Submitted:
16 January 2026
Posted:
16 January 2026
You are already at the latest version
Abstract
Gibson’s concept of optic flow established that perception is grounded in lawful, action-generated structure rather than in discrete sensory signals. While optic flow specifies self-motion visually, no corresponding framework has been formally established for the mechanical and kinesthetic information generated during skilled action. This study introduces haptic flow as a screw-structured, symmetry-bearing invariant that specifies kinesthetic information in human movement. Using screw theory, we model haptic flow as the continuous evolution of instantaneous screw axes and pitch, capturing the coupled rotational–translational dynamics of the body–object system. This framework is applied to the golf swing as a paradigmatic case of skilled manipulation. Motion data from proficient and novice performers reveal clear geometric differences: proficient performance is characterized by coherent alignment between instantaneous screw axes and the club’s principal inertia axis, stabilization of pitch through impact, and the emergence of harmonic screws lying on a common cylindroid. In contrast, novice performance exhibits fragmented screw organization, elevated pitch variability, and pronounced geometric asymmetry. These results demonstrate that skilled manipulation is structured by a continuous, internally generated flow of mechanical information that is invariant across critical phases of action. Interpreted in Gibsonian terms, harmonic screws function as perceivable affordances—symmetry-stabilized modes that couple inertia and potential and guide action without reliance on explicit feedback or internal models. The proposed concept of haptic flow thus extends ecological perception–action theory into the mechanical domain and provides a quantitative symmetry-based framework for analyzing skilled human movement.
Keywords:
harmonic screws
; haptic flow
; screw theory
; symmetry in movement
; ecological perception
; golf swing biomechanics
; instantaneous screw axis
; pitch invariance
1. Introduction
1.1. Symmetry as an Organizing Principle in Human Movement
Human movement exhibits striking regularities despite the apparent redundancy of the musculoskeletal system. Since the seminal work of Bernstein, skilled action has been understood not as the control of individual degrees of freedom, but as the emergence of coordinated patterns that reduce complexity through functional organization [1]. These patterns are often described in terms of symmetry: recurrent spatial–temporal structures that remain stable under variation in speed, load, or environmental conditions.
From an ecological perspective, Gibson further argued that such regularities are not imposed by internal programs but are specified by lawful relations between action and the information generated by that action [2,3]. In this view, perception and action form a closed loop: movement produces structured stimulation, and this stimulation in turn guides further movement. Symmetry, therefore, is not merely descriptive but reflects invariants in the perception–action coupling that underlies skilled behavior.
Despite its conceptual importance, in the movement science literature, symmetry has typically been described either qualitatively—through coordination patterns and phase relations—or statistically, using indices derived from kinematic or kinetic time series [4,5,6,7]. Explicit geometric formulations of symmetry as invariant structures in space–time remain comparatively rare. In particular, the coupling between rotational and translational components of movement—central to whole-body actions such as striking, throwing, or locomotion—remains difficult to quantify using conventional vector-based descriptions.
1.2. From Harmonic Modes in Locomotion to Harmonic Screws in Manipulation
In locomotion research, coordinated movement has long been described in terms of harmonic modes—natural oscillatory patterns that emerge from the interaction of inertia, elasticity, and gravity. During steady gait or hopping, the human body behaves as a compliant system whose dynamics can be captured by spring–mass models [8,9]. Rather than being imposed by central control commands, these oscillatory patterns arise from the mechanical structure of the leg–ground system and are perceived directly by the mover as stable, repeatable modes of action.
In earlier work on hopping and running, we modeled the leg as a multi–degree-of-freedom spring chain operating near a position of stable equilibrium [10]. When the leg spring is displaced during hopping, the resulting forces do not act independently but evoke a structured set of internal reactions. Importantly, we showed that if the leg is displaced about a harmonic mode, the forces generated by the system tend to restore motion along the same mode, leading to sustained oscillation about that direction. In this context, a harmonic mode corresponds to a direction in the system’s configuration space along which inertial and elastic effects are dynamically conjugate. This property explains the leg’s natural shock absorption capability and the robustness of rhythmic locomotion.
From the perspective of screw theory [11], such harmonic modes in hopping can be reinterpreted as a degenerate case of harmonic screws. Because hopping is dominated by motion along a single principal direction, rotational components are minimal, and the harmonic screw reduces to an effective oscillatory direction with near-zero pitch. The harmonic mode identified in the leg spring is therefore a special case in which the coupled rotation–translation structure collapses to predominantly translational oscillation.
The present work extends this idea beyond locomotion to skilled manipulation, where rotational and translational components cannot be separated. Manipulative actions such as the golf swing require coordinated motion across the entire body–implement system, with rotation and translation tightly coupled and continuously evolving. In this regime, harmonic modes are no longer sufficient descriptors. Instead, a more general geometric framework is required—one that preserves rotation–translation coupling and remains invariant under changes of reference frame.
Screw theory provides precisely this generalization. By representing motion as twists and forces as wrenches, harmonic modes in locomotion are extended to harmonic screws in manipulation. A harmonic screw defines a direction in screw space along which inertial and restoring effects are dynamically aligned, allowing motion to evolve coherently without dispersing into competing degrees of freedom. Just as harmonic modes stabilize hopping, harmonic screws stabilize skilled manipulation by constraining motion to symmetry-bearing directions in the combined body–object system.
In this sense, harmonic screws constitute the natural continuation of harmonic modes from locomotion to manipulation. They provide a unified description of how biological systems exploit mechanical structure to generate stable, perceivable, and efficient movement patterns across qualitatively different tasks.
Screw theory provides such a framework. Unlike vectors, which encode magnitude and direction alone, screws encode the coupled structure of rotation and translation and remain invariant under changes of reference frame [12,13]. A screw therefore specifies not only how much and where motion occurs, but how rotational and translational components are intrinsically linked.
This distinction is critical for understanding action-produced information [3]. The structured stimulation arising from movement—traditionally described in vision as optic flow—cannot, in the haptic–kinesthetic domain, be represented by vectors alone. Instead, the information generated by movement through muscle tension, joint constraint, and inertia is inherently screw-structured. In the present manuscript, we refer to this structured, action-generated field of force–moment relations as haptic flow, by direct analogy with optic flow.
Importantly, this usage follows Gibson’s original logic. Just as optic flow [3] specifies self-motion through lawful transformations of the ambient optic array, haptic flow specifies self-motion through lawful transformations of the internal force–moment structure produced by action. This information is obtained, not imposed; it does not depend on specialized proprioceptive receptors, but arises from the continuous reafference generated by movement itself.
Within this framework, harmonic modes of locomotion generalize naturally to harmonic screws in manipulation: screw directions along which inertial and restoring effects align, producing mechanically efficient and perceptually salient movement.
1.3. Aim and Hypothesis
The golf swing provides an ideal context in which to investigate this hypothesis. It is a high-speed, whole-body action involving strong inertial coupling between the golfer and the club, where efficiency, timing, and repeatability are essential. Despite substantial joint motion and large external forces, skilled golfers reliably reproduce impact conditions, suggesting the existence of an underlying invariant structure.
The aim of this study is to formalize harmonic screws as symmetry-bearing invariants of skilled human movement and to demonstrate their relevance in a representative manipulation task—the golf swing. Using screw-theoretic analysis of kinematic data, we examine how translational and rotational components of motion co-vary along instantaneous screw axes and how this coupling differs between skilled and novice performers.
We hypothesize that skilled golfers stabilize movement by selecting a harmonic screw along which inertial and restoring wrenches coincide, giving rise to a coherent haptic flow that supports perceptual kinesthesis and efficient action. In contrast, novice performance is expected to exhibit unstable screw coupling and fragmented haptic flow, reflecting the absence of such symmetry-based invariants.
By linking ecological theory, screw geometry, and empirical kinematics, this work seeks to provide a unified account of how symmetry, perception, and mechanics coalesce in skilled human movement.
2. Materials and Methods
If haptic flow exists, it must appear as a coherent, continuous structure in screw-space. We therefore quantify motion using instantaneous screw axes, pitch, and striction curves.
2.1. Participants and Study Design
This study leveraged a previously validated biomechanical dataset [14] that recorded full-body golf swing dynamics of two female participants representing contrasting levels of expertise (Table 1).
The selection of this dataset was motivated by its comprehensive multi-modal instrumentation, which included high-speed motion capture synchronized with ground reaction force (GRF) data, providing a robust platform for advanced mechanical modeling.
The original data acquisition was conducted using a 12-camera Qualisys optoelectronic motion capture system (model: Oqus-300, Qualisys AB, Gothenburg, Sweden) operating at a sampling frequency of 300 Hz. A total of 24 retroreflective markers, in conjunction with 4 rigid-body clusters, were affixed to key anatomical landmarks following ISAK anthropometric protocols. This configuration enabled accurate 3D tracking of major body segments (e.g., head, thorax, pelvis, upper and lower limbs) and the golf club. Simultaneously, kinetic data were acquired via a Kistler force platform, aligned with the lead foot to define the global reference frame based on the initial center of pressure (COP).
In the present study, instantaneous screw axes were computed frame-by-frame from experimentally measured marker trajectories using a linear line-complex formulation. For each pair of successive ISAs, the corresponding central point was computed according to Equation (11). The striction curve was then obtained as the ordered locus of these central points over the downswing interval.
2.2. Screw-Theoretic Representation (Twist, Pitch, Inertia)
2.2.1. Motor Units and Muscle Synergy as a Geometric Manifold
Bernstein [4] defined coordination as the solution to the problem of redundant degrees of freedom (DOF), whereby effective movement emerges through functional organization rather than explicit control of individual variables. This insight forms the foundation of modern synergy theories in motor control [15].
Muscles are therefore not treated as independent functional units. Instead, movement is generated through the collective action of distributed motor units, each consisting of a motor neuron and the muscle fibers it innervates. These motor units are distributed across multiple muscles and mechanically coupled through a continuous myofascial network, enabling force transmission beyond individual anatomical boundaries [16,17].
As illustrated in Figure 1, this distributed organization forms a manifold of tension lines rather than a single resultant force vector. Panel (a) shows fiber tractography of the lateral gastrocnemius muscle, revealing dense bundles of fibers whose local tensions contribute to global movement. Panel (b) presents a geometric abstraction in which this fiber manifold is approximated by an instantaneous screw and its perpendicular pole q.
This screw-based representation provides a mechanical bridge between distributed muscular action and whole-body motion, allowing muscle synergies to be treated as geometrically coherent structures compatible with screw-theoretic analysis.
2.2.2. Spatial Screw Representation, Pitch, and the Structure of the Haptic Flow
In screw theory, any instantaneous rigid-body motion is represented as a twist, expressed in Plücker coordinates [18] as a six-dimensional vector combining angular and linear velocity:
where denotes angular velocity and denotes linear velocity. Geometrically, a twist defines a helicoidal velocity field in space: material points move along helices whose axes coincide with the instantaneous screw axis (ISA) (Figure 2).
The pitch p of the screw quantifies the ratio of translation to rotation along the screw axis and is defined as:
A pitch of corresponds to pure rotation, while corresponds to pure translation. Intermediate values describe helicoidal motion and provide a compact scalar measure of rotational–translational coupling. In the present context, pitch serves as an invariant descriptor of how motion is organized along a preferred screw direction.
Crucially, motion does not exist in isolation from dynamics. The twist induces a corresponding wrench through the spatial inertia tensor [19]:
where is the momentum screw, combining torque and force. This relation maps the helicoidal velocity field into a dual helicoidal wrench field, representing the spatial distribution of internal moments and forces generated by the motion (Figure 3).
The twist and wrench fields are geometrically dual: while the twist describes how points in space move, the wrench describes how forces and moments are distributed along the same screw geometry. Importantly, the pitch associated with the wrench field is not arbitrary; when the induced wrench remains aligned with the generating twist, the motion occurs along a harmonic screw. Under this condition, translational and rotational components of both motion and force remain proportionally coupled.
Figure 2 and Figure 3 together illustrate this dual structure. The helicoidal field of twists specifies a lawful pattern of action-generated motion, while the corresponding helicoidal field of wrenches specifies a lawful pattern of action-generated mechanical consequence. The shared pitch of these fields defines a common geometric invariant linking kinematics and dynamics.
This coupled twist–wrench structure constitutes what we refer to as the haptic flow. Unlike vector-based descriptions, which encode only local direction and magnitude, the haptic field preserves rotation–translation coupling, global spatial coherence, and invariance under transformation. When this field evolves smoothly over time, as observed in skilled performance, it forms a continuous haptic flow: an action-generated pattern of mechanical information specifying the performer’s own movement.
Thus, pitch-stabilized screw motion provides the geometric and physical basis by which internal dynamics become perceptually available without reliance on localized feedback signals. The haptic flow emerges directly from the lawful duality between helicoidal twist and wrench fields, offering a mechanical counterpart to optic flow in the visual domain.
2.2.3. Harmonic Screws Aligning Inertial and Restoring Screw Structures
The inertial properties of the golf club are represented by the spatial inertia tensor (Figure 4), which maps a twist to its corresponding momentum screw:
The principal screws of inertia are obtained by solving the eigenvalue problem:
where denotes an inertial eigenscrew and its associated eigenvalue.
Similarly, restoring forces arising from muscular stiffness and ground support are modeled using a potential (stiffness) tensor , which maps twists to restoring wrenches:
The principal screws of stiffness satisfy:
where denotes a stiffness eigenscrew.
Assuming conservative dynamics with light damping, the coupled motion of the club–body system is governed by:
Seeking harmonic solutions of the form yields the generalized eigenvalue problem:
where defines a harmonic screw [11] and the associated natural frequency.
A harmonic screw represents a direction along which inertial and restoring effects are dynamically aligned. Motion along this screw minimizes internal work while preserving geometric coherence of the movement.
2.3. Quantification of Haptic Flow
2.3.1. Geometric Interpretation and Cylindroid Constraint
Under effective two-degree-of-freedom constraints, harmonic screws reside on a cylindroid, a ruled surface generated by the combination of inertial and stiffness eigenscrews. The instantaneous screw axis (ISA) observed during the golf downswing corresponds to an intermediate screw on this surface.
Importantly, all screws in Ball’s formulation are defined in a global spatial frame [20]. Consequently, the effective degrees of freedom are not associated with individual anatomical segments but with dominant global screw tendencies arising from club inertia and muscular restoring constraints.
The harmonic screw thus emerges as the motion mode that both the body and the club dynamically and perceptually “agree upon”, providing a unified geometric description of skilled movement.
2.3.2. Ruled Surface Generated by Instantaneous Screw Axes
During a finite movement, the instantaneous screw axis (ISA) does not remain fixed in space but evolves continuously. The family of successive ISAs therefore generates a ruled surface [21] composed of a one-parameter set of straight-line generators. Let the instantaneous screw at time t be expressed in Plücker coordinates as
where is the unit direction vector of the screw axis and is its moment vector with respect to the origin.
As t varies, the locus of the corresponding screw axes forms a ruled surface in space. In classical screw theory, such surfaces include cylindroids and axodes, which arise naturally from families of screws related by a law of pitch distribution [22]. In the present context, the ruled surface is empirically determined from measured kinematic data and represents the evolving geometric structure of the motion.
2.3.3. Definition of the Striction Curve
Associated with any ruled surface is a distinguished curve known as the striction curve [21]. In screw-theoretic terms, the striction curve is defined as the locus of central points, that is, the points of minimum distance between neighboring generators of the ruled surface [21].
Consider two infinitesimally separated instantaneous screw axes, and . The common perpendicular between these two lines intersects each generator at a unique point. The intersection point on is referred to as the central point. The collection of all such points defines the striction curve.
Following the classical derivation of Hunt [13], the position vector of the central point can be written as
where denotes differentiation with respect to the curve parameter t. Equation (11) defines the striction curve intrinsically from the screw field and is independent of the choice of coordinate frame.
The striction curve is thus given by
and represents the geometric backbone of the ruled surface generated by the ISA family.
Geometrically, the striction curve identifies where successive screw axes are most closely organized in space. Physically, it represents the locus about which the instantaneous motion exhibits maximal coherence. While each ISA describes a local instantaneous constraint, the striction curve captures a global, time-integrated invariant of the movement.
In the context of skilled human motion, the ruled surface generated by ISAs reflects the available kinematic freedom of the moving segment or tool, whereas the striction curve reflects how this freedom is structured and progressively constrained. Smoothness and continuity of the striction curve are therefore indicative of coordinated, stable movement organization, whereas fragmentation or abrupt changes in the curve signal kinematic asymmetry or loss of control.
2.3.4. Special Case: Cylindroid with One Screw of Infinite Pitch
Consider a rigid body subjected to two elementary motions. Let be a screw of finite pitch [11]p about the axis (Figure 5), about which the body receives a small twist of amplitude . Let be a screw of infinite pitch, corresponding to a pure translation of magnitude p along a direction , parallel to itself.
The objective is to determine the cylindroid generated by the combination of these two screws.
Let the plane be defined by the axes and . In this plane, draw a line perpendicular to , and denote the angle by X. The translation of magnitude p along can then be resolved into two components:
- a component parallel to the screw axis ,
- a component parallel to .
Next, erect a normal perpendicular to the plane , such that its length satisfies the condition
The combined effect of the rotational twist about and the translational motion along is therefore equivalent to a single twist of amplitude about a screw passing through the point T and parallel to .
The pitch of this resultant screw is given by
which yields
To visualize this result, consider the plane perpendicular to that intersects the line (Figure 6). In this plane, the ordinate of each point corresponds to the pitch of the screw passing through that point. When , the point T coincides with a point H on the normal such that . The point H therefore lies on the screw of zero pitch contained within the cylindroid.
This construction leads to the following theorem.
2.3.4.1. Theorem.
If one screw on a cylindroid has infinite pitch, the cylindroid reduces to a plane. The screws on the cylindroid form a system of parallel lines, and the pitch of each screw is proportional to its perpendicular distance from the screw of zero pitch.
3. Results
3.1. Emergence of Haptic Flow in Skilled Manipulation
Figure 7 and Figure 8 compares the spatial organization of the instantaneous screw axes (ISA) and the principal inertia axis for proficient and novice golfers. In the proficient golfer, the ISA trajectories form a coherent bundle that evolves smoothly through the downswing and converges toward alignment with near impact. This organization yields a well-defined ruled surface whose striction curve is continuous and extended.
In contrast, the novice golfer exhibits dispersed ISA trajectories with frequent reorientation and reduced alignment with . The resulting ruled surface is fragmented, and its striction curve is shorter and irregular, with abrupt curvature changes near impact.
Figure 9 shows the temporal evolution of screw pitch for both golfers. The proficient golfer demonstrates a smooth pitch trajectory with low variance and a pronounced extremum localized at impact. The novice golfer exhibits higher variability and multiple local extrema, indicating unstable coupling between rotational and translational components of motion.
Taken together, the stabilization of pitch at impact, the convergence and alignment of ISAs with , and the co-cylindrical organization of harmonic screws provide direct kinematic and geometric evidence for the existence of haptic flow in skilled manipulation. The observed structure reflects a continuous, action-generated pattern of mechanical information that becomes most salient at impact, supporting the claim that skilled movement is guided by internally generated, screw-structured invariants rather than by discrete feedback signals.
Consistent with the pitch results, the spatial distribution of ISAs extracted throughout the downswing converged toward a narrow bundle in the skilled golfer, evolving smoothly in time rather than exhibiting abrupt reorientation. These ISAs clustered around a dominant direction coincident with the club’s principal inertia axis , indicating a strong alignment between the direction of motion and the club’s internal inertial structure. This alignment was most pronounced in the interval immediately preceding and including impact.
Geometric reconstruction of the resulting screw structure further revealed that the dominant screws observed at impact lay on a common cylindroid surface. The co-cylindrical arrangement demonstrates that the motion at impact was not an isolated event but the culmination of a continuous screw evolution initiated earlier in the downswing. The harmonic screws observed at impact therefore emerged from the global dynamics established by the golfer’s prior movement, rather than being generated locally at ball contact.
This screw-based organization corresponds to a continuous flow of internally generated mechanical information. The mapping from twist to momentum,
reveals that the golfer’s motion produced a structured distribution of internal forces and moments that evolved lawfully over time. Rather than fluctuating irregularly, this distribution formed a smooth, directed field aligned with the dominant screw direction.
Taken together, the convergence of ISAs, their alignment with , the stabilization of pitch, and the co-cylindrical organization of harmonic screws provide direct kinematic and geometric evidence for the existence of haptic flow in skilled manipulation. The observed structure reflects a continuous, action-generated pattern of mechanical information that remains invariant across the critical phase of performance, supporting the claim that skilled movement is guided by internally generated, screw-structured information rather than by discrete feedback signals.
Figure 10 shows the striction curves, defined as the locus of central points of the ISA ruled surface. In the proficient golfer (Figure 10A), the striction curve is smooth and continuous, extending from early downswing through impact and into the follow-through. The novice golfer (Figure 10B) displays a shorter, irregular striction curve with clustering and abrupt curvature changes near impact.
Across both representations, proficient performance is characterized by coherent ISA– organization and a well-defined striction curve, whereas novice performance shows pronounced geometric asymmetry and reduced continuity.
3.2. Harmonic Screws and Cylindroid Geometry at Impact
To interpret the observed ISA convergence and pitch stabilization, the screw dynamics were examined in the context of harmonic screws. Figure 11 illustrates a cylindroid surface generated by two independent global screw tendencies: one associated with the inertial properties of the club–body system and the other associated with restoring constraints arising from muscular action and ground interaction.
Two harmonic screws, shown as red lines, lie on this cylindroid surface and represent eigen-solutions of the combined inertia–stiffness system. At impact, these harmonic screws were found to be co-cylindrical [11], sharing the same ruled surface and geometric origin. The ISAs observed in the proficient golfer closely approximated these harmonic screws during the late downswing, indicating convergence toward dynamically admissible screw modes.
This co-cylindrical alignment implies that skilled impact does not arise from arbitrary joint coordination but from motion constrained to a family of geometrically permissible screw paths. The observed ISA trajectories reflect selection of an intermediate screw on the cylindroid, consistent with harmonic motion that balances inertial and restoring influences.
3.3. Relation Between Harmonic Screws and Pitch Invariance
The alignment of ISAs with harmonic screws provides a geometric explanation for pitch invariance in skilled performance. As the motion converges toward a harmonic screw, the ratio between translational and rotational velocity components remains approximately constant, resulting in a stable pitch profile. This behavior reflects dynamic equilibrium between inertia and restoring constraints, producing a helicoidal motion that is both mechanically efficient and temporally predictable.
In the novice golfer, the lack of convergence toward harmonic screws corresponds to unstable pitch behavior and irregular force–motion coupling. The absence of a dominant screw mode prevents stabilization of pitch and contributes to variability at impact.
3.4. Summary of Key Findings
The results demonstrate that skilled golf swing dynamics are characterized by:
- Progressive convergence of instantaneous screw axes toward a low-dimensional geometric structure;
- Stable pitch profiles temporally synchronized with a single, well-timed vertical GRF peak;
- Co-cylindrical alignment of harmonic screws at impact on a common cylindroid surface;
- Approximation of executed motion to dynamically admissible harmonic screw modes.
Together, these findings indicate that expert performance emerges from stabilization of global screw geometry rather than from independent control of individual joints or segments.
3.5. Special Case of Haptic Flow at Impact: Cylindroid with Infinite Pitch
A particularly revealing manifestation of haptic flow occurs at the moment of impact, where the club–ball interaction exhibits an apparent paradox: a rapid, directed translation of the clubhead without an observable instantaneous axis of rotation. This phenomenon corresponds to a special case in screw theory described by Ball as a cylindroid with one screw of infinite pitch [11], and is closely related to the classical mechanical concept of the axis of percussion.
This special case is of particular relevance at impact conditions in skilled manipulation. At the instant of percussion, the motion of the body may be locally approximated by the superposition of two screws of opposite pitch, whose combination produces a transient state of pure translation. In biomechanical terms, this configuration corresponds to a momentary elimination of rotational effects at the point of contact, consistent with the phenomenon of the sweet spot.
Figure 11 schematically illustrates this configuration. During the downswing, the club motion is governed by a family of instantaneous screws whose axes evolve smoothly and lie on a common cylindroid. As impact is approached, two dominant screw components emerge with equal magnitude but opposite pitch. These screws do not coincide spatially; instead, they act as a conjugate pair whose combined effect eliminates net angular rotation at a specific point along the clubhead.
3.6. Mechanical Realization of Opposing Angular Velocities and Applied Translation
It is necessary to emphasize that the two angular velocities responsible for generating pure translation must be arranged not merely in parallel, but in series in the mechanical sense [23]. That is, the angular velocities must act sequentially on an intermediate body so that their combined effect produces a translational velocity field rather than a resultant rotation. This distinction, analogous to the electrical difference between parallel and series configurations, is essential for realizing the applied rate of translation illustrated in Figure 11, where a suitable mechanical device for applying such angular velocities is shown schematically.
Two parallel shafts carry pulleys of identical diameter, rigidly attached to bodies 1 and 3, respectively. An intermediate body 2 is coupled to both pulleys by a continuous belt. This belt arrangement ensures that the angular velocities transmitted to body 2 are not only parallel, but also equal in magnitude and opposite in direction. As a result, body 2 is subjected to a couple of angular velocities separated by a finite distance d.
The mechanical consequence of this configuration is the generation of a uniform field of linear velocities on the distal body, given by
which defines the applied rate of translation [23]. Importantly, this translational effect is not achieved through local actuation or explicit control of linear motion, but emerges from the geometric arrangement of rotational inputs.
Within the context of the present manuscript, this device serves as a mechanical analogue for skilled movement at impact. The golfer does not directly control translation of the club head; instead, translation arises as an emergent consequence of coordinated, opposing rotations of the lower and upper body, constrained by ground interaction and inertial coupling. The applied rate of translation thus reflects a dynamically admissible screw motion selected from a cylindroid of harmonic possibilities, rather than an outcome of feedback-based regulation.
This interpretation reinforces the central thesis that skilled impact is governed by ecological and geometric constraints. The visually perceived translation of the club head constitutes a perceptual invariant, while the underlying angular velocities remain non-perceivable and mechanically distributed across the body–environment system.
In Ball’s formulation (Section 2.3.4, Cylindroid with One Screw of Infinite Pitch), the superposition of two screws with equal intensity and opposite pitch yields a resultant motion that is purely translational. Let the two contributing twists be expressed as
with pitches p and , respectively. Their sum produces a resultant twist
corresponding to translation with infinite pitch and no finite screw axis. The applied rate of translation is given by
where denotes the separation vector between the two screw axes. Importantly, this translational motion arises without any apparent rotational center and exists only transiently.
This special configuration explains the mechanical basis of the club’s sweet spot. At the impact point corresponding to the axis of percussion, the golfer experiences minimal reactive torque at the hands while maximizing translational impulse to the ball. The absence of a perceived rotational axis at this instant is not a lack of structure, but rather the consequence of a highly specific screw superposition.
4. Discussion
4.1. Harmonic Screws as Symmetry-Bearing Invariants
4.1.1. Haptic Flow, Skill, and Symmetry in Screw Organization
The correlations observed between ISA organization, alignment, and pitch stabilization provide insight into how skilled performers perceive and utilize haptic flow. In the present framework, haptic flow is not inferred from localized sensory signals but from the global, action-generated structure of screw motion evolving in space and time.
For the proficient golfer, the convergence of ISA trajectories toward and the emergence of a smooth striction curve indicate a symmetry-bearing organization of motion. This geometric regularity reflects a stable coupling between inertia and applied forces, yielding a flow of mechanical information that remains invariant across the critical phase of impact. Such invariance constitutes a perceivable affordance, enabling the performer to guide action without explicit reference to joint-level control variables.
In contrast, the novice golfer’s fragmented ISA structure and irregular pitch evolution reflect a breakdown of this symmetry. The absence of a coherent striction curve suggests that the underlying screw organization fails to stabilize, resulting in diminished perceptual availability of haptic flow.
Within the agenda of symmetry in human movement, these findings demonstrate that skilled manipulation is characterized not merely by reduced variability but by the emergence of geometrically structured invariants. Harmonic screw organization thus provides a concrete link between mechanical symmetry, perceptual affordances, and expert motor performance.
4.1.2. Perception of Affordances Through Screw Organization
Gibsonian theory emphasizes that affordances are perceived directly through lawful structure in stimulation [24]. In visual locomotion, this structure is optic flow; in skilled manipulation, our results indicate that it is screw-structured haptic flow. The ISA bundle and pitch trajectory together specify a continuous mechanical field generated by the performer’s own action, rather than feedback from isolated receptors.
Importantly, pitch provides a scalar summary of rotational–translational coupling that is both physically meaningful and perceptually salient. The smooth pitch extremum observed at impact in the proficient golfer reflects a transient but highly organized state in which internal dynamics, external contact, and task goal coincide. This moment corresponds to maximal informational coherence in the haptic flow field, offering a clear affordance for effective energy transfer.
The novice golfer’s irregular pitch profile, by contrast, suggests that the affordance is not reliably specified. From this viewpoint, skill acquisition can be interpreted as learning to stabilize the symmetry of haptic flow—selecting and maintaining a preferred harmonic screw structure rather than correcting errors post hoc.
4.1.3. Harmonic Screws, Eigenmodes, and Symmetry Selection
The observed organization closely parallels the concept of harmonic screws in classical screw theory. Harmonic screws represent directions along which inertial and potential effects are conjugate [25], allowing motion to persist without inducing destabilizing forces. In dynamical terms, they function analogously to eigenmodes.
In earlier locomotion studies, harmonic modes were shown to underpin stable hopping and running by aligning displacement and restoring forces. The present work extends this principle to manipulation: the skilled golfer appears to select a harmonic screw during the downswing, around which both motion (twist) and internal dynamics (wrench) remain conjugate. This selection constitutes a symmetry choice—one that minimizes internal conflict and maximizes perceptual clarity.
Within the Symmetry framework, harmonic screws thus bridge geometry, dynamics, and perception. They are not merely mathematical constructs, but functional symmetries that support both control and perception.
4.2. Haptic Flow as Perceptual Information
Haptic flow is not sensed at a point but specified across a field of mechanical relations. Here, haptic flow refers to a continuous, action-generated field of inertial and contact information specified by the lawful evolution of screw geometry, rather than by localized sensory signals.
The correlated differences observed in ISA geometry, alignment, and pitch evolution reflect a deeper distinction in the organization of mechanical information during skilled and unskilled performance. In the proficient golfer, the convergence of ISAs and their sustained alignment with the club’s principal inertia axis indicate a symmetric coupling between rotational and translational components of motion. This coupling is preserved across time, culminating in a temporally localized pitch extremum at impact.
From a screw-theoretic perspective, such behavior is characteristic of harmonic screws, in which motion unfolds along preferred geometric directions that remain invariant under the system’s dynamics. The co-cylindrical arrangement of screws observed at impact further supports this interpretation, as cylindroid geometry represents the natural composition space of coupled twists and wrenches. In this sense, the proficient golfer’s motion preserves symmetry by maintaining a stable screw structure rather than transitioning between independent rotational and translational strategies.
These mechanical regularities correspond to what is proposed here as haptic flow: a continuous, action-generated field of inertial information arising from the lawful evolution of screw geometry. Unlike discrete feedback signals, haptic flow is specified by global invariants—such as pitch stability and ISA alignment—that remain perceptually available throughout the action. This interpretation aligns with Gibsonian ecological theory, in which skilled action is guided by information generated by movement itself rather than by internal representations or corrective commands.
In contrast, the novice golfer’s dispersed ISA distribution and highly variable pitch trajectory indicate a breakdown of this symmetry. The absence of a stable screw organization implies that rotational and translational components are not integrated into a coherent mechanical field, limiting the emergence of invariant haptic information. From an ecological standpoint, this fragmentation reduces the availability of perceivable affordances that support skilled manipulation.
Viewed through the lens of symmetry, skilled performance is therefore characterized not by greater complexity but by greater invariance: the preservation of screw-structured relationships across time and scale. The results suggest that expertise in manipulation involves the stabilization of harmonic screw modes that support continuous haptic flow, providing a unifying link between mechanics, perception, and skilled action.
4.3. Skilled vs Novice as Symmetry vs Asymmetry
Skilled golfers learn, through practice and attunement, how to generate an effective rate of translation at impact rather than attempting to control translation directly. What is learned is not an explicit manipulation of linear motion, but the coordinated production of rotational actions whose geometric arrangement yields a translational effect at the club head. This learning process is inherently perceptual: performers come to recognize and stabilize the visually perceivable displacement of the club head at impact, while the underlying angular velocities remain mechanically distributed and non-perceivable.
From the standpoint of screw theory, this observation is consistent with the classical result that a given wrench acting on a rigid body may always be replaced by another wrench of appropriate intensity acting along a different screw, provided the body is constrained to twist about a specified screw axis. In such cases, it is not the specific location or form of the applied wrench that matters, but its projection onto the admissible screw of motion. The mechanical effect on the body remains unchanged so long as this projection is preserved.
An instructive analogy may be drawn with the elementary problem of a particle constrained to move along a straight line. If two forces P and Q act on the particle at angles ℓℓ and m with respect to the direction of allowable motion, equilibrium is maintained when the projected components of the forces along that direction cancel. In both the particle and screw-theoretic cases, the system’s response is governed not by the total forces or torques applied, but by their components along the permissible direction of motion.
In the context of the golf swing, this analogy clarifies why skilled impact does not depend on precise control of individual joint torques or angular velocities. Instead, the golfer’s body–environment system self-organizes such that the combined action of multiple rotational inputs projects onto a dynamically admissible screw, producing a stable rate of translation at the club head. This projection-based organization explains how diverse motor strategies can lead to the same effective impact condition and why skilled performance exhibits robustness rather than sensitivity to local perturbations. Because projection onto an admissible screw preserves mechanical effect while discarding redundant actuation details, it also preserves perceptual invariants available to visual kinesthesis.
Crucially, this rate of translation is not regulated through feedback correction in the classical control sense. Rather, it emerges from ecological coupling between the performer and the environment, where visual kinesthesis provides direct perceptual access to the resulting translational motion. The golfer perceives the motion of the club head, not the angular causes that generate it, and adjusts action accordingly. In this way, screw-theoretic invariants provide the mechanical substrate for perceptual invariants, linking harmonic motion, visual stability, and skilled action at impact.
5. Conclusions
This study provides the first empirical evidence that haptic flow—a continuous, action-generated pattern of mechanical information—can be directly quantified using screw-theoretic invariants. By comparing proficient and novice golfers, we demonstrated that skilled manipulation is not defined by precise trajectory reproduction, but by the ability to stabilize symmetry-bearing structures in the coupled body–object system.
Three convergent signatures of skilled performance were identified. First, proficient golfers exhibited geometric symmetry in the organization of instantaneous screw axes, reflected in smooth striction curves and coherent alignment with the club’s principal inertia axis. Second, screw pitch was stabilized across the critical phase of downswing and impact, revealing pitch as an invariant coupling rotational and translational components of motion. Third, the overall evolution of the screw system progressed coherently toward impact, consistent with harmonic screw dynamics in which inertial and potential effects remain conjugate.
Together, these results support a symmetry-based view of motor skill in which performance emerges from the regulation of invariant mechanical relationships rather than from localized feedback or explicit control of degrees of freedom. Interpreted within a Gibsonian framework, haptic flow—expressed through the evolution of ISA geometry and pitch—constitutes a perceivable affordance that specifies the performer’s own action in real time.
More broadly, this work positions screw theory as a unifying framework for studying symmetry and asymmetry in human movement. By revealing how symmetry is enacted, perceived, and exploited in skilled action, the present findings contribute directly to the aims of this Special Issue and suggest new directions for research in motor learning, rehabilitation, and human–machine interaction, where the stabilization of haptic flow may serve as a principled target for assessment and intervention.
Funding
This research was funded by PROCIENCIA, grant number No. PE501080681-2022-PROCIENCIA Proyectos Especiales: Proyectos de Investigadores Visitantes.
Institutional Review Board Statement
The study was conducted in accordance with the Declaration of Helsinki. Ethical review and approval were waived for this study due to its non-invasive, observational nature and the research regulations in Portugal at the time of data collection in 2011. Nevertheless, all participants provided written informed consent prior to participation.
Data Availability Statement
The data presented in this study are available upon request from the corresponding author. The original contributions presented in this study are included in the article. Further inquiries can be directed to the corresponding author.
Acknowledgments
The authors would like to acknowledge Miwon Kim, Sofia Camacho, and Jorge Infante for their help during data acquisition for this study. The first author would also like to thank Sangdo Kim for his stimulating discussions regarding the perfection of the golf swing. This research was funded by PROCIENCIA under contract No. PE501080681-2022-PRO-CIENCIA Proyectos Especiales: Proyectos de Investigadores Visitantes.”
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Bernstein, N.A. The problem of interrelation between coordination and localization. Arch Biol Sci 1935, 38, 1–35. [Google Scholar]
- Gibson, J. The senses considered as perceptual systems; Houghton: Boston, 1966. [Google Scholar]
- Gibson, J. The ecological approach to visual perception; Houghton Mifflin, 1979. [Google Scholar]
- Bernstein, N. The coordination and regulation of movements. (No Title) 1967.
- Kelso, J.S. Dynamic patterns: The self-organization of brain and behavior; MIT press, 1995. [Google Scholar]
- Sadeghi, H. Local or global asymmetry in gait of people without impairments. Gait & posture 2003, 17, 197–204. [Google Scholar]
- Patterson, K.K.; Gage, W.H.; Brooks, D.; Black, S.E.; McIlroy, W.E. Evaluation of gait symmetry after stroke: a comparison of current methods and recommendations for standardization. Gait & posture 2010, 31, 241–246. [Google Scholar]
- Ferris, D.P.; Farley, C.T. Interaction of leg stiffness and surface stiffness during human hopping. Journal of applied physiology 1997, 82, 15–22. [Google Scholar] [CrossRef] [PubMed]
- McMahon, T.A.; Cheng, G.C. The mechanics of running: how does stiffness couple with speed? Journal of biomechanics 1990, 23, 65–78. [Google Scholar] [CrossRef] [PubMed]
- Kim, W.; João, F.; Mota, P.; Aguiar, L.; Veloso, A. NATURAL SHOCK ABSORPTION OF THE LEG SPRING. Journal of Biomechanics 2012, 45, S221. [Google Scholar] [CrossRef]
- Ball, R. A treatise on the theory of screws; Cambridge University Press, 1900. [Google Scholar]
- Davidson, J.; Hunt, K. Robots and screw theory: applications of kinematics and statics to robotics; Oxford University Press, 2004. [Google Scholar]
- Hunt, K.H. Kinematic geometry of mechanism; Clarendon Press: Oxford, 1990. [Google Scholar]
- Kim, W.; Veloso, A.; Araújo, D.; Machado, M.; Vleck, V.; Aguiar, L.; Cabral, S.; Vieira, F. Haptic Perception-Action Coupling Manifold of Effective Golf Swing. International Journal of Golf Science 2013, 2, 10–32. [Google Scholar] [CrossRef]
- Shaw, R.E.; Turvey, M. Ecological foundations of cognition. II: Degrees of freedom and conserved quantities in animal-environment systems. Journal of Consciousness Studies 1999, 6, 111–124. [Google Scholar]
- Myers, T.W. Anatomy trains: myofascial meridians for manual and movement therapists; Elsevier Health Sciences, 2009. [Google Scholar]
- Huijing, P.A. Myofascial force transmission. In Encyclopedia of Exercise Medicine in Health and Disease; Springer, 2012; pp. 617–617. [Google Scholar]
- Kiat Teu, K.; Kim, W. Estimation of the axis of a screw motion from noisy data–a new method based on Plucker lines. J Biomech 2006, 39, 2857–62. [Google Scholar] [CrossRef] [PubMed]
- Ciblak, N. Analysis of Cartesian stiffness and compliance with applications; Georgia Institute of Technology, 1998. [Google Scholar]
- Crane, C.D., III; Griffis, M.; Duffy, J. Screw theory and its application to spatial robot manipulators; Cambridge University Press, 2022. [Google Scholar]
- Dooner, D. Kinematic geometry of gearing; 2012. [Google Scholar]
- Hunt, K.H. Special configurations of robot-arms via screw theory. Robotica 1986, 4, 171–179. [Google Scholar] [CrossRef]
- Phillips, J. Freedom in machinery; Cambridge University Press, 2007; Vol. 1. [Google Scholar]
- Kim, W.; Araujo, D.; Kohles, S.S.; Kim, S.G.; Alvarez Sanchez, H.H. Affordance-Based Surgical Design Methods Considering Biomechanical Artifacts. Ecological Psychology 2021, 33, 57–71. [Google Scholar] [CrossRef] [PubMed]
- Kim, W.; Araujo, D.; Choi, M.; Vette, A.; Ortiz, E. Algorithmic implementation of visually guided interceptive actions: Harmonic ratios and stimulation invariants. Algorithms 2024, 17, 277. [Google Scholar] [CrossRef]
Figure 1.
(a) Fiber tractography of a portion of the lateral gastrocnemius muscle, illustrating a distributed manifold of individual muscle fibers under tension. (b) Conceptual abstraction of this manifold as an instantaneous screw and its perpendicular pole q, representing coupled rotational and translational effects of muscular tension.
Figure 1.
(a) Fiber tractography of a portion of the lateral gastrocnemius muscle, illustrating a distributed manifold of individual muscle fibers under tension. (b) Conceptual abstraction of this manifold as an instantaneous screw and its perpendicular pole q, representing coupled rotational and translational effects of muscular tension.
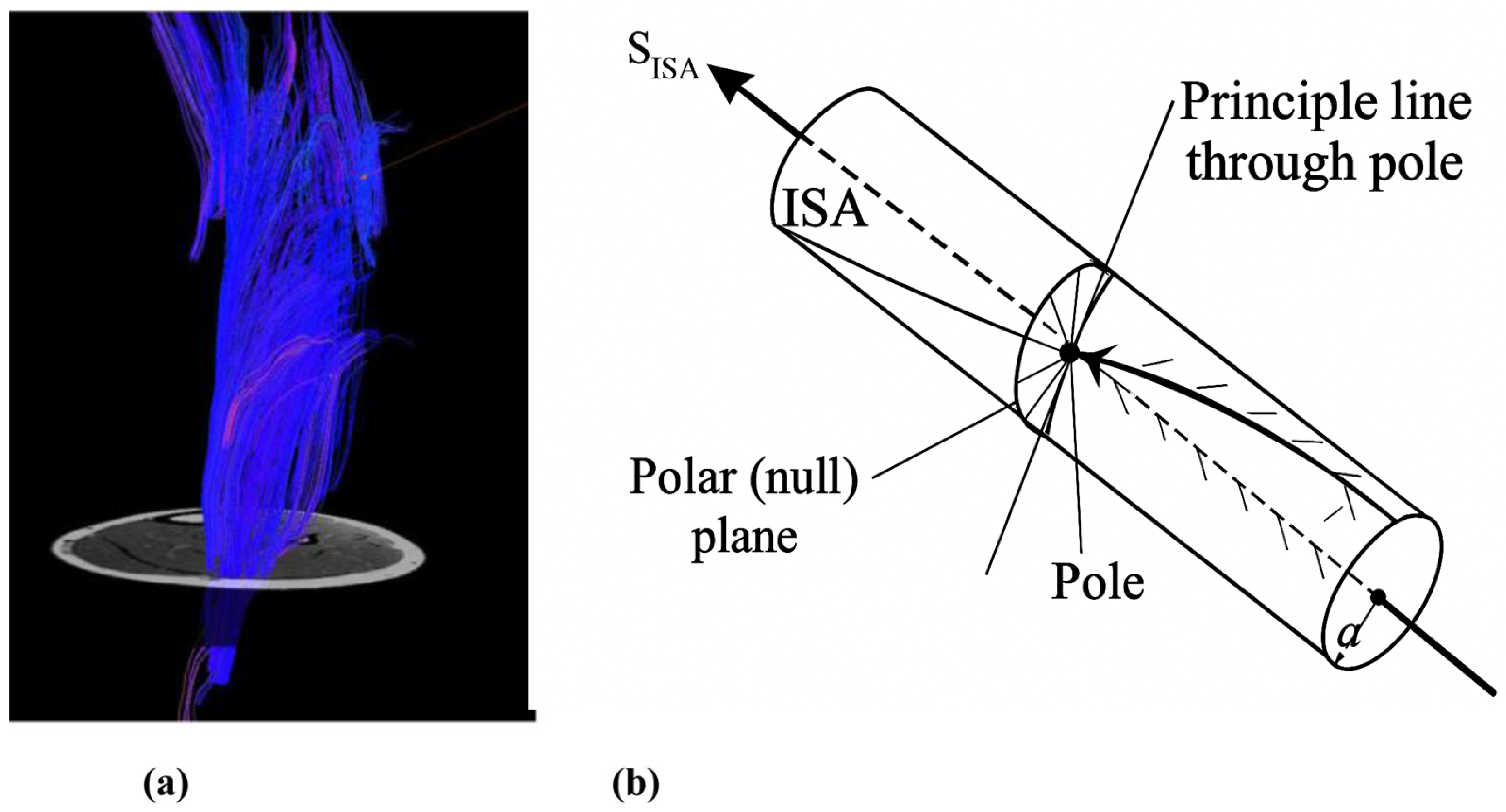
Figure 2.
Screw-based representation of coupled rotational and translational motion and its relation to haptic flow. (Left) Classical helical motion generated by a rigid body rotating about an axis with angular velocity and translating with pitch h, illustrating the geometric coupling inherent to screw motion. (Right) Decomposition of local point velocities along a curved trajectory into tangential and translational components relative to the instantaneous screw. The sequence of velocity vectors (–) demonstrates how rotational and translational components evolve coherently along the motion path. Within the present framework, this evolving velocity field constitutes haptic flow: a structured force–moment information field generated by action and specified relative to the instantaneous screw, rather than isolated kinematic vectors.
Figure 2.
Screw-based representation of coupled rotational and translational motion and its relation to haptic flow. (Left) Classical helical motion generated by a rigid body rotating about an axis with angular velocity and translating with pitch h, illustrating the geometric coupling inherent to screw motion. (Right) Decomposition of local point velocities along a curved trajectory into tangential and translational components relative to the instantaneous screw. The sequence of velocity vectors (–) demonstrates how rotational and translational components evolve coherently along the motion path. Within the present framework, this evolving velocity field constitutes haptic flow: a structured force–moment information field generated by action and specified relative to the instantaneous screw, rather than isolated kinematic vectors.
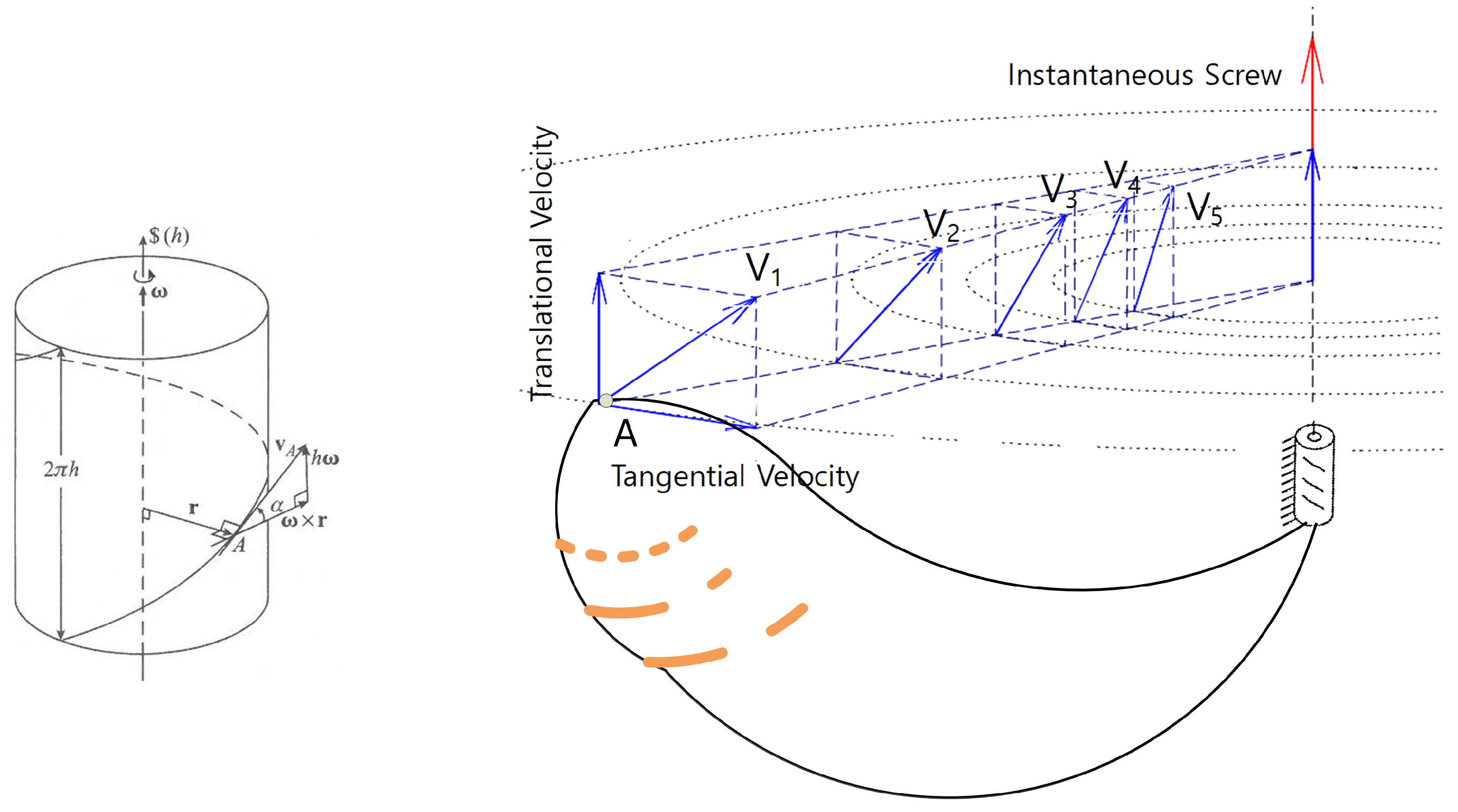
Figure 3.
Geometric organization of force–moment relations underlying haptic flow expressed as a screw system. A force applied at different points (P, Q) generates corresponding moments (, , ), whose combined effect defines a wrench aligned with the instantaneous screw. The spatial distribution of these wrenches forms a coherent screw field rather than independent force vectors. In the context of haptic flow, this screw-aligned wrench field represents the perceptual–mechanical information generated during movement, specifying stability and motion through invariant force–moment coupling rather than through localized force measurements.
Figure 3.
Geometric organization of force–moment relations underlying haptic flow expressed as a screw system. A force applied at different points (P, Q) generates corresponding moments (, , ), whose combined effect defines a wrench aligned with the instantaneous screw. The spatial distribution of these wrenches forms a coherent screw field rather than independent force vectors. In the context of haptic flow, this screw-aligned wrench field represents the perceptual–mechanical information generated during movement, specifying stability and motion through invariant force–moment coupling rather than through localized force measurements.
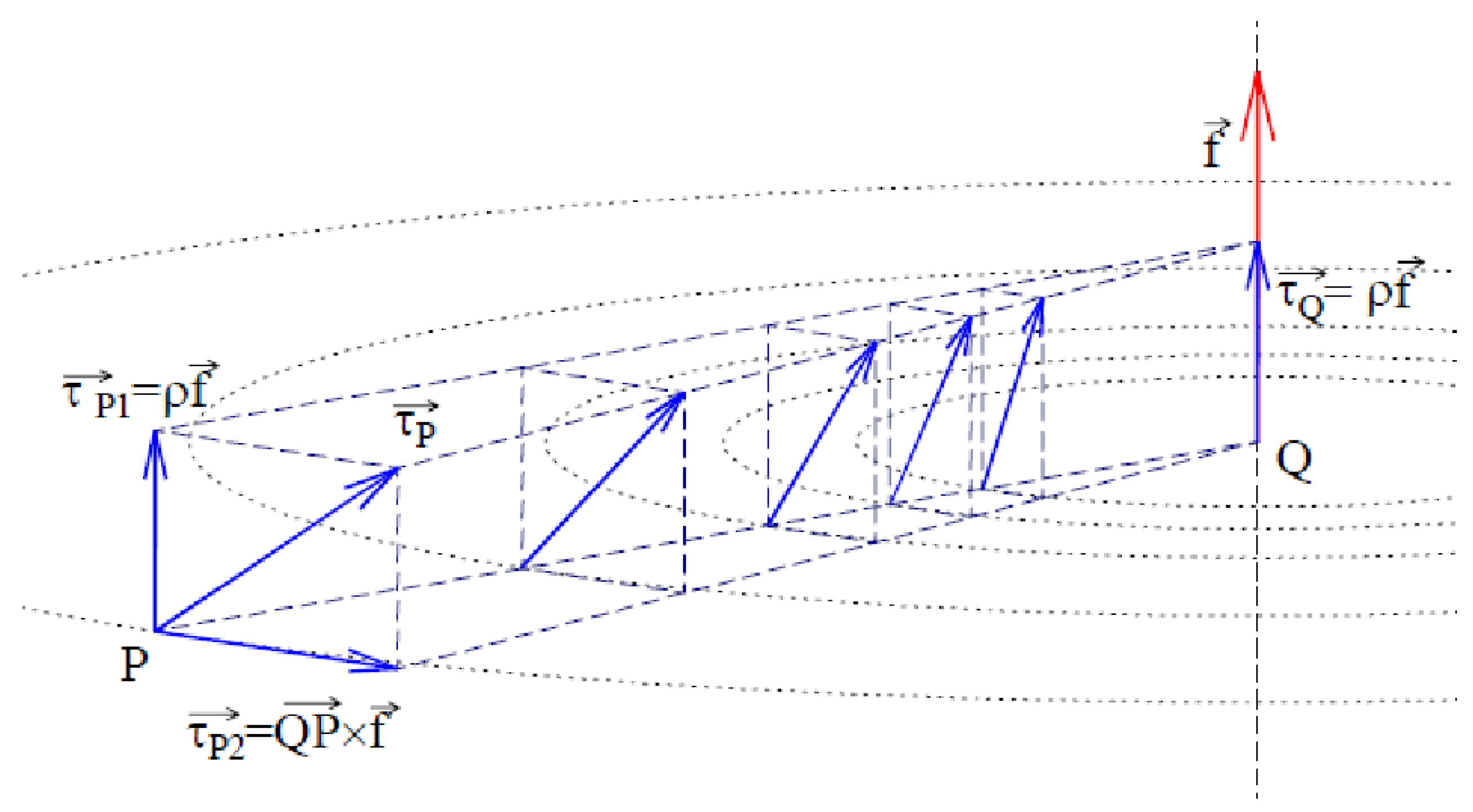
Figure 4.
A club has a mass m; its center of mass, denoted , is specified by the position vector ; and the inertia tensor about its center of mass is . The club is initially at rest and experiences a force acting along a line passing through the center of mass, together with a couple . The resulting motion is characterized by an angular acceleration about an axis passing through , and a linear acceleration of the center of mass (units in .
Figure 4.
A club has a mass m; its center of mass, denoted , is specified by the position vector ; and the inertia tensor about its center of mass is . The club is initially at rest and experiences a force acting along a line passing through the center of mass, together with a couple . The resulting motion is characterized by an angular acceleration about an axis passing through , and a linear acceleration of the center of mass (units in .
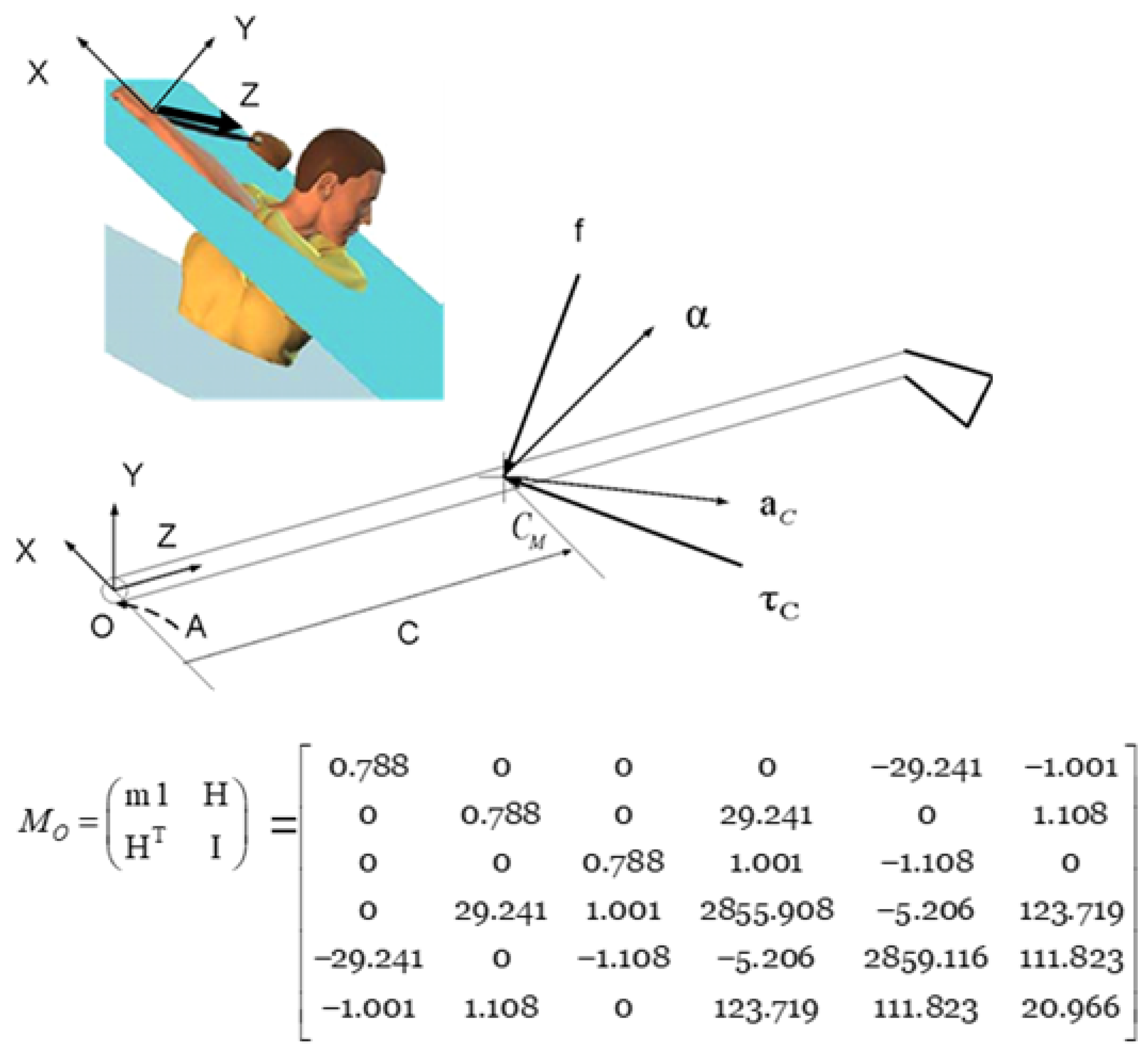
Figure 5.
Cylindroid with one screw of infinite pitch. Geometric construction illustrating the special case in which one constituent screw has infinite pitch. The vertical line OP represents a screw of finite pitch p, while the dashed horizontal line OS corresponds to a screw of infinite pitch, producing pure translation. The resultant screw OR, inclined at angle , lies on the cylindroid generated by compounding these two screws. This configuration demonstrates how pure translation can emerge transiently from the symmetric composition of opposing screw actions, providing the geometric basis for the applied rate of translation observed at impact.
Figure 5.
Cylindroid with one screw of infinite pitch. Geometric construction illustrating the special case in which one constituent screw has infinite pitch. The vertical line OP represents a screw of finite pitch p, while the dashed horizontal line OS corresponds to a screw of infinite pitch, producing pure translation. The resultant screw OR, inclined at angle , lies on the cylindroid generated by compounding these two screws. This configuration demonstrates how pure translation can emerge transiently from the symmetric composition of opposing screw actions, providing the geometric basis for the applied rate of translation observed at impact.
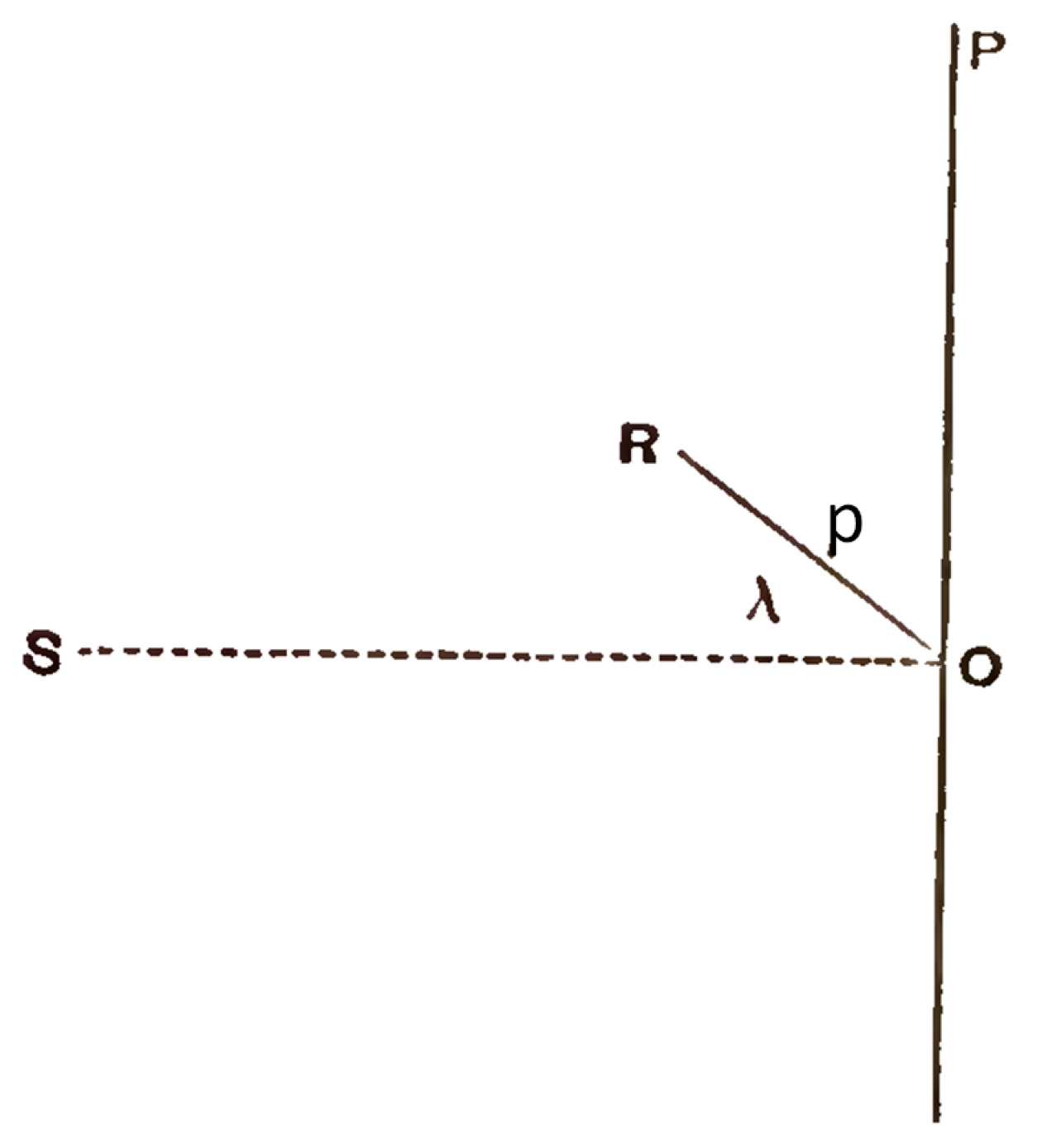
Figure 6.
Planar construction of a cylindroid generated by the composition of a screw of finite pitch with a screw of infinite pitch, illustrating the linear variation of pitch across parallel screws.
Figure 6.
Planar construction of a cylindroid generated by the composition of a screw of finite pitch with a screw of infinite pitch, illustrating the linear variation of pitch across parallel screws.
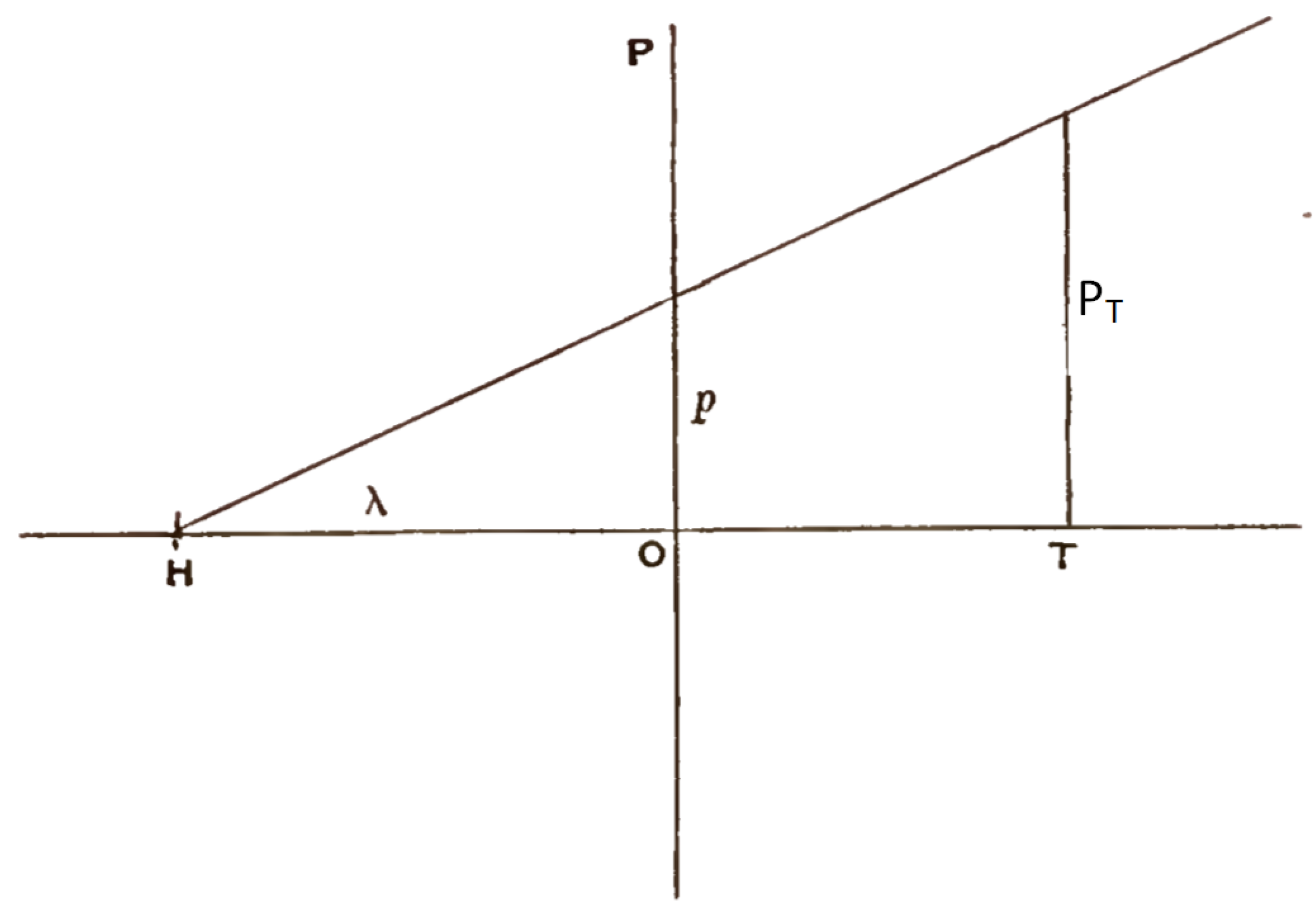
Figure 7.
trajectories for the proficient golfer. The helical structure of the screw axes indicates stable coupling of rotational and translational motion during the downswing. Here, denotes the principal axis of the club’s inertia tensor, representing its dominant rotational direction. Comparison with the ISA illustrates the degree of alignment between the club’s inertial properties and the actual screw axis of motion during the downswing
Figure 7.
trajectories for the proficient golfer. The helical structure of the screw axes indicates stable coupling of rotational and translational motion during the downswing. Here, denotes the principal axis of the club’s inertia tensor, representing its dominant rotational direction. Comparison with the ISA illustrates the degree of alignment between the club’s inertial properties and the actual screw axis of motion during the downswing
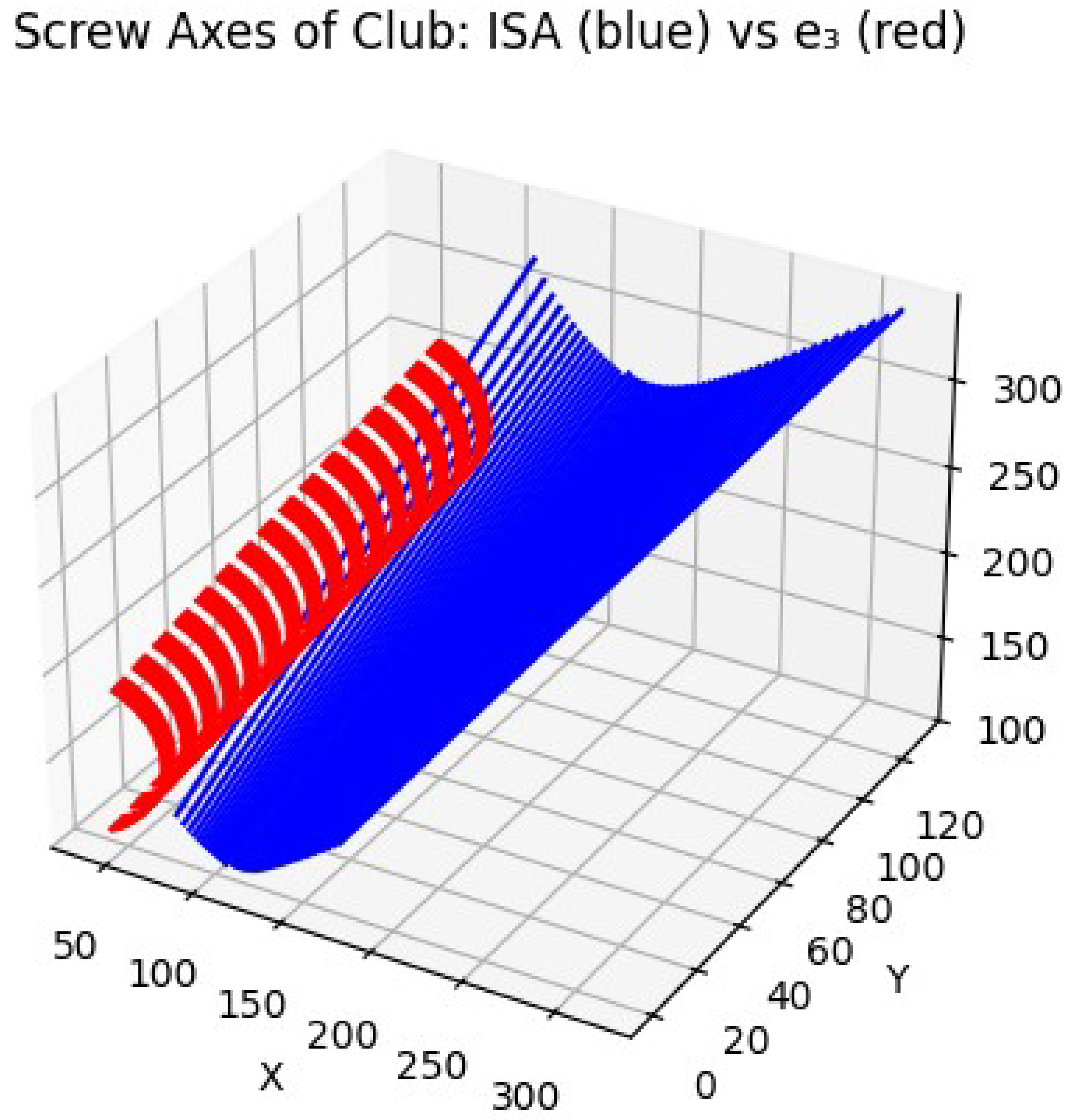
Figure 8.
trajectories for the novice golfer. Discontinuities and spatial disorganization of the screw axes reflect unstable motion coordination. Here, denotes the principal axis of the club’s inertia tensor, representing its dominant rotational direction. Comparison with the ISA illustrates the degree of alignment between the club’s inertial properties and the actual screw axis of motion during the downswing.
Figure 8.
trajectories for the novice golfer. Discontinuities and spatial disorganization of the screw axes reflect unstable motion coordination. Here, denotes the principal axis of the club’s inertia tensor, representing its dominant rotational direction. Comparison with the ISA illustrates the degree of alignment between the club’s inertial properties and the actual screw axis of motion during the downswing.
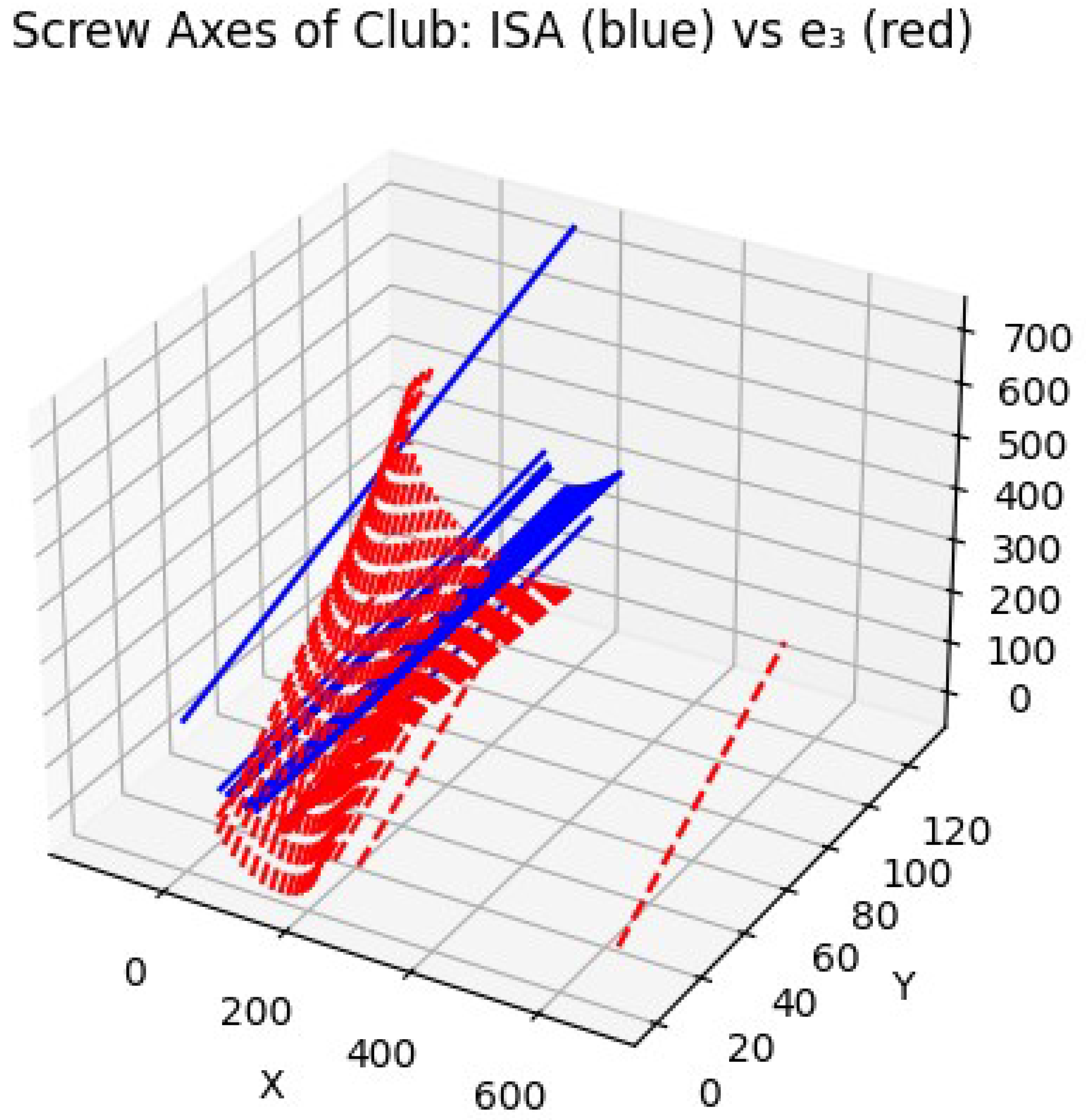
Figure 9.
Time evolution of screw pitch during the downswing and impact phases for a proficient (blue) and a novice (red) golfer. The proficient golfer exhibits a smooth, low-variance pitch trajectory with a stable extremum near impact, whereas the novice golfer shows irregular fluctuations, indicating unstable rotational–translational coupling.
Figure 9.
Time evolution of screw pitch during the downswing and impact phases for a proficient (blue) and a novice (red) golfer. The proficient golfer exhibits a smooth, low-variance pitch trajectory with a stable extremum near impact, whereas the novice golfer shows irregular fluctuations, indicating unstable rotational–translational coupling.
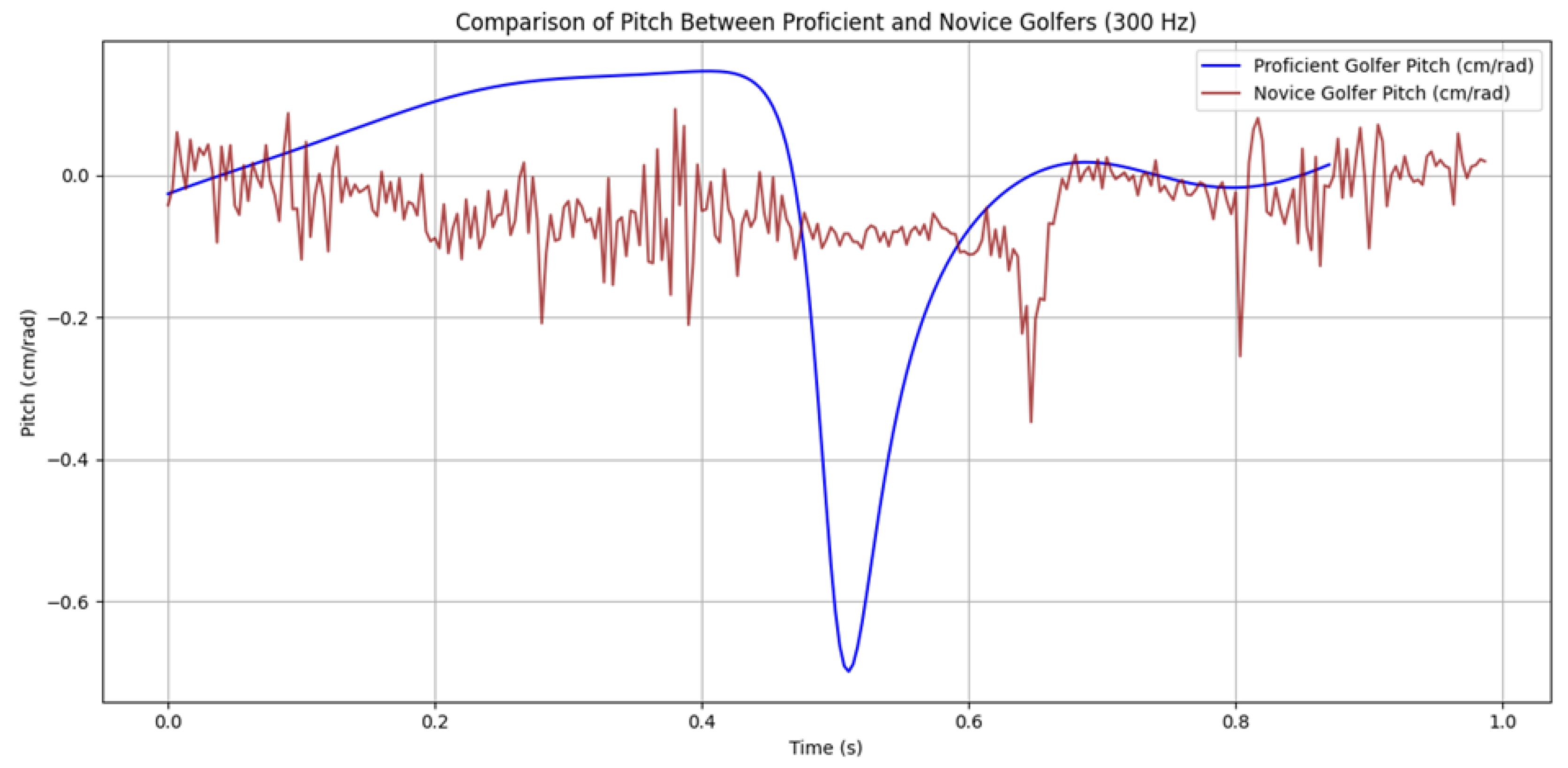
Figure 10.
Striction curves of the instantaneous screw axis (ISA) ruled surface for (A) a proficient golfer and (B) a novice golfer. The striction curve represents the locus of central points of the ISA surface over time. The proficient golfer exhibits a smooth, continuous striction curve extending from early downswing through impact and into the follow-through, whereas the novice golfer shows a shorter, irregular curve with clustering and abrupt curvature changes near impact. Proficient performance is characterized by coherent ISA– organization and geometric continuity, while novice performance displays pronounced asymmetry and reduced spatial coherence.
Figure 10.
Striction curves of the instantaneous screw axis (ISA) ruled surface for (A) a proficient golfer and (B) a novice golfer. The striction curve represents the locus of central points of the ISA surface over time. The proficient golfer exhibits a smooth, continuous striction curve extending from early downswing through impact and into the follow-through, whereas the novice golfer shows a shorter, irregular curve with clustering and abrupt curvature changes near impact. Proficient performance is characterized by coherent ISA– organization and geometric continuity, while novice performance displays pronounced asymmetry and reduced spatial coherence.
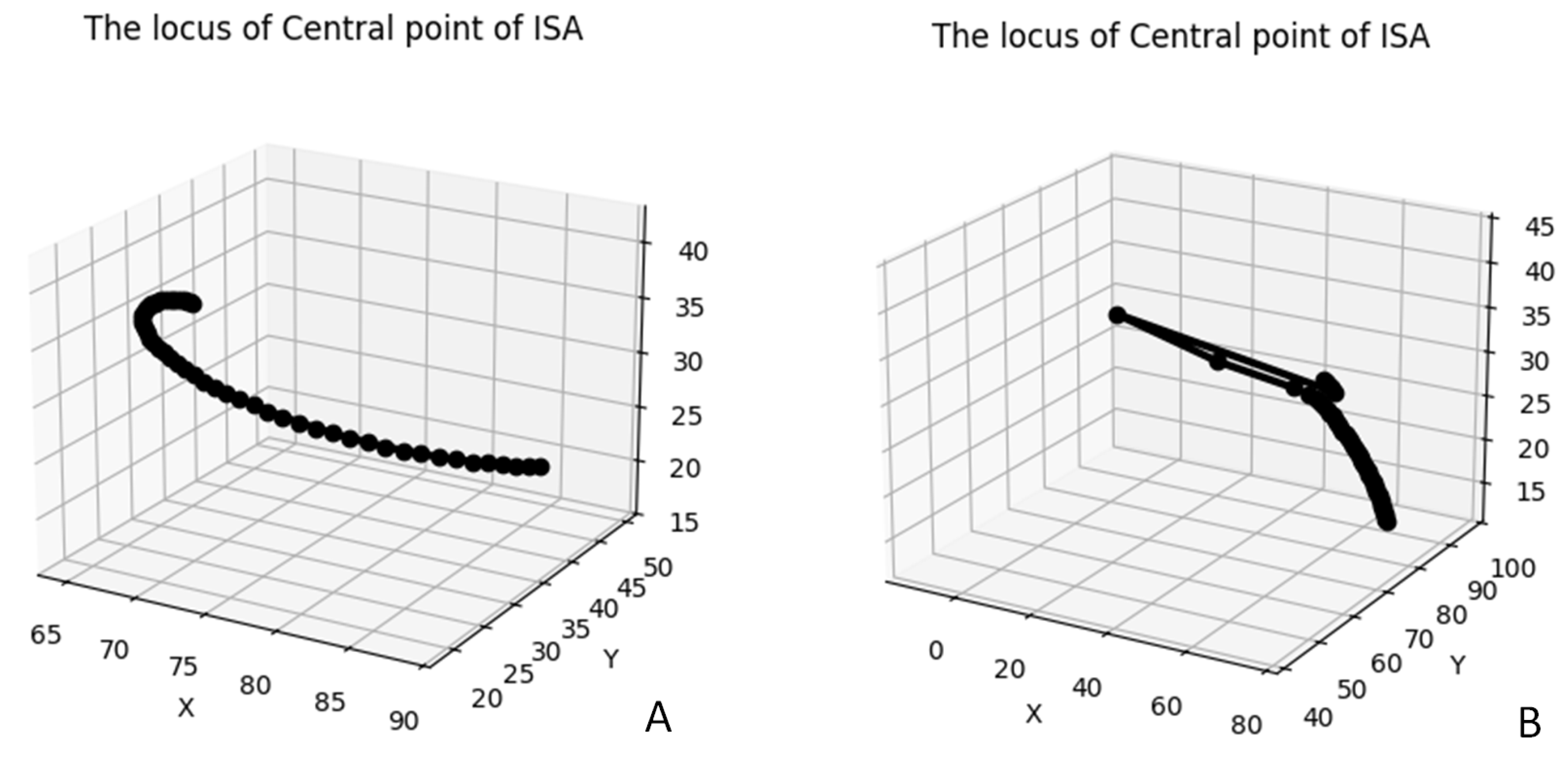
Figure 11.
Harmonic screws and cylindroid geometry underlying translational motion at impact. This figure illustrates the mechanical origin of pure translation generated by a couple of equal, parallel, and opposite angular velocities applied at a finite separation d. Two parallel shafts impose angular velocities and of equal magnitude and opposite direction, producing a uniform field of linear velocities
Figure 11.
Harmonic screws and cylindroid geometry underlying translational motion at impact. This figure illustrates the mechanical origin of pure translation generated by a couple of equal, parallel, and opposite angular velocities applied at a finite separation d. Two parallel shafts impose angular velocities and of equal magnitude and opposite direction, producing a uniform field of linear velocities
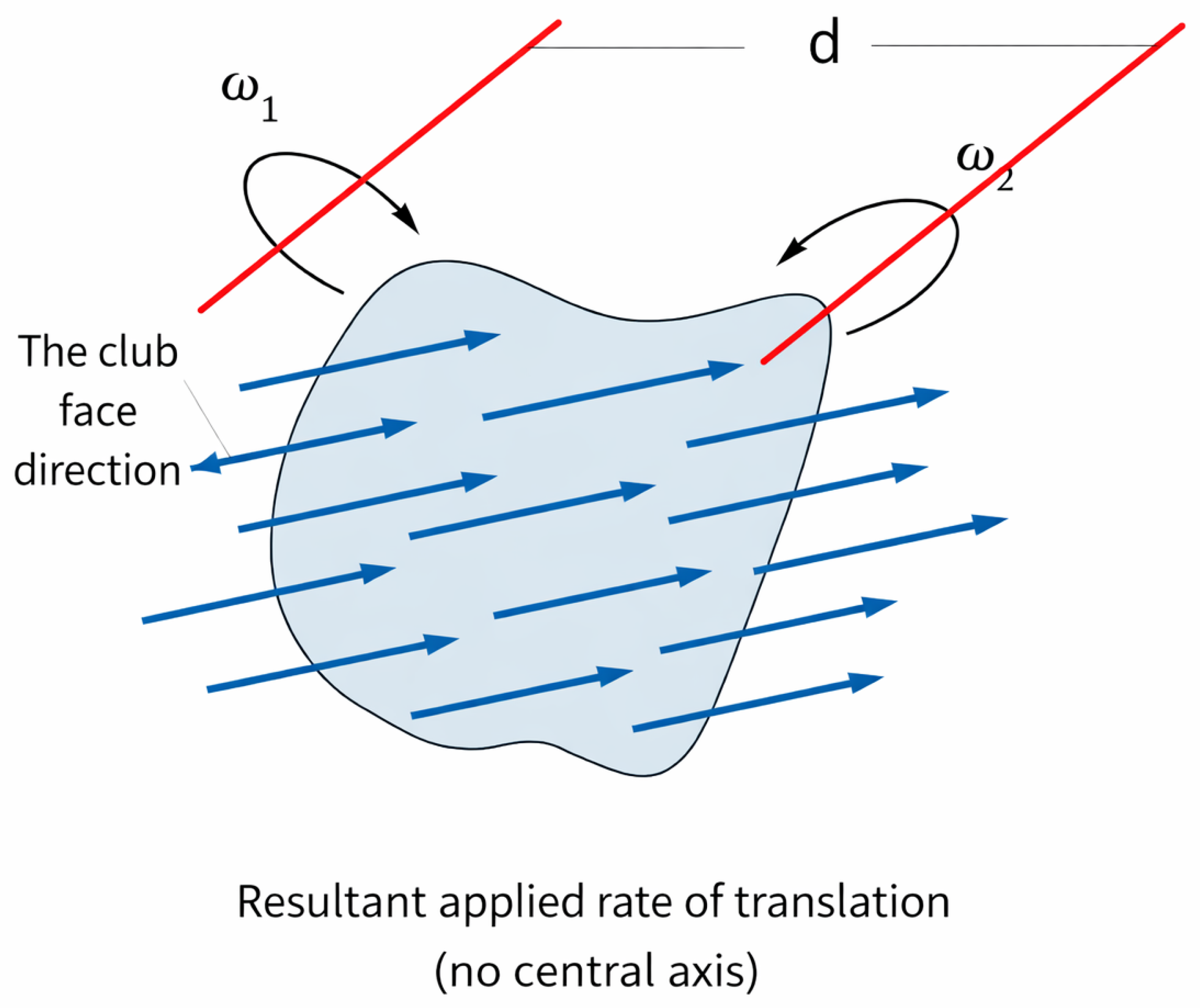

Table 1.
Participant demographics and golfing background. Key performance indicators include age, height, mass, years of experience, and golf handicap.
Table 1.
Participant demographics and golfing background. Key performance indicators include age, height, mass, years of experience, and golf handicap.
| Participant | Age (Years) | Height (cm) | Mass (kg) | Handicap | Experience (Years) | Rounds/Year |
|---|---|---|---|---|---|---|
| Proficient Golfer (A) | 17 | 167 | 54 | 32 | 1 | 10 |
| Novice Golfer (B) | 51 | 165 | 55 | 8 | 15 | 110 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



