Submitted:
23 January 2026
Posted:
26 January 2026
You are already at the latest version
Abstract
In this paper, we examine the inherent mathematical and physical inconsistencies of strain gradient theories. It is shown that strain gradients are not proper measures of deformation, because their corresponding energetically conjugate stresses are non-physical and cannot represent the state of internal stresses in the continuum. Furthermore, the governing equations in these theories do not describe the equilibrium or motion of infinitesimal elements of matter properly. In first strain gradient theory (F-SGT), there are nine explicit governing equations of motion for infinitesimal elements of matter at each point; three force equations, and six unsubstantiated artificial moment equations that violate Newton’s third law of action and reaction. This shows that F-SGT is not an extension of rigid body mechanics, which then is not recovered in the absence of deformation. Moreover, F-SGT would require the existence of six additional fictitious symmetries of space-time according to Noether’s theorem, and a complete revision of the well-established concept of static indeterminacy in introductory mechanics. The inconsistencies of F-SGT also manifest themselves in the appearance of strains as boundary conditions.
Keywords:
strain gradient theory
; double-stress tensor
; Newton’s third law of action-reaction
; variational methods
; energy methods
; virtual work principle
1. Introduction
Mindlin and Tiersten [1] and Koiter [2] developed the initial version of size-dependent couple stress theory (MTK-CST), in which the deformation is completely specified by the continuous displacement field . This size-dependent continuum mechanics theory is based on the rigid body portion of motion of infinitesimal elements of matter at each point of the continuum [3,4,5]. Importantly, the internal stresses in this theory are the physically based force- and couple-stress tensors and , introduced by Voigt [6] and then later Cosserat and Cosserat [7], each having at most nine independent components.
However, MTK-CST suffers from some serious inconsistencies and difficulties with the underlying formulation [8,4]. Much earlier, for example, Eringen [9] realized the indeterminacy of the couple-stress tensor as a major mathematical problem in the original MTK-CST, which he afterwards called indeterminate couple stress theory. The main inconsistencies of MTK-CST have been resolved by discovering the subtle skew-symmetric character of the couple-stress tensor [3,10,11]. Therefore, in this size-dependent theory, called consistent couple stress theory (C-CST), the couple-stress tensor is fully determinate. Consequently, C-CST resolves the quest for a consistent size-dependent continuum mechanics by answering the criticism of Eringen and provides a fundamental basis for the development of size-dependent material response. Interestingly, in a recent paper Hadjesfandiari [11] shows that the difficulties in the original MTK-CST are fundamentally the result of an incomplete understanding of the concepts of moments and couples. Without resolving the inconsistencies of MTK-CST, research turned to other theories, such as strain gradient theory (Mindlin [12]; Mindlin and Eshel [13]).
In strain gradient theories (SGT), the state of internal stresses dramatically deviates from that defined in the Voigt, Cosserat and couple stress theories. The new higher stresses in strain gradient theories have no relation with the concept of the physical moment of forces in classical mechanics. For example, in first strain gradient theory (F-SGT) (Mindlin and Eshel [13]; Georgiadis et al. [14]; Aifantis and Willis [15]), the non-physical third order double-stress tensor with 27 components is different from the physical second order couple-stress tensor with nine components appearing in the Voigt, Cosserat and couple stress theories, and still makes the force-stress tensor symmetric. More surprisingly, there are nine explicit governing equations of motion for an infinitesimal element of matter in F-SGT; three force equations and six non-physical first symmetric moment equations. As a result, this theory uses an incorrect virtual work theorem or energy equation to generate non-physical principal momentum laws or equilibrium equations, which violate Newton’s third law of action and reaction. Furthermore, these additional moment equations are at odds with the very basic concepts of static determinacy and indeterminacy that provide a foundation for elementary engineering mechanics.
The remainder of the paper is organized as follows. In Section 2, we briefly examine the fundamental character of consistent continuum mechanics. This includes a concise presentation of C-CST by investigating the origin of the governing equations, and the form of stresses. This section helps to understand the missteps in the development of strain gradient and other higher gradient theories. Afterward, in Section 3, we present the currently used first strain gradient theory (F-SGT) and demonstrate different aspects of its inconsistencies. Finally, Section 4 contains a summary and some general conclusions.
2. Consistent Continuum Mechanics
Consistent size-dependent continuum mechanics [3,10] is the result of efforts of Voigt, the Cosserats and Mindlin (Voigt [6]; Cosserat and Cosserat [7]; Mindlin and Tiersten [1]) to account for the size effect in materials in a more complete continuum mechanics.
Consider a material continuum occupying a volume bounded by a surface . The deformation of the body is represented by the continuous displacement field . In infinitesimal deformation theory, the displacement vector field is sufficiently small that the infinitesimal strain and rotation tensors are defined as
Here standard indicial notation is used, and we have introduced parentheses to denote the symmetric part of a second order tensor, whereas square brackets are associated with the skew-symmetric part. Since the true (polar) rotation tensor is skew-symmetrical, one can introduce its corresponding dual pseudo (axial) rotation vector as
where represents the permutation or Levi-Civita symbol.
Consistent continuum mechanics is based on the rigid body portion of motion of infinitesimal elements of matter at each point of the continuum [3,4]. Therefore, the degrees of freedom are the displacements and rotations at each point, which describe, respectively, the translation and rotation of an infinitesimal element of matter about the point. However, the continuity of matter within a continuum description restrains the rotation field by the relation (3). This of course shows that the rotation field in the interior of is not independent of the displacement field . On the other hand, the tangential components of on the boundary are independent of the displacement components on the boundary . For the small deformation continuum mechanics theory, the velocity and acceleration fields are approximated by and , respectively.
2.1. Fundamental Governing Equations
The governing equations must describe the motion of infinitesimal elements of matter at each point. These fundamental governing equations are based on the force and moment equations for a system of particles [5,16]
where and are the total external forces and external moments exerted on the system, respectively, and is the time rate of change of linear momentum of each particle with mass and acceleration . We notice that the fundamental force and moment governing Equations (4) and (5) are the result of Newton’s second and third laws for the system of particles. Interestingly, these governing equations are also the consequence of application of linear and angular momentum principles for the system of particles. We also notice that the physical moment of a force at about the origin is the pseudo-vector , which is dual to the skew-symmetric moment true-tensor [5,16]. Interestingly, we have the dual relations
In terms of components, the physical moment vector and its dual skew-symmetric moment tensor can be written as
and
where
It is very important to note that the total internal forces and total moment of internal forces disappear in writing (5) based on Newton’s third law of action and reaction [5,16]. It should be emphasized that the governing Equations (5) is the only moment equation, in which the moment of internal forces vanish. In other words, it is only because of Newton’s third law of action and reaction that the moment of a force is defined in the form of the vector or its dual skew-symmetric tensor .
Now we review the fundamental character of a couple, which plays an important role in couple stress theory. A couple is a system of two parallel forces and , which have the same magnitude, but opposite direction (Figure 1). It turns out that the sum of the moment of forces about any arbitrary point is the same and is given by
where is the vector joining the position vectors and. The constant vector is the moment of the couple, which is perpendicular to the plane of the two forces. Note that the magnitude of this constant moment is , where is the perpendicular distance of the line of action of the forces, as shown in Figure 1.
The moment of a couple can also be represented by the dual skew-symmetric moment tensor
This form of a constant couple moment will be useful later in this paper.
It is very important to note that only the moment of a couple appears in the moment governing equation of equilibrium or motion (5). This means the effect of a couple in moment Equation (5) is only described by its constant moment without requiring the magnitude and line of action of constituent forces and . However, the couple moment vector by itself cannot completely describe the state of deformation and internal stresses in the continuum. This is because the vector does not uniquely specify the force system and . This important character of a couple has not been recognized in the development of the original couple stress theory (MTK-CST) (Hadjesfandiari [11]).
A concentrated couple with moment acting at point A can be considered as the limit of a system of parallel forces and when B approaches A, such that the moment vector remains constant, as displayed in Figure 2. This means the perpendicular distance approaches zero whereas (the magnitude of ) approaches infinity, such that
The concentrated pseudo-vector couple moment is usually attributed to the limiting point at A (Figure 3). However, it should be noted that
- The moment vector is not a real (true) vector exerting at the point A;
- It is only the forces and that are acting on the body, not the moment vector ;
- The couple moment vector by itself cannot completely describe the effect of a concentrated couple at A in a continuum.
The vector does not uniquely specify the force system and at point A. There are an infinite set of infinitely long parallel concentrated forces at point A with the same moment . This clearly shows that the deformation and state of stresses cannot be specified completely by the pseudo-vector moment of a concentrated couple acting at point A. This character is the source of indeterminacy and all other troubles in the original Mindlin-Tiersten-Koiter couple stress theory (MTK-CST) [11]. We note that the physical state of stress and deformation in the continuum is unique and determinate, which imposes some restrictions on the form of couple-stresses, and leads to consistent couple stress theory.
2.2. Consistent Couple Stress Theory
In couple stress theory (CST) (Mindlin and Tiersten [1]; Koiter [2]; Hadjesfandiari and Dargush [3,4,5]), the transfer of the interaction in the continuum through a surface element with unit normal vector occurs by means of a force vector and a couple with moment vector , where and are the force-traction vector and the moment of couple-traction vector, respectively. Therefore, in this couple stress theory, the stresses are represented by the second order true (polar) force-stress tensor and the second order pseudo (axial) couple-stress moment tensor , where
The fundamental governing equations in couple stress theory (CST) are based on the force and moment equations for system of particles (4) and (5) for an arbitrary part of the material continuum occupying a volume enclosed by boundary surface . The force and moment equations for this part of the body are
where is the specified body-force density and is the mass density. In terms of components, these equations become
By using the relations (13) and (14) for tractions, along with the divergence theorem, and noticing the arbitrariness of volume , we finally obtain the differential form of the governing equations of motion for an infinitesimal element of matter as
We note that the tractions and are energetically conjugate to the degrees of freedom and , respectively, where
We observe that since and are the degrees of freedom, the governing equations describing the translational and rotational motion of element of matter are the vectorial force and vectorial moment equations, where
Hadjesfandiari [11] has shown that the uniqueness and determinacy of the physical state of stress and deformation in the continuum imposes the skew-symmetric character of the couple-stress tensor, that is
Remarkably, this work also shows the mechanism of action of the moment couple-traction as a double layer of shear force-tractions, and the fundamental meaning of the skew-symmetric character of the couple-stress tensor .
Interestingly, the skew-symmetric character of the couple-stress tensor was first discovered by examining kinematics, well-posed boundary conditions, and the virtual work principle [3,4,10]. However, this method of proof did not reveal the internal structure of the couple-traction vector and couple-stress tensor.
The weak form or virtual work principle for this theory is obtained from the governing equations of motion (23) and (24) by using the degrees of freedoms and [3,5] as
Here is the skew-symmetric mean curvature tensor
which is the measure of deformation energetically conjugate to the skew-symmetric couple-stress tensor . It turns out that the skew-symmetric tensors and can be represented by their dual true couple-stress vector and true mean curvature vector [3], where
However, it is noted that in practice the engineering mean curvature vector defined as
is more suitable (Darrall et al. [17]). Therefore, the virtual work principle can be written as
This shows that the measures of deformation are the strain tensor and engineering mean curvature vector , where
Interestingly, the governing Equations (19) and (20) for an infinitesimal element of matter can be written as
The moment Equation (35) gives the skew-symmetric part of the force-stress tensor. Thus, for the total force-stress tensor, we have
As a result, the reduced force or linear governing equation becomes
Since this equation is a combination of the force and moment Equations (19) and (20), it cannot be considered as a fundamental law by itself. This can be confirmed by noticing that the highest derivative in the governing Equation (37) is of second order.
C-CST, as a consistent theory for continuum mechanics, can provide a suitable connection to atomistic models and the fundamental base for developing size-dependent multi-physics formulations, such as size-dependent piezoelectricity (i.e., flexoelectricity) and thermoelasticity (Hadjesfandiari [18,19]).
2.3. Discussion
By presenting consistent couple stress theory (C-CST), we notice the following fundamental concepts in developing consistent continuum mechanics:
1. This theory is based on the rigid body portion of motion of infinitesimal elements of matter at each point of the continuum.
2. The displacements and rotations are the degrees of freedom of the infinitesimal elements of matter at each point.
3. The force- and couple-stresses and in this theory are defined based on the concept of force and its physical moment pseudovector , respectively.
4. The governing Equations (34) and (35) describing the motion of infinitesimal elements of matter at each point are based on the force and physical moment Equations (4) and (5) for a system of particles, respectively.
5. The uniqueness and determinacy of the physical state of stress and deformation in the continuum imposes the skew-symmetric character of the couple-stress tensor ().
6. The form of force-stress tensor and couple-stress moment tensor (or couple-stress moment vector ) dictates the form of the measures of deformation strain tensor and mean curvature tensor (or engineering mean curvature vector ) in the corresponding weak form or virtual work principle.
7. The theory reduces to rigid body mechanics in the absence of deformation.
In consistent continuum mechanics, the form of physical stresses (concepts 3 and 5) in the corresponding weak form or virtual work principle (concept 6) dictates the form of the measures of deformation. This is the reason why this theory is called consistent couple stress theory (C-CST), rather than consistent mean curvature theory.
The development of the original couple stress theory (MTK-CST) correctly agrees with the first four required concepts. However, based on concept 5, there is some restriction on the form of the couple-stress tensor . The main reason for indeterminacy of the couple-stress tensor in MTK-CST is the fact that a system of couple forces and cannot be completely represented by its pseudo-vector moment . As a result, in the virtual work formulation for MTK-CST, the measure of deformation is the bend-twist tensor . However, the deviatoric bend-twist tensor with is not a proper measure of deformation, because it results in an indeterminacy in the spherical part of couple-stress tensor and an extra ill-posed boundary condition. These inconsistencies are very troublesome in three dimensional cases, especially those with torsional deformation, and thus cannot be simply ignored. Further details for the case of torsional vibration of a circular cylinder are provided in Hadjesfandiari and Dargush [20].
Initially, it was thought that without any physical loss in generality the indeterminate spherical part in MTK-CST may be taken equal to zero (Koiter [2]). However, neglecting the indeterminacy not only does not resolve the ill-posed boundary condition, but also makes couple-stress tensor deviatoric, that is . Nonetheless, a deviatoric couple-stress tensor is physically impossible. Based on physical grounds, if we can exert torsional couple-stresses , and on some element of the body, these three components must be independent of each other. However, this contradicts the mathematical deviatoric condition, . Perhaps, one may imagine that the hand of a supernatural power interferes with this simple physical experiment to make at each point of the continuum. Enforcing this condition would be analogous to enforcing the mathematical constraint on the force-stress tensor in a classical theory. Surprisingly, in MTK-CST with deviatoric couple-stresses, a uniaxial torsional deformation with a distribution of a uniform normal couple-stress component, e.g. , becomes impossible, which contradicts common sense.
By using the crucial concepts 1 to 5, we obtain the form of stresses, correct governing Equations (19) and (20) (based on (4) and (5)) and degrees of freedom and . Afterwards, the corresponding virtual work principle (31), following concept 6, renders the correct measures of deformation and . Conversely, we may obtain the governing equations and boundary conditions from the virtual work principle (31), because the degrees of freedom and measures of deformation are correct. On the other hand, by taking incorrect measures of deformation in a postulated virtual work or other variational methods, such as minimizing the total energy potential, we end up with non-physical and inconsistent stresses, governing equations and boundary conditions. This is exactly what happens in the development of higher gradient theories, such as the first strain gradient theory (F-SGT), as detailed in the following section.
3. Strain Gradient Theories
General higher gradient theories were introduced in the 1960s (Kröner [21,22]; Mindlin [12]; Kröner and Datta [23]; Mindlin and Eshel [13]). In these theories, various forms of the gradient of displacement (distortion) or gradient of the strain tensor, such as , , , or have been arbitrarily taken as fundamental measures of deformation. Kröner [21] used strain gradient theories (SG) to describe defects in a continuum. However, the matter has been so unsettled that even at the beginning of the 21st century, Kröner [24] mentions that there are many shortcomings in the development of continuous defect theory.
As explained in Section 2, the consistent measures of deformation and (or ) in C-CST are related to the gradient of the degrees of freedom , and , where
This means that although the quantities , and appear in the analysis of deformation, these are not appropriate measures of deformation. As is well known, in classical or Cauchy theory, is not a suitable measure of deformation. Furthermore, we note that the third and higher gradients, such as , or cannot play any fundamental role in the form of measures of deformation in consistent continuum mechanics, because there would need to be non-physical corresponding energy conjugate stress tensors and additional non-physical balance laws.
As clarified, the measures of deformation are defined by the weak form (virtual work principle) of the governing equations. Therefore, we cannot postulate a weak form (virtual work principle), when the consistent measures of deformations are not known beforehand. By postulating a virtual work principle based on quantities , and as the measures of deformation, many different inconsistent higher gradient theories have been proposed (Mindlin [12]; Mindlin and Eshel [13]; Georgiadis et al. [14]; Aifantis and Willis [15]; Nielsen and Hutchinson [25]). We present the first strain gradient theory (F-SGT), as a prototype of these theories, and examine its inconsistencies in more detail in the following subsection.
3.1. First Strain Gradient Theory
In the simplest higher strain gradient theory, called first strain gradient theory (F-SGT) (Mindlin and Eshel [13]; Georgiadis et al. [14]; Aifantis and Willis [15]; Willis [26]; Nielsen and Hutchinson [25]), the strain gradient tensor
with 27 components is taken as the higher measure of deformation with the obvious symmetry
However, this third order tensor is not a suitable measure of deformation because it requires the existence of a non-physical third order true double-stress tensor (hyper-stress tensor) with 27 components as the corresponding energetically conjugate stress tensor with the symmetry relation
Therefore, in F-SGT, the interaction is represented by the force-traction vector and a non-physical first symmetric double-traction tensor , with
Since the incorrect measure of deformation imposes the form of stresses in this theory, this theory is called the first strain gradient theory (F-SGT), rather than double-stress theory or hyper-stress theory. As previously mentioned, in a systematic theory the form of physical stress tensors dictates the form of measures of deformation, not vice versa.
We notice that in F-SGT the transfer of the interaction in the continuum through a surface element with unit normal vector occurs by means of a force vector and a symmetric double tensor . Therefore, in this first strain gradient theory (F-SGT), the internal stresses are represented by the second order true (polar) force-stress tensor and the third order true (polar) double-stress tensor with 18 independent components, where
The governing equations in the first-strain gradient theory (F-SGT) are usually obtained by postulating a virtual work principle or other variational methods such as minimization of a total energy potential. The virtual work principle for F-SGT is usually postulated as
where the external virtual work and internal virtual work are
Therefore, the virtual work theorem can be written as
As a result, we note that the strain tensor provides a set of degrees of freedom in the external virtual work (49), and a measure of deformation in the internal virtual work δWint (50). This means that the strain tensor is implicitly taken as a measure of deformation and a set of degrees of freedom, simultaneously. Consequently, in F-SGT, the number of degrees of freedom for infinitesimal elements of matter is nine; three corresponding to translations and six corresponding to the fictitious degrees of freedom . This can be seen in the external virtual work, where the tractions and are energetically conjugate to and , respectively, that is
Interestingly, this also shows that the boundary conditions on the surface of the body can be either and as essential (geometrical) boundary conditions, or and as natural (mechanical) boundary conditions. However, the appearance of the strain tensor as an essential boundary condition indicates its inconsistency as a measure of deformation.
In this F-SGT, the force-stress tensor is assumed to be symmetric, such that , and can be decomposed into two symmetric parts and , where
It turns out that is the symmetric force-stress tensor corresponding to its counterpart in classical theory, while represents a symmetric force-stress tensor corresponding to the effect of the non-physical double-stress tensor .
As the virtual work principle (51) shows, the force-stress tensor and the double-stress tensor are energetically conjugate to the strain tensor and the strain gradient tensor , respectively, where
Surprisingly, the virtual work principle (51) requires that the symmetric force-stress part be workless, whereas the symmetric force-stress part and double-stress tensor do work. This strange character clearly is the result of the inconsistency of F-SGT. The manipulation of the postulated virtual work principle (51) results in two sets of fundamental governing equations corresponding to the degrees of freedom and [16]
Surprisingly, the number of governing equations of motion in this theory is nine. The three force Equation (57) correspond to the translational motions , whereas the six symmetric moment Equation (58) correspond to the incorrect strain degrees of freedom . The inconsistent governing Equations (57) and (58) have been presented in several different formats (e.g., Mindlin and Eshel [13]; Georgiadis et al. [14]; Aifantis and Willis [15]; Aifantis et al. [27]; Fleck and Willis [28,29]; Niordson and Hutchinson [30]; Martínez-Pañeda and Fleck [31]).
The moment Equation (58) gives the second symmetric part of the force-stress tensor . Therefore, the total force-stress tensor in F-SGT is expressed as
As a result, the linear governing Equation (57) reduces to
This governing Equation (60) is a set of only three equations representing the linear governing equations of motion. In some developments based on F-SGT, the reduced governing Equation (58) has been given as the sole governing Equation (Gao and Park [32]; Zhou et al. [33]; Gourgiotis et al. [34]; Lazar [35]; Lazar, et al. [36]). However, one must not forget about the six non-physical symmetric moment Equation (58), which have been combined with three force Equation (57) to produce (60).
3.2. Non-Physicality of the Governing Equations in First Strain Gradient Theory
Careful examination shows that the presented first strain gradient theory (F-SGT) resembles an inconsistent mechanics, in which the fundamental governing equations for a system of particles are the force and the invalid and non-physical first symmetric moment equations [5,16]
Here is the total external symmetric moment of external forces exerted on the system, where the first symmetric moment of a force at about the origin is given by the tensor with explicit components
It should be noted that (62) neglects the first symmetric moment of internal forces , thereby violating Newton’s third law of action and reaction [5,16]. Thus, the symmetric moment has no fundamental physical importance in studying equilibrium or motion of a system of particles and continua, because the first symmetric moment of internal forces does not disappear for the system in (62). Newton’s third law of action and reaction allows only the physical moment of internal forces to disappear for a system in (5) [5,16]. As mentioned, this is the reason why the moment vector or its dual, the skew-symmetric moment tensor , and the governing Equation (17) and (18) in couple-stress theory are physical.
For more clarification, we need to reconsider the couple consisting of two forces and in Figure 1. Interestingly, the sum of the symmetric moment of forces and about any arbitrary point is the constant tensor
This means the symmetric moment of a couple is also independent of the position of . Interestingly, only this constant tensor appears in the non-physical symmetric moment Equation (62). Since the first symmetric moment does not result in a valid system of governing equations, it cannot also describe the physical effect of a couple properly. Consequently, the symmetric double-traction tensor and the double-stress tensor do not correctly describe the effect of physical couple-tractions and couple-stresses.
The integral form of governing Equation (61) and (62) for a material continuum occupying a volume enclosed by boundary surface is expressed as
By using the relations (46) and (47) for tractions, the force and first symmetric moment governing Equation (65) and (66) can be written as
Now we use the divergence theorem to obtain
After considering the arbitrariness of volume in (69), we obtain the differential form of the force equation as
The first symmetric moment governing Equation (70) can also be written as
Then, by using the force governing Equation (71), this reduces to
By noticing the arbitrariness of volume , we finally obtain the differential form of the first symmetric moment equation as
Therefore, in this non-physical inconsistent continuum mechanics, which may be called double stress theory, the direct governing Equation (71) and (74) for an infinitesimal element of matter are rewritten as
Therefore, two sets of fundamental differential governing Equation (57) and (58) correspond to force governing Equation (61) and non-physical moment governing Equation (62). Now it is clear that in F-SGT the symmetric double-traction is defined based on the symmetric moment tensor .
Curiously, there is another important point concerning the moment equations in F-SGT. As illustrated, the total force-stress tensor is always taken to be symmetric in F-SGT. As known, this symmetry is a characteristic of the force-stress tensor in classical continuum mechanics, obtained by neglecting the effect of couple-stresses in the physical moment Equation (16) and (24), such that
which leads to the differential form
Use of this symmetry in the virtual work principle (26) shows that the strain tensor is the energy conjugate measure of deformation corresponding to the force-stress tensor in classical continuum mechanics. In F-SGT, this symmetry is effectively enforced by choosing as the conjugate measure of deformation to the force-stress tensor. However, this imposed symmetry contradicts the state of force-stresses in the original Cosserats development [7], as well as in couple stress theory (Mindlin and Tiersten [1]; Koiter [2]; Hadjesfandiari and Dargush [3]; Hadjesfandiari et al [10]; Hadjesfandiari [11]).
With this imposed symmetry in mind, one realizes that the development of F-SGT may be considered to involve a system of 12 governing equations of motion. These include the three force equations, the three physical moment Equation (5) associated with the classical formulation, together with the six non-physical symmetric moment Equation (62) introduced in the F-SGT formulation. The integral form of these governing equations for a material continuum occupying a volume enclosed by boundary surface are
which reduce to the differential form
However, it should be re-emphasized that the effect of couple-stresses has been neglected implicitly in the physical moment Equation (80) and (83). It should be also noted that, in the final formulation, only the six non-physical symmetric moment Equation (58) (or (84) above) appear explicitly, and the number of governing equations is nine.
3.3. Discussion
The higher gradient theories are usually developed by postulating a virtual work principle or other variational methods, such as minimization of a total energy potential, based on arbitrarily chosen higher measures of deformation. As a result, the underlying governing equations and boundary conditions in these theories are invalid. For example, the governing Equation (51) and (52) in F-SGT are implicitly based on the force and first symmetric moment Equation (53) and (54). In particular, the first symmetric moment Equation (54) is non-physical, because the non-zero resultant internal moment has been neglected without any justification in this equation. This violates Newton’s third law of action and reaction. Therefore, the results from a virtual work principle or other variational methods for F-SGT are just mathematical developments without any connection to physical reality. This is the manifestation of the fact that mathematical tools can be very deceitful, if not properly used. It is also a clear reminder that Newton’s laws of motion are more fundamental to the science of mechanics than the Lagrangian approach, although the latter may provide an elegant and insightful formulation.
In summary, the first strain gradient theory (F-SGT) suffers from the following inconsistencies:
- This theory is not based on the rigid body portion of motion of infinitesimal elements of matter at each point of the continuum.
- The number of degrees of freedom for infinitesimal elements of matter is nine, including three corresponding to translations and six corresponding to the incorrect strain degrees of freedom .
- F-SGT violates Newton’s third law of action and reaction.
- The definition of the symmetric couple-traction is based on the symmetric moment tensor , rather than based on the physical skew-symmetric moment or its dual pseudo-vector
- The third order symmetric double-stress tensor has no physical meaning and cannot describe the internal stresses correctly.
- There are nine equations of motion, including three based on the vectorial force and six based on the non-physical tensorial first symmetric moment governing equations. This means incorrect forms of the virtual work principle or energy Equation (the first law of thermodynamics) have been used to develop additional non-physical momentum laws.
- The strain tensor is a measure of deformation and a set of degrees of freedom, simultaneously.
- The strain degrees of freedom can be defined as a set of essential boundary conditions.
- The force-stress tensor is enforced arbitrarily to be symmetric.
- Based on Noether’s theorem [37], there would need to be symmetries of space corresponding to the first symmetric moment governing equations. However, there are no such symmetries of space.
- All fundamental ideas of mechanics related to the definition of static indeterminacy would need to be revised to accommodate the additional six equilibrium equations of F-SGT.
In F-SGT, the incorrect measure of deformation in the postulated virtual work principle (45) results in inconsistent stresses, governing equations and boundary conditions. In continuum mechanics, there is no arbitrariness in the form of measures of deformation. The form of physical stresses dictates the form of measures of deformation in defining the weak form or virtual work principle from the governing equations, not vice versa. Before assuming an energy-density function or postulating a virtual work principle based on the strain gradient tensor , the validity of the strain gradient tensor as a fundamental measure of deformation must be validated. Nevertheless, as illustrated, the necessity of introducing an inconsistent and non-physical third-order symmetric double-stress tensor renders the strain-gradient tensor inadequate as a genuine measure of deformation.
Unfortunately, inconsistent F-SGT and related methods have been used extensively to study size-dependent effects in solids (e.g., Nix and Gao [38]; Chen and Fleck [39]; Aifantis et al. [27]; Gao and Park [32]; Gao and Ma [40]; Fleck and Willis [28,29]; Gourgiotis et al. [34]; Po et al. [41]; De Domenico et al. [42]; Reddy and Sysala [43]; Lazar et al. [36]; Marano et al. [44]; Nielsen and Hutchinson [25]; Solyaev et al. [45]; Delfani and Bidi [46]; Xie and Linder [47]; Fleck and Hutchinson [48]). As demonstrated here, these developments with non-physical double-stresses cannot describe the state of equilibrium in a solid; let alone its elastic or plastic size-dependent effect. All this work must be reconsidered using a consistent size-dependent continuum theory, such as C-CST.
The development in the present paper also reveals the inconsistencies of other higher gradient theories, such as distortion gradient theory (F-DGT), second strain gradient theories (S-SGT), and second distortion gradient theory (F-DGT and S-DGT) [5,16]. Table 1 summarizes the character of consistent couple stress theory (C-CST), first and second strain gradient theories (F-SGT and S-SGT), and first and second distortion gradient theories (F-DGT and S-DGT). This table presents the number of degrees of freedom, measures of deformation, stresses, and governing equations in these theories.
It is important to note that the confusion in the concepts of couple and moment in couple stress theory appears again in higher gradient theories by creating non-physical higher moment stresses and governing moment equations. The main warning is that developing higher gradient theories is not that arbitrary, because any higher strain and distortion gradient measure of deformation requires a new set of non-physical higher moment stresses and governing moment equations, along with inconsistent boundary conditions. If there are second strain gradient or distortion gradient measures of deformation, then there also should be third, fourth and higher strain or distortion gradient measures of deformation. These theories in elasticity depend upon expanding the energy density by a Taylor-like series (Forest [49]). However, this procedure implies that infinitesimal elements of matter have an arbitrarily high number of degrees of freedom, and thus as many governing equations. In the end, there would be no static indeterminacy. One could simply write more and more equations of equilibrium or motion.
4. Conclusions
In this paper, we have examined the mathematical and physical inconsistencies of first strain gradient theory (F-SGT) and several other higher gradient theories. It is apparent that these higher-gradient theories are often developed by postulating a virtual work principle or employing other variational methods, such as the minimization of a total energy potential, based on arbitrarily chosen higher-order measures of deformation. As a result, the resulting governing equations and boundary conditions in these theories are generally invalid. As is well known in physics and mechanics, the governing equations for a system, such as for an infinitesimal element of a continuum, are based on the three force and three physical moment equations. These equations are based on Newton’s second and third laws for a system. Newton’s third law of action and reaction requires that the moment of a force at about the origin be defined as the pseudo-vector , which is dual to . However, the moment governing equations in the first strain gradient theory (F-SGT) are based on the symmetric moment tensor .
Although the deformation in F-SGT and other higher gradient theories is completely specified by the continuous displacement field , the degrees of freedom describing the motion of infinitesimal of elements of matter are not correct. We note that the displacement field represents the translational degrees of freedom at each point, but there are no explicit rotational degrees of freedom in F-SGT and other higher strain gradient theories. As a result, the measures of deformation, internal stresses, and governing equations are inconsistent in these theories. The moment governing equations in these theories are based on non-physical higher moment equations, such as symmetric moment equations, which violate Newton’s third law of action and reaction. Therefore, F-SGT and the higher gradient theories are not an extension of rigid body mechanics, which then cannot be recovered in the absence of deformation. Thus, higher gradient theories are merely mathematical developments, without any connection to physical reality. This is the power of mathematics that although higher gradient theories are incorrect, the corresponding variational methods still may result in a mathematical, but totally non-physical, set of governing equations, constitutive relations and boundary conditions. The combination of mathematical and physical insight is required.
While there may be only one correct and consistent size-dependent continuum mechanics theory, there are many inconsistent theories based on non-physical higher moment equations. Therefore, postulating virtual work principles or other variational methods can be very misleading in developing continuum mechanics when the degrees of freedom and measures of deformation are not known beforehand.
Author Contributions
Conceptualization, A.R.H.; Methodology, A.R.H., G.F.D.; Writing—original draft, A.R.H.; Writing—review & editing, A.R.H., G.F.D.; Both authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
No new data were created or analyzed in this study.
Conflicts of Interest
The authors declare no conflicts of interest.
References
References
- Mindlin, R.D.; Tiersten, H.F. Effects of couple-stresses in linear elasticity. Arch. Rational Mech. Anal. 1962, 11, 415–488. [Google Scholar] [CrossRef]
- Koiter, W.T. Couple stresses in the theory of elasticity, I and II. Proc. Ned. Akad. Wet. (B) 1964, 67, 17–44. [Google Scholar]
- Hadjesfandiari, A.R.; Dargush, G.F. Couple stress theory for solids. Int. J. Solids Struct. 2011, 48, 2496–2510. [Google Scholar] [CrossRef]
- Hadjesfandiari, A.R.; Dargush, G.F. Foundations of consistent couple stress theory. arXiv 1509.06299. 2015. [Google Scholar] [CrossRef]
- Hadjesfandiari, A.R.; Dargush, G.F. Fundamental governing equations of motion in consistent continuum mechanics. arXiv 1810.04514. 2018. [Google Scholar] [CrossRef]
- Voigt, W. Theoretische Studien über die Elasticitätsverhältnisse der Krystalle, I (Theoretical studies in the elastic behavior of crystals). Abh. d. Kön. Ges. d. Wiss., Göttingen 1892, 3–52. [Google Scholar]
- Cosserat, E.; Cosserat, F. Théorie des corps déformables (Theory of Deformable Bodies); A. Hermann et Fils: Paris, 1909. [Google Scholar]
- Hadjesfandiari, A.R.; Dargush, G.F. Evolution of generalized couple-stress continuum theories: a critical analysis. arXiv 1501.03112. 2015. [Google Scholar]
- Eringen, A.C. Theory of micropolar elasticity, Fracture, vol 2, ed. H. Liebowitz, Academic Press, New York. 1968; pp. 662–729. [Google Scholar]
- Hadjesfandiari, A.R.; Hajesfandiari, A.; Dargush, G.F. Skew-symmetric couple-stress fluid mechanics. Acta Mech. 2015, 226, 871–895. [Google Scholar] [CrossRef]
- Hadjesfandiari, A.R. The character of couples and couple stresses in continuum mechanics. Symmetry 2024, 16, 1046. [Google Scholar] [CrossRef]
- Mindlin, R.D. Second gradient of strain and surface-tension in linear elasticity. Int. J. Solids Struct. 1965, 1, 417–438. [Google Scholar] [CrossRef]
- Mindlin, R.D.; Eshel, N.N. On first strain-gradient theories in linear elasticity. Int. J. Solids Struct. 1968, 4, 109–124. [Google Scholar] [CrossRef]
- Georgiadis, H.G.; Vardoulakis, I.; Lykotrafitis, G. Torsional surface waves in a gradient-elastic half-space. Wave Motion 2000, 31, 333–348. [Google Scholar] [CrossRef]
- Aifantis, K.E.; Willis, J.R. Scale effects induced by strain-gradient plasticity and interfacial resistance in periodic and randomly heterogeneous media. Mech. Mater. 2006, 38, 702–716. [Google Scholar] [CrossRef]
- Hadjesfandiari, A.R.; Dargush, G.F. An assessment of higher gradient theories from a continuum mechanics perspective. arXiv 1810.06977. 2018. [Google Scholar] [CrossRef]
- Darrall, B.T.; Dargush, G.F.; Hadjesfandiari, A.R. Finite element Lagrange multiplier formulation for size-dependent skew-symmetric couple-stress planar elasticity. Acta Mech. 2014, 225, 195–212. [Google Scholar] [CrossRef]
- Hadjesfandiari, A.R. Size-dependent piezoelectricity. Int. J. Solids Struct. 2013, 50, 2781–2791. [Google Scholar] [CrossRef]
- Hadjesfandiari, A.R. Size-dependent thermoelasticity. Lat. Am. J. Solids Struct. 2014, 11, 1679–1708. [Google Scholar] [CrossRef]
- Hadjesfandiari, A.R.; Dargush, G.F. Size-dependent torsional oscillation of an elastic wire with circular cross-section. Wave Motion 2025, 133, 103452. [Google Scholar] [CrossRef]
- Kröner, E. On the physical reality of torque stresses in continuum mechanics. Int. J. Engrg. Sci. 1963, 1, 261–278. [Google Scholar] [CrossRef]
- Kröner, E. Elasticity theory of materials with long range cohesive forces. Int. J. Solids Struct. 1967, 3, 731–742. [Google Scholar] [CrossRef]
- Kröner, E.; Datta, B.K. Nichtlokale Elastostatik: Ableitung aus der Gittertheorie. Z. Physik 1966, 196, 203–211. [Google Scholar] [CrossRef]
- Kröner, E. Benefits and shortcomings of the continuous theory of dislocations. Int. J. Solids Struct. 2001, 38(6-7), 1115–1134. [Google Scholar] [CrossRef]
- Nielsen, K.L.; Hutchinson, J.W. Plastic buckling of columns at the micron scale. Int. J. Solids Struct. 2022, 257, 111558. [Google Scholar] [CrossRef]
- Willis, J.R. Some forms and properties of models of strain-gradient plasticity. J. Mech. Phys. Solids 2019, 123, 348–356. [Google Scholar] [CrossRef]
- Aifantis, K.E.; Soer, W.A.; De Hosson, J.T.M.; Willis, J.R. Interfaces within strain gradient plasticity: theory and experiments. Acta Materialia 2006, 54, 5077–5085. [Google Scholar] [CrossRef]
- Fleck, N.A.; Willis, J.R. A mathematical basis for strain-gradient plasticity theory. Part II: Tensorial plastic multiplier. J. Mech. Phys. Solids 2009, 57, 1045–1057. [Google Scholar] [CrossRef]
- Fleck, N.A.; Willis, J.R. Strain gradient plasticity: energetic or dissipative? Acta Mech. Sinica 2015, 31, 465–472. [Google Scholar] [CrossRef]
- Niordson, C.F.; Hutchinson, J.W. Basic strain gradient plasticity theories with application to constrained film deformation. J. Mech. Mat. Struct. 2011, 6, 395–416. [Google Scholar] [CrossRef]
- Martínez-Pañeda, E.; Fleck, N.A. Mode I crack tip fields: strain gradient plasticity theory versus J2 flow theory. Eur. J. Mech. A-Solids 2019, 75, 381–388. [Google Scholar] [CrossRef]
- Gao, X.L.; Park, S.K. Variational formulation of a simplified strain gradient elasticity theory and its application to a pressurized thick-walled cylinder problem. Int. J. Solids Struct. 2007, 44(22-23), 7486–7499. [Google Scholar] [CrossRef]
- Zhou, S.; Li, A.; Wang, B. A reformulation of constitutive relations in the strain gradient elasticity theory for isotropic materials. Int. J. Solids Struct. 2016, 80, 28–37. [Google Scholar] [CrossRef]
- Gourgiotis, P.A.; Zisis, T.; Georgiadis, H.G. On concentrated surface loads and Green’s functions in the Toupin–Mindlin theory of strain-gradient elasticity. Int. J. Solids Struct. 2018, 130, 153–171. [Google Scholar] [CrossRef]
- Lazar, M. Incompatible strain gradient elasticity of Mindlin type: screw and edge dislocations. Acta Mech. 2021, 232, 3471–3494. [Google Scholar] [CrossRef]
- Lazar, M.; Agiasofitou, E.; Böhlke, T. Mathematical modeling of the elastic properties of cubic crystals at small scales based on the Toupin–Mindlin anisotropic first strain gradient elasticity. Contin. Mech, Thermodyn. 2022, 34, 107–136. [Google Scholar] [CrossRef]
- Noether, E. Invariante variationsprobleme. Nachr. d. König. Gesellsch. d. Wiss. zu Göttingen, Math-phys. Klasse 1918, 235–257, English Reprint: physics/0503066http://dx. doi. org/10.1080/00411457108231446, 57. [Google Scholar]
- Nix, W.D.; Gao, H. Indentation size effects in crystalline materials: a law for strain gradient plasticity. J. Mech. Phys. Solids 1998, 46, 411–425. [Google Scholar] [CrossRef]
- Chen, C.; Fleck, N.A. Size effects in the constrained deformation of metallic foams. J. Mech. Phys. Solids 2002, 50, 955–977. [Google Scholar] [CrossRef]
- Gao, X.L.; Ma, H.M. Solution of Eshelby’s inclusion problem with a bounded domain and Eshelby’s tensor for a spherical inclusion in a finite spherical matrix based on a simplified strain gradient elasticity theory. J. Mech. Phys. Solids 2010, 58, 779–797. [Google Scholar] [CrossRef]
- Po, G.; Lazar, M.; Admal, N.C.; Ghoniem, N. A non-singular theory of dislocations in anisotropic crystals. Int. J. Plast. 2018, 103, 1–22. [Google Scholar] [CrossRef]
- De Domenico, D.; Askes, H.; Aifantis, E.C. Gradient elasticity and dispersive wave propagation: Model motivation and length scale identification procedures in concrete and composite laminates. Int. J. Solids Struct. 2019, 158, 176–190. [Google Scholar] [CrossRef]
- Reddy, B.D. Sysala, S. Bounds on the elastic threshold for problems of dissipative strain-gradient plasticity. J. Mech. Phys. Solids 2020, 143, 104089. [CrossRef]
- Marano, A.; Gélébart, L.; Forest, S. FFT-based simulations of slip and kink bands formation in 3D polycrystals: influence of strain gradient crystal plasticity. J. Mech. Phys. Solids 2021, 149, 104295. [Google Scholar] [CrossRef]
- Solyaev, Y.; Lurie, S.; Altenbach, H.; Dell’isola, F. On the elastic wedge problem within simplified and incomplete strain gradient elasticity theories. Int. J. Solids Struct. 2022, 239, 111433. [Google Scholar] [CrossRef]
- Delfani, M.R.; Bidi, H. Strain-gradient solution to elastodynamic scattering from a cylindrical inhomogeneity. Int. J. Mech. Sci. 2024, 261, 108667. [Google Scholar] [CrossRef]
- Xie, J.; Linder, C. Plane strain problem of flexoelectric cylindrical inhomogeneities. Int. J. Solids Struct. 2024, 289, 112649. [Google Scholar] [CrossRef]
- Fleck, N.A.; Hutchinson, J.W. Shear band localization in finite strain deformation theory with strain gradient effects. J. Mech. Phys. Solids 2025, 106371. [Google Scholar] [CrossRef]
- Forest, S. Micromorphic vs. strain and stress gradient theories. Workshop: “Encounter of the third kind” on “Generalized continua and microstructures”, Arpino, Italy, 2018; Available online: https://www.youtube.com/watch?v=gqw85TqhSc0.
Figure 1.
Couple consisting of forces and , and its moment about point O.
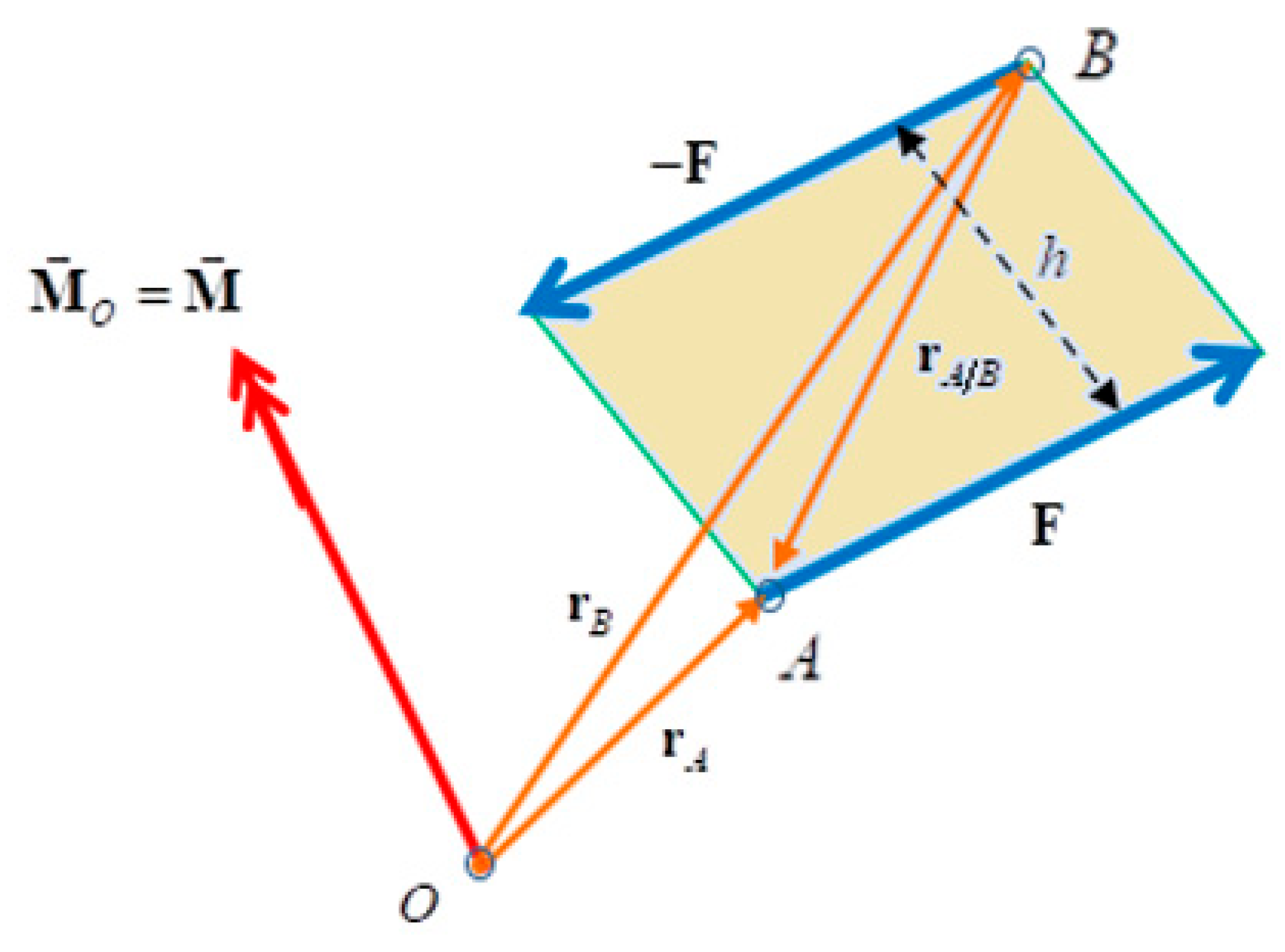
Figure 2.
Couple forces , and its moment, when approaching a concentrated couple.
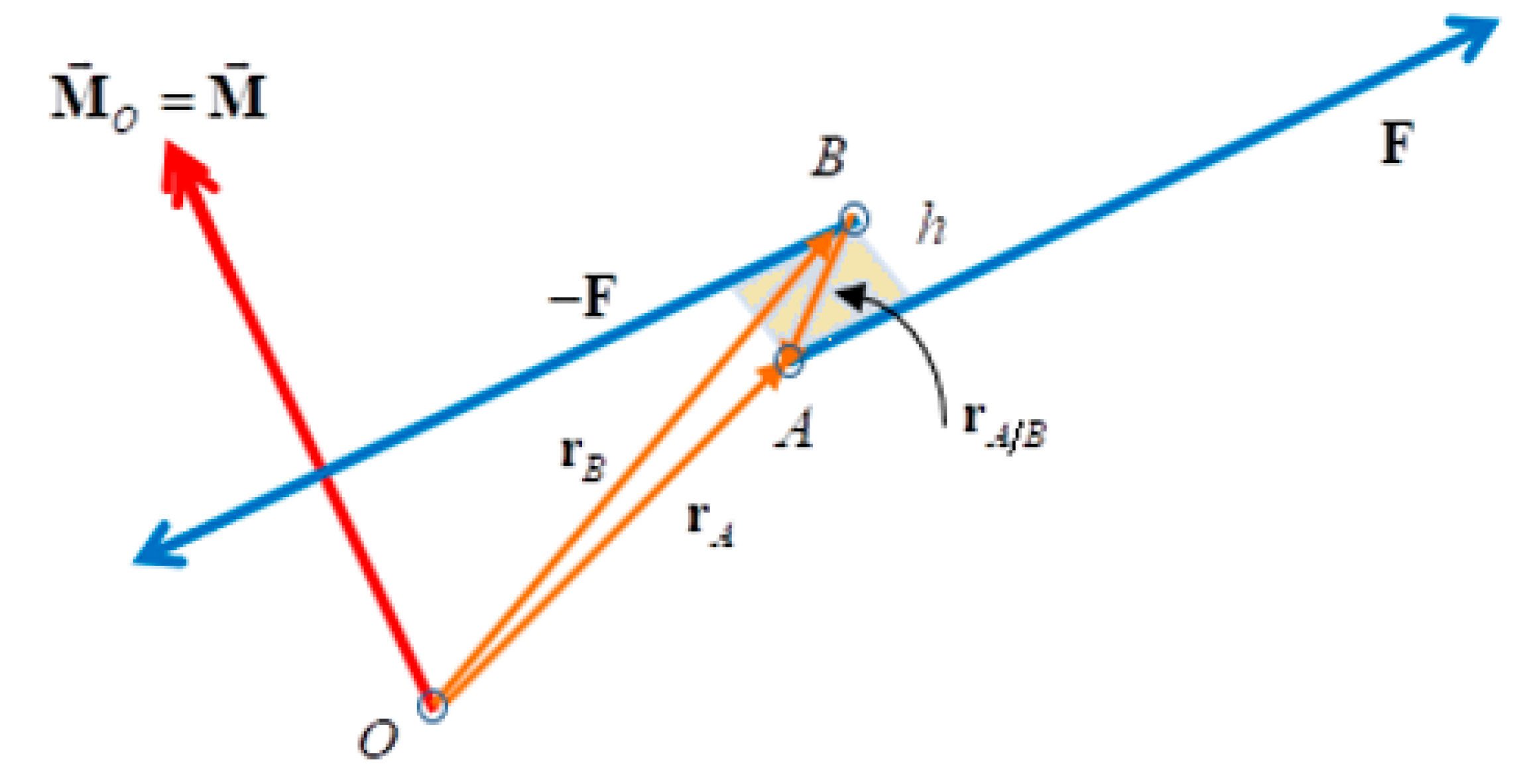
Figure 3.
Concentrated couple of forces and at point A and its moment at point O.
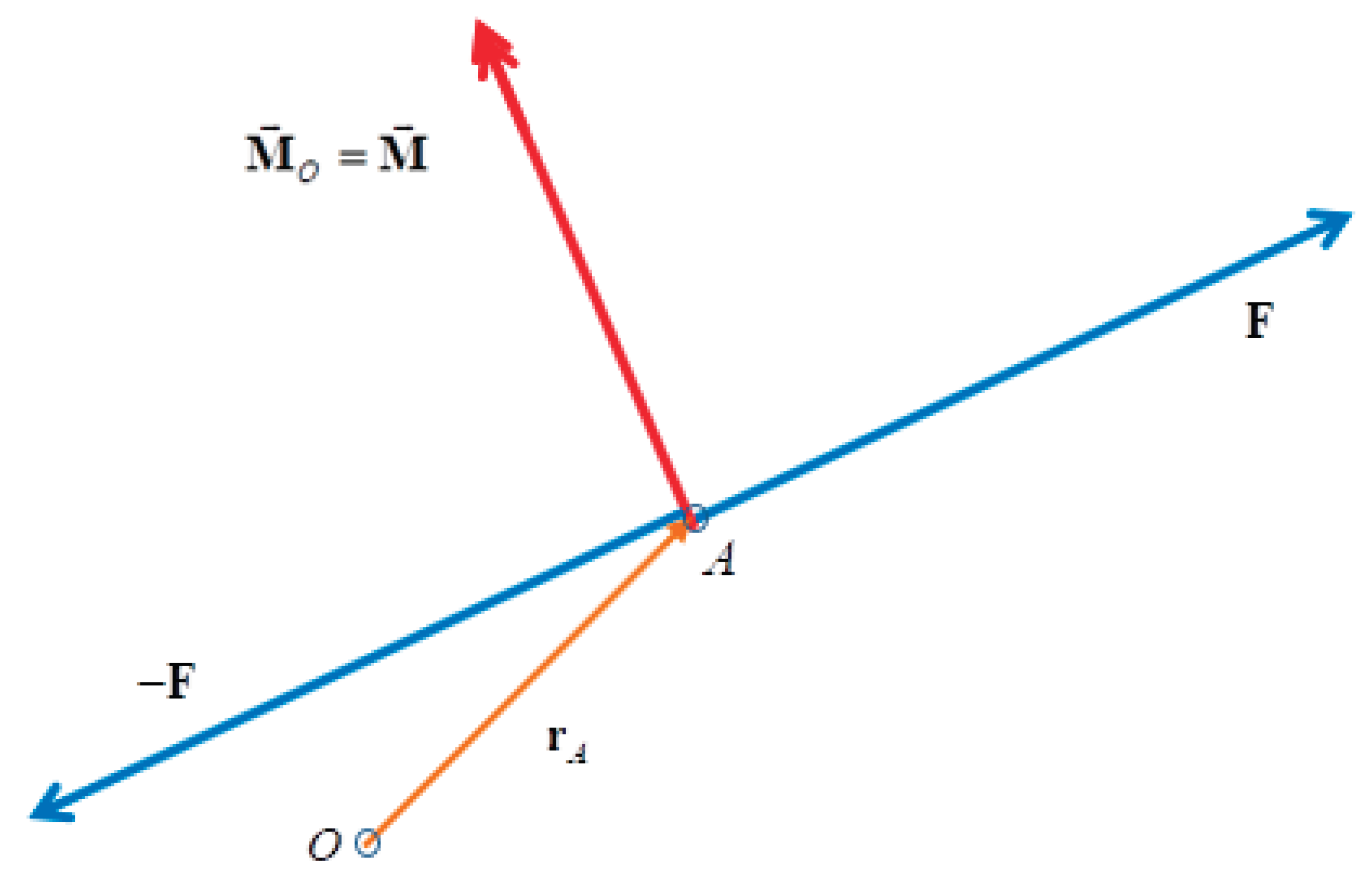

Table 1.
Characteristics of different higher order theories.
| Theory | Degrees of freedom | Measures of deformation | Stresses | Number of governing equations |
| C-CST Hadjesfandiari and Dargush [3] |
6 |
9 |
12 |
6 |
| F-SGT First strain gradient theory |
9 |
24 |
24 |
9 |
| S-SGT Second strain gradient theory |
27 |
60 |
60 |
27 |
| F-DGT First distortion gradient theory |
12 |
24 |
24 |
12 |
| S-DGT Second distortion gradient theory |
30 , |
51 |
51 |
30 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



