
Submitted:
25 January 2026
Posted:
27 January 2026
You are already at the latest version
Abstract
A moving permanent magnet induces currents in nearby conductors and superconducting loops. This electrodynamic back-action produces forces that are history-dependent and, in general, cannot be represented by a conservative potential depending only on instantaneous separation. We derive a compact state--space model for the axial motion of a magnetic dipole coupled to an $N$-turn loop with inductance $L$ and resistance $R$. Using Faraday's law for the flux linkage $\Lambda(x)=N\Phi(x)$, the coupled dynamics are \[ L\dot i + R i = -\Lambda'(x)\dot x,\qquad F_{\mathrm{em}}(t)= i(t)\,\Lambda'(x(t)), \] which defines a passive, causal magnetomechanical memory element. Linearizing about an operating point $x_0$ yields an exact complex dynamic stiffness \[ K_{\mathrm{em}}(\omega) \equiv -\frac{F_{\mathrm{em}}(\omega)}{X(\omega)} = \frac{\Lambda'(x_0)^2\, i\omega}{R+i\omega L} = k_\infty\,\frac{i\omega\tau}{1+i\omega\tau}, \quad k_\infty=\frac{\Lambda'(x_0)^2}{L},\ \tau=\frac{L}{R}. \] We show that this back-action is exactly equivalent to a mechanical Maxwell element, derive closed-form expressions for added stiffness and added damping, and provide direct identification formulas for $(\tau,k_\infty)$ from measured complex stiffness. The dipole--loop geometry further admits an analytic design rule: the coupling gradient $|\Lambda'(x_0)|$ is maximized at $x_0=a/2$ where $a$ is the loop radius. Finally, we connect commonly proposed \emph{jerk-like} and \emph{absement-like} terms to controlled low- and high-frequency asymptotic expansions of the same passive kernel (with explicit validity limits). All predictions are validated by reproducible Python simulations, and code to generate figures and data is provided.
Keywords:
magnetic dipole
; permanent magnet
; induced current
; Faraday’s law
; flux linkage
; superconducting loop
; inductance
; resistance
; electrodynamic back-action
; state–space model
; dynamic stiffness
; Maxwell element
; added damping
; added stiffness
1. Introduction
Magnet–conductor and magnet–superconductor interactions are central to magnetic damping, eddy-current brakes, inductive sensing, levitation, and magnetomechanical devices. In many reduced-order mechanical models, magnetic effects are represented as either (i) conservative stiffness (from magnetostatics) or (ii) viscous damping (from induced currents). However, Maxwell–Faraday induction with finite circuit inductance implies a history-dependent back-action force whose effective stiffness and loss vary with frequency [1,2,3,4].
Goal and scope.
We treat a permanent magnet as a point dipole and focus on 1D axial motion relative to a single loop/coil. This is the minimal setting that: (i) is derivable directly from Maxwell–Faraday induction, (ii) yields a causal memory kernel with a single relaxation time, and (iii) produces clear, testable dynamic-stiffness and dissipation signatures.
Main contributions.
Within this minimal magnetomechanical system we provide:
- 1.
- an energy-consistent state–space model for magnet motion coupled to an RL loop;
- 2.
- an exact complex dynamic stiffness and its decomposition into added stiffness and added damping;
- 3.
- a Maxwell-element equivalence (spring–dashpot series) guaranteeing passivity and offering mechanical intuition [6];
- 4.
- closed-form identification formulas for from complex stiffness data;
- 5.
- a geometry-based design rule: is maximized at ;
- 6.
- a controlled interpretation of “jerk” and “absement” as asymptotes of the same passive memory element (not ad hoc constitutive laws).
2. Dipole Flux and Flux-Linkage Gradient
2.1. Geometry and Dipole Approximation
Consider a magnetic dipole moment located on the symmetry axis of a circular loop of radius a lying in the plane . Let denote the dipole’s axial position measured from the loop center (so is “above” the loop). The dipole approximation is appropriate when distances are large compared to magnet dimensions [1,2].
2.2. Flux via Vector Potential
For a dipole at the origin, the azimuthal component of the vector potential in cylindrical coordinates is [1]
For a loop of radius a at axial offset x, the flux through one turn is obtained by :
Its derivative is
2.3. Flux Linkage for an N-Turn Loop
For an N-turn loop/coil, the flux linkage (Weber-turns) is
2.4. Scaling Laws and Optimal Operating Point
The electromechanical coupling enters through the gradient
Using , the explicit dipole–loop coupling gradient is
Thus scales linearly with m and N and depends on geometry through the dimensionless ratio .
Optimal operating point.
Define and
Differentiating,
so the maximum occurs at . Therefore,
maximizes and, consequently, maximizes the measurable back-action signatures derived below (added stiffness and added damping) within the dipole approximation.
3. Coupled State–Space Model: Mechanics + Circuit
3.1. Circuit Equation (Faraday + Ohm + Inductance)
For an isolated loop with resistance R and inductance L, the flux linkage through the loop is
Faraday’s law gives the induced electromotive force . With loop voltage ,
or equivalently
3.2. Electromagnetic Force
Using magnetic co-energy (or standard electromechanical transduction arguments), the axial electromagnetic force is
The sign is determined by and ; Lenz’s law is enforced automatically through Equation (9).
3.3. Mechanical Equation and Full State–Space Form
To obtain bounded motion and enable frequency-domain validation, we consider a 1D mass–spring–damper with an external drive :
with a chosen operating point.
The full coupled system is a state–space ODE for :
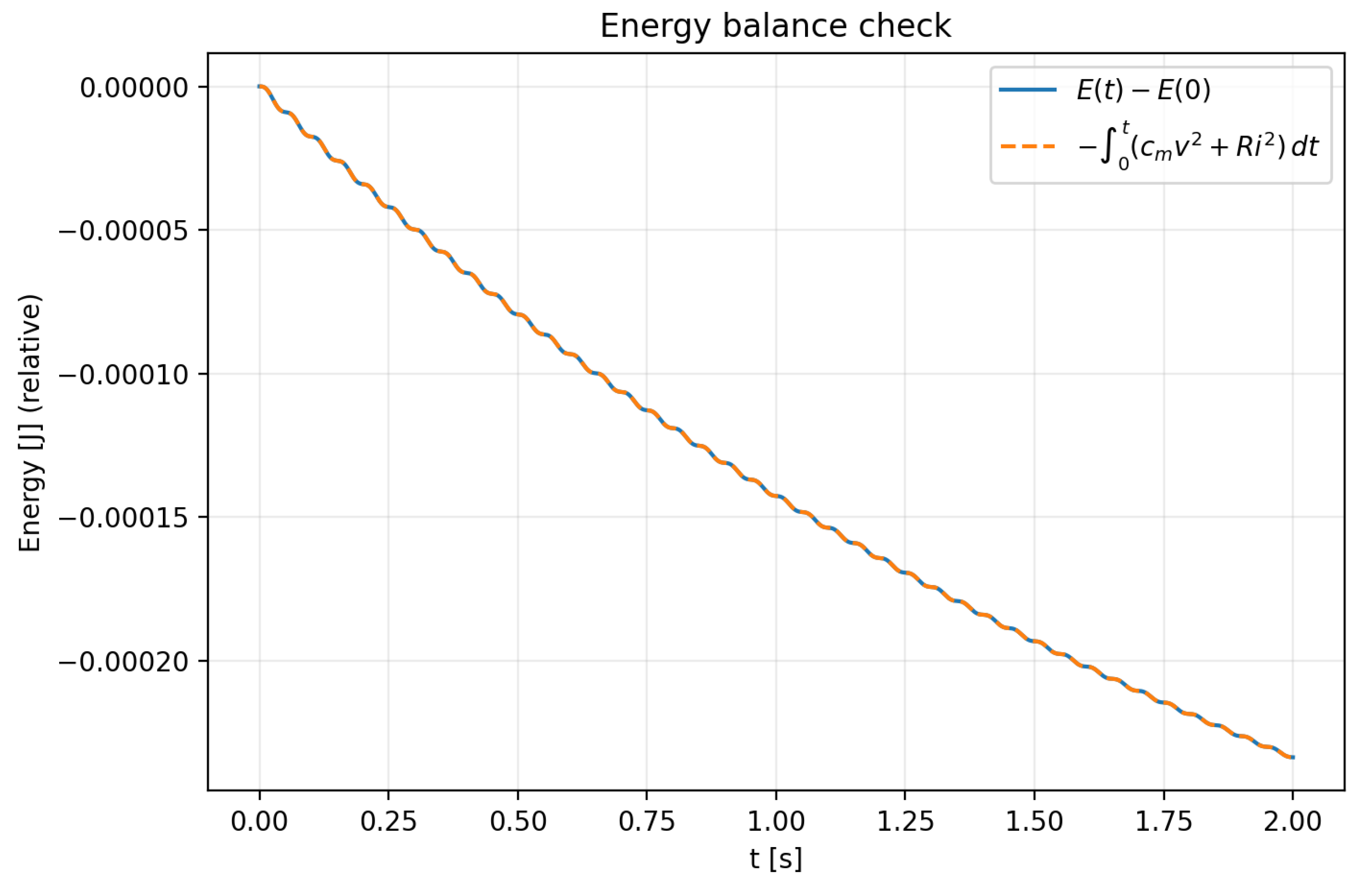
3.4. Energy Identity and Passivity
4. Linearization and Frequency-Domain Response
4.1. Linearization at an Operating Point
For small oscillations about , set
and approximate . Then
and the electromechanical coupling becomes linear time-invariant.
4.2. Exact Causal Memory Kernel
Solving the first-order circuit equation gives (for )
Hence the electromagnetic force is
This is a history-dependent force: an exponential convolution of velocity.
4.3. Complex Dynamic Stiffness
4.4. Exact Time-Domain Constitutive Law (Fundamental) and Internal-State Form
The asymptotic expansions in Section 5 are useful for intuition, but they are not fundamental force laws: truncations are valid only in their corresponding limits and can break passivity if applied outside them. In contrast, the linearized dipole–loop coupling admits an exact and local-in-time constitutive equation for .
From Equation (17), eliminate to obtain
Define
Then
In Laplace-domain operator form (s the Laplace variable),
which reduces to Equation (23) on .
Leaky-absement internal state (bounded memory).
Define an exponentially weighted (leaky) absement-like state
Then
and (after transients decay) the force may be written compactly as
This internal-state representation is exact for the linearized model (up to an exponentially decaying transient term) and provides a well-posed “absement-like” variable that remains bounded for bounded .
4.5. Added Stiffness and Added Damping; Maxwell-Element Equivalence
Write
A common mechanical interpretation is to define the added stiffness and added damping via
From Equation (24), with ,
Thus the back-action behaves as: (i) predominantly viscous () for ; and (ii) predominantly elastic () for .
Maxwell-element equivalence.
The Laplace-domain stiffness Equation (28) has the form
which is identical to the dynamic stiffness of a Maxwell viscoelastic element: a spring of stiffness in series with a dashpot of coefficient [6]. This provides an immediate passivity guarantee and a useful mechanical analogue: the resistor dissipates energy (dashpot-like low-frequency behavior), while the inductor stores energy (spring-like high-frequency behavior).
4.6. Direct Identification of and from Complex Stiffness
Because Equation (24) depends only on and , the parameters can be identified directly from measured complex stiffness data.
Let for . Then
Eliminating also yields
These identities provide a direct route to parameter extraction from impedance or dynamic-stiffness measurements.
5. Asymptotic Expansions: Jerk and Absement Limits
The exact memory force Equation (19) (or equivalently the exact constitutive law Equation (27)) is passive and well posed. However, it is often useful to approximate it by local derivative operators in a low-frequency regime, or by inverse-derivative (integral) operators in a high-frequency regime. We make these connections explicit and state validity constraints.
5.1. Low-Frequency Expansion (Derivative / Jerk Correction)
For , expand Equation (23):
In time-domain operator language (replace ), the corresponding force expansion is
The third derivative term is an explicit jerk correction. Truncating Equation (37) beyond its range of validity () can break passivity, so it should be used only as an asymptotic approximation.
5.2. High-Frequency Expansion (Absement-Like Asymptote)
For , expand Equation (23) as a series in :
Equivalently, in Laplace form Equation (28), for ,
Since by definition, the leading high-frequency time-domain approximation is
where is the (non-leaky) absement of the small displacement about the operating point.
Important note (why this is not fundamental).
The raw integral can drift under DC offsets and is therefore best interpreted as an asymptotic representation for oscillatory motions with zero mean and . For general signals and to preserve boundedness and passivity, the exact internal-state form (leaky absement) should be used.
6. Resistive Loss Under Prescribed Harmonic Motion
Assume prescribed harmonic displacement in the linear regime. The current amplitude from Equation (17) is
The cycle-averaged resistive loss is
This exhibits two asymptotic regimes:
6.0.0.7. Remark.
The scaling here is for prescribed displacement amplitude X. Under alternative experimental constraints (e.g. prescribed drive force), observed frequency scaling can differ; Equation (21) provides the appropriate transfer function for those cases.
7. Numerical Methods and Reproducibility
All figures and datasets in this manuscript are generated using a single Python script (magnet_loop_backaction.py) using numpy, scipy, and matplotlib. The script produces:
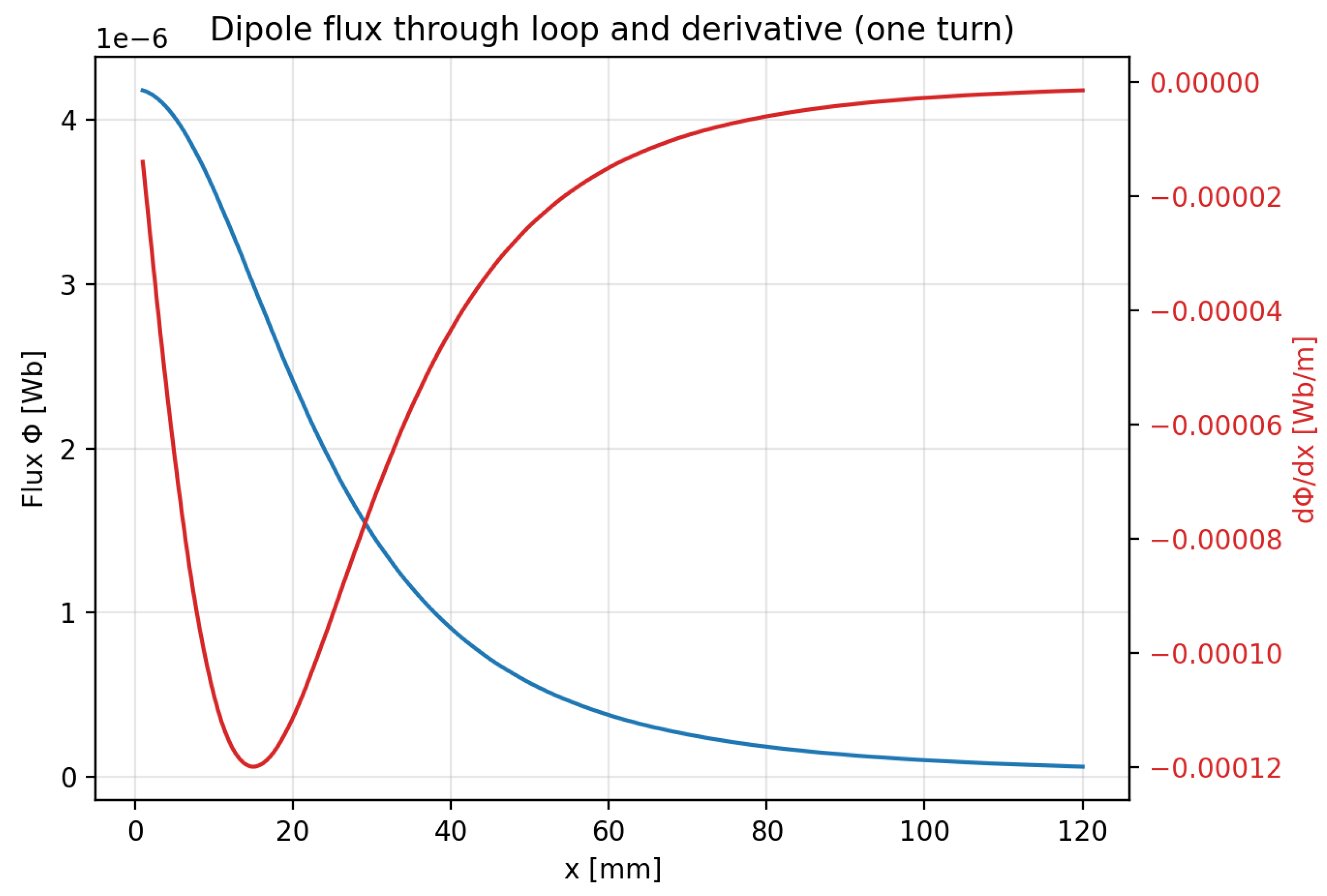
- and for the dipole–loop geometry ();
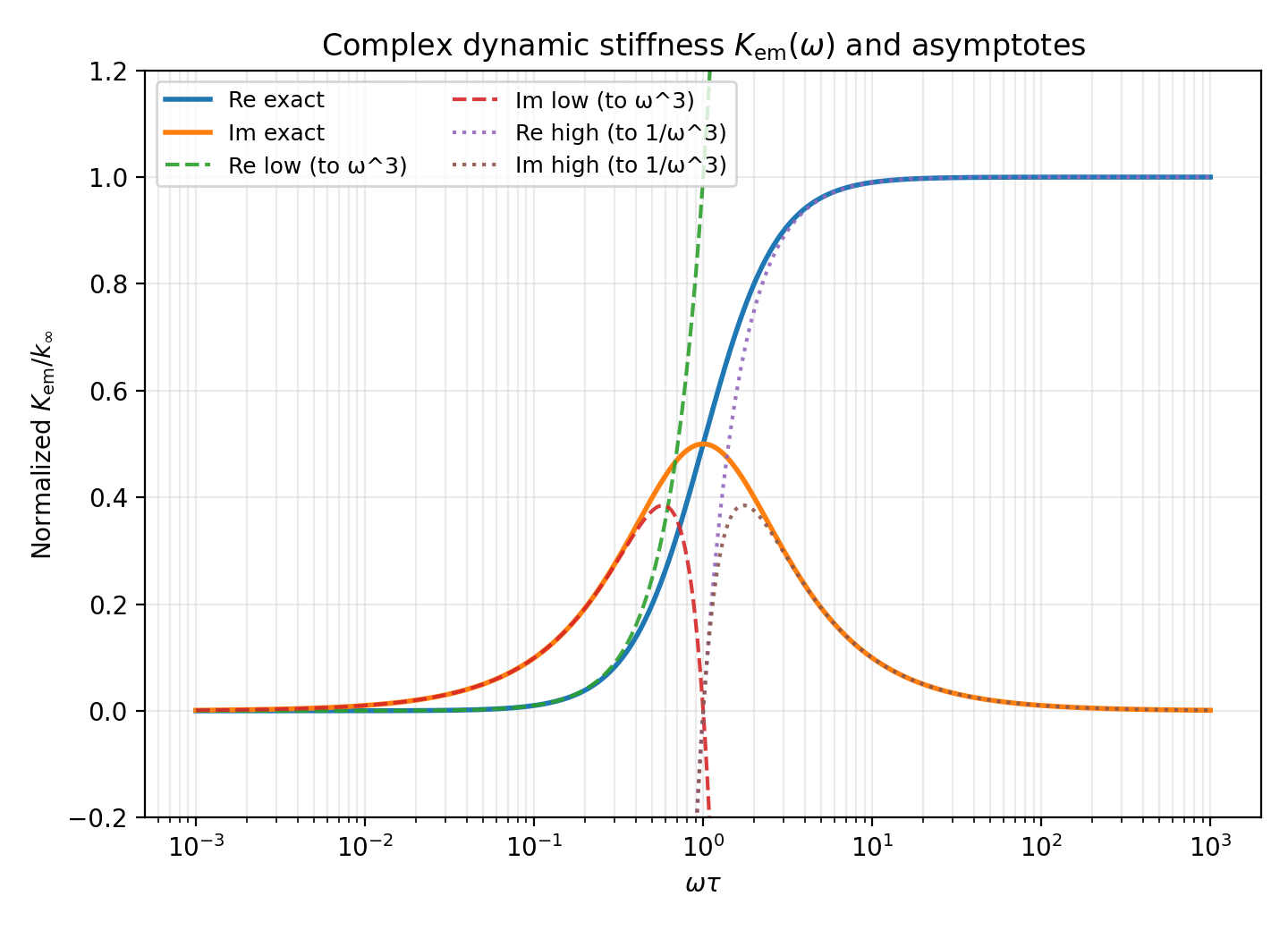
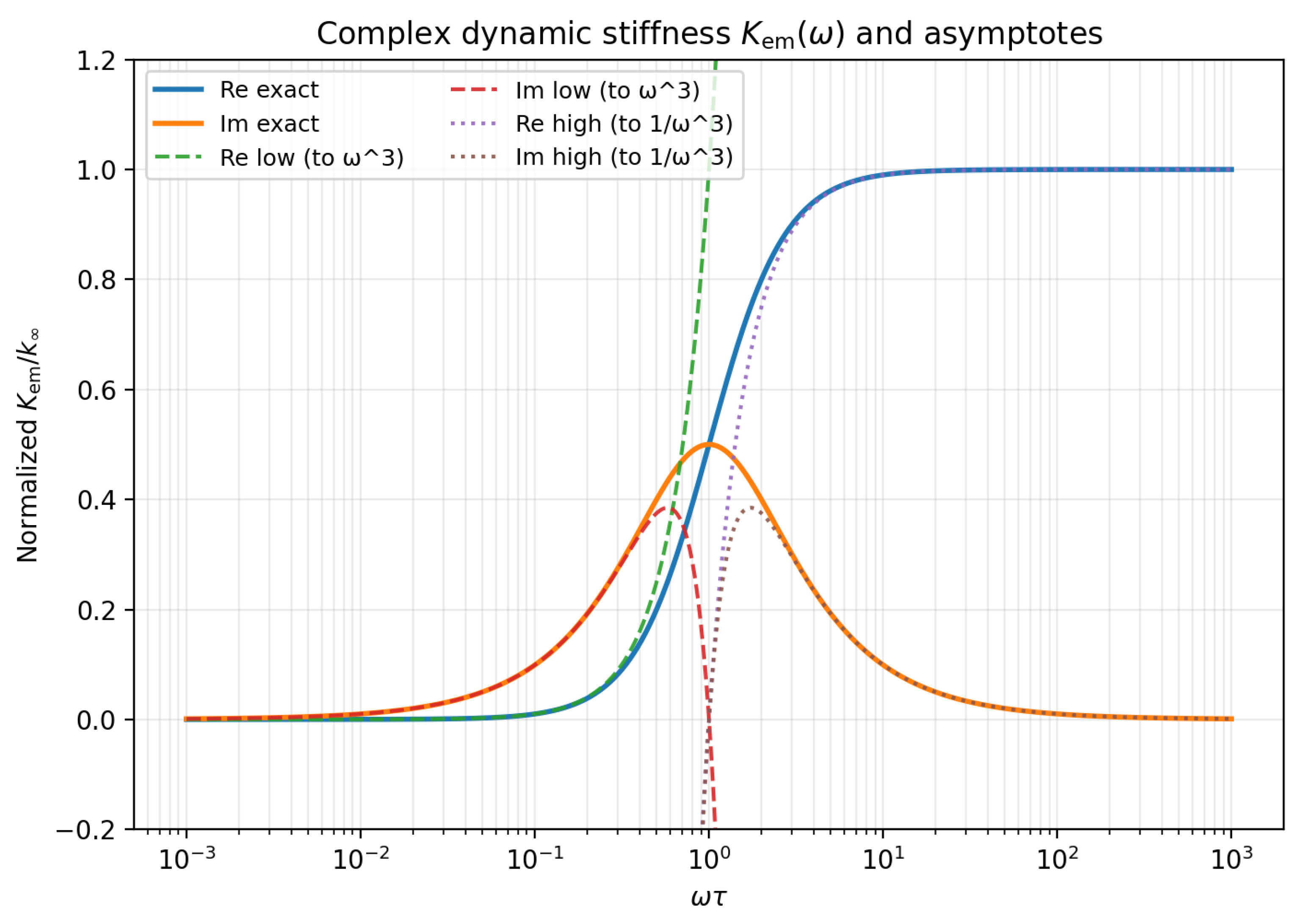
- normalized and its low/high-frequency asymptotes ();
- vs frequency and its asymptotes (Equation (42));
8. Results
8.1. Example Parameters and Derived Back-Action Scales
For these parameters, . The optimal point Equation (6) would be , which would increase (and thus and ) by approximately relative to the present choice.
8.2. Flux and Coupling Gradient
Figure 1.
Dipole flux through a circular loop and its derivative: and from .
8.3. Complex Dynamic Stiffness and Asymptotes
Figure 2.
Normalized complex dynamic stiffness vs from Equation (23), with low-frequency (derivative/jerk) and high-frequency (integral/absement-like) asymptotes.
Figure 2.
Normalized complex dynamic stiffness vs from Equation (23), with low-frequency (derivative/jerk) and high-frequency (integral/absement-like) asymptotes.
8.4. Frequency Scaling of Resistive Loss
Figure 3.
Cycle-averaged resistive loss under prescribed harmonic displacement Equation (42), showing for and a frequency-independent plateau for .
Figure 3.
Cycle-averaged resistive loss under prescribed harmonic displacement Equation (42), showing for and a frequency-independent plateau for .
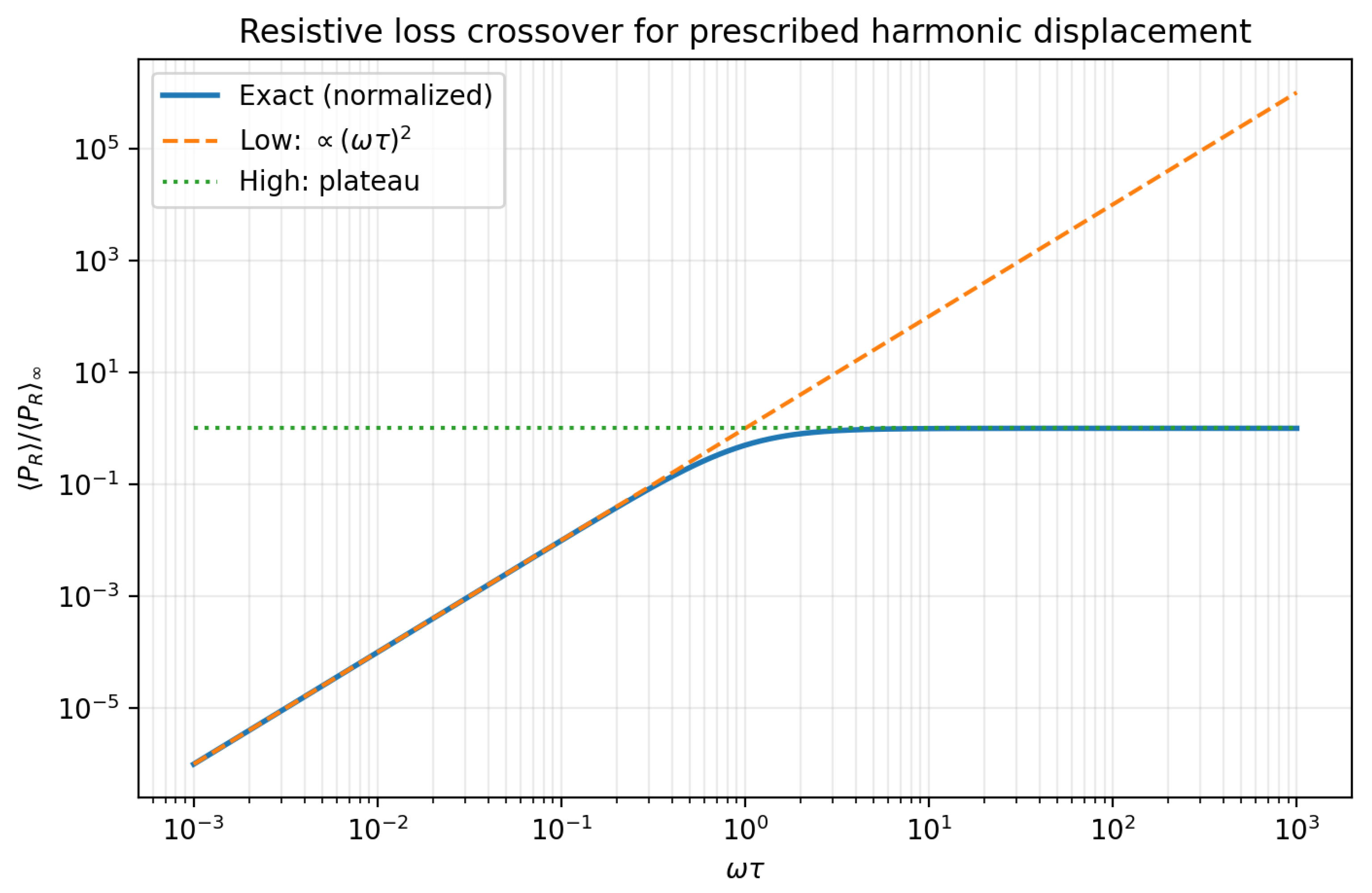
Figure 4.
Example ring-down simulation of the coupled nonlinear state–space system 12.
Figure 4.
Example ring-down simulation of the coupled nonlinear state–space system 12.
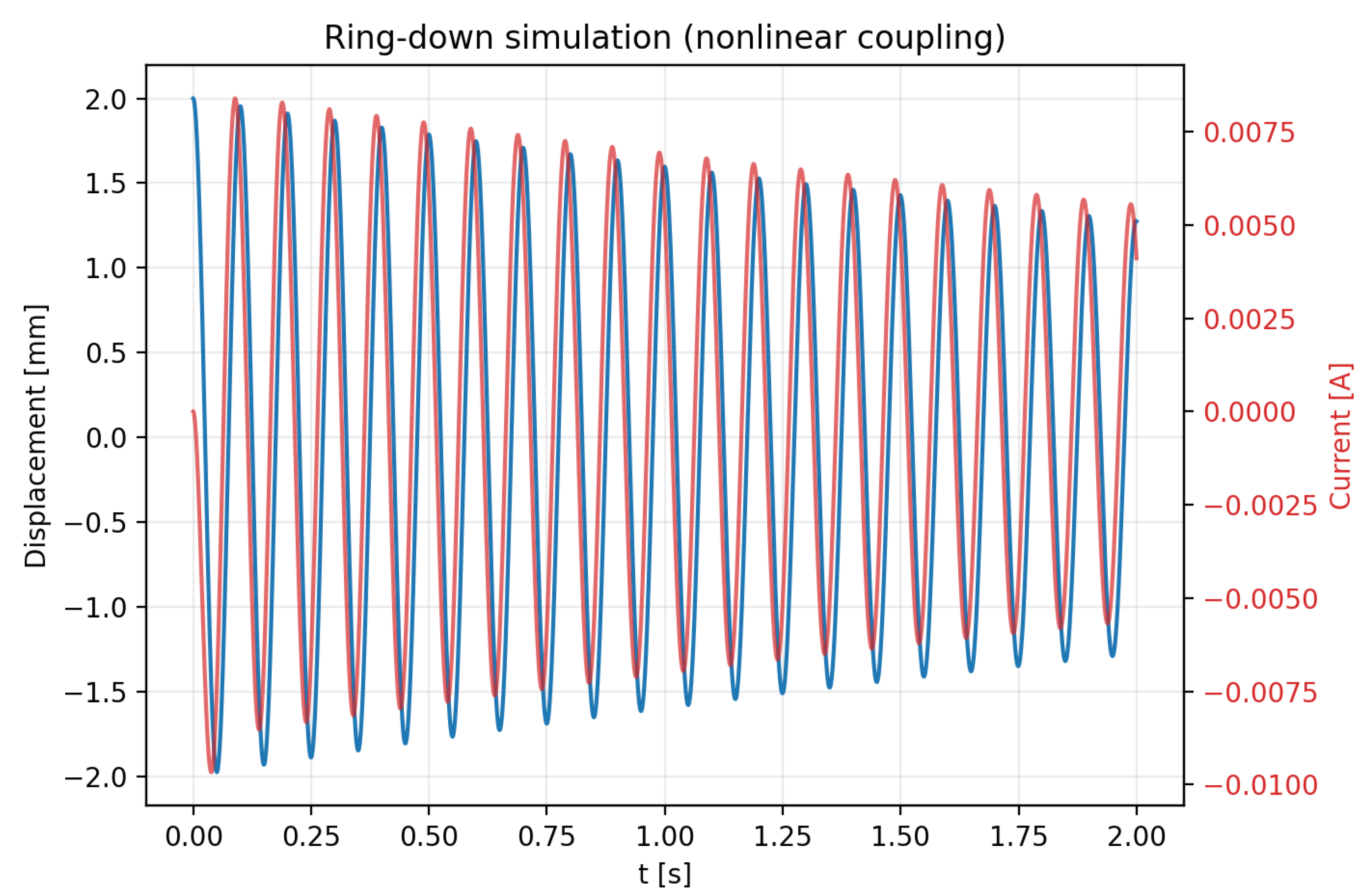
8.5. Time-Domain Ring-Down and Energy Balance
9. Discussion
9.1. Jerk and Absement as Asymptotes of a Passive Kernel
Equations show that jerk-like and absement-like terms arise as controlled asymptotic representations of a single passive electromagnetic memory element. Importantly, these terms are not independent constitutive laws; they are approximations of the exact constitutive behavior and should only be applied within their validity regimes ( vs ). For general excitations, the internal-state form provides a well-posed and bounded description.
9.2. Connection to Superconducting Systems
The same mathematical structure applies to superconducting loops when R is interpreted as an effective loss mechanism (e.g. flux creep, vortex-motion resistance) and L includes kinetic inductance [8]. In the ideal limit (perfect flux conservation), and the back-action approaches a purely conservative stiffness with persistent currents.
9.3. Limitations and Extensions
The dipole approximation neglects finite-size effects and multipole contributions at small separations. The lumped description is a minimal model; extended conductors generally exhibit multiple eddy-current modes and therefore a sum of exponentials (distributed relaxation times) rather than a single [3,4]. Nonetheless, the present two-parameter form is a useful reduced-order element and provides a clear route to identification via .
9.3.0.8. Remark (“critical ratio” and a symmetry analogy).
The appearance of the value is a consequence of a balance between the small-t growth and the large-t decay , yielding a single interior critical point of . This “central” value is, in a purely formal sense, reminiscent of the role played by as the symmetry axis (fixed line) of the involution in the functional equation of the completed Riemann zeta function. No deeper connection is implied.
10. Conclusions
We derived a minimal, energy-consistent state–space model for a moving magnetic dipole coupled to a conducting (or superconducting) loop. Linearization yields an exact complex dynamic stiffness depending only on and a stiffness scale . We showed that this electromagnetic back-action is equivalent to a mechanical Maxwell element and provided closed-form expressions for added stiffness, added damping, and direct identification formulas for . The dipole–loop geometry further yields a simple analytic design rule: the coupling gradient (and thus back-action strength) is maximized at . Finally, jerk-like and absement-like force terms were obtained as controlled low- and high-frequency asymptotes of the same passive memory kernel, clarifying their physical meaning and limitations. Reproducible Python simulations validate the theory and provide ready-to-use plots and datasets.
Appendix A. Python Code (Reproducibility)
The accompanying script magnet_loop_backaction.py generates all figures and CSV data used in this manuscript (see the data_*.csv outputs). Run:
python magnet_loop_backaction.py --make-figs --outdir .
References
- Jackson, J. D. Classical Electrodynamics, 3rd ed.; Wiley, 1998. [Google Scholar]
- Griffiths, D. J. Introduction to Electrodynamics, 4th ed.; Pearson, 2012. [Google Scholar]
- Reitz, J. R. Forces on moving magnets due to eddy currents. Journal of Applied Physics 1970, 41, 2067–2071. [Google Scholar] [CrossRef]
- Saslow, W. M. Maxwell’s theory of eddy currents in a conducting cylinder. American Journal of Physics 1992, 60, 693–711. [Google Scholar] [CrossRef]
- Grover, F. W. Inductance Calculations: Working Formulas and Tables; Dover, 1946. [Google Scholar]
- R. S. Lakes, Viscoelastic Materials; Cambridge University Press, 2009.
- Landau, L. D.; Lifshitz, E. M.; Pitaevskii, L. P. Electrodynamics of Continuous Media, 2nd ed.; Butterworth–Heinemann, 1984. [Google Scholar]
- Tinkham, M. Introduction to Superconductivity, 2nd ed.; McGraw–Hill, 1996. [Google Scholar]
- Smythe, W. R. Static and Dynamic Electricity, 3rd ed.; McGraw–Hill, 1968. [Google Scholar]
- Kraus, J. D.; Fleisch, D. A. Electromagnetics with Applications, 5th ed.; McGraw–Hill, 1999. [Google Scholar]

Table 1.
Example parameters used for the reproducible simulations and key derived quantities.
| Symbol | Meaning | Value |
|---|---|---|
| m | dipole moment | A.m2 |
| a | loop radius | m |
| N | number of turns | 500 |
| L | loop inductance | 10 mH |
| R | loop resistance | |
| operating point | m | |
| M | mechanical mass | kg |
| mechanical resonance (uncoupled) | 10 Hz | |
| mechanical damping | N.s/m | |
| coupling gradient (Equation (5)) | Wb/m | |
| EM time constant | s | |
| corner frequency | Hz | |
| high-frequency stiffness scale | N/m | |
| low-frequency viscous scale | N.s/m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



