe the stability boundary. The proof proceeds as follows:
The proof proceeds in two steps. First, we prove that Equation (A7) represents the boundary. We then prove that Equation (1) is equivalent to Equation (A7). Therefore, Equation (1) is also shown to represent the boundary.
Definitions:
A Domain: Variables are , with . represents the frequency of the oscillator.
B Domain: Variables are . are the two roots of a quadratic equation (see Appendix C). represents the common frequency of the oscillator system.
There exists a pair of invertible algebraic maps, (see Equation A5) and , that establish complete equivalence between the two domains: Let .
Forward Map ,
Inverse Map ,
The Principle of Real Numbers: The value of the common frequency must be a real number. This stems from an uncontested consensus: For each oscillator, the measured frequency value must be a real number. Since the common frequency emerges from these individual frequencies, it must consequently be real.
Proof:
The maps and establish one-to-one correspondence between the A domain and the B domain within their domains of definition. Thus, the two systems are algebraically equivalent. The analysis of the A domain can be transformed entirely equivalently into the analysis of the B domain.
Define the discriminant: From the expressions of map , and are real if and only if , i.e., . If , are complex numbers.
In according with the principle of real numbers, the common frequency must be a real number. are two solutions to . This strictly requires that both and must be true. This requirement defines a boundary for the physically admissible region in domain B. The boundary is described by . Therefore, all physically realizable states must and can only lie within the region satisfying (Physically Admissible Domain).
On the basis of the principle of real numbers and the equivalence of the A and B domains, we can rigorously define the existence limit of synchronization:
Admissible domain: Regions in the A domain that are equivalent to those in the B domain where .
Boundary: Regions in the A domain that are equivalent to those in the B domain where .
Forbidden domain: Regions in the A domain that are equivalent to those in the B domain where . The system state cannot remain stable.
Thus, the equation is as follows:
strictly delineates the physically achievable region from the physically unachievable region. It constitutes the admissible boundary of the system. This is precisely Equation (A7), which is equivalent to Equation (1) (when is true). Therefore, Equation (1) is also proven to be the stability boundary. The boundary equation is a direct corollary of physical realizability (i.e., the condition of being real-valued).
Explanation:
In fact, the equivalence between the synchronization admissible boundary and the mathematical description of the principle of real numbers is shown here. Equation (A7) is precisely the mathematical expression of that principle. The boundary of the physically admissible domain defines the existence of system states and thus carries more profound implications. Logically, physical admissibility is the cornerstone for discussing stability: A state must physically exist before its stability can be discussed. Our work not only established this boundary but also revealed its remarkable independence from the configuration.
In this paper, the physically admissible region is interpreted as the stability region. Although the admissible boundary and the stability boundary are not conceptually identical, they can still be considered equivalent in the context of oscillator systems for the following reasons:
1, Stability refers to a system’s ability to return to an equilibrium state after being subjected to a perturbation. As detailed in the “experimental steps” section, a perturbation is applied to a synchronized oscillator system at an engineering-acceptable step size ( s) until the oscillator system loses synchronization. This demonstrates that the experimental design aligns with the concept of stability. This experimental design also indicates that even if the two boundaries do not perfectly coincide, their discrepancy falls within the acceptable resolution for oscillator systems.
2, All the experimental results demonstrate the successful application of the boundary to synchronization issues, including stability assessment and the periodic orbit stability for multiple oscillators. In experiments with different network topologies and perturbation scenarios, the observed stability discrimination results precisely matches the simulation experiments (refer to Figures 1, 2 and S5 in the SM [10]).
Our proof reveals that the synchronization stability boundary is ultimately constrained by the principle of real numbers. Here, the direct contribution of this mathematical proof lies in enabling us to understand a counterintuitive conclusion: the synchronization stability boundary is independent of any particular configuration. More profoundly, the boundary equation is directly grounded in fundamental principles of physics, thereby transcending specific configurations.
Appendix E. Proof of Equivalence Between Equations (1) and (A7)
Proof:
Equation (1) transforms equivalently to Equation (A4): The derivation from Equation (1) to Equation (A4) is presented in “The boundary equation without ”. According to this derivation process, when , Equation (1) is clearly equivalent to Equation (A4).
Equation (A7) transforms equivalently to Equation (A4): Equation (A7) becomes . Expanding the right-hand side of the above equation yields , which is expressed as . Let , then . When , that is , denote by [when the system is stable, is true (see Table S1 in the SM [10])]. The right-hand side of the above equation coincides with the right-hand side of Equation (A4), hence . Equation (A7) is equivalent to Equation (A4).
Both Equations (1) and (A7) are both equivalent to Equation (A4). Therefore, when , and , Equation (1) and Equation (A7) are equivalent.
Appendix F. Proof of Equivalence of Oscillators and Meta-Oscillators
The section on “Stability Boundary” employs meta-oscillators to validate the boundary equation. This raises a critical question: could the transformation from a oscillator to a meta-oscillator introduce erroneous results that invalidate the verification? In other words, regarding the criterion for synchronization stability, are the two models equivalent before and after the application of Equation (S2)?
Definitions:
Definition 1: All analyses are conducted within any fixed time window . During this time window, define as the total duration of periods where , and conversely, define as the total duration of periods where . Then, and . represents the instantaneous values of the angle of frequency of ith oscillator. is defined as the “proportion” coefficient.
Definition 2 (the stability of the oscillator system): The angle difference is defined as . For , the stability criterion is and the system is stable if and only if .
Definition 3 (the stability of the meta-oscillator system): According to Equation (S2) and Definition 1, the angles of frequency are defined as (the ith meta-oscillator) and (the jth meta-oscillator). Their difference is . The stability criterion uses the same as definition 2 does. The system is stable if and only if .
Proof:
From the definitions above, it is directly derived that: . According to Equation (S2), . We assume that within the time window, holds most of the time, implying that . For any two oscillators, and can always be selected. Therefore, this assumption does not lose generality and is always reasonable.
Theorem (the equivalence of stability assessment): Under the framework of Definitions 1–3, the oscillator system is stable if and only if the meta-oscillator system is stable.
The proof is completed by demonstrating the following two corollaries.
Corollary 1 (preservation of stability): If the oscillator system is stable (), then the meta-oscillator system is stable ().
Proof: From and the fact that implies , it follows that . Therefore, the meta-oscillator system is stable.
Corollary 2 (preservation of instability): If the oscillator system is unstable (), then the meta-oscillator system is unstable ().
Proof: The instability of the oscillator system () physically corresponds to a significant difference in the frequencies of the two oscillators, i.e., a loss of synchronization. This loss of synchronization implies that the state of one oscillator is persistently greater than that of the other for the vast majority of the observation window, indicating that the parameter . Substituting into the core identity yields [refer to Figure 1(f), 2(e), S5(c), (f) and (l) in the SM [10]]. Therefore, , and the meta-oscillator system is unstable.
The two systems are equivalent in stability assessment; that is, Equation (S2) does not change the stability discrimination of the system. The proof applies to a two-oscillator system.
Definitions:
Depending on the perturbation and configuration conditions, a multigenerator (multi-oscillator) system may form completely different synchronization clusters upon instability, which greatly complicates the analysis of its synchronization stability.
We now prove that the oscillator system and the meta-oscillator system retain the same stability even when extended to multiple oscillators.
Definition 4 (the “proportion” matrix): In the case of multiple oscillators, the “proportion” coefficient in Definition 1 is replaced by the “proportion” matrix . There is
The matrix satisfies all . For any i: and .
Definition 5 (the stability of the multioscillator system): The oscillator system comprises n oscillators, which form the set . For , the stability criterion is . The system is stable if and only if for any subset , holds. For a oscillator system with n oscillators, there are subsets.
Definition 6 (the stability of the n meta-oscillator system): By definition, there are also n meta-oscillators. These meta-oscillators form an ordered set, . Adjacent meta-oscillators are defined as ordered subsets within this set. L=K+1. The stability criterion uses the same as definition 5 does. The meta-oscillator system is stable if and only if all adjacent meta-oscillators are stable, i.e., . There are (n-1) ordered sets of .
Proof:
Theorem (the equivalence of stability assessment): The multioscillator system is stable if and only if the n meta-oscillator system is stable.
The proof is completed by demonstrating the following two corollaries.
Corollary 1 (preservation of stability): If the multigenerator system is stable, then the n meta-oscillator system is stable.
Proof: For any two oscillators , holds when the system is stable. That is, . Let ; then, .
For the ith and i+1th meta-oscillators, and . Therefore, . Let ; then, . Let , where and . Substitute: .
Let , . From , we obtain , where . Then and . so that .
For the vectors and , . Thus . Therefore . According to the Definition 6, the meta-oscillator system is stable.
Corollary 2 (preservation of instability): If the multigenerator system is unstable, then the meta-oscillator system is unstable.
Proof: According to definition 5, the multigenerator system instability indicates that at least one oscillator has lost stability relative to all the other oscillators, i.e., for all : . In this scenario, the frequency of is significantly faster or slower than that of the remaining oscillators. Without loss of generality, we assume that this oscillator runs faster than the others do. By definition of the mate-oscillator, the natural consequence of this assumption is that is directly defined as the mate-oscillator and (). It follows that: for all .
For , , since , and the row sum is 1: . Given for all , , while .
since and , it follows that . The adjacent meta-oscillators are out of synchronization. According to definition 6, the meta-oscillator system is unstable.
The proof applies to a two-oscillator system when n=2. For the scenarios of a two-oscillator system and a multigenerator system, the meta-oscillator system and the oscillator system are equivalent in terms of synchronization stability assessment. Therefore, for any specific stability analysis tool and stability criterion, we can study the synchronization stability of the original oscillator system through the meta-oscillator system.
Explanation:
From the proof, the following conclusions can be derived:
1, The subsets in the oscillator system are reduced to just ordered sets in the meta-oscillator system. This result significantly simplifies the analysis of synchronization stability. This equivalence decomposes and transforms the stability problem of high-order complex systems into a series of easily analyzable problems.
2, When the oscillator system becomes unstable, we can directly identify the out-of-step oscillator through the matrix.
3, This equivalence provides the basis for utilizing the meta-oscillator system to verify the validity of the synchronization stability boundary. Moreover, the results demonstrate that the meta-oscillator framework extends the conclusions of this paper from pairwise interactions to higher-order interactions, indicating that the synchronization stability boundary of high-order complex systems is also independent of the configuration.
4, This reduction algorithm is solely defined by the frequency value and is independent of any specific discipline. Consequently, it can be directly applied to a broader range of fields.
5, It may suggest “where the influence of configuration has gone,” since the order of is jointly determined by specific perturbations, network topology, system parameters, and initial conditions. Therefore, in subsequent studies (particularly when aiming to control the system) variations in configuration and the perturbed trajectories of system states are expected to become new focal points. (Their detailed analysis falls beyond the immediate scope of this work.)
References
- Koronovskii, A.; Moskalenko, O. I.; Hramov, A. E. synchronization in complex networks. Tech. Phys. Lett. 2012, 38, 924. [Google Scholar] [CrossRef]
- Dörfler, F.; Bullo, F. Synchronization in complex networks of phase oscillators: A survey. Automatica 2014, 50, 1539. [Google Scholar] [CrossRef]
- Newman, M. E. J. The Structure and Function of Complex Networks. SIAM Review. [CrossRef]
- Pecora, L. M.; Carroll, T. L. Master stability functions for synchronized coupled systems. Phys. Rev. Lett. 1998, 80, 2109. [Google Scholar] [CrossRef]
- Andersen, P. W. More is different. Science (80-. ) 1972, 177, 393. [Google Scholar] [CrossRef]
- Dörfler, F.; Chertkov, M.; Bullo, F. Synchronization in complex oscillator networks and smart grids. Proc. Natl. Acad. Sci. U. S. A, 2005 (2013; 110. [Google Scholar]
- Scheffer, M. Anticipating critical transitions. Science (80-. ) 2012, 338, 344. [Google Scholar] [CrossRef]
- Nishikawa, T.; Motter, A. E. Synchronization is optimal in nondiagonalizable networks. Phys. Rev. E—Stat. Nonlinear, Soft Matter Phys. 2006, 73, 1. [Google Scholar] [CrossRef]
- Boccaletti, S.; De Lellis, P.; del Genio, C. I.; Alfaro-Bittner, K.; Criado, R.; Jalan, S.; Romance, M. The Structure and Dynamics of Networks with Higher Order Interactions; Physics Reports.
- See Supplemental Material for additional evidence, which includes Ref. 11.
- Zhongxi, Wu; Xiaoxin, Zhou. Power System Analysis Software Package (PSASP)-an Integrated Power System Analysis Tool, in POWERCON ’98. 1998 International Conference on Power System Technology. Proceedings (Cat. No.98EX151) n.d., Vol. 1 (IEEE, 7–11. [Google Scholar]
- Cho, Y. S.; Nishikawa, T.; Motter, A. E. Stable Chimeras and Independently Synchronizable Clusters. Phys. Rev. Lett. 2017, 119. [Google Scholar] [CrossRef]
- Sorrentino, F.; Pecora, L. M.; Hagerstrom, A. M.; Murphy, T. E.; Roy, R. Complete characterization of the stability of cluster synchronization in complex dynamical networks. Sci. Adv. 2016, 2, 1. [Google Scholar] [CrossRef]
- Lück, S.; Pikovsky, A. Dynamics of multi-frequency oscillator ensembles with resonant coupling. Phys. Lett. Sect. A Gen. At. Solid State Phys. 2011, 375, 2714. [Google Scholar] [CrossRef]
- Guckenheimer, J.; Holmes, P.; Slemrod, M. Nonlinear Oscillations Dynamical Systems, and Bifurcations of Vector Fields. J. Appl. Mech. 1984, 51, 947. [Google Scholar] [CrossRef]
- Xu, H. Finite-Time Stability Analysis: A Tutorial Survey. Complexity 2020 2020. [Google Scholar] [CrossRef]
- Ajala; Dominguez-Garcia, A.; Sauer, P.; Liberzon, D. A Second-Order Synchronous Machine Model for Multi-swing Stability Analysis, 51st North Am. Power Symp. NAPS 2019, 2019. [Google Scholar]
- Omel’chenko, E. Periodic orbits in the Ott-Antonsen manifold. Nonlinearity 2023, 36, 845. [Google Scholar] [CrossRef]
- Dörfler, F.; Bullo, F. Synchronization and transient stability in power networks and nonuniform Kuramoto oscillators. SIAM J. Control Optim. 2012, 50, 1616. [Google Scholar] [CrossRef]
- Pecora, L. M.; Sorrentino, F.; Hagerstrom, A. M.; Murphy, T. E.; Roy, R. Cluster synchronization and isolated desynchronization in complex networks with symmetries. Nat. Commun. 2014, 5. [Google Scholar] [CrossRef]
- Timme, M.; Wolf, F.; Geisel, T. Coexistence of Regular and Irregular Dynamics in Complex Networks of Pulse-Coupled Oscillators. Phys. Rev. Lett. 2002, 89. [Google Scholar] [CrossRef]
- Molnar, F.; Nishikawa, T.; Motter, A. E. Asymmetry underlies stability in power grids. Nat. Commun. 2021, 12, 1. [Google Scholar] [CrossRef]
- Denker, M.; Timme, M.; Diesmann, M.; Wolf, F.; Geisel, T. Breaking Synchrony by Heterogeneity in Complex Networks. Phys. Rev. Lett. 2004, 92, 1. [Google Scholar] [CrossRef]
- Gutiérrez, R.; Cuerno, R. Nonequilibrium criticality driven by Kardar-Parisi-Zhang fluctuations in the synchronization of oscillator lattices. Phys. Rev. Res. 2023, 5, 1. [Google Scholar] [CrossRef]
- Motter, E.; Myers, S. A.; Anghel, M.; Nishikawa, T. Spontaneous synchrony in power-grid networks. Nat. Phys. 2013, 9, 191. [Google Scholar] [CrossRef]
- Anderson, P. M.; Fouad, A. A. Power System Control and Stability; John Wiley & Sons, 2008. [Google Scholar]
- Pai. Energy Function Analysis for Power System Stability; Springer Science & Business Media, 1989. [Google Scholar]
- Zeeman, E. C. Stability of dynamical systems. Nonlinearity 1988, 1, 115. [Google Scholar] [CrossRef]
Figure 1.
Experimental validation of the stability boundary (meta-oscillators).
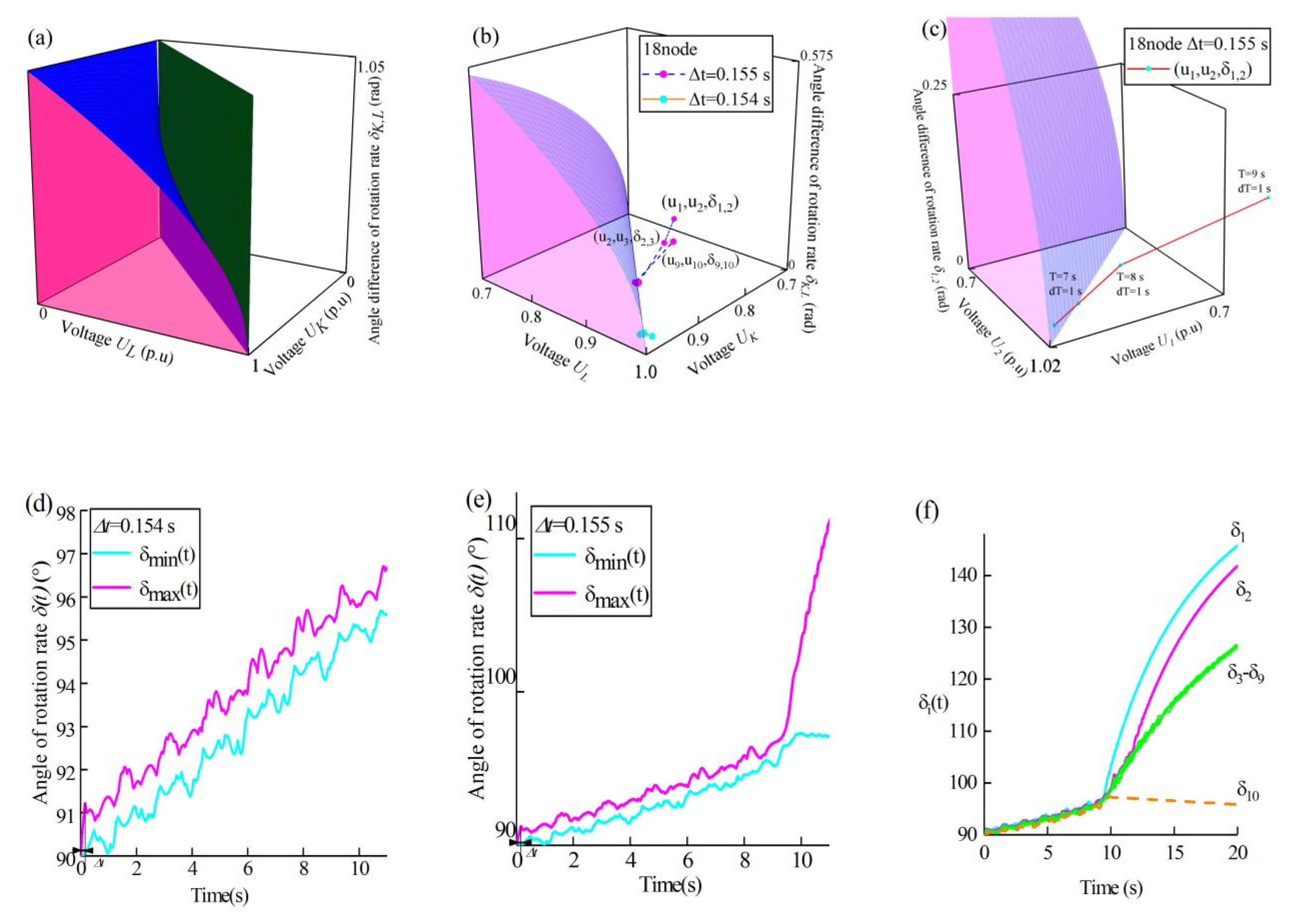
Figure 2.
Validation of the configuration-independent synchronization stability boundary on a completely different system. (meta-oscillators).
Figure 2.
Validation of the configuration-independent synchronization stability boundary on a completely different system. (meta-oscillators).
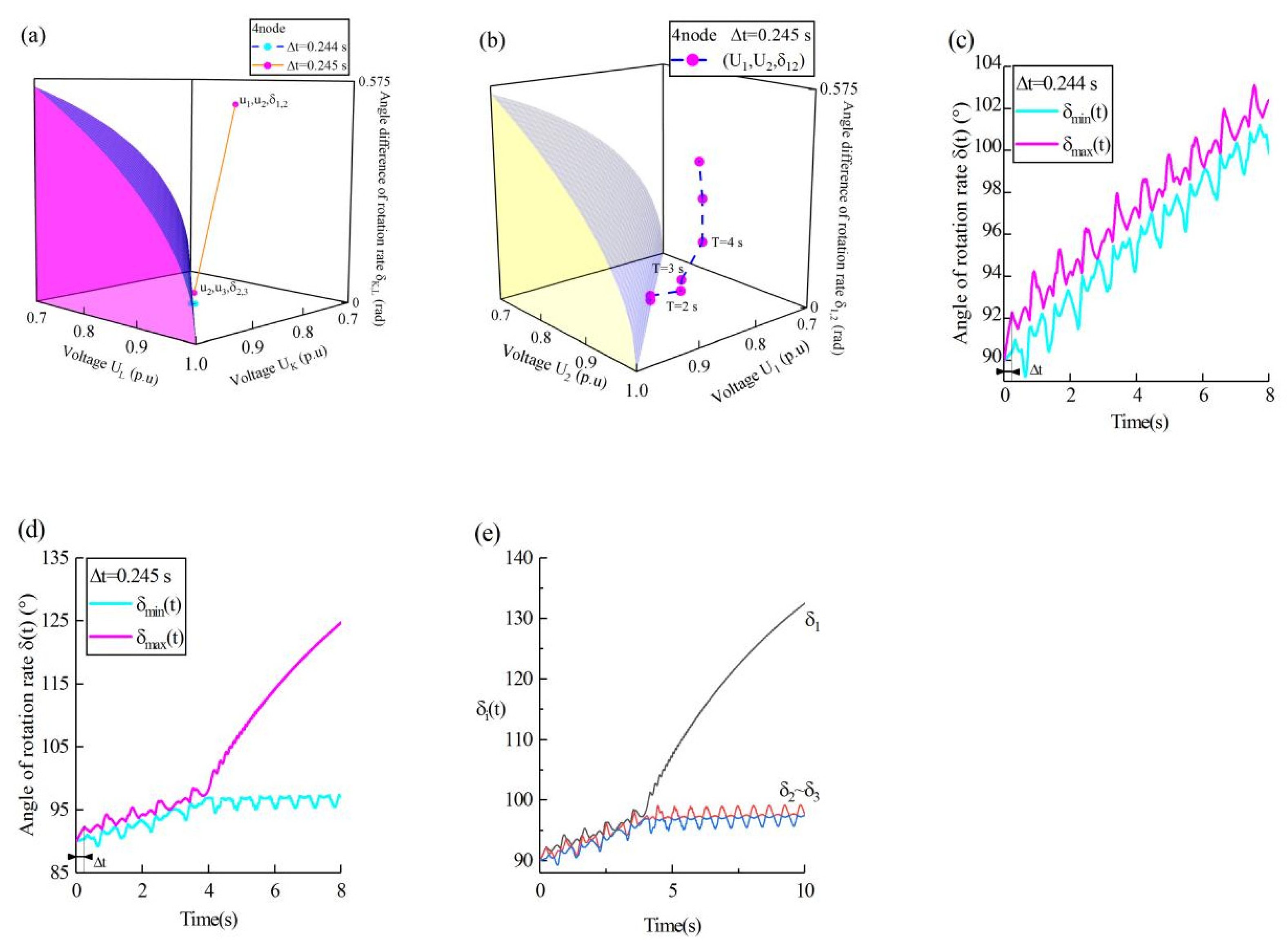
Figure 3.
Emergence of self-organization near the stability boundary. (meta-oscillators in the 10-oscillator).
Figure 3.
Emergence of self-organization near the stability boundary. (meta-oscillators in the 10-oscillator).
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



