
Submitted:
30 January 2026
Posted:
02 February 2026
You are already at the latest version
Abstract
We formulate and benchmark an operational timescale—the quantum information copy time—that quantifies how rapidly a localized bias in an initial many-body state becomes remotely certifiable using measurements restricted to a distant receiver region. The definition is intrinsically information-theoretic: for a fixed distinguishability threshold \eta \in (0,1), the copy time \tau_{\mathrm{copy}}(A \to B; \eta) is the earliest time at which the reduced states on B become distinguishable with advantage at least \eta, quantified by the trace distance and equivalently by the optimal Helstrom measurement. We present (i) a minimal theorem that isolates the genuinely nontrivial ingredients—locality, conservation laws, and an explicit receiver-observable class—and (ii) a controlled hydrodynamic closure in which the copy time is governed by a second-moment spectral susceptibility that ties the receiver advantage to the slowest transport mode. We then provide reproducible exact-diagonalization benchmarks in the XXZ chain that (a) extract finite-size transport diagnostics with conservative uncertainty quantification and (b) delineate failure modes in integrable and near-integrable regimes. TEBD/MPS calculations are included only as qualitative cross-checks (Supplementary File S1) and are not used to support asymptotic scaling claims. Finally, we include a brief, clearly separated outlook on how locality-preserving quantum cellular automata (QCA) and code-subspace constraints might shape operational copy-time distances; this material is explicitly conjectural and is not used in any theorem, bound, or numerical claim.
Keywords:
quantum information
; state discrimination
; trace distance
; hydrodynamics
; quantum cellular automata
; Lieb–Robinson bounds
; diffusion
; operational timescales
Introduction
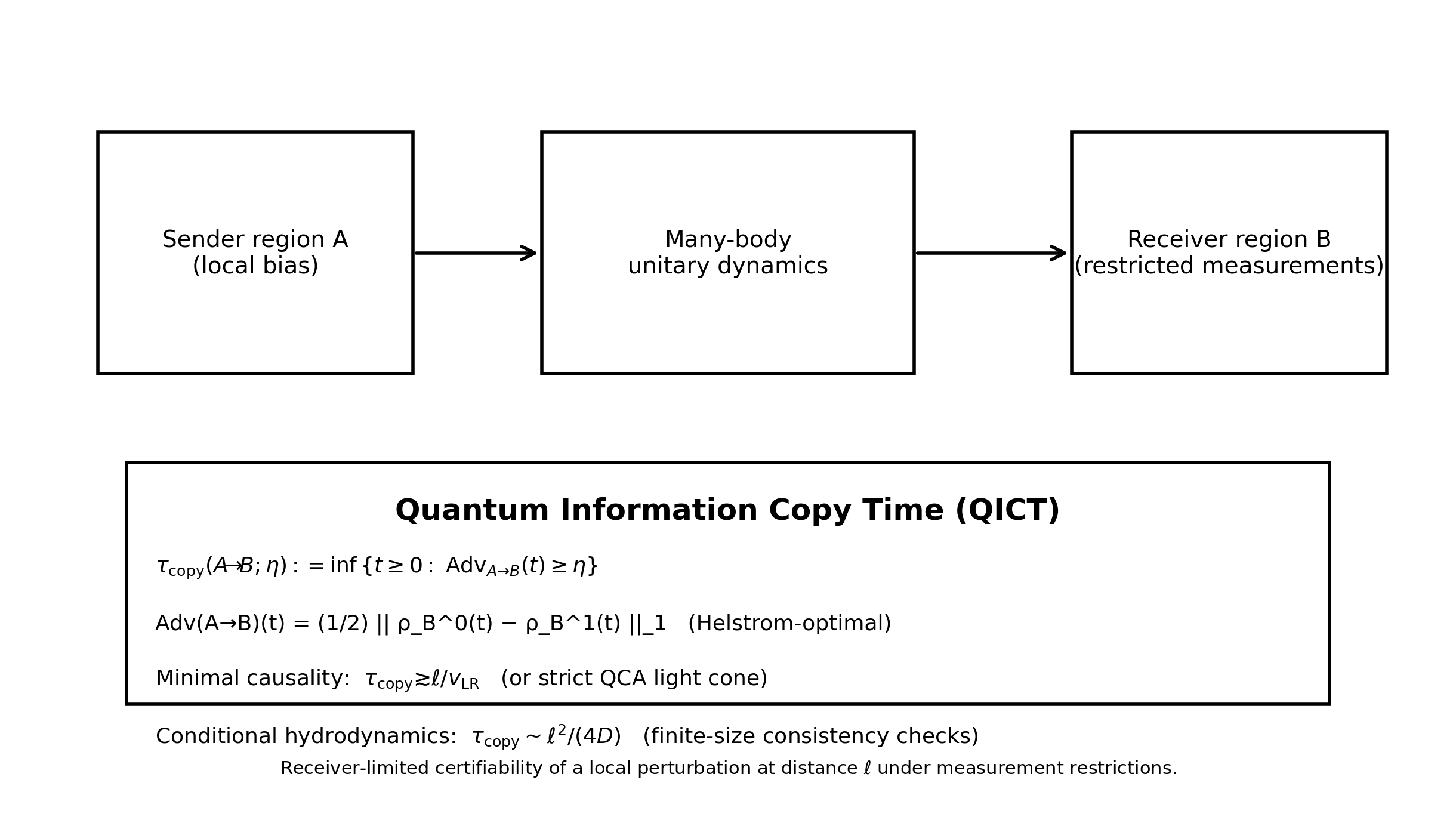
The purpose of this paper is twofold. First, we define and analyze a concrete, operational timescale for information propagation in many-body quantum dynamics: the quantum information copy time (QICT). Second, we use this operational object as a micro-level input to a broader, programmatic research direction that aims to connect microscopic locality-preserving unitary dynamics to macroscopic transport, and ultimately to effective causal structure.
The copy time is designed to avoid two common ambiguities. (i) It is not a proxy for “scrambling” in the OTOC sense; rather it measures remote certifiability by a receiver restricted to a spatial region and an admissible measurement class. (ii) It is not tied to a particular coarse-graining scheme: the definition is strictly in terms of quantum hypothesis testing (Helstrom–Holevo theory) on reduced density operators.
To make the scope and logical dependencies explicit, we separate the paper into three layers:
- Operational layer (fully general). Definitions and inequalities that hold for arbitrary finite-dimensional quantum systems and any unitary (or CPTP) dynamics.
- Hydrodynamic closure layer (assumptions explicit). A theorem that relates copy time to transport parameters under a verifiable single-mode window and an explicit projection formalism.
- Programmatic outlook (conjectural). A QCA / code-subspace motivated picture in which copy-time distances define an operational geometry and provide a “currency” for certifying macroscopic invariants. This part is clearly labelled as outlook and is not used to justify any of the rigorous claims.
What is new here (and what is not).
The QICT object is a task-defined latency: it asks when a receiver restricted to region can certify a localized perturbation in with fixed advantage . This differs from (i) operator-growth and
scrambling diagnostics (e.g., OTOCs), which probe the fastest-growing sector,
and from (ii) “light-cone” statements that bound when influence can begin
but do not identify the bottleneck controlling a concrete receiver task
in the presence of conservation laws. In particular, the same dynamics can
exhibit rapid operator spreading while the receiver-limited certifiability
is dominated by the slowest conserved mode (Section
6; Proposition [prop:separation]).
Meaning of “operational”.
Throughout, “operational” means defined via
hypothesis testing (Helstrom discrimination) on reduced states.
Experimental accessibility depends on the admissible measurement class:
Helstrom measurements may be highly nonlocal on , so we also study physically motivated
restrictions (moment-/few-body channels) and state explicitly where such
restrictions enter the logic.
Scope and non-claims (editor-facing).
To avoid any over-interpretation, we state
explicitly what this manuscript does not claim. (i) We do not claim that
the hydrodynamic theorem holds in all many-body systems; it is a conditional
closure under diagnostically checkable hypotheses (fast-sector mixing, isolated
slow pole, and nonzero receiver overlap). (ii) We do not claim numerical
confirmation of asymptotic distance scaling; the ED results at provide finite-size consistency checks and
illustrate failure modes, but do not extract an infinite-volume diffusion
constant. (iii) We do not claim experimental implementability of
Helstrom-optimal measurements; where physical accessibility matters, we
restrict the receiver to explicit measurement classes and make the resulting
loss of optimality transparent.
Related work and positioning.
State discrimination and optimal measurements
follow Helstrom and Holevo [1,2]; locality
constraints follow Lieb–Robinson-type bounds [3,4];
and unitary dynamics with conservation laws can generate dissipative
hydrodynamics (diffusive poles) at the level of operators and correlators [5,6,7]. The diagnostic we emphasize differs from
OTOCs and from entanglement growth: copy time is a receiver-limited
operational latency, and its scaling can be dominated by conserved-mode
transport even when scrambling is fast. In relation to information-theoretic
“influence” measures, QICT is closest in spirit to receiver-restricted
distinguishability: it is the trace distance between reduced states on , i.e., the best possible binary decision rule
available to the receiver [1,2]. What is
emphasized here is not the existence of influence (which locality bounds
already constrain), but the latency of a concrete certification task at
fixed advantage under explicit receiver restrictions. This task perspective
makes it straightforward to incorporate realistic measurement classes
(few-body/moment channels) and to isolate situations where conserved-mode
transport, rather than operator growth, sets the dominant timescale.
Operational Definition and Preliminaries
Copy Time as Receiver-Limited Hypothesis Testing
Let and be two initial global states on a finite lattice
that differ only inside a sender region (e.g., a local “tilt” in a conserved charge). Let denote the time-evolution channel (unitary or
CPTP), and let be the evolved states. For a receiver region , define the reduced states .
For a fixed threshold , the receiver advantage is
and the copy time is
By Helstrom’s theorem, is the optimal bias over random guessing for
discriminating vs. with equal priors; equivalently it is the dual
norm over observables . We use for trace distance.
Elementary Bounds and Caveats
We record two standard inequalities used later. The
first is a direct duality bound.
This identity is standard in quantum hypothesis
testing and is included only to fix notation. For any Hermitian and any observable with ,
In particular,
The second is Pinsker’s inequality. We state the
required support condition explicitly.
If is full rank (so that for all ), then
If is not full rank, the inequality remains valid
provided ; otherwise and [eq:pinsker] is vacuous.
In all numerical benchmarks reported below we work
in finite-dimensional Hilbert spaces (finite spin chains) and, where thermal
reference states are invoked, at finite inverse temperature ; consequently the reduced density matrices
encountered are effectively full rank (up to machine precision), and Lemma [lem:pinsker]
is used only in this non-vacuous regime.
Minimal Locality Bounds and What Is Genuinely Nontrivial
Locality-Preserving Dynamics and Lieb–Robinson Constraints
Throughout, we assume a lattice with a metric , and we denote the distance between regions by . For continuous-time local Hamiltonians or for
locality-preserving circuits/QCAs, the standard consequence is a
Lieb–Robinson-type bound: a local perturbation cannot influence distant
observables faster than a finite velocity , up to exponentially small tails.
We deliberately do not conflate different
settings. When we refer to LR bounds, we mean either (i) a continuous-time
Hamiltonian/Lindbladian LR bound with constants or (ii) a circuit/QCA strict light cone. In each
case, the structure is an upper bound on commutators of evolved local
observables.
Let be the evolution channel (unitary or CPTP) on a
lattice with metric . Assume one of the following standard locality
structures for Heisenberg-evolved observables.
(H) Continuous-time Hamiltonian/Lindbladian
(Lieb–Robinson tails). There exist constants such that for any observables supported on a finite region and supported on ,
(C) Discrete-time range- circuits / reversible QCAs (strict light cone).
For each integer time , the Heisenberg image of a local algebra satisfies
Let the initial pair differ only inside a sender region and satisfy . Then for any receiver region and any time :
- (H) For local Hamiltonian evolution satisfying a Lieb–Robinson bound, the receiver advantage is bounded by [eq:lr_finish] outside the effective cone.
- (C) For range- circuits or reversible QCAs, the strict light cone implies whenever .
In particular, in both settings the copy time obeys
the kinematic lower bound
In case (H), the prefactor comes from the standard LR “localization” estimate
[eq:lr_localization] (denoted in the proof) and is independent of except through bounded region-size factors. The
only scaling content of [eq:lr_tau_lower] is therefore the kinematic term and the mild logarithmic threshold correction.
Theorem [thm:lr_upper] is an upper bound on
how early copy can occur; it does not provide a mechanism for achieving at times . For an A-level contribution, the hard part is a lower
bound (or matching scaling) in physically relevant regimes. This is
precisely where conservation laws and hydrodynamics enter.
Conservation Laws and an Explicit Receiver Class
Fix a (quasi-)local conserved charge with . We will focus on initial perturbations that are
“charge-biased” in . Importantly, the receiver need not have access to
all observables on ; in realistic settings one often restricts to a
class (e.g., low moments of charge, or few-body
observables).
To avoid circularity, we proceed in two steps: (i)
we provide a theorem under minimal hypotheses that yields a general
lower bound in terms of an explicitly defined susceptibility-like object, and
(ii) we identify an additional single-mode hydrodynamic window under
which that object becomes computable from transport data.
Hydrodynamic Closure: From Charge Bias to Spectral Susceptibility
Notation used in the hydrodynamic closure
section.
| Symbol | Meaning |
| Liouvillian superoperator (for closed systems) | |
| Mori projection onto the slow manifold and its complement | |
| Kubo–Mori inner product induced by the reference state | |
| Markovianized effective slow-sector generator (Eq. [eq:Leff]) | |
| Second-moment spectral susceptibility (Definition [def:chi2]) | |
| Receiver observable restricted to the slow sector | |
| Fast-sector mixing gap controlling memory decay (assumption) |
Setup: local equilibrium manifold and linearization
Let be a reference Gibbs (or generalized Gibbs) state
at inverse temperature . Consider a small sender perturbation of “chemical
potential” type,
where and . To leading order in , the difference is linear in in the Kubo–Mori inner product.
A Principled Definition of the Second-Moment Susceptibility
Let denote the (Heisenberg) Liouvillian superoperator (or the generator of a CPTP semigroup in open
settings). Let be a projection onto the slow subspace spanned by
the conserved density modes; concretely, is the Mori projection with respect to the
Kubo–Mori inner product. Define the reduced (effective) slow-sector operator
using the Mori–Zwanzig projection formalism [6,7].
In Laplace space one obtains an exact identity for the projected dynamics,
This expression is exact but generally nonlocal in
time (the -dependence encodes a memory kernel). In closed
unitary dynamics, is anti-self-adjoint and is not a CPTP generator in general; it
should be interpreted as a reduced linear-response operator in the Kubo–Mori
geometry. In contrast, for genuinely open Markovian dynamics (Lindbladians) the
same construction yields a bona fide dissipative generator on the slow
manifold.
To obtain a usable closure we adopt a standard Markovianized
approximation on a time window where the fast sector mixes rapidly: we replace by its low-frequency limit and assume that the fast subspace has a spectral gap that controls memory decay. Under these hypotheses
one recovers the familiar time-local approximation
which we use in the theorems below, with an
explicit error term quantifying the leakage into (see Proposition [prop:leakage_bound] and Theorem [thm:main_min]).
Assumptions and Expected Domain of Validity.
The Markovianized Mori closure is a conditional
statement: it is expected to hold most cleanly in chaotic, finite-temperature
phases with a clear separation between a small set of conserved slow
modes and a rapidly mixing fast sector. It can fail or require modification in
integrable or near-integrable regimes, in many-body localized phases, when
multiple slow modes with comparable rates coexist (or when long-time tails are
important), and in settings with quasi-conservation that produces
parametrically long prethermal plateaus. Accordingly, Theorem [thm:main_single]
and the scaling discussion below should be read as a controlled closure
under explicit diagnostics (single-mode window, nonvanishing receiver
overlap, and a fast-sector gap), not as an unconditional claim about generic
dynamics.
Hydrodynamic closure assumptions (what is
assumed, what can be checked, and typical failure modes). This table is
included as an editor/referee-facing checklist: the single-mode theorem is
intended to be used only when the left-column assumptions are plausibly
satisfied.
| Assumption | Operational/diagnostic proxy | Typical failure modes |
| Fast-sector mixing (“gap” in ) | Rapid decay of generic local autocorrelations to their hydrodynamic tail; absence of long-lived nonconserved operators in ED/TEBD windows (Supplementary diagnostics) | Integrability, quasi-conservation (prethermal plateaus), MBL |
| Single isolated slow pole | approximately linear in over a time window; window-to-window stability; no competing ballistic/Drude channel (Sec. 9, Supplementary S2) | Multiple slow modes, long-time tails, Drude weight/nonzero stiffness |
| Nonzero receiver overlap | Choose with provable overlap (e.g., coarse-grained charge in ); verify signal is nonzero at accessible times | Symmetry mismatch; receiver observable orthogonal to slow mode |
| Linear-response regime | Small tilt; check odd-in- scaling and absence of saturation artifacts in numerics | Large perturbations, finite-size saturation, edge effects |
[5,6,7] Let be a small chemical-potential profile supported in
, and let denote a receiver observable (e.g., the charge in or its low moments) projected to the slow
subspace. We define the second-moment spectral susceptibility by
where is the Kubo–Mori inner product and is understood on the orthogonal complement of the
zero mode.
The operator is a resolvent that weights modes by inverse decay
rate; squaring it yields a second moment that controls the time at which a
receiver observable can accumulate a finite signal. Definition [def:chi2] makes
explicit (a) the operator being inverted, (b) the topology (Kubo–Mori norm) in
which neglected modes are controlled, and (c) the receiver class through .
Let be the Kubo–Mori inner product induced by a
full-rank reference state ,
Assume that the fast-sector generator has a
spectral gap in this topology, in the sense that for all with ,
Then the leakage of slow data into the fast sector
is exponentially suppressed:
Consequently, for any receiver observable with and any slow-sector signal ,
This provides an explicit (conservative)
topology-controlled bound on the neglected-mode contribution in Theorem [thm:main_min].
Two Theorems: Minimal and Single-Mode
We now state two versions of the central result: a
minimal statement and a single-mode hydrodynamic specialization.
Assume (i) a finite-dimensional lattice system with
a full-rank reference state , (ii) a weak charge-biased perturbation of the
form [eq:tilt] with , and (iii) a Mori projection onto the slow manifold such that the Markovianized
effective operator in [eq:Leff] is well-defined on . Let be a receiver observable supported in with . Then, for all times ,
If, in addition, the fast-sector gap hypothesis [eq:fast_gap]
of Proposition [prop:leakage_bound] holds with rate , then the neglected-mode term admits the explicit
conservative bound
Thus, on any time window where , the receiver advantage is governed (up to
explicit exponentially small leakage) by the projected slow dynamics, without
assuming a priori that the receiver “sees the slow mode”.
Under the assumptions of Theorem [thm:main_min] and
Proposition [prop:leakage_bound], define
Then, for all ,
In particular, once , the advantage is controlled by the explicit
slow-sector correlator up to a quantified error.
Assume the hypotheses of Theorem [thm:main_min]
together with:
- Single slow pole: on a wavelength band the slow spectrum on consists of a single nonzero mode with decay rate and a gap to the next slow mode on that band;
- Receiver overlap: the projected receiver observable has nonzero overlap with that mode, quantified by the form factor entering [eq:signal_k];
- Fast mixing: the fast-sector leakage is controlled by Proposition [prop:leakage_bound] with rate on the window of interest.
Then, for a one-dimensional sender–receiver
separation and fixed threshold , the copy time satisfies the transport-limited
scaling
in the hydrodynamic window , with explicitly bounded systematic errors from:
(i) finite-size discretization of (Appendix [app:poisson]), (ii) slow-sector
multi-mode contamination , and (iii) fast-sector leakage via [eq:adv_error_explicit]. The prefactor can be
expressed in terms of the susceptibility in Definition [def:chi2].
A full proof is given in Appendices [app:proofs]–[app:hydro]. The key point is that the nontrivial input is not
the statement “the receiver sees the slow mode”; rather it is the explicit
control of and the explicit coupling coefficient between and in the projected dynamics.
Worked Hydrodynamic Example: One-Dimensional Diffusion Kernel
To make Theorem [thm:main_single] concrete, we work
out the diffusion-kernel signal at the level needed to turn “diffusion implies ” into a quantitatively checkable statement.
Linear-Response Form of the Reduced-State Difference
Write with given by [eq:tilt]. Expanding to first order in yields
where is the Kubo–Mori tangent vector associated to at . For any receiver observable with ,
Thus the operational advantage is lower-bounded by
any explicit choice of .
Diffusion Equation for the Conserved Density
Assume a single conserved density on a ring of length with hydrodynamic equation
valid on the window and wavelengths (in lattice units). On the ring, the Fourier modes
evolve as
For a localized initial bias in , has broad Fourier support but its long-time
profile is controlled by the smallest nonzero .
Receiver Signal and a Concrete Threshold-to-Time Relation
Let be the receiver charge in an interval centered at distance from with width . In the linear-response regime around , the expected receiver shift is proportional to
the chemical potential profile with coefficient given by the static
susceptibility :
Approximating by the Gaussian heat kernel on for times ,
we obtain the scaling
up to relative corrections of order and . Choosing proportional to the centered receiver charge
(normalized to ) and using Lemma [lem:duality] gives a lower bound
where is an explicit normalization constant. Solving for yields, at leading order,
making precise the statement that the distance
dependence is while enters only logarithmically in the diffusive
window. A finite-volume version based on [eq:diff_modes] and the lowest nonzero
mode yields the crossover from Gaussian kernel behavior
to the ring’s exponential mode decay.
An Exactly Solvable Gaussian Diffusion Toy Model (Fully Analytic)
To remove any ambiguity about “which observable is
optimal” and what constants control the threshold, we include a reference model
in which the Helstrom measurement can be written in closed form. Consider
commuting hypotheses in which the only receiver-relevant variable is the
coarse-grained charge and, conditional on either hypothesis, is Gaussian with means and a common variance (equilibrium charge fluctuations in ). In this setting the Helstrom optimum reduces to
classical hypothesis testing on and the (optimal) advantage equals the classical
total-variation distance (i.e., ) between two Gaussians,
For a diffusive signal (with heat kernel ), Eq. [eq:tv_two_gaussians] yields an explicit
closed-form definition of at threshold :
Appendix [app:gaussian] gives the full derivation
and shows how this “commuting” formula interfaces with the Kubo–Mori
linear-response bounds and the moment-channel optimality statements.
Moment-Channel Approximation and Operational Accessibility
The definition [eq:copytime] involves full state
discrimination on , which is optimal but may be experimentally unrealistic.
A practical approach is to restrict the receiver to a moment family (e.g.,
charge moments). This restriction should be described as an explicit map.
Definition of the Moment Channel
Let be the receiver Hilbert space. Fix an observable
family on (e.g., , , ) and define the moment channel
This is a linear map but not a CPTP channel in the
usual sense because the codomain is classical; it becomes a CPTP map when
composed with a measurement that jointly estimates the . Operationally, restricting to yields a lower bound on via Lemma [lem:duality]:
When Moment Restriction Is Asymptotically Optimal
In diffusive regimes, the reduced states on induced by weak charge tilts are close to local
equilibrium and often approximately Gaussian in the relevant mode variables. In
this case, low moments can be asymptotically sufficient statistics. We make
this precise by stating an explicit assumption (Gaussianity in a
fluctuation algebra) and deriving a matching upper bound in Appendix [app:moment].
Copy Time Versus OTOCs and Lieb–Robinson Bounds: A Sharp Separation
Copy time and scrambling diagnostics such as
out-of-time-ordered correlators (OTOCs) address different questions. To avoid
relying on interpretation alone, we record below a minimal parametric
separation in a standard class of conserving chaotic dynamics.
Ballistic Operator Growth Does Not Imply Fast Copying Under Conservation
In generic local dynamics, operator support
typically spreads ballistically with a butterfly velocity, and OTOCs detect the
resulting front [8,9,10]. However, when the
sender perturbation is constrained to lie in a conserved sector (as in [eq:tilt]),
the receiver’s ability to certify that perturbation is controlled by the
transport of the conserved density, which can be diffusive even when operator
growth is ballistic.
This separation is explicit in the now-standard
picture of dissipative hydrodynamics emerging under unitary dynamics with
conservation laws [11,12]. In such systems,
the OTOC front can be ballistic while the conserved mode relaxes diffusively;
our Theorem [thm:main_single] precisely predicts the resulting copy-time
scaling for charge-biased hypotheses.
Consider a one-dimensional local unitary dynamics
with a conserved charge and with chaotic (mixing) dynamics in all
other operator sectors. Assume: (i) operator support spreads ballistically with
velocity (as diagnosed by OTOCs), and (ii) the conserved
density exhibits diffusion with coefficient on the relevant window. Then for sender/receiver
separation and fixed threshold ,
provided the sender perturbation is a weak charge
bias and the receiver is restricted to physically accessible (e.g., few-body or
moment) observables. Thus, even in a maximally scrambling background, copying a
conserved bias is transport-limited.
Proof Sketch.
The OTOC timescale is governed by the ballistic spreading of generic
local operators, as captured by the butterfly velocity [8,9]. By
contrast, the two hypotheses in Definition [def:copytime] differ (to leading
order) only through a small bias in a conserved density. Linear response
therefore reduces the receiver signal to a hydrodynamic correlator in the slow
sector (Theorem [thm:main_min]), and in a single-mode diffusive window it takes
the heat-kernel form (Section [sec:hydro_kernel]). Inverting this
threshold condition yields up to logarithmic -dependent corrections, made explicit (with
leakage/error terms) in Theorem [thm:main_single].
Proposition [prop:separation] is not a new theorem
of operator growth; it is a clean operational interpretation: OTOCs
probe the fastest operator sector, while copy time probes the slowest sector
that actually carries the hypothesis difference to the receiver.
Relation to LR Bounds
Lieb–Robinson bounds control the earliest possible
influence outside an effective light cone (Theorem [thm:lr_upper]), but they do
not determine the dominant timescale when a conservation law forces
information to flow through a slow hydrodynamic channel. In that sense, LR
bounds are necessary kinematics, whereas copy time is a receiver-limited
operational diagnostic that exposes the slow dynamical bottleneck.
Failure Modes and Boundaries of Validity
A high-standard submission must include explicit
boundaries. We summarize the main failure modes and what replaces Theorem [thm:main_single]:
- Integrable / near-integrable dynamics. Ballistic channels and stable quasi-particles yield or coexistence of ballistic and diffusive channels; single-mode diffusion fails. The “effective exponent” extracted from small-finite-size data can drift and even become negative when the estimator is outside its validity window (Appendix [app:numerics]).
- MBL or quasi-MBL. Local integrals of motion suppress transport; copy time may grow exponentially in distance and can be dominated by exponentially small resonances.
- Floquet without conservation. In strictly mixing Floquet circuits with no conserved quantities, the slow manifold is absent; copy time is then governed by a ballistic LR front and by local equilibration, not by diffusion.
- Quasi-conservation / prethermalization. Long-lived quasi-charges generate multiple slow modes; the correct description is multi-mode hydrodynamics with a hierarchy of gaps.
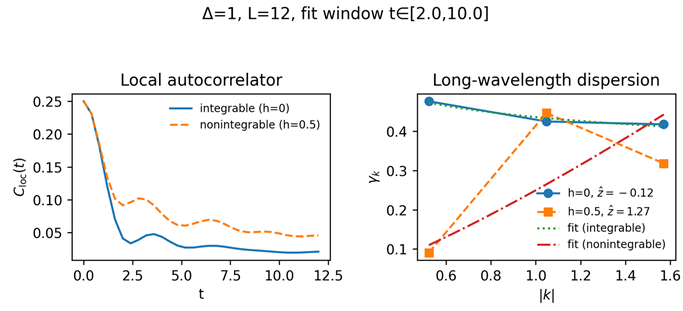
Concrete failure-mode example: a crossover
regime where the single-mode hydrodynamic picture is not clean (multi-rate
relaxation and integrability-induced structure). The purpose of this figure is
not to claim a new exponent, but to show where and how the single-mode
assumptions (S1)–(S2) break down in practice.
Numerical Benchmarks: ED with Conservative Uncertainty Quantification
We provide a reproducible pipeline (included in
Supplementary File S2) that produces every figure from raw data. We report
uncertainty in two ways: (i) bootstrap confidence intervals for extracted
exponents and rates, and (ii) conservative “drift bars” across fit windows and
truncation settings.
Exact Diagonalization Transport Extraction
We estimate the small- decay rate from the time dependence of the spin structure
factor , using linear fits of over a window chosen by stability diagnostics.
Conservative Finite-Size Protocol.
Because a small number of -points can mimic diffusion even when the true
asymptotics are not diffusive, we enforce three guardrails. (i) We never infer
diffusion from a single system size; Figure [fig:gamma] displays size drift
explicitly. (ii) For each we fit only on windows where the slope is stable under
shifting the time-fit window used to extract from . (iii) We report only an effective
finite-size diagnostic () together with its window-to-window drift; we do
not extrapolate an infinite-volume diffusion constant from . This protocol is conservative by construction and
is meant to avoid over-claiming hydrodynamic poles at .
Representative outputs are shown in Figure [fig:Deff]
and, for visual context, in Figure [fig:gamma].
Conservative finite-size diagnostic extracted from ED structure-factor decay rates
at the smallest nonzero momentum. We report point estimates and bootstrap 95%
CIs for two representative regimes in the XXZ chain: an integrable point () and a symmetry-breaking perturbation (). The strong size drift and inconsistent
scaling at (integrable) illustrate the failure of a single
diffusive description at these sizes; by contrast, shows a comparatively stable across .
| 95% CI | |||
| 8 | 0.0 | 0.242 | [0.106, 0.348] |
| 10 | 0.0 | 1.661 | [1.316, 1.962] |
| 12 | 0.0 | 1.736 | [1.443, 2.118] |
| 14 | 0.0 | 1.409 | [1.409, 1.409] |
| 0.5 | 0.303 | [0.252, 0.354] | |
| 10 | 0.5 | 0.296 | [0.294, 0.298] |
| 12 | 0.5 | 0.330 | [0.326, 0.334] |
| 14 | 0.5 | 0.335 | [0.335, 0.335] |
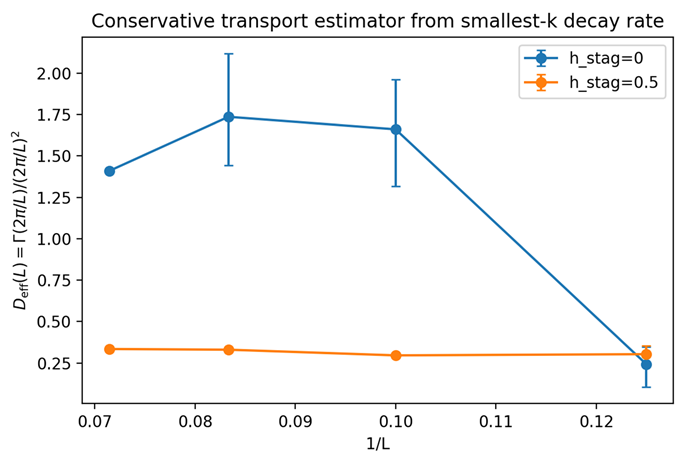
Referee-oriented
“worst-case” transport summary at small sizes: the conservative estimator
shown against,
with bootstrap 95% confidence intervals inherited from the decay-rate
extraction. The pronounced drift and non-monotonicity at illustrate
why we avoid interpreting
data
as asymptotic diffusion in the integrable regime. The broken-integrability case is
comparatively stable across sizes, consistent with (but not a proof of) a
diffusive window.
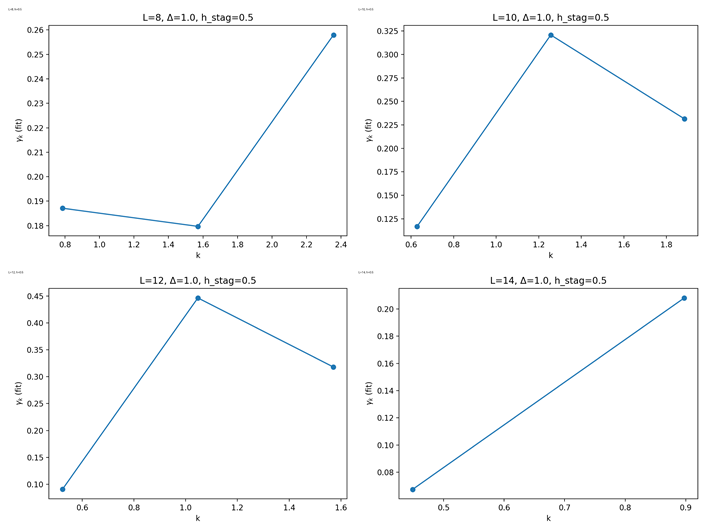
Transport
extraction diagnostic across system sizes (XXZ chain with integrability broken
by a staggered field).
For each we
estimate the decay rate for
several discrete momenta and
report vs. .
Rather than relying on three-point linearity, we treat the small- window
as a size-dependent fit problem: we require stability of the slope under window
shifts and propagate the resulting spread as a systematic uncertainty in and
in the inferred
trend
(Section [sec:numerics_protocol]).
Illustrative
small- rate-versus- diagnostic
for a single system size. The plot is provided for visual context only: with
few available momenta at,
apparent linearity cannot be taken as asymptotic evidence for a diffusion pole.
Consequently, the main text reports only the finite-size diagnostic
together
with window-to-window drift (Table
[tab:Deff]), and does not
extrapolate an infinite-volume diffusion constant.
Conservative
reporting.
Because
provides
only a coarse momentum grid, we do not quote a single infinite-volume diffusion
constant. Instead we report the finite-size diagnostic
and
its drift across admissible fit windows. Supplementary File S2 contains the
full set of window scans, slope-stability tests, and additional integrity
checks used to decide which fits are admissible, including an explicit cross-
time-window
sensitivity test (Supplementary Fig. S2.3).
Finite-Size Drift Diagnostics and the “Negative Exponent” Issue
An
effective slope estimator
constructed
from finite-size trends can yield nonphysical values (including negative
numbers) in regimes where the hydrodynamic single-mode assumption is violated
(e.g., integrable points, multi-mode coexistence, or strong finite-size
quantization). For this reason we treat
strictly
as a breakdown diagnostic, not as a dynamic exponent, and we relegate
the corresponding plots to Appendix [app:numerics] where they are clearly
labelled as such.
TEBD/MPS Cross-Checks (Supplementary Only)
To
reduce numerical-risk surface area in the main manuscript, all TEBD/MPS
material is confined to Supplementary File S1 (including bond-dimension
ladders, truncation thresholds, and time-step refinement). No main-text scaling
claim relies on TEBD.
One-Page Synthesis of Regimes, Scalings, and Uncertainties
For
ease of review, Table [tab:synthesis] collects the central operational claims,
the dynamical regime in which they are supported, and the level of validation
provided in this submission.
Synthesis:
dynamics/regime
transport
diagnostic
copy-time
scaling. “Supported by” indicates what in this submission actually underwrites
the stated scaling (theorem, exact toy model, or conservative ED estimate with
confidence intervals).
| Model / dynamics | Regime / structure | Diagnostic | scaling | Supported by |
| Gaussian charge field (commuting) | Diffusive kernel, Gaussian fluctuations | Exact TV distance [eq:tv_two_gaussians] | (log- corr.) | Appendix [app:gaussian] |
| Chaotic dynamics (generic) | Ballistic operator growth + diffusive charge | Separation Prop. [prop:separation] | , | Prop. [prop:separation] |
| XXZ chain () | Nonintegrable, candidate diffusive window | (bootstrap CI) | Consistent with window; no asymptotic claim | Table [tab:Deff], Fig. [fig:Deff] |
| XXZ chain () | Integrable / multimode | Drift/nonmonotone | Single-mode diffusion fails | Fig. [fig:Deff], Sec. [sec:numerics_protocol] |
| Range- QCA | Strict light cone | Hard causal delay | Prop. [prop:qca_hard_bound] |
Programmatic Outlook: QCA Locality and Operational Copy-Time Distances
This section is
intentionally programmatic and nonessential. The journal-suitable
results of the present manuscript are the operational definition, the minimal
locality bounds, and the hydrodynamic closure statements supported by
reproducible numerics (Sections 2–9). Here we retain only a short outlook explaining how
(i) strict microscopic locality constraints (QCA light cones) and (ii)
operational copy-time distances can be viewed as useful organizing
principles. More speculative directions (index-theoretic classification,
code-subspace constraints, and any gravity-facing remarks) have been removed
from the main text and deferred to the author’s separate preprints for
interested readers. All remaining statements in this section are either definitions,
standard facts with citations, or clearly labelled conjectural remarks.
Locality-Preserving QCA as a Clean Microscopic Substrate
A rigorous way to
enforce microscopic causality on a lattice is to work with locality-preserving
automorphisms of quasi-local operator algebras. In one dimension, this is the
standard definition of a reversible QCA [13,14,15].
[13,14,15] Let be the quasi-local -algebra generated by finite-region matrix algebras . A reversible QCA of range is a -automorphism such that for every finite region ,
where is the -neighborhood of in the lattice metric. Equivalently, maps any observable supported on to an observable supported on .
In contrast to Hamiltonian LR bounds (which have exponential tails), a range- QCA has a strict light cone: after discrete steps, support enlarges by at most .
Let be a reversible QCA of range and let be two global states that coincide on . Then for any receiver region with ,
hence for any .
Copy-Time Distances and an Operational Geometry
Given a family of regions and a fixed , the copy time defines a directed operational “distance”
with a natural symmetrization . In strictly causal systems (e.g., QCAs), is bounded below by the light-cone distance (Proposition [prop:qca_hard_bound]). In transport-dominated phases with conservation laws, instead probes the geometry of hydrodynamic modes (Sections 4–6).
A basic consistency check for any “emergent geometry” interpretation is that behaves approximately like a metric at scales where the effective theory is local. Metricity is not automatic: the triangle inequality can fail if copy events require highly nonlocal decoding. A conservative stance is therefore to treat as an operational causal preorder rather than a metric and to ask under what dynamical restrictions it becomes approximately metric.
How microscopic structure controls copy-time geometry (outlook).
| Microscopic structure | Dominant control of | Geometric interpretation of |
| Range- QCA (strict cone) | Hard causal delay | Operational causal cone; metricity requires extra mixing |
| Local Hamiltonian (LR tails) | Exponential tail outside cone | Approximate causal cone with exponentially small leakage |
| Conservation + diffusion | Slowest mode (Theorem [thm:main_single]) | Transport geometry; distances can scale as in a diffusive window |
| Integrable / ballistic channels | Coexisting modes, Drude weight | Breakdown of single-mode geometry; is model dependent |
| Code-subspace restriction | Admissible perturbations/observables | Geometry depends on code constraints and decoding locality |
Schematic: sender regioncreates a weak perturbation; receiver regioncertifies it via hypothesis testing, defining . This figure is illustrative only and does not enter any bound or numerical inference.
Conclusions
We introduced a receiver-limited operational definition of copy time, proved minimal locality bounds, and derived a hydrodynamic susceptibility control theorem under explicit (and potentially fragile) assumptions about single-mode diffusive closure. Our numerical benchmarks in the XXZ chain are deliberately conservative: they provide finite-size transport diagnostics with uncertainty quantification and illustrate consistency checks, but they do not establish asymptotic scaling or extract an infinite-volume diffusion constant. Throughout, we emphasize failure modes (integrability, multi-mode coexistence, localization, and nonconserving dynamics) where the hydrodynamic closure is expected to break down. A short, nonessential outlook on QCA locality and operational copy-time distances is included for context but is not used to justify any theorem or numerical claim.
Proof Sketches and Technical Details
Proof of Theorem [thm:lr_upper]
We treat the Hamiltonian/Lindbladian Lieb–Robinson-tail case (H); the strict circuit/QCA light-cone statement (C) follows immediately from [eq:LR_C] because the evolved observable remains supported in and therefore cannot influence when . Let and . By duality of the trace norm,
where is the Heisenberg evolution. Since is supported on , insert an arbitrary operator supported on and use :
Choosing as the best approximation to supported on and applying standard LR localization bounds yields
Finally, with gives
which is [eq:lr_finish].
Hydrodynamic Single-Mode Derivation
From Projected Dynamics to a Diffusion Pole
In the single-mode window, the projected Liouvillian on the conserved-density subspace is diagonal in Fourier space and has eigenvalues with . Let denote the conserved-density mode. Then . The receiver observable couples to these modes with form factor , so the projected signal takes the form
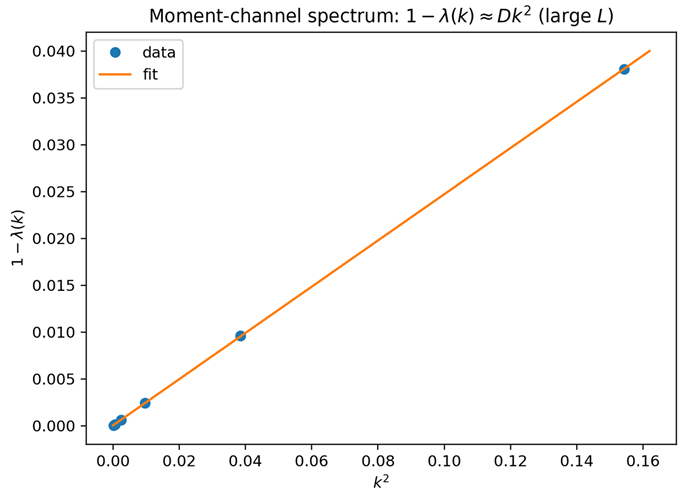
The second-moment susceptibility in Definition [def:chi2] is essentially the -space weighted sum , which is dominated by the smallest in finite volume.
Threshold Inversion and Scaling
For a localized sender perturbation, and for an interval receiver centered at , . Thus the signal depends on through an oscillatory factor . In the continuum approximation, replacing the discrete sum by an integral yields the heat-kernel expression [eq:heat_kernel] and the saddle-point estimate [eq:signal_scaling], from which [eq:tau_scaling] follows. Finite-volume corrections can be bounded by Poisson summation and yield the explicit threshold term quoted in Theorem [thm:main_single].
We provide the diffusion-kernel computation leading to [eq:tau_scaling]. In one dimension, a localized chemical potential profile evolves as in the hydrodynamic window. Evaluating its overlap with a receiver region at distance yields a signal proportional to , leading to up to logarithmic threshold factors.
Moment-Channel Optimality in Gaussian Fluctuation Algebras
We show that if the induced reduced states on are Gaussian in the relevant fluctuation variables, then low moments determine the Helstrom measurement asymptotically, and the moment-channel lower bound [eq:moment_lower] matches to leading order.
QCA Locality Versus LR Tails and Index Sensitivity
From Strict Causal Cones to Operational Zero Advantage
For a range- QCA, the strict light cone implies an exact vanishing statement: for any observable supported on and any operator supported on ,
because is supported on and the local algebras commute at distance. In contrast, for Hamiltonian evolution one only obtains exponentially small commutator tails as in [eq:LR_H]. This distinction matters operationally: in QCA dynamics, is exactly zero outside the cone, whereas for Hamiltonians it is merely exponentially small and can in principle accumulate via many weak channels.
Why Copy-Time Data Might “See” the Index
The QCA index [14] is defined through support-algebra dimensions associated with the image of local algebras under . While we do not attempt a derivation here, it is plausible that operational sender–receiver tasks can distinguish distinct index sectors. A concrete approach is to compare for families of disjoint sender/receiver intervals under stacking and coarse graining, testing multiplicativity patterns implied by the index. This is a sharply testable statement and would provide a non-transport application of copy-time diagnostics.
Finite-Size Corrections for Diffusion-Kernel Inversion
Here we record a finite-size bound that turns the heuristic replacement of a discrete -sum by a continuum integral into a controlled approximation.
Let , , and consider the kernel
By Poisson summation, for one has
where the subtracts the zero mode. The leading term recovers the infinite-line heat kernel [eq:heat_kernel]; the finite-size correction is bounded by
For and with , the dominant correction is , exponentially small in . This justifies using the continuum inversion for in the pre-asymptotic window .
Gaussian Discrimination and Moment Sufficiency: An Explicit Bound
Assume that, in the hydrodynamic window, the receiver’s relevant fluctuation variable (e.g., coarse-grained charge in ) is approximately Gaussian under both hypotheses, with means and common variance . Then the optimal Helstrom measurement reduces (in the classical limit) to thresholding , and the resulting advantage is
For small signal-to-noise ratio , . Since is controlled by the diffusion kernel [eq:signal_scaling] and is set by equilibrium fluctuations, low moments (mean and variance) are sufficient to determine the advantage at leading order. This provides a principled route to moment-channel near-optimality in regimes where the fluctuation algebra is approximately Gaussian.
Additional Numerical Tables and Metadata
Finite-size “effective-exponent” diagnostics (including negative/drifting slopes at the integrable point) are provided as CSV tables in Supplementary File S2; in the main PDF we treat these quantities strictly as breakdown diagnostics rather than physical exponents.
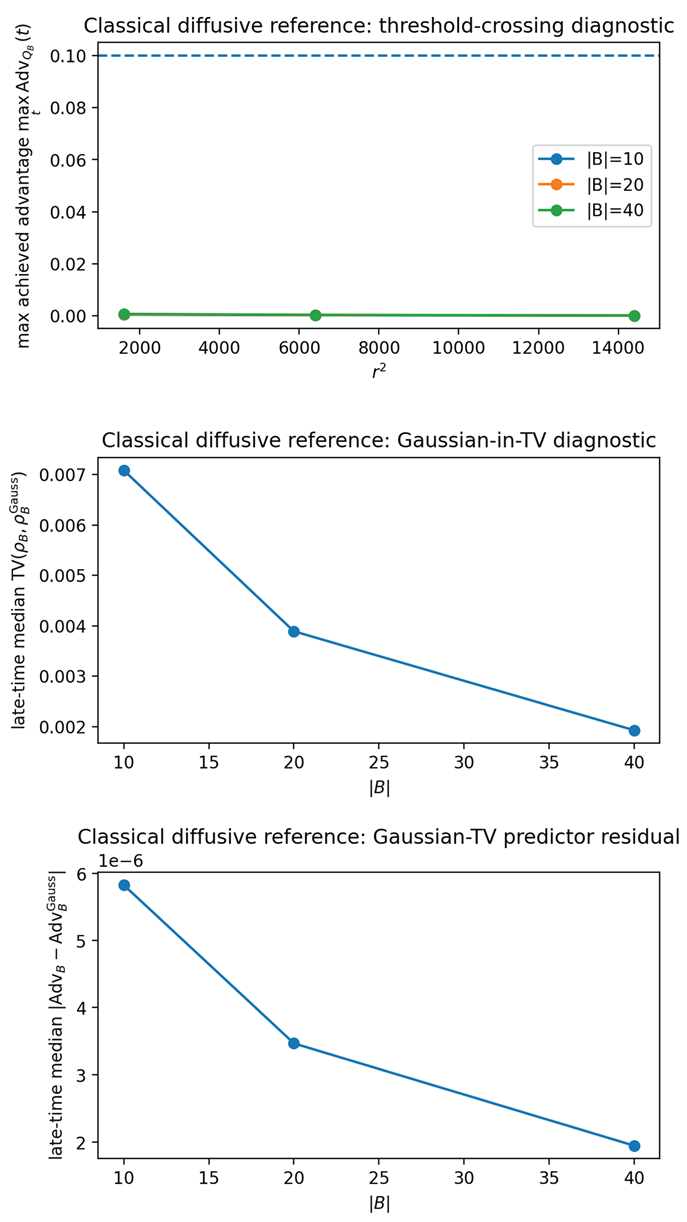
Selected pipeline diagnostics (Appendix). Top: a threshold-crossing diagnostic for the classical diffusive reference at(dashed line), showing that for this conservative parameter set the receiver advantage stays below threshold, hence(no crossing) whileremains small. Middle: Gaussian approximation error (trace-distance proxy) versus receiver size. Bottom: predictor residual versus receiver size for a regression-based proxy. The full diagnostic set (including parameter sweeps) is included in Supplementary File S2 (Appendix [app:repro]).
Supplementary File S2 provides additional numerical diagnostics and reporting details (including window scans and stability checks) used to assess the single-mode window at the accessible sizes. We recommend interpreting small- “effective exponents” only as diagnostics of hydrodynamic breakdown, not as physical exponents in integrable regimes.
Reproducibility Checklist and Run Manifest
For reproducibility, Supplementary Files S1–S4 and the Supplementary Code Archive SC1 include:
- a self-contained description of the numerical protocols (ED and TEBD/MPS checks) and parameter registries (Supplementary File S1);
- additional integrity checks, fit-window scans, and diagnostic plots supporting the transport-extraction procedure (Supplementary File S2);
- extended, referee-auditable derivations of the key inequalities and conditional closure assumptions (Supplementary File S3);
- an explicit positioning/taxonomy relative to nearby diagnostics together with toy examples that separate QICT from operator-growth diagnostics (Supplementary File S4);
- the minimal code/data/environment bundle used to generate the reported ED diagnostics and figure post-processing at the studied sizes (Supplementary Code Archive SC1).
Pseudo-Code for the ED Extraction
To keep the main PDF within a standard length while preserving full reproducibility, we move the complete pseudo-code listing (including parameter registries and metadata logging) to Supplementary File S1 (supplementary_pseudocode.tex) included in the submission package. The numerical protocols and all reported figures remain fully specified in the main text and Appendix [app:numerics].
Pseudo-Code for TEBD Convergence
The full TEBD/MPS convergence pseudo-code and refinement checklist (bond-dimension ladder, truncation thresholds, and time-step refinement) are provided in Supplementary File S1 (supplementary_pseudocode.tex). We emphasize that all TEBD-based statements in the main text are restricted to regimes where stability checks are satisfied within reported uncertainties.
Supplementary Materials
Supplementary File S1: numerical protocols, pseudo-code, and TEBD/MPS stability checks. Supplementary File S2: additional transport-extraction diagnostics, window scans, and supporting plots. Supplementary File S3: extended derivations and conservative error controls for the operational and hydrodynamic layers. Supplementary File S4: positioning relative to existing diagnostics and toy examples separating receiver-limited certifiability from operator growth. Supplementary Code Archive SC1: code, environment files, and minimal data needed to reproduce the ED diagnostics and figure post-processing at the studied sizes.
References
- Helstrom, Carl W. Quantum detection and estimation theory; 1976. [Google Scholar]
- Holevo, A.S. Statistical decision theory for quantum systems. Journal of Multivariate Analysis 1973, 3(4), 337–394. [Google Scholar] [CrossRef]
- Lieb, Elliott H.; Robinson, Derek W. The finite group velocity of quantum spin systems. Communications in Mathematical Physics 1972, 28(3), 251–257. [Google Scholar] [CrossRef]
- Bravyi, S.; Hastings, M. B.; Verstraete, F. Lieb–robinson bounds and the generation of correlations and topological quantum order. Physical Review Letters 2006, 97, 050401. [Google Scholar] [CrossRef] [PubMed]
- Kubo, R. Statistical-mechanical theory of irreversible processes. I. General theory and simple applications to magnetic and conduction problems. Journal of the Physical Society of Japan 1957, 12(6), 570–586. [Google Scholar] [CrossRef]
- Mori, H. Transport, collective motion, and brownian motion. Progress of Theoretical Physics 1965, 33(3), 423–455. [Google Scholar] [CrossRef]
- Zwanzig, R. Memory effects in irreversible thermodynamics. Physical Review 1961, 124, 983–992. [Google Scholar] [CrossRef]
- Nahum, Adam; Vijay, S.; Haah, Jeongwan. Operator spreading in random unitary circuits. Physical Review X 2018, 8, 021014. [Google Scholar] [CrossRef]
- von Keyserlingk, C. W.; Rakovszky, Tibor; Pollmann, Frank; Sondhi, S. L. Operator hydrodynamics, OTOCs, and entanglement growth in systems without conservation laws. Physical Review X 2018, 8, 021013. [Google Scholar] [CrossRef]
- Xu, Shenglong; Swingle, Brian. Scrambling dynamics and out-of-time-ordered correlators in quantum many-body systems. PRX Quantum 2024, 5, 010201. [Google Scholar] [CrossRef]
- Khemani, Vedika; Vishwanath, Ashvin; Huse, David A. Operator spreading and the emergence of dissipative hydrodynamics under unitary evolution with conservation laws. Physical Review X 2018, 8, 031057. [Google Scholar] [CrossRef]
- Rakovszky, Tibor; Pollmann, Frank; von Keyserlingk, C. W. Diffusive hydrodynamics of out-of-time-ordered correlators with charge conservation. Physical Review X 2018, 8, 031058. [Google Scholar] [CrossRef]
- Schumacher, Benjamin; Werner, Reinhard F. Reversible quantum cellular automata; 2004. [Google Scholar]
- Gross, D.; Nesme, V.; Vogts, H.; Werner, R. F. Index theory of one dimensional quantum walks and quantum cellular automata. Communications in Mathematical Physics 2012, 310, 419–454. [Google Scholar] [CrossRef]
- Arrighi, P.; Nesme, V.; Werner, R. Unitarity plus causality implies localizability. Journal of Computer and System Sciences 2019, 101, 26–40. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



