Submitted:
09 June 2026
Posted:
11 June 2026
You are already at the latest version
Abstract
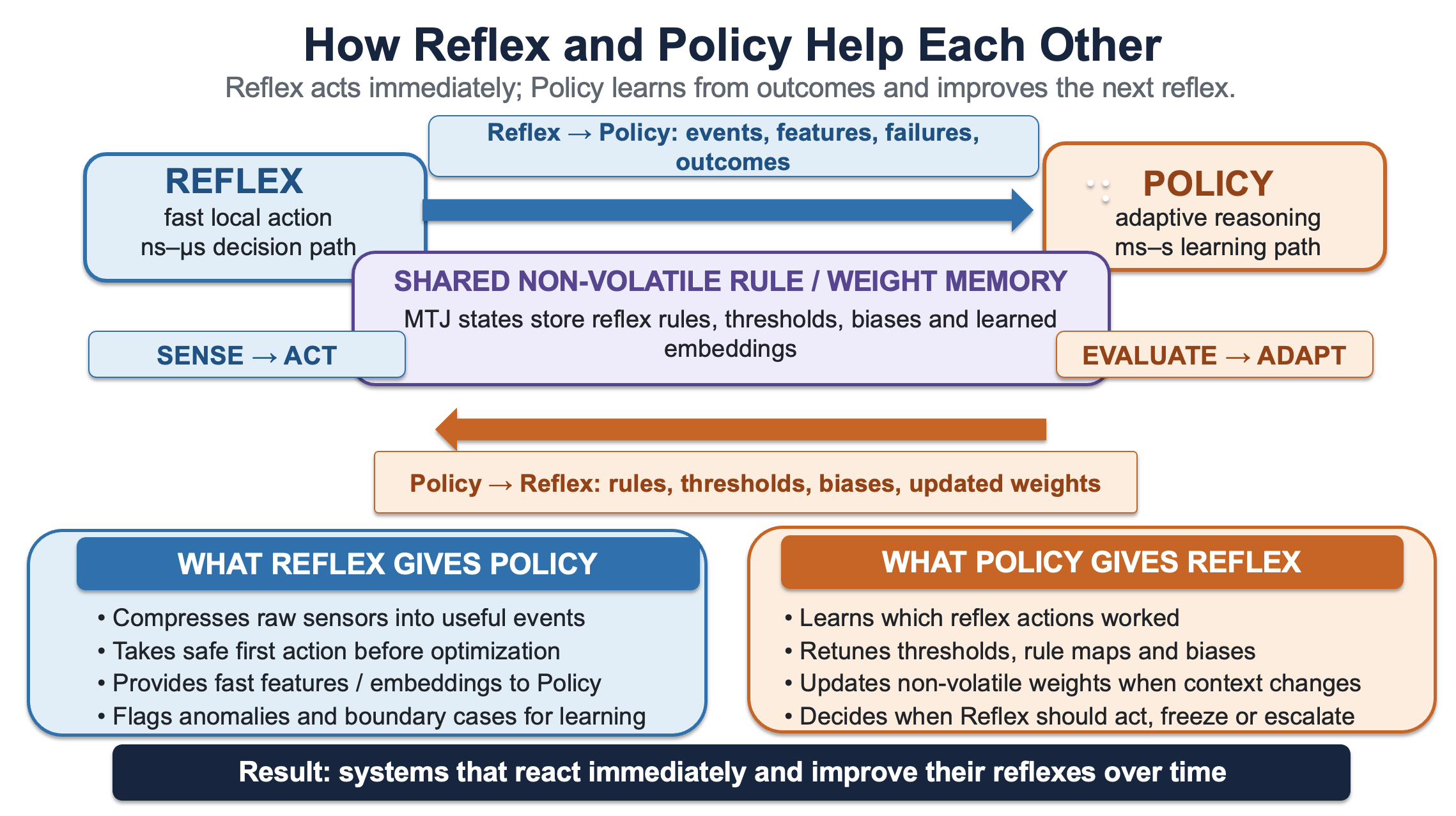
Physical AI systems must respond to real-world events under strict constraints of time, energy and safety. This Perspective clarifies the distinct roles of latency, throughput, bandwidth and world models within a Reflex–Policy architecture and argues that increasingly powerful policy and world models do not eliminate the need for well-designed local reflex layers. On the contrary, reflex layers can dramatically reduce upstream data rates, preserve hard real-time safety, and allow policy models to focus on prediction, planning and rare events. A binary spintronic reflex crossbar has been demonstrated in proof-of-concept form for fast shadow bypass in photovoltaic systems and for battery cell balancing, confirming that non-volatile magnetic rule fabrics can perform sub-millisecond, parallel switching decisions in real physical domains. Multilevel spintronic devices align better with weighted inference on the policy side. Quantitative examples from robotics, automotive and energy systems illustrate how this layered approach can reduce communication bandwidth by 1–3 orders of magnitude while maintaining safety and efficiency. A comparison with existing real-time control technologies, safety microcontrollers, FPGAs and neuromorphic processors, clarifies where spintronic reflexes offer distinct advantages in standby power, non-volatility and inspectable rule logic.
Keywords:
Physical AI
; reflex-policy architecture
; latency
; throughput
; bandwidth
; world models
; spintronics
; MTJ
; MRAM
; robotics
; automotive
; energy systems
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



