
Submitted:
10 December 2025
Posted:
11 December 2025
You are already at the latest version
Abstract
Reaction–diffusion equations provide a fundamental framework for modelling spatial population dynamics and invasion processes in mathematical biology. Among these, the Fisher equation combines diffusion with logistic growth to describe the spread of an advantageous gene and the formation of travelling population fronts. In this work, we investigate the one-dimensional Fisher equation using Lie symmetry analysis to obtain a deeper analytical understanding of its wave propagation behaviour. The Lie point symmetries of the governing partial differential equation are derived and used to construct similarity variables that reduce the Fisher equation to ordinary differential equations. These reduced equations are then solved by a combination of direct integration and the tanh method, yielding explicit invariant and travelling–wave solutions. Symbolic computations in MAPLE are employed throughout to compute the symmetries, verify the reductions, and generate illustrative plots of the resulting wave profiles. The obtained solutions capture sigmoidal fronts connecting stable and unstable steady states, providing clear information about wave speed and shape. Overall, the study demonstrates that Lie group methods, combined with hyperbolic-function techniques, offer a powerful and systematic approach for analysing Fisher-type reaction–diffusion models and interpreting their biologically relevant invasion dynamics.
Keywords:
Lie symmetries
; reaction–diffusion equations
; Fisher equation
; travelling–wave solutions
; invariant solutions
; similarity reductions
; tanh method
; nonlinear differential equations
1. Introduction
Reaction–diffusion equations form an essential mathematical framework for modelling spatial population dynamics, chemical kinetics, nerve propagation, and biological invasion phenomena [1,2]. In ecological and population genetics, they describe how local reaction mechanisms, such as growth and competition, interact with spatial diffusion to generate travelling fronts, invasion waves, and patterned structures [3].
One of the most classical and influential models of this class is the Fisher equation, introduced by Fisher in 1937 to describe the spread of an advantageous gene in a population [4] and independently developed by Kolmogorov, Petrovsky, and Piskunov in the same year [5]. In its general reaction–diffusion form, the Fisher (or Fisher–KPP) equation is written as
where denotes the population density, x is the spatial coordinate, and t is time. For the standard Fisher model, the nonlinear reaction term is logistic,
leading to the well–known logistic Fisher equation
The Fisher equation admits travelling–wave solutions with sigmoidal profiles that describe the advance of a stable state into an unstable one, a phenomenon central to population genetics, ecology, and chemical propagation modelling [2,3]. Foundational discussions of travelling fronts and related biological applications can be found in Murray [2]. Explicit travelling–wave solutions for special parameter values, most notably the classical Ablowitz–Zeppetella solution, highlight the mathematical richness of the model [6]. Further insights into wave propagation and nonlinear diffusion have been presented in the works of Aronson and Weinberger [7], Feroe [8], and Zinner [9], among others.
Over the years, a variety of analytical and numerical techniques have been applied to Fisher–type equations. Loyinmi and Akinfe [10] obtained exact solutions for a family of Fisher reaction–diffusion equations using the Elzaki homotopy transformation method. Mittal and Jain [11] developed numerical solutions based on a modified cubic B–spline collocation scheme. Wavelet and spectral-type approaches for reaction–diffusion problems were reviewed by Hariharan and Kannan [12], while Salas et al. [13] investigated reaction–diffusion equations in a chemical context. More recently, Yang and Pan [14] constructed new solitary–wave solutions of the Fisher equation using a Riccati-type ansatz combined with direct algebraic techniques.
Lie symmetry analysis provides a rigorous and systematic framework for studying nonlinear differential equations by exploiting their invariance properties under continuous transformation groups. Classical references, including Arrigo [15], Bluman and Anco [16], Bluman and Kumei [17], Hydon [18], Ibragimov [19], and Ovsiannikov [20], establish the theoretical foundations of symmetry methods and their applications to reaction–diffusion models. For constructing exact travelling–wave solutions, tanh and extended tanh methods have been widely used in conjunction with symmetry reductions [21,22].
In this study, we conduct a Lie symmetry analysis of the one–dimensional Fisher reaction–diffusion equation. We determine its infinitesimal generators, derive similarity reductions, and solve the resulting reduced ordinary differential equations to obtain explicit invariant and travelling–wave solutions. The analysis illustrates the effectiveness of Lie symmetry techniques in producing analytically tractable and biologically meaningful solutions for Fisher–type reaction–diffusion systems.
2. Finding the Symmetries of the Fisher’s Equation
The Lie symmetry method determines the invariance of partial differential equations under continuous transformation groups, enabling systematic reductions to simpler forms [18]. In this section, we apply Lie symmetry analysis to the standard Fisher equation,
We consider the infinitesimal transformations
with the associated infinitesimal generator
Using MAPLE and the PDEtools package, the infinitesimal functions for the Fisher equation were computed as
From these infinitesimals, we obtain the corresponding symmetry generators:
These generators represent time-translation and space-translation symmetries, respectively.
2.1. Commutator of the Symmetries
The infinitesimal generators
are the two Lie point symmetries of the Fisher’s equation. The commutator (or Lie bracket) of two vector fields is defined as
Since partial derivatives commute, we have
which implies that
The vanishing of the commutator, , shows that the two symmetries commute. This means:
- The order in which the symmetries are applied does not matter.
- The symmetry algebra generated by and is Abelian.
- These symmetries may be used independently to reduce the PDE, or in combination (e.g., as a linear combination for a travelling–wave variable ).
2.2. Invariant Solution Using
We seek an invariant solution under the Lie point symmetry generator
This symmetry corresponds to invariance under time translations. To find an invariant solution, we use the method of characteristics. The associated characteristic system is
We get the two invariants
and the group–invariant solution is given by
Hence, the invariant solution takes the form
We now substitute the invariant form into Fisher’s equation
Since u depends only on x, the time derivative vanishes,
The spatial derivatives become
Substituting these gives
The reduced Equation is a nonlinear second–order equation and cannot be solved using standard techniques such as separation of variables, integrating factors, or other familiar methods for linear ODEs. Nonlinear equations of this form are difficult to handle analytically and require specialised approaches. In this work, we attempt to obtain an exact solution using the Tanh method.
We apply the tanh method by introducing the transformation
where . Since
this substitution allows derivatives of f to be rewritten in terms of T. A balance of the highest powers in the ODE shows that the solution should take the form of a quadratic polynomial in T, so we assume
where and k are constants to be determined.
Differentiating the ansatz using the chain rule gives
Differentiating again, we set
so that
Computing gives
Therefore, the second derivative becomes
and expanding yields
Next, we expand the nonlinear reaction term. Substituting the polynomial ansatz gives
Substituting the expressions for and into the reduced ODE
and simplifying gives
Equating coefficients of like powers of T gives the algebraic system:
Solving begins with the first condition
If , then
and the constant–term equation
gives the two equilibrium solutions
To obtain a nonconstant solution we take . Substituting into
gives
so
Using and in the quadratic condition
yields
Dividing by gives
hence
Substituting into the final condition
leads to
Multiplying by 4 and simplifying gives
so
Substituting back gives
Hence the polynomial becomes
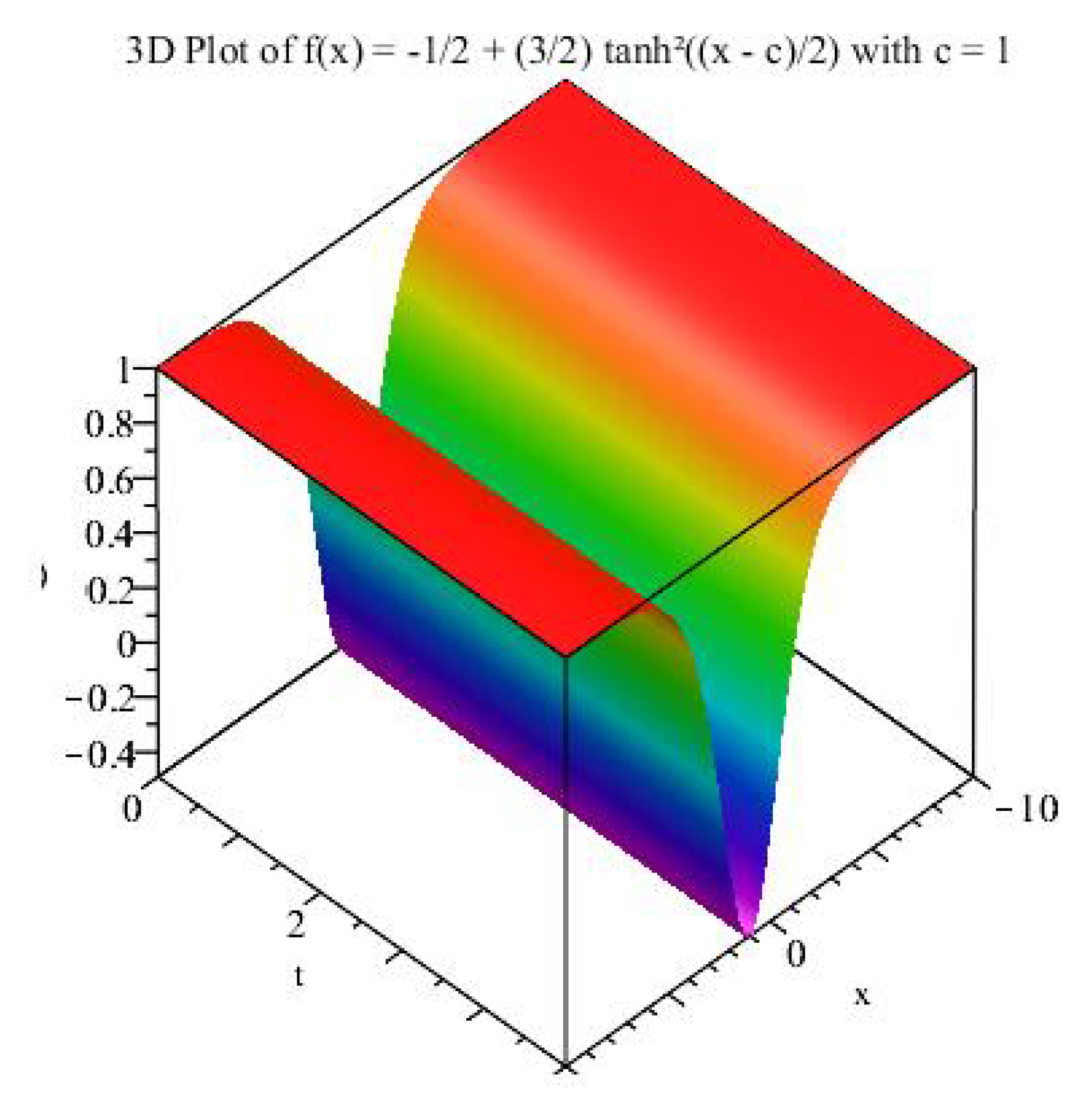
With and , we obtain the explicit invariant solution
Since the reduced ODE is autonomous, a translation in x produces the one–parameter family
where is a translation constant.
Figure 1.
3D Steady-State Invariant Solution Surface Corresponding to .
2.3. Invariant Solution Using
We seek an invariant solution under the Lie point symmetry generator
This symmetry corresponds to invariance under spatial translations. To find an invariant solution, we use the method of characteristics. The associated characteristic system is
We obtain the two invariants
and the group–invariant solution is given by
Hence, the invariant solution takes the form
We substitute the invariant form into the Fisher’s equation,
Since u depends only on t, all spatial derivatives vanish
Hence, the PDE reduces to the ODE
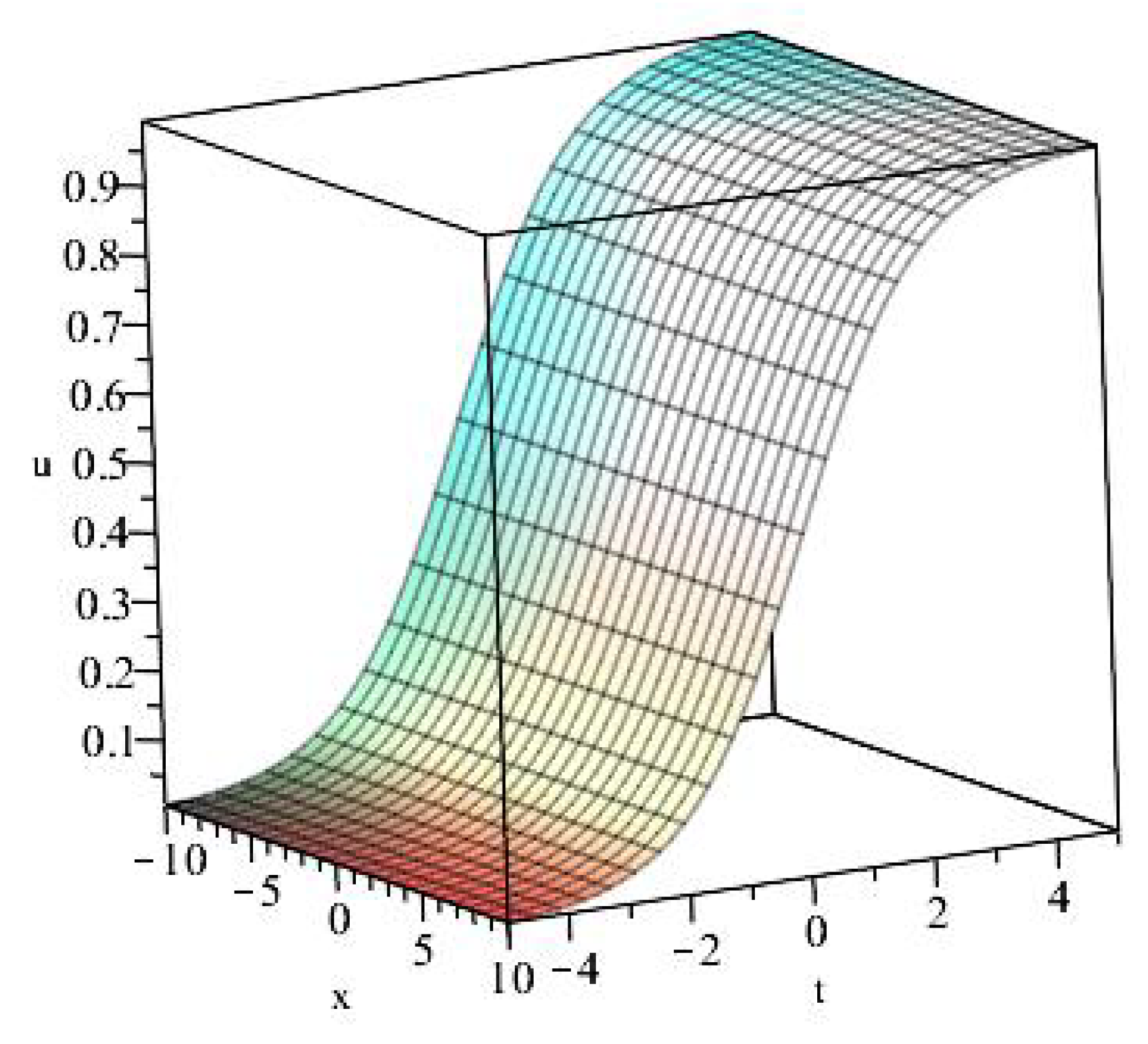
which is the logistic equation. Solving this equation using separation of variables, we obtain the explicit solution,
where is an arbitrary constant of integration.
This solution represents a spatially uniform logistic growth model. As time progresses, the population density increases and asymptotically approaches the equilibrium value .
Figure 2.
3D Logistic Growth Surface Corresponding to the Symmetry
2.4. Invariant Solution Using The Travelling-Wave Symmetry
We seek an invariant solution under the Lie point symmetry generator
This symmetry corresponds to invariance under a travelling–wave transformation. To find an invariant solution, we use the method of characteristics. The associated characteristic system is
We obtain the two invariants
and the group–invariant solution is given by
Hence, the invariant variable is,
and the solution can be written as
We substitute the invariant form , with , into Fisher’s equation
Using the chain rule
Substituting these into the PDE yields,
To obtain an exact solution of the nonlinear ODE
we apply the tanh method. The idea is to express the solution in terms of a polynomial in the hyperbolic tangent function. We introduce the transformation
where . Since
this substitution allows the derivatives of f to be rewritten in terms of T. A balance of the highest powers in the ODE shows that the solution should take the form of a quadratic polynomial in T, so we assume
where and k are constants to be determined.
Differentiating the ansatz using the chain rule gives
Differentiating again, we set
so that
Computing gives
Therefore, the second derivative becomes
and expanding yields
Next, we expand the nonlinear reaction term. Substituting the polynomial ansatz gives
For later use, we also write in expanded form as
Substituting the expressions for , , and into the ODE
gives
Collecting like powers of T yields a polynomial identity
where
Since this identity must hold for every value of T, the coefficients must vanish:
Solving these equations begins with the first condition,
which gives either or .
Case 1:
Then the second equation reduces to
and the last equation becomes
so or . These yield the constant solutions
which are not travelling waves.
Case 2:
Substitute into the third-power condition
Dividing gives
and hence
Using these in the linear equation yields
Assuming , ,
so
Substituting into the quadratic condition reduces to
so
Finally, the constant-term equation becomes
Thus,
and
Taking for a right-moving wave gives
The coefficients are then
Hence, the polynomial becomes
with
Therefore, the explicit nonconstant travelling–wave solution of the ODE is
Since the reduced ODE is autonomous, a translation in z also produces a solution. Thus,
where is a translation constant.
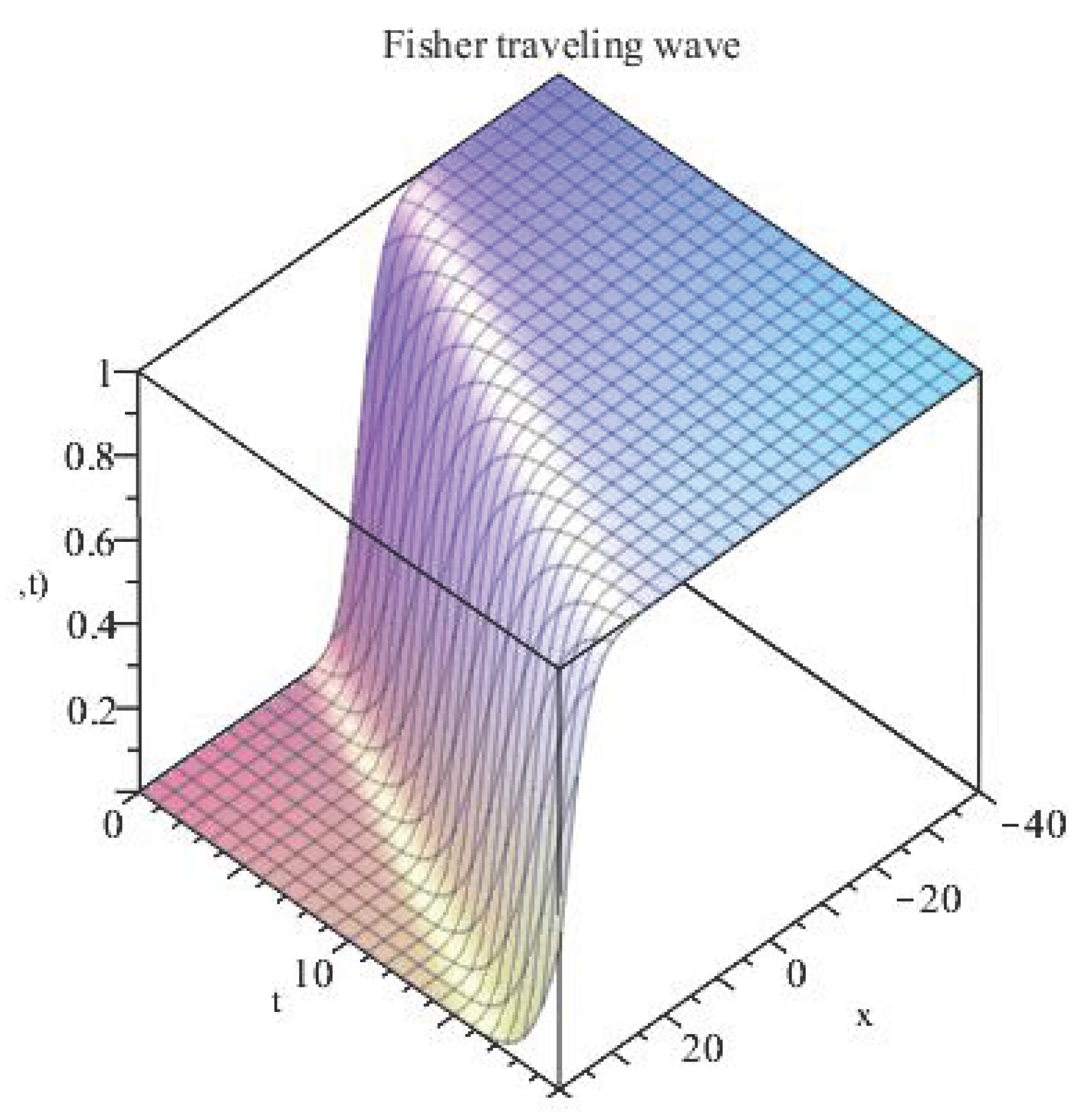
The obtained solution represents a travelling wave that connects the steady states and . It describes a smooth transition front moving to the right with constant speed . The solution models the propagation of a stable population invading an unstable region, with the wave maintaining its shape as it travels.
Figure 3.
3D plot of the Fisher travelling–wave solution, showing the wave front propagating in the positive x-direction.
Figure 3.
3D plot of the Fisher travelling–wave solution, showing the wave front propagating in the positive x-direction.
3. Conclusion
In this work, we applied Lie symmetry analysis to the one-dimensional Fisher reaction–diffusion equation and derived the corresponding symmetry reductions leading to invariant and travelling–wave solutions. The identified point symmetries enabled the systematic transformation of the governing PDE into reduced ODEs, which were solved explicitly to obtain closed-form wavefront profiles. These solutions capture the qualitative behaviour of propagating fronts commonly associated with Fisher-type models. The study demonstrates that Lie symmetry methods provide an effective analytical framework for simplifying nonlinear reaction–diffusion equations and extracting biologically meaningful travelling-wave solutions, offering valuable insight into the dynamics of invasion and population spread.
Author Contributions
Conceptualization, L.R. and P.M.; methodology, L.R. and P.M.; software, P.M.; validation, L.R.and P.M.; resources, L.R. and P.M.; writing—original draft preparation, P.M.; writing—review and editing, P.M. and L.R.; supervision, L.R.; funding acquisition, L.R. All authors have read and agreed to the published version of the manuscript.”
Funding
This work is based on the research supported in part by the National Research Foundation (NRF) of South Africa (Reference/Grant Number:CSUR240425215973). The authors acknowledge that opinions, findings and conclusions or recommendations expressed in this work is that of the authors alone, and that the NRF accepts no liability whatsoever in this regard.”
Informed Consent Statement
Not applicable.
Data Availability Statement
The original contributions presented in this study are included in the article. Further inguiries can be directed to the corresponding author.
Acknowledgments
The authors gratefully acknowledge the administrative and infrastructural support provided by the University of Limpopo, including computing resources, which facilitated the completion of this research.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Turing, A.M. The chemical basis of morphogenesis. Philosophical Transactions of the Royal Society of London B 1952, 237, 37–72. [Google Scholar]
- Murray, J.D. Mathematical Biology I: An Introduction, 3rd ed.; Springer: Berlin, 2007. [Google Scholar]
- Cosner, C. Reaction–diffusion equations and ecological modeling. In Tutorials in Mathematical Biosciences IV: Evolution and Ecology; Springer, 2008; pp. 77–115. [Google Scholar]
- Fisher, R.A. The wave of advance of advantageous genes. Annals of Eugenics 1937, 7(4), 355–369. [Google Scholar] [CrossRef]
- Kolmogorov, A.; Petrovsky, I.; Piskunov, N. Étude de l’équation de la diffusion avec croissance de la quantité de matière et son application à un problème biologique. Moscou Univ. Math. Bull. 1937, 1, 1–25. [Google Scholar]
- Ablowitz, M.J.; Zeppetella, A. Explicit solutions of Fisher’s equation for a special wave speed. Bulletin of Mathematical Biology 1979, 41(6), 835–840. [Google Scholar] [CrossRef]
- Aronson, D.G.; Weinberger, H.F. Nonlinear diffusion in population genetics, combustion, and nerve pulse propagation. In Partial Differential Equations and Related Topics; Springer, 1975; pp. 5–49. [Google Scholar]
- Feroe, J.A. Travelling wave solutions of the Nagumo equation. SIAM Journal on Applied Mathematics 1982, 42(2), 235–248. [Google Scholar] [CrossRef]
- Zinner, B. Existence of traveling wavefront solutions for the discrete Nagumo equation. Journal of Differential Equations 1992, 96(1), 1–27. [Google Scholar] [CrossRef]
- Loyinmi, A.C.; Akinfe, T.K. Exact solutions to the family of Fisher’s reaction–diffusion equation using Elzaki homotopy transformation perturbation method. Engineering Reports 2020, 2(2), e12084. [Google Scholar] [CrossRef]
- Mittal, R.C.; Jain, R.K. Numerical solutions of nonlinear Fisher’s reaction–diffusion equation with modified cubic B–spline collocation method. Mathematical Sciences 2013, 7(1), 12. [Google Scholar] [CrossRef]
- Hariharan, G.; Kannan, K. Review of wavelet methods for the solution of reaction–diffusion problems in science and engineering. Applied Mathematical Modelling 2014, 38(3), 799–813. [Google Scholar] [CrossRef]
- Salas, A.H.; Martínez, L.J.; Fernández, O. Reaction–diffusion equations: a chemical application. Scientia et Technica 2010, 3(46), 134–137. [Google Scholar]
- Yang, Z.; Pan, H. New solitary wave solutions of the Fisher equation. Journal of Applied Mathematics and Physics 2022, 10(11), 3356–3368. [Google Scholar] [CrossRef]
- Arrigo, D.J. Symmetry Analysis of Differential Equations: An Introduction; John Wiley & Sons, 2015. [Google Scholar]
- Bluman, G.; Anco, S. Symmetry and Integration Methods for Differential Equations; Springer Science & Business Media, 2008; volume 154. [Google Scholar]
- Bluman, G.W.; Kumei, S. Symmetries and Differential Equations; Springer Science & Business Media, 2013; volume 81. [Google Scholar]
- Hydon, P.E. Symmetry Methods for Differential Equations: A Beginner’s Guide; Cambridge University Press: Cambridge, 2000. [Google Scholar]
- CRC Handbook of Lie Group Analysis of Differential Equations; Ibragimov, N.H., Ed.; CRC Press: Boca Raton, FL, 1996; Vol. 1. [Google Scholar]
- Ovsiannikov, L.V. Group Analysis of Differential Equations; Academic Press: New York, 2014. [Google Scholar]
- Hereman, W.; Malfliet, W. The tanh method: a tool to solve nonlinear partial differential equations with symbolic software. In Proceedings of the 9th World Multi-Conference on Systemics, Cybernetics and Informatics, Orlando, FL, 2005; pp. 165–168. [Google Scholar]
- Hendi, A. The extended tanh method and its applications for solving nonlinear physical models. IJRRAS 2010, 3(1), 83–91. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



