
Submitted:
12 July 2023
Posted:
14 July 2023
You are already at the latest version
Abstract
Autonomous aircraft are the key enablers of future urban services, such as postal and transportation systems. Digital Twins (DT) are promising cutting-edge technologies that can transform the future transport ecosystem into an autonomous and resilient system. However, since DT is a data-driven solution based on AI, proper data management is essential in implementing DT as a Service (DTaaS). One of the challenges in DT development is the availability of real-life data, particularly for training algorithms and verifying the functionality of DT. The current article focuses on data augmentation through synthetic data generation. This approach can facilitate the development of DT in case the developers do not have enough data to train the Machine Learning (ML) algorithm. The current twinning approach provides a prospective ideal state of the engine used for proactive monitoring of the engine’s health as an anomaly detection service. In line with the track of Unmanned Aircraft Vehicles (UAV) for Urban Air Mobility in Smart Cities applications, this paper focuses specifically on the common Hybrid turbo-shaft in drones/helicopters. However, there is a significant gap in real-life similar synthetic data generation in the UAV domain literature. Therefore, Rolling Linear Regression and Kalman Filter algorithms were implemented on noise-added data, which simulate the data measured from the engine in a real-life operational lifecycle. For both thermal and hybrid models, the corresponding DT model has shown high efficiency in noise filtration and a certain amount of predictions with a lower error rate on all engine parameters, except the engine torque.
Keywords:
Autonomous Aircraft
; Urban Air Mobility
; Digital Twins
; Unmanned Aircraft Systems
; Unmanned Aircraft Vehicles
; Synthetic data Generation
; Data for Resilience
; Transport Complex Systems
; Smart Cities
; Digitalization
0. Introduction
Urban Air Mobility (UAM) has become a rising trend that garners significant attention from scholars and practitioners, aiming to establish a sustainable and resilient transport infrastructure. However, UAM encounters numerous technological and legislative challenges, including air traffic control, cybersecurity concerns, noise pollution [1], and ecological considerations.
Furthermore, it is important to note that Urban Air Mobility is a subset of NASA’s Advanced Air Mobility (AAM) initiative, which strives to create a safe, accessible, autonomous, and cost-effective air transportation system for passengers and cargo which aims to connect previously inaccessible urban and rural areas. [2].
In this article, we adopt the concept of Urban Air Mobility (UAM) as a secure and efficient way of transportation within urban areas considering both concerns and benefits. As a concern, we have the impact of vertical take-off and landing on factors such as engine noise, safety measures, and efficiency [3]. Additionally, UAM vehicles present new safety challenges compared to traditional aircraft [4].On a positive note, electrified propulsion systems have been identified as a promising solution for fuel savings and emission reduction [5].Moreover, the utilization of digital twin technology has proven effective in enhancing system and entity performance, enabling predictive maintenance, and increasing safety standards [4,6,7,8,9].
However, Digital Twin (DT) technology is rapidly emerging as a means to enhance system/entity performance and improve predictive maintenance practices with a high level of safety [5,6,7,8,9]. Nevertheless, DT strongly relies on data-oriented solutions and operates with machine learning (ML) algorithms. The primary challenge in this approach lies in obtaining real-life datasets to train the ML algorithms effectively. Especially in the aerospace domain, fabricating complex and costly entities to generate real-life measurements poses a significant obstacle. Recognizing this challenge, the main goal of this research is to explore Synthetic Data Generation approaches. Given the constraints of time and cost involved in setting up physical test beds and collecting data from real-life entities, the proposed solution is to leverage data augmentation through Synthetic Data Generation techniques.
The main goal of this study is to investigate the generation of synthetic data using simulated Hybrid Turbo-shaft Engine data to predict engine behavior in various flight scenarios. The main contribution of this research is the development of a Digital Twin for the Hybrid Turbo-shaft Engine based on Augmented Synthetic Data. This approach can be a facilitator in the development of DT in case the developers do not have enough data to train the Machine Learning (ML) algorithm. On the other hand, the current twinning approach provides a prospective ideal state of the engine used for the proactive monitoring of engine health in DT as an anomaly detection service. In brief, the study aims to fill the significant gap in real-life similar synthetic data generation in the UAV domain. This approach begins by constructing a simulation model of the Hybrid Turbo-shaft Engine. The model is then linearized to increase the understanding of the relationships between the engine’s parameters. Next, noise is added to the simulated dataset to replicate real-life noise patterns. The final step involves validating the performance of the Digital Twin.
The methodology section provides a detailed explanation of each step mentioned above. The results section presents a comprehensive analysis of the generated synthetic data, while the discussion section examines and validates the findings.
1. Literature review
Researchers and practitioners in developing new infrastructures are actively exploring innovative solutions to address traffic congestion and provide faster, safer, and more efficient transportation systems. Initiatives such as Hyperloop and Urban Air Mobility (UAM) have gained attention in this regard. Among these solutions, UAM appears to be the most promising technology currently being implemented, offering sustainability benefits. This section presents previous studies focusing on the Urban Air Mobility concept, Synthetic Data generation, and the significant role of Digital Twin technology in increasing the sustainability and safety aspects of the vision. It’s important to highlight the concept of "Vertical Takeoff and Landing" Vehicles (VTOL), which are considered the most common solution for infrastructure problems and traffic management in Urban Air Mobility because VTOL vehicles don’t require such complex and costly infrastructures as regular airports [3,4,10].
Following up on this idea, today helicopters are one of the most commonly used VTOL vehicles. The propulsion system employed in helicopters is the turboshaft engine, which is a type of gas turbine optimized for generating shaft power instead of jet thrust. With the projected expansion of the Urban Air Mobility (UAM) market, there is growing concern regarding the impact of CO2 emissions from aerial transportation on the global environment. However, recent studies have indicated that the electrification of propulsion systems will play a significant role in the development of eco-friendly aerial vehicles[11,12].
One of the most studied electrified propulsion systems for UAM are Hybrid Turbo-shaft engines. This type of engine offers several advantages in terms of energy consumption, performance, and safety, including:
- Longer range and endurance due to the presence of two storage systems (electric storage and fuel storage)[12].
- Improved maintenance workability due to the reduction in the components.[12].
- Lower vibration and noise increase the engine’s lifespan[12].
- In case of engine failure the electric backup system offers a few minutes of endurance.[12].
Like many new technologies, ensuring a high level of safety in complex systems requires advanced performance analyses. However, simulating such complex systems can be computationally expensive, and it is crucial to align these analyses with the real-life performance of the system being studied. In this context, the use of Synthetic Data and encompassing different correlated parameters can be beneficial in replicating the behavior of the system under investigation. Utilizing Data-Driven simulations and Digital Twin (DT) technology supports building predictive models that enable real-time simulations that help with preventing undesirable scenarios. As a result, DT affords us a clear image of the system from a physical and operational point of view[13,14,15,16,17].
DT is widely used for real-time modeling of complex systems. But even DT was born in the aerospace domain in the 1960s as a real-time model of Apollo 13’s oxygen tank[18], Figure 1 shows that it is in an infantile stage in the UAS/UAV applications. The result of state-of-the-art review reveals the significant gap in the studies of implementing DT in the UAV/UAS domain. In addition, Digital Twin models have demonstrated their effectiveness in handling complex systems by utilizing simplified models [16]. The proposed architecture of a Predictive Digital Twin model involves five dimensions: the Physical entity, Digital Model, Real-life measurements (input), connection, and Digital Twin outputs (predictions/simulated data) [14].
A recent systematic review by Butila et al 2022 shows UAVs play a vital role in shaping the future of urban services[19] . They offer numerous benefits to urban environments, such as transforming transportation and delivery services by circumventing congestion [19]. Moreover, drones contribute to emergency response, infrastructure inspection, and urban surveillance, thereby enhancing safety and efficiency [20,21,22]. With the advancement of regulations and technology, autonomous aircraft will further unlock their potential, leading to improved efficiency and safety in urban areas [19,20]. On the other side, UAVs can play a crucial role in further advancing the future of urban transportation. UAM vehicles, including electric vertical takeoff and landing (eVTOL) aircraft, share similarities with UAVs in terms of autonomous flight, electric propulsion, and advanced sensing and navigation systems [23]. Background literature from UAV operations studies, such as autonomous flight control algorithms, obstacle detection and avoidance systems, and communication protocols, can be used to improve the safety, efficiency, and reliability of UAM vehicles [24]. Therefore, UAV technology research and development efforts play a key role in forming the foundation for the successful implementation of UAM systems, bringing us closer to a future where air transportation is seamlessly integrated into urban environments.
The state-of-the-art study shows that most of the research belongs last 5 years. The majority of the studies have been done on Security [25,26] and navigation[27,28], and there are a handful of articles that are experimental with a test bed to collect data[29]. This review unveils that there is a lack of testbeds and experimental data in this domain. correspondingly, developing/testing/employing AI algorithms for DT is not possible if there is no data for training the algorithm. this was the main motive to trigger the research on Synthetic Data Generation for UAS/UAVs.
As this study focuses on data processing and the accuracy of Digital Twin predictions, it is suggested to implement the recursive algorithm Kalman Filter in the Digital Twin model and data processing. The implementation of Kalman Filter can enhance the accuracy of predictions by adjusting the state estimate process based on previous measurements [14] and estimations. However, due to the lack of real-life measurements/physical entities, researchers and academics have demonstrated that mathematical models, implemented using software like MATLAB for study purposes, can efficiently generate data and validate their approaches [30].
The unavailability of costly infrastructures, such as wind tunnels or physical entities, poses a significant challenge in academia. In this regard, data generation plays a crucial role in assisting academics with their research. In the case of UAVs, data generation allows researchers and developers to simulate and create synthetic data to train and test algorithms[31], improving the performance of autonomous flight systems, collision avoidance mechanisms[32], and object detection algorithms[9]. By generating diverse data scenarios, such as different weather conditions, terrains, and obstacle configurations, engineers can evaluate the robustness and effectiveness of their UAV systems in a controlled and scalable environment[32]. This approach assists engineers in assessing the behavior and performance of designs without the need for physical prototyping or costly experiments, saving time and resources while facilitating iterative design improvements. Overall, data generation plays a vital role in enabling effective development, testing, and optimization of UAVs and engineering systems when real data is scarce or inaccessible.[31,32,33] Therefore Data generation techniques can be used in different contexts considering an efficient PCA to find the most efficient parameters of the problem under study.
Building upon these research and development backgrounds, this investigation aims to assess the performance of a predictive digital twin model based on Kalman Filtering and ML. The model aims to predict the behavior of a hybrid turboshaft engine using synthetic data with added noise.
2. Materials and Methods
In this section, the workflow of employed Synthetic Data Generation and DT approach will be detailed. The pipeline architecture of the workflow is shown in Figure 2. In the current article, The proposed DT model is founded on the recursive algorithms, Kalman Filter and Rolling Linear Regression which follows the workflow of the 6 main steps. The outline of the steps in the order is:[step1: Data Linearisation and referencing, step2: Adding noise, step3: Implementation of Linear regression, step4: Implementation of Kalman filter step5: Implementation of Rolling linear regression, step6: Printing the results in a function of mean squared error \mean]
In order to investigate the performance of the proposed DT model we adopted the simulation model which is previously published by Donateo, T. et al. [14] that provides a generated DATA set of the propulsion system (Hybrid Turboshaft Engine Figure 3) shown in Figure 2 and Figure 4.
The information on the simulated mission of the hybrid powertrain with compressor degradation is described in the following Table 1.
The generated DATA is containing the input variables, state variables, and output variables of the engine for both thermal and electrical systems, after cleaning the data set the modeling of the DT will be described in the following subsections:
2.1. Data Linearisation
The linearisation of non-linear complex systems increase the understanding and the study of the behavior of the system without losing the relationship between the parameters. In the UAV domain, in particular, control systems engineering of UAVs, representing the nonlinear dynamical systems in the form of mathematical models through a set of state variables and I/O. If these variables are related by a first-order differential equation, the model is called state-space form [35,36]. The state space form of the system is formulated in the following way[37]:
Considering x is the state vector and U is the input, there are two continuous and differential functions in equations 1 and 2 (f and g). Expanding differential functions in series around and , the following equations are defined where the x and u are in the vicinity of a point (, ).
We define the deviation on an equilibrium state where:
After defining deviations we can model our engine as a Linear-Time- Invariant (LTI) [37,38,39], the general non-linear form of the state and the output equations of the engine are described by the following equations [40]:
where:
2.2. Referencing data to take off condition
Since the features of the data from an engine have varying scales which decreases significantly its readability.
By a consequence the patterns between features will be hard to study in this situation data normalization is an efficient solution, so we referenced all the features to the Take off condition.
Therefore, considering the reference equations (equations 7 and 8), our model is described as follows:
Where the explanation of each parameter is shown in Table 2
2.3. Noise/Error generation:
In order to simulate real-life conditions for our Digital Twin model we will be comparing the Kalman filter’s Performance with varying noise by drawing samples from a normal (Gaussian) distribution.
where:
- The mean = 0 (“centre”) of the distribution.
- The standard deviation = 0.001 (spread or “width”) of the distribution.
2.4. Prediction and Filtering
2.4.1. Rolling Linear Regression
To predict or reduce error rates, linear regression is an excellent statistical tool for creating a predictive model using a captured set of values for the response and explanatory variables. Rolling regression, also known as "moving period regression" or "rolling window regression," evaluates the changing relationships among variables over time, specifically measuring the outputs such as correlation and standard error from linear regression. This visualization allows for adjustments to the dataset as time progresses, whereas traditional linear regression models assume that parameters remain constant over time. The general procedure of linear regression is illustrated in Figure 5. The results from the rolling regression will serve as input for implementing the Kalman Filter and investigating its advantages and efficiency in filtering noise and making more accurate predictions.
2.4.2. Implementation of Kalman filter
Kalman filter is a recursive algorithm that adjusts the process state using real-time measurements. The reason that filtering algorithms are used is that in real-life modeling scenarios, the measurements are not in all respect accurate. Therefore, when data-driven methods are implemented, we need to deal with the noise that is present in the collected data from IoT sensors. In the current study, instead of the noisy measurement, we will use data that are produced by a simulation model with the noise that is added to the simulation data(SubSection 2.3).
As mentioned earlier, the relationship between the inputs and outputs of the hybrid turboshaft engine is described using a state space model to represent the system’s state. The difference between the actual behavior and the simulation data is attributed to uncertainty in the dynamic model, known as process noise. To address errors or uncertainties in the synthetic data generated by the simulation, the noise (already introduced in Subsection 2.3) will be filtered to achieve behavior similar to real-life conditions. Therefore, to calculate the next state, a recursive filtering algorithm will be employed, utilizing the previously calculated estimation of the state.
Figure 6.
The block diagram of Kalman filter version that is used in current approach
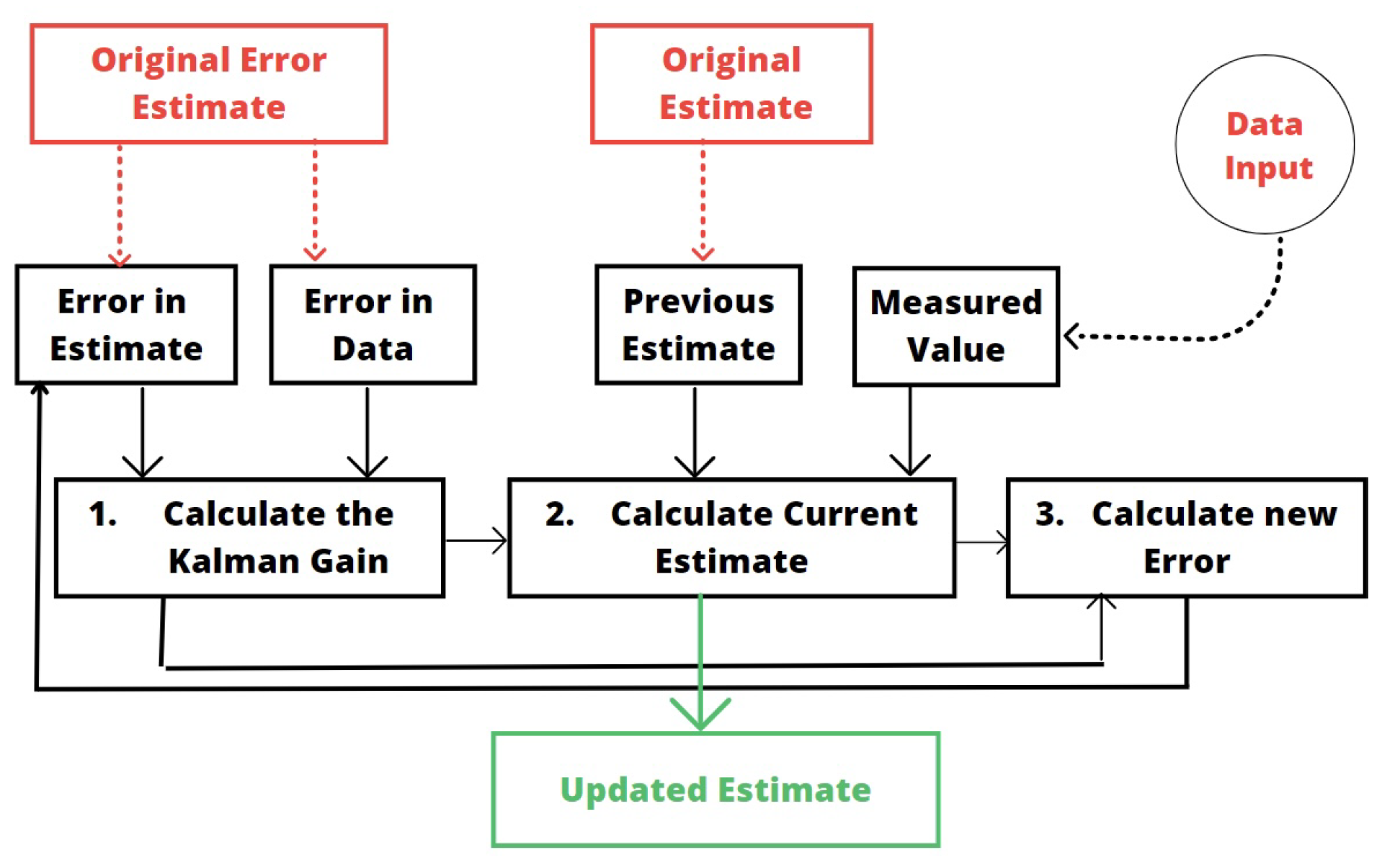
The Kalman Filter in this study has two steps:
−Predict
−Update
Where the explanation of each parameter is shown in Table 3
3. Results
In this section, we present the results of the proposed method and provide a more detailed explanation of our approach and its effects on the data. As mentioned in the Methodology section, we configured the take-off condition and added noise to the data. Figure 7 illustrates the generation of noise on the shaft speed. It is important to note that the added noise followed the patterns of the original data. This means that the noise was not random or unrelated to the underlying data patterns. By aligning the noise with the data patterns, we ensured that it did not introduce any disruptive or misleading elements to the analysis.
Furthermore, the analysis revealed that there were no outliers present in the dataset. Outliers are data points that deviate significantly from the overall pattern of the data. The absence of outliers indicates that the data was relatively consistent and reliable, allowing us to focus on the effects of the proposed methodology without any major aberrations.
Following the the addition of the noise, we applied the Linear Regression and the Kalman Filter algorithm. Figure 8 serves as an example, showcasing the results of rolling linear regression applied to the shaft speed data. In the figure, the blue line represents the referenced shaft speed (the original data), while the orange line represents the result of rolling linear regression (the prediction). Notably, Figure 8 demonstrates that our predictions exhibit accuracy even in the presence of noise, indicating the effectiveness of our approach.
Figure 9 shows the results of the rolling linear regression on noisy data. Time window 5000-time steps (500s). The linear regression parameters change with time.
Furthermore, in the subsequent section, we will discuss the performance of the DT model. The results reveal that the combined algorithms perform effectively across the majority of the parameters. Specifically, the results indicate that the combined algorithms yield a significantly lower mean squared error/mean value index. This demonstrates the improved performance achieved through the utilization of our proposed methodology.
4. Discussion and Validation
The results of this study have provided valuable insights into the performance of the suggested Digital Twin approach for a Hybrid Turboshaft Engine. Through our analysis, we have found that the DT model performs well in terms of its overall efficiency; predictions, and noise filtration. These results have provided valuable data and knowledge related to the DT topic for Hybrid Turboshaft engines for further studies and investigations. The Low error rate of the DT model indicates that this type of DT holds great potential for use in a variety of applications in the Urban Air Mobility and Advanced Air Mobility field. Additionally, this study has provided a DT modeling method that could help designers, manufacturers, and academics to work on Hybrid propulsion systems and to drive further research and development.
The evaluation of the effectiveness of using an ML recursive algorithm that consists of Rolling Linear Regression and Klaman Filter to create synthetic data that represent real-life similar behavior of the system is a crucial step in the current article. Since the reference data (simulated data) are created by the simulation approach validation through comparison with real-life data generated by a physical Hybrid Turboshaft Engine is not possible. Therefore, the suggested model was analyzed based on its overall efficiency, accuracy in prediction, and noise filtration capabilities by mean squared error / mean value index.
The standard deviation of distribution and the time window of the rolling linear regression condition are shown in Table 4:
After the application of the suggested DT model to different parameters of the Hybrid Turboshaft engine and in order to study its performance, the results of the DT predictive model and its ability to filtrate the noise with the Shaft Speed, Compressor Outlet Total Pressure, Turbine Inlet Total Pressure, Fuel Flow Rate, and Power Turbine Torque have been summarized in the function of Mean squared error/ Mean value visualized in the separated figures. Results from the Thermal Engine are shown in Figure 10, Figure 11, Figure 12, Figure 13 and Figure 14.
On the other hand, With the same simulation conditions in Table 4, the results from the Hybrid model are illustrated in Figure 15 and Figure 16.
Overall, the study provides valuable insights into the performance of the suggested DT approach for Hybrid Turboshaft Engines, as these findings would help researchers and professionals in the field to develop more effective models and further studies regarding DT technology use for Hybrid Turboshaft Engines, Urban Air Mobility, and various applications.
5. Limitations and Future Study
The main limitation of this study is the absence of real-life data from a physical entity. Therefore, the next step will be creating a test bed to perform experimental flights with a drone (equipped with a hybrid turbos-haft engine) to collect the real-life data and compare the synthetic data with the real-life one to validate the generation process. The other key future research line is employing the synthetic data for anomaly detection through bringing DT as a Service (DTaaS) in action
6. Conclusions
For both Thermal and Hybrid models, the DT model (Rolling Linear Regression+Klaman filter together) has shown efficiency in noise filtration and predictions with a lower error rate on all the parameters except with the engine torque. The low error rate indicates the great potential use of this approach in a variety of applications in the Urban Air Mobility field. while the rolling linear regression alone has shown a weaker performance as a consequence using combined ML recursive algorithms is an efficient solution to get a higher accuracy rate. This approach is showing a weak performance with the engine torque therefore the linear model isn’t optimal for the parameter. the results also show a high (mean squared error/mean value) index for the engine torque which means a weak performance in prediction and noise filtration, indicating that the used approach was not optimal for the torque. The rapid development and integration of autonomous systems, including autonomous aircraft, in urban environments raise significant ethical, safety, and social concerns. The collection and processing of large amounts of data by autonomous systems have made privacy-related concerns that potentially violate people’s privacy rights [41]. Security is also an important aspect, as autonomous systems are vulnerable to cyber-attacks and unauthorized access and require strong security measures to protect against potential threats [42]. In addition, the social impacts of autonomous systems, including unemployment and economic impacts, require careful consideration to ensure equitable distribution of benefits and mitigation of adverse impacts [43]. Addressing these ethics, privacy, security, and social implications is critical to supporting the responsible development and deployment of autonomous aircraft in urban environments.
Author Contributions
Conceptualization, A.F., A.A.A., and A.L; methodology+coding+validation+data curation, A.F., A.A.A., A.L, and A.K; , K.G. and G.P.; writing—original draft preparation, A.A.A. and A.K; writing—review and editing, A.A.A., and A.F.; supervision, A.F.; project administration, A.F., and A.L; All authors have read and agreed to the published version of the manuscript.
Data Availability Statement
Data supporting reported results can be found at https://github.com/sydalabnavid/Hybrid-Turbo-shaft-Digital-Twining-of-UAV-via-Synthetic-Data-Generation.git
Acknowledgments
The research was supported by the Ph.D. school of the University of Salento, Dep. of the complex systems engineering - XXXVI cycle; and the RIPARTI regional project - dataEnrichment for Resilient UAS (assegni di RIcerca per riPARTire con le Imprese)-POC PUGLIA FESRTFSE 2014/2020, CUP F87G22000270002. We also like to express our heartfelt gratitude to Maria Pia Romano for English proofreading of the article
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| DT | Digital Twins |
| UAV | Unmanned Aircraft Vehicles |
| UAS | Unmanned Aircraft System |
| UAM | Urban Air Mobility |
| AAM | advanced air mobility |
| CPS | Cyber-physical system |
| DTaaS | DT as a Service |
| SaaS | Software as a Service |
| VTOL | Vertical Take Off and Landing |
References
- Wei, L.; Justin, C.Y.; Briceno, S.I.; Mavris, D.N. Door-to-door travel time comparative assessment for conventional transportation methods and short takeoff and landing on demand mobility concepts. 2018 Aviation Technology, Integration, and Operations Conference, 2018, p. 3055. [CrossRef]
- Johnson, W.; Silva, C. NASA concept vehicles and the engineering of advanced air mobility aircraft. The Aeronautical Journal 2022, 126, 59–91. [Google Scholar] [CrossRef]
- Kulkarni, S.; Panicker, R.; Kadeppagari, M.; Elahi, I. Next-Gen Maintenance Framework for Urban Air Mobility Vehicles. Technical report, SAE Technical Paper, 2022. [CrossRef]
- Definition of a Digital Twin.
- Duo, W.; Zhou, M.; Abusorrah, A. A survey of cyber attacks on cyber physical systems: Recent advances and challenges. IEEE/CAA Journal of Automatica Sinica 2022, 9, 784–800. [Google Scholar] [CrossRef]
- Erkoyuncu, J.A.; del Amo, I.F.; Ariansyah, D.; Bulka, D.; Roy, R.; others. A design framework for adaptive digital twins. CIRP annals 2020, 69, 145–148. [Google Scholar] [CrossRef]
- Xiong, M.; Wang, H.; Fu, Q.; Xu, Y. Digital twin–driven aero-engine intelligent predictive maintenance. The International Journal of Advanced Manufacturing Technology 2021, 114, 3751–3761. [Google Scholar] [CrossRef]
- Hribernik, K.; Cabri, G.; Mandreoli, F.; Mentzas, G. Autonomous, context-aware, adaptive Digital Twins—State of the art and roadmap. Computers in Industry 2021, 133, 103508. [Google Scholar] [CrossRef]
- Lo, C.; Chen, C.; Zhong, R.Y. A review of digital twin in product design and development. Advanced Engineering Informatics 2021, 48, 101297. [Google Scholar] [CrossRef]
- Pons-Prats, J.; Živojinović, T.; Kuljanin, J. On the understanding of the current status of urban air mobility development and its future prospects: Commuting in a flying vehicle as a new paradigm. Transportation Research Part E: Logistics and Transportation Review 2022, 166, 102868. [Google Scholar] [CrossRef]
- Rice, S.; Winter, S.R.; Crouse, S.; Ruskin, K.J. Vertiport and air taxi features valued by consumers in the United States and India. Case Studies on Transport Policy 2022, 10, 500–506. [Google Scholar] [CrossRef]
- Song, K.; Yeo, H. Development of optimal scheduling strategy and approach control model of multicopter VTOL aircraft for urban air mobility (UAM) operation. Transportation Research Part C: Emerging Technologies 2021, 128, 103181. [Google Scholar] [CrossRef]
- Li, Z.; Ma, Y.; Wei, Z.; Ruan, S. Structured neural-network-based modeling of a hybrid-electric turboshaft engine’s startup process. Aerospace Science and Technology 2022, 128, 107740. [Google Scholar] [CrossRef]
- Donateo, T.; De Pascalis, C.L.; Strafella, L.; Ficarella, A. Off-line and on-line optimization of the energy management strategy in a Hybrid Electric Helicopter for urban air-mobility. Aerospace Science and Technology 2021, 113, 106677. [Google Scholar] [CrossRef]
- He, B.; Bai, K.J. Digital twin-based sustainable intelligent manufacturing: A review. Advances in Manufacturing 2021, 9, 1–21. [Google Scholar] [CrossRef]
- Wang, J.; Moreira, J.; Cao, Y.; Gopaluni, B. Time-Variant Digital Twin Modeling through the Kalman-Generalized Sparse Identification of Nonlinear Dynamics. 2022 American Control Conference (ACC). IEEE, 2022, pp. 5217–5222. [CrossRef]
- Zhou, X.; He, S.; Dong, L.; Atluri, S.N. Real-Time Prediction of Probabilistic Crack Growth with a Helicopter Component Digital Twin. AIAA Journal 2022, 60, 2555–2567. [Google Scholar] [CrossRef]
- Allen, B.D. Digital Twins and Living Models at NASA. NTRS Author Affiliations: Langley Research Center NTRS Meeting Information: Digital Twin Summit; 2021-11-03 to 2021-11-04; undefined NTRS Document ID: 20210023699 NTRS Research Center: Langley Research Center (LaRC).
- Butilă, E.V.; Boboc, R.G. Urban Traffic Monitoring and Analysis Using Unmanned Aerial Vehicles (UAVs): A Systematic Literature Review. Remote Sensing 2022, 14. [Google Scholar] [CrossRef]
- Gohari, A.; Ahmad, A.B.; Rahim, R.B.A.; Supa’at, A.S.M.; Abd Razak, S.; Gismalla, M.S.M. Involvement of Surveillance Drones in Smart Cities: A Systematic Review. IEEE Access 2022, 10, 56611–56628. [Google Scholar] [CrossRef]
- Hildmann, H.; Kovacs, E. Review: Using Unmanned Aerial Vehicles (UAVs) as Mobile Sensing Platforms (MSPs) for Disaster Response, Civil Security and Public Safety. Drones 2019, 3. [Google Scholar] [CrossRef]
- Reynoso Vanderhorst, H.; Suresh, S.; Renukappa, S.; Heesom, D. UAS application for urban planning development, 2021. The field of Unmanned Aerial Systems or Drones is still under development by the challenges of regulation and technology readiness for certain applications. The application of emerging technologies and robotics incites the growth of productivity on repetitive and exhaustive tasks for human and represent a rapid solution for data collection methods. The UAS presents opportunities to contribute and carry out urban planning tasks in a reduced time and risks, and appropriately supportive for COVID19. Therefore, a case study is presented to illustrate the process of UAS data collection and conclusions drawn for delimitating urban communities. [CrossRef]
- Gillis, D.; Petri, M.; Pratelli, A.; Semanjski, I.; Semanjski, S. Urban Air Mobility: A State of Art Analysis. Computational Science and Its Applications – ICCSA 2021; Gervasi, O., Murgante, B., Misra, S., Garau, C., Blečić, I., Taniar, D., Apduhan, B.O., Rocha, A.M.A., Tarantino, E., Torre, C.M., Eds.; Springer International Publishing: Cham, 2021; pp. 411–425. [Google Scholar] [CrossRef]
- Causa, F.; Franzone, A.; Fasano, G. Strategic and Tactical Path Planning for Urban Air Mobility: Overview and Application to Real-World Use Cases. Drones 2023, 7. [Google Scholar] [CrossRef]
- Fraser, B.; Al-Rubaye, S.; Aslam, S.; Tsourdos, A. Enhancing the Security of Unmanned Aerial Systems using Digital-Twin Technology and Intrusion Detection. 2021 IEEE/AIAA 40th Digital Avionics Systems Conference (DASC), 2021, pp. 1–10. ISSN: 2155-7209. [CrossRef]
- Iqbal, D.; Buhnova, B. Model-based Approach for Building Trust in Autonomous Drones through Digital Twins. 2022 IEEE International Conference on Systems, Man, and Cybernetics (SMC), 2022, pp. 656–662. ISSN: 2577-1655. [CrossRef]
- Shen, G.; Lei, L.; Li, Z.; Cai, S.; Zhang, L.; Cao, P.; Liu, X. Deep Reinforcement Learning for Flocking Motion of Multi-UAV Systems: Learn From a Digital Twin 2022. 9, 11141–11153. Conference Name: IEEE Internet of Things Journal. [CrossRef]
- Miao, J.; Zhang, P. UAV Visual Navigation System based on Digital Twin. 2022 18th International Conference on Mobility, Sensing and Networking (MSN), pp. 865–870. [CrossRef]
- Madni, A.M.; Erwin, D.; Madni, C.C. Digital Twin-enabled MBSE Testbed for Prototyping and Evaluating Aerospace Systems: Lessons Learned. 2021 IEEE Aerospace Conference (50100), 2021, pp. 1–8. ISSN: 1095-323X. [CrossRef]
- Esposito, A.; Lo Iacono, F.; Orlando, C.; Navarra, G.; Alaimo, A. Whole body vibration during simulated flight via uncertain models and interval analysis. Mechanics of Advanced Materials and Structures 2022. pp. 1–10. [Google Scholar] [CrossRef]
- Aheleroff, S.; Xu, X.; Zhong, R.Y.; Lu, Y. Digital Twin as a Service (DTaaS) in Industry 4.0: An Architecture Reference Model. Advanced Engineering Informatics 2021, 47, 101225. [Google Scholar] [CrossRef]
- Dietz, M.; Putz, B.; Pernul, G. A Distributed Ledger Approach to Digital Twin Secure Data Sharing. Data and Applications Security and Privacy XXXIII; Foley, S.N., Ed.; Springer International Publishing: Cham, 2019; pp. 281–300. [Google Scholar] [CrossRef]
- Raes, L.; Michiels, P.; Adolphi, T.; Tampere, C.; Dalianis, A.; McAleer, S.; Kogut, P. DUET: A Framework for Building Interoperable and Trusted Digital Twins of Smart Cities. IEEE Internet Computing 2022, 26, 43–50. [Google Scholar] [CrossRef]
- CHİODO, L.S.; DONATEO, T.; Ficarella, A. Effect of Coordination on Transient Response of a Hybrid Electric Propulsion System. International Journal of Aviation Science and Technology 2022, 3, 4–12. [Google Scholar] [CrossRef]
- Aoki, M. State space modeling of time series; Universitext, Springer: Berlin, Germany, 1990. [Google Scholar] [CrossRef]
- Bay, J.S. Fundamentals of linear state space systems; McGraw-Hill International Editions Series; Irwin Professional Publishing: Maidenhead, England, 1998. [Google Scholar]
- Abughali, A.; Habash, O.; Elshamy, A.; Alansari, M.; Alhammadi, K. Design and Analysis of a Linear Controller for Parrot AR Drone 2.0. 2022 International Conference on Electrical and Computing Technologies and Applications (ICECTA). IEEE, 2022. [CrossRef]
- Nejad, H.H.; Sauter, D.; Aberkane, S. On-line scheduling and fault detection in NCS with communication constraints in Drone application. 2010 Conference on Control and Fault-Tolerant Systems (SysTol). IEEE, 2010. [CrossRef]
- Gehrig, Daniel.; Göttgens, Maximilian.; Paden, Brian.; Frazzoli, Emilio. Scale-Corrected Monocular-SLAM for the AR.Drone 2.0 2017. [CrossRef]
- Jaw, L.; Mattingly, J. Aircraft engine controls; American Institute of Aeronautics and Astronautics New York, NY, USA, 2009.
- Azam, N.; Michala, L.; Ansari, S.; Truong, N.B. Data Privacy Threat Modelling for Autonomous Systems: A Survey From the GDPR’s Perspective. IEEE Transactions on Big Data 2023, 9, 388–414. [Google Scholar] [CrossRef]
- Rani, C.; Modares, H.; Sriram, R.; Mikulski, D.; Lewis, F.L. Security of unmanned aerial vehicle systems against cyber-physical attacks. The Journal of Defense Modeling and Simulation 2016, 13, 331–342. [Google Scholar] [CrossRef]
- İşcan, E. An Old Problem in the New Era: Effects of Artificial Intelligence to Unemployment on the Way to Industry 5.0. Yaşar Üniversitesi E-Dergisi 2021, 16, 77–94. [Google Scholar] [CrossRef]
Figure 1.
The published research on digital twin in terms of subdomains of aerospace engineering
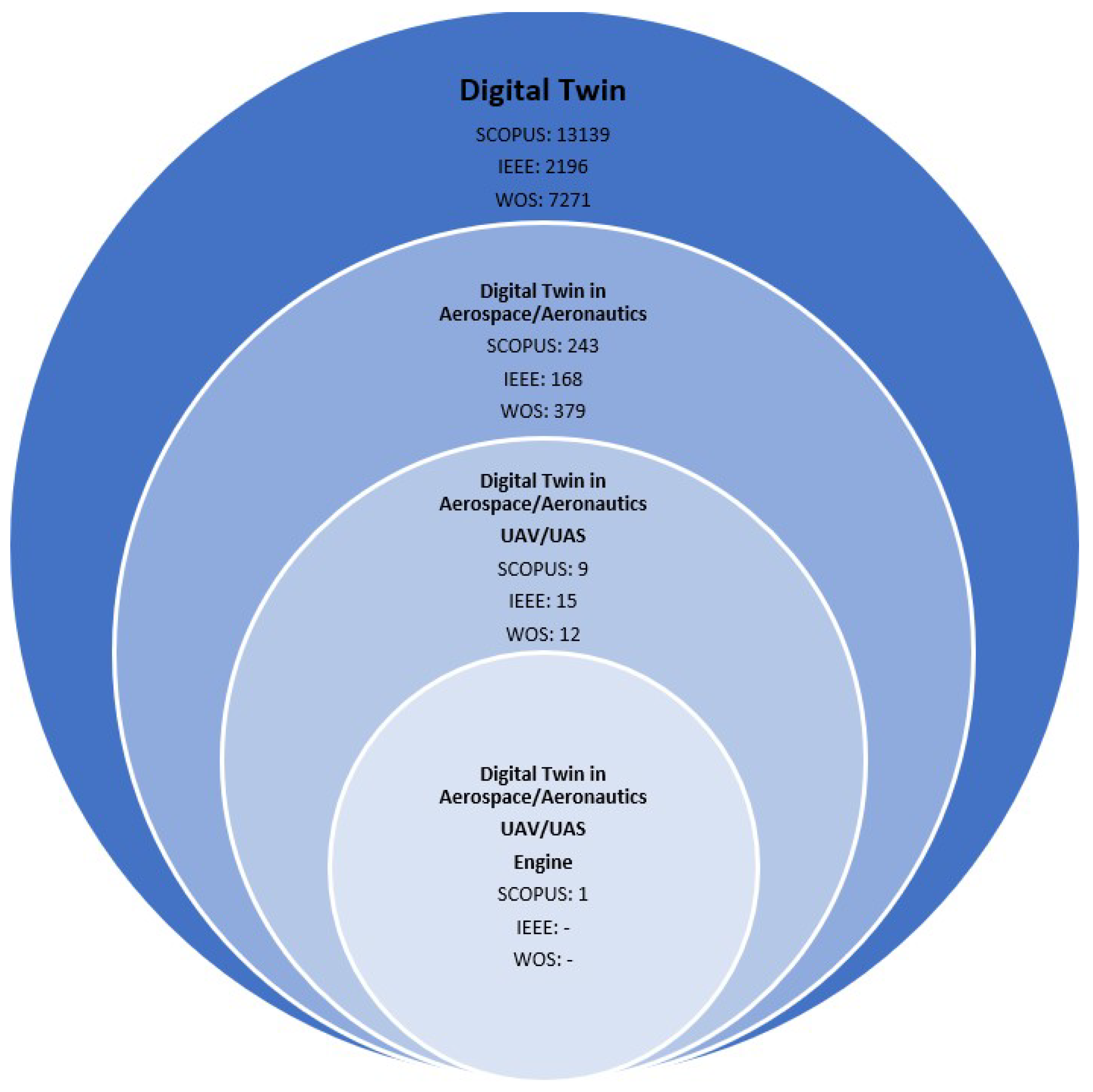
Figure 2.
Hybrid Electric Propulsion System model flow chart [34].
Figure 2.
Hybrid Electric Propulsion System model flow chart [34].
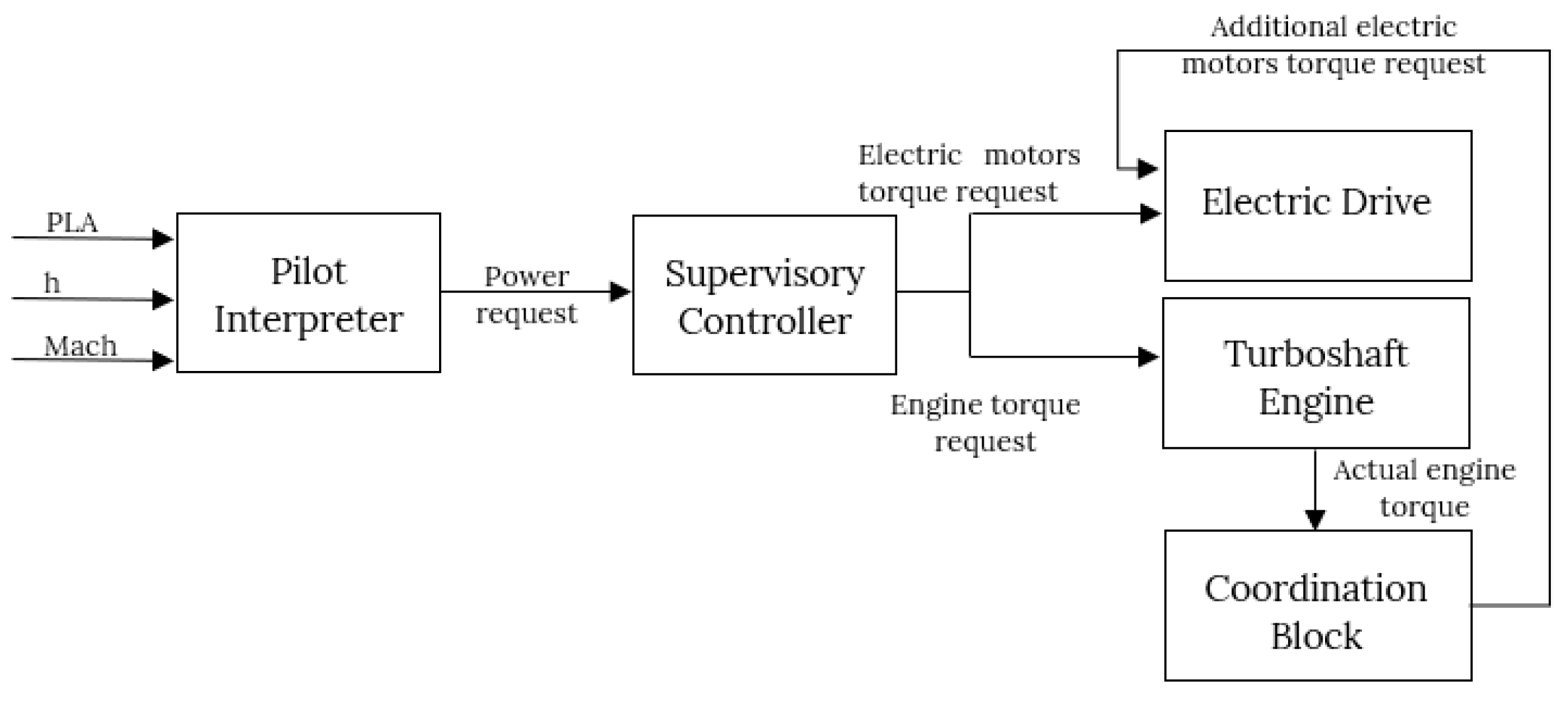
Figure 3.
Overview of the hybrid electric power systems. The blue arrows illustrate the communication Between DT and the Supervisory system with the other entities of the system like torque set points, battery state, data from IoT embedded sensors in the system, etc. The concept of the system is driven from [14].
Figure 3.
Overview of the hybrid electric power systems. The blue arrows illustrate the communication Between DT and the Supervisory system with the other entities of the system like torque set points, battery state, data from IoT embedded sensors in the system, etc. The concept of the system is driven from [14].
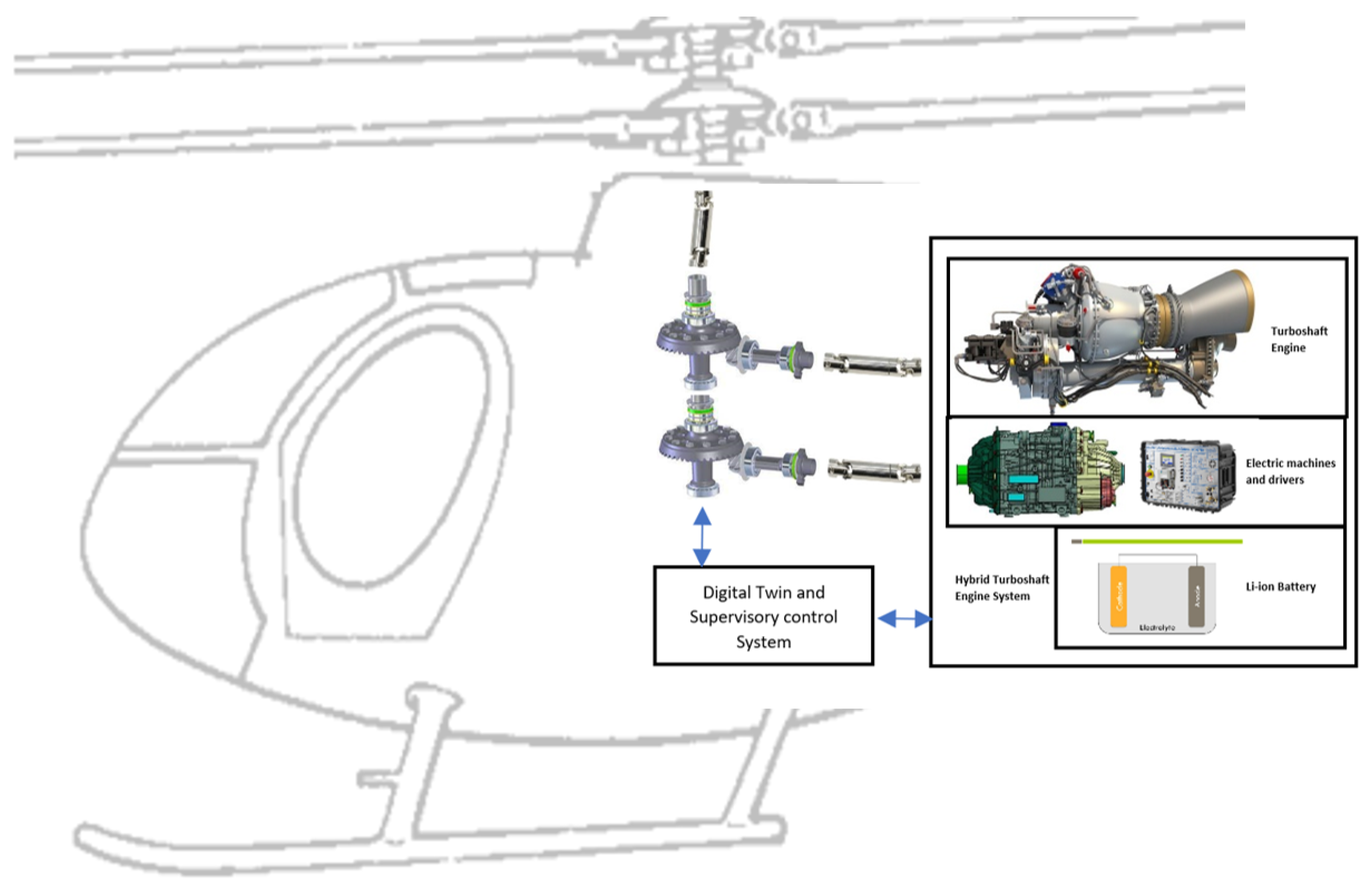
Figure 4.
The behavior of the velocity, pressure, and power along the mission.
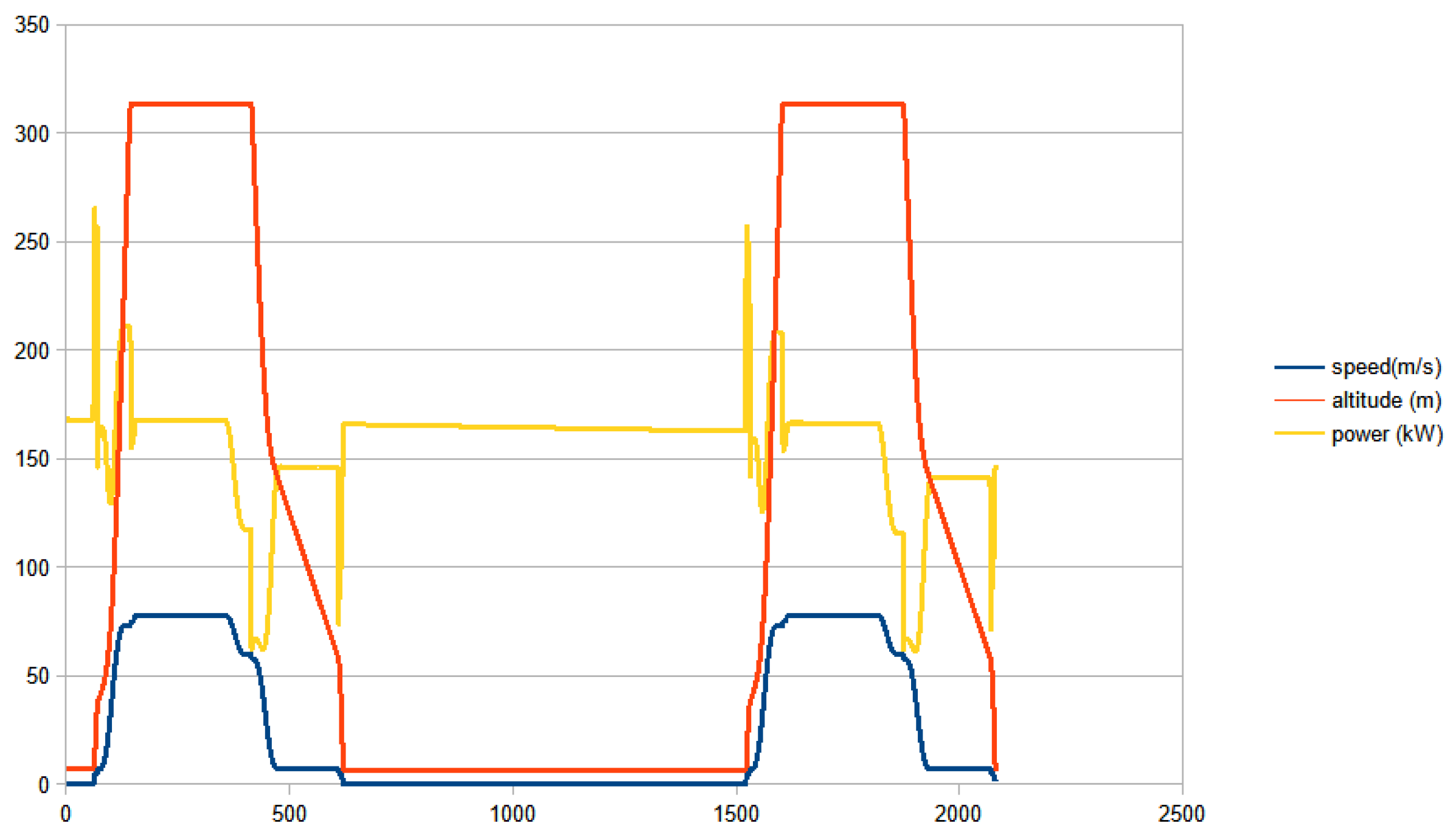
Figure 5.
Outline of the steps for Rolling Linear Regression.
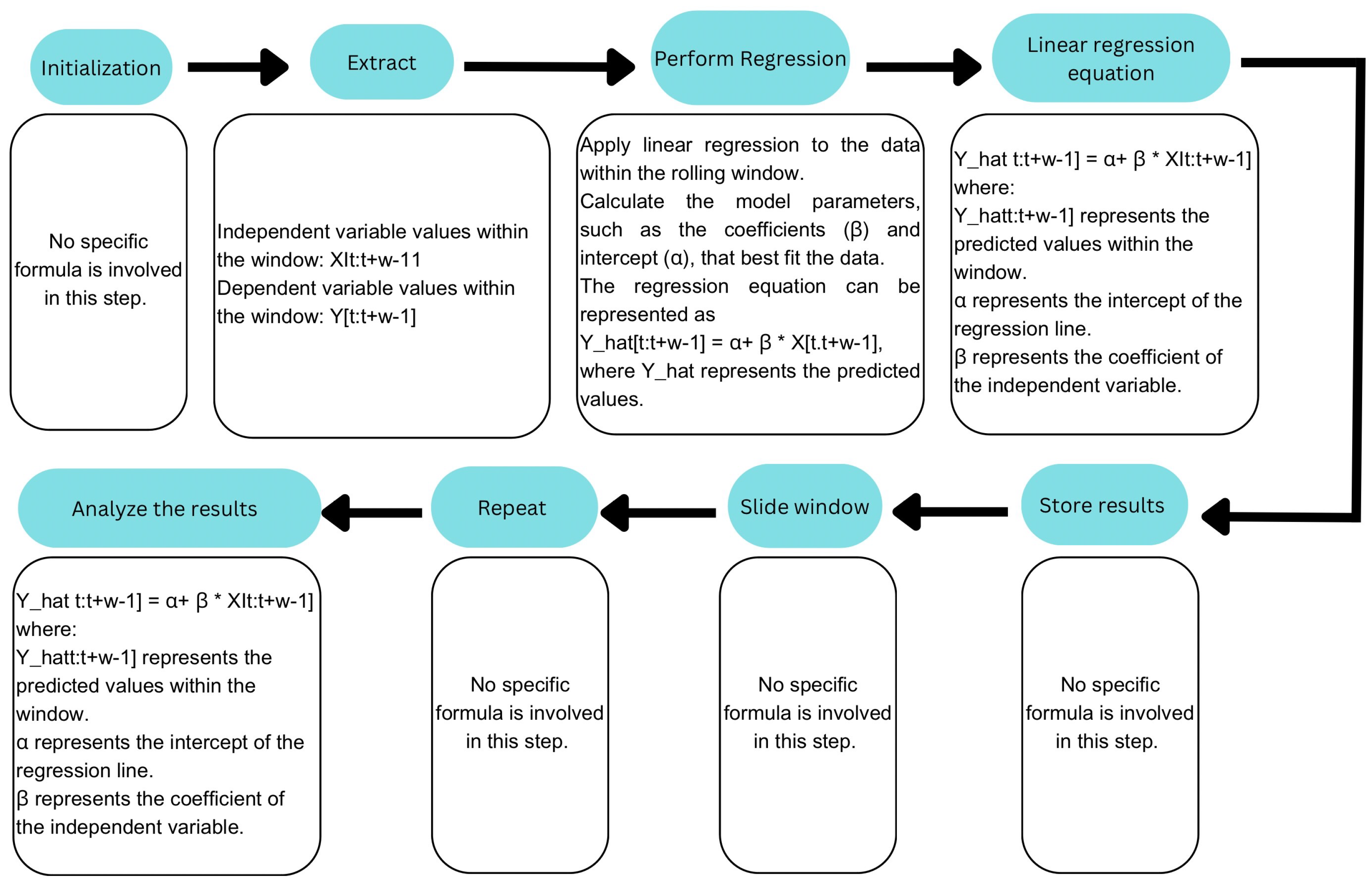
Figure 7.
Shaft speed with added noise.
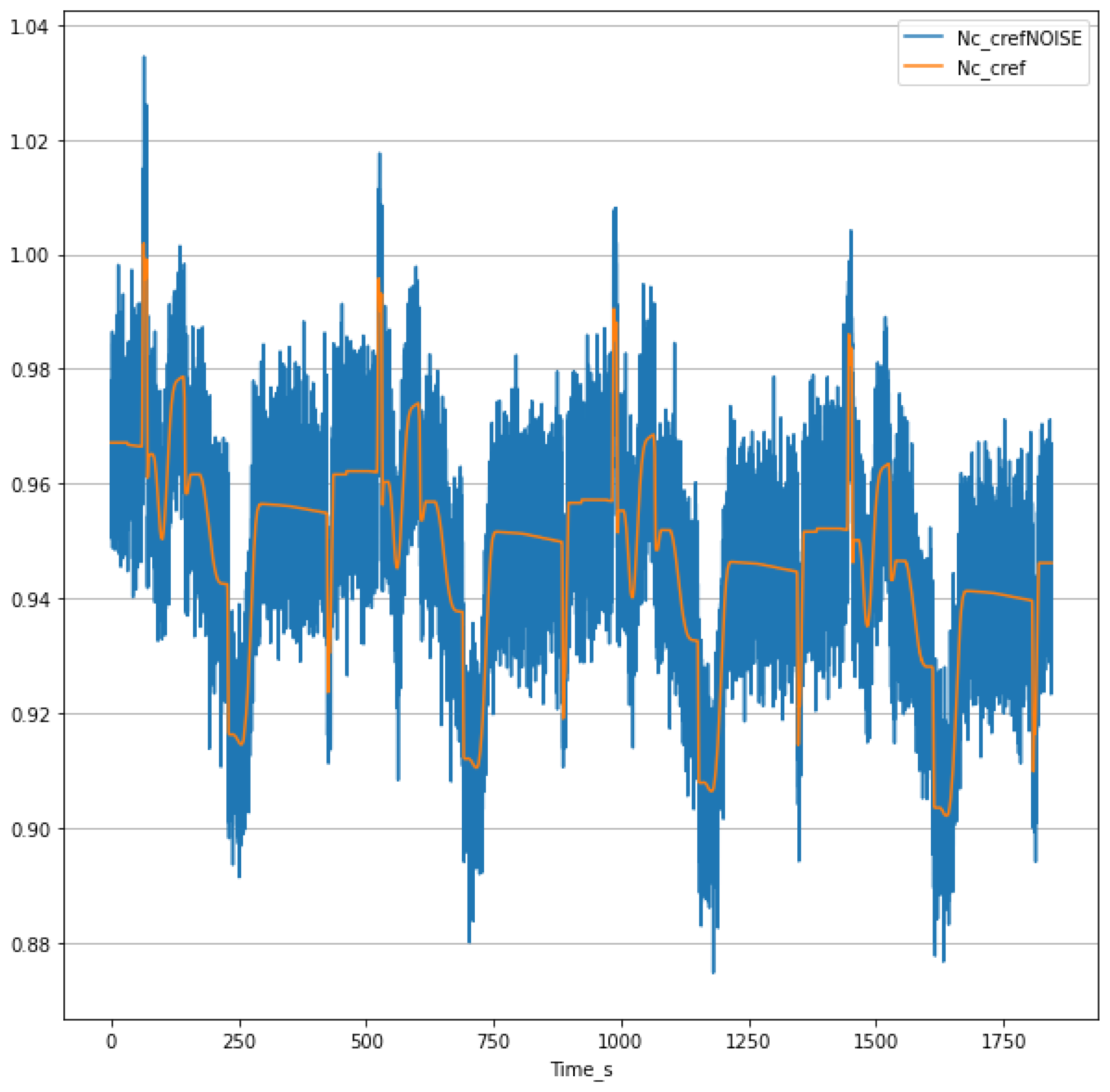
Figure 8.
Results of rolling linear regression for shaft speed
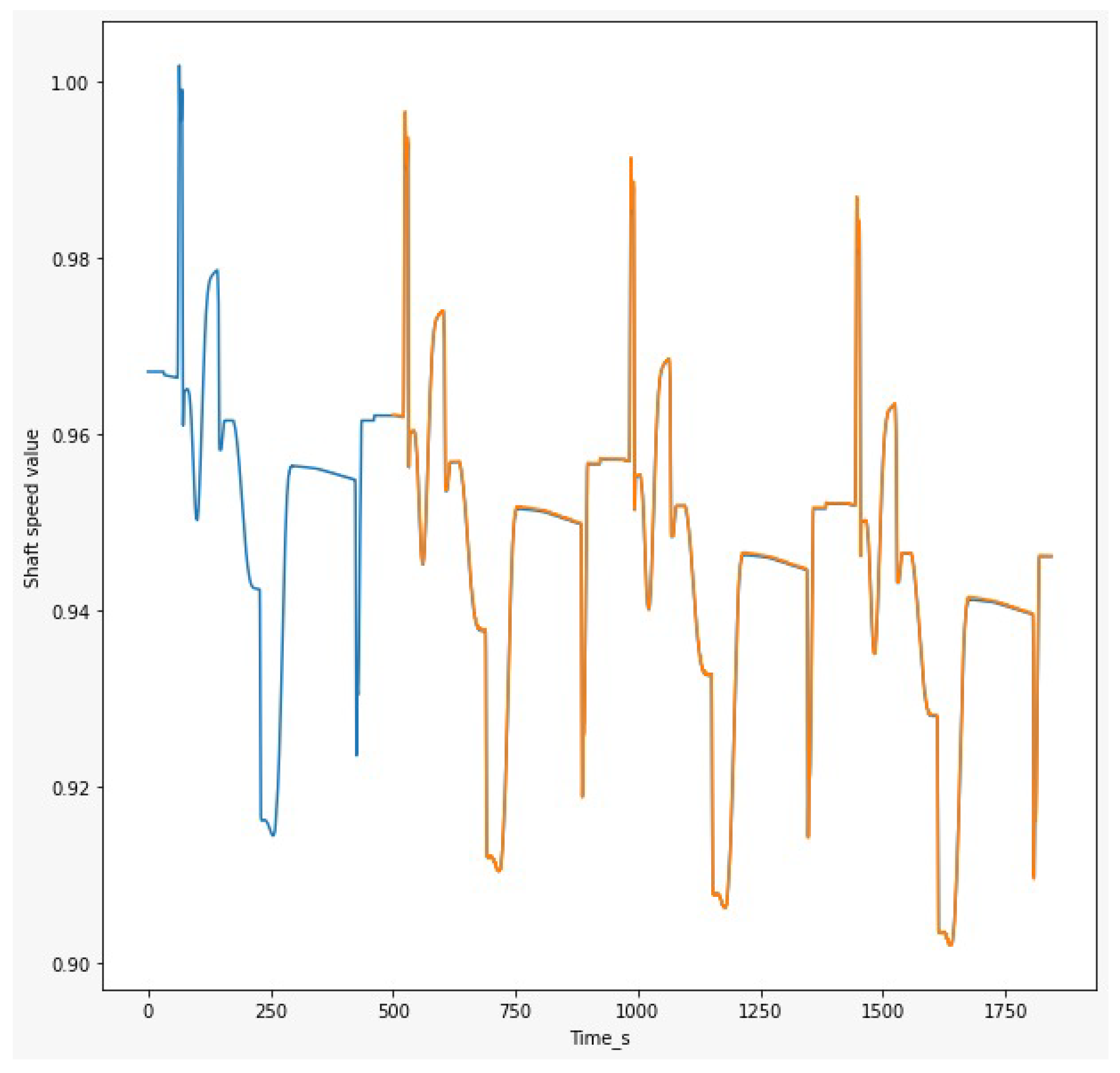
Figure 9.
Rolling linear regression on noisy data
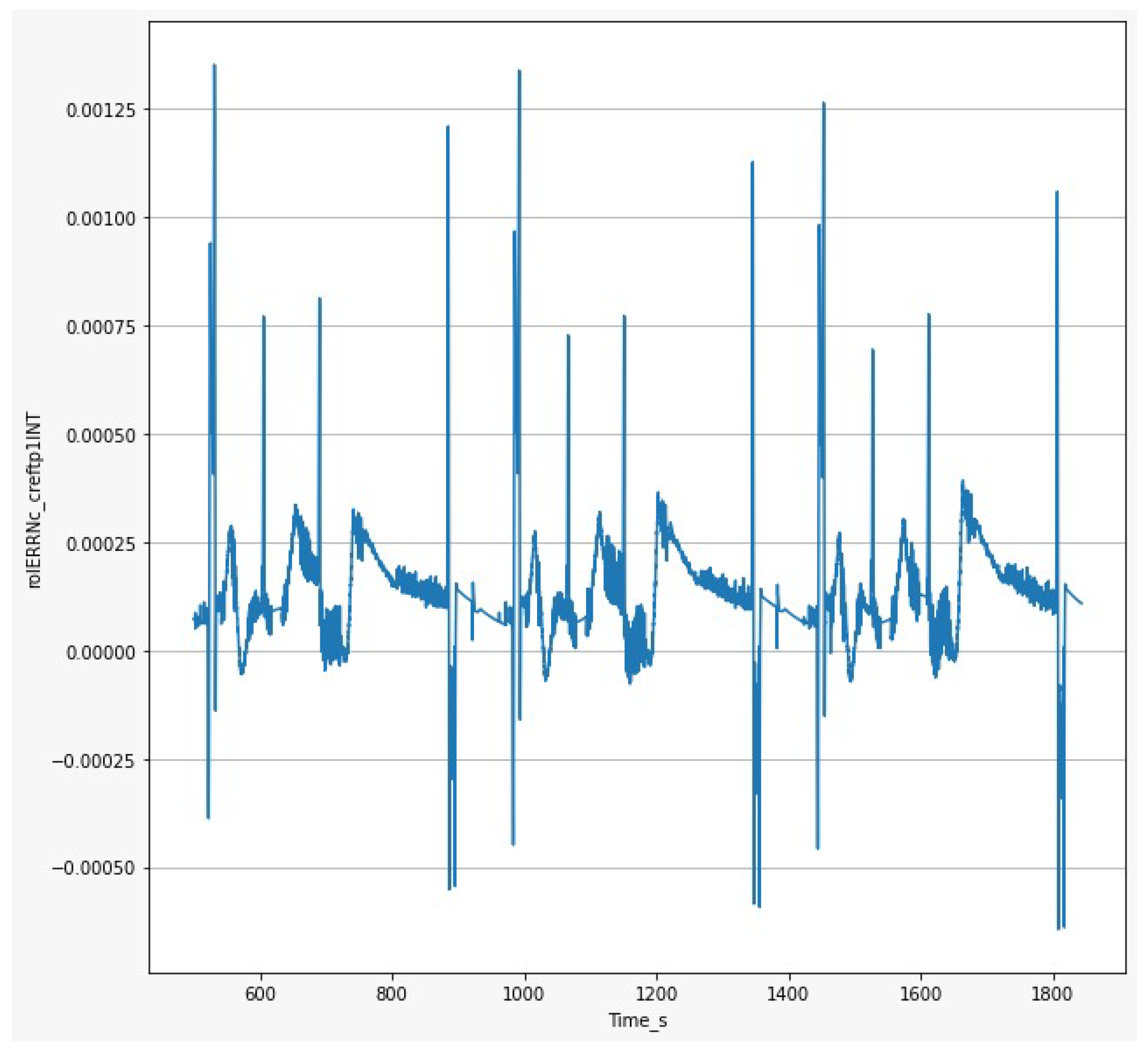
Figure 10.
high-pressure spool speed.
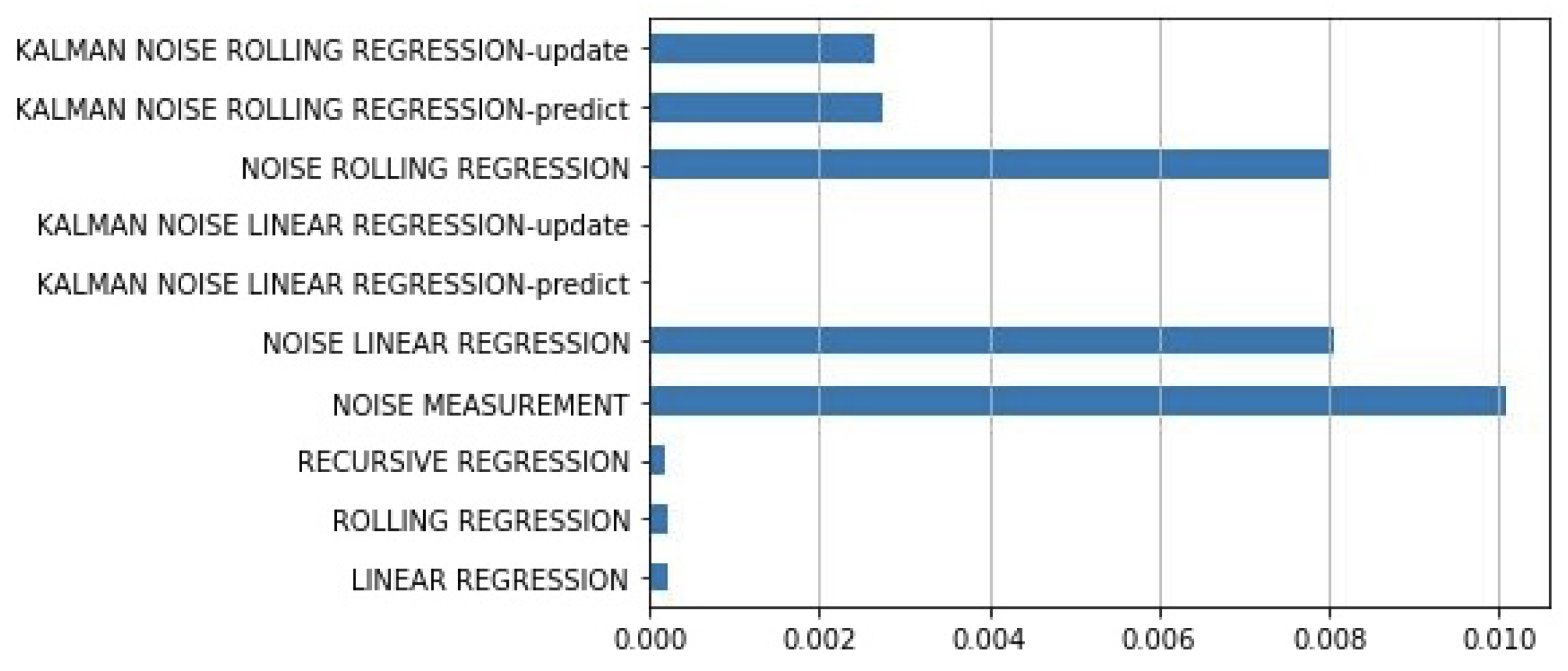
Figure 11.
compressor outlet total pressure.
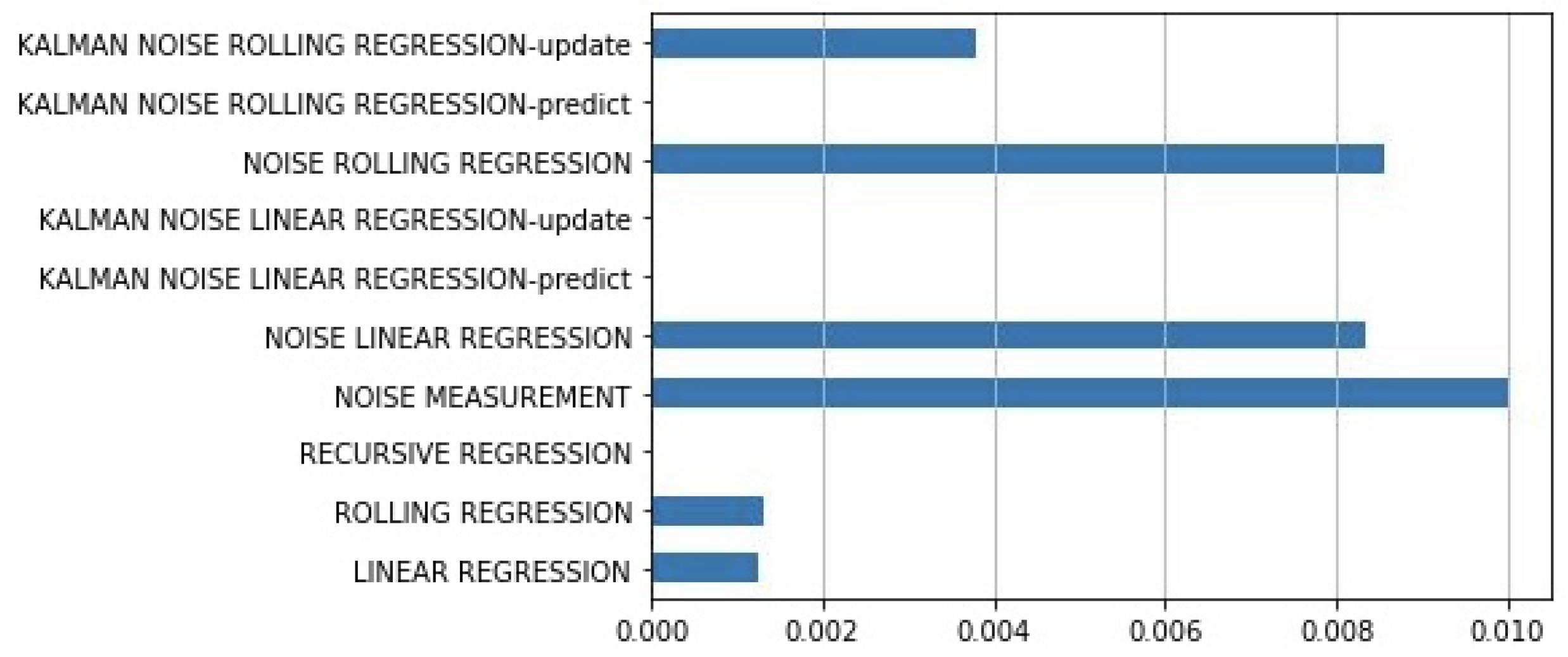
Figure 12.
turbine inlet total temperature.
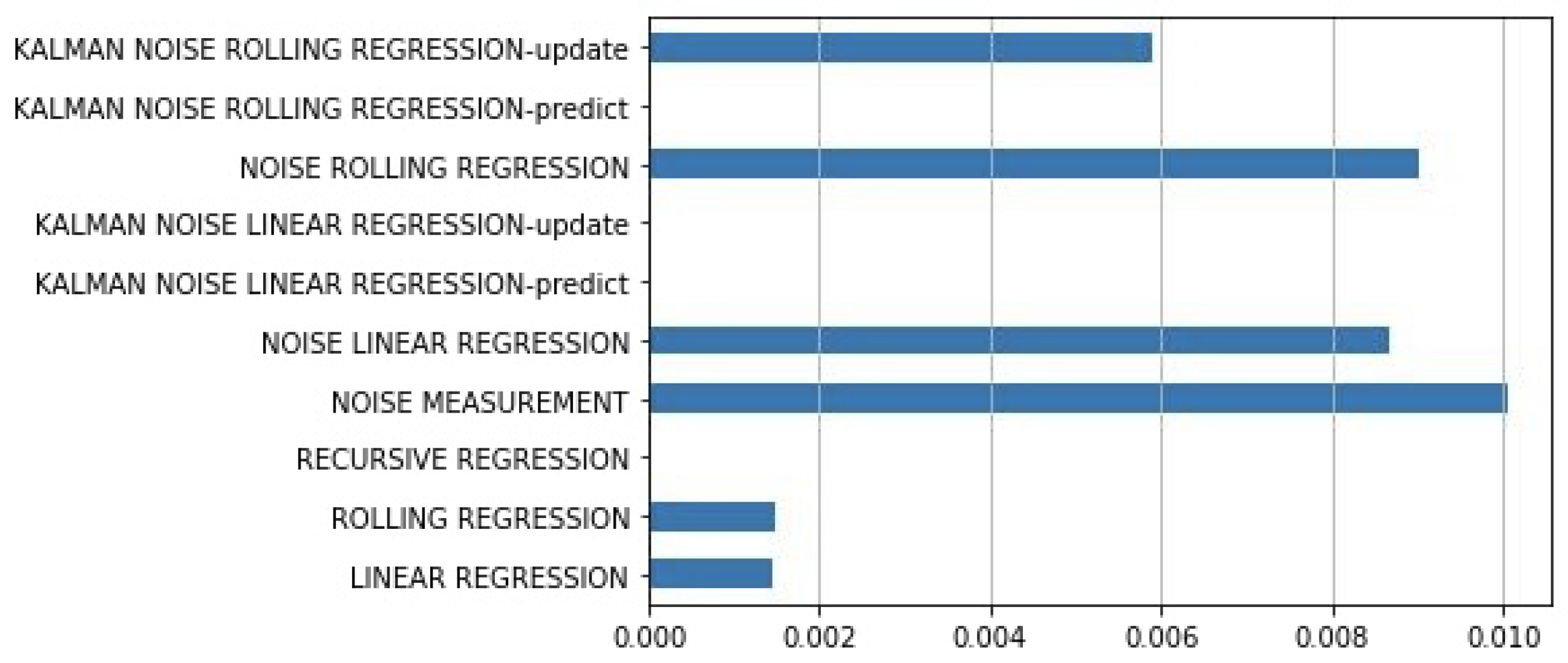
Figure 13.
fuel flow rate.
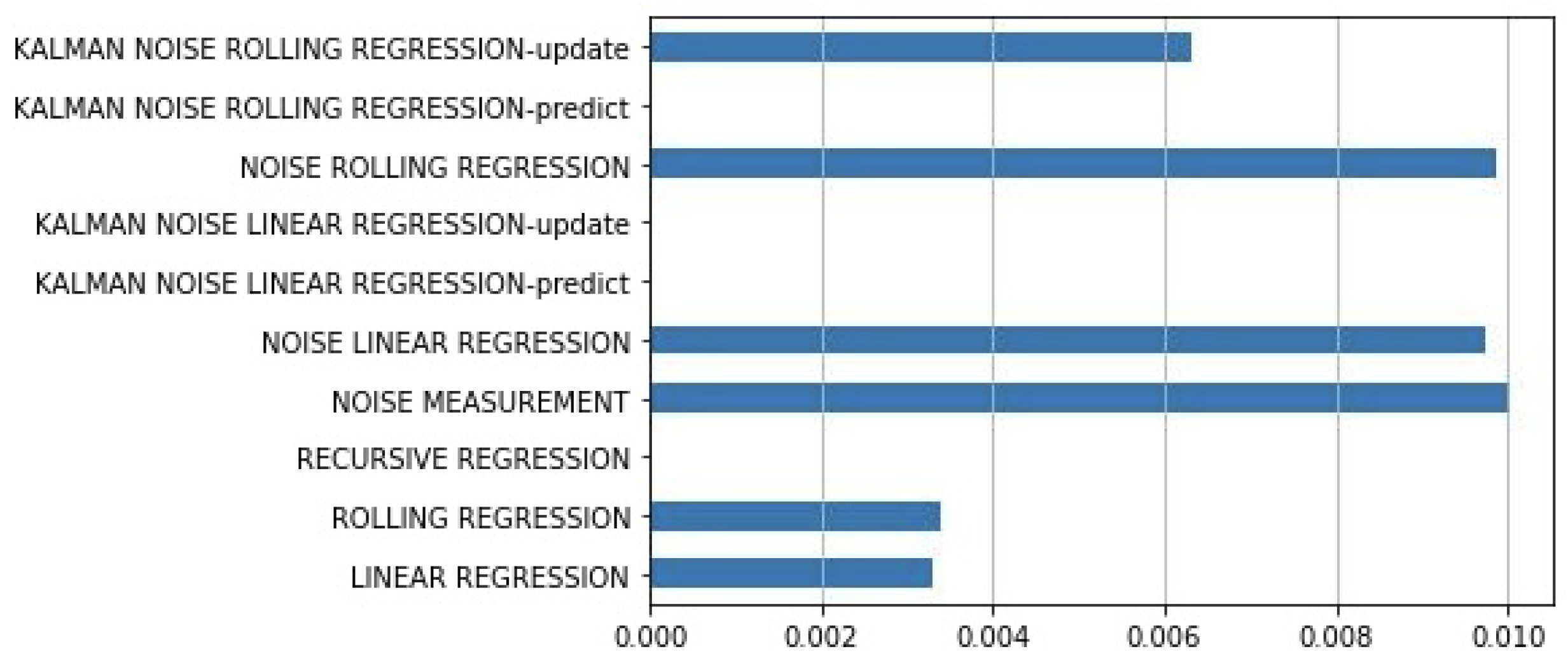
Figure 14.
power turbine torque.
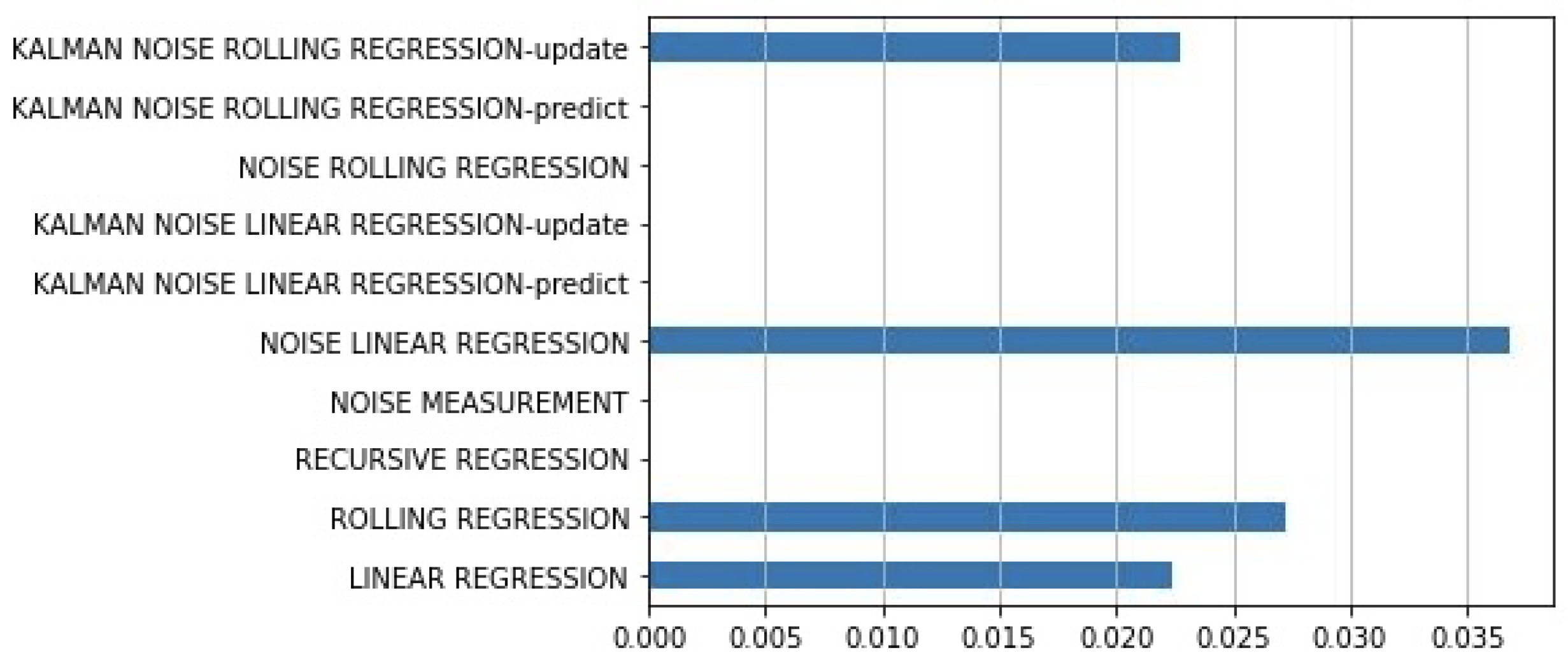
Figure 15.
fuel flow rate.
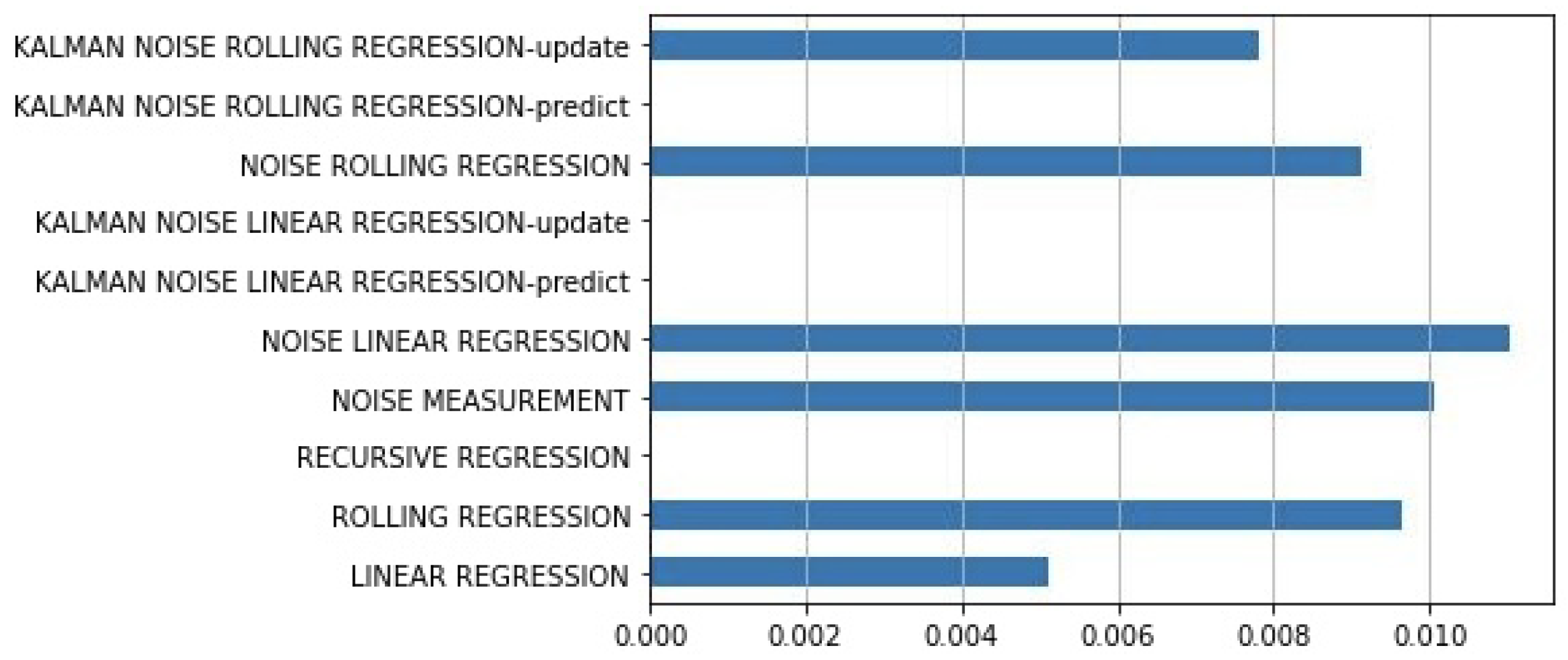
Figure 16.
power turbine torque.
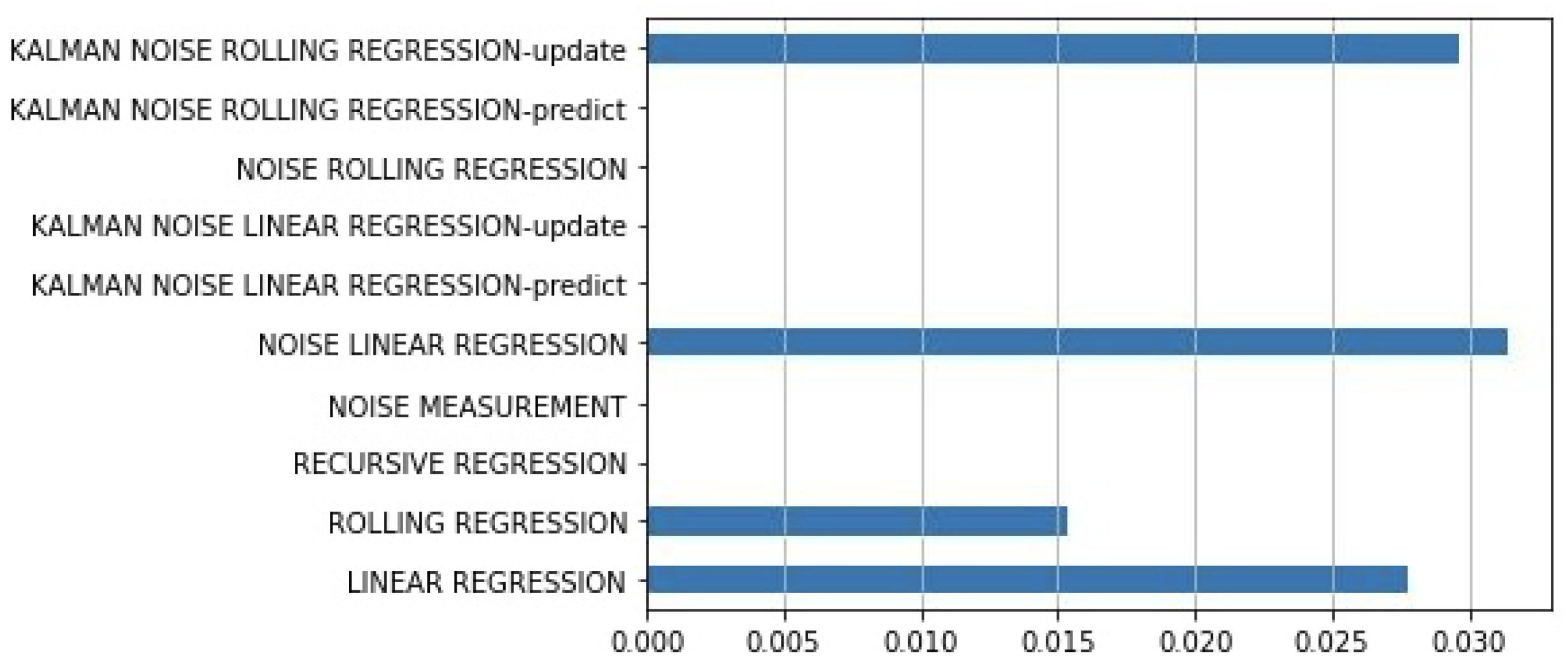

Table 1.
Simulated mission.
| TIMES (S) | SPEED (m\s) | ALTITUDE (m) | POWER (kW) | |
| MISSION A START | 0.1 | 30.6 | 0 | 48 |
| MISSION A END | 1650 | 30.6 | 0 | 48 |
| MISSION B START | 0.1 | 0 | 1150 | 172 |
| MISSION B END | 1246 | 1 | 1149 | 152 |
| MISSION C START | 0.1 | 0 | 7 | 168 |
| MISSION C END | 2079 | 1.59 | 6.22 | 147 |
| MISSION D START | 0.1 | 0 | 7 | 168 |
| MISSION D END | 935 | 1.54 | 6.41 | 151 |
Table 2.
Engine Parameters
| Parameter | Explanation |
|---|---|
| High pressure spool speed | |
| Referenced parameter value to the take-off condition | |
| Measured value of the parameter | |
| Predicted value of the parameter | |
| Compressor outlet total pressure | |
| Referenced parameter value to the take-off condition | |
| Measured value of the parameter | |
| Predicted value of the parameter | |
| Turbine inlet total temperature | |
| Referenced parameter value to the take-off condition | |
| Measured value of the parameter | |
| Predicted value of the parameter | |
| Fuel flow rate | |
| Referenced parameter value to the take-off condition | |
| Measured value of the parameter | |
| Predicted value of the parameter | |
| Measured and refrenced (to the take-off condition )power level angle. | |
| Measured torque value |
Table 3.
Parameters explanation
| Parameter | Explanation |
|---|---|
| Updated High pressure spool speed | |
| Updated Compressor outlet total pressure | |
| Updated Turbine inlet total temperature | |
| Updated Fuel flow rate | |
| State transition model | |
| Control-input model | |
| Observation model | |
| Process noise | |
| Observation noise |
Table 4.
Gaussian distribution and rolling linear regression parameters
| parameter | value |
| sigma (standard deviation of distribution) | 0.1 |
| time window | 5000 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



