
Submitted:
29 December 2025
Posted:
30 December 2025
You are already at the latest version
Abstract
For many years, the hard coal mining industry has been searching for engineering solutions ensuring greater reliability of the machines operating in difficult underground conditions. The foregoing applies in particular to the scraper conveyors used in longwall systems, started up very frequently and exposed to variable dynamic loads, leading to accelerated wear of powertrain components. The authors of this study have developed a longwall scraper conveyor equipped with a torsionally flexible metal clutch of novel design. The article provides a description of a mathematical model of a conveyor featuring two centrally arranged chains along with a main (discharge) and auxiliary (return) drive, as well as results of the computer simulations performed for two variants of the drive system setup analysed: one with a typical flexible clutch and the other with the innovative torsionally flexible clutch. Analysis of these results has revealed that the solution proposed significantly reduces the amplitude of dynamic loads, which contributes to increased durability and reliability of conveyors under mining conditions.
Keywords:
1. Introduction
2. Materials and Methods
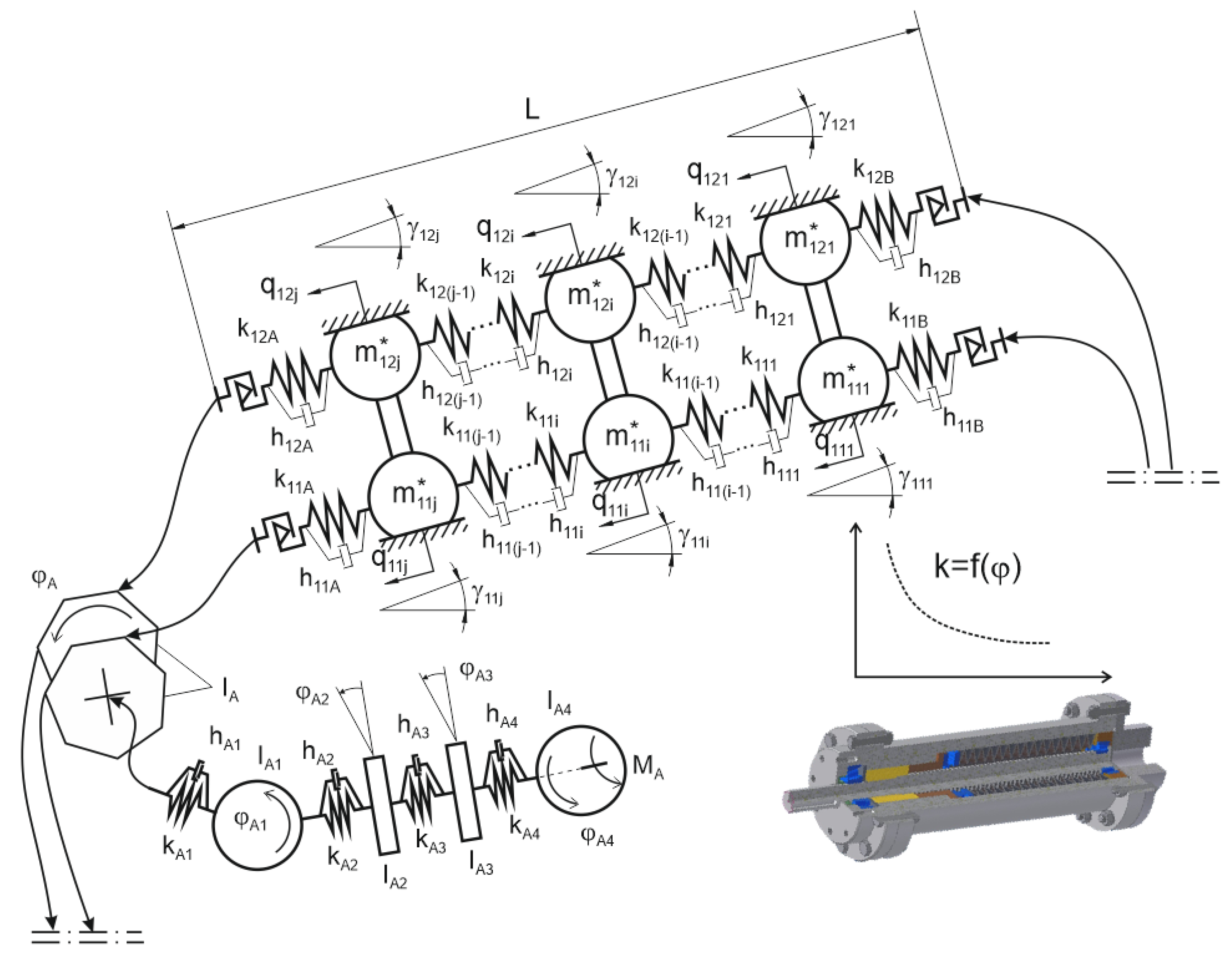
2.1. Assumptions for the Mathematical Model of the Scraper Conveyor
- −
- the upper branch chains were replaced with a finite number of concentrated masses connected by elastic massless bonds and contact elements; the mass of each section was concentrated in its centre, also taking scrapers and coal output into account,
- −
- the lower branch chains were replaced with a finite number of concentrated masses connected by elastic massless bonds and contact elements; the mass of each section was concentrated in its centre, also taking scrapers and pulverised fine coal into account,
- −
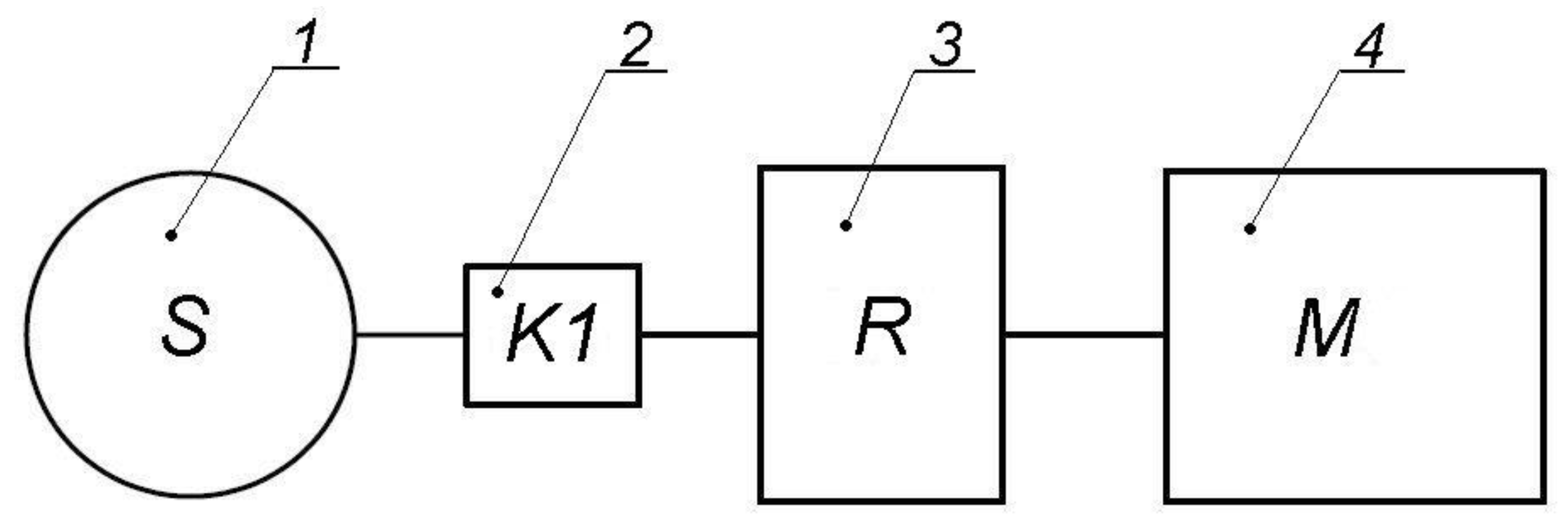
- the drive systems were replaced with rigid polygons, modelling the operation of chain wheels, linked with solids of revolution via viscoelastic bonds,
- −
-
the following moments of inertia were reduced for the polygons and solids of revolution:
- moment of inertia of the chain drum (IA, IB) and the gear transmission (IA1, IB1),
- moment of inertia of the output element of the torsionally flexible metal clutch seated on the high-speed transmission shaft (IA2, IB2),
- moment of inertia of the input element of the torsionally flexible metal clutch seated on the high-speed transmission shaft (IA3, IB3),
- moment of inertia of the drive motor rotor (IA4, IB4).
2.2. Dynamic Scraper Conveyor Model
- −
- the effect of the torsional stiffness of the torsionally flexible metal clutch on the dynamic loads in the conveyor,
- −
- the effect of the damping properties of the metal clutch on the behaviour of dynamic loads,
- −
- the effect of the conveyor parameters and external loads on the operational dynamics of clutches.
- −
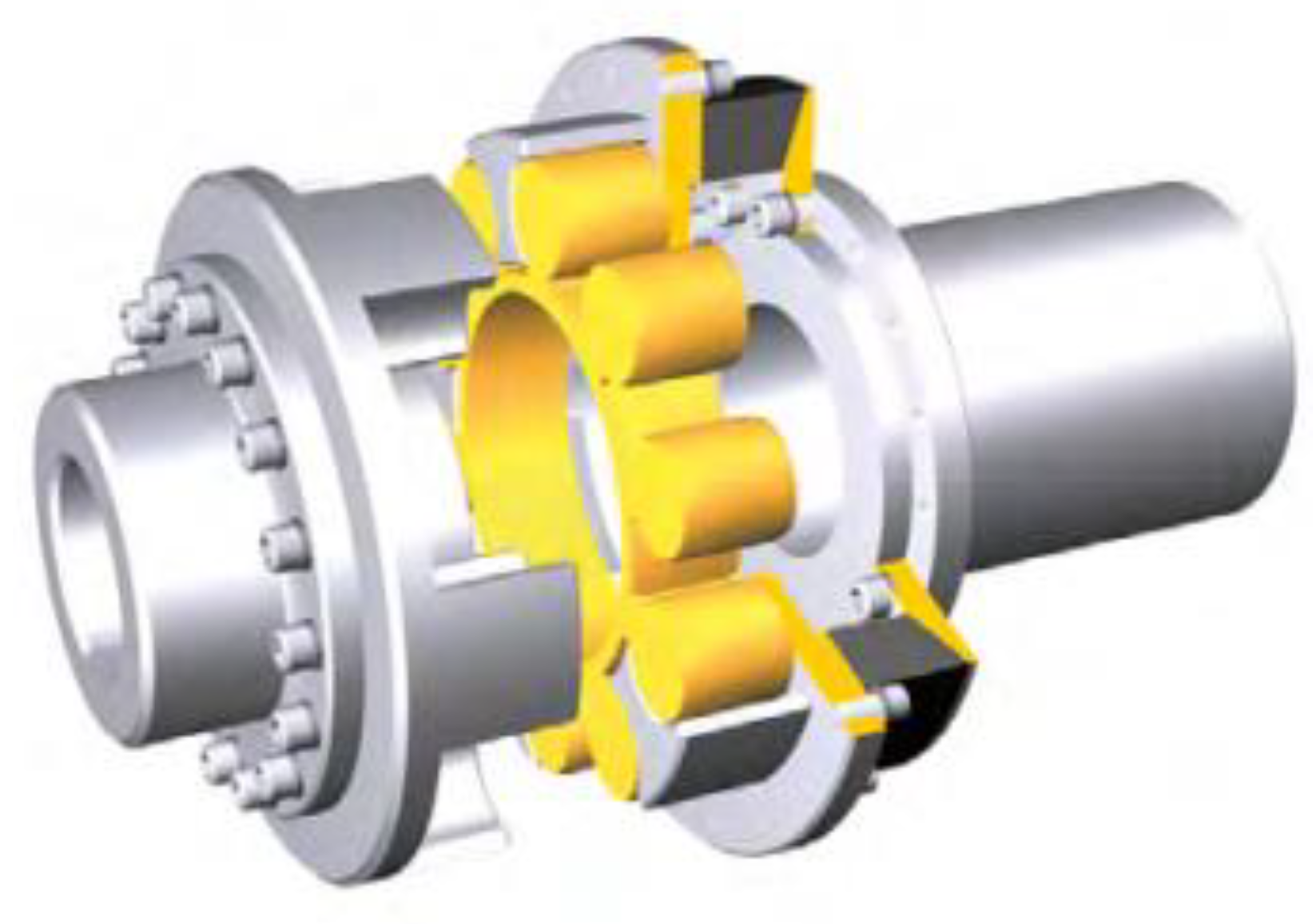
- flexible insert-type clutch (FC),
- −
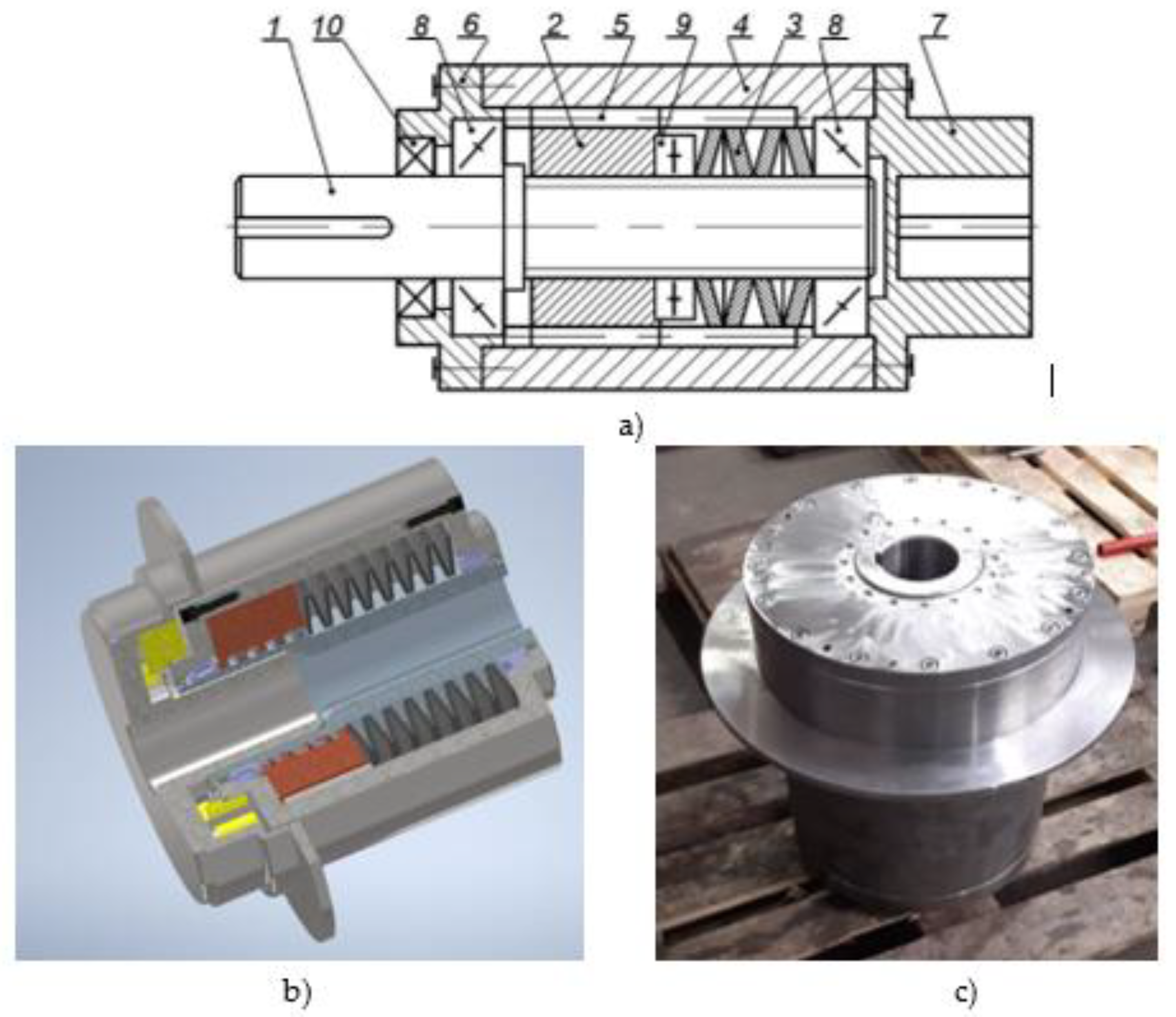
- torsionally flexible metal clutch (TFC).

| j | - | number of sections into which the upper and lower conveyor branches were divided in the physical modelling process, |
| κ | - | numerical chain designation; for a double-chain conveyor, this is either 1 or 2, |
| h | - | equivalent damping coefficients, |
| k | - | specific stiffness of elastic bonds, |
| q | - | translation coordinates, |
| ϕ | - | rotation coordinates, |
| R | - | radiuses of chain run-up onto the chain drum and radiuses of chain run-off from the drive drum, |
| H[] | - | Heaviside function, |
| S | - | static loads in the drive chain, |
| Z | - | coefficient determining the point of the drive chain breakage, |
| I | - | moments of inertia of the masses rotating in the drive systems, |
| M | - | driving torque of asynchronous motors in the main and auxiliary drive systems. |
2.3. Methodology for Dynamic Scraper Conveyor Simulation
2.4. Model Input Data
- −
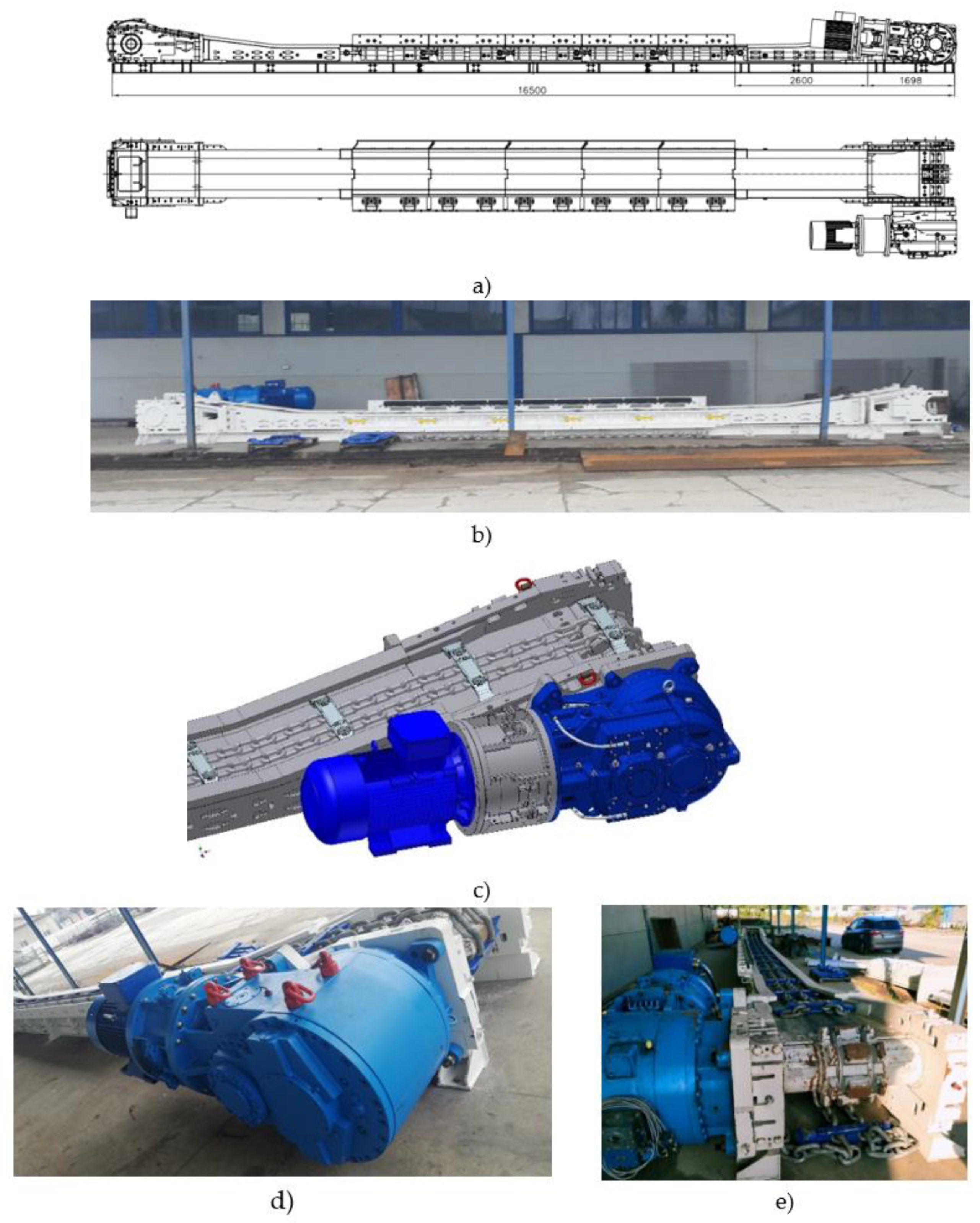
- conveyor length: 230 m,
- −
- drives: main and auxiliary, each with a 315 kW asynchronous motor,
- −
- evenly distributed coal output: 170 kg/m,
- −
- heading inclination: 0°, lower branch unloaded,
- −
- 34×126 link chain of constant stiffness along the entire outline,
- −
- identical mechanical characteristics of the motors,
- −
- simultaneous activation of motors in both drives,
- −
- no variation in the pitch of the scraper chain links,
- −
- values of torsional stiffness and damping of the drive system featuring the torsionally flexible metal clutch taken from previously defined ranges (see section 6.5).
- −
- flexible insert-type clutch, used in the main and auxiliary drives,
- −
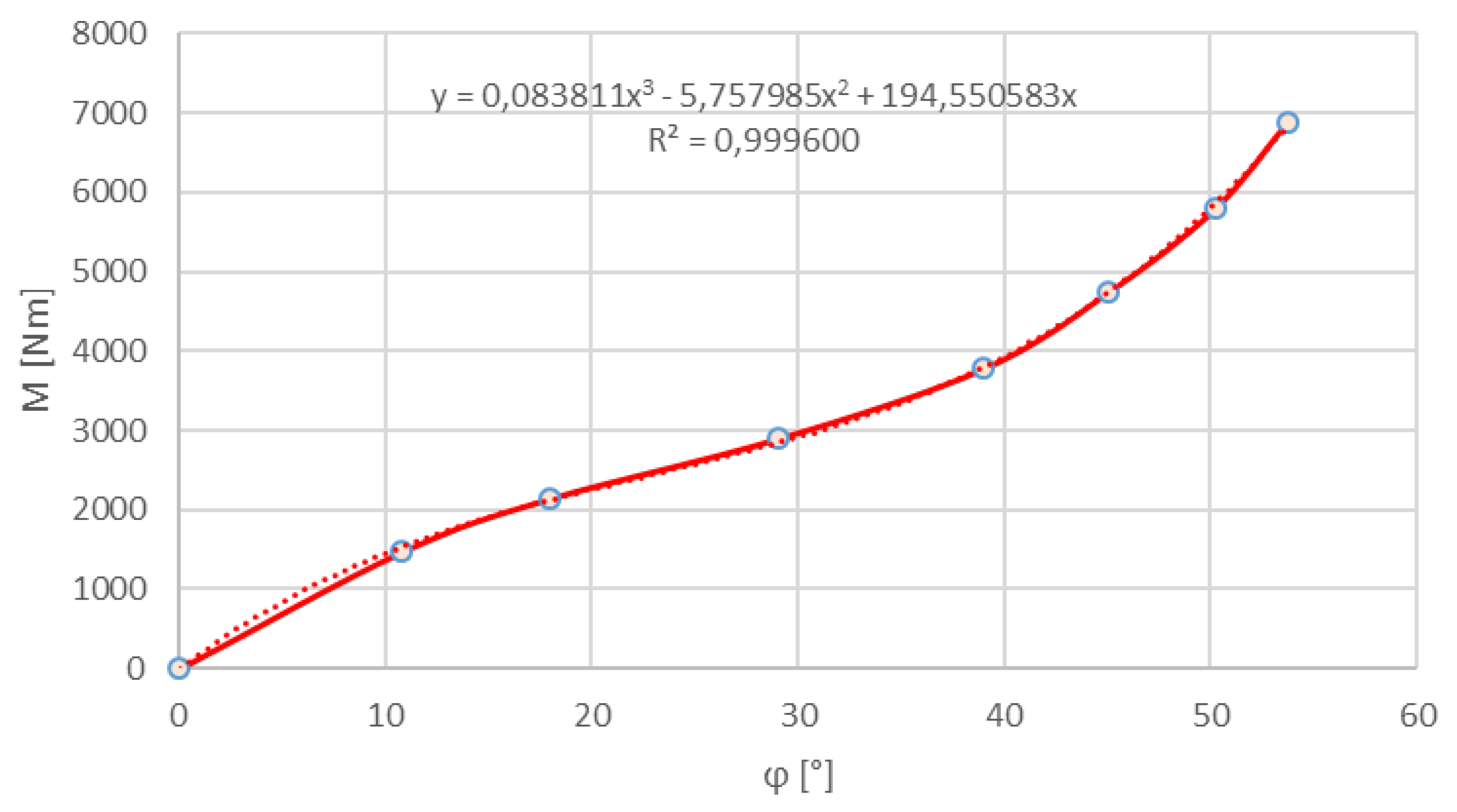
- torsionally flexible metal clutch, introduced into the model by way of the characteristics obtained in the experimental studies (Figure 6).
3. Results and Discussion
- −
- −
- −
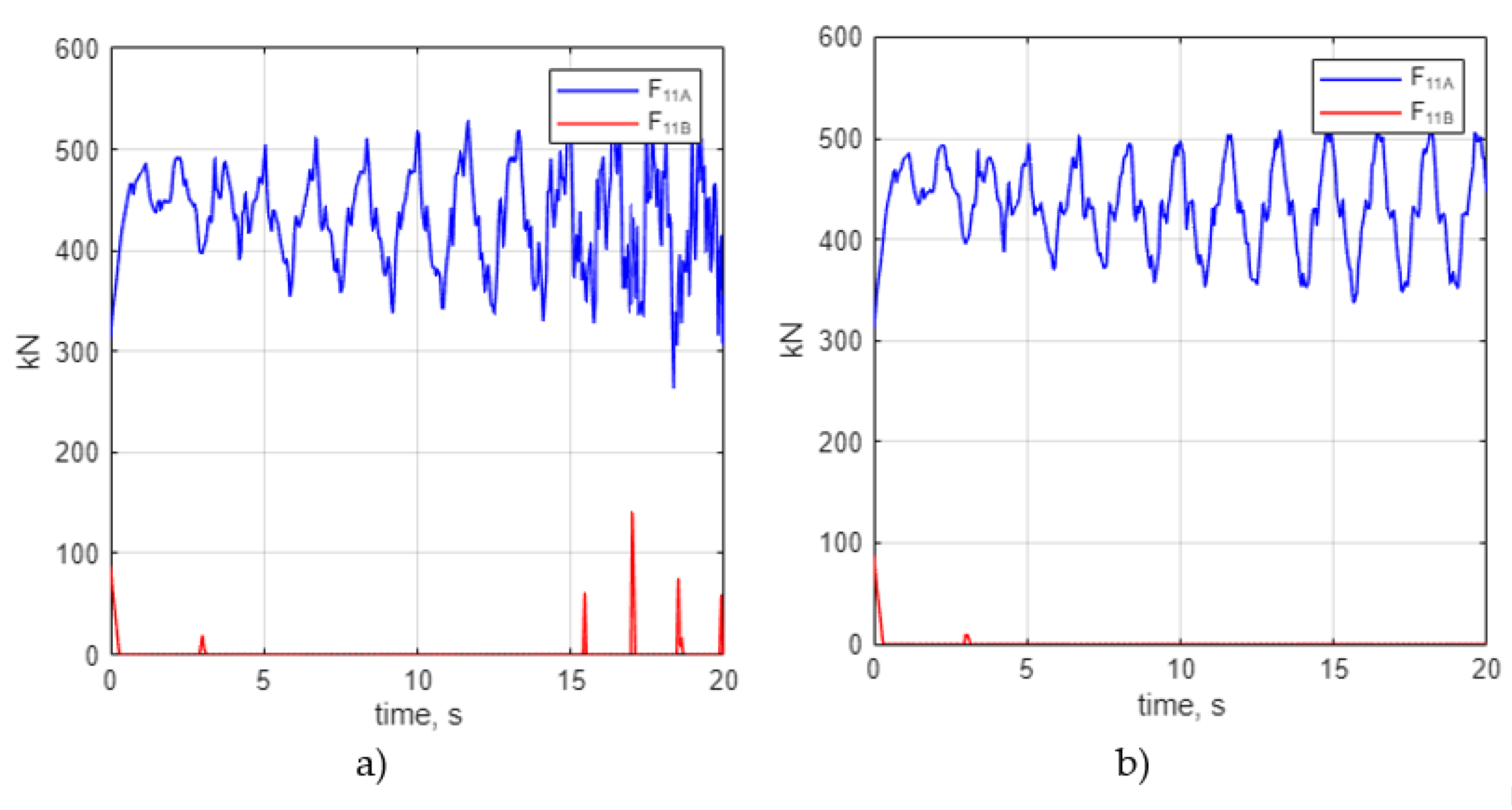
- maximum value of the dynamic load in the chain at the point where it runs up onto the chain drum in the main drive (F11A,max) and the amplitude of this load (AF11A) (Figure 9 – blue).
- −
- reducing the irregularity in the angular velocity of the drums,
- −
- limiting the chain slackening phenomenon,
- −
- strongly damping torsional vibrations,
- −
- reducing peak as well as amplitude loads in both the clutches and the chain.
5. Conclusions
- The conveyor dynamics on start-up are significantly conditioned by the torsional flexibility of the clutch.
- The application of a metal clutch characterised by increased flexibility has effectively eliminated the phenomenon of chain slackening.
- Offering higher torsional flexibility, the clutch ensures adequate damping of torsional vibrations.
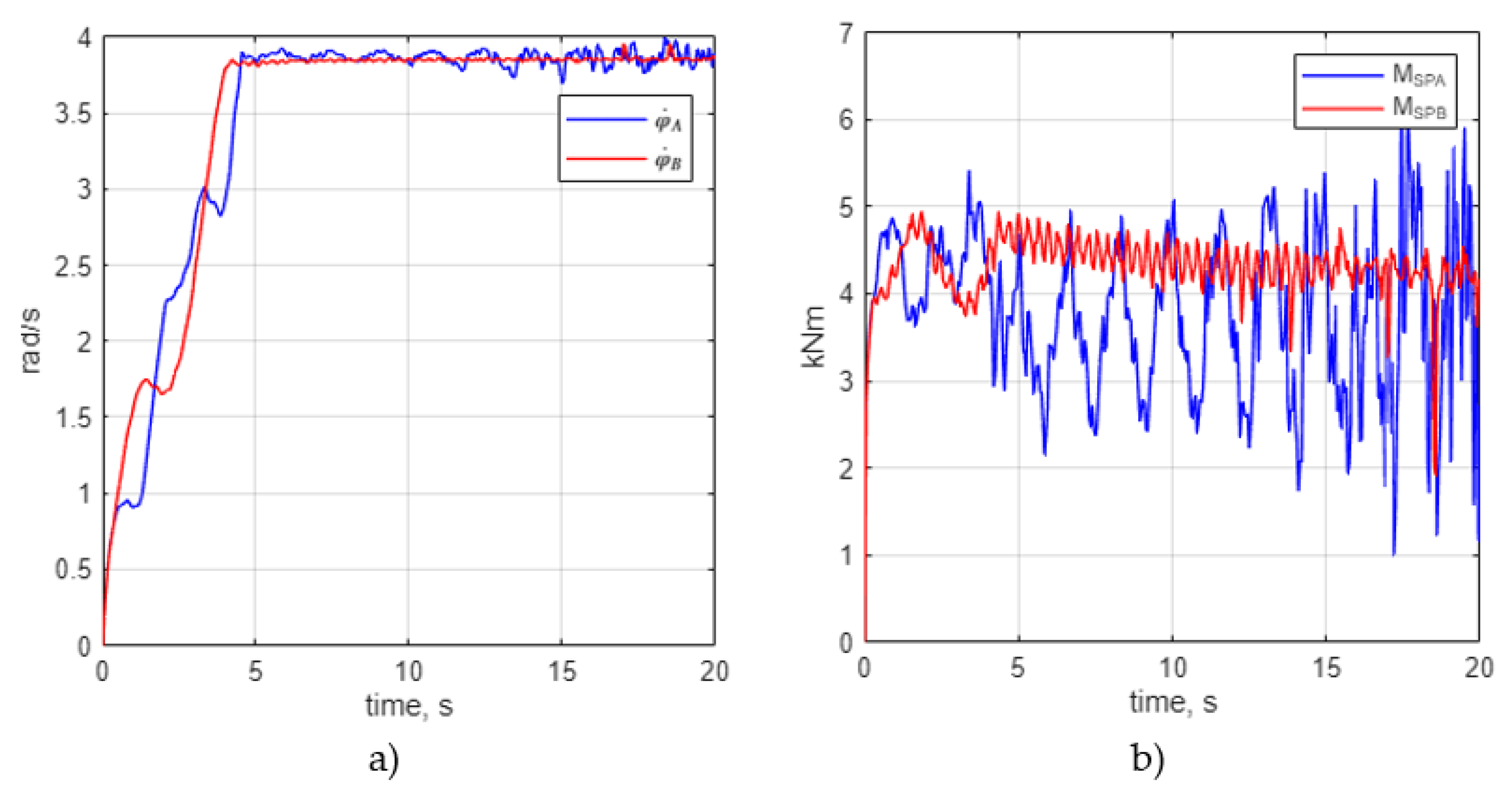
- In setup no. 1 (typical mining clutch), evident irregularities were observed in terms of the angular velocity and chain slackening in the auxiliary drive area.
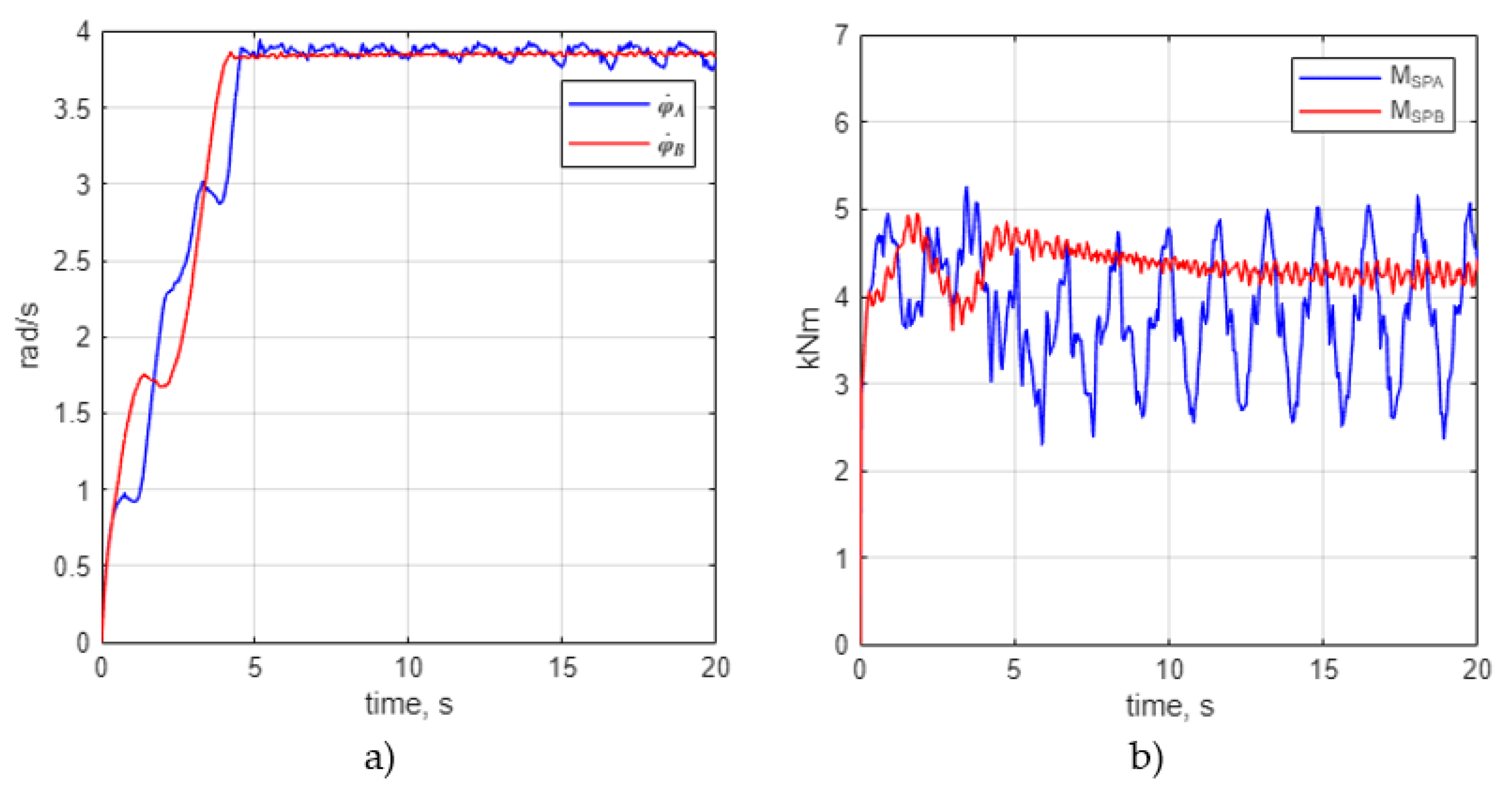
- In setup no. 2 (highly flexible clutch), no force behaviour typical of periodic chain slackening was observed in the section where the chain runs off the drum.
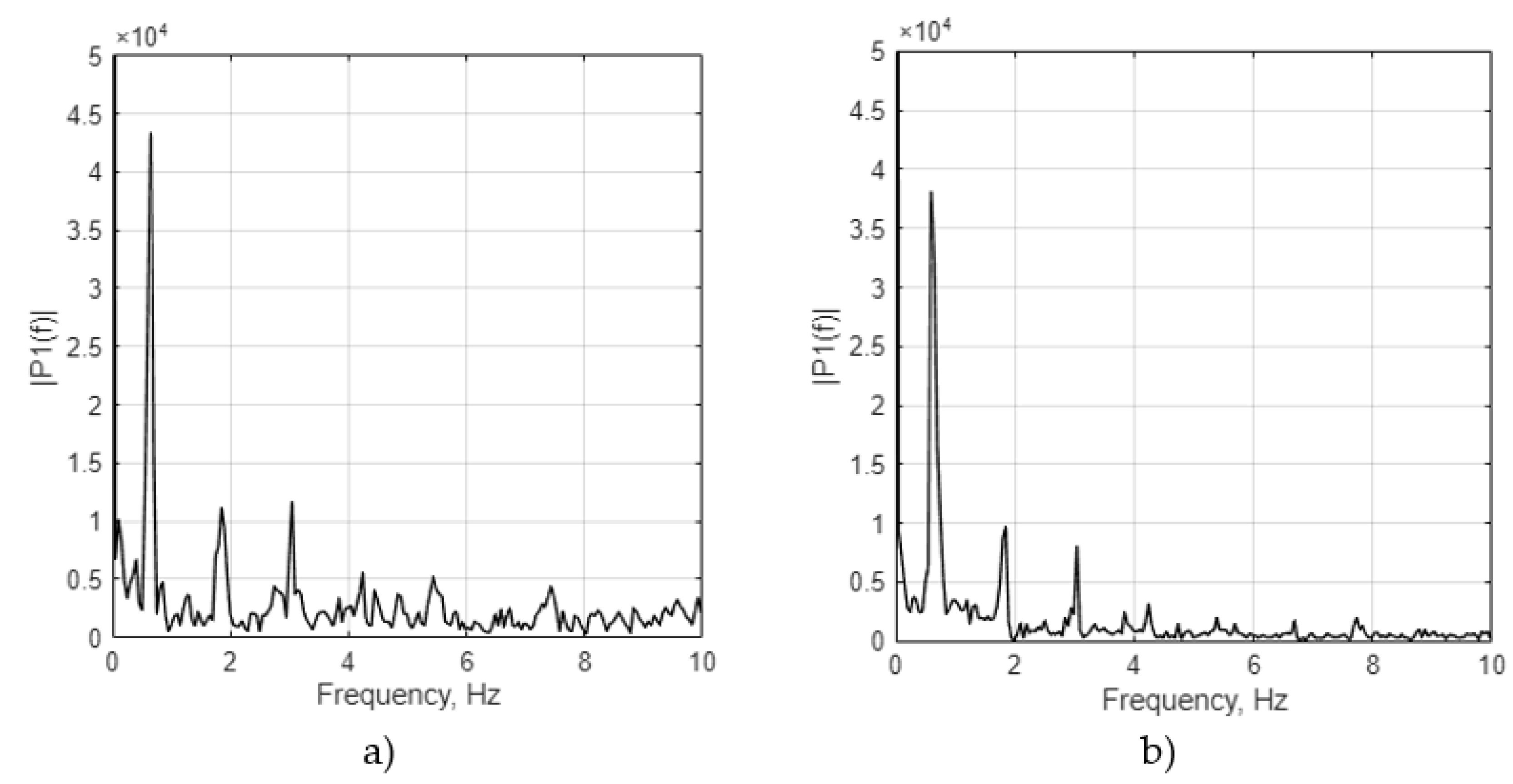
- Spectral analysis has revealed reduced amplitudes of the three dominant frequency components and a decrease in the intensity of high-frequency disturbances.
- The application of the flexible metal clutch has effectively decreased the amplitude of the maximum load torque of the clutch operating in the auxiliary drive (AMSPB) – by as much as 85.6%, as well as in the main drive (AMSPA) – by 49.8%, while the maximum load torque of the main drive (MSPA,max) was reduced by 21.5%, and that of the auxiliary drive (MSPB,max) – by 6.3%.
- The amplitude of the dynamic loading force affecting the conveyor chain at the point where it runs up onto the chain drum (AF11A) was reduced by 41.3%, while the maximum force acting in the main drive (F11A,max) dropped by 8.5%.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, Y.; Chen, Q.; Dai, B.; Wang, D. Guidance and review: Advancing mining technology for enhanced production and supply of strategic minerals in China. Green and Smart Mining Engineering 2024, 1, 2–11. [Google Scholar] [CrossRef]
- Doyle, K.; Moore, K.; Foster, P. Criteria-driven socio-environmental maturity modelling for mining: Driving positive sustainability attitudes and perceptions at diverse operational scales. Resources Policy 2025, 105, 105606. [Google Scholar] [CrossRef]
- Onifade, M.; Zvarivadza, T.; Adebisi, J.A.; Said, K.O.; Dayo-Olupona, O.; Lawal, A.I.; Khandelwal, M. Advancing toward sustainability: The emergence of green mining technologies and practices. Green and Smart Mining Engineering 2024, 1, 157–174. [Google Scholar] [CrossRef]
- Brodny, J.; Alszer, S.; Krystek, J.; Tutak, M. Availability analysis of selected mining machinery. Arch. Control Sci. 2017, 27. [Google Scholar] [CrossRef]
- Stecuła, K.; Brodny, J. Meaning of Knowledge to the Increased Effectiveness of the Use of Mining Machines. In Zeszyty Naukowe; Organizacja i Zarządzanie/Politechnika Śląska; Politechnika Śląska: Gliwice, Poland, 2017. [Google Scholar]
- Xia, R.; Li, B.; Wang, X.; Yang, Z.; Liu, L. Screening the main factors affecting the wear of the scraper conveyor chute using the Plackett–Burman method. Mathematical Problems in Engineering 2019, 2019, 1–11. [Google Scholar] [CrossRef]
- Li, S.; Zhu, Z.C.; Lu, H.; Shen, G. A system reliability-based design optimization for the scraper chain of scraper conveyors with dependent failure modes. Eksploatacja i Niezawodność 2019, 21, 392–402. [Google Scholar]
- Tylczak, J.H. Abrasive wear. In ASM Handbook—Friction, Lubrication, and Wear Technology; ASM International, 1992; pp. 184–190. [Google Scholar]
- Hawk, J.A.; Wilson, R.D. Tribology of Earthmoving, Mining, and Minerals Processing. In Modern Tribology Handbook; CRC Press LLC, 2001. [Google Scholar]
- Wieczorek, A.N.; Konieczny, Ł.; Wojnar, G.; Wyroba, R.; Filipowicz, K.; Kuczaj, M. Reduction of dynamic loads in the drive system of mining scraper conveyors through the use of an innovative highly flexible metal coupling. Eksploatacja i Niezawodnosc – Maintenance and Reliability 2024, 26(2), Art. 181171. [Google Scholar] [CrossRef]
- Głodniok, M. Problemy eksploatacji przenośników ścianowych w warunkach zintensyfikowanej produkcji węgla. Przegląd Górniczy 2014, 70, 34–39. [Google Scholar]
- Wang, H.; Li, Z. Safety management of coal mining process. In IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2020; Volume 598. [Google Scholar]
- Angeles, E.; Kumral, M. Optimal inspection and preventive maintenance scheduling of mining equipment. Journal of Failure Analysis and Prevention 2020, 20, 1408–1416. [Google Scholar] [CrossRef]
- Antoniak, J. Tendencje rozwojowe w budowie napędów przenośników zgrzebłowych o dużej wydajności transportowej; Politechnika Śląska, Instytut Mechanizacji Górnictwa: Gliwice, Poland, 1998. [Google Scholar]
- Suchoń, J. Górnicze przenośniki zgrzebłowe. Budowa i zastosowanie; Instytut Techniki Górniczej KOMAG: Gliwice, Poland, 2012. [Google Scholar]
- Suchoń, J. Górnicze przenośniki zgrzebłowe. Teoria, badania i eksploatacja; Instytut Techniki Górniczej KOMAG: Gliwice, Poland, 2012. [Google Scholar]
- Wieczorek, A.N. Designing machinery and equipment in accordance with the principle of sustainable development. Manag. Syst. Prod. Eng. 2015, 1, 28–34. [Google Scholar]
- Sikora, M.; Dąbek, D.; Szota, P. Analiza dynamiki układów napędowych przenośników zgrzebłowych. Mechanizacja i Automatyzacja Górnictwa 2020, 583, 12–18. [Google Scholar]
- Gramblička, S.; Kohár, R.; Stopka, M. Dynamic analysis of mechanical conveyor drive system. Procedia Eng. 2017, 192, 259–264. [Google Scholar] [CrossRef]
- Wieczorek, A.N.; Konieczny, Ł.; Burdzik, R.; Wojnar, G.; Filipowicz, K.; Kuczaj, M. A complex vibration analysis of a drive system equipped with an innovative prototype of a flexible torsion clutch as an element of pre-implementation testing. Sensors 2022, 22(6), 2183. [Google Scholar] [CrossRef] [PubMed]
- Wojnar, G.; Burdzik, R.; Wieczorek, A.N.; Konieczny, Ł. Multidimensional data interpretation of vibration signals registered in different locations for system condition monitoring of a three-stage gear transmission operating under difficult conditions. Sensors 2021, 21(23), 7808. [Google Scholar] [CrossRef]
- Oberg, E.; Jones, F.D.; Horton, H.L. Machinery’s Handbook; Industrial Press: New York, USA, 2016. [Google Scholar]
- Mark’s Standard Handbook for Mechanical Engineers; Baumeister, T., Avallone, E.A., Baumeister, L.S., Eds.; McGraw-Hill: New York, USA, 1996. [Google Scholar]
- Niemann, G.; Winter, H. Maschinenelemente, Band 1–3; Springer-Verlag: Berlin/Heidelberg, Germany, 2003. [Google Scholar]
- Roloff, H.; Matek, W. Maschinenelemente; Springer-Vieweg: Wiesbaden, Germany, 2015. [Google Scholar]
- Żmuda-Trzebiatowski, K. Podatne elementy mechaniczne w systemach napędowych; Wydawnictwo Politechniki Gdańskiej: Gdańsk, Poland, 2006. [Google Scholar]
- Franz, W. Getriebetechnik und Antriebstechnik; Vogel Fachbuch: Würzburg, Germany, 2009. [Google Scholar]
- Allen, D. Couplings and Joints: Design, Selection and Application; Marcel Dekker: New York, USA, 1999. [Google Scholar]
- Żółtowski, J. Podstawy Konstrukcji Maszyn: Połączenia, Łożyskowanie, Sprzęgła; Oficyna Wydawnicza Politechniki Warszawskiej: Warszawa, Poland, 2008. [Google Scholar]
- Skoć, A.; Spałek, J.; Markusik, S. Podstawy Konstrukcji Maszyn, Tom 2; Wydawnictwa Naukowo-Techniczne: Warszawa, Poland, 2000. [Google Scholar]
- Markusik, S. Sprzęgła mechaniczne; WNT: Warszawa, Poland, 1979. [Google Scholar]
- Markusik, S. Wysokopodatne sprzęgła do napędów dużej mocy w napędach przenośnikowych. II Sympozjum – Eksploatacja napędów górniczych, 1995; KOMEL: Katowice, Poland. [Google Scholar]
- Kuczaj, M.; Wieczorek, A.N.; Konieczny, Ł.; Burdzik, R.; Wojnar, G.; Filipowicz, K.; Głuszek, G. Research on vibroactivity of toothed gears with highly flexible metal clutch under variable load conditions. Sensors 2022, 23, 287. [Google Scholar] [CrossRef]
- Li, T.; Huang, Z.; Chen, Z.; Wang, J.; Wang, C. Study on the torsional stiffness and vibration response law of laminated coupling considering the effect of excess. Mechanical Systems and Signal Processing 2025, 222, 111739. [Google Scholar] [CrossRef]
- Filipowicz, K. Doświadczalna i teoretyczna identyfikacja cech dynamicznych nowej konstrukcji sprzęgła podatnego w zastosowaniu do układu napędowego maszyn górniczych; Wydawnictwo Politechniki Śląskiej: Gliwice, Poland, 2009. [Google Scholar]
- Filipowicz, K. Determining of the static characteristics of a torsionally flexible metal coupling. Acta Montan. Slovaca 2007, 12, 304–308. [Google Scholar]
- Wieczorek, A.N. Własności eksploatacyjne metalowych sprzęgieł podatnych do korytarzowych przenośników zgrzebłowych. 25. Międzynarodowa Konferencja Naukowo-Techniczna KOMTECH: Górnictwo w dobie zielonej transformacji, 2024. [Google Scholar]
- Kotwica, K.; Kulinowski, P.; Stopka, G.; Kasza, P.; Zarzycki, J. Report on the Performance of a Research Service including Testing the Properties of a Prototype Scraper Conveyor with a Built-in Metal Flexible Clutch and an Insert Clutch; AGH University of Science and Technology: Cracow, Poland, 2021. [Google Scholar]
- Mężyk, A. Analiza kształtowania cech dynamicznych napędów elektromechanicznych; Wydawnictwo Politechniki Śląskiej: Gliwice, Poland, 2002. [Google Scholar]
- Mielniczuk, L.; Rosikowski, J.; Antoniak, J.; Lutyński, A. Development and investigations of technology involved in highly productive longwall faces at the Piast Coal Mine with regard to CST intelligent drive system. International Kolloquium High-Performance Longwall Operations, 2000; RWTH Aachen; pp. 547–559. [Google Scholar]
- Sydenham, P.H.; Thorn, R. Handbook of Measuring System Design; John Wiley & Sons Ltd.: New York, USA, 2005. [Google Scholar]
- Banerjee, S. Dynamics for Engineers; John Wiley & Sons Ltd.: Chichester, UK, 2005. [Google Scholar]
- Dresig, H.; Holzweißig, F. Maschinendynamik; Springer-Verlag: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- He, H.; Zhao, S.F.; Guo, W.; Wang, Y.; Xing, Z.X.; Wang, P.F. Multi-fault recognition of gear based on wavelet image fusion and deep neural network. AIP Adv. 2021, 11, 125025. [Google Scholar] [CrossRef]
- Swider, J.; Herbuś, K.; Szewerda, K. Dynamic analysis of scraper conveyor operation with external loads. MATEC Web Conf. 2017, 94, 01009. [Google Scholar] [CrossRef]
- Wang, Z.S.; Li, B.; Liang, C.; Wang, X.W.; Li, J.H. Response analysis of a scraper conveyor under chain faults based on MBD-DEM-FEM. J. Mech. Eng. 2021, 67, 501–515. [Google Scholar] [CrossRef]
- Zhang, Q.; Zhang, R.X.; Tian, Y. Scraper conveyor structure improvement and performance comparative analysis. Strength Mater. 2020, 52, 683–690. [Google Scholar] [CrossRef]
- Yuan, P.F.; He, B.Y.; Zhang, L.H. Planar dynamic modelling of round link chain drives considering the irregular polygonal action and guide rail. Proc. Inst. Mech. Eng. Part K-J. Multi-Body Dyn. 2021, 235, 338–352. [Google Scholar] [CrossRef]
- Shprekher, D.M.; Babokin, G.I.; Kolesnikov, E.B.; Ovsyannikov, D.S. Research of load unbalance of a two-motor variable frequency drive for scraper conveyor. Izvestiya Vysshikh Uchebnykh Zavedenii Elektromekhanika 2021, 64, 37–45. [Google Scholar]
- Shprekher, D.M.; Babokin, G.I.; Zelenkov, A.V.; Ovsyannikov, D.S. Universal computer model for studying the dynamics of a two-motor scraper conveyor. Izvestiya Vysshikh Uchebnykh Zavedenii Elektromekhanika 2021, 64, 56–64. [Google Scholar]
- Zhang, X.; Li, W.; Zhu, Z.C.; Jiang, F. Fault detection for scraper chain using an observer-based tension distribution estimation algorithm. Curr. Sci. 2020, 118, 1792–1802. [Google Scholar] [CrossRef]
- Jiang, S.B.; Lv, R.B.; Wan, L.R.; Mao, Q.H.; Zeng, Q.L.; Gao, K.D.; Yang, Y. Dynamic characteristics of the chain drive system of scraper conveyor based on the speed difference. IEEE Access 2020, 8, 168650–168658. [Google Scholar] [CrossRef]
- Jiang, S.B.; Ren, W.J.; Mao, Q.H.; Zeng, Q.L.; Yu, P.F.; Gao, K.D.; Wang, L. Dynamic analysis of the scraper conveyor under abnormal operating conditions based on the vibration and speed characteristics. Shock Vib. 2021, 8887744. [Google Scholar] [CrossRef]
- Jiang, S.B.; Huang, S.; Mao, Q.H.; Zeng, Q.L.; Gao, K.D.; Lv, J.W. Dynamic properties of chain drive in a scraper conveyor under various working conditions. Machines 2022, 10, 579. [Google Scholar] [CrossRef]
- Li, X.; Xu, Y.; Liu, J.; Liu, J.; Pan, G.; Shi, Z. A dynamic model for a shell-propulsion shaft system considering the shell and shaft flexibilities. Mechanical Systems and Signal Processing 2025, 224, 111928. [Google Scholar] [CrossRef]
- Ren, W.J.; Wang, L.; Mao, Q.H.; Jiang, S.B.; Huang, S. Coupling properties of chain drive system under various and eccentric loads. Int. J. Simul. Model. 2020, 19, 643–654. [Google Scholar] [CrossRef]
- Jiang, S.B.; Huang, S.; Zeng, Q.L.; Wang, C.L.; Gao, K.D.; Zhang, Y.Q. Dynamic properties of chain drive system considering multiple impact factors. Int. J. Simul. Model. 2022, 21, 284–295. [Google Scholar] [CrossRef]
- Dai, K.; Zhu, Z.; Shen, G.; Li, X.; Tang, Y.; Wang, W. Modeling and adaptive tension control of chain transmission system with variable stiffness and random load. IEEE Trans. Ind. Electron. 2021, 69, 8335–8345. [Google Scholar] [CrossRef]
- Yuan, P.F.; He, B.Y.; Zhang, L.H. Planar dynamic modelling of round link chain drives considering the irregular polygonal action and guide rail. Proc. Inst. Mech. Eng. Part K-J. Multi-Body Dyn. 2021, 235, 338–352. [Google Scholar] [CrossRef]
- Zhao, S.F.; Wang, P.F.; Li, S.J. Study on the fault diagnosis method of scraper conveyor gear under time-varying load condition. Appl. Sci. 2020, 10, 5053. [Google Scholar] [CrossRef]
- Szewerda, K.; Świder, J.; Herbuś, K. Analysis of impact of longitudinal inclination of a chain conveyor on dynamical phenomena during operation. MATEC Web Conf. 2017, 94, 01010. [Google Scholar] [CrossRef]
- Li, L.; Cui, H.W.; Lian, Z.S.; Wang, Q.L. Modeling and optimization of soft start-up for hydroviscous drive applied to scraper conveyor. Math. Probl. Eng. 2019, 6131364. [Google Scholar] [CrossRef]
- Wang, Y.Y.; Bao, J.S.; Ge, S.R.; Yin, Y.; Wang, S.B.; Zhang, L. Simulation and experimental study on electromechanical coupling model of permanent magnet direct drive system for scraper conveyor. J. China Coal Soc. 2020, 45, 2127–2139. [Google Scholar]
- Dolipski, M.; Sobota, P. Porównanie rozruchu przenośnika zgrzebłowego ze sprzęgłami hydrokinetycznymi i podatnymi. Przegląd Górniczy 1992, 1–254. [Google Scholar]
- Dolipski, M. Ugleichmäßige Belastung von Antriebssystemen in kettengetriebenen Betriebsmitteln mit Kopf- und Heckantrieb. In Proceedings of the 5. Ingenieurtag am Fachbereich Maschinenbau der FH Trier.
- Dolipski, M.; Sobota, P. Porównanie rozruchu przenośnika zgrzebłowego ze sprzęgłami hydrokinetycznymi i podatnymi. Przegląd Górniczy 1992, 10. [Google Scholar]
- Dolipski, M. Dynamika górniczych przenośników zgrzebłowych; Zeszyty Naukowe Politechniki Śląskiej, Seria Górnictwo: Gliwice, Poland, 1989; Volume Z. 177. [Google Scholar]
- Dolipski, M. Dynamika przenośników łańcuchowych; Wydawnictwo Politechniki Śląskiej: Gliwice, Poland, 1997. [Google Scholar]
- Dolipski, M. Dynamika rozruchu ścianowych przenośników zgrzebłowych wyposażonych w sprzęgła hydrokinetyczne. Wiadomości Górnicze 1987, 11–12. [Google Scholar]
- Dolipski, M. Modelowanie i badania zespołów strugowych; Wydawnictwo Politechniki Śląskiej: Gliwice, Poland, 1993. [Google Scholar]
- Sobota, P. BW-592/RG-2/98/T-9; Identyfikacja i określenie możliwości redukcji przeciążeń zespołów napędowych w przenośnikach ścianowych. Gliwice, Poland, 1998.
- Klein, M. Vibration Damping in Mechanical Systems; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Bickford, J.H. Introduction to the Design and Behavior of Bolted Joints; CRC Press, Taylor & Francis Group Ltd.: London, UK, 2008. [Google Scholar]
- Brychta, P. Antriebstechnische Möglichkeiten zur Verbesserung des Schweranlaufs von Kettenkratzerförderern. Glückauf 1984, 12. [Google Scholar]

| Parameter | Unit | Configuration No 1 | Configuration No 2 | Change, % |
|---|---|---|---|---|
| MSPA,max | kNm | 6.56 | 5.15 | 21.5 |
| AMSPA | kNm | 5.56 | 2.79 | 49.8 |
| MSPB,max | kNm | 4.75 | 4.45 | 6.3 |
| AMSPB | kNm | 2.84 | 0.41 | 85.6 |
| F11A,max | kN | 557.93 | 510.26 | 8.5 |
| AF11A | kN | 293.76 | 172.53 | 41.3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license.



