
Submitted:
11 February 2026
Posted:
12 February 2026
You are already at the latest version
Abstract
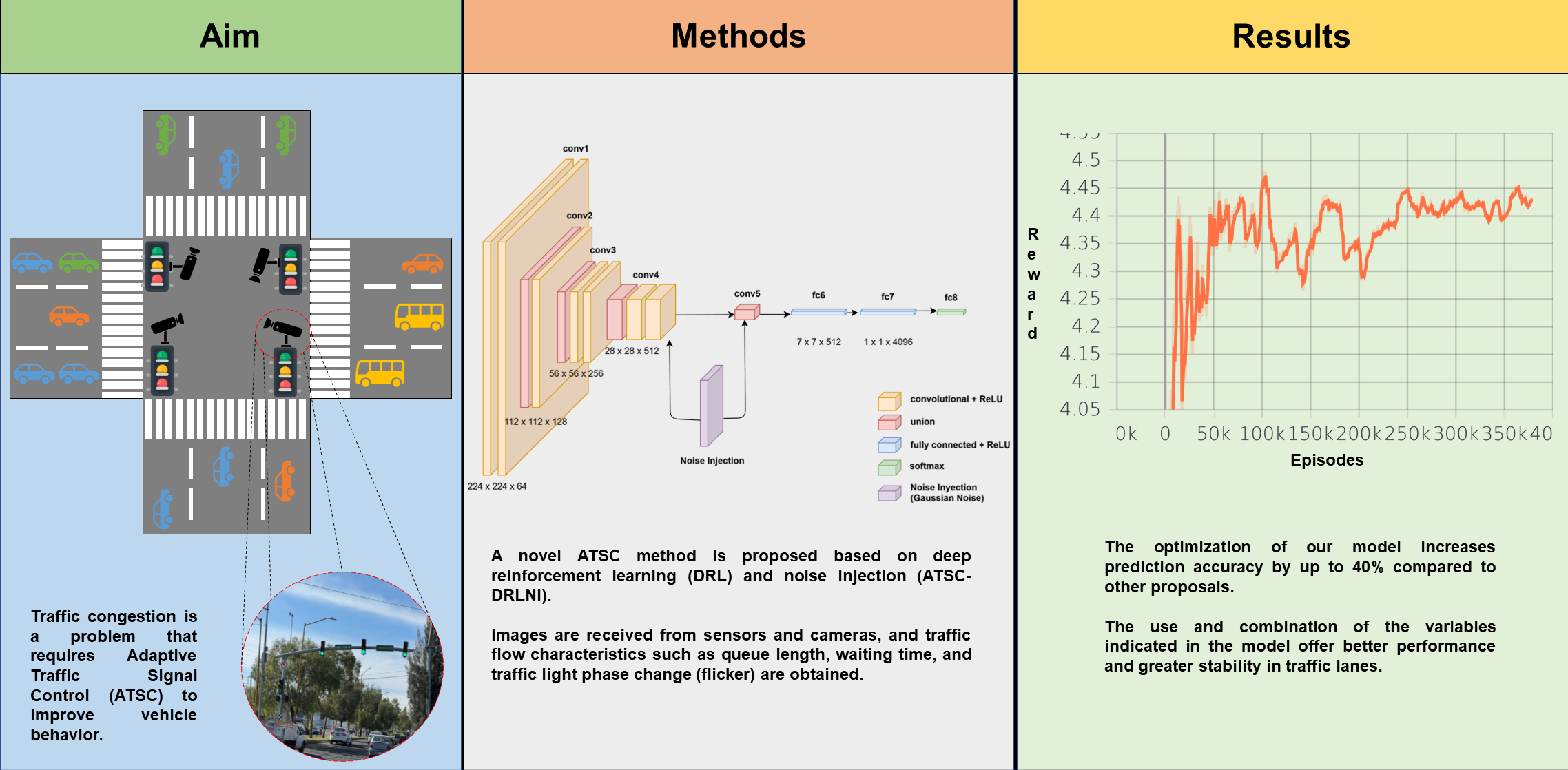
Adaptive Traffic Signal Control (ATSC) remains a critical challenge for urban mobility. In this direction, Deep Reinforcement Learning (DRL) has been widely investigated for ATSC, showing promising improvements in simulated environments. However, a noticeable gap remains between simulation-based results and practical implementations, due to reward formulations that do not address phase instability. Stochastic variations may trigger premature phase changes ("flickers”), affecting signal behavior and potentially limiting deployment in real scenarios. Although several works have examined delay, queues, and decentralized coordination, stability-focused variables remain comparatively less explored, particularly in single yet complex intersections. This study proposes a decentralized DRL model for ATSC with Noise Injection (ATSC-DRLNI) applied to a single intersection, introducing a stability-oriented reward function that integrates flickers, queue length, and Advantage Actor-Critic (A2C) learning feedback. The model is evaluated in Simulation of Urban MObility (SUMO) platform and compared against seven baseline methods, using real traffic data from a Mexican city for calibration and validation. Results suggest that penalizing flickers may contribute to more stable phase transitions, while reductions of up to 40\% in queue length were observed in heavy-traffic scenarios. These findings indicate that incorporating stability-related variables into reward functions may help bridge the gap between DRL-based ATSC studies.
Keywords:
traffic congestion
; adaptive traffic signal control (ATSC)
; deep reinforcement learning (DRL)
; convolutional neural networks (CNNs)
; noise injection (NI)
; advantage actor-critic (A2C)
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



