
Submitted:
26 January 2026
Posted:
27 January 2026
You are already at the latest version
Abstract
The structural design of unstiffened cylindrical shells under external hydrostatic pressure is critical forthe safety of marine structures, such as submarine hulls and pressure vessels. Accurately assessing nonlinear buckling and collapse failure modes traditionally requires computationally intensive Finite Element Analysis (FEA), which creates a bottleneck in iterative design optimization. To address this, our research leverages a robust Deep Neural Network (DNN) model developed in a preceding study. This predictive model was trained on a large‐scale dataset of 46,060 points generated through FEA simulations and rigorously validated against 28 physical experimental data points. Building upon this foundation, the present study implements a novel optimization framework that integrates the pre‐trained DNN as a high‐speed surrogate model with a Differential Evolution (DE) algorithm for global optimization. The primary objective is to minimize structural weight while strictly satisfying collapse strength requirements. Additionally, a grid search component is incorporated to provide designers with multiple feasible design candidates almost instantaneously. Validation against independent FEA results confirms high fidelity, with error rates of less than 2%. This methodology transforms the design cycle from days to mere minutes, establishing a reusable digital asset that significantly enhances efficiency and structural safety in marine engineering.
Keywords:
Deep Neural Network (DNN)
; Design optimization
; cylindrical structure
; collapse strength
; weight minimization
1. Introduction
Cylindrical shells are fundamental structural elements in a vast array of engineering applications, serving as critical components in submarine hulls, offshore platforms, aerospace vehicles, pipelines, and pressure vessels [1,2,3,4]. The structural integrity of these components, particularly when subjected to external hydrostatic pressure, is of paramount importance for operational safety and reliability. The primary failure mode under such loading conditions is structural instability, leading to buckling and catastrophic collapse, often at a pressure significantly lower than that predicted by simple material yield criteria [5]. Consequently, the accurate prediction and consideration of this complex, nonlinear behavior are central to the design process.
The evolution of design methodologies for cylindrical shells reflects a continuous search for greater accuracy and efficiency. Early design approaches were rooted in classical analytical theories, such as those developed by von Mises, Timoshenko, and others, which provided foundational insights into the buckling of perfect shells [6,7,8]. These theories formed the basis for design codes from organizations like ASME and DNV [9,10,11]. However, it was quickly recognized that real-world shells exhibit a profound sensitivity to initial geometric imperfections, which can reduce their actual collapse strength to a fraction of the theoretical value for a perfect cylinder [12,13]. This imperfection sensitivity has been a central theme in shell buckling research for decades, with numerous studies dedicated to quantifying its effects through both theoretical and experimental means [14,15,16,17]. To bridge the gap between theory and reality, extensive experimental programs have been conducted. These tests, performed on shells made from steel [18,19,20,21], aluminum alloys [22], and composite materials [23,24,25,26,27], have provided invaluable data for validating analytical models and understanding the physical collapse phenomena.
Complementing these physical tests, Finite Element Analysis (FEA) has become the de facto standard for the final design verification of critical structures [28,29,30]. However, despite its accuracy, the utility of FEA in the context of design optimization is severely limited by its high computational cost. An optimization workflow requires exploring a vast design space, which may involve thousands of structural analyses to identify an optimal set of parameters (e.g., length, diameter, thickness) that minimize weight while satisfying strength constraints [31,32]. Performing this exploration using direct, iterative FEA is often computationally prohibitive, creating a significant bottleneck in the design cycle [33,34]. This challenge has catalyzed research into more efficient alternatives, most notably surrogate modeling techniques. Methods such as response surface methods (RSM) and Kriging have been employed to approximate the complex input-output relationship of the FEA model, but they can face limitations with high-dimensional or highly nonlinear problems [35,36,37]. More recently, the application of machine learning (ML) and artificial intelligence (AI) has emerged as a powerful paradigm for overcoming these limitations [38]. Deep Neural Networks (DNNs), in particular, have demonstrated exceptional capability in learning complex, nonlinear functions directly from data. In structural mechanics, DNNs have been successfully used to predict buckling loads, perform stress analysis, and detect damage, often achieving near-instantaneous predictions after an initial training phase [39,40,41,42]. This predictive power makes them ideal candidates for use as high-fidelity surrogate models within an optimization framework.
Building upon a preceding study that successfully developed and validated a robust DNN model for collapse strength prediction [43], this work proposes and implements a novel and highly efficient design optimization framework that critically addresses the computational bottleneck of traditional FEA-based approaches. The primary objective is to solve a practical, yet computationally intensive, engineering problem: minimizing the structural weight of an unstiffened cylinder while rigorously satisfying a specified collapse strength requirement.
The distinctive contribution of this study lies in leveraging the pre-trained DNN as an exceptionally rapid and accurate surrogate function. This approach bridges a critical gap, applying a machine-learning optimization framework to implosion problems for the first time. It moves beyond simplified 'rule-based methods' by capturing complex nonlinearities and imperfection sensitivities, and it solves the computational bottleneck of iterative FEA. Crucially, the foundational DNN model was not only validated against FEA (R2 > 0.99) but also directly against the physical experimental data, ensuring its real-world applicability. This methodology, systematically detailed and validated in the following sections, aims to provide a practical and powerful tool for rapid and efficient optimal design, significantly enhancing structural safety and design efficiency of underwater pressure vessels and marine structural components. The overall approach is summarized in Figure 1. The core contribution of this work extends beyond solving a single optimization problem; it lies in the development of a reusable digital asset through a significant initial investment (i.e., large-scale FEA data generation and DNN training). Traditional FEA-based optimization necessitates a complete, time-consuming rerun of the entire process—often taking days or weeks—whenever design requirements, such as the design pressure, change. In contrast, once trained, the DNN model developed in this study can generate optimal design candidates for new requirements in mere seconds. This provides a decisive practical advantage, enabling designers to rapidly explore various scenarios in the preliminary design stage and efficiently respond to iterative changes, thereby dramatically shortening the entire development cycle.
2. Foundation of the DNN Surrogate Model
The efficacy of the proposed optimal design framework hinges on the reliability and efficiency of its core component: a pre-trained DNN model capable of accurately predicting the collapse strength of cylindrical shells. This section summarizes the development and validation of this foundational model, which was the focus of our research series [43].
2.1. FEA Data Generation and Validation
To guarantee the accuracy of the training data, the dataset was meticulously generated through an extensive parametric study utilizing a rigorously validated FEA methodology [43].
- Material Properties: The study focused on AL-6061 aluminum alloy cylinders. An elastic-plastic material model with isotropic hardening was defined based on material properties (elastic modulus, Poisson's ratio, yield strength) adopted from the source experimental studies.
- FEA Model and Mesh: 3D models were created in the commercial software Abaqus, meshed using 4-node, reduced integration shell elements (S4R), which are well-suited for large-strain, nonlinear buckling analysis. A comprehensive mesh convergence study was performed (see [43], Figure 2), establishing an optimal element size of 3t × 3t to balance accuracy and computational cost.
- Boundary Conditions: The boundary conditions were defined to simulate pressure acting on end caps: one end was fully clamped (all translational and rotational degrees of freedom arrested), and the other end was constrained in radial and rotational directions but was free to move in the axial direction.
- Imperfections: Initial geometric imperfections, which are critical to collapse strength, were modeled by applying the first buckling eigenmode shape as a pattern. The amplitude was systematically varied as a key input parameter, ranging from 0.1% to 0.5% of the cylinder's radius.
This systematic approach yielded a comprehensive dataset comprising 46,060 data points, each representing a unique cylinder configuration and its corresponding collapse behavior.
2.2. Validation of FEA and DNN Models
The reliability of the entire framework rests on validation against physical experiments.
- FEA Validation: The FEA methodology itself was first validated against six experimental test cases from existing literature. The numerical predictions showed excellent agreement with the experimental collapse strengths, with an average difference of 1.05 and a coefficient of variation (COV) of 5.02% ([43], Table 2). This confirmed the FEA's ability to accurately capture physical collapse behavior.
- DNN Architecture: The developed DNN model is a Multi-Layer Perceptron (MLP) that uses the direct physical parameters (and ) as input features to predict the collapse pressure (). Through an exhaustive hyperparameter search, the optimal architecture was determined to be a fully connected network with 3 hidden layers, each containing 128 neurons, using a ReLU activation function.
- DNN Validation: The trained DNN model was validated in two stages. First, it achieved remarkable predictive capabilities on a reserved test dataset (10% of the total data), demonstrating a mean absolute error (MAE) of 0.0183 MPa and an outstanding coefficient of determination (R2) of 0.9943. Second, DNN was used to predict the strength of the original six experimental models (which were not in the training data). The DNN predictions showed a mean ratio of 1.04 (COV 4.01%) against the experimental values ([43], Table 5), confirming its generalization capability to real-world scenarios.
This validated, high-performance DNN serves as the high-speed surrogate model that underpins the optimal design framework presented in the subsequent sections.
3. Methodology: DNN-Based Design and Optimization Framework
This chapter elaborates on the comprehensive methodology developed for the optimal design of unstiffened cylindrical shells under external pressure. The framework seamlessly integrates a rigorously validated DNN model with an advanced global optimization algorithm and a practical grid search approach. The overall flow of the proposed DNN-based design and optimization framework is depicted in Figure 2. This framework progresses through several key stages: initialization of design variables (); evaluation of structural strength using the pre-trained DNN; adherence to predefined design constraints; and an iterative cycle of generating, evaluating, and selecting candidate solutions to progressively converge towards the optimal design.
3.1. Design Problem Formulation
The primary objective of this study is to determine the optimal cylinder dimensions that minimize structural weight while strictly adhering to a specified minimum collapse strength requirement. The design problem is formally expressed as an optimization task:
Design Variables: The geometric parameters of the cylindrical shell are the variables to be optimized: L, D, and t. These variables are bounded within predefined practical and physically meaningful ranges, consistent with the DNN training data.
Initial Imperfection () Handling: Unlike the geometric variables, the initial imperfection is not treated as an independent optimization variable. Instead, it is defined as a fixed percentage of the cylinder's diameter, a common practice in engineering design to account for manufacturing tolerances. The designer specifies this percentage (e.g., 0.1%, 0.2%, 0.5%) for a given optimization run or candidate search.
Objective Function: Assuming constant material density and neglecting end closures, the structural weight is directly proportional to the shell's volume. Therefore, the objective is to minimize a proxy for weight, which is the product of the design variables:
This function seeks to find the combination of length, diameter, and thickness that results in the smallest volume.
Constraints: The design must satisfy the following critical constraints.
- -
- Strength Constraint: The collapse pressure predicted by the DNN model for the given dimensions and imperfection must be greater than or equal to the specified minimum required design pressure . This is expressed as:
Here, is the output of the pre-trained DNN model, which rapidly evaluates the strength for any given set of input parameters.
- -
- Other Design Constraints: Additional geometric constraints, such as limits on L/D or D/t ratios, can be incorporated based on specific design codes or manufacturing considerations.
3.2. Integration of DNN Model into Optimization: The Surrogate Advantage
The seamless integration of the pre-trained DNN model is the cornerstone of this framework's efficiency. Traditionally, evaluating the strength constraint () for each design iteration within an optimization loop would necessitate computationally expensive Finite Element Analysis (FEA) simulations, which can take minutes to hours per run. This iterative nature makes direct FEA-based optimization computationally prohibitive, potentially extending design cycles to days or even weeks.
In stark contrast, the DNN model serves as a high-fidelity, high-speed surrogate model. For any given set of design variables () and the defined imperfection, the DNN can predict the collapse pressure in mere milliseconds. This drastic reduction in evaluation time is critical. Since the DNN effectively acts as a "black-box" function, learning complex non-linear relationships from data without requiring explicit mathematical formulations, it is ideally suited for integration with optimization algorithms that do not rely on gradient information. This integration fundamentally transforms the design problem from a computationally bottlenecked task into one that can be solved within minutes to a few hours on standard computing hardware, significantly accelerating the entire design cycle.
3.3. Global Optimization Algorithm: Differential Evolution (DE)
To effectively navigate the complex, nonlinear, and potentially multi-modal design space characteristic of structural optimization problems involving buckling and collapse, a robust global optimization algorithm is essential. Differential Evolution (DE) was chosen for this task due to its proven ability to locate global optima efficiently and its inherent robustness when optimizing black-box functions. Unlike gradient-based methods that can get trapped in local optima or require derivative information, DE is a population-based evolutionary algorithm that operates without explicit gradient calculations, making it perfectly suited for problems where the objective or constraint functions, such as our DNN model, are implicitly defined.
The DE algorithm operates by maintaining and evolving a population of candidate solutions. In each iteration, known as a generation, new candidate solutions are strategically generated by perturbing existing ones, then evaluated against the objective function and constraints.
Initialization: The optimization begins by randomly generating an initial population of design variable sets () within their predefined practical bounds. This ensures a broad initial exploration of the design space.
Iteration Loop: For each generation, the following steps are performed for every solution in the current population:
- -
- Initialization: New "trial solutions" are created. The mutation process perturbs existing solutions by combining the weighted difference of randomly chosen vectors. This mutated vector is then combined with the original "parent" solution through a crossover operation, producing a trial candidate. This two-step process helps explore new regions of the search space.
- -
- Evaluation: Each trial solution's performance is evaluated. This critical step involves feeding the trial design variables () into the pre-trained DNN model to predict its collapse pressure . Concurrently, the objective function (weight proxy ) is calculated, and the strength constraint () is checked.
- -
- Selection: The trial solution replaces its corresponding parent solution in the population only if it satisfies all design constraints and yields a better objective function value (i.e., lower weight). This greedy selection process iteratively guides the population towards optimal regions of the design space.
Termination: The iterative loop continues until a predefined maximum number of iterations is reached or the population's solutions converge within a specified tolerance, indicating that an optimal or near-optimal solution has been found.
3.4. Grid Search Based Design Candidate Generation
While global optimization effectively identifies a single optimal design, engineers often benefit from a diverse set of feasible design candidates, particularly during the preliminary design phase. To address this, a targeted grid search approach is implemented, allowing for efficient exploration of the design space around an initial design point.
The purpose of this component is to systematically explore a discrete neighborhood around a given initial design () and identify multiple feasible designs that satisfy the required strength constraint, subsequently sorting them by weight.
Search Space Definition: For L and D, a range of values is generated by stepping in 10 mm intervals symmetrically around and within specified search intervals. Similarly, for t, values are generated in 0.5 mm intervals symmetrically around . This creates a comprehensive grid of discrete design combinations.
Evaluation and Filtering: For every discrete combination of () within the defined grid. The DNN model is then used to predict the collapse strength for this () combination. Only those combinations that satisfy are considered feasible candidates.
Candidate Ranking: The identified feasible candidates are then meticulously sorted in ascending order based on their calculated weight proxy (). The framework then returns the top three candidates from this sorted list, providing the designer with a set of practical, weight-optimized alternatives that offer flexibility for further consideration of other non-optimized design factors. This capability significantly streamlines the preliminary design phase by offering multiple viable options almost instantaneously.
4. Results and Discussion
This chapter presents the results obtained from applying the DNN-based optimal design framework to unstiffened cylindrical shells under external pressure. The discussion will cover the characteristics of the optimal designs derived from global optimization, the utility of the generated design candidates through grid search, and a quantitative analysis of the computational efficiency achieved by leveraging the DNN model. The aim is to rigorously demonstrate the superiority and practical applicability of the proposed framework.
4.1. Global Optimization Results
The DE algorithm was employed to find the minimum-weight design for various specified required design collapse pressures () and initial imperfection (). For a hypothetical = 10 MPa and = 0.2%, the optimization yielded the following optimal design as shown in Table 1. The results demonstrate that the optimization successfully identified a design that minimizes the weight proxy while satisfying the required collapse strength with a small margin.
The results demonstrate that the optimization successfully identified a design that minimizes the weight proxy while satisfying the required collapse strength with a small margin. The calculated value, derived from the optimized diameter, is also presented.
Figure 3 illustrates the convergence behavior during the optimization process for the case study detailed in Table 2. Figure 3(a) shows the evolution of the objective function (weight proxy), which rapidly converges towards the optimal value. Concurrently, Figure 3(b) displays the evolution of the design variables as the optimization algorithm iterates. It can be observed that these design variables also stabilize, indicating the algorithm's progression towards an optimal design solution that satisfies the predefined constraints.
- Discussion on Optimal Design Characteristics:
Analysis of the optimal designs across different and values reveals trends in optimal and ratios. For instance, higher required pressures generally lead to thicker shells (increased ) or smaller diameters () to maintain stability. The interplay between , , and to achieve minimum weight is complex and often non-intuitive, highlighting the advantage of optimization algorithms. The fixed imperfection percentage influences the overall strength, pushing the optimizer towards more robust (and potentially heavier) designs for higher imperfection levels.
4.2. Grid Search Based Design Candidate Analysis
The grid search functionality provides designers with a practical means to efficiently explore feasible design alternatives around a given starting point, considering a fixed imperfection percentage. This offers valuable flexibility beyond a single optimal point.
For an initial design point of = 500 mm, = 200 mm, = 5 mm, = 0.2%, and a = 10 MPa, the top 3 minimum-weight candidates identified through grid search are presented in Table 2. It is noted that the initial design itself did not satisfy the strength requirement.
Figure 4 visually demonstrates the design space explored through grid search under the conditions of an initial design point ( = 500 mm, = 200 mm, = 5 mm, = 0.2% ) and a required design pressure ( = 10 MPa). Each point plotted based on the ratio and thickness , represents a single design candidate, and its color signifies the weight proxy () of that design. The top three candidate groups presented in Table 3 are highlighted in this figure.
The grid search effectively identifies a cluster of feasible designs that satisfy the strength requirement. Designers can review these candidates to consider other factors not directly included in the optimization objective (e.g., specific manufacturing constraints, preferred dimensions, or a slightly heavier but more robust design). This provides valuable flexibility beyond a single optimal point. The ability to quickly generate such candidates significantly streamlines the preliminary design phase.
4.3. FEM Validation of Optimal Designs
A critical step in establishing the reliability of the DNN-based optimal design framework is performing independent Finite Element Analysis (FEA) on the derived optimal and candidate designs. This process verifies the accuracy of the DNN's predictions, particularly as optimization algorithms may explore regions near the boundaries of the DNN's training data.
For instance, an FEA simulation conducted on the optimal design from Case 1 (Table 1) predicted a collapse strength of 10.12 MPa. This result exhibits a minimal error of 0.7% when compared to the DNN's prediction of 10.05 MPa. Such a high degree of agreement between the DNN prediction and FEA validation strongly underscores the reliability of the proposed DNN-based optimization framework.
Further FEA validations were performed on other optimal candidate designs derived from the grid search to broaden the scope of verification. As presented in Table 3, a comparison between the DNN-predicted collapse strengths and the FEA results for the top two candidates from Table 2 revealed error rates of approximately 2%. This further confirms the high reliability and general applicability of the DNN model across various feasible design points.
Figure 5 illustrates the collapse shapes of selected optimal design candidates as obtained through FEA. Moreover, their corresponding pressure-displacement curves, depicted in Figure 6, further demonstrate excellent agreement with the DNN predictions, providing strong visual confirmation of the framework's accuracy and applicability.
It is noted in Table 3 that the DNN prediction is slightly higher than the FEA validation result. This non-conservative error, while small, is a critical consideration for engineering application. This discrepancy is within the 5.02% COV observed between the "ground truth" experimental data and the FEA model itself (see Section 2.2), suggesting it is within the model's expected error margin. However, to ensure a robust and safe design, we recommend applying a knock-down factor () to the optimization constraint (Equation 2) for practical implementation. The constraint would thus be modified to:
This adjustment formally accounts for the model's error margin and guarantees a conservative design.
4.4. Computational Efficiency Analysis
The most significant and transformative advantage of the DNN-based framework is its unparalleled computational efficiency when compared to traditional FEA-based design approaches. This efficiency drastically accelerates the design cycle, allowing for more comprehensive exploration and iteration.
FEA vs. DNN Prediction Time: A single FEA simulation for collapse analysis of a cylindrical shell can typically take minutes to hours (e.g., 30 minutes to 2 hours) depending on mesh density, structural complexity, and computational hardware. In stark contrast, a single prediction from the trained DNN model takes only a few milliseconds (e.g., < 50 ms) on standard computing hardware. This represents a speed-up factor of several orders of magnitude.
Total Optimization Time: An FEA-based optimization, necessitating hundreds or thousands of iterative FEA runs to converge to an optimal solution, could realistically take days or even weeks (e.g., 5 days to 3 weeks). The DNN-based global optimization, however, can converge to an optimal solution within minutes to a few hours (e.g., 10 minutes to 3 hours), even for complex problems with numerous iterations. Similarly, generating hundreds of grid search candidates, each requiring a strength evaluation, takes only seconds with DNN.
This drastic reduction in computation time is not merely a convenience; it is a critical enabler. It allows engineers to perform significantly more extensive design explorations, conduct detailed sensitivity analyses across a wider parameter space, and rapidly iterate on multiple design concepts. This capability directly leads to the identification of more robust, weight-optimized, and safer designs in a substantially shorter timeframe, significantly enhancing overall design efficiency and fostering innovation.
5. Limitation and Future Work
While this framework provides significant advancement, the authors acknowledge several limitations, which also guide future research.
- Material Specificity: The current DNN model is specific to the AL-6061 material used in the training data, as material properties were not explicit input features. The results are therefore material dependent. Future work should expand the dataset to include various common marine materials (different grades of steel, composites) by adding material properties as inputs to the DNN
- Scope of Geometry and Loading: The model is validated only for unstiffened cylinders within the trained geometric ratios () and under uniform hydrostatic pressure. Extending this methodology to stiffened cylinders or different loading conditions (e.g., axial compression, bending) is a critical next step.
- Boundary Conditions: The FEA simulations employed standardized clamped/axially-free boundary conditions. These are simplifications and may introduce boundary effects (visible in Figure 5) that differ from complex real-world end connections. Future sensitivity studies should investigate the influence of different boundary conditions.
- Failure Mode Transition: Although the FEA model was elastic-plastic, this study focused on instability-driven collapse. For thicker shells or different materials, failure can transition to a material-driven (plasticity) collapse. Analyzing this transition boundary was outside the current scope but is a valuable area for future investigation.
- Integration with Regulatory Codes: The optimization framework is a general tool. For practical application, the design pressure () and required safety factors must be derived from relevant regulatory codes, which was not part of this study.
6. Conclusions
This study successfully demonstrated a highly efficient framework for the minimum-weight optimal design of unstiffened cylindrical shells, leveraging a pre-trained DNN model as a high-speed, high-fidelity surrogate for FEA. The methodology, incorporating a robust global optimization algorithm (DE) and a practical grid search tool, was proven to be both accurate and computationally transformative. Optimal designs derived from the framework were rigorously validated via independent FEA, showing excellent agreement with prediction errors of less than 3%, confirming the framework's fidelity for critical design applications.
The most significant contribution lies in its unparalleled computational efficiency. By reducing optimization times from potential weeks to mere hours, this framework acts as a powerful and reusable digital asset. It enables extensive, rapid design exploration that is fundamentally unfeasible with traditional, slow iterative FEA or overly simplified rule-based methods. Crucially, the reliability and practical applicability of the DNN-based optimal designs were rigorously validated through independent FEA simulations. These validations consistently demonstrated high accuracy, with minimal discrepancies between DNN predictions and FEA results (e.g., errors of less than 2%). This high degree of agreement unequivocally confirms the framework's fidelity and trustworthiness in critical structural design applications.
Future research will focus on several key aspects. The framework will be extended to more complex geometries, such as stiffened cylinders, which are common in marine structures. Further work will also explore multi-objective optimization (e.g., minimizing weight while maximizing stiffness) and the integration of uncertainty quantification. Finally, investigating the performance of the model with smaller datasets and exploring more advanced neural network architectures (e.g., GNNs) could provide further insights into the efficiency and applicability of machine learning in structural engineering.
Author Contributions
S.-H.P. and S.-J.P.; methodology, S.-H.P. and S.-J.P.; software, S.-H.P. and S.-J.P.; validation, S.-H.P. and S.-J.P.; formal analysis, S.-H.P. and S.-J.P.; investigation, S.-H.P. and S.-J.P.; resources, S.-H.P. and S.-J.P.; data curation, S.-H.P. and S.-J.P.; writing—original draft preparation, S.-H.P. and S.-J.P.; writing—review and editing, S.-H.P. and S.-J.P.; visualization, S.-H.P. and S.-J.P.; supervision, S.-J.P.; project administration, S.-J.P.; funding acquisition, S.-J.P. All authors have read and agreed to the published version of the manuscript.
Funding
This research was supported by Korea Institute of Marine Science & Technology Promotion(KIMST) funded by the Ministry of Oceans and Fisheries, Korea(RS-2024-00420405).
Informed Consent Statement
Not applicable.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Calladine, C.R. The theory of shell structures Aims and methods. Int. J. Mech. Sci. 1982, 24, 219–230. [Google Scholar] [CrossRef]
- Teng, J.G.; Rotter, J.M. Buckling of Thin Metal Shells; CRC Press: London, UK, 2006. [Google Scholar] [CrossRef]
- Bai, Y.; Bai, Q. Subsea Pipelines and Risers; Elsevier: Amsterdam, The Netherlands, 2005. [Google Scholar] [CrossRef]
- Musa, A.E.S.; Al-Ainieh, M.M.K.; Al-Osta, M.A. Buckling of circular cylindrical shells under external pressures - A critical review. J. Constr. Steel Res. 2025, 228, 109439. [Google Scholar] [CrossRef]
- Singer, J.; Arbocz, J.; Weller, T. Buckling Experiments: Experimental Methods in Buckling of Thin-Walled Structures; Wiley: New York, NY, USA, 2000. [Google Scholar] [CrossRef]
- Von Mises, R. The Critical External Pressure of Cylindrical Tubes under Uniform Radial and Axial Load; Windenburg, D.F., Ed.; U.S. Experimental Model Basin, Navy Yard: Washington, DC, USA, 1933. [Google Scholar] [CrossRef]
- Timoshenko, S. Theory of Elastic Stability; McGraw-Hill: New York, NY, USA, 1936. [Google Scholar]
- Zoelly, R. Ueber ein Knickungsproblem an der Kugelschale. Ph.D. Thesis, ETH Zürich, Zürich, Switzerland, 1915. [Google Scholar] [CrossRef]
- ASME, ASME BPVC. Boiler and Pressure Vessel Code; American Society of Mechanical Engineers: New York, NY, USA, 2021. [Google Scholar]
- Det Norske Veritas. Buckling Strength of Shells: Recommended Practice; Tech. Rep. DNV-RP-C202; DNV: Høvik, Norway, 2019. [Google Scholar]
- ECCS. European Recommendations for Steel Construction; European Convention for Constructional Steelwork (ECCS): Brussels, Belgium, 1978. [Google Scholar]
- Budiansky, B. Theory of Buckling and Post-Buckling Behavior of Elastic Structures. Adv. Appl. Mech. 1974, 14, 1–65. [Google Scholar] [CrossRef]
- Árbocz, J.; Babcock, C.D. The Effect of General Imperfections on the Buckling of Cylindrical Shells. J. Appl. Mech. 1969, 36, 28–38. [Google Scholar] [CrossRef]
- Schenk, C.A.; Schuëller, G.I. Buckling analysis of cylindrical shells with random geometric imperfections. Int. J. Non Linear Mech. 2003, 38, 1119–1132. [Google Scholar] [CrossRef]
- Yamaki, N.; Simitses, G.J. Elastic Stability of Circular Cylindrical Shells. J. Appl. Mech. 1985, 52, 501–502. [Google Scholar] [CrossRef]
- Hilburger, M.W.; Starnes, J.H. Effects of imperfections of the buckling response of composite shells. Thin-Walled Struct. 2004, 42, 369–397. [Google Scholar] [CrossRef]
- Castro, S.G.P.; Zimmermann, R.; Arbelo, M.A.; Khakimova, R.; Hilburger, M.W.; Degenhardt, R. Geometric imperfections and lower-bound methods used to calculate knock-down factors for axially compressed composite cylindrical shells. Thin-Walled Struct. 2014, 74, 118–132. [Google Scholar] [CrossRef]
- Kyriakides, S.; Youn, S.K. On the collapse of circular confined rings under external pressure. Int. J. Solids Struct. 1984, 20, 699–713. [Google Scholar] [CrossRef]
- Zhang, J.; Hu, H.; Wang, F.; Li, Y.; Tang, W. Buckling of externally pressurized torispheres with uniform and stepwise thickness. Thin-Walled Struct. 2022, 173, 109045. [Google Scholar] [CrossRef]
- Błachut, J. Buckling of externally pressurized steel toriconical shells. Int. J. Press. Vessels Pip. 2016, 144, 25–34. [Google Scholar] [CrossRef]
- Zuo, X.; Zhang, J.; Tang, W.; Li, Y.; Li, H. Buckling behavior of steel and steel–composite cylinders under external pressure. Thin-Walled Struct. 2022, 181, 110011. [Google Scholar] [CrossRef]
- Miller, C.D. Buckling of axially compressed cylinders. ASCE J. Struct. Div. 1977, 103, 695–721. [Google Scholar] [CrossRef]
- Carvelli, V.; Panzeri, N.; Poggi, C. Effects of Material Failure on Buckling Behaviour of Medium-Thick GFRP Cylindrical Shells for Submarine Applications. In Proceedings of the ASME 2001 International Mechanical Engineering Congress and Exposition, New York, NY, USA, 11–16 November 2001; Volume AMD-248, pp. 81–94. [Google Scholar] [CrossRef]
- Rafiee, R.; Habibagahi, M.R. Evaluating mechanical performance of GFRP pipes subjected to transverse loading. Thin-Walled Struct. 2018, 131, 347–359. [Google Scholar] [CrossRef]
- Betts, D.; Sadeghian, P.; Fam, A. Experimental and analytical investigations of the flexural behavior of hollow ±55° filament wound GFRP tubes. Thin-Walled Struct. 2021, 159, 107246. [Google Scholar] [CrossRef]
- Li, Z.; Zhang, X.; Shen, K.; Liu, J.; Zhang, J.; Pan, G. Experimental study on the buckling of composite cylinders with reinforced circular hole under hydrostatic pressure. Def. Technol. 2025, 44, 231–247. [Google Scholar] [CrossRef]
- Moon, C.J.; Kim, I.H.; Choi, B.H.; Kweon, J.H.; Choi, J.H. Buckling of filament-wound composite cylinders subjected to hydrostatic pressure for underwater vehicle applications. Compos. Struct. 2010, 92, 2241–2251. [Google Scholar] [CrossRef]
- Reijmers, J.J.; Kaminski, M.L.; Stapersma, D. Analytical formulations and comparison of collapse models for risk analysis of axisymmetrically imperfect ring-stiffened cylinders under hydrostatic pressure. Mar. Struct. 2022, 83, 103161. [Google Scholar] [CrossRef]
- Sridharan, S.; Alberts, J. Numerical modeling of buckling of ring-stiffened cylinders. AIAA J. 1997, 35, 187–195. [Google Scholar] [CrossRef]
- Boote, D.; Mascia, D.; Monti, M.; Rizzuto, E.; Tedeschi, R. Elastic instability of thin cylindrical shells: Numerical and experimental investigation. Ocean Eng. 1997, 24, 133–160. [Google Scholar] [CrossRef]
- Haftka, R.T.; Gürdal, Z. Elements of Structural Optimization; Kluwer Academic Publishers: Dordrecht, The Netherlands, 1992. [Google Scholar] [CrossRef]
- Christensen, P.W.; Klarbring, A. An Introduction to Structural Optimization; Springer: Dordrecht, The Netherlands, 2008. [Google Scholar] [CrossRef]
- Rikards, R.; Abramovich, H.; Auzins, J.; Korjakins, A.; Ozolinsh, O.; Kalnins, K.; Green, T. Surrogate models for optimum design of stiffened composite shells. Compos. Struct. 2004, 63, 243–251. [Google Scholar] [CrossRef]
- Miller, B.; Ziemiański, L. Optimizing composite shell with neural network surrogate models and genetic algorithms: Balancing efficiency and fidelity. Adv. Eng. Softw. 2024, 197, 103740. [Google Scholar] [CrossRef]
- Kim, K.; Park, S.-J. Analysis of shear buckling for sinusoidal corrugated web beam. Mech. Based Des. Struct. Mach 2022. [Google Scholar] [CrossRef]
- Myers, R.H.; Montgomery, D.C.; Anderson-Cook, C.M. Response Surface Methodology: Process and Product Optimization Using Designed Experiments, 4th ed.; John Wiley & Sons: Hoboken, NJ, USA, 2016. [Google Scholar]
- Jones, D.R.; Schonlau, M.; Welch, W.J. Efficient Global Optimization of Expensive Black-Box Functions. J. Glob. Optim. 1998, 13, 455–492. [Google Scholar] [CrossRef]
- Salehi, H.; Burgueño, R. Emerging artificial intelligence methods in structural engineering. Eng. Struct. 2018, 171, 170–189. [Google Scholar] [CrossRef]
- Waszczyszyn, Z.; Bartczak, M. Neural prediction of buckling loads of cylindrical shells with geometrical imperfections. Int. J. Non Linear Mech. 2002, 37, 763–775. [Google Scholar] [CrossRef]
- Liu, F.; Yang, J.; Weng, S.; Xuan, F.Z.; Gong, J.G. A machine learning method for buckling design of internally pressurized torispherical heads considering geometric imperfection. Thin-Walled Struct. 2023, 189, 110908. [Google Scholar] [CrossRef]
- Nie, Z.; Jiang, H.; Kara, L.B. Stress Field Prediction in Cantilevered Structures Using Convolutional Neural Networks. J. Comput. Inf. Sci. Eng. 2018, 20. [Google Scholar] [CrossRef]
- Sakaridis, E.; Karathanasopoulos, N.; Mohr, D. Machine-learning based prediction of crash response of tubular structures. Int. J. Impact Eng. 2022, 166, 104240. [Google Scholar] [CrossRef]
- Park, S.-H.; Park, B.; Kim, K.; Park, S.J. Deep neural network-based prediction of collapse strength of cylinder structures under hydrostatic pressures. Eng. Struct. 2025, 344, 121397. [Google Scholar] [CrossRef]
Figure 1.
Overall research flowchart of the DNN-based optimal design framework, encompassing FE data generation, DNN model training, and DNN-based design optimization.
Figure 1.
Overall research flowchart of the DNN-based optimal design framework, encompassing FE data generation, DNN model training, and DNN-based design optimization.
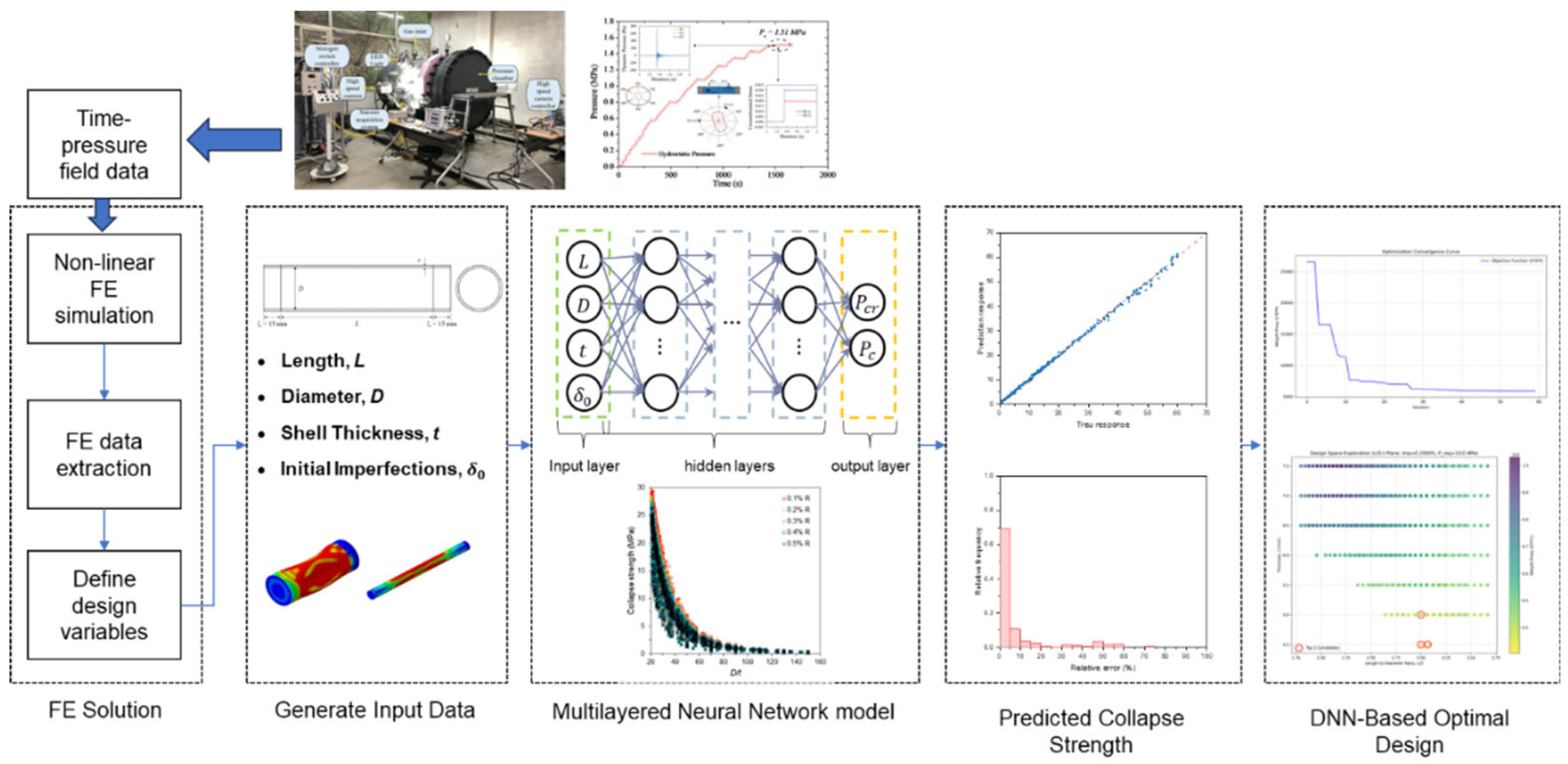
Figure 2.
Flowchart of the DNN-based design and optimization process, illustrating the iterative steps involving population initialization, strength evaluation using DNN, constraint checking, and candidate selection/update towards optimal dimensions.
Figure 2.
Flowchart of the DNN-based design and optimization process, illustrating the iterative steps involving population initialization, strength evaluation using DNN, constraint checking, and candidate selection/update towards optimal dimensions.
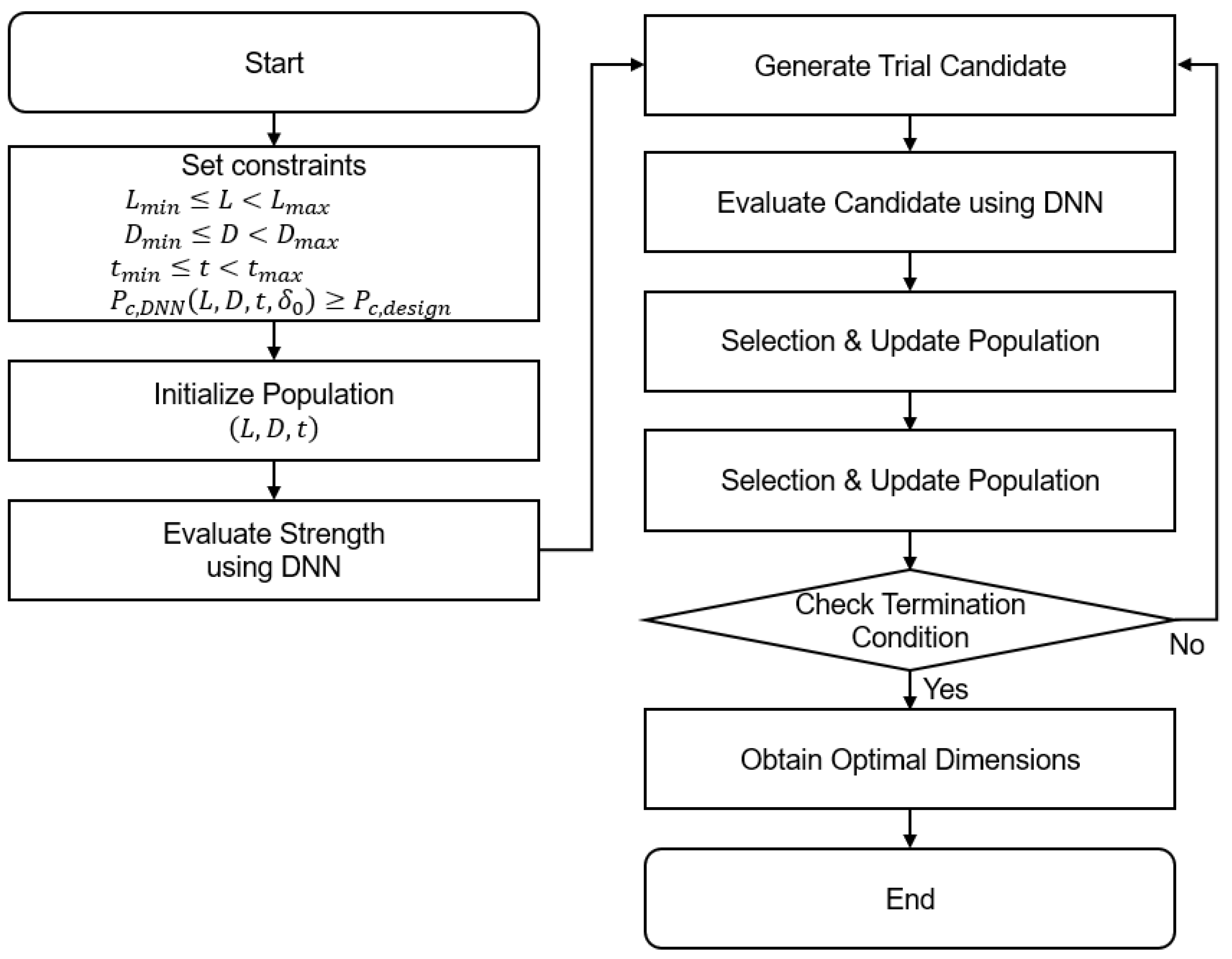
Figure 3.
Convergence characteristics during the DNN-based global optimization: (a) Evolution of the objective function (b) evolution of design variables over iterations for the case study.
Figure 3.
Convergence characteristics during the DNN-based global optimization: (a) Evolution of the objective function (b) evolution of design variables over iterations for the case study.
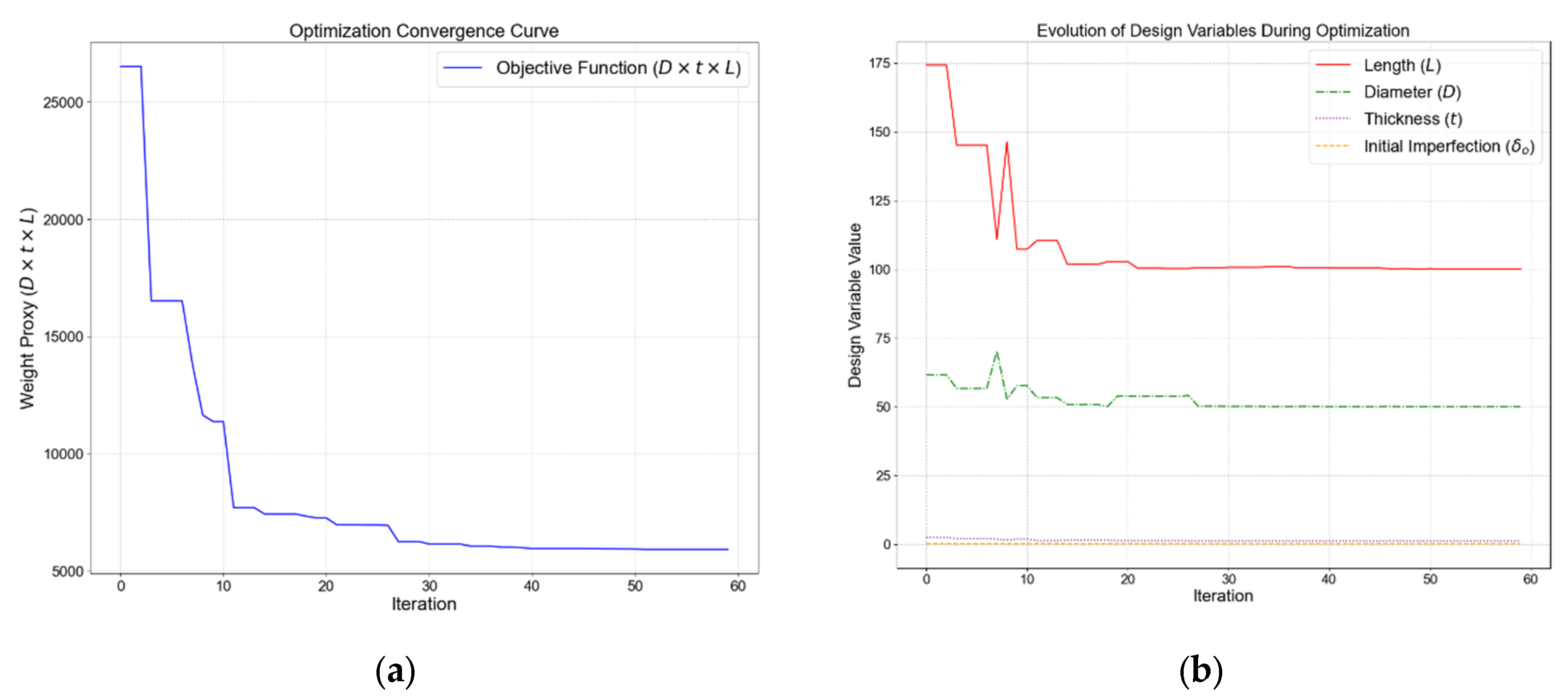
Figure 4.
Design space exploration in the plane obtained from grid search for an initial design and a required design pressure , highlighting the top three minimum-weight candidates.
Figure 4.
Design space exploration in the plane obtained from grid search for an initial design and a required design pressure , highlighting the top three minimum-weight candidates.
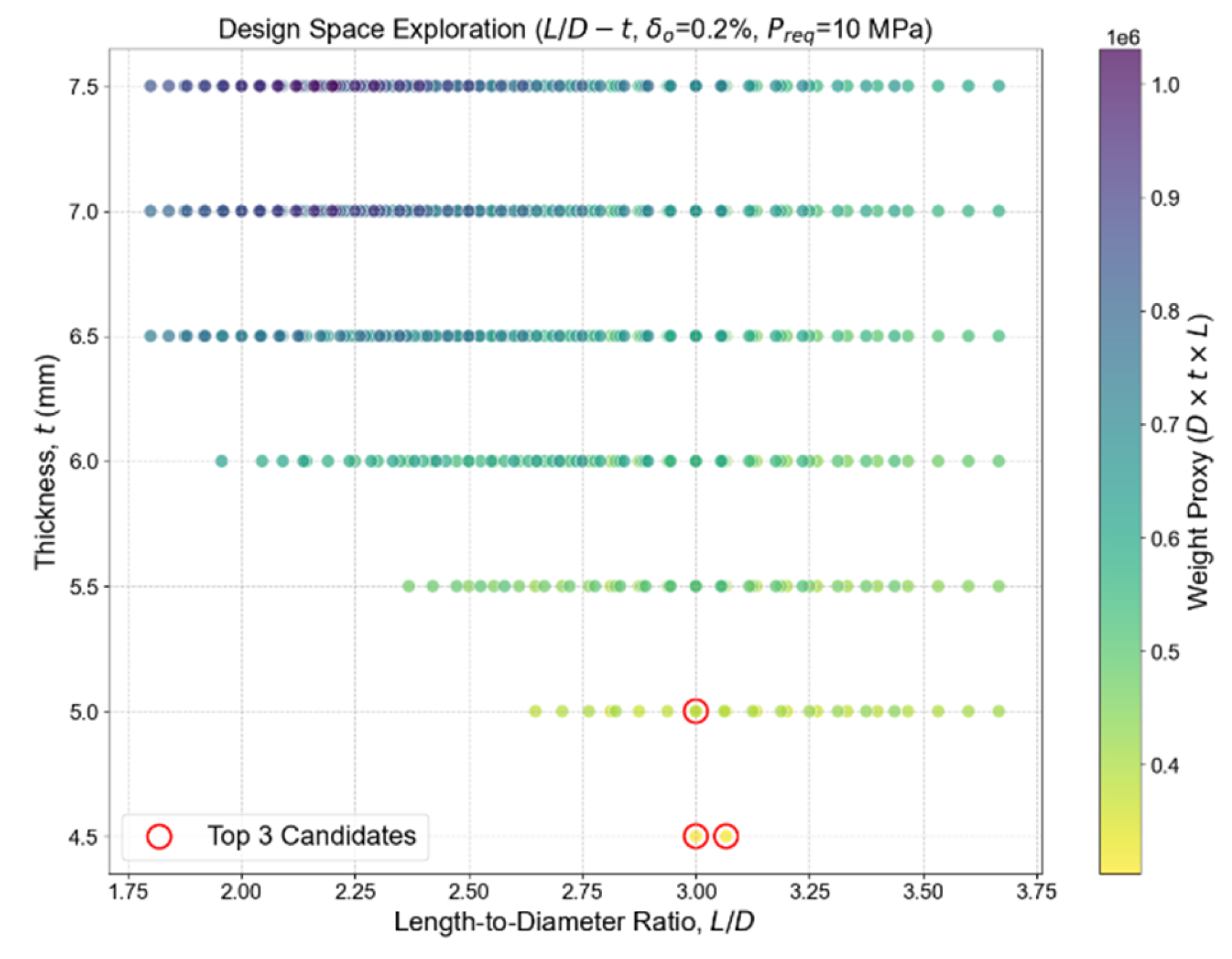
Figure 5.
FEM-obtained collapse shapes of selected optimal design candidates from grid search: (a) First ranked candidate model and (b) Second ranked candidate model.
Figure 5.
FEM-obtained collapse shapes of selected optimal design candidates from grid search: (a) First ranked candidate model and (b) Second ranked candidate model.
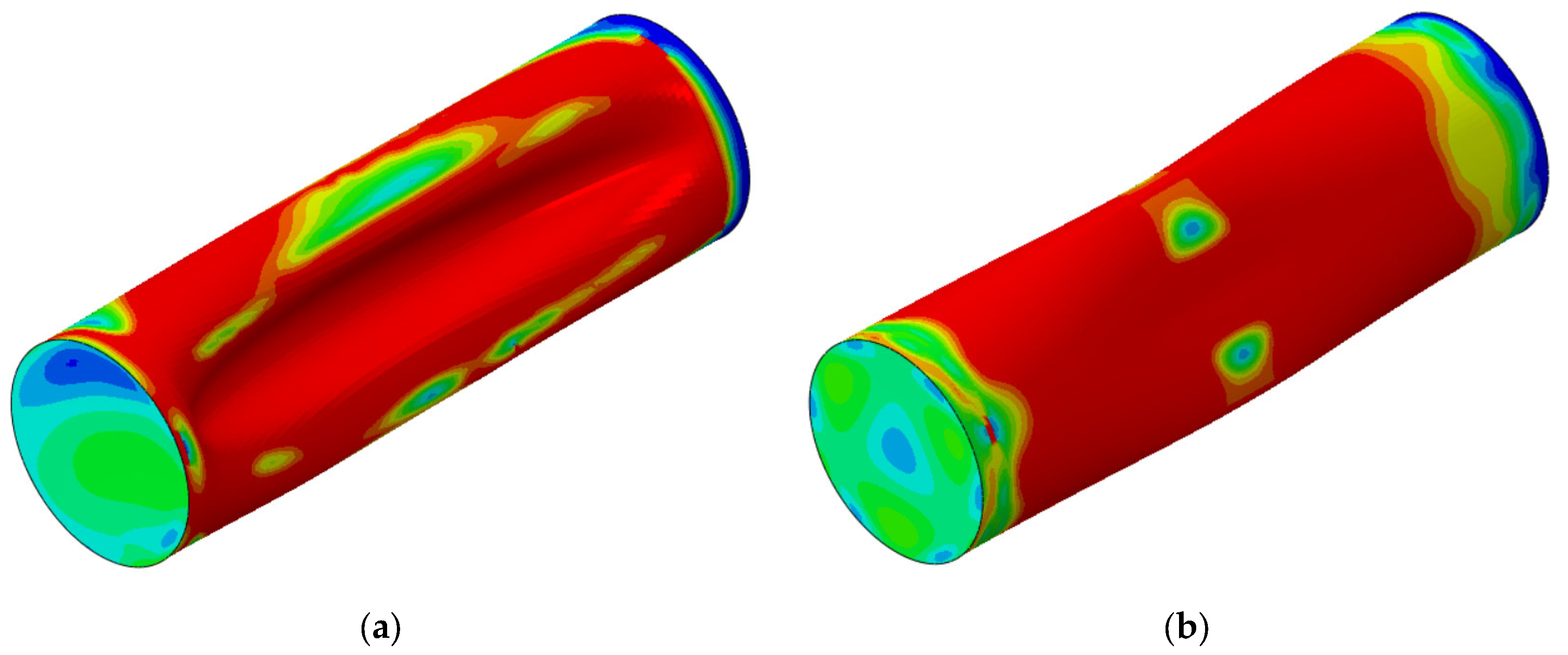
Figure 6.
Comparison of collapse pressure versus radial displacement curves between FEA results and DNN model predictions for two selected optimal candidate designs from grid search.
Figure 6.
Comparison of collapse pressure versus radial displacement curves between FEA results and DNN model predictions for two selected optimal candidate designs from grid search.
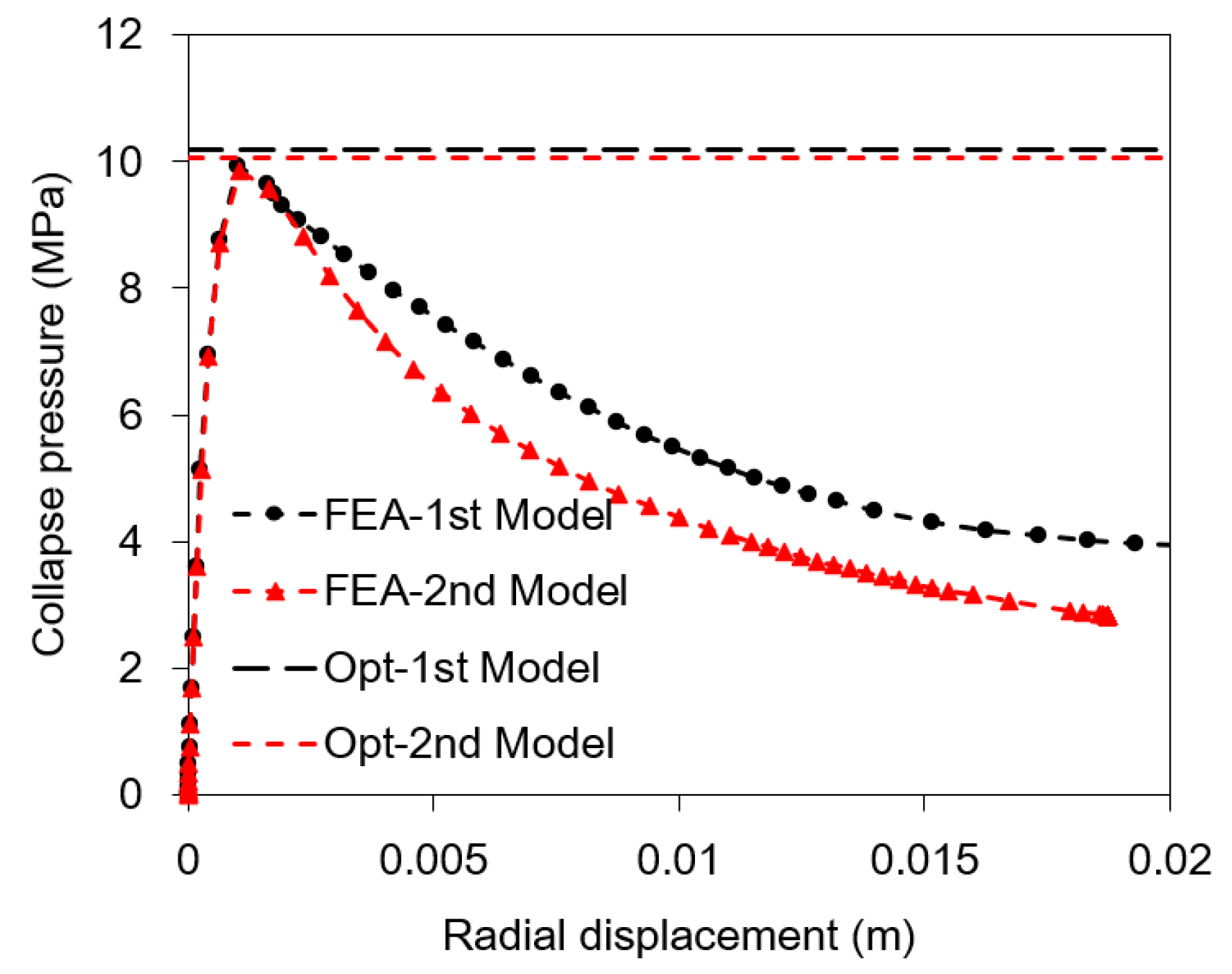

Table 1.
Optimal design results for a representative case study ( = 10 MPa, = 0.2%) obtained from the DNN-based global optimization.
Table 1.
Optimal design results for a representative case study ( = 10 MPa, = 0.2%) obtained from the DNN-based global optimization.
| Parameter | Optimal Value | Unit |
|---|---|---|
| Length | 523.45 | mm |
| Diameter | 215.12 | mm |
| Thickness | 3.87 | mm |
| Initial Imperfection | 0.4302 | mm |
| Weight Proxy () | 436,547 | mm3 |
| DNN Predicted Collapse Strength | 10.05 | MPa |
| DNN Predicted Buckling Strength | 12.18 | MPa |
Table 2.
Top 3 minimum-weight design candidates obtained from grid search for an initial design ( = 500 mm, = 200 mm, = 5 mm, = 0.2%, = 10 MPa).
Table 2.
Top 3 minimum-weight design candidates obtained from grid search for an initial design ( = 500 mm, = 200 mm, = 5 mm, = 0.2%, = 10 MPa).
| Rank |
(mm) |
(mm) |
(mm) |
(mm) |
Weight Proxy () |
DNN Collapse (MPa) | Note |
| Initial | 500.0 | 200.0 | 5.0 | 0.40 | 500,000 | 7.54 | Not satisfied with the |
| 1 | 450.0 | 150.0 | 4.5 | 0.30 | 303,750 | 10.18 | Satisfy |
| 2 | 460.0 | 150.0 | 4.5 | 0.30 | 310,500 | 10.07 | Satisfy |
| 3 | 450.0 | 150.0 | 5.0 | 0.30 | 337,500 | 12.78 | Satisfy |
Table 3.
Comparison of DNN-predicted and FEA-validated collapse pressures for top design candidates obtained from grid search.
Table 3.
Comparison of DNN-predicted and FEA-validated collapse pressures for top design candidates obtained from grid search.
| Design model | (mm) | (mm) | (mm) | (MPa) | (MPa) | Difference |
| 1st | 450.0 | 150.0 | 4.5 | 10.18 | 9.93 | 2.0% |
| 2nd | 460.0 | 150.0 | 4.5 | 10.07 | 9.86 | 2.1% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



