Submitted:
11 February 2026
Posted:
12 February 2026
You are already at the latest version
Abstract
The development of cutting-edge vehicle communication technology targeted at enhancing road safety, traffic efficiency, and autonomous mobility has been expedited by the emergence of intelligent transportation systems. Direct wireless connection between vehicles is made possible via vehicle-to-vehicle (V2V) communication, which speeds up the exchange of vital safety data like speed, trajectory, braking status, and road conditions. By incorporating Artificial Intelligence (AI) into V2V networks, predictive skills are improved, enabling cars to foresee possible risks and react proactively as opposed to reactively.With an emphasis on its operational architecture, supporting technologies, recent research advancements, and future network paradigms, this study provides a thorough scientific overview of V2V communication. The report demonstrates how next-generation wireless technologies, edge computing, and AI-driven analytics are converting vehicle networks into intelligent safety ecosystems. Important issues are also looked at, such as interoperability, scalability, cyber security hazards, and latency limitations. The study comes to the conclusion that AI-enabled V2V communication will be a key component of completely autonomous and accident-free transportation systems.
Keywords:
vehicle-to-vehicle communication
; artificial intelligence
; intelligent transportation systems
; 5G
; Autonomous vehicles
; edge computing
; URLLC
; smart mobility
1. Introduction
Traffic density has dramatically increased due to the fast growth of motorization and urbanization, which has raised accident rates and resulted in inefficient transportation. The majority of traffic accidents are caused by human mistake, according to international transportation research, which highlights the necessity of intelligent safety systems that can reduce reliance on drivers.[1]
Cars may now create decentralized wireless networks for real-time information sharing thanks to a game-changing technology called vehicle-to-vehicle (V2V) communication. By facilitating cooperative awareness among cars, V2V improves reaction time and lowers the likelihood of collisions, in contrast to traditional safety systems that mostly rely on driver perception.
The potential of V2V networks has been further enhanced by recent developments in artificial intelligence, which have brought automated risk assessment, adaptive decision-making and predictive analytics. For next-generation autonomous cars, which need extremely dependable and low-latency connectivity, these features are especially important. [2]
The functioning processes of V2V communication, current research trends, and upcoming technical advancements are all included in this article's scientific study.
2. Working Principles of Vehicle-To-Vehicle Communication
V2V communication is based on ad-hoc wireless networking, where each vehicle acts as a transmitter and a receiver in a dynamic environment. Vehicle-to-vehicle (V2V) communication's operational framework is built on intelligent risk assessment, real-time data transfer, and ongoing environmental monitoring to increase traffic safety.[3] The process begins with sophisticated onboard sensors that systematically record critical vehicle data such as heading direction, acceleration, velocity, and spatial positioning. These sensors generate high-frequency data streams that display the dynamic conditions of the vehicle and its surroundings. The collected data is then routinely transmitted to neighboring vehicles via short-range wireless communication techniques, ensuring consistent connectivity and minimal delay in the vehicular network. After obtaining these data packets, vehicles employ advanced algorithms to evaluate and analyze risks in real time. [4] Machine learning-based algorithms and decision-making frameworks are used to interpret data from many vehicles in order to forecast potential hazards, spot unusual driving behaviors, and assess the chance of crashes. When the technology detects a safety danger that exceeds preset thresholds, it immediately notifies the driver with warning warnings.[5] In cars that are semi-autonomous or completely driverless, the framework can also initiate preventive control functions including automated emergency braking, adaptive speed adjustment, and lane correction. This closed-loop communication and reaction mechanism significantly reduces the chance of accidents and improves overall traffic efficiency by transforming traditional reactive safety tactics into proactive measures.[6]
Needs for Communication Highly dependable and effective communication networks are necessary for safety-critical vehicle applications in order to guarantee quick and secure data transmission between vehicles. Because even little delays can raise the risk of accidents in high-speed environments, ultra-low latency is necessary to provide immediate responses. In a similar vein, continuous delivery of safety signals like brake alerts and collision warnings requires great reliability.[7]
Another crucial prerequisite is scalability, since communication systems must continue to operate steadily even when there is heavy traffic and several cars are using the network at once. Additionally, in order to handle increasing data transmission demands while managing limited wireless bandwidth, effective spectrum utilization is essential. By anticipating network congestion and dynamically adjusting communication parameters, artificial intelligence further improves these capabilities, boosting network performance and guaranteeing safer transportation systems.[8]
Highly dependable and effective communication networks are necessary for safety-critical vehicle applications in order to guarantee quick and secure data transmission between vehicles. Because even little delays can raise the risk of accidents in high-speed environments, ultra-low latency is necessary to provide immediate responses. In a similar vein, continuous delivery of safety signals like brake alerts and collision warnings requires great reliability.
Another crucial prerequisite is scalability, since communication systems must continue to operate steadily even when there is heavy traffic and several cars are using the network at once. Additionally, in order to handle increasing data transmission demands while managing limited wireless bandwidth, effective spectrum utilization is essential. By anticipating network congestion and dynamically adjusting communication parameters, artificial intelligence further improves these capabilities, boosting network performance and guaranteeing safer transportation systems.[9]
3. System Architecture of Ai-Driven V2v Networks
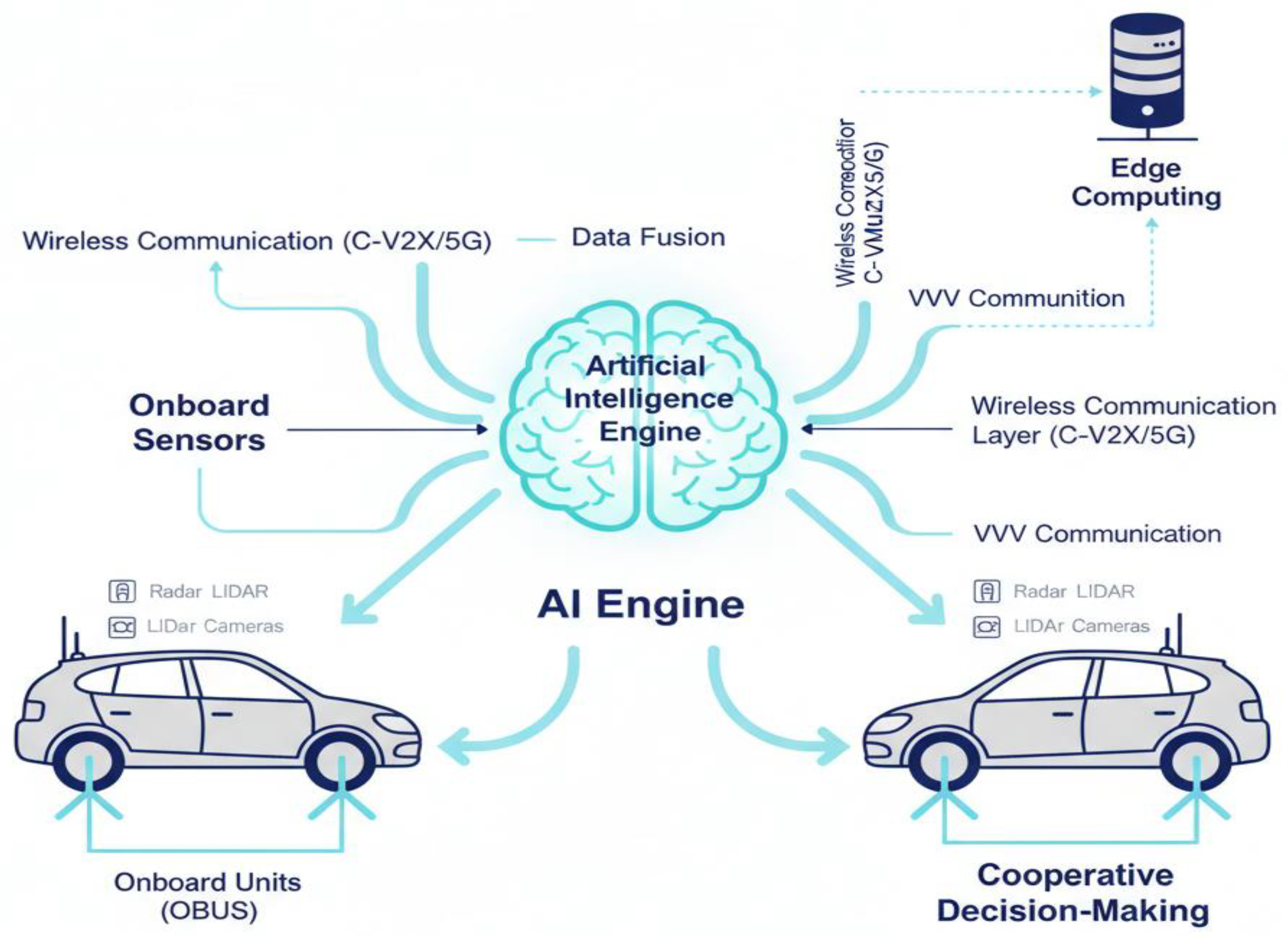
Vehicle-to-Vehicle (V2V) networks powered by artificial intelligence (AI) are built with a system architecture that combines wireless communication, sensing, and computation into a single intelligent framework that improves cooperative driving, traffic efficiency, and vehicle safety. With the help of this architecture, automobiles can operate as intelligent nodes in extremely dynamic transportation contexts, exchanging data in real time and making predictions.[4]
Fundamentally, accurate environmental awareness is provided by onboard sensors including radar, Light Detection and Ranging (LiDAR), cameras, and Global Positioning System (GPS) modules. High-resolution information about the vehicle's speed, acceleration, lane position, trajectory, and surrounding obstacles is continuously gathered by these sensors. Accurate sensory data is essential for situational awareness and serves as the foundation for sophisticated safety applications. [10]
Onboard Units (OBUs), which serve as specialised communication interfaces for sending and receiving safety-critical information, are used to transfer the gathered data. OBUs allow for quick information sharing between nearby cars, allowing data like speed, direction of travel, and brake status to be sent with little delay. This constant communication lowers the chance of collisions and greatly increases reaction time.[11]
The artificial intelligence engine, which processes multi-source vehicle data using machine learning and deep learning algorithms to forecast driving behavior and calculate the likelihood of collisions, is a crucial part of the system. The AI engine converts conventional reactive warning systems into proactive safety devices that can recognize possible risks before they arise by utilizing predictive analytics. Supporting semi-autonomous and fully autonomous driving systems requires this kind of forecasting capacity.[12]
The architecture uses edge computing infrastructure to satisfy the strict latency requirements of safety-critical applications. By executing localized data processing nearer to the vehicle, edge nodes minimize end-to-end communication latency and lessen reliance on centralized cloud servers. In situations with high traffic, this distributed computing paradigm guarantees dependable operation, increases system responsiveness, and improves scalability. The entire architecture is supported by the wireless communication layer, which offers reliable connectivity via cutting-edge technologies including fifth-generation (5G) networks and cellular vehicle-to-everything (C-V2X). Stable communication in high-mobility vehicle situations depends on these technologies' ability to enable ultra-reliable low-latency communication, high data speeds, and effective spectrum utilization.[13]
In conclusion, traditional cars become cooperative intelligent agents with the ability to interact autonomously and make decisions collectively thanks to the layered architecture of AI-driven V2V networks. This architecture creates a solid basis for intelligent transportation systems that are safer, smarter, and more effective by fusing cutting-edge sensing technologies, cognitive analytics, edge computing, and next-generation wireless connectivity.
Figure 1.
Architecture of a Vehicle-to-Vehicle (V2V) Network Driven by Artificial Intelligence.
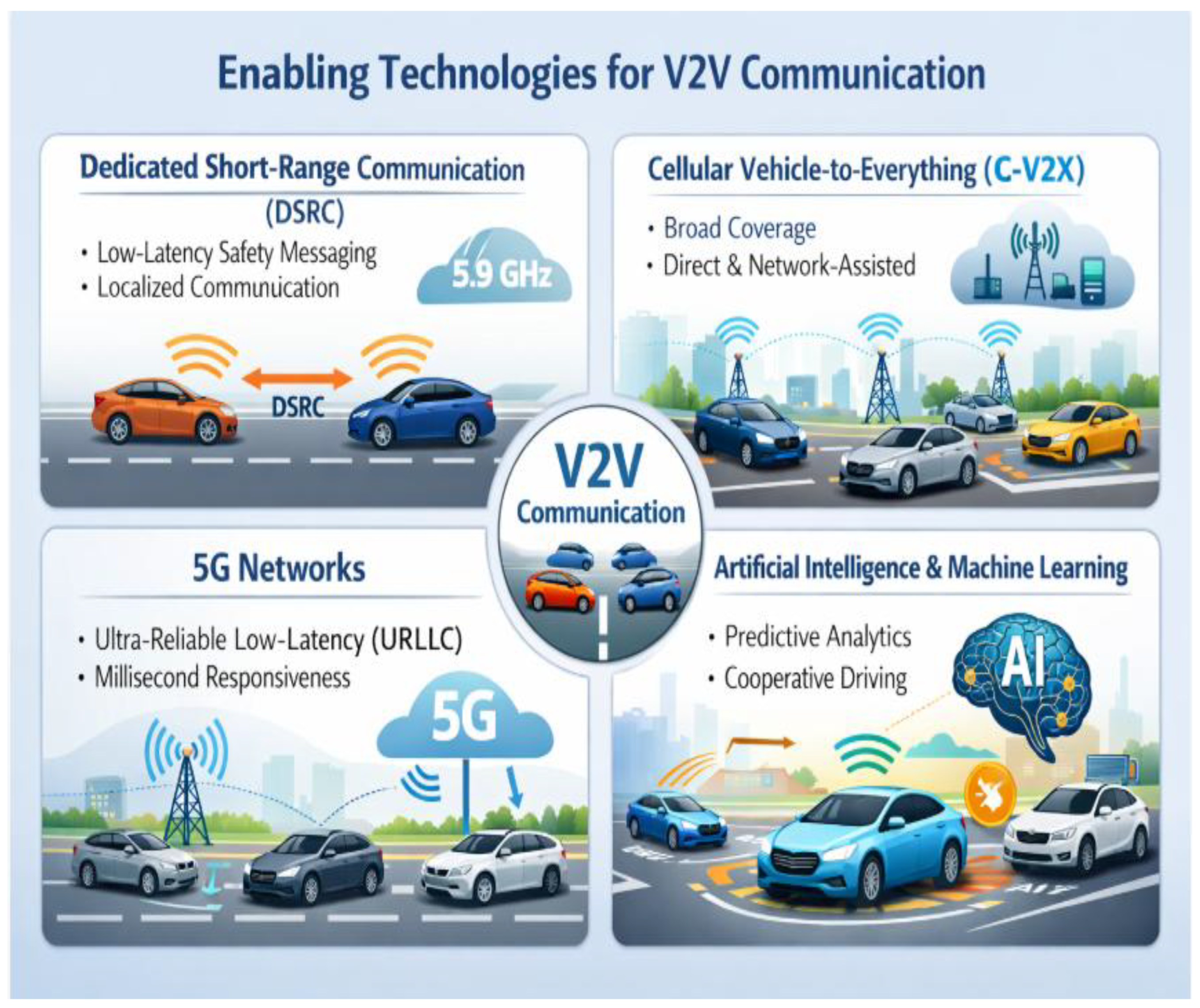
3. Enabling Technologies
3.1. Dedicated Short-Range Communication (DSRC)
Localized vehicular contexts can benefit from low-latency communication thanks to DSRC. Its performance in high-density environments is limited by scaling limits, notwithstanding its effectiveness for safety messaging.[14]
3.2. Cellular Vehicle-to-Everything (C-V2X)
C-V2X makes use of cellular infrastructure to offer increased spectral efficiency, increased coverage, and higher reliability. Both network-assisted and direct communication modalities are supported.[15]
3.3. Fifth-Generation (5G) Networks
Ultra-Reliable Low-Latency Communication (URLLC), which 5G brings, allows for millisecond-level responsiveness that is crucial for applications including autonomous driving.
3.4. Artificial Intelligence and Machine Learning
Intelligent traffic management, cooperative vision, adaptive cruise control, and trajectory prediction are all made possible by AI systems. [16]
Figure 2.
Enabling Technologies for Vehicle-to-Vehicle (V2V) Communication.
4. Current Research Trends
To create safer and more autonomous transportation systems, V2V communication research has accelerated.
4.1. AI-Based Predictive Safety
In order to analyze driving behaviors and predict collisions several seconds before they happen, deep learning models are being developed.
4.2. Edge Intelligence
Edge computing powered by AI reduces processing latency and enhances real-time responsiveness.[17]
4.3. Millimetre-Wave Communication
Cooperative cars can share sensor data thanks to the significant bandwidth provided by high-frequency bands.
4.4. Federated Learning
This method protects privacy by enabling cars to jointly train AI models without disclosing private information.
4.5. Block chain for Vehicular Security
Frameworks for decentralized authentication are being investigated to lessen cyber threats in ecosystems of connected vehicles.
The problem of combining intelligence with extremely dependable communication is still a major area of academic interest despite these developments.[18]
5. Performance Considerations
A number of crucial parameters must be analyzed in order to evaluate V2V networks:
- Latency: establishes how responsive safety measures are.
- Reliability: ensures that packets are delivered successfully in dynamic situations.
- Throughput: allows for the transfer of large amounts of sensor data.
- Prediction Accuracy: demonstrates how successful AI models are.
- Energy Efficiency: crucial to long-term vehicle networks.
6. Challenges and Limitations
Before broad adoption is possible, a number of obstacles need to be removed: Cyber security vulnerabilities and data privacy concerns
- The compatibility of conflicting communication protocols
- Exorbitant infrastructure deployment expenses
- Problems with spectrum allocation
- Unpredictable traffic situations with algorithmic uncertainty
Coordination between academic institutions, business, and government agencies will be necessary to overcome these obstacles.
7. Future Directions of V2V Communication
The future of vehicular communication is closely aligned with next-generation wireless innovations.
7.1. Sixth-Generation (6G) Networks
6G is expected to deliver microsecond latency, terahertz communication, and AI-native architectures capable of supporting fully autonomous mobility.
7.2. Cooperative Autonomous Driving
Vehicles will coordinate maneuvers such as platooning, merging, and intersection crossing with minimal human intervention.
7.3. Smart City Integration
To provide comprehensive traffic management, V2V will function in tandem with Vehicle-to-Infrastructure and Vehicle-to-Everything frameworks.
7.4. Digital Twin Transportation Systems
Proactive risk mitigation and predictive modelling will be made possible by virtual copies of traffic settings.
7.5. Green Communication Technologies
Energy-efficient procedures will be the focus of future research to lessen the impact on the environment.
These developments indicate that V2V communication will evolve from a safety enhancement tool into the backbone of intelligent mobility ecosystems.
8. Conclusions
Modern transportation has undergone a paradigm shift thanks to vehicle-to-vehicle communication, which allows for intelligent and immediate data sharing between cars. Artificial intelligence turns conventional reactive safety systems into predictive ones that can stop mishaps before they happen.
V2V communication is positioned to become a key component of autonomous vehicles as wireless technologies advance toward 6G and AI-native networks. Unlocking its full potential and realizing the long-term goal of accident-free roads will require ongoing research centered on security, scalability, and dependability.
References
- Kenney, J. B. Dedicated Short-Range Communications (DSRC) Standards in the United States. Proceedings of the IEEE 2011, 99(7), 1162–1182. [Google Scholar] [CrossRef]
- Hartenstein, H.; Laberteaux, K. A Tutorial Survey on Vehicular Ad Hoc Networks. IEEE Communications Magazine 2008, 46(6), 164–171. [Google Scholar] [CrossRef]
- Campolo, C.; Molinaro, A.; Scopigno, R. Vehicular Ad Hoc Networks: Standards, Solutions, and Research; Springer, 2017. [Google Scholar]
- Molina-Masegosa, R.; Gozalvez, J. LTE-V for Sidelink 5G V2X Communications. IEEE Vehicular Technology Magazine 2017, 12(4), 30–39. [Google Scholar] [CrossRef]
- Chen, S.; Hu, J.; Shi, Y.; Zhao, L. LTE-V: A TD-LTE-Based V2X Solution for Future Vehicular Networks. IEEE Internet of Things Journal 2016, 3(6), 997–1005. [Google Scholar] [CrossRef]
- Taleb, T.; et al. Multi-Access Edge Computing: Survey and Research Outlook. IEEE Communications Surveys & Tutorials 2017, 19(3), 1657–1681. [Google Scholar]
- Abbas, T.; et al. Mobile Edge Computing for Vehicular Networks: A Comprehensive Survey. IEEE Communications Surveys & Tutorials 2019, 21(3), 2782–2808. [Google Scholar]
- Shladover, S. E. Connected and Automated Vehicle Systems: Introduction and Overview. Journal of Intelligent Transportation Systems 2018, 22(3), 190–200. [Google Scholar] [CrossRef]
- Zhang, J.; et al. Machine Learning in Intelligent Vehicular Networks: A Survey. IEEE Communications Surveys & Tutorials 2020, 22(4), 2280–2308. [Google Scholar]
- 3GPP TR 38.885 (2020). Study on NR Vehicle-to-Everything (V2X) Services (Release 16). 3rd Generation Partnership Project.
- Naik, G.; Choudhury, B.; Park, J. M. IEEE 802.11bd & 5G NR V2X: Evolution of Radio Access Technologies for V2X Communications. IEEE Access 2019, 7, 70169–70184. [Google Scholar]
- Gesbert, D.; et al. From Single User to Multiuser Communications: Shifting the MIMO Paradigm. IEEE Signal Processing Magazine 2020, 24(5), 36–46. [Google Scholar] [CrossRef]
- Alalewi, A.; Cheng, N.; Shen, X. mmWave-Based V2X Communications for Autonomous Driving: A Survey. IEEE Wireless Communications 2020, 27(2), 88–95. [Google Scholar]
- Liu, J.; Wan, J.; Zeng, B.; Wang, Q.; Song, H.; Qiu, M. A Scalable and Quick-Response Software Defined Vehicular Network Assisted by Mobile Edge Computing. IEEE Communications Magazine 2019, 55(7), 94–100. [Google Scholar] [CrossRef]
- Araniti, G.; Condoluci, M.; Scopigno, R.; Molinaro, A.; Iera, A. LTE for Vehicular Networking: A Survey. IEEE Communications Magazine 2013, 51(5), 148–157. [Google Scholar] [CrossRef]
- Jiang, D., & Delgrossi, L. (2008). IEEE 802.11p: Towards an International Standard for Wireless Access in Vehicular Environments. IEEE Vehicular Technology Conference.
- Bazzi, A.; Masini, B. M.; Zanella, A.; Thibault, I. On the Performance of IEEE 802.11p and LTE-V2V for the Cooperative Awareness of Connected Vehicles. IEEE Transactions on Vehicular Technology 2017, 66(11), 10419–10432. [Google Scholar] [CrossRef]
- Kuutti, S.; et al. A Survey of Deep Learning Applications to Autonomous Vehicle Control. IEEE Transactions on Intelligent Transportation Systems 2020, 22(2), 712–733. [Google Scholar] [CrossRef]
- Bansal, G.; Lu, H.; Kenney, J. B.; Poellabauer, C. LIMERIC: A Linear Adaptive Message Rate Algorithm for DSRC Congestion Control. IEEE Transactions on Vehicular Technology 2013, 62(9), 4182–4197. [Google Scholar] [CrossRef]
- Abboud, K.; Omar, H. A.; Zhuang, W. Interworking of DSRC and Cellular Network Technologies for V2X Communications: A Survey. IEEE Transactions on Vehicular Technology 2016, 65(12), 9457–9470. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



