
Submitted:
03 February 2026
Posted:
04 February 2026
You are already at the latest version
Abstract
We develop a topological classification of admissible reconstruction operations in generative systems where extended structure is built through repeated local extension subject to compatibility constraints. Reconstruction is formalized as a feasibility--governed process rather than a dynamical or metric one, with admissibility determined by the accumulation of obstruction under composition. Using loop diagnostics, we identify global incompatibilities that are invisible to local extension rules but become unavoidable under closed composition. Under mild and realization--independent assumptions, including indefinite continuation and finite interface capacity, we show that persistent nontrivial obstruction is possible only when it is supported on codimension--2 subsets of the reconstructed domain. This result induces a small number of topological universality classes distinguished by the existence and stability of loop--detectable obstruction. The framework is model--agnostic and applies equally to discrete, combinatorial, and continuum reconstructions, providing a topological explanation for the ubiquity of codimension—2 defects in generative systems.
Keywords:
topological reconstruction
; admissibility
; obstruction theory
; loop holonomy
; path groupoids
; defect codimension
; universality classes
; linking invariants
; feasibility-governed extension
; coarse-graining stability
1. Introduction
A wide class of mathematical constructions may be described as generative or reconstruction procedures: extended structure is produced by iterating local extension moves subject to compatibility constraints. Canonical examples include CW–complex attachment and handle decompositions [10,16], rewriting systems on combinatorial complexes [8], and gluing or descent constructions in sheaf theory [3,6]. In such settings, local admissibility does not guarantee global coherence. Extension rules may be satisfiable on bounded regions while becoming incompatible when iterated, composed, or transported around nontrivial loops.
This observation naturally separates two aspects of any reconstruction scheme: (i) the specification of local extension moves, and (ii) the global feasibility of indefinite continuation under composition and gluing. The present work is concerned with the second aspect.
Central question. We isolate and study the following structural problem:
Here admissibility is not defined in terms of optimization, probability, or dynamics. Instead, it is understood as a topological notion: an extension scheme is admissible to the extent that local compatibility can be composed and iterated arbitrarily many times without forcing unavoidable global obstruction, in the sense of classical obstruction theory [14,15].Which kinds of reconstruction operations remain topologically admissible under indefinite compositional extension?
Admissibility as topology rather than dynamics. A guiding principle of this work is that many failures of indefinite continuation are best understood not as dynamical instabilities, but as manifestations of topological obstruction. Local extension may introduce mismatch that is repairable on contractible neighborhoods, yet becomes unavoidable when constraints are composed around closed loops. In such cases, the appropriate language is homotopical: obstruction appears as nontrivial loop holonomy, cocycle failure, or defect classes supported on subsets of definite codimension [2,5]. Conversely, when mismatch can be confined, canceled, or displaced into lower–dimensional support, reconstruction may remain feasible at arbitrarily large scales.
To formalize this viewpoint, we adopt a realization–independent framework. We do not assume a background manifold, metric, probabilistic structure, or equations of motion. Instead, reconstruction is modeled abstractly by a directed extension relation on a configuration space together with compositional data sufficient to define loop diagnostics. The central objects of study are obstruction classes arising under composition and the topological dimension of their support.
Main mathematical contribution. The contribution of this work is not the introduction of new linking invariants, homotopy groups, or obstruction classes. Rather, it is the formulation and resolution of a new classification problem in topological obstruction theory:
Which topological types of obstruction can persist under indefinite compositional extension when incompatibility may be locally repaired, but only with bounded resources?
Classical obstruction theory typically treats extension as a binary question: a structure either extends across a domain, or it fails to do so, with obstruction acting as a terminal veto [14,15]. Such formulations do not distinguish between obstructions that can be locally absorbed, confined, or displaced under iteration, and those that inevitably proliferate and destroy global feasibility. As a result, they do not address persistence under repeated extension or the role of bounded repair capacity.
The framework developed here makes this distinction explicit by incorporating repair as a first-class topological notion. Obstruction is allowed to accumulate under composition, but admissibility is governed by whether this accumulation can be confined using subextensive interface resources. This shift from binary extension to feasibility–governed reconstruction leads to a genuinely new classification problem, even though the underlying topological invariants are classical.
Under mild assumptions capturing (a) locality of extension and (b) finite interface (repair) capacity, we prove that admissible reconstruction operations fall into a small number of topological universality classes. These classes are characterized by:
- the codimension of defect support on which nontrivial obstruction localizes,
- the existence or absence of loop–detectable obstruction invariants,
- the stability of obstruction under admissible coarse–graining.
Our central theorem shows that codimension–2 defect support is uniquely selected by these requirements: it is the minimal codimension at which nontrivial loop invariants exist and remain compatible with persistent reconstruction under finite repair capacity. While the existence of codimension–2 defects is classical, the necessity of codimension–2 support as a condition for persistence under indefinite, repair–permitting extension is, to our knowledge, new. The result may therefore be viewed as a selection theorem imposed by feasibility rather than dynamics, refining classical results on linking and complements [1,11].
Scope and independence from specific models. The aim of this work is classification rather than analysis of a particular reconstruction mechanism. Accordingly, the framework is deliberately abstract. Concrete constructions—combinatorial, geometric, or otherwise—may be viewed as realizations of the axioms introduced here, but the results depend only on the topological behavior of obstruction under admissible composition. This separation clarifies which features are universal and which arise from additional, model–specific structure.
Relation to classical topology. Although the framework is formulated abstractly in terms of admissible reconstruction and feasibility, its core constructions admit a direct interpretation in standard topological language. In Appendix A, reconstruction paths are organized into a path groupoid [4], and the obstruction functional is shown to define a categorical 1–cocycle whose holonomy around closed loops recovers the loop obstruction used throughout the paper. Persistent defects are identified with the support of nontrivial holonomy, yielding a representation of into the obstruction monoid. This places the codimension–2 admissibility theorem in direct correspondence with classical linking and obstruction theory, while extending these results to a setting governed by feasibility, iteration, and persistence rather than single–stage extension.
Organization. Section 2 formalizes reconstruction as a feasibility–governed directed extension process and introduces reconstruction paths, compositional accumulation of obstruction, and loop closure. Section 3 develops loop diagnostics and defect support, culminating in a codimension–based admissibility theorem that classifies persistent obstruction. Section 4 formulates universality classes of reconstruction operations and analyzes their stability under admissible coarse–graining. Section 5 presents fully worked examples in low–dimensional settings, explicitly demonstrating how codimension controls loop–detectable obstruction, repair cost, and persistence. Section 6 relates the abstract classification to discrete, geometric, and physical reconstruction models. Finally, Section 7 discusses implications, limitations, and directions for future work. A categorical and topological reformulation in terms of path groupoids and obstruction cocycles is provided in Appendix A.
Notation. Throughout, denotes the configuration space, ≺ the directed extension relation, and the loop obstruction associated with a closed reconstruction loop . All topological statements concern obstruction classes and their supports and do not presuppose smoothness unless explicitly stated.
2. Reconstruction as a Feasibility–Governed Process
We formalize reconstruction as a directed process of structural extension governed by feasibility rather than time evolution, optimization, or energy minimization. The central object is not a dynamical trajectory but an indefinitely extensible pattern whose continued growth depends on the controlled accumulation of incompatibility. Related viewpoints appear implicitly in classical obstruction theory and in categorical approaches to composition and gluing [4,14,15]. The novelty of the present formulation lies in treating obstruction not as a binary veto on extension, but as a compositional quantity whose long–range behavior determines admissibility under indefinite iteration.
2.1. Configuration Space and Directed Extension
Definition 2.1
(Configuration space). Let be a set whose elements represent partial, local, or intermediate configurations of a generative construction. No metric, topology, probability measure, or dynamical law is assumed on a priori.
Elements of are not interpreted as states evolving in time. Instead, they represent partially realized structures that may or may not admit further extension, as in inductive constructions on complexes or sheaf–theoretic gluing [3,16].
Definition 2.2
(Admissible extension). An admissible extension relation is a directed relation
where is read as “ is a feasible extension of .”
The direction of ≺ encodes structural accretion rather than temporal succession. Extensions may branch, terminate, or become mutually incompatible; determinism and global transitivity are not assumed, as is typical in rewriting systems and combinatorial group theory [8].
We impose the following minimal structural assumptions:
- 1.
- Irreflexivity: .
- 2.
- Locality: whether holds depends only on data localized to the extension interface between and .
- 3.
- Conditional composability: if and , then the composite extension is defined whenever interface data are compatible; failure of compatibility is recorded as obstruction rather than as undefined composition.
These assumptions are intentionally weak and are satisfied by a broad class of generative and gluing constructions.
2.2. Reconstruction Paths and Composition
Definition 2.3
(Reconstruction path). A reconstruction path is a finite or infinite directed sequence
of admissible extensions.
A reconstruction path represents a particular mode of structural growth. It is not a time–ordered trajectory and carries no intrinsic parametrization or rate.
Distinct reconstruction paths may be locally compatible yet globally incompatible. Conversely, different paths may become equivalent under admissible coarse–graining. This multiplicity mirrors familiar phenomena in homotopy and higher–category theory, where distinct morphism compositions may represent the same global class [9].
2.3. Obstruction as a Compositional Quantity
Admissibility is not treated as a binary predicate that absolutely accepts or rejects extensions. Instead, it is governed by how obstruction accumulates under composition, in the spirit of classical cocycle conditions [14,15].
Definition 2.4
(Local obstruction). Let be an abelian monoid with identity element 0. A local obstruction assigns to each admissible extension
an element
where denotes perfect local compatibility, and records the incompatibility introduced at the extension interface.
The structure of is not fixed; it may encode cocycle defects, holonomy, mismatch charges, or other realizations of incompatibility familiar from bundle theory and groupoid–valued cocycles [2,4]. Only its algebraic and compositional properties are assumed.
Definition 2.5
(Pathwise accumulation). Given a finite reconstruction path
the accumulated obstruction along is defined as
Associativity of ⊕ guarantees that depends only on the ordered composition of extensions, not on how they are bracketed.
Remark.
An extension introducing nonzero local obstruction is not excluded. However, obstruction may accumulate under repeated composition in a way that limits the possibility of indefinite extension. The admissibility of a reconstruction process is therefore determined by the asymptotic behavior of under iteration.
2.4. Loop Closure and Obstruction Holonomy
Nontrivial topology enters when reconstruction paths close only after identification of interface data.
Definition 2.6
(Closed reconstruction loop). A closed reconstruction loop is a finite reconstruction path
together with an admissible identification of the terminal interface of with the initial interface of .
The identification is not an extension in ; it represents a compatibility constraint imposed at the level of interfaces. Accordingly, closure does not trivialize accumulated obstruction, exactly as in holonomy phenomena for flat connections [2].
Definition 2.7
(Loop obstruction). The loop obstruction associated with a closed reconstruction loop is
Remark.
indicates that all local mismatches introduced along the loop can be absorbed or neutralized under closure. A nonzero signals a global incompatibility that cannot be removed by admissible local repair.
Loop obstruction is invariant under reparametrization of the loop and under insertion or removal of subpaths whose total accumulated obstruction vanishes. It therefore defines a homotopy–level invariant of admissible reconstruction loops.
2.5. Feasibility, Boundedness, and Persistence
To distinguish admissible from non–admissible reconstruction processes, we introduce a quantitative notion of bounded obstruction growth.
Definition 2.8
(Bounded obstruction growth). Let denote a family of reconstruction loops whose geometric size (e.g. diameter or coarse–grained radius) is bounded by R. A reconstruction process is said to have bounded obstruction growth if there exists a function with subextensive growth,
such that for all admissible loops ,
where denotes any fixed, admissible norm or order on .
Definition 2.9
(Persistent reconstruction). A reconstruction path is called persistent if it belongs to a reconstruction process with bounded obstruction growth and if any nonzero obstruction can be confined, under admissible coarse–graining, to a subset of strictly lower topological dimension than the ambient reconstructed domain.
Persistence is a global property. Locally admissible extensions that lead to superextensive obstruction growth are not forbidden at finite stages, but they are eliminated under indefinite continuation or coarse–graining.
Remark.
Feasibility thus replaces optimization as the organizing principle of reconstruction. Globally coherent structures emerge through a selection mechanism that suppresses extension patterns whose obstruction growth is incompatible with bounded repair capacity. This perspective generalizes classical obstruction theory from single–stage extension problems to asymptotic admissibility under indefinite iteration.
Figure 1 schematically illustrates loop-based diagnostics for defect support.
In the following sections, we show that the topology of loop obstruction—specifically its detectability by linking and the codimension of its support—completely determines which reconstruction processes satisfy these feasibility and persistence conditions.
3. Codimension and Defect Support
We now classify admissible reconstruction operations according to the codimension of the defect support on which nontrivial obstruction is localized. The classification concerns not reconstructed structure itself, but persistent obstruction classes: global incompatibilities that survive admissible local repair, coarse–graining, and indefinite compositional extension.
The central claim of this section is that feasibility under indefinite reconstruction is governed not by microscopic extension rules, but by the topological dimension of the subset on which obstruction is supported.
3.1. Defects and Their Support
Reconstruction operations may introduce localized regions where admissibility constraints fail to close exactly. When such mismatch cannot be eliminated by admissible local rearrangement, it defines a defect of the reconstruction process.
Definition 3.1
(Defect support). Let denote a coarse–grained topological space representing the reconstructed domain. A defect is a nontrivial loop obstruction class whose support is localized, up to admissible deformation, on a closed subset with the property that any reconstruction loop ℓ contained in has vanishing obstruction.
Definition 3.2
(Codimension of defect support). A defect support is said to have codimension k if k is the minimal integer such that, for every point , there exists a neighborhood U of x homeomorphic to in which is contained in a subset homeomorphic to .
Codimension is defined relative to the reconstructed domain and is invariant under admissible coarse–graining and changes in microscopic realization.
Remark (Coherent bulk is not a defect).
Codimension–0 reconstructed regions are admissible provided their loop obstruction class is trivial. Codimension–0 defects arise only when nontrivial obstruction permeates a region of nonzero interior. The classification below concerns defect support for nontrivial obstruction classes.
3.2. Loop Detection and Topological Charge
Loop diagnostics detect obstruction through encirclement rather than by sampling local mismatch density.
Let ℓ be an admissible reconstruction loop in . If ℓ is homotopically nontrivial in , the associated loop obstruction measures the topological charge carried by the defect support D.
Definition 3.3
(Topological loop invariant). A defect support D defines a topological loop invariant if the loop obstruction map
is well defined and nontrivial.
In this case, depends only on the homotopy class of ℓ in and is independent of the geometric realization of the loop.
Remark.
Topological loop obstruction is intrinsically scale–independent. Any scale dependence enters not through itself, but through the cost required to confine or repair the defect under extension.
3.3. Repair Cost and Finite Interface Capacity
While loop obstruction is topological, the cost of accommodating obstruction under continued reconstruction depends on the geometry of the defect support.
Definition 3.4
(Repair cost). Let denote the minimal admissible repair cost required to maintain compatibility in the presence of loop obstruction for a reconstruction loop ℓ. The repair cost is assumed to scale monotonically with the minimal measure of interface required to localize the defect support enclosed by ℓ.
Definition 3.5
(Finite interface capacity). A reconstruction process is said to have finite interface capacity if there exists a dimension such that, for any family of loops of characteristic size R,
Finite interface capacity formalizes the requirement that admissible repair resources grow at most subextensively with system size.
Remark.
This assumption excludes reconstruction processes that require volumetric repair to maintain compatibility, while permitting localization of obstruction on lower–dimensional subsets.
3.4. Classification by Codimension
We now analyze which codimensions of defect support are compatible with nontrivial loop obstruction and finite interface capacity.
Codimension–0 (bulk obstruction).
If D has codimension 0, then D contains an open subset of . Any sufficiently large loop ℓ necessarily encloses a region of positive volume, and repair requires modification throughout this region. Consequently, grows proportionally to , violating finite interface capacity. Moreover, is trivial for sufficiently large D, so no stable loop invariant exists.
Codimension–1 (wall–like defects).
If D has codimension 1, then D separates locally. Loops intersect D along extended regions rather than through discrete linking. As a result, loop obstruction is not invariant under admissible homotopy and does not define a homomorphism from . Furthermore, repair requires modification along hypersurfaces whose measure grows as , violating finite interface capacity.
Codimension–2 (filament– or vortex–like defects).
If D has codimension 2, then admits nontrivial fundamental group, and loops detect obstruction purely through linking. In this case, H defines a homomorphism
that is invariant under admissible homotopy. Repair requires modification only in neighborhoods of D, whose measure scales as and is therefore compatible with finite interface capacity.
Remark.
This classification parallels familiar distinctions between bulk frustration, domain walls, and vortices, but is derived here purely from topological and feasibility considerations, without reference to metric, field, or dynamical structure.
3.5. Codimension Admissibility Theorem
Theorem 3.6
(Codimension admissibility of persistent defects). Let be a connected d–dimensional topological manifold (or manifold–like CW complex) admitting arbitrarily large embedded loops. Assume indefinite reconstruction with finite interface capacity. Let be a closed defect support associated with a nontrivial obstruction class such that the loop obstruction map
is well defined and invariant under admissible homotopy. Then D must have codimension exactly 2.
Proof.
Let k denote the codimension of D.
Case (bulk support). If D has codimension 0, then it contains an open subset of . Any sufficiently large loop ℓ encloses a region of positive d–dimensional volume. By definition of repair cost, maintaining compatibility in the presence of obstruction requires modification throughout this enclosed region, implying
which violates finite interface capacity. Independently, for sufficiently large D, the complement is either disconnected or simply connected at large scales, so admits no nontrivial homotopy–invariant loop classes. Thus no persistent loop obstruction can exist in this case.
Case (hypersurface support). If D has codimension 1, it locally separates . Loops in cannot detect discrete linking with D; instead, any attempt to define obstruction depends on geometric intersection data rather than homotopy class. Consequently, no homotopy–invariant map can be defined. Moreover, admissible repair necessarily involves controlling mismatch along hypersurface regions whose measure scales as , again violating finite interface capacity. Hence codimension–1 defect support cannot sustain persistent loop obstruction.
Case (high–codimension support). If , then standard results on complements of high–codimension closed subsets imply that is simply connected. In particular,
so no nontrivial loop obstruction map can exist. Thus high–codimension defects are invisible to loop diagnostics, regardless of repair cost.
Case (codimension–2 support). When D has codimension 2, the complement admits nontrivial fundamental group generated by loops linking D. In this case, obstruction is detected purely through linking, and
is well defined and invariant under admissible homotopy. Furthermore, admissible repair can be confined to neighborhoods of D whose measure scales as , which is subextensive and therefore compatible with finite interface capacity.
Since all other codimensions are excluded, codimension–2 defect support is necessary for the existence of nontrivial, persistent loop obstruction under indefinite reconstruction with finite interface capacity. □
Remark.
The theorem addresses nontrivial obstruction classes detectable by loop composition. Trivially admissible bulk reconstruction without obstruction lies outside its scope.
3.6. Consequences
Persistent reconstruction defects are necessarily supported on codimension–2 subsets of the reconstructed domain. Bulk obstruction is suppressed unless trivial, and wall–like defects fail to define stable loop diagnostics. Codimension–2 support uniquely permits nontrivial, topologically protected obstruction compatible with finite interface capacity.
This result provides the topological foundation for the universality classes developed in the remainder of the paper and explains the ubiquity of filament– and vortex–like structures in admissible generative systems.
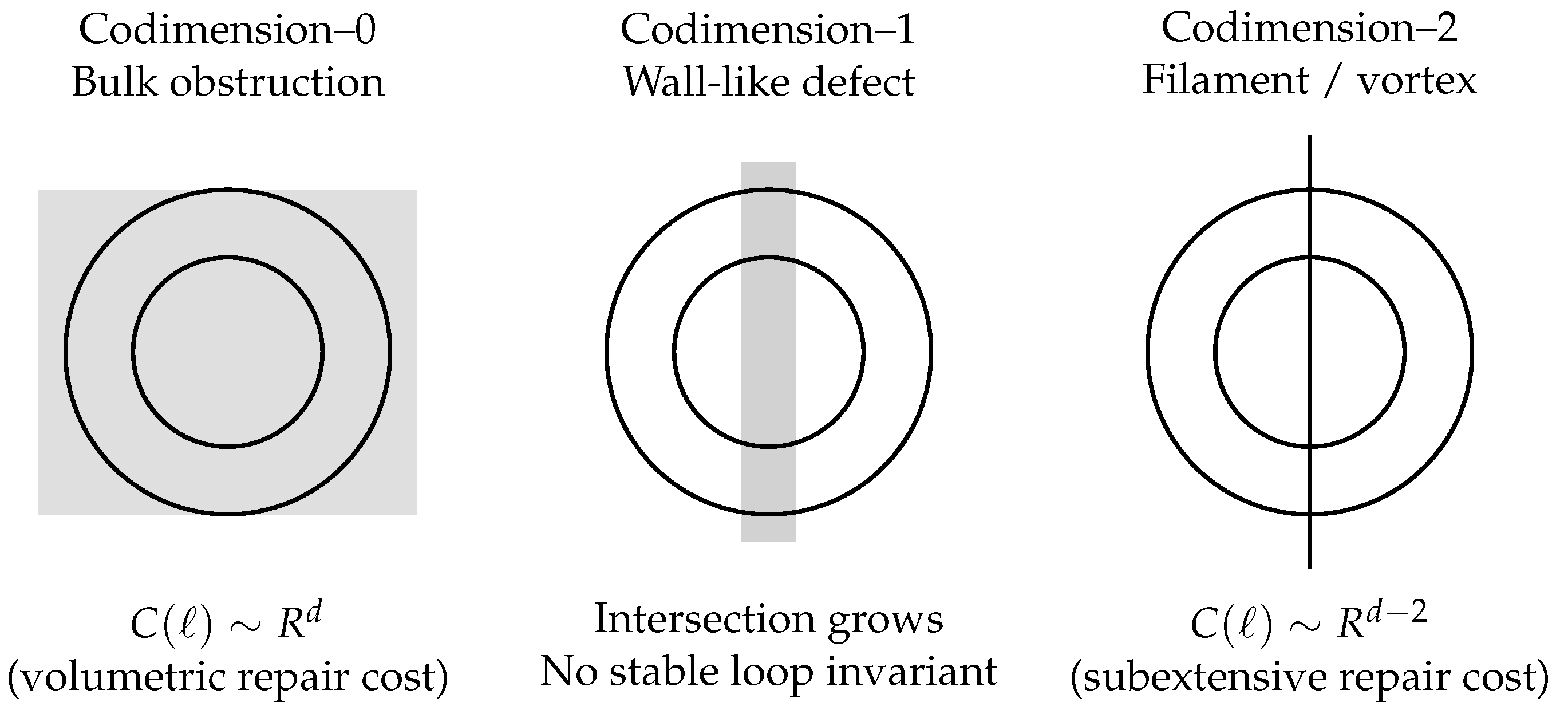
Figure 2 schematically shows how loop enlargement distinguishes defect codimension via the scaling of admissible repair cost.
4. Universality Classes of Reconstruction Operations
The codimension–based classification of defect support established in Section 3 induces a natural partition of reconstruction operations into universality classes. These classes capture the large–scale, realization–independent behavior of admissible reconstruction under indefinite extension and admissible coarse–graining.
Universality here refers not to microscopic extension rules or local update schemes, but to the persistent topological structure of obstruction that survives feasibility constraints. In particular, universality is determined by the codimension and topological detectability of defect support, rather than by the detailed implementation of reconstruction.
4.1. Definition of Universality Classes
Definition 4.1
(Universality class). Two reconstruction processes and are said to belong to the same universality class if, under admissible coarse–graining and indefinite extension, their persistent obstruction structures are supported on defect sets of the same codimension and induce isomorphic loop obstruction maps
up to admissible deformation and homotopy.
Universality is thus defined with respect to persistent obstruction data, not with respect to the full space of local reconstruction rules. Distinct microscopic mechanisms may therefore lie in the same universality class provided their long–range obstruction behavior is topologically equivalent. This mirrors classical classification results in topology, where homotopy–invariant data determines equivalence classes independently of local models [9,14].
Remark.
This notion of universality parallels that of critical phenomena, but replaces dynamical renormalization flows with feasibility–based filtering of reconstruction processes.
4.2. Loop Diagnostics and Topological Classification
Closed reconstruction loops provide a realization–independent diagnostic of persistent topological obstruction.
Corollary 4.2
(Loop–detectable universality classes). Let be a reconstruction process with persistent obstruction. Then admits a nontrivial loop obstruction invariant if and only if its defect support belongs to the codimension–2 universality class.
Proof.
This is an immediate consequence of Theorem 3.6. For codimension–2 defect support, the complement admits nontrivial fundamental group, and loop obstruction is detected by linking. For defect support of codimension different from 2, either no nontrivial loop invariant exists or obstruction fails to be invariant under admissible homotopy. □
Remark.
Loop diagnostics classify universality classes only with respect to topological obstruction. They do not distinguish reconstruction processes that share the same obstruction class but differ in microscopic realization or in the detailed form of repair mechanisms.
4.3. Stability Under Admissible Coarse–Graining
Universality classes differ in their stability under admissible coarse–graining.
Definition 4.3
(Coarse–graining stability). A universality class is said to be stable under admissible coarse–graining if every reconstruction process in the class retains nontrivial persistent obstruction under arbitrary iterations of admissible coarse–graining.
Corollary 4.4
(Coarse–graining stability of universality classes). Among reconstruction processes admitting nontrivial obstruction, only those in the codimension–2 universality class are stable under admissible coarse–graining.
Proof.
By Theorem 3.6, only codimension–2 defect support permits nontrivial loop obstruction compatible with finite interface capacity. Admissible coarse–graining suppresses local fluctuations while preserving homotopy–invariant linking. Bulk–supported (codimension–0) obstruction is eliminated, and wall–supported (codimension–1) obstruction fails to define stable homotopy invariants. Thus only codimension–2 universality classes persist under repeated coarse–graining. □
Remark.
The distinction between stable and unstable universality classes is independent of any metric or dynamical assumptions and depends solely on topological and feasibility considerations.
4.4. Universality Versus Microscopic Detail
Universality classes abstract away from microscopic implementation. Reconstruction processes with distinct local rules, constraint representations, or update mechanisms may belong to the same universality class provided admissibility suppresses obstruction in the same topological manner.
Remark.
This explains why a wide range of generative systems exhibit similar large–scale behavior despite microscopic diversity: feasibility constraints act as a universal filter that reduces a large space of possible reconstruction rules to a small number of topologically distinct outcomes, determined by persistent obstruction data [9].
4.5. Summary
Universality classes of reconstruction operations are determined by the topology of persistent obstruction and its detectability by closed loops. Among all admissible reconstruction processes, only codimension–2 defect support yields nontrivial, stable loop obstruction compatible with indefinite extension and admissible coarse–graining. This universality provides a realization–independent framework for classifying admissible generative processes based on feasibility rather than dynamics.
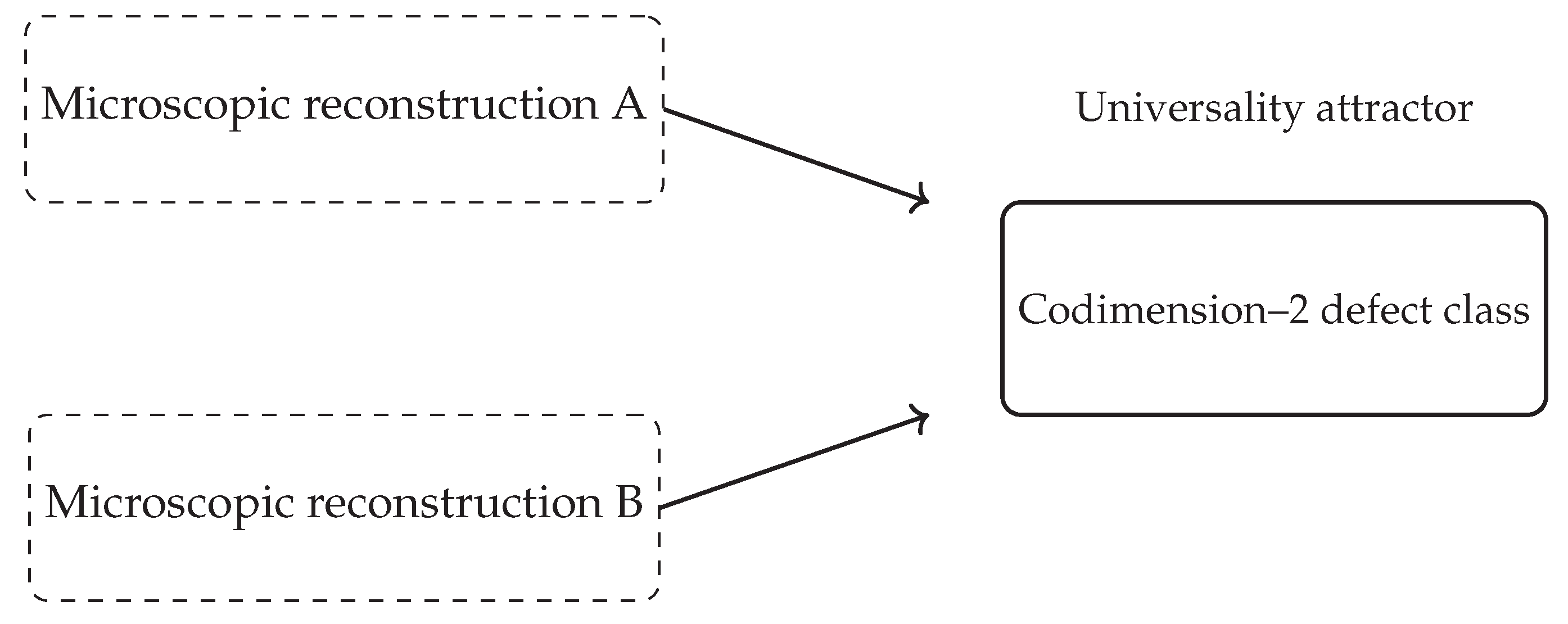
Figure 3.
Universality classes of admissible reconstruction. Distinct microscopic realizations flow under coarse–graining to the same admissible defect structure. Universality is determined by persistent topological support, not by microscopic dynamics.
Figure 3.
Universality classes of admissible reconstruction. Distinct microscopic realizations flow under coarse–graining to the same admissible defect structure. Universality is determined by persistent topological support, not by microscopic dynamics.
5. Worked Examples
This section provides explicit, fully worked examples illustrating the framework and the codimension admissibility theorem. Throughout, we take the obstruction monoid to be under addition, and interpret the loop obstruction as a holonomy (winding) charge. The repair cost is modeled by the minimal interface measure required to confine or screen the defect in a neighborhood of the defect support within the region controlled by a loop of characteristic size R.
5.1. Example I: Codimension–2 Defect in (Vortex Filament)
Let and let the defect support be the z–axis
Then D is a closed subset of codimension 2.
Complement and fundamental group.
Explicit loop family and loop obstruction.
For each radius and fixed height , define the loop
Define by
the winding number of the projection of ℓ to the –plane around the origin. For we have . If ℓ is homotopic to in , then ; if ℓ is null–homotopic, then . Thus H is a well–defined homomorphism and yields a nontrivial loop invariant.
Repair cost scaling and finite interface capacity.
In this example, admissible repair can be confined to a tubular neighborhood of D within the region controlled by . Let be a fixed coarse–graining thickness; the relevant interface is the boundary of a tube of radius around the segment of D intersecting the region. The measure of this interface scales like
which is subextensive relative to . Hence codimension–2 defects admit nontrivial loop obstruction compatible with finite interface capacity.
This example realizes the codimension–2 universality class: nontrivial loop obstruction exists (detected by linking) and remains stable under enlargement of the loop.
5.2. Example II: Codimension–1 Defect in (Domain Wall)
Let and let the defect support be the x–axis
a closed subset of codimension 1.
Complement and loop behavior.
The complement has two connected components:
each contractible. Therefore any loop contained in is null–homotopic within its component, and in particular
[5]. Hence there is no nontrivial homotopy–invariant loop obstruction map .
Why “crossing number” is not an admissible loop invariant.
One might attempt to define an obstruction by counting the number of intersections of a loop with D. However, this quantity is not a homotopy invariant of loops in , because admissible homotopies are not allowed to cross D; loops in the complement have zero intersection number by definition. Any obstruction defined using intersection with D necessarily depends on geometric choices outside the complement and therefore does not descend to .
Repair cost scaling.
If obstruction is associated with maintaining a coherent identification across the wall, then repair requires controlling interface mismatch along segments of D spanning the region of size R. For loops of characteristic size R whose enclosed region abuts the wall, the minimal repair interface grows like the wall length within the region:
This is not subextensive relative to in the sense required by finite interface capacity when such repairs must be performed persistently across enlarging regions: the repair is hypersurface–supported and cannot be confined to a lower–dimensional linking core. Accordingly, codimension–1 obstruction is unstable under indefinite continuation, and no nontrivial loop invariant exists in the complement.
This example demonstrates the mechanism behind the codimension admissibility theorem: wall–like defects do not support loop–detectable holonomy invariants.
5.3. Example III: Codimension– Defect in (Point Defect)
Let and let the defect support be a single point
which has codimension 3.
Complement and fundamental group.
The complement deformation retracts onto the sphere :
and therefore
Higher invariants versus loop invariants.
Although point defects in can be detected by higher homotopy data (e.g. by of the complement), they are invisible to the loop obstruction framework of this paper, which is intentionally based on loop composition and –holonomy. This distinction provides an explicit example of how the framework selects codimension–2 defects as the unique carriers of loop–detectable persistent obstruction [12].
Repair cost.
Any repair localized near the point defect can be confined to a bounded neighborhood of D and therefore has bounded cost independent of R. However, since no nontrivial loop obstruction exists, such defects do not contribute to the universality classes classified in Section 3 and Section 4.
This example shows that codimension supports cannot carry nontrivial loop holonomy, in agreement with Theorem 3.6.
6. Relation to Generative and Physical Models
The classification developed in this work is formulated in abstract topological terms and does not depend on any specific geometric, analytic, or dynamical assumptions. Nevertheless, it applies uniformly to a broad class of generative systems in mathematics, physics, and computer science. Any process that constructs global structure through repeated local extension subject to feasibility constraints falls within its scope, including classical gluing and assembly procedures in topology and geometry [9,14].
The purpose of this section is interpretative rather than foundational. No new results are introduced here. Instead, we indicate how the codimension–based admissibility classification derived in Section 2, Section 3 and Section 4 manifests across representative classes of reconstruction models.
6.1. Discrete and Combinatorial Growth Models
In discrete growth models—such as cellular complexes, random tilings, lattice aggregation, and combinatorial assembly—local update rules generate global structure by accretion. Examples include CW–complex construction, simplicial and cubical complexes, and rewriting systems on graphs and complexes [5]. In these settings, admissibility corresponds to the absence of incompatible local constraints under repeated attachment.
Loop obstruction arises naturally when attachment rules fail to close consistently around cycles in the underlying combinatorial structure, as in obstruction–theoretic treatments of cellular extensions [15]. The results of Section 3 imply that only those growth rules whose induced obstruction can be confined to codimension–2 substructures are compatible with persistent reconstruction under finite interface capacity. Bulk– or hypersurface–supported inconsistencies are suppressed under continued growth, while codimension–2 defects persist as robust topological features of the assembled structure.
This behavior is consistent with classical results on defect localization and linking in combinatorial topology [14], but here arises as a consequence of feasibility under indefinite extension rather than as a property of any particular construction.
6.2. Geometric and Manifold Reconstruction
Geometric reconstruction schemes—including atlas gluing, patchwise manifold construction, and discrete–to–continuum limits—also fall naturally under the admissibility framework. Here, reconstruction proceeds by extending local coordinate patches subject to overlap compatibility, as in standard constructions of smooth and topological manifolds [7].
In this setting, loop obstruction corresponds to transition–function holonomy, a familiar topological diagnostic in differential and geometric topology [2]. From the perspective developed here, the appearance of curvature, torsion, and related geometric invariants reflects the presence of codimension–2 obstruction detected by loops encircling regions of mismatch. The codimension admissibility theorem isolates the topological conditions under which such obstruction can persist under refinement and admissible re–gluing.
Importantly, no geometric dynamics are assumed. The classification concerns only the topological support and detectability of obstruction under composition, independent of any metric or variational structure.
6.3. Reconstruction–Based Physical Frameworks
Reconstruction–first approaches in physics provide natural realizations of the abstract framework considered here. In such approaches, spacetime and fields are not assumed a priori but emerge from admissible gluing of local structures. Consistency conditions are transported across interfaces, and obstruction accumulation plays a central role in selecting viable large–scale configurations, closely paralleling topological formulations of gauge theory and defect classification [13].
Remark.
In many physical models, physically relevant excitations—including gauge fluxes, vortices, and confinement–inducing defects—are supported on codimension–2 substructures. The present results do not explain the dynamics or energetics of such excitations, but clarify the topological reason why codimension–2 support is compatible with persistent, loop–detectable obstruction under feasibility constraints [12].
From this viewpoint, the recurrence of codimension–2 structures across physical reconstruction models is not accidental, but reflects a general topological constraint on admissible extension under finite interface capacity.
6.4. Universality Across Implementations
A key consequence of the topological formulation is that the admissibility classes identified here are insensitive to microscopic detail. Distinct realizations—discrete or continuous, deterministic or stochastic—may belong to the same universality class provided their extension rules suppress obstruction in the same topological manner.
This universality explains why disparate generative systems often exhibit similar large–scale defect structures and stability properties. Feasibility acts as a coarse–graining filter that reduces a large space of possible reconstruction rules to a small number of topologically distinct outcomes, classified by the codimension and detectability of persistent obstruction [9].
6.5. Summary
The codimension–based classification of admissible reconstruction operations provides a unifying topological language for understanding stability and obstruction across generative models. Without invoking dynamics or model–specific assumptions, it constrains the possible large–scale behaviors of reconstruction processes in mathematics and physics alike, identifying codimension–2 defect support as the unique carrier of nontrivial, loop–detectable structure compatible with indefinite extension.
7. Discussion and Outlook
This work establishes that reconstruction processes governed by feasibility rather than dynamics admit a sharply constrained topological classification. When global structure is built through repeated local extension, admissibility suppresses incompatible compositions and selects only those obstruction types that remain compatible with indefinite continuation. Under minimal and realization–independent assumptions—indefinite reconstruction and finite interface capacity—we have shown that only a restricted class of obstruction can persist. In particular, codimension–2 defect support emerges as the unique carrier of nontrivial, loop–detectable obstruction compatible with persistent large–scale reconstruction. This result refines classical insights from obstruction theory and linking by identifying codimension–2 support not merely as possible, but as necessary under feasibility constraints [2,14,15].
A central conceptual outcome is that admissibility is inherently topological. It is determined by how obstruction accumulates under composition and how it is detected by closed reconstruction loops, rather than by rates, energies, or equations of motion. Within this framework, familiar notions such as holonomy, curvature, flux, and vortex–like defects are interpreted as manifestations of feasibility constraints imposed by reconstruction itself. From this perspective, the ubiquity of codimension–2 structures across generative systems is not accidental but follows from general constraints on how local compatibility can be extended globally, consistent with classical treatments of topological defects [12,13].
Scope and interpretation. The results of this paper are purely topological. No assumptions are made about dynamics, geometry, physical laws, or empirical mechanisms, and no new physical claims are introduced. Section 6 should be understood as interpretative, illustrating how the classification applies to representative reconstruction models rather than proposing new model–specific conclusions. The codimension admissibility theorem identifies a structural constraint on admissible extension that holds whenever persistent obstruction is detected by closed composition, independent of realization.
The analysis deliberately abstracts away from metric, analytic, and probabilistic structure. As a result, the conclusions apply uniformly to discrete, combinatorial, and continuum realizations, provided that admissible extension and loop diagnostics are well defined. The classification depends only on the topological behavior of obstruction under admissible homotopy, as formalized through reconstruction paths, loop obstruction, and the associated groupoid and cocycle structures summarized in Appendix A [4].
Several directions for future work naturally follow. First, the codimension–2 universality class admits further internal refinement. Distinct subclasses may be distinguished by the algebraic structure of the obstruction monoid, the presence of torsion, or the behavior of higher–order loop and surface invariants, suggesting connections with classical obstruction theory and characteristic classes [9,15]. Second, extending the framework to reconstruction processes with hierarchical or nested structure may reveal multi–scale admissibility phenomena and secondary universality classes, paralleling stratified and filtered topological spaces. Third, explicit realizations in geometric or algebraic settings may be used to test how strongly feasibility alone constrains emergent symmetries or effective descriptions.
More broadly, the results support a unifying viewpoint: many robust features of emergent structure are dictated not by detailed microscopic rules, but by topological constraints on how local compatibility can be coherently extended. Admissibility acts as a universal filter on generative processes, sharply limiting the space of viable large–scale organizations. In this sense, topology serves not merely as a descriptive language for reconstruction, but as a foundational principle governing which structures can persist under indefinite extension, in accordance with its central role as a classifier of global structure across mathematics [9,14].
Author Contributions
All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
The original contributions presented in this study are included in the article. Further inquiries can be directed to the corresponding author.
Conflicts of Interest
The author declares no conflicts of interest.
Appendix A. Reconstruction as a Path Groupoid with Obstruction Cocycle
This appendix provides a concrete topological reformulation of the reconstruction framework used in the main text. Its purpose is twofold: (i) to embed feasibility–governed reconstruction into standard categorical and topological language, and (ii) to show that loop obstruction arises naturally as a holonomy–type invariant. No assumptions are introduced beyond those stated in Section 2 and Section 3. All results in this appendix are reformulations of statements proved in the main text.
Appendix A.1. The Reconstruction Path Category
Let be the configuration space introduced in Section 2, equipped with the admissible extension relation ≺. We define a small category , called the reconstruction path category, as follows:
- Objects of are configurations .
- Morphisms are finite admissible reconstruction paths
- Composition is given by concatenation of paths whenever interface compatibility permits.
- Identity morphisms are trivial paths of length zero.
This construction parallels the standard path category or path groupoid associated with a topological space, but is defined purely in terms of admissible compositional extension rather than continuous paths [4]. Invertibility of morphisms is not assumed; when admissible local inverses exist up to coarse–graining, restricts to a groupoid, but the categorical formulation suffices for all purposes here.
Appendix A.2. Obstruction as a Categorical 1–Cocycle
Let denote the abelian monoid of obstruction data introduced in Section 2.
Definition A.1
(Obstruction cocycle). An obstruction cocycle is a map
satisfying:
- 1.
- Locality: depends only on the local extension interfaces traversed by .
- 2.
- Cocycle condition:whenever composition is defined.
This definition is formally identical to that of a 1–cocycle on a small category or groupoid with values in an abelian monoid [14,15]. No linear, metric, or differential structure is required.
The pathwise accumulation of obstruction defined in Section 2 is precisely the evaluation of this cocycle on morphisms of .
Appendix A.3. Loop Obstruction as Holonomy
A closed reconstruction loop corresponds to a morphism in .
Definition A.2
(Loop holonomy). The loop obstruction associated with a closed reconstruction loop is the holonomy
Proposition A.3.
The loop obstruction depends only on the admissible homotopy class of and defines a homomorphism on loop classes.
Proof.
This follows directly from the cocycle condition and from invariance under insertion or removal of subpaths with vanishing total obstruction, as established in Section 2. □
Thus loop obstruction is precisely the holonomy of the obstruction cocycle around closed morphisms. This places the reconstruction framework within standard holonomy theory, generalized from continuous connections to compositional categories [2].
Appendix A.4. Defect Support and Codimension
Assume that reconstruction admits a coarse–grained description on a topological space , as in Section 3. Let denote the minimal closed subset such that all reconstruction loops contained in have vanishing loop obstruction.
Definition A.4
(Defect support). A subset is called a defect support if the restriction of the obstruction cocycle to loops in is trivial.
In this case, loop obstruction factors through the fundamental group of the complement:
Proposition A.5.
If H is nontrivial and stable under admissible coarse–graining, then the defect support D must have codimension exactly 2 in .
Proof.
This statement is equivalent to Theorem 3.6. For defect support of codimension 0 or 1, loop obstruction fails to define a homotopy invariant or requires repair cost incompatible with finite interface capacity. For codimension , the complement is simply connected and admits no nontrivial loop invariant. Only codimension–2 support permits nontrivial holonomy detected by linking and compatible with persistent reconstruction. □
This reformulation makes explicit that the codimension admissibility theorem is a statement about the topology of complements and holonomy, not about specific reconstruction rules.
Appendix A.5. Illustrative Example: CW–Complex Attachment
As a concrete instantiation, consider a CW–complex constructed by attaching 2–cells to a 1–skeleton subject to a cocycle constraint on overlaps [5]. Local attachment may be admissible on contractible subcomplexes, while failure of the cocycle condition around a loop in the 1–skeleton produces a nontrivial obstruction class.
In this case, the obstruction is supported on codimension–2 subsets of the CW–complex (points in dimension 2, lines in dimension 3) and is detected precisely by loop holonomy in the complement. This example illustrates how classical obstruction phenomena are recovered as special cases of the feasibility–governed reconstruction framework.
Appendix A.6. Relation to Classical Obstruction Theory
Classical obstruction theory studies the extension of sections, maps, or bundles over skeleta and typically treats obstruction as a binary obstruction to further extension [15]. The framework developed in this paper generalizes this viewpoint by:
- 1.
- treating extension as a directed compositional process rather than a single step,
- 2.
- allowing obstruction to accumulate under composition,
- 3.
- classifying admissibility in terms of persistence under indefinite extension.
From this perspective, feasibility–governed reconstruction may be viewed as an abstraction of obstruction theory adapted to generative and iterative settings. The groupoid and cocycle formulation provided here demonstrates that the main results of the paper are grounded in standard topological structures, while extending their scope to problems of persistence, feasibility, and universality.
References
- Alexander, J.W. Topological invariants of knots and links. Trans. Amer. Math. Soc. 1928, 30, 275–306. [Google Scholar] [CrossRef]
- Bott, R.; Tu, L.W. Differential Forms in Algebraic Topology; Springer: New York, NY, USA, 1982. [Google Scholar]
- Bredon, G.E. Sheaf Theory, 2nd ed.; Springer: New York, NY, USA, 1997. [Google Scholar]
- Brown, R. Topology and Groupoids; BookSurge Publishing: Charleston, SC, USA, 2006. [Google Scholar]
- Hatcher, A. Algebraic Topology; Cambridge University Press: Cambridge, UK, 2002. [Google Scholar]
- Kashiwara, M.; Schapira, P. Categories and Sheaves; Springer: Berlin, Germany, 2006. [Google Scholar]
- Lee, J.M. Introduction to Topological Manifolds, 2nd ed.; Springer: New York, NY, USA, 2011. [Google Scholar]
- Lyndon, R.C.; Schupp, P.E. Combinatorial Group Theory; Springer: Berlin, Germany, 1977. [Google Scholar]
- May, J.P. A Concise Course in Algebraic Topology; University of Chicago Press: Chicago, IL, USA, 1999. [Google Scholar]
- Milnor, J. Lectures on the h-Cobordism Theorem; Princeton University Press: Princeton, NJ, USA, 1965. [Google Scholar]
- Milnor, J. Infinite cyclic coverings. In Conference on the Topology of Manifolds; Prindle, Weber & Schmidt: Boston, MA, USA, 1968; pp. 115–133. [Google Scholar]
- Mermin, N.D. The topological theory of defects in ordered media. Rev. Mod. Phys. 1979, 51, 591–648. [Google Scholar] [CrossRef]
- Nakahara, M. Geometry, Topology and Physics, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2003. [Google Scholar]
- Spanier, E.H. Algebraic Topology; McGraw–Hill: New York, NY, USA, 1966. [Google Scholar]
- Steenrod, N. The Topology of Fibre Bundles; Princeton University Press: Princeton, NJ, USA, 1951. [Google Scholar]
- Whitehead, J.H.C. Combinatorial homotopy. II. Bull. Amer. Math. Soc. 1949, 55, 453–496. [Google Scholar] [CrossRef]
Figure 1.
Loop diagnostics for defect support. Closed loops detect obstruction only through transverse linking. Bulk (codimension–0) obstruction fails to define a stable loop invariant and requires volumetric repair under extension, wall–like (codimension–1) obstruction yields unstable diagnostics under admissible homotopy, while codimension–2 defect support produces stable, loop–detectable obstruction compatible with finite interface capacity.
Figure 1.
Loop diagnostics for defect support. Closed loops detect obstruction only through transverse linking. Bulk (codimension–0) obstruction fails to define a stable loop invariant and requires volumetric repair under extension, wall–like (codimension–1) obstruction yields unstable diagnostics under admissible homotopy, while codimension–2 defect support produces stable, loop–detectable obstruction compatible with finite interface capacity.
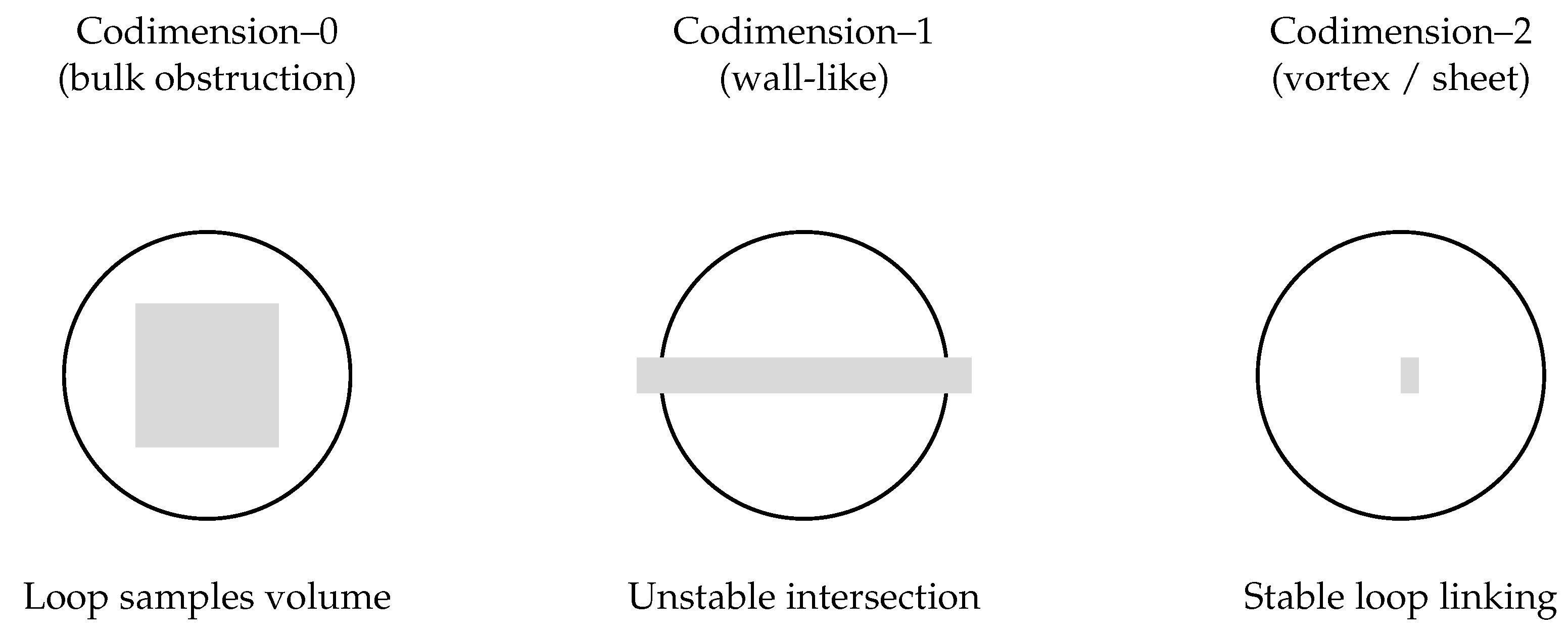
Figure 2.
Loop enlargement as a diagnostic of repair cost. The loop obstruction is a scale–independent topological invariant determined by linking. For bulk (codimension–0) defect support, maintaining admissibility requires volumetric repair. Codimension–1 defects intersect enlarging loops but fail to define stable loop invariants. Only codimension–2 defect support admits loop–detectable obstruction together with subextensive repair cost compatible with finite interface capacity.
Figure 2.
Loop enlargement as a diagnostic of repair cost. The loop obstruction is a scale–independent topological invariant determined by linking. For bulk (codimension–0) defect support, maintaining admissibility requires volumetric repair. Codimension–1 defects intersect enlarging loops but fail to define stable loop invariants. Only codimension–2 defect support admits loop–detectable obstruction together with subextensive repair cost compatible with finite interface capacity.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



