
Submitted:
20 November 2025
Posted:
21 November 2025
You are already at the latest version
Abstract
Boundary value problems for systems of integrodifferential equations appear in all branches of science and engineering. Accuracy in modeling complex processes requires the specification of nonlocal boundary conditions, including multipoint and integral conditions. These kinds of problems are even harder to solve. In this paper, we present solvability criteria and a direct operator method for constructing the exact solution to systems of linear ordinary integrodifferential equations with general nonlocal boundary conditions. Several examples are solved to demonstrate the effectiveness of the method. The results equally apply to nonlocal boundary value problems for systems of ordinary differential, loaded differential, and loaded integrodifferential equations.
Keywords:
differential equations
; integrodifferential equations
; differential-boundary equations
; loaded differential equations
; systems of equations
; closed form solution
; multipoint boundary conditions
; integral boundary conditions
; nonlocal conditions
; fundamental matrix
MSC: 45J05; 47G20; 34B10; 34A30; 34K05
1. Introduction
Boundary value problems for ordinary differential equations, due to their importance in science and engineering, have been studied extensively by many researchers. Among others, Kiguradze [1] considered the general boundary value problem for a system of linear ordinary differential equations,
where , , and is a continuous linear transformation, and the corresponding homogeneous system
He proved that the problem (1), (2) is uniquely solvable if and only if
where Y is the fundamental matrix of the system (3) satisfying the condition
where E is the identity matrix. If (5) holds, then the solution x of the problem (1), (2) has the representation
where is the solution of the problem (3), (2) and G is the Greens’ matrix of the homogeneous problem (3), (4).
In this paper, we extend these results to the case of nonlocal boundary value problems for a system of linear ordinary integrodifferential equations,
where
are vectors of the unknown functions and their first-order derivatives, respectively,
are, respectively, and matrices of given functions,
are and vectors of the values of the linear bounded functionals and on , respectively, and
denote a vector of given forcing functions and a vector of constants, respectively. Also, throughout this paper, denotes the identity matrix and 0 is used to denote the scalar zero and the all-zero vector or matrix, as appropriate, without confusion.
It is note that, although only integrodifferential equations are investigated here, the Equations (6), (7) are more general and describe various types of nonlocal boundary value problems. Specifically, in the case where the functionals are integrals with fixed limits of the unknown vector x then (6) is a system of Fredholm Integro-Differential Equations (FIDEs). When the functionals are values of x at certain fixed points then (6) is a system of Differential-Boundary Equations [2] or Loaded Differential Equations (LDEs) [3]. In the case that , or , then (6) reduces to a system of Differential Equations (DEs).
The boundary functionals describe classical initial and boundary conditions and nonlocal conditions, which may be mixed and nonseparable conditions, multipoint boundary conditions involving a number of points in , and integral conditions. They can take the general form
where are matrices of continuous functions on , are constant matrices, c is an n-dimensional constant vector, and . The necessity and development of non-local boundary conditions in the modeling of complex physical situations is discussed in [4,5,6,7].
We prove existence and uniqueness criteria and provide a formula for the closed-form solution of the problem (6), (7). The analysis is based on the fundamental matrix Z of the homogeneous differential system . From a practical point of view, Z can always computed when the matrix A has constant coefficients and in several cases with variable coefficients. Solvability criteria of general linear boundary value problems for systems of Fredholm-type integrodifferential equations with degenerate kernels by other methods have also been reported in [8,9,10,11]. Closed-form solutions for nth-order FIDEs with nonlocal boundary conditions have been investigated in [12,13]. The exact solution to systems of first-order FIDEs with constant coefficients under general boundary conditions based on the matrix exponential has been studied in [14]. Approximate numerical methods for solving nonlocal boundary value problems for systems of FIDEs can be found in [15,16,17,18] and the references therein.
The paper is organized as follows. In Section 2, the problem is formulated in an operator form in a Banach space and some preliminary results are presented. The main results are given in Section 3 where two key theorems for the solvability of the problem are proved and a symbolic procedure for constructing the solution is presented. In Section 4, several examples are solved to demonstrate the application and effectiveness of the proposed technique. The conclusions are drawn in Section 5.
2. Preliminaries
Let denote a Banach space, namely the space of continuous functions or the Lebesgue space , with .
Let be the n-dimensional vector space of all column vectors with , and denote the space all x that have continuous first derivatives or the Sobolev space .
Let be the dual space of , i.e. the set of all linear bounded functionals defined on . We denote by the value of at and
where Z is matrix of functions with the column vectors . Note that for any constant vector c
Let the operator and and be its domain and range, respectively. The operator is said to be injective or uniquelly solvable if for all such that , follows that Recall that a linear operator is injective if and only if The operator is called surjective or everywhere solvable if The operator is called bijective if is both injective and surjective.
Definition 1.
The operator is said to be correct if is bijective and its inverse is bounded on .
Definition 2.
The problem is said to be well posed and hence uniquely and everywhere solvable, if the operator is correct.
Lemma 1.
Let the operator be defined by
where is a matrix of functions , and the boundary functional vector . Let be a fundamental matrix of the homogeneous equation satisfying , where denotes the identity matrix. Then:
- (i)
-
The operator defined byis correct and the unique solution of the equation for any is given bywhere is a fixed point in .
- (ii)
- In the case that ,
Proof. (i) It is well known that every solution of is given by
where c is a column vector of n arbitrary constants. Acting by the vector on both sides of (12) and taking into account that and , we obtain
Substituting c into (12), we get (10). Since (10) holds for any and is bounded it is concluded that is bounded on and hence the operator is correct.
3. Main Results
Let the operator be defined by
where the operator is defined in (9), denotes a matrix of functions , is a vector of the values of the functionals at x, is a vector of the values of the boundary functionals at x, and c is vector of n arbitrary constants. Then the problem (6), (7) can be expressed compactly as follows
We first consider the case with homogeneous boundary conditions . The following theorem provides conditions for the existence and uniqueness of the solution and the solution itself for this problem.
Theorem 1.
Let Lemma 1 holds. Let the operator be defined by
Then:
- (i)
-
The operator is injective if and only ifwhere W is a square matrix of order and the inverse operator is given in Lemma 1.
- (ii)
- When (16) holds, the unique solution of the problem for any is given by
Proof. (i) Assume that . Let the element . Then
since and the element because by using (8) and the relation .
Multiplying (18) by and rearranging terms we get
From (20) and (21) we construct the system of algebraic equations
or
where W is as in (16). Since it follows from (23) that and , so from (19) it is implied that and hence , i.e. is injective.
Conversely, let . Then there exists a nonzero constant vector such that
Consider the element and note that since [19]. Moreover, since from (24)
and also
This means that and hence the operator is not injective. Thus is injective if and only if .
(ii) We consider the nonhomogeneous system
We now prove the main theorem for the solution of the fully nonhomogeneous problem (14).
Theorem 2.
Let Lemma 1 holds and let the operator
Then:
- (i)
-
The operator is injective if and only ifwhere W is a square matrix of order and the inverse operator is given in Lemma 1.
- (ii)
- When (32) holds, the unique solution of the nonhomogeneous problem for any is given by
Proof.
Assume . Let any such that . Then
whence it follows that
or
From Theorem 1 it follows that and therefore which means that the operator is injective.
Conversely, assume . Let as above any such that . Then from (34) and Theorem 1 we conclude that is not injective. This means there is at least an element with , or equivalently , satisfying (34). Hence, the operator is not injective.
(ii) The solution of the nonhomogeneous problem can be obtained via the principle of superposition, i.e. as the sum of the solution of the problem and the solution of homogeneous problem . The former is given in (17) and latter is now computed below.
We write the homogeneous system as follows
from the fact that the element and the assumptions of Lemma 1 hold. Multiplying by and rearranging yields
In the case where the operator is just a differential operator of first order, i.e. when and , the following corollary holds.
Corollary 1.
Let the operator be defined by
Then:
- (i)
-
The operator is injective if and only ifwhere is square matrix of order n.
- (ii)
- Additionally, when (41) holds, the unique solution of for any is given by
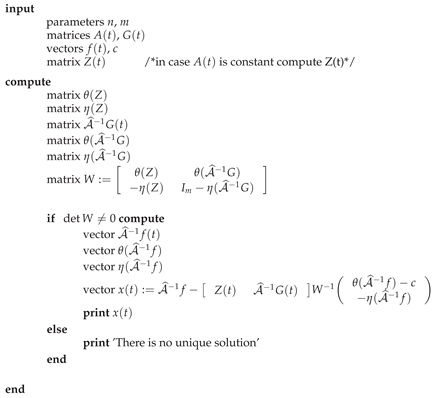
Finally, for the efficient implementation of Theorem 2 we provide the algorithm in Listing Listing 1.
| Listing 1. Algorithm for solving nonlocal linear boundary value problems in closed form. |
 |
4. Examples
In this section, selected nonlocal boundary value problems for differential and integrodifferential equations are solved to demonstrate the application of the method and its effectiveness. All calculations and visualizations were performed in the free, open-source computer algebra system Maxima.
4.1. Differential Equations
Example DE.1 The first problem we consider is a three-point boundary value problem presented by Na [20] and concerns the distribution of shear deformation of sandwich beams governed by the ordinary differential equation
where k and a are physical constants related to elastic properties of the beam, under the boundary conditions
corresponding to zero shear bimoment at the two free ends and the symmetry condition, respectively. This problem with and is used as a benchmark for validating numerical methods for multipoint boundary value problems in many studies [21,22,23].
By setting and the problem (43), (44) can be written as the system of three first-order differential equations
subject to homogeneous boundary conditions
To solve the system of equations (45), (46), we take , and write it in the operator form as in Corollary 1
where
We consider the auxiliary correct system as in Lemma 1
Since is a system of linear differential equations with constant coefficients, it is easy to find a fundamental matrix, for example,
which satisfies the equation .
Then, from the proposed algorithm, it follows that the system (45), (46) has a unique solution when
and in this case we get
which is the solution of the original boundary value problem (43), (44).
Example DE.2 Consider the system of two differential equations with variable coefficients,
for , subject to the boundary conditions
Consider the complementary system as in Lemma 1
It is known that the homogeneous system has the fundamental matrix
which satisfies the equation , see, for example, [24].
4.2. Integrodifferential Equations
Example IDE.1 In [25], a second order control problem for the dynamics of the rocket bank reduces to the second-order Fredholm integrodifferential equation
with the boundary conditions
where , , , are constants and .
With the transformation and we can reduce the problem (49), (50) to the following system of two first-order integrodifferential equations
subject to the boundary conditions
Let the complementary system in Lemma 1 be defined by
The fundamental matrix of the homogeneous system is
which satisfies .
Substituting into the Algorithm, we obtain that the system (51), (52) has a unique solution if and only if
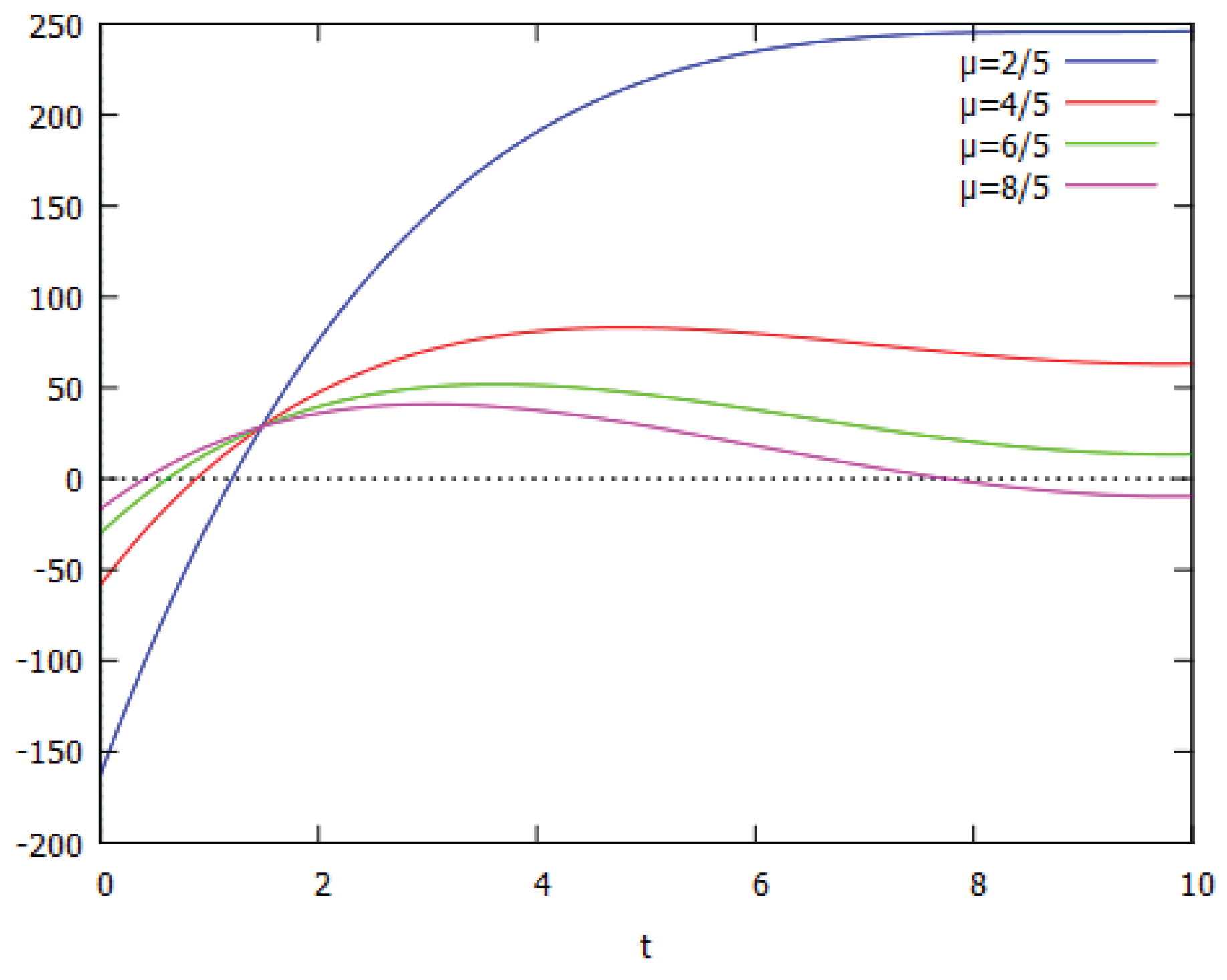
As a simple example, let , , , and . In this case the exact solution of the boundary value problem (49), (50) is
In the more complicated case for and the solution is illustrated for different values of in Figure 1.
Example IDE.2 Consider the following system of two second-order linear Fredholm integrodifferential equations
subject to the boundary conditions
This problem is solved numerically by the Tau method in [18].
To construct the exact solution by the method presented in the previous sections we use the transformation , , and and write the boundary value problem (54), (55) as a system of four first-order integrodifferential equations,
with the boundary conditions
In the space and for and , we write the boundary value problem (56), (57) in the operator form as in Theorem 2:
where
Let the complementary system in Lemma 1 be defined by
where, since the matrix A is constant, it is easy to construct a fundamental set of solutions of the homogeneous system , namely
which satisfies the equation .
5. Conclusions
Solvability criteria for general nonlocal boundary value problems for systems of linear ordinary integrodifferential equations of Fredholm type have been derived in a computationally convenient matrix form. A direct operator method for constructing their exact solution has also been presented. The method can be easily implemented in any Computer Algebra System (CAS). The main advantage is its ease of use and efficiency. Its disadvantage is the requirement of the fundamental matrix of the corresponding homogeneous differential system, which limits its application to cases where the matrix of coefficients is constant or is a matrix with variable coefficients of a special form [26].
The proposed method will be useful to many researchers as well as educational professionals in teaching advanced mathematics. Exact solutions are always necessary to validate numerical methods such as the finite element method [27,28,29,30,31], and others. The solvability criteria and the solution method derived here are equally applicable to nonlocal boundary value problems for linear ordinary loaded differential and integrodifferential equations and their systems.
Author Contributions
Conceptualization, E.P. and I.P.; methodology, E.P.; software, E.P.; validation, E.P., I.P. and J.M.; formal analysis, E.P. and I.P; writing—original draft preparation, E.P.; writing—review and editing, J.M.; visualization, E.P.; supervision, E.P. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable
Informed Consent Statement
Not applicable
Data Availability Statement
The data presented in this study are available on request from the corresponding author.
Conflicts of Interest
The authors declare no conflicts of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| DEs | Differential Equations |
| FIDEs | Fredholm integrodifferential Equations |
| LDEs | Loaded Differential Equations |
References
- Kiguradze, I.T. Boundary-value problems for systems of ordinary differential equations. J Math Sci 1988, 43, 2259–2339. [CrossRef]
- Krall, A.M. Differential-boundary operators. Trans. Amer. Math. Soc. 1971, 154, 429–458.
- Nakhushev, A.M. Loaded equations and their applications. Differ. Uravn. 1983, 19, 86–94. (in Russian).
- Byszewski, L. Theorems about the existence and uniqueness of solutions of a semilinear evolution nonlocal Cauchy problem. Journal of Mathematical Analysis and Applications 1991, 162(2), 494–505, . [CrossRef]
- Ntouyas, S.K. Chapter 6 Nonlocal Initial and Boundary Value Problems: A Survey. In Handbook of Differential Equations: Ordinary Differential Equations; A. Cañada, P. Drábek, A. Fonda, Eds.; North-Holland, 2006; pp. 461–557. [CrossRef]
- Štikonas, A. A Survey on stationary problems, Green’s functions and spectrum of Sturm–Liouville problem with nonlocal boundary conditions. Nonlinear Analysis: Modelling and Control 2014, 19:3, 301–334. [CrossRef]
- McKibben, M. Discovering Evolution Equations with Applications: Volume 1-Deterministic Equations, 1st ed.; Chapman and Hall/CRC, 2010; pp 393–403. [CrossRef]
- Samoilenko, A.M.; Boichuk, O.A.; Krivosheya, S.A. Boundary-Value problems for systems of integro-differential equations with Degenerate Kernel. Ukr Math J 1996, 48, 1785–1789. [CrossRef]
- Boichuk, A.A.; Zhuravlev,V.F. Solvability Criterion for Integro-Differential Equations with Degenerate Kernel in Banach Spaces. Nonlinear Dynamics and Systems Theory 2018, 18(4), 331–341. https://www.e-ndst.kiev.ua/v18n4/2(65)a.pdf.
- Bondar, I.A. Linear Boundary-Value Problems for Systems of Integrodifferential Equations with Degenerate Kernel. Resonance Case for a Weakly Perturbed Boundary-Value problem. J Math Sci 2023, 274, 822–832. [CrossRef]
- Aida-Zade, K.R.; Abdullayev V.M. To the solution of integro-differential equations with nonlocal conditions. Turkish Journal of Mathematics 2022 46(1), 177–188. [CrossRef]
- Providas, E.; Parasidis, I.N. A Procedure for Factoring and Solving Nonlocal Boundary Value Problems for a Type of Linear Integro-Differential Equations. Algorithms 2021, 14, 346. [CrossRef]
- Providas, E. On the Exact Solution of Nonlocal Euler–Bernoulli Beam Equations via a Direct Approach for Volterra-Fredholm Integro-Differential Equations. AppliedMath 2022, 2, 269-283. [CrossRef]
- Baiburin, M.M.; Providas, E. Exact Solution to Systems of Linear First-Order Integro-Differential Equations with Multipoint and Integral Conditions. In Mathematical Analysis and Applications, Springer Optimization and Its Applications 154; Rassias, T.M., Pardalos, P.M., Eds.; Springer Nature: Switzerland, 2019; pp. 1–16. [CrossRef]
- Styś, K.; Styś, T. A higher-order finite difference method for solving a system of integro-differential equations, Journal of Computational and Applied Mathematics 2000, 126(1-2), 33–46. [CrossRef]
- Zhao, J; Corless, R.M. Compact finite difference method for integro-differential equations. Applied Mathematics and Computation 2006, 177(1) 271–288. https://doi.org/10.1016/j.amc.2005.11.007.
- Ghasemi, M.; Fardi, M.; Moradi, E. A Reproducing Kernel Method for Solving Systems of Integro-differential Equations with Nonlocal Boundary Conditions. Iran J Sci Technol Trans Sci 2021, 45, 1375–1382. [CrossRef]
- Pour-Mahmoud, J.; Rahimi-Ardabili, M.Y.; Shahmorad, S., Numerical solution of the system of Fredholm integro-differential equations by the Tau method. Applied Mathematics and Computation 2005, 168(1), 465–478, . [CrossRef]
- Kokebaev, B.K.; Otelbaev, M.; Shynibekov, A.N. About Restrictions and Extensions of operators. D.A.N. SSSR. 1983, 271(6), 1307–1310. (Russian).
- Na, T.Y. Computational Methods in Engineering Boundary Value Problems; Publisher: Academic Press, New York, 1979.
- Haque, M.; Baluch, M.H.; Mohsen, M.F.N. Solution of multiple point, nonlinear boundary value problems by method of weighted residuals. International Journal of Computer Mathematics, 1986 19(1), 69–84. http://dx.doi.org/10.1080/00207168608803505.
- Liu, G.R.; Wu, T.Y. Multipoint boundary value problems by differential quadrature method. Mathematical and Computer Modelling 2002, 35(1-2), 215–227, . [CrossRef]
- Groza, G.; Pop, N. Approximate solution of multipoint boundary value problems for linear differential equations by polynomial functions. Journal of Difference Equations and Applications 2008, 14(12), 1289–1309. [CrossRef]
- Shirley, K.L.; Klima, V.W. Linear ODE Systems Having a Fundamental Matrix of the Form f(Mt). CODEE Journal, 2024 18(2). https://scholarship.claremont.edu/codee/vol18/iss1/2.
- Yuldashev, T.K. Nonlocal Boundary Value Problem for a Nonlinear Fredholm Integro-Differential Equation with Degenerate Kernel. Diff Equat 2018, 54, 1646–1653. [CrossRef]
- Moler, C.; Van Loan, C. Nineteen Dubious Ways to Compute the Exponential of a Matrix, Twenty-Five Years Later SIAM Review 2003, 45:1, 3–49. https://epubs.siam.org/doi/abs/10.1137/S00361445024180.
- Lewis, R.W.; Morgan, K.; Thomas, H.R.; Seetharamu, K.N. The Finite Element Method in Heat Transfer Analysis; John Wiley & Sons Ltd.: West Sussex, England, 1996.
- Chuanmiao, Chen; Tsimin, Shih Finite Element Methods for Integrodifferential Equations; World Scientific, 1998. https://www.worldscientific.com/doi/abs/10.1142/3594.
- Semper, B. Finite element approximation of a fourth order integro-differential equation. Applied Mathematics Letters 1994, 7(1), 59–62. [CrossRef]
- Shin, J.Y. Finite-element approximation of a fourth-order differential equation. Computers & Mathematics with Applications 1998, 35(8), 95–100. [CrossRef]
- Pinnola, F.P.; Vaccaro, M.S.; Barretta, R.; Sciarra, F.M. Finite element method for stress-driven nonlocal beams. Engineering Analysis with Boundary Elements 2022, 134, 22–34, . [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



