
Submitted:
10 February 2026
Posted:
12 February 2026
You are already at the latest version
Abstract
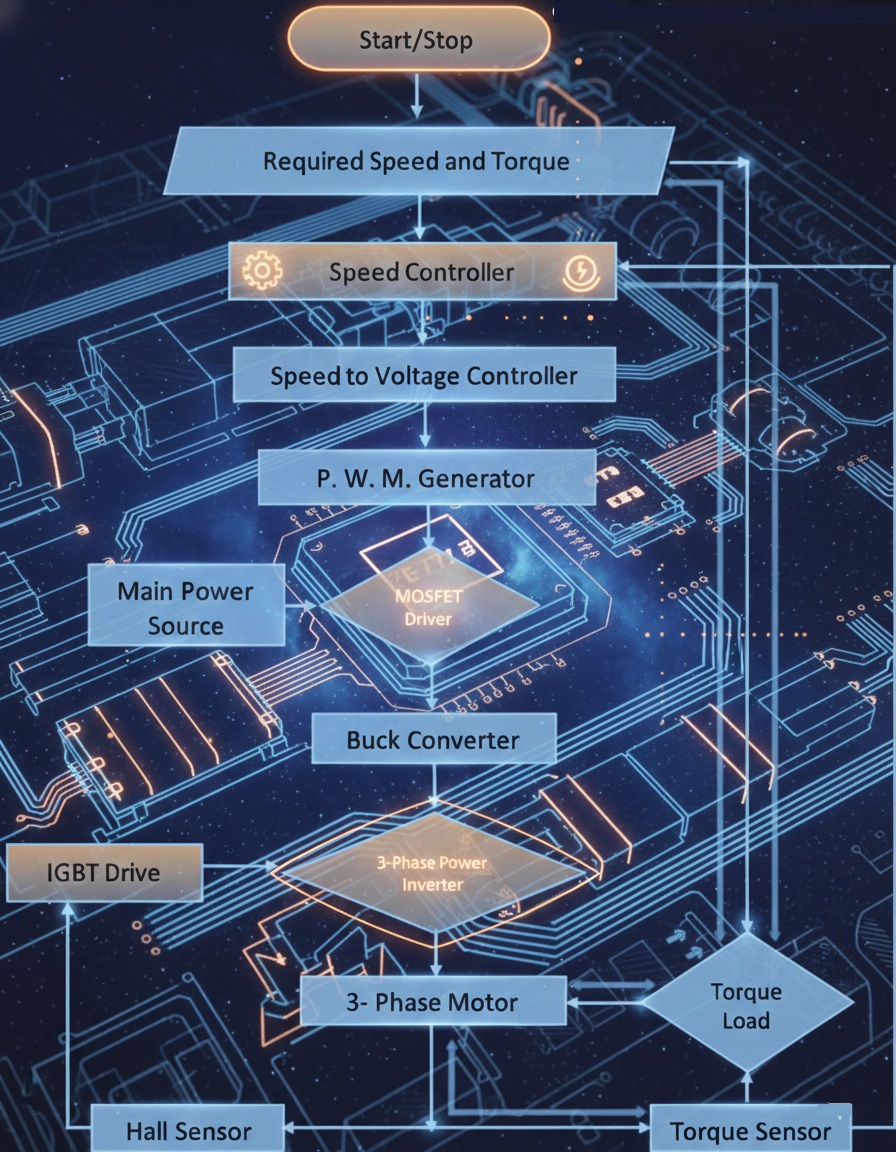
Years of empirical research and technical effort have brought the world into an era defined by modern engineering amenities. The Brushless Direct Current or BLDC motor for electric propulsion systems stands as a significant innovation within this modern period. These motor drives are currently utilized across various sectors including automation systems and electric vehicles along with robotics and industrial applications. While popular control methods like fuzzy logic or PWM offer distinctive functionalities they often struggle with the nonlinear behavior and load variations inherent in BLDC motors. High speed configurations and parametric varieties further complicate stability. To enhance performance a rugged and quickly adaptable controller is required to minimize ripples and improve response times. This study proposes an adaptive PID controller that combines the strengths of a PID autotuner with a standard PID framework. The autotuner provides self adjusting parameters to handle nonlinearities and speed variations through a frequency response estimation process while the fast responsive PID controller compensates for the slow performance of the autotuning phase. These elements work in tandem to automatically readjust parameters for superior accuracy. Using the MATLAB simulation platform a benchmark motor system was developed to verify these results. The proposed design was compared against traditional PID and FPA speed controllers. Results demonstrate that the adaptive PID controller achieves less ripple and an overshoot of less than one percent while maintaining excellent load performance. This research contributes a reliable and highly adaptable control solution for modern BLDC motor systems. Benchmark results in MATLAB Simulink confirm that the proposed controller maintains an overshoot threshold of less than 1% and consistently yields lower torque ripple than existing PID and FPA models.
Keywords:
PID controller
; electric vehicles
; adaptive PID
; BLDC
; PMW
; fuzzy logic
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



