
Submitted:
12 November 2025
Posted:
13 November 2025
You are already at the latest version
Abstract
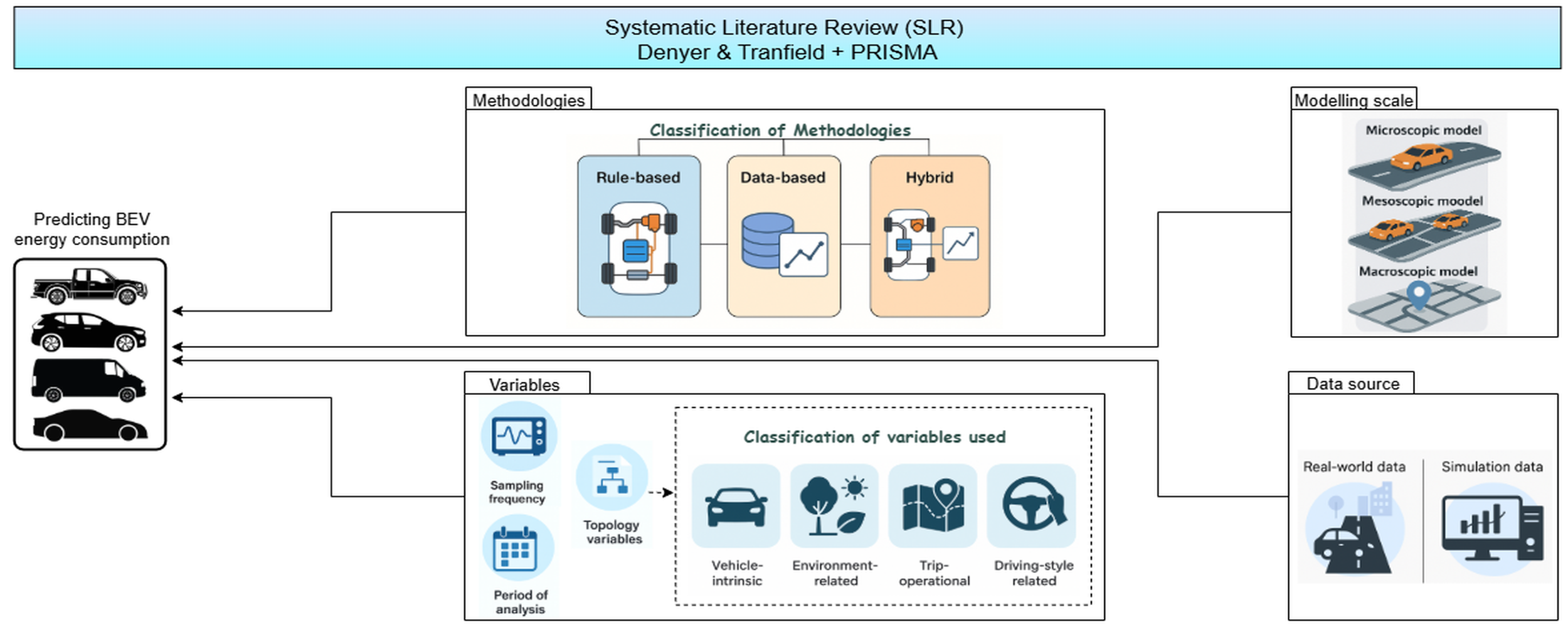
The prediction of energy consumption in battery electric vehicles (BEV) is a complex task due to the large number of influencing factors and their intercorrelation. However, it is a necessary endeavour to reduce range anxiety, facilitate route planning, manage charging infrastructure, and enable more effective travel decisions that lower operational risks in transportation; this would lead to greater adoption of BEV in the global vehicle fleet. In this regard, the present paper examines the available evidence on the methodologies employed for predicting the energy consumption of electric cars using the systematic literature review (SLR) protocol of Denyer and Tranfield together with the Preferred Reporting Items for Systematic Reviews and Meta-Analyses (PRISMA) statement for the selection and evaluation of studies. The analysis addresses modelling methods, computational tools employed, model accuracy metrics, the topology of the variables used, their sampling frequency and period of analysis, the modelling scale, and the data source. In addition, a classification of the different methodologies and variables is proposed, providing a reference framework for further studies. This article closes the research gap and complements previous literature, allowing the identification of current shortcomings and directions for future research related to energy consumption in BEV.
Keywords:
battery electric vehicles (BEV)
; energy consumption prediction
; systematic literature review
; modelling approaches
; variable topology
1. Introduction
The transport sector has been recognised as a major source of air pollution. In the US, 28% of anthropogenic greenhouse gas (GHG) emissions were associated with transport activities in 2022 [1]. In Europe, 23% of total CO2 emissions were due to road transport in 2022 [2]. Asia Pacific (AP) is the largest vehicle market in the world, led by China, Japan, South Korea, and India, where vehicle sales exceeded 7 million units in the first quarter of 2023 [3]; it is estimated that the vast majority of increases in global transport emissions will come from AP and that AP’s share of global transport emissions will continue to rise [4]. Globally, the transport sector is one of the main contributors to the increase in GHG emissions, accounting for more than 14% of total global emissions; the main concern is that, if this trend continues, GHG emissions from this sector are forecast to rise by up to 70% by 2050 [5]. To reduce these emissions, together with the dependence on fossil fuels, and to achieve a sustainable future, it is a priority to promote alternative transport sources such as battery electric vehicles (BEV) [6,7,8,9]. Electric cars use electricity, a secondary energy source that replaces fossil fuels and produces no emissions while driving [10]. The negative impact on the environment can be further mitigated, especially if the electricity is generated from renewable energy sources such as wind, solar, biomass, etc. [11].
Despite supply chain disruptions, macroeconomic and geopolitical uncertainty, and high prices of raw materials and energy, electric car sales recorded a record year in 2023, reaching 14 million units sold, 35% more than in 2022; this figure includes both BEV and plug-in hybrid electric vehicles (PHEV) [12]. Globally, around 40 million electric cars were on the road in 2023, nearly eight times more than in 2018, as shown in Figure 1; it is noteworthy that approximately 70% of the global stock of electric cars in 2023 were BEV. Going further, around 250,000 electric cars were sold each week in 2023, which is more than the total annual sales just a decade ago, in 2013. With respect to the global vehicle fleet, electric cars accounted for around 18% of all vehicles sold in 2023, compared with 14% in 2022 and only 2% in 2018.
Although the BEV market has experienced remarkable growth in recent years as a way to promote zero-emission transport, they still account for a small percentage of the global vehicle market [13]. In this regard, different market analysts forecast a high global penetration of BEV, expected to increase to 33% by 2040 and 50% by 2050, but they conclude that, at present, their share in the global vehicle fleet remains low [14]. In addition, most electric cars are concentrated in a few countries or regions with high market shares, such as China, which accounted for around 60% of newly registered electric cars in 2023, followed by Europe with 25% and the US with 10%. Together, these figures represent almost 95% of global electric car sales [12].
There are several risk factors responsible for this sluggish penetration of BEV into the market, mainly the following can be highlighted: the limited driving range of BEV compared to internal combustion engine vehicles (ICEV) due to low battery capacity [15,16]; insufficient charging infrastructure that does not guarantee successful trip completion and minimal or no delays in charging time [17]; the higher initial investment and maintenance costs of BEV, which are particularly driven by the high cost of batteries and uncertainty over future electricity prices [18,19]; and range anxiety, defined as the psychological anxiety experienced by a consumer and the perception that the BEV battery may be depleted during a trip before reaching the destination or a charging station [20,21]. In fact, range anxiety seriously affects users’ future route planning and greatly reduces consumer confidence in the use of BEV [22].
Conclusively, the operation of transport, both for passenger transfer and goods delivery, based on electric vehicles is constrained by their limited energy. More precisely, BEV range data are not directly extrapolable to every application scenario of such vehicles, since they are subject to certain externalities, namely: road conditions, itinerary, load, unforeseen events along the route, among others. This creates an uncertainty gap regarding BEV range and the energy required to complete the journey and ensure the fulfilment of the intended task. In this regard, a reliable estimation of BEV energy consumption is imperative to mitigate range anxiety, enable informed decision-making in transport planning and policy, and ultimately encourage the acceptance of BEV in the automotive market [22,23].
During BEV operation, energy consumption depends on a set of vehicle-specific factors, including size, weight, aerodynamics, efficiency, etc.; driving conditions and external environmental conditions also play an important role [22,24,25], as they change dynamically [26]. Several studies on BEV energy consumption models have been conducted. The modelling approaches presented in the literature can generally be classified from two perspectives, namely modelling scale and modelling methodology [27,28,29,30,31]. The modelling scale involves the temporal–spatial resolution of BEV energy consumption prediction results. In this regard, some authors focused on estimating the instantaneous rates of vehicle energy consumption from a microscopic perspective, for example, kWh per second [32,33,34], which provides higher accuracy in energy consumption estimation but relies on a large number of vehicle- and trip-specific characteristics [35], requiring instrumentation to monitor vehicle dynamic parameters as well as the powertrain [36]. Other authors estimated average energy consumption over an aggregated spatial or temporal span, i.e., from a mesoscopic and macroscopic perspective, either at trip level (e.g., kWh per kilometre), road-link level, daily, etc. [31,37,38,39]. The macroscopic modelling scale for the purpose of assessing vehicle energy consumption takes as a statistical object the traffic flow on the road network within a given geographic area, and time is generally measured in days, months, or years [40]. Macroscopic-scale models based on road networks are used to evaluate regional energy consumption in transport projects. Here, it is assumed that all vehicles consume similarly for the same average speed and vehicle miles travelled, and variation in second-by-second speed profiles and driver behaviour can be disregarded. Consequently, estimates differ significantly from reality [41]. On the other hand, the mesoscopic modelling scale is employed to calculate energy consumption along the entire road link, i.e., at the roadway level, and can achieve a comparative balance between the less accurate macroscopic methods and the data-intensive microscopic methods [42]. The mesoscopic driving-parameter-based energy consumption quantification model uses series of instantaneous vehicle driving data collected on a specific road segment, for example, with a fixed length (1 to 10 km) or duration (1 to 30 minutes). Then, the relevant model parameters, such as average speed and acceleration, are statistically calculated and their relationship with the average value of energy consumption is examined. The mesoscopic-scale model is mainly focused on calculating the energy consumption of vehicles on urban roads [40].
With regard to modelling methodology, it can be divided into three clearly differentiated groups, namely: rule-based models, data-driven models, and hybrids. Rule-based models (white-box approach) adopt some fundamental physical laws to simulate vehicle dynamics, powertrain operation, and the interactions of various vehicle system components in order to estimate energy consumption [43]. On the other hand, data-driven models (black-box approach) generally use data mining techniques to explore statistical relationships, or to identify patterns, between the input variables under study and energy consumption as the output variable, without the need to investigate or understand the physical process of electricity generation and consumption in BEV, nor even the interaction of the elements that make up the powertrain [44]. Drawing on the attributes and flexibility offered by each group, some studies combine both methodologies (grey-box approach), where variable selection is generally based on rules or knowledge, and statistical or machine learning (ML) models are applied to estimate energy consumption.
Although there are two literature reviews on BEV energy consumption models, none has adopted the methodology used in this work. On the one hand, in [45] the authors provide an overview of strategies for modelling the energy consumption of electric vehicles, offering an explanation and attributes of the vehicle model-based approach, the data-driven analysis approach, and the hybrid approach. Their review also considered hybrid electric vehicles (HEV), PHEV, and fuel cell electric vehicles (FCEV).
On the other hand, the authors in [29] present an overview of research efforts in the field of energy consumption estimation for electric vehicles. Energy consumption estimation models were reviewed in terms of influencing variables, modelling scale, and methodology. The properties of the data used for these models were also reviewed, including the data source, the type of vehicles modelled (car, truck, bus, train, or off-road vehicles), and the year of publication (2011–2019).
The main objective of this systematic literature review (SLR) is to synthesise the available evidence on the methodologies employed for predicting the energy consumption of electric cars, specifically including: modelling methods, computational tools employed, model accuracy metrics, the topology of the variables used, their sampling frequency and analysis period, the modelling scale, and the data source. This article bridges the research gap and complements previous literature, enabling the identification of directions for future research related to energy consumption in BEV. The remainder of this article is structured as follows: Section 2 provides background on the energy interaction taking place in the BEV powertrain; Section 3 presents a detailed description of the SLR method; Section 4 describes the results obtained; Section 5 discusses the findings; and finally, Section 6 presents the conclusions.
2. Background
BEV relies exclusively on the energy stored in its battery pack to power the traction system [46]. Therefore, its driving range depends on the battery energy capacity and a set of variables, namely: intrinsic vehicle characteristics, environment-related factors, trip-related attributes, and those associated with driving style. Figure 2 illustrates the typical configuration of a BEV powertrain. Energy consumption in a BEV involves the interaction of the following energy events:
- The energy required at the wheels to provide traction to the vehicle and overcome the resistances to motion during driving. In this case, the system operates by supplying energy to the electric motor so that it drives the wheels according to the accelerator pedal signal, which translates the driver’s power demand to the vehicle. During this operating mode, the state of charge (SoC) of the high-voltage battery decreases.
- The energy required to operate auxiliary devices (electric steering, heating, ventilation and air conditioning – HVAC, lighting, multimedia, etc.) stored in the low-voltage battery. For this purpose, the high voltage is previously converted into low voltage by means of the DC–DC converter.
- The energy losses in the powertrain components, since the motor cannot fully convert electrical energy into mechanical energy.
- Energy regeneration. In this case, the electric motor is used as a generator, recovering part of the vehicle’s kinetic energy and converting it into electrical energy to recharge the high-voltage battery. The system operates during braking or coasting of the vehicle, which increases the SoC of the high-voltage battery. The regenerated energy depends on the vehicle’s speed and deceleration, the battery’s ability to absorb energy, the brake structure, and the electric generator [47].
The battery management system (BMS), in harmony with the BEV controller, manages the energy flows, either unidirectional or bidirectional as appropriate, to meet the requirements of traction, auxiliary subsystem operation, vehicle charging process, and regenerative braking.
3. Method
The objective of this SLR is to provide a clear and comprehensive overview of the available evidence regarding the current state of methodologies employed to predict the energy consumption of electric cars. In this way, methodological concerns in the previous studies analysed can be identified, serving as input to improve future work in this research area of interest. An SLR must be explicit, rigorous, and reproducible [48], through the application of transparent protocols that allow synthesising and integrating the findings of diverse investigations [49]. In the present SLR, the protocol proposed by Denyer and Tranfield [50] was applied, comprising five steps: formulation of the research question, locating studies, study selection and evaluation, analysis and synthesis, and communication and use of the results.
3.1. Formulation of the Research Question
What are the methodologies employed to predict the energy consumption of electric vehicles?
3.2. Locating Studies
The search for studies to answer the research question was conducted in the SCOPUS and Web of Science (WoS) databases. The semantic structure, shown in Table 1, was defined based on three categories of search terms related to the topic and the research question, making use of a scientific thesaurus. These categories are explained below:
1) The first category addresses terms related to BEV.
2) The second category focuses on terms related to energy consumption.
3) The third category was intended for studies related to prediction.
The inclusion criteria forming part of the search strategy encompass studies written in English, with no restriction on the year of publication. In addition, original articles published in conference proceedings and indexed peer-reviewed journals were considered, provided that their purpose reflects methodologies for estimating the energy consumption of electric cars, i.e., passenger cars and vans.
The search was conducted in the fields: article title, abstract, and keywords in the SCOPUS database, while for the WoS database the field tag TS = Topic was used. In both cases, the search was carried out using all possible combinations of the three categories of terms. In this regard, the search script used to collect the scientific literature to answer the research question was constructed, as shown in Table 2; it is noted that the areas of knowledge of interest have been defined. The search was performed on 30 December 2024.
With regard to the exclusion criteria, studies that evaluated the incidence or effects of one or several factors, intrinsic or extrinsic to the vehicle, on its energy consumption were discarded. These included: impact of road gradient [51,52,53], impact of speed profile [54,55], impact of traffic [7,56], effect of ambient temperature [56,57,58,59,60], impact of auxiliary loads [61], effect of lateral dynamics [62], influence of driving style [56], effect of selected transmission [63,64], effect of the air conditioning system [65,66,67], effect of regenerative braking [68], effect of vehicle mass reduction [69], effect of environmental factors [70], impact of standardised driving cycles [71,72], effect of real driving conditions [72,73,74,75], and effect during vehicle acceleration [76]. These scientific articles did not focus exclusively on defining a methodology for predicting or estimating BEV energy consumption.
In addition, studies unrelated to battery electric vehicles, i.e., HEV, FCEV, and solar electric vehicles, were omitted. Finally, research carried out on buses, heavy-duty vehicles, scooters, bicycles, and in general all those not corresponding to passenger cars and vans were excluded.
3.3. Selection and Evaluation of Studies
For the selection and evaluation of studies, the Preferred Reporting Items for Systematic Reviews and Meta-Analyses (PRISMA) statement was applied. This statement consists of the following phases: identification, screening, eligibility, and inclusion [77]. The identification phase was explained in the previous section, allowing 834 articles to be located or identified, of which 381 corresponded to the SCOPUS database and 453 to WoS. Before carrying out the screening phase, 165 duplicate articles were removed, detected through the Mendeley reference manager, and 10 studies cited in the previously identified articles were included, resulting in a total of 679 studies. In the screening phase, the titles of the articles were reviewed, and 553 were excluded for not being relevant to the review topic, leaving 126 studies that were subsequently examined by abstract. At this point, 26 articles were excluded for not meeting the eligibility criteria, such as: not related to the study topic; not using electric cars; evaluating the incidence of one or more factors on BEV energy consumption. In the third phase, 100 publications were selected for full-text reading. However, 45 publications were excluded for not meeting the review criteria. Finally, in the fourth phase, 55 studies were included in the review. The process described is summarised in the flow diagram shown in Figure 3.
3.4. Analysis and Synthesis
In the first instance, each article was analysed according to the year and source of publication. Then, a series of axes of analysis and categories were defined to group the studies in order to answer the research question, including:
Axis of analysis 1 – methodology and methods; the categories considered are as follows:
- Methodologies for predicting BEV energy consumption (rule-based models, data-driven models, and hybrids).
- Computational tools used.
- Evaluation metrics of the prediction model (accuracy).
Axis of analysis 2 – variables used; the categories considered are as follows:
- Topology of variables used, including intrinsic vehicle variables, environment-related variables (environmental and road characteristics), trip-related attributes (operational), and those associated with driving style.
- Sampling frequency of variables.
- Analysis period.
Axis of analysis 3 – modelling scale; the categories considered are as follows:
- Microscopic-, mesoscopic-, and macroscopic-scale models.
Axis of analysis 4 – data source; the categories considered are as follows:
- BEV energy estimation models based on real-world data or simulation data.
The purpose of the synthesis is to define links between the parts identified in the selected studies, reconstructing information and developing new knowledge that is not evident in an isolated reading of the individual studies [50]. As mentioned in [10], the data extracted from the relevant articles for this study were explored, compared, and rigorously analysed in terms of the research question of the present SLR, given the importance of harmonising the synthesis with the objective of the review.
3.5. Communication and Use of Results
In this step, the results of the bibliographic search and their discussion are presented, thereby strengthening the knowledge base on the research topic. First, general information about the selected articles is described, namely: the year and source of publication. Then, tables and figures are used to present the different axes of analysis, the categories associated with each axis, the bibliographic references, and their frequency of occurrence. This step will be explained in detail in Section 4 and Section 5.
4. Results
This section presents the findings extracted from the 55 selected articles. First, general information about the relevant articles is described, namely: the year and source of publication. Then, the results of the axes of analysis and categories that address the research question are presented.
4.1. Year of Publication
Research on the estimation or prediction of energy consumption in electric cars is a relatively new topic in the literature. In 2014, the first studies appeared [78,79] in China and Korea, respectively. Most of the identified articles are recent, with 33 articles published in the last five years, representing 60% of all articles in the sample, as shown in Figure 4. In 2021, the highest number of publications was recorded, with 9 articles, equivalent to 16.3% of the total scientific articles.
4.2. Source of Publication
Table 3 shows the list of journals and conference proceedings corresponding to the selected scientific articles. The order of importance of the publication outlets was weighted using Equation 1, which encompasses the number of articles and the main metrics, such as: the impact factor (IF), the quartile ranking according to JCR (Journal Citation Report) and SJR (Scimago Journal Rank), and the h5-index from Google Scholar [80].
Ord = (# Artículos de investigación x 25%) (JCR IF) (SJR IF) (h5 index)
With regard to the publisher, Elsevier tops the list with 30.9% of publications, followed by MDPI with 21.8% and IEEE with 18.2%, as shown in Table 4.
4.3. Axis of Analysis 1 – Methodology and Methods
As shown in Table 5, the findings reveal a predominance of studies that use data-driven BEV energy modelling methods. In total, 25 models or techniques were identified, most of them based on machine learning (ML). Among these, Multiple Linear Regression (MLR) and Multilayer Perceptron (MLP) stand out, whose models were applied in 10 and 9 of the scientific articles reviewed, respectively. In addition, Extreme Gradient Boosting (XGBoost) appears in 7 studies. On the other hand, 17 articles opted for rule-based models, 15 represented by simulations and two by means of digital twins. With regard to hybrid models, 8 articles combined the features of rule-based and data-driven models.
Specifically, when observing Figure 5, the heterogeneity of data-driven models becomes evident, with MLR showing the highest frequency, as previously mentioned. At this point, it is important to note that there are scientific articles that apply more than one model to estimate BEV energy consumption, such as [100], which uses advanced ML models, XGBoost and LightGBM, to compare them with traditional models such as MLP and MLR. The results demonstrated that the first two models improved the prediction performance of BEV energy consumption. Another example is presented in [101], where the most robust validation indicators were exhibited for MLP when compared with GBM, RF, and MLR. In [106], it was concluded that XGBoost achieved better prediction accuracy for BEV energy consumption influenced by external vehicle parameters, with an R² of 0.92 compared to MLR and SVR. In [13], several ML techniques, namely XGBoost, MLP, RF, and SVR, were used to analyse the collected data and establish predictive models of BEV energy consumption, particularly in the context of urban route conditions. In [95], BEV energy consumption was estimated at the road-link level under real traffic congestion through two models, PR and MLP, where positive kinetic energy (PKE) and negative kinetic energy (NKE), as predictive variables, achieved more than 95% accuracy. In [99], MLP and DT were applied to address the nonlinear problem and the correlation between heterogeneous data involving BEV energy consumption. In [117], deep learning models, DNN and LSTM, were used for predicting BEV energy use. In [96], MLP and three different MLR models were used, varying the predictor variables to estimate the energy consumption of electric vehicles on a road link under real-world traffic conditions. The authors in [102] predicted a probability distribution for BEV trip energy consumption through PNN, achieving a mean absolute percentage error (MAPE) of 9.3% compared with other methods in the literature and deterministic neural networks. In [78], PR and ER were used to describe the relationship between BEV energy consumption rate and microscopic driving parameters in controlled environments. In [39], the efficiency of including static and dynamic features of a selected route for predicting BEV energy consumption was demonstrated using a DNN model, whose results outperformed MLR, KNN, SVR, XGBoost, and LightGBM models.
Likewise, studies have reported opting for complementary ML techniques to improve results. In [118] and [119], CNN was first applied, and the prediction was further refined by integrating ensemble learning (EL). Specifically, BDT was used through the “bagging” ensemble strategy, also known as bootstrap aggregating, for better model generalisation. EL involves multiple models combined in some way so that the ensemble model outperforms any of the individual models [125]. In [98], BEV energy consumption was estimated using MoE, an EL strategy based on neural networks [126]. The improvement of the combined predictive model compared to the base model, i.e., a monolithic neural network, was demonstrated. In [105], an ESG approach was presented for predicting BEV energy consumption. ESG, as an ML strategy, is a weighted combination of multiple base regression models, in this case, DT, RF, and KNN, improving the overall prediction and reducing variance compared to individual models. In [107], the authors proposed a model to accurately predict the energy consumption of new BEVs using TL, starting from a previous model based on MLR that considered data from conventional BEVs. In [101] and [114], GBM was applied, an EL strategy typically based on decision trees to build a more robust regression model. A single decision tree is a fast but unstable algorithm, easily affected by small perturbations in the training data, but its performance can be significantly improved by EL strategies [127]. Unlike “bagging”, where several models are trained independently, “boosting” trains models sequentially, each correcting the errors of the previous one. The authors in [103] innovatively applied four quantile-based ML algorithms for the accurate and reliable prediction of both BEV energy consumption and its associated uncertainties, where QRNN models outperformed QR, QEGBR, and QRF with an average prediction error of 5.04%. In [111], an energy consumption prediction framework integrating LSTM with the Transformer model was proposed, showing high accuracy with a MAPE of 4.63% compared with individual MLR and LSTM.
Based on the reviewed literature, rule-based models for predicting BEV energy consumption have been represented either through simulations or with digital twins (DT). DT have a broader scope compared with traditional simulations, since they integrate real-time data from the physical system, thereby enabling continuous interaction with it and dynamic optimisation [128]. In this regard, traditional simulations allow the analysis or prediction of a system’s behaviour based on models under specific initial conditions, whether historical or future, operating independently without the need to update their data in real time. The accuracy of rule-based models for predicting BEV energy consumption largely depends on the level of detail of the model and the nature of the variables. For instance, the authors in [82] developed a powertrain model, including the regenerative braking system, for a case study of a BMW i3. They considered the energy consumption of auxiliary devices; however, these were estimated from average values found in the literature. Similarly, efficiency values were interpolated across the full range of the electric motor based on efficiency maps available in the literature. One limitation of this study lies in the use of standard driving cycles, where slope is not included. The model proposed in [32], in an attempt to improve the estimation of BEV energy consumption, calculates the efficiency of regenerative braking using the instantaneous operating variables of the vehicle. The BEV energy consumption model presented in [84] comprises five parts: the vehicle dynamics model, the powertrain model, the regenerative braking model, the auxiliary system model, and the battery model. The parameters of these models were obtained through road tests and chassis dynamometer tests. The authors in [92] proposed a DT model to predict BEV energy consumption. However, only the effect of temperature in the model was modified in real time through the vehicle data monitoring platform. Other factors, namely vehicle speed, regenerative braking energy, rolling resistance, slope, etc., were not optimised in real time. Similarly, in [93], a DT model was developed considering the effects of different environmental and control parameters on BEV energy consumption; nevertheless, it shows certain limitations, for example, it does not integrate the battery cooling and heating functions, the air conditioning system, or the vehicle cold start process. Moreover, it was developed based on standardised driving cycles. Last but not least, the authors suggested that various topologies or configurations of BEV drivetrains should be implemented in the DT.
With regard to hybrid models, authors generally develop a rule-based approach to model vehicle dynamics, the powertrain, or the regenerative braking system. Then, by conveniently postulating the factors that could explain BEV energy consumption, they establish predictive models either from a traditional statistical perspective [41,79,120,122] or by employing ML models [44,121,123,124].
In the context of what has been outlined in the previous paragraphs, Figure 6 proposes a classification of the methodologies used to predict BEV energy consumption based on the reviewed articles. It is important to highlight that MLR, PR, ER, and QR can be classified either as traditional statistical regression models or as ML regression models. Nevertheless, there is a clear differentiation between these two approaches. On the one hand, traditional statistical models focus on inference, seeking to establish causal relationships and to understand the underlying structure of the data. That is, it is assumed that the expert knows beforehand how the predictor variables relate to the predicted variable in order to formulate the statistical model, which simplifies the interpretation of results and facilitates the understanding of the relationships among variables. On the other hand, ML models are capable of handling complex interactions in large datasets to predict outcomes with higher accuracy, but these models require larger sample sizes for this purpose. Moreover, they often sacrifice interpretability compared to traditional statistics, since their primary goal is to optimise prediction accuracy [129].
Table 6 presents the computational tools and evaluation metrics used in the different articles reviewed. In contrast, Figure 7 shows that Matlab and Python are the most predominant computational tools. Moreover, it is important to note that most authors who develop rule-based models employ Matlab, while those who design data-driven models tend to prefer Python. With respect to the category “evaluation metrics”, the most frequently used are MAPE, RMSE, and R². As observed, some studies employ more than one metric to evaluate the accuracy of the proposed models. Such is the case of [115], which used MAE, MAPE, RMSE, and R² as evaluation metrics for their predictive models.
4.4. Axis of Analysis 2 – Variables Used
In BEV energy consumption, a series of external factors such as road topology, traffic, driving style, ambient temperature, etc., play a predominant role [130]. In contrast to what was mentioned, Table 7 and Figure 8 show that driving style-related variables are the most frequently used in predictive studies of energy consumption, with 52 records. On the other hand, vehicle-intrinsic variables have been classified into two subgroups. The first subgroup corresponds to variables related to vehicle dynamics, used in 49 scientific articles, involving the parameters that form part of the calculation of the power required at the wheels to move the vehicle against resistive forces. The second subgroup refers to variables related to vehicle components, appearing in 44 documents, with the efficiency of powertrain components and the use of auxiliary devices standing out, where the HVAC system is considered the most relevant factor; its use and impact on BEV energy consumption are largely determined by the local environment and the driver’s thermal comfort preferences [131]. Other auxiliary devices include lighting, electric power steering, infotainment system, etc., which are powered by the BEV’s low-voltage battery; the overall impact of these components on BEV energy consumption is smaller compared with the HVAC system [121].
Operational or trip-intrinsic variables are reported in 36 scientific articles. Finally, environment variables have been divided into two subgroups: road characteristics with 34 records and ambient conditions with 31 documents reporting their use.
Table 8 shows the breakdown of variables reported in the scientific articles, classified according to their topology. It is noteworthy that, within the group of operational variables, traffic and signalisation index are more frequently considered in articles employing data-driven models, since they are highly customised according to trip-intrinsic variables [44], where road segments or road networks are studied in detail. In contrast, articles that apply rule-based models use a greater number of vehicle-intrinsic variables, as they require a large amount of BEV-related parameters to explain the interaction of its systems and their contribution to energy consumption [115].
The monitoring and collection frequency of variables is subject to the research objectives and the nature of the experiment. Through data acquisition cards connected to the BEV’s OBDII port, data can be obtained at a frequency of 1 Hz, or even at higher frequencies. When, in the analysis of BEV energy consumption prediction, the same temporal or spatial interval of the variables monitored during the collection phase is used, they are referred to as disaggregated variables [29]. For example, in [32] the instantaneous energy consumption of a BEV was calculated using the original frequency of speed, acceleration, and road gradient data, monitored second by second. Similarly, in [120], from a physical and statistical perspective, the authors developed a systematic approach to estimating BEV energy consumption using the same frequency of monitored data on certain real driving conditions (speed, acceleration, and SoC), collected second by second on urban travel routes and considering other powertrain characteristics.
On the other hand, if the variables used in the predictive model are at a time interval different from that sampled during the collection phase, they are referred to as aggregated data or aggregated variables. For instance, [113] collected data from fifty-five electric taxis under real driving conditions with a sampling frequency of 1 Hz in Beijing during 2017 and 2018. Then, for energy consumption estimation, aggregated data covering ten minutes of driving were used, including time, vehicle speed and position, battery and motor current and voltage, SoC, and accumulated range. In addition, hourly temperature data were obtained from a weather website and combined with the driving data according to temporal alignment. The approach proposed in [119] used seven input variables monitored at a frequency of 10 Hz: vehicle speed and acceleration, ambient temperature, wind speed, auxiliary loads, road elevation, and initial battery SoC. Prior to performing BEV energy consumption estimation using CNN, the seven input variables were resampled to a frequency of 1 Hz.
Table 9 shows the scientific articles classified according to the sampling frequency of variables as well as the analysis period. In correspondence with Figure 9, it is evident that there is a predominance of studies that chose to monitor the variables of interest at a frequency of 1 Hz. Likewise, the analysis period (data acquisition) involved durations of less than one year in most of the reported studies.
4.5. Axis of Analysis 3 – Modelling Scale
Researchers have proposed several methodologies to estimate BEV energy consumption by applying a defined modelling scale, namely: macroscopic, mesoscopic, and microscopic, according to their level of temporal and spatial granularity. Macroscopic-scale models can provide an estimation of the total energy consumption for the entire trip, including multiple connecting paths or the road network of a geographical area. Mesoscopic-scale models can allocate energy consumption to each path in a road network, with the possibility of subsequently defining the optimal driving route to the final destination [118]. Finally, microscopic models are more detailed and estimate instantaneous energy consumption (second by second), generally used in high-fidelity transport applications with detailed vehicle models and driving cycles [132]. Mesoscopic-scale energy consumption models represent a compromise between the imprecision of macroscopic-scale models and the amount of information required for microscopic-scale models [41]. According to Table 10 and Figure 10, there is a higher frequency of studies using microscopic-scale modelling, with 27 records, followed by macroscopic-scale modelling, considered in 19 documents.
4.6. Axis of Analysis 4 – Data Source
It is important to recommend an appropriate model for predicting BEV energy consumption by considering the various intrinsic and extrinsic vehicle factors based on real-world driving data. This can significantly reduce users’ range anxiety, facilitating route planning and effective travel decisions [105]. The benefit of using real-world measurements lies in achieving a more realistic estimation of vehicle energy consumption [108]. Some BEV energy consumption estimation models are established on data collected from chassis dynamometer tests, which do not reflect the real characteristics of BEV energy consumption during operation, particularly regenerative braking in deceleration mode [41]. For example, the model in [93] uses data based on the New European Driving Cycle (NEDC) and mentions the limitation of the study in not considering road gradient, driving habits, and, therefore, real driving cycles. In [86], the developed model was tested on a standard FTP75 driving cycle and on a test driving cycle obtained for a realistic route. In [89], a simplified BEV energy consumption model based on vehicle specific power (VSP) was presented and evaluated on standardised driving cycles. According to Table 11 and Figure 11, there is a predominance of studies using real-world data in their models.
5. Discussion and Suggestions for Future Work
BEVs have a limited driving range compared with conventional vehicles, causing drivers to fear running out of energy while driving. To overcome this problem and increase the daily usability of these vehicles, more accurate range estimation techniques are being investigated. Nevertheless, an accurate BEV energy consumption model is crucial to obtain more reliable estimators of the remaining range, which to date are still not sufficiently precise [82]. Since accurate range estimation critically depends on modelling the actual energy consumption of BEVs [98], it must be considered that this is not a trivial task, as it is influenced by a series of factors: vehicle-intrinsic, environment-related, trip-operational, and driving-style related. In this regard, accurate BEV energy consumption estimation requires precise models that take all these factors into account and seek to reduce uncertainties in the estimation [133]. In fact, there is a scarcity of studies that combine multiple internal and external BEV factors to predict its consumption; therefore, if prediction results are to be improved, the influence of an increasingly significant number of factors should be closely analysed and examined [100].
Rule-based BEV energy consumption estimation models usually consider the vehicle’s longitudinal dynamics to calculate the wheel power required to overcome motion resistances; in addition, they take into account the impact of auxiliary devices, numerous parameters, and powertrain component efficiencies [36]. Nevertheless, the efficiency map, for example of the electric motor, is not always available [32,85], and reducing certain model parameters—such as component efficiencies—to predetermined constants increases the uncertainty of the results. Another point to consider in these models is the energy resulting from the regenerative braking system, which is often modelled as a linear function of vehicle speed or as a function of deceleration. Furthermore, these models require detailed speed profiles or properly defined driving cycles as input variables for estimation [87,134]. Each driving cycle is constructed to describe the characteristics of a vehicle in a specific context—road, driver behaviour, and traffic flow—with the aim of evaluating, for example, energy consumption, range, and equivalent emissions of a BEV [121]. Although high-frequency driving cycles (approximately 1 Hz) are fundamental for determining energy consumption at high resolution, it is not practical to collect such driving cycles along with numerous vehicle parameters under real driving conditions, since external hardware and monitoring equipment would have to be installed in each vehicle [135]. That is, the application of these energy consumption prediction models becomes particularly complicated when dealing with a large number of vehicle models and large-scale fleets [113], making their use more suitable for specific vehicle models and particular routes, where the path and BEV applicability are known in advance. In the same direction, although this rule-based model proves to be more accurate than data-driven models [82,130,136], it involves costly calculations, allowing integration into more complex frameworks and often depending on laboratory-derived parameters [120]. Nevertheless, its accuracy is subject to the level of detail of the model, which may be too generic—leading to significant estimation errors—or overly complex [44,91].
On the other hand, in the context where it is difficult to incorporate the multiple influencing factors and quantitatively analyse their respective effects on BEV energy consumption from the perspective of the vehicle’s underlying mechanisms, data-driven energy consumption prediction models emerge as an alternative option [113]. These models are usually based on statistics or ML in order to derive linear or non-linear relationships between different factors or input variables and the vehicle’s energy consumption. Unlike statistical models, ML models are more powerful and offer self-adaptive behaviour that improves the desired results [137] through empirical learning and iterative optimisation [113]. Nevertheless, in many studies related to data-driven models, the energy consumption due to auxiliary devices—which can significantly reduce BEV efficiency and range—is not considered [82]. Another point to consider is that these models require more computational effort than rule-based models due to the large volume of data they handle. In fact, the trend in these models is to employ an increasingly larger amount of big data to improve prediction accuracy [114]. Likewise, these models differ in the extent to which they can engage with the underlying physical principles and vehicle speed profiles [108]; that is, the physical meaning of selected variables and the interpretation of such models are not justifiable, since they operate with a black-box approach [44]. Narrowing down this point, these models often neglect vehicle dynamics, which plays an important role in energy consumption [86]. On the other hand, data-driven models consider a greater number of trip-operational and environment-related variables compared with rule-based models, which rely more on vehicle-intrinsic and driving-style variables. Moreover, these models can be satisfactory for specific conditions, since they are tailored to their particular characteristics (training dataset and specific scenario); however, their applicability or extensibility to another situation is questionable [44]. In other words, they only work for those road network segments that have already been driven and for specific vehicle models that have already been monitored, reducing their flexibility [132].
It is important to recommend an appropriate model for predicting BEV energy consumption by considering the diversification of factors based on real-world trip data, with extremely detailed information collected on vehicle operation along the route [122]. The benefit of using real-world measurements is a more realistic estimation of vehicle energy consumption [108]. In fact, the use of monitored on-road data, as opposed to synthetic data from simulations or from standardised driving cycles on chassis dynamometers, provides more realistic BEV energy consumption values [138]. On the other hand, model granularity plays a predominant role, where microscopic models, unlike mesoscopic and macroscopic ones, are more accurate, since they estimate energy consumption instantaneously, second by second, and are therefore useful for high-fidelity simulations with BEV models and detailed driving cycles [132]. For example, the authors in [122] reported that data monitored at low frequency (once per minute) generate uncertainty regarding the variation of vehicle energy consumption within these time intervals. Similarly, in [111], data sampled at a low frequency, 0.05 Hz, were used, highlighting the limitation of model performance and generalisation capacity. Analogously, in macroscopic- and mesoscopic-scale models, due to the high degree of temporal and spatial aggregation, it is difficult to represent subtle changes in vehicle energy consumption during driving [40]. In this regard, the microscopic approach allows for capturing variations in energy consumption more accurately than considering the average of an entire trip [13]. In light of the above, the challenge in BEV routing problems is that they require the precision of microscopic models to predict energy consumption, but the detailed driving cycle is not known beforehand and must be defined [132]. Conclusively, modelling BEV instantaneous energy consumption under real-world conditions poses a major challenge due to variability and uncertainty, even for the same vehicle under identical driving conditions [36]. Likewise, it is advisable to analyse the impact of traffic, as one of the trip-operational conditions, on BEV energy consumption at the microscopic level [114], especially as it causes wide divergences in driver behaviour or driving style [139]. Concomitantly, accurately assessing the influence of such parameters on vehicle energy consumption can be complex and costly; however, in the absence of measured data on traffic information and locally distributed congestion levels, vehicle speed and acceleration patterns implicitly capture the effects of stochastic traffic conditions on BEV on-road energy consumption [115].
6. Conclusions
Currently, transport operation, both for passenger transfer and goods delivery, based on BEVs is constrained by their limited energy. A variety of externalities, such as load, traffic, itinerary, unforeseen events along the route, and road conditions, among others, make BEV range data non-extrapolable to every transport application scenario. This generates uncertainty regarding BEV range and the energy required to complete the desired journey and ensure the fulfilment of the intended task. In this context, reliable prediction of BEV energy consumption becomes an imperative task to reduce range anxiety, facilitate route planning, manage charging infrastructure, and support more effective travel decisions. The conclusions derived from the literature analysis on predicting energy consumption in electric cars are summarised as follows:
- -
- There is a greater number of studies using data-driven energy modelling methods, most of which involve ML rather than traditional statistics, since they are capable of handling complex interactions in large datasets and predicting outcomes with higher accuracy. However, these models require larger sample sizes, which increases computational effort. Moreover, ML models often sacrifice interpretability compared with traditional statistics, as their main goal is to optimise prediction accuracy. Likewise, these models do not aim to understand the physical process of electricity generation and flow in BEVs, nor the interaction of powertrain components.
- -
- Rule-based models are more accurate than data-driven models; however, this accuracy depends on the level of model detail, which may lead to greater complexity, as they attempt to explain the interaction of powertrain components and their contribution to energy consumption. These models have been represented either through simulations or with DT, the latter having a broader scope as they integrate real-time data from the physical system, enabling continuous interaction and dynamic optimisation.
- -
- In hybrid models, a rule-based approach is generally developed to model vehicle dynamics, the powertrain, or the regenerative braking system. Then, by conveniently postulating the factors that may explain BEV energy consumption, predictive models are established either from a traditional statistical perspective or by employing ML models.
- -
- BEV energy consumption is dynamic and depends on vehicle-intrinsic variables (those related to vehicle dynamics and unit components), environment-related variables (ambient conditions and road characteristics), operational variables, and driving-style variables. When developing appropriate models for predicting BEV energy consumption, it is preferable to use real-world driving data rather than synthetic data or data obtained from laboratory tests, as this provides a more accurate estimation in line with actual journeys.
- -
- Microscopic-scale models are more accurate than mesoscopic- and macroscopic-scale models, as they allow for estimating instantaneous energy consumption. However, their high level of temporal and spatial granularity requires detailed vehicle models and driving cycles.
Author Contributions
J.C.-C wrote, and his supervisor E.L.P. supervised this manuscript. All authors have read and agreed to the published version of the manuscript.
Funding
This research did not receive any specific grant from funding agencies in the public, commercial, or not-for-profit sectors.
Data Availability Statement
Data will be made available on request.
Conflicts of Interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Nomenclature
| Abbreviation Full Term | |
| BDT | Bagged Decision Tree |
| BEV | Battery Electric Vehicles |
| BMS | Battery Management System |
| CNN | Convolutional Neural Networks |
| DNN | Deep Neural Networks |
| DT | Decision Tree |
| DTW | Digital Twin |
| ER | Exponential Regression |
| ESG | Ensemble Stacked Generalisation |
| FCEV | Fuel Cell Electric Vehicles |
| GBM | Gradient Boosting Machines |
| GHC | Anthropogenic Greenhouse Gas |
| HVAC | Heating, Ventilation and Air Conditioning |
| ICEV | Internal Combustion Engine Vehicles |
| KNN | k-Nearest Neighbours |
| LightGBM | Light Gradient Boosting Machine |
| LSTM | Long Short-Term Memory Networks |
| LMM | Linear Mixed Models |
| ML | Machine Learning |
| MLP | Multilayer Perceptron |
| MLR | Multiple Linear Regression |
| MNN | Multifunctional Neural Networks |
| MoE | Mixture of Experts |
| NKE | Negative Kinetic Energy |
| PKE | Positive Kinetic Energy |
| PNN | Probabilistic Neural Networks |
| PR | Polynomial Regression |
| PRISMA | Preferred Reporting Items for Systematic Reviews and Meta-Analyses |
| PHEV | Plug-in Hybrid Electric Vehicles |
| QEGBR | Quantile Extreme Gradient Boosted Regression |
| QRF | Quantile Regression Forests |
| QRNN | Quantile Regression Neural Networks |
| RF | Random Forest |
| RLS | Recursive Least Squares |
| SLR | Systematic Literature Review |
| SoC | State of Charge |
| SVR | Support Vector Regression |
| TL | Transfer Learning |
| XGBoost | Extreme Gradient Boosting |
References
- United States Environmental Protection Agency (EPA), “Fast Facts: U.S. Transportation Sector Greenhouse Gas Emissions, 1990-2022,” May 2024. Accessed: Mar. 11, 2025. [Online]. Available: https://nepis.epa.gov/Exe/ZyPDF.cgi?Dockey=P101AKR0.pdf.
- European Environment Agency (EEA), “Annual European Union greenhouse gas inventory 1990-2022 and inventory document 2024,” Copenhagen, Dec. 2024. Accessed: Mar. 11, 2025. [Online]. Available: https://www.eea.europa.eu/en/analysis/publications/annual-european-union-greenhouse-gas-inventory.
- German Association of the Automotive Industry (VDA), “International passenger car markets clearly up after first quarter.” [Online]. Available: https://www.vda.de/en/press/press-releases/2023/230419_PM_International-passenger-car-markets-clearly-up-after-first-quarter.
- X. He et al., “Asia Pacific road transportation emissions, 1900-2050,” Faraday Discuss, vol. 226, pp. 53–73, 2021. [CrossRef]
- M. E. Moeletsi, “Socio-Economic Barriers to Adoption of Electric Vehicles in South Africa : Case Study of the Gauteng Province,” World Electric Vehicule Journal, vol. 12, no. 167, pp. 1–11, 2021. [CrossRef]
- R. Rodrigues, V. Albuquerque, J. Ferreira, M. Sales, and A. Martins, “Mining Electric Vehicle Adoption of Users,” World Electric Vehicule Journal, vol. 12, no. 233, pp. 1–31, 2021. [CrossRef]
- T. Jonas, C. Hunter, and G. Macht, “Quantifying the impact of traffic on the energy consumption of electric vehicles,” World Electric Vehicule Journal, vol. 13, no. 15, pp. 1–12, 2022. [CrossRef]
- D. Huber, Q. De Clerck, C. De Cauwer, N. Sapountzoglou, T. Coosemans, and M. Messagie, “Vehicle to Grid Impacts on the Total Cost of Ownership for Electric Vehicle Drivers,” World Electric Vehicule Journal, vol. 12, no. 236, pp. 1–39, 2021. [CrossRef]
- V. Omahne, M. Knez, and M. Obrecht, “Social Aspects of Electric Vehicles Research — Trends and Relations to Sustainable Development Goals,” World Electric Vehicule Journal, vol. 12, no. 15, 2021. [CrossRef]
- G. Ivanova and A. C. Moreira, “Antecedents of Electric Vehicle Purchase Intention from the Consumer’s Perspective: A Systematic Literature Review,” Sustainability (Switzerland), vol. 15, no. 4, pp. 1–27, 2023. [CrossRef]
- J. L. Breuer, R. C. Samsun, D. Stolten, and R. Peters, “How to reduce the greenhouse gas emissions and air pollution caused by light and heavy duty vehicles with battery-electric, fuel cell-electric and catenary trucks,” Environ Int, vol. 152, no. January, p. 106474, 2021. [CrossRef]
- International Energy Agency (IEA), “Global EV Outlook 2024. Moving towards increased affordability,” Apr. 2024. Accessed: Mar. 11, 2025. [Online]. Available: https://iea.blob.core.windows.net/assets/a9e3544b-0b12-4e15-b407-65f5c8ce1b5f/GlobalEVOutlook2024.pdf.
- W. Achariyaviriya et al., “Estimating Energy Consumption of Battery Electric Vehicles Using Vehicle Sensor Data and Machine Learning Approaches,” Energies (Basel), vol. 16, no. 17, 2023. [CrossRef]
- J. D. A. Guerrero, B. Bhattarai, R. Shrestha, T. L. Acker, and R. Castro, “Integrating electric vehicles into power system operation production cost models,” World Electric Vehicle Journal, vol. 12, no. 263, pp. 1–22, 2021. [CrossRef]
- T. Schneidereit, T. Franke, M. Günther, and J. F. Krems, “Does range matter? Exploring perceptions of electric vehicles with and without a range extender among potential early adopters in Germany,” Energy Res Soc Sci, vol. 8, pp. 198–206, 2015. [CrossRef]
- A. Ghosh, “Possibilities and challenges for the inclusion of the electric vehicle (EV) to reduce the carbon footprint in the transport sector: A review,” Energies (Basel), vol. 13, no. 10, 2020. [CrossRef]
- M. S. Mastoi et al., “An in-depth analysis of electric vehicle charging station infrastructure, policy implications, and future trends,” Energy Reports, vol. 8, pp. 11504–11529, 2022. [CrossRef]
- K. Palmer, J. E. Tate, Z. Wadud, and J. Nellthorp, “Total cost of ownership and market share for hybrid and electric vehicles in the UK, US and Japan,” Appl Energy, vol. 209, no. July 2017, pp. 108–119, 2018. [CrossRef]
- D. Newbery and G. Strbac, “What is needed for battery electric vehicles to become socially cost competitive?,” Economics of Transportation, vol. 5, pp. 1–11, 2016. [CrossRef]
- L. Noel, G. Zarazua de Rubens, B. K. Sovacool, and J. Kester, “Fear and loathing of electric vehicles: The reactionary rhetoric of range anxiety,” Energy Res Soc Sci, vol. 48, no. April 2018, pp. 96–107, 2019. [CrossRef]
- T. Capuder, D. Miloš Sprčić, D. Zoričić, and H. Pandžić, “Review of challenges and assessment of electric vehicles integration policy goals: Integrated risk analysis approach,” International Journal of Electrical Power and Energy Systems, vol. 119, pp. 1–12, 2020. [CrossRef]
- H. Wei, C. He, J. Li, and L. Zhao, “Online estimation of driving range for battery electric vehicles based on SOC-segmented actual driving cycle,” J Energy Storage, vol. 49, no. 104091, 2023. [CrossRef]
- W. Li, R. Long, H. Chen, and J. Geng, “A review of factors influencing consumer intentions to adopt battery electric vehicles,” Renewable and Sustainable Energy Reviews, vol. 78, no. May 2016, pp. 318–328, 2017. [CrossRef]
- B. Yu, J. Yang, D. Wang, J. Shi, and J. Chen, “Energy consumption and increased EV range evaluation through heat pump scenarios and low GWP refrigerants in the new test procedure WLTP,” INTERNATIONAL JOURNAL OF REFRIGERATION, vol. 100, pp. 284–294, 2019. [CrossRef]
- J. Castillo-Calderón, D. Cordero-Moreno, and E. Larrodé Pellicer, “A Model-Driven Approach for Estimating the Energy Performance of an Electric Vehicle Used as a Taxi in an Intermediate Andean City,” Energies (Basel), vol. 17, no. 23, Dec. 2024. [CrossRef]
- H. A. Yavasoglu, Y. E. Tetik, and K. Gokce, “Implementation of machine learning based real time range estimation method without destination knowledge for BEVs,” Energy, vol. 172, pp. 1179–1186, 2019. [CrossRef]
- C. Fiori, K. Ahn, and H. A. Rakha, “Microscopic series plug-in hybrid electric vehicle energy consumption model: Model development and validation,” Transp Res D Transp Environ, vol. 63, pp. 175–185, 2018. [CrossRef]
- K. N. Genikomsakis, G. Mitrentsis, D. Savvidis, and C. S. Ioakimidis, “Energy consumption model of electric scooter for routing applications: Experimental validation,” in IEEE Conference on Intelligent Transportation Systems, Proceedings, ITSC, ERA Net-Zero Energy Efficiency on City Districts, NZED’ Unit, Research Institute for Energy, University of Mons, Mons, Belgium: Institute of Electrical and Electronics Engineers Inc., 2017, pp. 1–6. [CrossRef]
- Y. Chen, G. Wu, R. Sun, A. Dubey, A. Laszka, and P. Pugliese, “A Review and Outlook on Energy Consumption Estimation Models for Electric Vehicles,” SAE International Journal of Sustainable Transportation, Energy, Environment, & Policy, vol. 2, no. 1, 2021. [CrossRef]
- F. C. López and R. Á. Fernández, “Predictive model for energy consumption of battery electric vehicle with consideration of self-uncertainty route factors,” J Clean Prod, vol. 276, 2020. [CrossRef]
- J. Vepsäläinen, K. Otto, A. Lajunen, and K. Tammi, “Computationally efficient model for energy demand prediction of electric city bus in varying operating conditions,” Energy, vol. 169, pp. 433–443, 2019. [CrossRef]
- C. Fiori, K. Ahn, and H. A. Rakha, “Power-based electric vehicle energy consumption model: Model development and validation,” Appl Energy, vol. 168, pp. 257–268, 2016. [CrossRef]
- S. Modi, J. Bhattacharya, and P. Basak, “Estimation of energy consumption of electric vehicles using Deep Convolutional Neural Network to reduce driver’s range anxiety,” ISA Trans, vol. 98, no. xxxx, pp. 454–470, 2020. [CrossRef]
- A. Fotouhi, N. Shateri, D. S. Laila, and D. J. Auger, “Electric vehicle energy consumption estimation for a fleet management system,” Int J Sustain Transp, vol. 15, no. 1, pp. 40–54, Nov. 2020. [CrossRef]
- T. Kirschstein and F. Meisel, “GHG-emission models for assessing the eco-friendliness of road and rail freight transports,” Transportation Research Part B: Methodological, vol. 73, pp. 13–33, 2015. [CrossRef]
- Z. Zhai, L. Zhang, G. Song, X. Li, and L. Yu, “Modeling energy consumption for battery electric vehicles based on in-use vehicle trajectories,” Transp Res D Transp Environ, vol. 137, Dec. 2024. [CrossRef]
- C. Zhang, F. Yang, X. Ke, Z. Liu, and C. Yuan, “Predictive modeling of energy consumption and greenhouse gas emissions from autonomous electric vehicle operations,” Appl Energy, vol. 254, no. March, p. 113597, 2019. [CrossRef]
- H. Wang, D. Zhao, Q. Meng, G. P. Ong, and D.-H. Lee, “Network-level energy consumption estimation for electric vehicles considering vehicle and user heterogeneity,” TRANSPORTATION RESEARCH PART A-POLICY AND PRACTICE, vol. 132, pp. 30–46, Feb. 2020. [CrossRef]
- H. Yılmaz and B. Yagmahan, “Electric vehicle energy consumption prediction for unknown route types using deep neural networks by combining static and dynamic data,” Appl Soft Comput, vol. 167, Dec. 2024. [CrossRef]
- Y. Chen, S. Li, and Y. Li, “A Review on Quantitative Energy Consumption Models from Road Transportation,” Energies (Basel), vol. 17, no. 1, 2024. [CrossRef]
- R. Zhang and E. Yao, “Mesoscopic model framework for estimating electric vehicles’ energy consumption,” Sustain Cities Soc, vol. 47, May 2019. [CrossRef]
- H. Rakha, H. Yue, and F. Dion, “VT-Meso model framework for estimating hotstabilized light-duty vehicle fuel consumption and emission rates,” Canadian Journal of Civil Engineering, vol. 38, no. 11, pp. 1274–1286, 2011. [CrossRef]
- Y. Pan, W. Fang, and W. Zhang, “Development of an energy consumption prediction model for battery electric vehicles in real-world driving: A combined approach of short-trip segment division and deep learning,” J Clean Prod, vol. 400, no. 136742, 2023. [CrossRef]
- F. Ye, G. Wu, K. Boriboonsomsin, and M. J. Barth, “A Hybrid Approach to Estimating Electric Vehicle Energy Consumption for Ecodriving Applications,” in 2016 IEEE 19TH International Conference on Intelligent Transportation Systems (ITSC), 345 E 47TH ST, NEW YORK, NY 10017 USA: IEEE, 2016, pp. 719–724.
- A. Di Martino, S. M. Miraftabzadeh, and M. Longo, “Strategies for the Modelisation of Electric Vehicle Energy Consumption: A Review,” Energies (Basel), vol. 15, no. 21, Nov. 2022. [CrossRef]
- F. Alanazi, “Electric Vehicles: Benefits, Challenges, and Potential Solutions for Widespread Adaptation,” Applied Sciences (Switzerland), vol. 13, no. 10, May 2023. [CrossRef]
- M. Ansarey, M. Shariat Panahi, H. Ziarati, and M. Mahjoob, “Optimal energy management in a dual-storage fuel-cell hybrid vehicle using multi-dimensional dynamic programming,” J Power Sources, vol. 250, pp. 359–371, Mar. 2014. [CrossRef]
- K. A. Baker and S. M. Weeks, “An overview of systematic review,” Journal of Perianesthesia Nursing, vol. 29, no. 6, pp. 454–458, 2014. [CrossRef]
- A. P. Siddaway, A. M. Wood, and L. V. Hedges, How to Do a Systematic Review: A Best Practice Guide for Conducting and Reporting Narrative Reviews, Meta-Analyses, and Meta-Syntheses, vol. 70, no. January. 2019. [CrossRef]
- D. Denyer and D. Tranfield, “Producing a Systematic Review,” The SAGE Handbook of Organizational Research Methods, pp. 671–689, 2009.
- K. Liu, T. Yamamoto, and T. Morikawa, “Impact of road gradient on energy consumption of electric vehicles,” Transp Res D Transp Environ, vol. 54, pp. 74–81, 2017. [CrossRef]
- S. C. Yang, M. Li, Y. Lin, and T. Q. Tang, “Electric vehicle’s electricity consumption on a road with different slope,” Physica A: Statistical Mechanics and its Applications, vol. 402, pp. 41–48, 2014. [CrossRef]
- A. Graser, J. Asamer, and W. Ponweiser, “The elevation factor: Digital elevation model quality and sampling impacts on electric vehicle energy estimation errors,” in 2015 International Conference on Models and Technologies for Intelligent Transportation Systems, MT-ITS 2015, 345 E 47TH ST, NEW YORK, NY 10017 USA: IEEE, 2015, pp. 81–86. [CrossRef]
- A. Desreveaux, A. Bouscayrol, R. Trigui, E. Castex, and J. Klein, “Impact of the Velocity Profile on Energy Consumption of Electric Vehicles,” IEEE Trans Veh Technol, vol. 68, no. 12, pp. 11420–11426, 2019. [CrossRef]
- G. Wager, J. Whale, and T. Braunl, “Driving electric vehicles at highway speeds : The effect of higher driving speeds on energy consumption and driving range for electric vehicles in Australia,” Renewable and Sustainable Energy Reviews, vol. 63, pp. 158–165, 2016. [CrossRef]
- A. Donkers, D. Yang, and M. Viktorovic, “Influence of driving style, infrastructure, weather and traffic on electric vehicle performance,” TRANSPORTATION RESEARCH PART D-TRANSPORT AND ENVIRONMENT, vol. 88, Nov. 2020. [CrossRef]
- J. B. Wang, K. Liu, T. Yamamoto, and T. Morikawa, “Improving Estimation Accuracy for Electric Vehicle Energy Consumption Considering the Effects of Ambient Temperature,” in Energy Procedia, J. Yan, F. Sun, S. K. Chou, U. Desideri, H. Li, P. Campana, and R. Xiong, Eds., in Energy Procedia, vol. 105. SARA BURGERHARTSTRAAT 25, PO BOX 211, 1000 AE AMSTERDAM, NETHERLANDS: ELSEVIER SCIENCE BV, 2017, pp. 2904–2909. [CrossRef]
- K. Liu, J. Wang, T. Yamamoto, and T. Morikawa, “Exploring the interactive effects of ambient temperature and vehicle auxiliary loads on electric vehicle energy consumption,” Appl Energy, vol. 227, no. SI, pp. 324–331, Oct. 2018. [CrossRef]
- P. Iora and L. Tribioli, “Effect of ambient temperature on electric vehicles’ energy consumption and range: Model definition and sensitivity analysis based on Nissan Leaf data,” World Electric Vehicle Journal, vol. 10, no. 1, 2019. [CrossRef]
- G. Lee, J. Song, Y. Lim, and S. Park, “Energy consumption evaluation of passenger electric vehicle based on ambient temperature under Real-World driving conditions,” Energy Convers Manag, vol. 306, Apr. 2024. [CrossRef]
- K. Unni and S. Thale, “Influence of Auxiliary Loads on the Energy Consumption of Electric Vehicle - A Case Study,” in 2021 IEEE Transportation Electrification Conference, ITEC-India 2021, Institute of Electrical and Electronics Engineers Inc., 2021. [CrossRef]
- S. Kumari, S. Ghosh, A. R. Hota, and S. Mukhopadhyay, “Energy Consumption of Electric Vehicles: Effect of Lateral Dynamics,” in IEEE Vehicular Technology Conference, Institute of Electrical and Electronics Engineers Inc., 2023. [CrossRef]
- G. Wager, M. P. McHenry, J. Whale, and T. Bräunl, “Testing energy efficiency and driving range of electric vehicles in relation to gear selection,” Renew Energy, vol. 62, pp. 303–312, 2014. [CrossRef]
- N. Hinov, P. Punov, B. Gilev, and G. Vacheva, “Model-Based Estimation of Transmission Gear Ratio for Driving Energy Consumption of an EV,” Electronics (Basel), vol. 10, no. 13, Jul. 2021. [CrossRef]
- M. Schweizer, M. Stöckl, R. Tutunaru, and U. Holzhammer, “Influence of heating, air conditioning and vehicle automation on the energy and power demand of electromobility,” Energy Conversion and Management: X, vol. 20, 2023. [CrossRef]
- A. Sagoian, B. O. Varga, and S. Solodushkin, “Energy Consumption Prediction of Electric Vehicle Air Conditioning System Using Artificial Intelligence,” in Proceedings - 2021 Ural Symposium on Biomedical Engineering, Radioelectronics and Information Technology, USBEREIT 2021, Institute of Electrical and Electronics Engineers Inc., 2021, pp. 379 – 382. [CrossRef]
- A. Doyle and T. Muneer, “Energy consumption and modelling of the climate control system in the electric vehicle,” Energy Exploration and Exploitation, vol. 37, no. 1, pp. 519–543, 2019. [CrossRef]
- K. Sarrafan, K. M. Muttaqi, D. Sutanto, and G. Town, “Improved Estimation of the Impact of Regenerative Braking on Electric Vehicle Range,” in 2016 IEEE INTERNATIONAL CONFERENCE ON POWER SYSTEM TECHNOLOGY (POWERCON), 345 E 47TH ST, NEW YORK, NY 10017 USA: IEEE, 2016.
- G. Sandrini, M. Gadola, D. Chindamo, A. Candela, and P. Magri, “Exploring the Impact of Vehicle Lightweighting in Terms of Energy Consumption: Analysis and Simulation,” Energies (Basel), vol. 16, no. 13, 2023. [CrossRef]
- Z. Yi and P. H. Bauer, “Effects of environmental factors on electric vehicle energy consumption: A sensitivity analysis,” IET Electrical Systems in Transportation, vol. 7, no. 1, pp. 3–13, Mar. 2017. [CrossRef]
- S. S. Suryavanshi and P. M. Ghanegaonkar, “Repercussion of effect of different drive cycles on evaluation of electrical consumption for electric four-wheeler to achieve optimal performance of electric vehicle,” Energy Storage, vol. 5, no. 7, Oct. 2023. [CrossRef]
- J. Merchán, L. Gonzalez, and J. Espinoza, “Energy Efficiency of an Electric Vehicle in a Latin American Intermediate City,” in Smart Energy Systems and Technology (SEST 2018), 2018, pp. 1–6. [CrossRef]
- I. Komorska, A. Puchalski, A. Niewczas, M. Ślęzak, and T. Szczepański, “Adaptive driving cycles of evs for reducing energy consumption,” Energies (Basel), vol. 14, no. 9, 2021. [CrossRef]
- J. Castillo-Calderón, D. Díaz-Sinche, R. Carrión, A. Sigüenza, and J. Cabrera, “Energy Consumption of a Battery Electric Vehicle Used for City-Airport Trips: a Case Study in an Andean Region,” in 2023 IEEE Seventh Ecuador Technical Chapters Meeting (ECTM), IEEE, 2023, pp. 1–6. [CrossRef]
- J. Diaz, J. Guillén, D. Arroyo, and M. Maks, “Performance Evaluation of an Electric Vehicle in Real Operating Conditions of Quito , Ecuador,” in 4th International Congress of Automotive and Transport Engineering (AMMA 2018), 2018, pp. 328–337. [CrossRef]
- Q. Liu, Z. Zhang, and J. Zhang, “Research on the interaction between energy consumption and power battery life during electric vehicle acceleration,” Sci Rep, vol. 14, no. 1, Dec. 2024. [CrossRef]
- M. J. Page, J. E. McKenzie, P. M. Bossuyt, I. Boutron, and T. C. Hoffmann, “The PRISMA 2020 statement: an updated guideline for reporting systematic reviews,” Rev Esp Cardiol, vol. 74, no. 9, pp. 790–799, 2021. [CrossRef]
- E. Yao, M. Wang, Y. Song, and Y. Zhang, “Estimating energy consumption on the basis of microscopic driving parameters for electric vehicles,” Transp Res Rec, vol. 2454, no. 2454, pp. 84–91, 2014. [CrossRef]
- N. Chang, D. Baek, and J. Hong, “Power Consumption Characterization, Modeling and Estimation of Electric Vehicles,” in 2014 IEEE/ACM INTERNATIONAL CONFERENCE ON COMPUTER-AIDED DESIGN (ICCAD), in ICCAD-IEEE ACM International Conference on Computer-Aided Design. 345 E 47TH ST, NEW YORK, NY 10017 USA: IEEE, 2014, pp. 175–182.
- J. Maldonado-Correa, S. Martín-Martínez, E. Artigao, and E. Gómez-Lázaro, “Using SCADA data for wind turbine condition monitoring: A systematic literature review,” Energies (Basel), vol. 13, no. 12, 2020. [CrossRef]
- K. V Limaye, V. K. Rao, K. Limaye V, and V. K. Rao, “Methodology for Battery Capacity Sizing of Battery Electric Vehicles,” in 2019 IEEE TRANSPORTATION ELECTRIFICATION CONFERENCE (ITEC-INDIA), 345 E 47TH ST, NEW YORK, NY 10017 USA: Institute of Electrical and Electronics Engineers Inc., 2019. [CrossRef]
- I. Miri, A. Fotouhi, and N. Ewin, “Electric vehicle energy consumption modelling and estimation—A case study,” Int J Energy Res, pp. 1–20, 2020. [CrossRef]
- I. Kocaarslan, M. A. Zehir, E. Uzun, E. C. Uzun, M. E. Korkmaz, and Y. Cakiroglu, “High-Fidelity Electric Vehicle Energy Consumption Modelling and Investigation of Factors in Driving on Energy Consumption,” in Proceedings - 2022 IEEE 4th Global Power, Energy and Communication Conference, GPECOM 2022, Institute of Electrical and Electronics Engineers Inc., 2022, pp. 227–231. [CrossRef]
- J. Wang, I. Besselink, and H. Nijmeijer, “Electric vehicle energy consumption modelling and prediction based on road information,” World Electric Vehicle Journal, vol. 7, no. 3, pp. 447–458, Sep. 2015. [CrossRef]
- X. Wu, D. Freese, A. Cabrera, and W. A. Kitch, “Electric vehicles’ energy consumption measurement and estimation,” Transp Res D Transp Environ, vol. 34, pp. 52–67, Jan. 2015. [CrossRef]
- F. Janković, L. Šćekić, and S. Mujović, “Matlab/Simulink Based Energy Consumption Prediction of Electric Vehicles,” in 2021 21st International Symposium on Power Electronics (Ee), IEEE, Dec. 2021, pp. 1–5. [CrossRef]
- J. Guo, Y. Jiang, Y. Yu, and W. Liu, “A novel energy consumption prediction model with combination of road information and driving style of BEVs,” Sustainable Energy Technologies and Assessments, vol. 42, Dec. 2020. [CrossRef]
- J. Wang, I. Besselink, and H. Nijmeijer, “Battery electric vehicle energy consumption modelling for range estimation,” Int. J. Electric and Hybrid Vehicles, vol. 9, no. 2, pp. 79–102, 2017. [CrossRef]
- B. Luin, S. Petelin, and F. Al-Mansour, “Microsimulation of electric vehicle energy consumption,” Energy, vol. 174, pp. 24–32, May 2019. [CrossRef]
- J. Asamer, A. Graser, B. Heilmann, and M. Ruthmair, “Sensitivity analysis for energy demand estimation of electric vehicles,” Transp Res D Transp Environ, vol. 46, pp. 182–199, Jul. 2016. [CrossRef]
- M. Alhanouti and F. Gauterin, “A Generic Model for Accurate Energy Estimation of Electric Vehicles,” Energies (Basel), vol. 17, no. 2, Jan. 2024. [CrossRef]
- Z. Zhang, Y. Zou, T. Zhou, X. Zhang, and Z. Xu, “Energy consumption prediction of electric vehicles based on digital twin technology,” World Electric Vehicle Journal, vol. 12, no. 4, Dec. 2021. [CrossRef]
- Y. Xie et al., “Microsimulation of electric vehicle energy consumption and driving range,” Appl Energy, vol. 267, Jun. 2020. [CrossRef]
- S. M. Miraftabzadeh, M. Longo, and F. Foiadelli, “Estimation model of total energy consumptions of electrical vehicles under different driving conditions,” Energies (Basel), vol. 14, no. 4, Feb. 2021. [CrossRef]
- X. Qi and Y. Zhang, “Data-driven Macroscopic Energy Consumption Estimation for Electric Vehicles with Different Information Availability,” in 2016 International Conference on Computational Science and Computational Intelligence, IEEE Computer Society, Conference Publishing Services, 2016, pp. 1214–1219. [CrossRef]
- X. Qi, G. Wu, K. Boriboonsomsin, and M. J. Barth, “Data-driven decomposition analysis and estimation of link-level electric vehicle energy consumption under real-world traffic conditions,” Transp Res D Transp Environ, vol. 64, pp. 36–52, Oct. 2018. [CrossRef]
- F. Jimenez, J. C. Amarillo, J. E. Naranjo, F. Serradilla, and A. Diaz, “Energy Consumption Estimation in Electric Vehicles Considering Driving Style,” in IEEE 18th International Conference on Intelligent Transportation Systems, 2015, pp. 101–106. [CrossRef]
- P. Petersen, T. Rudolf, and E. Sax, “A Data-driven Energy Estimation based on the Mixture of Experts Method for Battery Electric Vehicles,” in International Conference on Vehicle Technology and Intelligent Transport Systems, VEHITS - Proceedings, Science and Technology Publications, Lda, 2022, pp. 384–390. [CrossRef]
- F. Foiadelli, M. Longo, and S. Miraftabzadeh, “Energy Consumption Prediction of Electric Vehicles Based on Big Data Approach,” in 2018 IEEE International Conference on Environment and Electrical Engineering and 2018 IEEE Industrial and Commercial Power Systems Europe (EEEIC / I&CPS Europe), IEEE, 2018, pp. 1–6. [CrossRef]
- I. Ullah, K. Liu, T. Yamamoto, R. E. Al Mamlook, and A. Jamal, “A comparative performance of machine learning algorithm to predict electric vehicles energy consumption: A path towards sustainability,” Energy and Environment, vol. 33, no. 8, pp. 1583–1612, Dec. 2022. [CrossRef]
- M. Mądziel, “Energy Modeling for Electric Vehicles Based on Real Driving Cycles: An Artificial Intelligence Approach for Microscale Analyses,” Energies (Basel), vol. 17, no. 5, Mar. 2024. [CrossRef]
- A. Maity and S. Sarkar, “Data-Driven Probabilistic Energy Consumption Estimation for Battery Electric Vehicles with Model Uncertainty,” Jul. 2023, [Online]. Available: http://arxiv.org/abs/2307.00469.
- Q. Zhu, Y. Huang, C. F. Lee, P. Liu, J. Zhang, and T. Wik, “Predicting Electric Vehicle Energy Consumption from Field Data Using Machine Learning,” IEEE Transactions on Transportation Electrification, 2024. [CrossRef]
- A. Cabani, P. Zhang, R. Khemmar, and J. Xu, “Enhancement of energy consumption estimation for electric vehicles by using machine learning,” IAES International Journal of Artificial Intelligence (IJ-AI, vol. 10, no. 1, pp. 215–223, 2021. [CrossRef]
- I. Ullah, K. Liu, T. Yamamoto, M. Zahid, and A. Jamal, “Electric vehicle energy consumption prediction using stacked generalization: an ensemble learning approach,” Int J Green Energy, vol. 18, no. 9, pp. 896–909, 2021. [CrossRef]
- S. Pokharel, P. Sah, and D. Ganta, “Improved prediction of total energy consumption and feature analysis in electric vehicles using machine learning and shapley additive explanations method,” World Electric Vehicle Journal, vol. 12, no. 3, Sep. 2021. [CrossRef]
- A. Fukushima, T. Yano, S. Imahara, H. Aisu, Y. Shimokawa, and Y. Shibata, “Prediction of energy consumption for new electric vehicle models by machine learning,” IET Intelligent Transport Systems, vol. 12, no. 9, pp. 1174–1180, Nov. 2018. [CrossRef]
- C. De Cauwer, J. Van Mierlo, and T. Coosemans, “Energy consumption prediction for electric vehicles based on real-world data,” Energies (Basel), vol. 8, no. 8, pp. 8573–8593, Aug. 2015. [CrossRef]
- C. De Cauwer, W. Verbeke, T. Coosemans, S. Faid, and J. Van Mierlo, “A data-driven method for energy consumption prediction and energy-efficient routing of electric vehicles in real-world conditions,” Energies (Basel), vol. 10, no. 5, 2017. [CrossRef]
- Z. Qi, J. Yang, R. Jia, and F. Wang, “Investigating real-world energy consumption of electric vehicles: A case study of Shanghai,” in Procedia Computer Science, Elsevier B.V., 2018, pp. 367–376. [CrossRef]
- Z. Feng, J. Zhang, H. Jiang, X. Yao, Y. Qian, and H. Zhang, “Energy consumption prediction strategy for electric vehicle based on LSTM-transformer framework,” Energy, vol. 302, Sep. 2024. [CrossRef]
- S. Grubwinkler and M. Lienkamp, “Energy prediction for EVs using support vector regression methods,” Advances in Intelligent Systems and Computing, vol. 323, pp. 769–780, 2015. [CrossRef]
- J. Zhang, Z. Wang, P. Liu, and Z. Zhang, “Energy consumption analysis and prediction of electric vehicles based on real-world driving data,” Appl Energy, vol. 275, Oct. 2020. [CrossRef]
- Q. Liu, F. Gao, J. Zhao, and W. Zhou, “Prediction of Electric Vehicle Energy Consumption in an Intelligent and Connected Environment,” Promet - Traffic and Transportation, vol. 35, no. 5, pp. 662–680, 2023. [CrossRef]
- Z. Wu, X. Chen, and Y. Jiang, “Prediction of Electric Vehicle Energy Consumption by Combining Real Vehicle Data and Machine Learning Methods,” Medicon Engineering Themes, vol. 4, no. 3, Feb. 2023. [CrossRef]
- B. P. Adedeji, “Electric vehicles survey and a multifunctional artificial neural network for predicting energy consumption in all-electric vehicles,” Results in Engineering, vol. 19, Sep. 2023. [CrossRef]
- L. Petkevicius, S. Saltenis, A. Civilis, and K. Torp, “Probabilistic Deep Learning for Electric-Vehicle Energy-Use Prediction,” in ACM International Conference Proceeding Series, Association for Computing Machinery, Aug. 2021, pp. 85–95. [CrossRef]
- S. Modi and J. Bhattacharya, “A system for electric vehicle’s energy-aware routing in a transportation network through real-time prediction of energy consumption,” Complex and Intelligent Systems, vol. 8, no. 6, pp. 4727–4751, Dec. 2022. [CrossRef]
- S. Modi, J. Bhattacharya, and P. Basak, “Convolutional neural network–bagged decision tree: a hybrid approach to reduce electric vehicle’s driver’s range anxiety by estimating energy consumption in real-time,” Soft comput, vol. 25, no. 3, pp. 2399–2416, Feb. 2021. [CrossRef]
- R. Zhang and E. Yao, “Electric vehicles’ energy consumption estimation with real driving condition data,” Transp Res D Transp Environ, vol. 41, pp. 177–187, Dec. 2015. [CrossRef]
- H. Mediouni, A. Ezzouhri, Z. Charouh, K. El Harouri, S. El Hani, and M. Ghogho, “Energy Consumption Prediction and Analysis for Electric Vehicles: A Hybrid Approach,” Energies (Basel), vol. 15, no. 17, Sep. 2022. [CrossRef]
- J. Wang, K. Liu, and T. Yamamoto, “Improving electricity consumption estimation for electric vehicles based on sparse GPS observations,” Energies (Basel), vol. 10, no. 1, 2017. [CrossRef]
- H. Shen et al., “Electric Vehicle Energy Consumption Estimation with Consideration of Longitudinal Slip Ratio and Machine-Learning-Based Powertrain Efficiency,” in IFAC-PapersOnLine, Elsevier B.V., 2022, pp. 158–163. [CrossRef]
- C. Liu, “Energy Consumption Prediction and Optimization of Electric Vehicles Based on RLS and Improved SOA,” IEEE Access, vol. 12, pp. 38180–38191, 2024. [CrossRef]
- M. A. Ganaie, M. Hu, A. K. Malik, M. Tanveer, and P. N. Suganthan, “Ensemble deep learning: A review,” Oct. 01, 2022, Elsevier Ltd. [CrossRef]
- E. Abbasi, M. E. Shiri, and M. Ghatee, “A regularized root-quartic mixture of experts for complex classification problems,” Knowl Based Syst, vol. 110, pp. 98–109, Oct. 2016. [CrossRef]
- S. Yang, J. Wu, Y. Du, Y. He, and X. Chen, “Ensemble Learning for Short-Term Traffic Prediction Based on Gradient Boosting Machine,” J Sens, vol. 2017, 2017. [CrossRef]
- F. Tao, H. Zhang, A. Liu, and A. Y. C. Nee, “Digital Twin in Industry: State-of-the-Art,” IEEE Trans Industr Inform, vol. 15, no. 4, pp. 2405–2415, Apr. 2019. [CrossRef]
- C. Ley, R. K. Martin, A. Pareek, A. Groll, R. Seil, and T. Tischer, “Machine learning and conventional statistics: making sense of the differences,” Mar. 01, 2022, Springer Science and Business Media Deutschland GmbH. [CrossRef]
- C. De Cauwer, W. Verbeke, J. Van Mierlo, and T. Coosemans, “A Model for Range Estimation and Energy-Efficient Routing of Electric Vehicles in Real-World Conditions,” IEEE Transactions on Intelligent Transportation Systems, vol. 21, no. 7, pp. 2787–2800, Jul. 2020. [CrossRef]
- F. Pollák et al., “Promotion of electric mobility in the European Union—overview of project PROMETEUS from the perspective of cohesion through synergistic cooperation on the example of the catching-up region,” Sustainability (Switzerland), vol. 13, no. 3, pp. 1–26, Feb. 2021. [CrossRef]
- R. Basso, B. Kulcsár, B. Egardt, P. Lindroth, and I. Sanchez-Diaz, “Energy consumption estimation integrated into the Electric Vehicle Routing Problem,” Transp Res D Transp Environ, vol. 69, pp. 141–167, Apr. 2019. [CrossRef]
- K. Kruppok, R. Kriesten, and E. Sax, “Calculation of route-dependent energysaving potentials to optimize EV’s range,” 2018, pp. 1349–1363. [CrossRef]
- X. Yuan, C. Zhang, G. Hong, X. Huang, and L. Li, “Method for evaluating the real-world driving energy consumptions of electric vehicles,” Energy, vol. 141, pp. 1955–1968, Dec. 2017. [CrossRef]
- J. Severino et al., “Real-Time Highly Resolved Spatial-Temporal Vehicle Energy Consumption Estimation Using Machine Learning and Probe Data,” 2022.
- K. Unni and S. Thale, “Energy Consumption Analysis for the Prediction of Battery Residual Energy in Electric Vehicles,” Engineering, Technology and Applied Science Research, vol. 13, no. 3, pp. 11011–11019, Jun. 2023. [CrossRef]
- A. Díaz, F. Serradilla, E. Naranjo, J. Anaya, and F. Jiménez, “Modeling the Driving Behavior of Electric Vehicles Using Smartphones and Neural Networks,” IEEE Intelligent Transportation Systems Magazine, vol. 6, no. 3, pp. 44–53, 2014. [CrossRef]
- R. Ristiana, A. S. Rohman, C. Machbub, A. Purwadi, and E. Rijanto, “A new approach of EV modeling and its control applications to reduce energy consumption,” IEEE Access, vol. 7, pp. 141209–141225, 2019. [CrossRef]
- S. Lai, W. Zhang, and H. Liu, “A Preference-aware Meta-optimization Framework for Personalized Vehicle Energy Consumption Estimation,” in Proceedings of the ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, Association for Computing Machinery, Aug. 2023, pp. 4346–4356. [CrossRef]
Figure 1.
Global stock of electric vehicles in selected regions, 2010-2023 [12].
Figure 1.
Global stock of electric vehicles in selected regions, 2010-2023 [12].

Figure 2.
Schematic of BEV’s drivetrain.
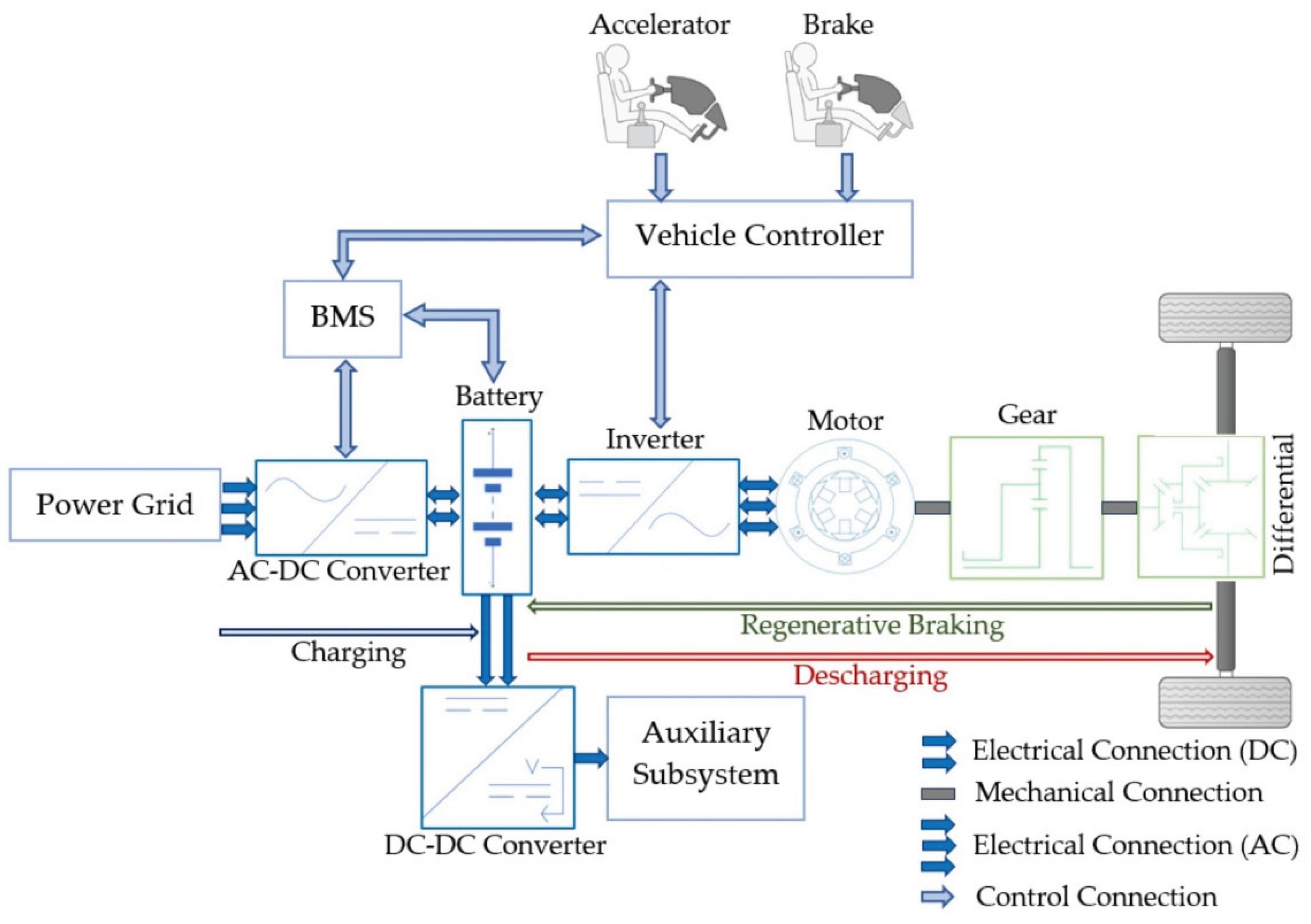
Figure 3.
PRISMA flow diagram for study selection.
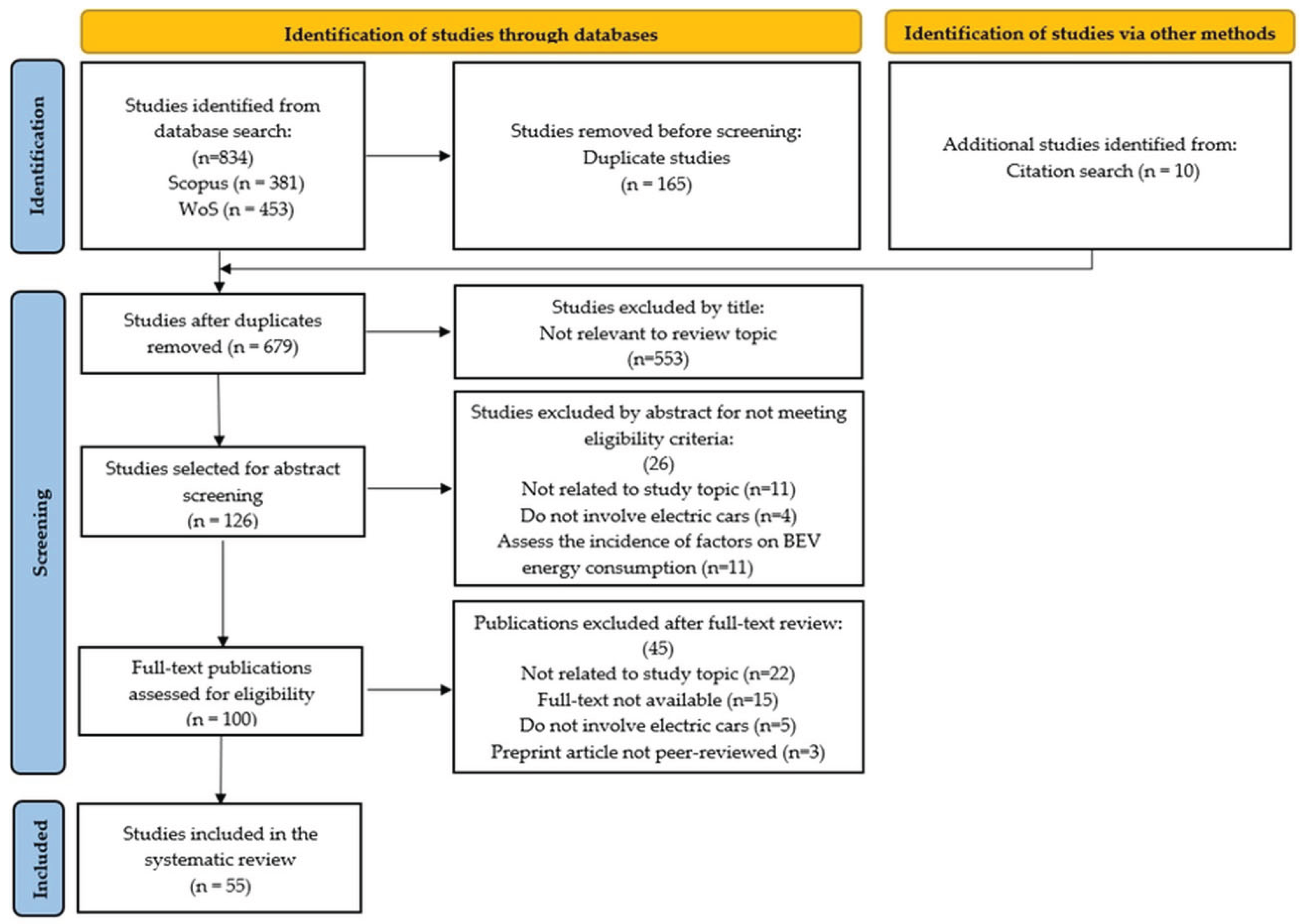
Figure 4.
Number of articles by year of publication.
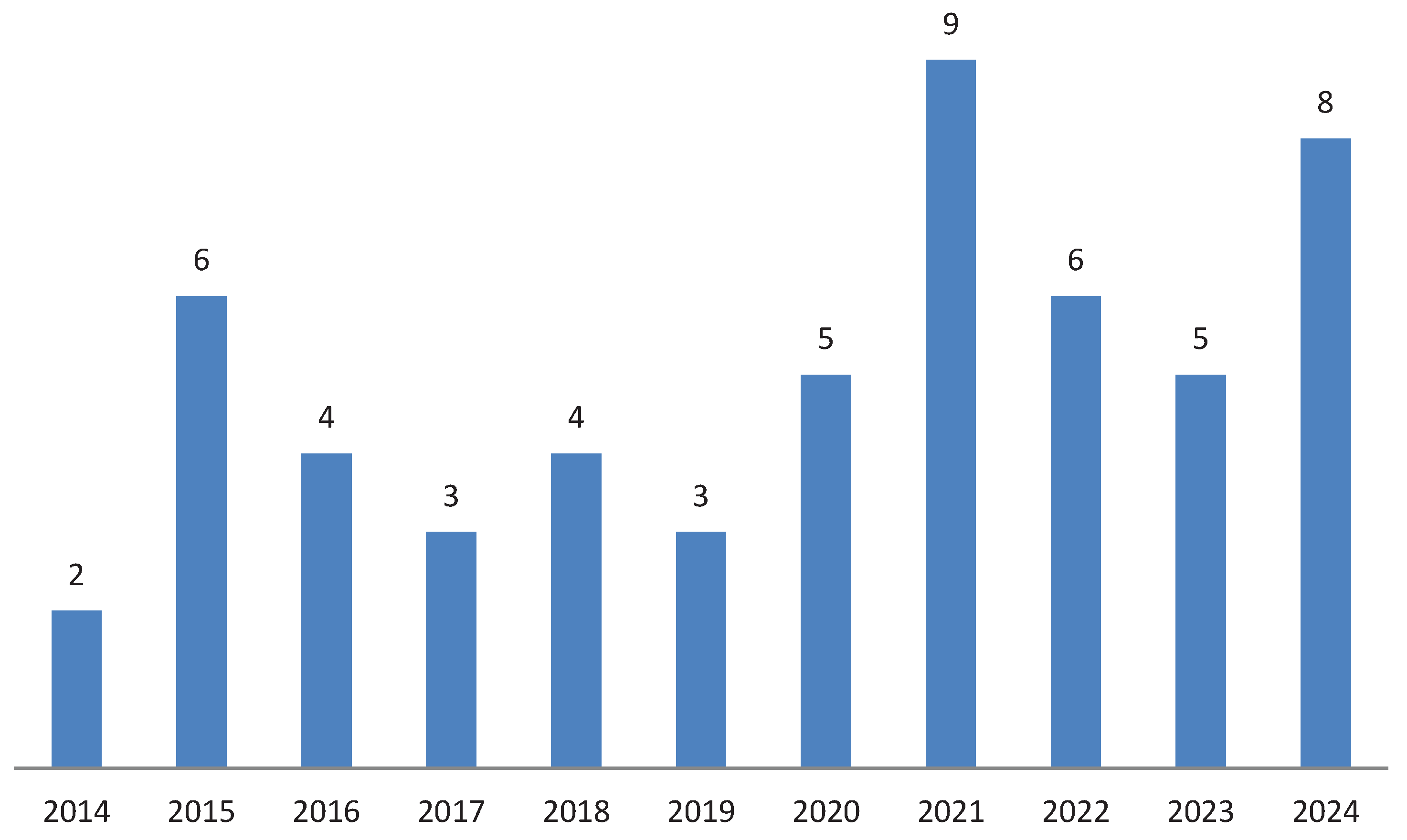
Figure 5.
Distribution of the number of articles on methodologies for predicting BEV energy consumption.
Figure 5.
Distribution of the number of articles on methodologies for predicting BEV energy consumption.
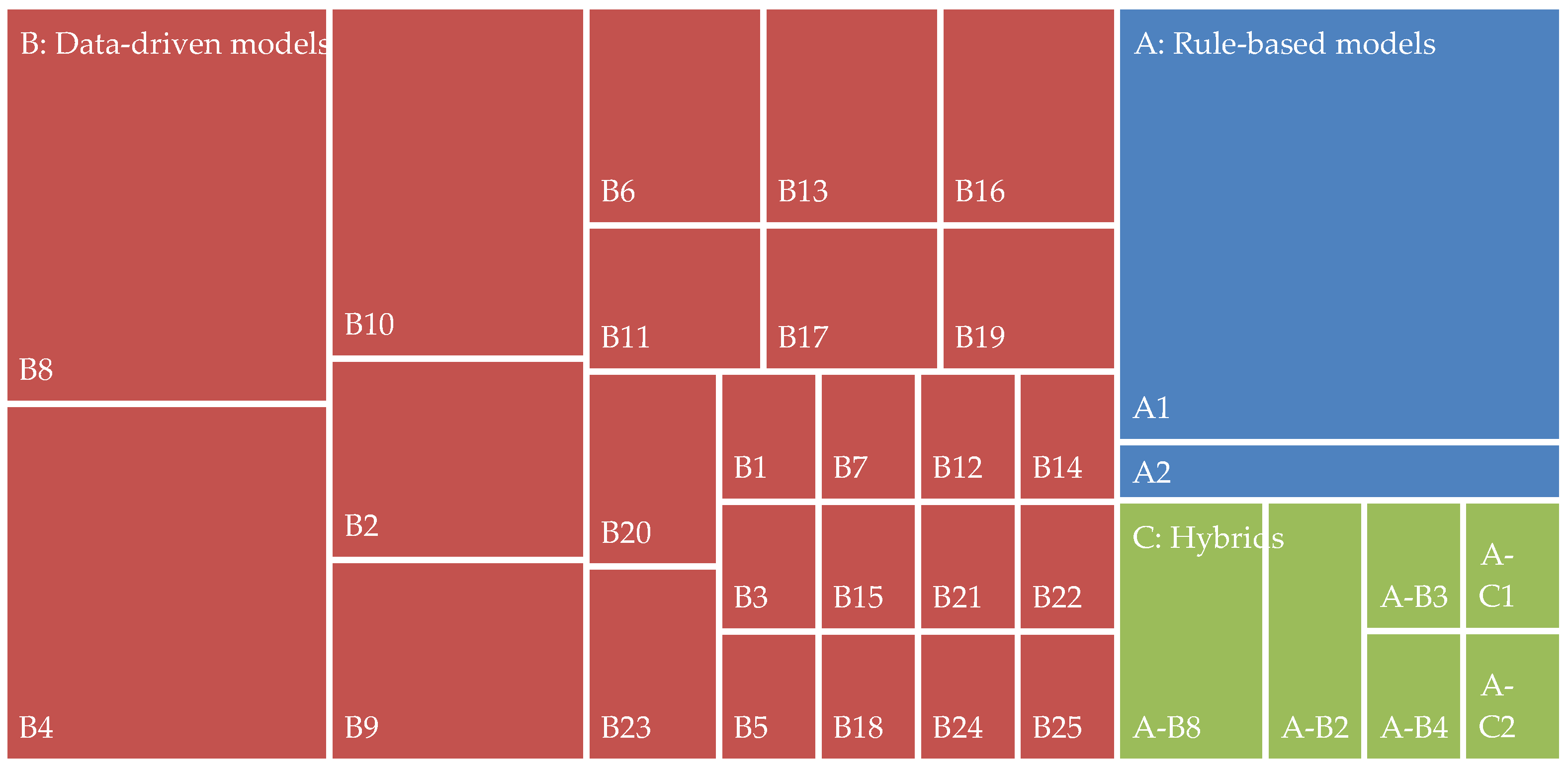
Figure 6.
Classification of methodologies for predicting BEV energy consumption.
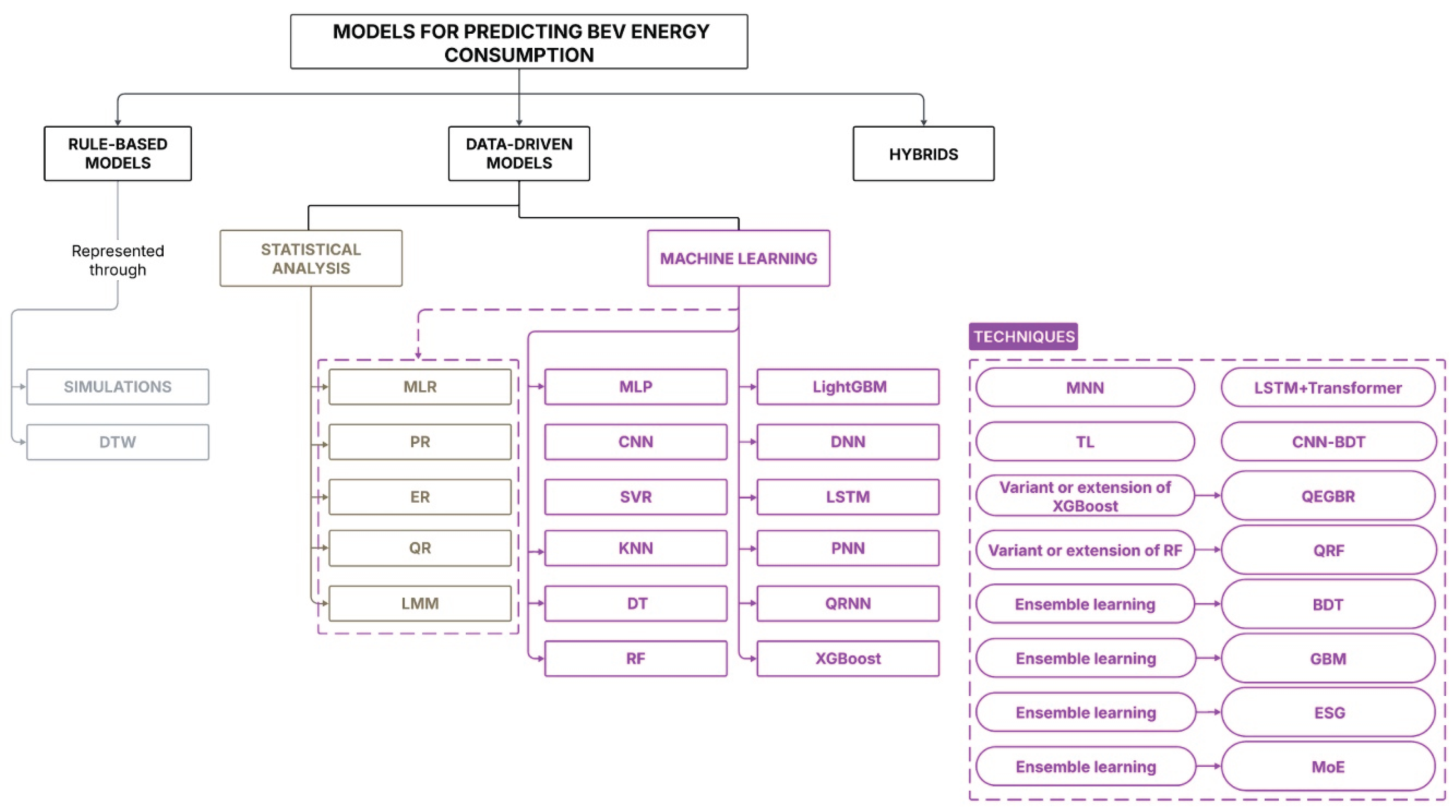
Figure 7.
Distribution of the number of articles according to (a) computational tools and (b) evaluation metrics.
Figure 7.
Distribution of the number of articles according to (a) computational tools and (b) evaluation metrics.
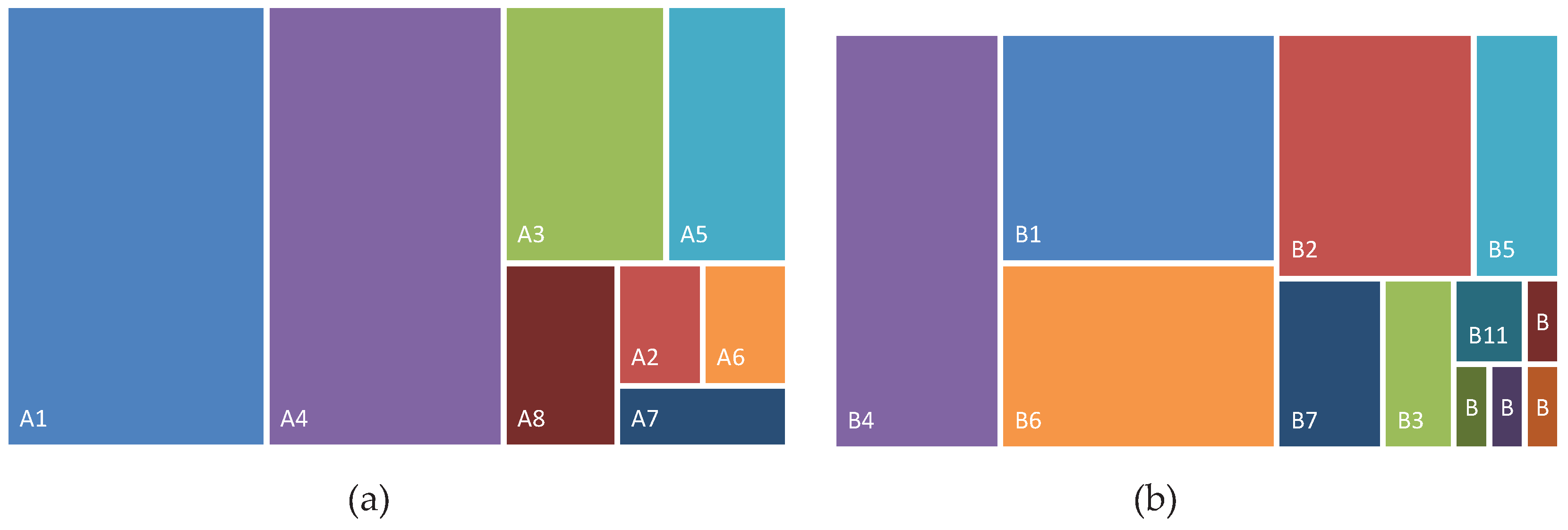
Figure 8.
Distribution of the number of articles according to the topology of variables used to predict BEV energy consumption.
Figure 8.
Distribution of the number of articles according to the topology of variables used to predict BEV energy consumption.
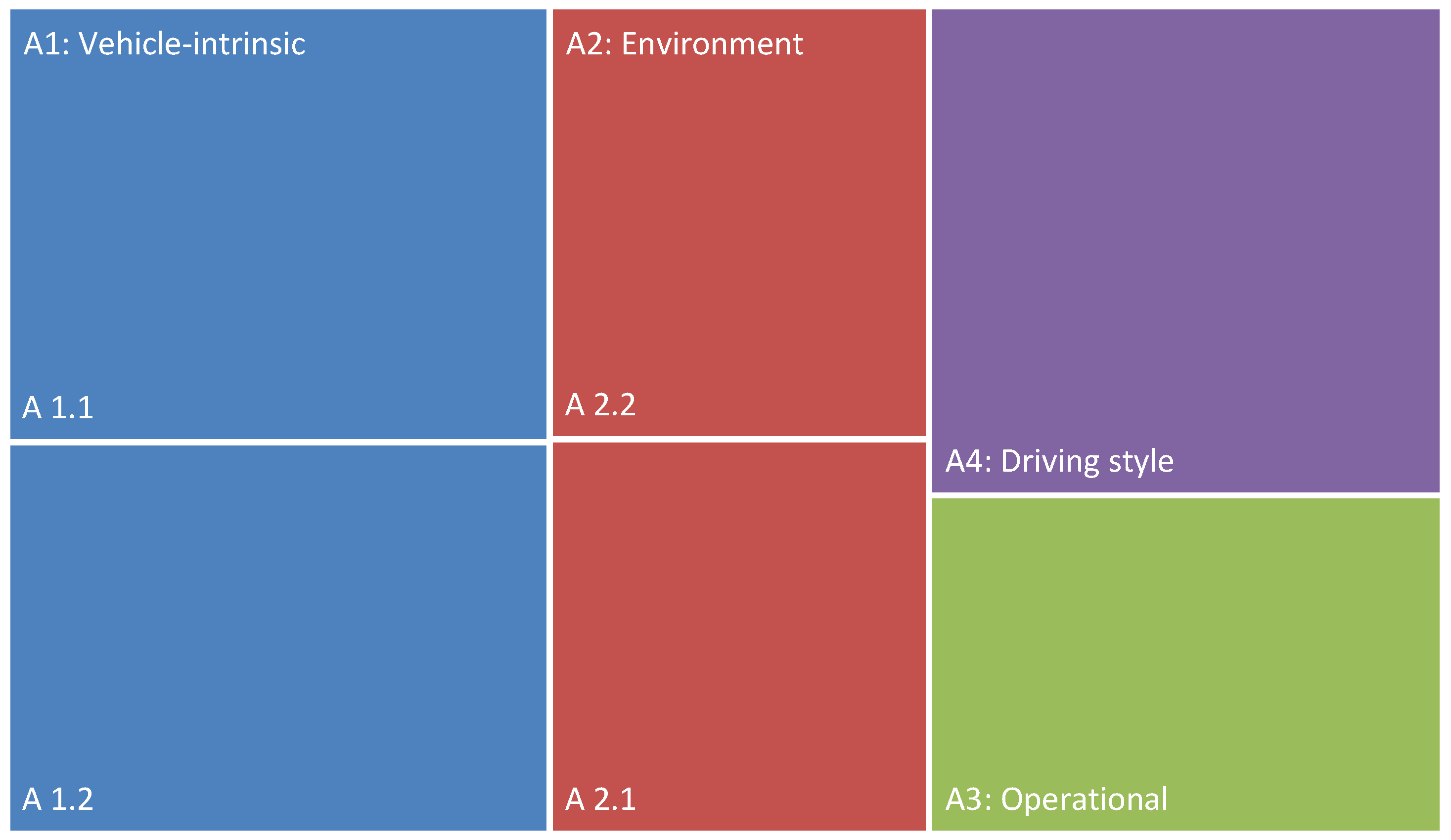
Figure 9.
Distribution of the number of articles according to (a) variable sampling frequency and (b) data analysis period.
Figure 9.
Distribution of the number of articles according to (a) variable sampling frequency and (b) data analysis period.
Figure 10.
Distribution of the number of articles according to the modelling scale.
Figure 11.
Distribution of the number of articles according to the data source of the models.

Table 1.
Semantic search structure.
| Category of search terms | Description |
|---|---|
| 1 | (“electric vehicl*” OR “electric car*”)1 |
| 2 | (“energy consumption” OR “power consumption”) |
| 3 | (“prediction” OR “estimation” OR “forecasting”) |
1 Asterisks are used to cover all possibilities.
Table 2.
Search script.
| TITLE-ABS-KEY ("electric vehicl*" OR "electric car*" AND "energy consumption" OR "power consumption" AND "prediction" OR "estimation" OR "forecasting") AND LANGUAGE (english) AND SUBJAREA (comp) OR SUBJAREA (ener) OR SUBJAREA (engi) OR SUBJAREA (envi) OR SUBJAREA (math) OR SUBJAREA (phys) |
Table 3.
List and metrics of publication outlets.
| Journal | Number of articles | JCR | SJR | h5 |
Value | ||
|---|---|---|---|---|---|---|---|
| Quartile | IF | Quartile | IF | ||||
| Applied Energy | 3 | Q1 | 10.1 | Q1 | 2.82 | 189 | 4037.32 |
| Transportation Research Part D: Transport and Environment | 5 | Q1 | 7.4 | Q1 | 2.33 | 99 | 1706.96 |
| Energy | 2 | Q1 | 9.0 | Q1 | 2.11 | 165 | 1566.68 |
| Sustainable Cities and Society | 1 | Q1 | 10.5 | Q1 | 2.55 | 147 | 983.98 |
| Energies | 9 | Q3 | 3.0 | Q1 | 0.65 | 137 | 534.30 |
| Applied Soft Computing | 1 | Q1 | 7.2 | Q1 | 1.84 | 133 | 440.50 |
| IEEE Transactions on Transportation Electrification | 1 | Q1 | 7.2 | Q1 | 2.77 | 75 | 373.95 |
| Sustainable Energy Technologies and Assessments | 1 | Q1 | 7.1 | Q1 | 1.57 | 90 | 250.81 |
| IEEE Access | 1 | Q2 | 3.4 | Q1 | 0.96 | 266 | 217.06 |
| ISA Transactions | 1 | Q1 | 6.3 | Q1 | 1.57 | 83 | 205.24 |
| Complex & Intelligent Systems | 1 | Q2 | 5.0 | Q1 | 1.32 | 66 | 108.90 |
| International Journal of Energy Research | 1 | Q1 | 4.3 | Q1 | 0.83 | 89 | 79.41 |
| Results in Engineering | 1 | Q1 | 6.0 | Q1 | 0.79 | 54 | 63.99 |
| Soft Computing | 1 | Q2 | 3.1 | Q2 | 0.81 | 90 | 56.50 |
| International Journal of Sustainable Transportation | 1 | Q2 | 3.1 | Q1 | 1.22 | 47 | 44.44 |
| International journal of green energy | 2 | Q3 | 3.1 | Q2 | 0.72 | 39 | 43.52 |
| World Electric Vehicle Journal | 2 | Q2 | 2.6 | Q2 | 0.57 | 40 | 29.64 |
| Energy & Environment | 1 | Q2 | 4.0 | Q2 | 0.64 | 40 | 25.60 |
| IET Intelligent Transport Systems | 1 | Q2 | 2.3 | Q1 | 0.78 | 44 | 19.73 |
| Transportation Research Record | 1 | Q3 | 1.6 | Q2 | 0.54 | 56 | 12.10 |
| Promet - Traffic & Transportation | 1 | Q4 | 0.8 | Q3 | 0.3 | 17 | 1.02 |
| International Journal of Electric and Hybrid Vehicles | 1 | Q4 | 0.4 | Q3 | 0.26 | 10 | 0.26 |
| IAES International Journal of Artificial Intelligence (IJ-AI) | 1 | - | - | Q3 | 0.37 | 29 | 0.00 |
| Procedia Computer Science | 1 | - | - | - | 0.51 | 113 | 0.00 |
| IFAC-PapersOnLine | 1 | - | - | - | 0.37 | 56 | 0.00 |
| 2014 IEEE/ACM International Conference on Computer-Aided Design, ICCAD | 1 | - | - | - | - | 41 | 0.00 |
| Advances in Intelligent Systems and Computing | 1 | - | - | - | - | 40 | 0.00 |
| Proceedings - 2016 International Conference on Computational Science and Computational Intelligence, CSCI 2016 | 1 | - | - | - | - | 22 | 0.00 |
| Proceedings - 2022 IEEE 4th Global Power, Energy and Communication Conference, GPECOM 2022 | 1 | - | - | - | - | 18 | 0.00 |
| IEEE Conference on Intelligent Transportation Systems, Proceedings, ITSC | 2 | - | - | - | - | 16 | 0.00 |
| International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS) | 1 | - | - | - | - | 16 | 0.00 |
| 2019 IEEE Transportation Electrification Conference, ITEC-India 2019 | 1 | - | - | - | - | 13 | 0.00 |
| 2021 21st International Symposium on Power Electronics, Ee 2021 | 1 | - | - | - | - | 10 | 0.00 |
| Proceedings - 2018 IEEE International Conference on Environment and Electrical Engineering and 2018 IEEE Industrial and Commercial Power Systems Europe, EEEIC / I and CPS Europe | 1 | - | - | - | - | - | 0.00 |
| SSTD '21: Proceedings of the 17th International Symposium on Spatial and Temporal Databases | 1 | - | - | - | - | - | 0.00 |
| Medicon Engineering Themes | 1 | - | - | - | - | - | 0.00 |
| 28th International Electric Vehicle Symposium and Exhibition 2015, EVS 2015 | 1 | - | - | - | - | - | 0.00 |
Table 4.
Publishers with the highest number of publications.
| Publisher | Percentage of articles |
|---|---|
| Elsevier | 30.9 |
| MDPI | 21.8 |
| IEEE | 18.2 |
| Taylor & Francis | 5.5 |
| Springer | 5.5 |
| Sage | 3.6 |
| Otras | 14.5 |
Table 5.
Articles on methodologies for predicting BEV energy consumption.
| Category 1. Methodologies for predicting BEV energy consumption | Number of articles | |||
|---|---|---|---|---|
| A: Rule-based models | A1 | Simulación | [25,32,34,36,81,82,83,84,85,86,87,88,89,90,91] | 15 |
| A2 | Digital Twin (DT) | [92,93] | 2 | |
| B: Data-driven models | B1 | Convolutional Neural Networks (CNN) | [33] | 1 |
| B2 | Polynomial Regression (PR) | [78,94,95,96] | 4 | |
| B3 | Exponential Regression (ER) | [78] | 1 | |
| B4 | Multilayer Perceptron (MLP) | [13,95,96,97,98,99,100,101,102] | 9 | |
| B5 | Quantile Regression Neural Networks (QRNN) | [103] | 1 | |
| B6 | k-Nearest Neighbours (KNN) | [39,104,105] | 3 | |
| B7 | Mixture of Experts (MoE) | [98] | 1 | |
| B8 | Multiple Linear Regression (MLR) | [39,96,100,101,106,107,108,109,110,111] | 10 | |
| B9 | Support Vector Regression (SVR) | [13,39,106,112] | 4 | |
| B10 | Extreme Gradient Boosting (XGBoost) | [13,39,100,106,113,114,115] | 7 | |
| B11 | Decision Tree (DT) | [99,105] | 2 | |
| B12 | Ensemble Stacked Generalisation (ESG) | [105] | 1 | |
| B13 | Random Forest (RF) | [13,101,105] | 3 | |
| B14 | Transfer Learning (TL) | [107] | 1 | |
| B15 | Multifunctional Neural Networks (MNN) | [116] | 1 | |
| B16 | Light Gradient Boosting Machine (LightGBM) | [39,100,114] | 3 | |
| B17 | Deep Neural Networks (DNN) | [39,117] | 2 | |
| B18 | Quantile Regression (QR) | [103] | 1 | |
| B19 | Long Short-Term Memory Networks (LSTM) | [111,117] | 2 | |
| B20 | CNN – Bagged Decision Tree (BDT) | [118,119] | 2 | |
| B21 | Quantile Extreme Gradient Boosted Regression (QEGBR) | [103] | 1 | |
| B22 | Quantile Regression Forests (QRF) | [103] | 1 | |
| B23 | Gradient Boosting Machines (GBM) | [101,114] | 2 | |
| B24 | LSTM + Transformer | [111] | 1 | |
| B25 | Probabilistic Neural Networks (PNN) | [102] | 1 | |
| C: Hybrids | A-B2 | [79,120] | 2 | |
| A-B3 | [121] | 1 | ||
| A-B8 | [44,122] | 2 | ||
| A-C1 | Linear Mixed Models (LMM) | [122] | 1 | |
| A-B4 | [123] | 1 | ||
| A-C2 | MLR (Fitting with the Recursive Least Squares – RLS – algorithm) + MLP | [124] | 1 | |
Table 6.
Articles on computational tools and evaluation metrics used to predict BEV energy consumption.
Table 6.
Articles on computational tools and evaluation metrics used to predict BEV energy consumption.
| Categories 2 and 3. Computational tools and evaluation metrics used for predicting BEV energy consumption | Number of articles | |||
|---|---|---|---|---|
| A: Computational tools | A1 | Matlab | [25,34,81,82,83,84,86,88,119,121,124] | 11 |
| A2 | FASTSim | [33] | 1 | |
| A3 | SPSS | [41,78,110,120] | 4 | |
| A4 | Python | [39,94,99,101,102,105,106,112,117,119] | 10 | |
| A5 | SUMO | [93,104,114] | 3 | |
| A6 | Cruise | [92] | 1 | |
| A7 | GT-Suite | [93] | 1 | |
| A8 | R | [44,108] | 2 | |
| B: Evaluation metrics | B1 | RMSE (Root Mean Square Error) | [13,33,39,98,100,102,103,104,105,106,109,111,113,114,115,116,117,118,119,121,123] | 21 |
| B2 | MAE (Mean Absolute Error) | [33,39,85,93,100,103,105,106,109,111,115,116,117,118,119,123] | 16 | |
| B3 | r (Pearson Correlation Coefficient) | [25,33,91,119] | 4 | |
| B4 | MAPE (Mean Absolute Percentage Error) | [13,25,34,36,78,79,82,84,87,88,89,90,102,105,111,112,113,114,115,117,118,120,124] | 23 | |
| B5 | Relative error | [32,41,92,93,97,107,108] | 7 | |
| B6 | R² (Coefficient of Determination) | [13,25,39,41,96,99,100,101,105,106,108,109,110,115,120,121,122] | 17 | |
| B7 | MSE (Mean Squared Error) | [39,101,105,116,117,122] | 6 | |
| B8 | Variable correlation matrix | [105] | 1 | |
| B9 | MASE (Mean Absolute Scaled Error) | [44] | 1 | |
| B10 | AIC (Akaike Information Criterion) | [122] | 1 | |
| B11 | SMAPE (Symmetric Mean Absolute Percentage Error) | [95,96] | 2 | |
| B12 | EVS (Explained Variance Score) | [117] | 1 | |
Table 7.
Articles on the topology of variables used to predict BEV energy consumption.
Table 8.
Breakdown of variables used to predict BEV energy consumption according to their topology.
| A1 Vehicle-intrinsic | A2 Environment | A3 Operational | A4 Driving style | ||
|---|---|---|---|---|---|
| A1.1 Related to BEV dynamics | A1.2 Related to BEV components | A2.1 Ambient conditions | A2.2 Road characteristics | ||
| Rolling resistance coefficient Aerodynamic drag coefficient Speed Acceleration Frontal área Vehicle mass Dynamic radius Longitudinal slip ratio Wheel angular speed |
Battery capacity Electric motor efficiency Transmission efficiency Inverter efficiency SoC Range Regenerative braking factor Regeneration power HVAC system power Battery current, voltage, resistance, and power Electric motor voltage and current Accelerator pedal opening percentage Battery temperatura Cabin temperatura Auxiliary loads power: infotainment RPM Recharging time Gear ratio Mass factor Battery specific heat capacity Battery mass Battery emissivity |
Temperature Wind speed Wind direction Precipitation Humidity Air density Visibility |
Road gradient Elevation Road length Road curvature Road night-time lighting Number of route turns Pavement type (asphalt, concrete, dirt, etc.) |
Traffic index Travelled distance (odometer) Driving time (peak/off-peak hours, day or night) Travel time Position (geographical coordinates) Speed limit Traffic signalisation Number of stops Day of the week Road type (urban, highway, primary, residential, or secondary) |
Speed Acceleration Traction torque Braking torque PKE NKE |
Table 9.
Sampling frequency and analysis period of variables used to predict BEV energy consumption.
Table 9.
Sampling frequency and analysis period of variables used to predict BEV energy consumption.
| Categories 2 and 3. Sampling frequency and analysis period of variables used for predicting BEV energy consumption | Number of articles | |||
|---|---|---|---|---|
| A: Sampling frequency | A1 | < 1 s | [33,97,115,118,119] | 5 |
| A2 | 1 s | [13,25,32,34,36,41,44,78,79,81,82,83,84,85,86,90,91,92,93,95,96,101,102,103,108,109,112,113,114,120,121,123,124] | 33 | |
| A3 | > 1 s y ≤ 1 min | [100,105,111,122] | 4 | |
| A4 | > 1 min | [94,99,104] | 3 | |
| B: Analysis period | B1 | < 1 año | [13,25,36,39,41,44,84,85,91,95,96,101,110,118,120,123,124] | 17 |
| B2 | 1 año | [94,100,105,111,113,115,117,122] | 8 | |
| B3 | > 1 año | [88,103,108,109] | 4 | |
Table 10.
Modelling scale of the articles in predicting BEV energy consumption.
| Modelling scales used for predicting BEV energy consumption | Number of articles | |||
|---|---|---|---|---|
| A: Modelling scale | A1 | Microscopic | [25,32,33,34,44,78,79,81,82,83,84,85,86,88,89,91,92,93,97,101,111,118,119,120,121,123,124] | 27 |
| A2 | Mesoscopic | [36,39,41,95,96,98,102,107,114] | 9 | |
| A3 | Macroscopic | [13,87,90,94,99,100,103,104,105,106,108,109,110,112,113,115,116,117,122] | 19 | |
Table 11.
Data source of the articles in predicting BEV energy consumption.
| Data source of the models used for predicting BEV energy consumption | Number of articles | |||
|---|---|---|---|---|
| A: Data source | A1 | Real-world data | [13,25,34,36,39,41,44,79,84,85,87,88,90,91,92,94,95,96,97,98,99,100,101,102,103,104,105,106,107,108,109,110,111,112,113,114,115,116,117,118,120,121,122,123,124] | 45 |
| A2 | Simulated data | [32,33,36,78,81,82,83,86,89,91,93,96,101,119,121] | 15 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



