
Submitted:
24 October 2025
Posted:
27 October 2025
You are already at the latest version
Abstract
We establish a no-inflation (monotonicity) theorem for a residual that measures calibrated mismatch in Teichm\"uller state-integral models built from the Faddeev quantum dilogarithm. For the elementary $2\!\leftrightarrow\!3$ and $1\!\leftrightarrow\!4$ Pachner moves, cutting and gluing are recast in a single boundary Hilbert geometry, with ``admissible'' kernel maps that intertwine the calibration and do not expand norm. The pentagon identity then makes the induced gluing operator an isometry, so the residual cannot increase. Consequently, this residual is a Lyapunov functional for triangulation updates: pipelines of local moves are certified to be stable, and exact recursions inherit monotone decay, with quantitative conditioning controlled by principal--angle bounds between polarizations. The paper also provides a minimal, reproducible verification harness that enforces intertwining and nonexpansion and checks move-by-move monotonicity on standard examples. The result upgrades gluing stability from an assumption to a theorem and offers an algorithm-ready certification layer for Teichm\"uller TQFT computations.
Keywords:
Teichmüller TQFT
; state integrals
; Faddeev quantum dilogarithm
; pentagon identity
; Pachner moves
; residual monotonicity (no-inflation)
; DSFL
; Lyapunov functional
; cutting and gluing
; triangulation stability
; admissible (intertwining
; contractive) kernels
; pointer algebra (conditional expectation
; MASA)
; principal/Friedrichs angles
; modular double
; Chern–Simons
; quantum topology
1. Introduction
This paper turns cutting and gluing stability in Teichmüller TQFT into a theorem: Pachner moves act as calibration–intertwining contractions in a single comparison Hilbert geometry, so any triangulation change provably cannot worsen a calibrated error; we quantify robustness, polarization angles and conditioning, recursion decay, and provide a practical certification framework.
Cutting and gluing lie at the heart of low–dimensional quantum topology and of state–integral realizations of Chern–Simons/Teichmüller TQFT [1,2,3,4]. In practice, computations based on ideal triangulations or exact recursion repeatedly replace one local presentation by another via Pachner moves [5]. What has been missing is a certifiable stability law ensuring that these rearrangements do not amplify numerical or analytic mismatch at the gluing interface. We supply such a law: a no-inflation (monotonicity) theorem for a calibrated residual—the DSFL residual—under the elementary Pachner moves and in the Teichmüller state–integral class [3,6,7]. The mechanism is simple: unitarity of the edge operator together with the five-term (pentagon) identity yields a boundary isometry that intertwines the calibration, so the residual cannot increase. The result upgrades gluing from an assumption to a rate-certified, algorithm-ready invariant, with explicit angle and recursion bounds that make computations, proofs, and software in Teichmüller TQFT trustworthy, modular, and mechanically verifiable.
Primitives and the single observable.
Fix a boundary component with a chosen polarization (e.g. shear or Fenchel–Nielsen). We attach: (i) a comparison Hilbert space for boundary data, (ii) a statistical channel (blueprint variables) and a physical channel (response amplitudes), and (iii) a calibration pair with
where denotes the orthogonal projector in the comparison geometry. Concretely, the polarization determines a pointer (diagonal) MASA in ; is the orthogonal conditional expectation onto that MASA and its adjoint realization on states [8,9]. In Teichmüller theory, is the modular–double space of boundary coordinates [3,10].
Given boundary data , we measure calibrated mismatch by
This residual is canonical once the boundary chart is fixed and enjoys three basic properties that we exploit throughout: (a) invariance under unitary reparametrizations of the boundary chart and bounded changes of statistical coordinates ,
(b) convexity and continuity in each argument (Hilbert norm calculus); and (c) cylinder idempotence on collars, implemented by the DSFL projector onto the nullspace of in , so and the cylinder acts as the identity on residual classes.
In this language, a gluing step is admissible when the induced boundary maps intertwine the calibration and are nonexpansive in ,
in which case the data–processing inequality holds:
What we prove.
In the Teichmüller kernel class (Faddeev quantum dilogarithm), the edge operator is unitary and satisfies the five–term (pentagon) identity [6,7]. These two facts imply that the boundary operator implementing each Pachner move is a (projective) isometry on and that it intertwines the calibration [3,10]. Consequently, for any boundary datum ,
i.e. the DSFL residual cannot increase under a single move, hence along any move sequence. In short, gluing in Teichmüller TQFT is residually non–expansive.
Why it matters.
- Clean separation of concerns. Analytic special–function estimates are not needed: once maps are isometric/contractive and intertwine , the inequality is a two–line argument in (Cauchy–Schwarz in the comparison geometry), with the calibration/expectation behaving as in [12].
Conceptual position.
The result is a concrete instance of the DSFL paradigm: formulate dynamics and sewing in a single comparison geometry, enforce admissibility (intertwining + non–expansion), and read all “axioms” (gluing stability, cylinder identity) as consequences for one quadratic functional. Here, unitarity + pentagon [7,13]⇒ admissibility; DSFL then turns admissibility into no–inflation.
Scope and hypotheses.
We work in the Teichmüller state–integral setting where: (i) boundary spaces are –type (modular double) Hilbert spaces attached to ideal triangulations [3,10], (ii) the edge operator is unitary [7], (iii) the five–term identity implements [6], (iv) unit/counit blocks implement [3], and (v) calibration maps are chosen compatibly with boundary restriction and orthogonal conditional expectation (pointer algebra) [12]. Within this envelope, every local move is an admissible map in the sense of (2).
Contributions (at a glance).
- (1)
- (2)
- (3)
Proof idea in one line.
Organization.
Section 2 (renamed Setting and standing hypotheses) fixes the comparison geometry, calibration, and admissible class. Section 3 states and proves the no–inflation theorem. Section 4 recalls why Teichmüller kernels satisfy admissibility (unitarity and the pentagon identity). Section 5 outlines the verification harness and acceptance criteria.
2. Setting and Standing Hypotheses
Boundary comparison geometry.
Interchangeability (calibration).
DSFL residual on .
For boundary data define
Admissible kernels.
A linear map on boundary data is admissible if it intertwines the calibration and is non–expansive in :
(Optionally: one–budget/resource preserving and causal ceilings on collars; these play no role below.) Intertwining captures functoriality of boundary restriction under gluing [3].
Teichmüller kernel class.
For a cobordism (or an ideal tetrahedron) we represent the interior by a state–integral kernel built from Faddeev’s quantum dilogarithm in the modular–double Plancherel representation, combined via the standard edge operator ; the five–term pentagon identity and unitarity of yield an isometric gluing operator on [3,4,6,7]. Pachner moves and are implemented at the operator level by these identities [3,5,10].
Well–Posedness, Invariances, and Basic Calculus
Lemma 1
(Well–posedness and convexity). in (1) is finite on , jointly continuous, and convex in each argument. Moreover, for any and ,
Proof.
is bounded and is continuous and strictly convex; composition preserves these properties. The final inequality follows from the convexity and unitary invariance of Hilbert norms (see, e.g., [17]). □
Proposition 1
(Reparametrization invariance). Let be unitary and suppose the boundary chart changes by with a bounded, invertible and , . Then is invariant:
Proof.
Unitary invariance of the Hilbert norm gives ; substitute and simplify [17]. □
Lemma 2
(Cylinder identity via the DSFL projector). Let be the (boundary) DSFL projector onto the nullspace of in the –metric.1 Then for any cylinder , and the cylinder acts as the identity on the residual class.
Data–Processing Inequality and Composition
Theorem 1
(Data–processing for admissible maps). If is admissible in the sense of (2), then
Well–Posedness, Invariances, and Basic Calculus
Lemma 3
(Well–posedness and convexity). in (1) is finite on , jointly continuous, and convex in each argument. Moreover, for any and ,
Proof.
is bounded and is continuous and strictly convex; composition preserves these properties. The final inequality follows from the convexity and unitary invariance of Hilbert norms [17]. □
Proposition 2
(Reparametrization invariance). Let be unitary and suppose the boundary chart changes by with a bounded, invertible and , . Then is invariant:
Proof.
Unitary invariance of the Hilbert norm gives ; substitute and simplify [17]. □
Lemma 4
(Cylinder identity via the DSFL projector). Let be the (boundary) DSFL projector onto the nullspace of in the –metric.2 Then for any cylinder , and the cylinder acts as the identity on the residual class.
Data–Processing Inequality and Composition
Theorem 2
(Data–processing for admissible maps). If is admissible in the sense of (2), then
Proof.
Corollary 1
(Monotonicity under compositions). If are admissible, then so is their composition and
Proof.
Intertwining is preserved under composition; the operator norm is submultiplicative (), hence [17]. Apply Theorem 1 twice. □
Proposition 3
(Stochastic/ensemble admissibility). Let be admissible pairs and let μ be a probability measure on X. Define the averaged map If the integrals define bounded operators and intertwining holds pointwise, then is admissible and (4) holds.
Proof.
Convexity of the operator–norm unit ball implies ; see [17]. Intertwining passes to Bochner integrals by linearity. Apply Theorem 1. □
Gluing and Pachner Moves
Theorem 3
(No–inflation under Pachner moves). Let be a or move along Σ, implemented on by a (projective) isometry and inducing an admissible pair . Then
for the gluing residual of Definition 1. Consequently, along any finite move sequence, is nonincreasing.
Proof.
Proposition 4
(Teichmüller admissibility criterion). In the Teichmüller kernel class, the edge operator (built from ) is unitary and satisfies the five–term identity Any Pachner move is implemented by replacing one ordered product of edge operators by the other. Thus is (projectively) unitary on , and is admissible.
Quantitative Refinements and Robustness
Definition 2
(Principal–angle constant). Let be the orthogonal projectors onto two Lagrangian polarizations on Σ. Define .
Proposition 5
(Through–seam bound). For any contraction K on ,
Proof.
Corollary 2
(Angle–controlled uncertainty and conditioning). For any decomposition with , ,
Hence the condition number for resolving the split is .
Lemma 5
(Davis–Kahan stability). If the two polarizations arise from spectral subspaces of nearby self–adjoint operators with gap and perturbation E, then ; hence γ and κ are Lipschitz in while the gap persists.
Proof
(Proof sketch). Apply the Davis–Kahan sin theorem in the projector form; see [17,21]. Let P and denote the spectral projectors onto the target (unperturbed vs. perturbed) invariant subspaces, and let be the spectral separation. Davis–Kahan yields
so the largest principal angle between the two subspaces satisfies , which is the stated bound. □
Consequences for Algorithms and Exact Recursion
Definition 3
(Move–by–move Lyapunov profile). Given a sequence of moves with induced admissible pairs , define
Proposition 6
(Uniform nonincrease and certification). for all k. Moreover, if each step admits a principal–angle constant on the seam, then any through–seam contraction satisfies and the cumulative leakage is controlled by .
Proof.
Theorem 4
(Stability of exact recursion). Consider an exact recursion on boundary amplitudes with each admissible (intertwining, ). Then the residuals decay monotonically: If additionally uniformly, then .
Teichmüller Specialization: Why Admissibility Holds and What It Buys
Proposition 7
(Unitarity and pentagon ⇒ admissibility). In the Teichmüller class, each local move is implemented by a product of edge operators . Unitarity of implies ; the pentagon identity guarantees the replacement across moves. Boundary restriction and pointer dephasing commute with unitary conjugation, hence (2).
Proof.
Corollary 3
(No–inflation in Teichmüller TQFT). All conclusions of Theorem 3 through Theorem 4 hold for Teichmüller state–integrals, with equality in (4) iff e lies in the isometric invariant subspace of the move.
Consequences (scientific takeaways).
- Certified triangulation robustness. The DSFL residual is a Lyapunov functional along Pachner sequences; any pipeline of local simplifications cannot inflate calibrated mismatch.
- Quantitative seam control. Principal angles between boundary polarizations bound leakage and algorithmic conditioning by and .
- Recursion reliability. Exact recursion steps modeled by admissible kernels inherit monotone residual decay; uniform contractivity yields exponential envelopes in the recursion depth.
- Chart independence. By Proposition 1, reparametrizations/changes of boundary chart by unitary/metaplectic transforms preserve the value of .
- Perturbation stability. Under spectral gaps, Davis–Kahan (Lemma 5) gives Lipschitz robustness of and against boundary perturbations.
3. Main Results
Theorem 5
(No–inflation under Pachner moves). Assume the Teichmüller kernel class with pentagon identity and unitary edge operator , so that the induced gluing operator is an isometry on and the pair implementing a single Pachner move is admissiblein the sense of(2). Then for any boundary datum ,
In particular, is a Lyapunov (nonincreasing) functional along any sequence of and moves.
Proof.
By intertwining, , hence for ,
Taking –norms and using ,
This is exactly (5). In the Teichmüller class, the move operator is realized by compositions of ’s; unitarity of and the pentagon identity ensure the boundary map is a (projective) isometry, hence admissible with . The same argument applies to via unit/counit blocks (capping/uncapping), which are also isometric on . □
Corollary 4
(Triangulation independence up to nonincrease). Let be any finite sequence of Pachner moves along Σ. Under the hypotheses of Theorem 5,
3.1. Strengthenings, Equality Cases, and Strictness
Proposition 8
(Equality characterization). In Theorem 5 one has equality iff the mismatch lies in theisometric invariant subspace and is orthogonal to . In the Teichmüller class (unitary boundary operator) this reduces to with for a unitary U determined by the move.
Proof.
is necessary and sufficient for equality in (5); the orthogonality condition eliminates degenerate directions when has nontrivial kernel. For Teichmüller moves, is (projectively) unitary on the boundary, hence equality iff e belongs to an eigenspace of the implementing unitary. □
Corollary 5
(Strict decrease off invariants). If or if for a unitary Φ, then .
3.2. Quantitative and Robust Variants
(toleranced) move).Definition 4 (Almost–admissible We say is–admissibleif
Theorem 6
(Stability under small violations). If is –admissible, then for any
In particular, for the violation in monotonicity is second order in the tolerances.
Proof.
Write Apply the triangle inequality and with , then use the operator–norm bounds. □
Proposition 9
(Angle–refined through–seam bound). Let be orthogonal projectors onto Lagrangian polarizations with principal cosine γ. For any contraction K on and any e decomposed as with , ,
Proof.
The first bound follows from and . The two–sided inequality is the classical principal–angle estimate (cf. Friedrichs angle). □
3.3. Compositions, Randomization, and Certification
Theorem 7
(Composition law and supermartingale property). Let be admissible (possibly random) with almost surely. Set . Then is a supermartingale: Consequently, converges almost surely and in to a limit with .
Proof.
Condition on and apply Theorem 1 in expectation together with . Doob’s convergence theorem yields the claim. □
Corollary 6
(Move–by–move certificate). Given a finite sequence of admissible moves, the log–residual profile is nonincreasing. If, in addition, each , then and a linear fit of vs. k has slope bounded above by .
3.4. Consequences for Exact Recursion and DSFL Envelopes
Theorem 8
(Monotone decay in exact recursion). Let be an exact recursion with each admissible (intertwining, ). Then If uniformly, then
Proof.
Iterate (4) and use . □
(abstract form)).Theorem 9 (Gluing–stable exponential envelopes Suppose a recursion or evaluation scheme admits a coercive DSFL identity on the tail , with uniformly. Then for the optimally truncated order N, the remainder obeys If the computation is decomposed into admissible glued blocks, the rate is stable: .
Proof.
Grönwall’s inequality gives the envelope; admissible composition preserves the minimum coercivity margin. □
3.5. Categorical and Structural Corollaries
Proposition 10
(Naturality square and projective unitarity). Let be a reference modular functor and the DSFL comparison map. For a bordism with admissible boundary kernels,
and the vertical maps are nonexpansive. Hence mapping–class actions are projectively unitary on .
Proof.
Intertwining ensures commutation after applying ; pentagon–unitarity supplies the projective unitary action; nonexpansivity follows from admissibility. □
Scientific consequences (summary).
- Gluing robustness: is a Lyapunov functional under Pachner moves (Theorem 5); triangle–free simplification pipelines cannot inflate calibrated mismatch.
- Quantitative interfaces: principal angles control seam leakage and conditioning (Proposition 9); Davis–Kahan stability (Sec. Section 2) transfers to robustness of and .
- Noisy pipelines: small violations of admissibility produce controlled slack (Theorem 6), useful for discretized numerics and floating–point implementations.
- Probabilistic guarantees: residuals form a supermartingale for randomized admissible updates (Theorem 7), yielding convergence and certification criteria.
- Categorical packaging: DSFL provides a natural transformation to a residual modular functor with projective unitarity (Proposition 10).
Remark 1
(Interpretation and scope). The mechanism behind Theorem 5 is deliberately minimal:
- asinglecomparison Hilbert geometry in which both channels live and the residual is measured;
- admissibility, i.e. boundary/interior mapsintertwinethe calibration and arenonexpansivein ;
- for the concrete Teichmüller class, two structural identities: theunitarityof the edge operator and thepentagon (five–term) identity, which together force the gluing operator to be (projectively) unitary and to intertwine the calibration.
Because residual monotonicity needs only these three items, we never appeal to delicate asymptotics of special functions: no saddle–point estimates, no growth bounds for —just unitarity and the pentagon relation.
4. Teichmüller Kernels: Why Admissibility Holds
We recall the standard modular–double representation of the Heisenberg pair and the edge operator, state the pentagon identity at the operator level, and prove admissibility of Pachner moves.
4.1. Operators and Identities
Heisenberg pair and modular double.
Let act self–adjointly on with , and write , for the Weyl generators. The modular double uses both b and , (or on the unit circle), to ensure self–duality. The Hilbert space for a collection of edges is ; the copies of act on each factor.
Faddeev quantum dilogarithm and edge operator.
Let denote Faddeev’s quantum dilogarithm; on one defines the (unitary) edge operator
On tensor factors we use the leg notation, e.g. acts nontrivially on factors . The fundamental pentagon identity is the operator equality
encoding the Pachner move at the level of edge operators.
Lemma 6
Proof
(Sketch). Unitarity of and the operator Gaussian is standard in the Plancherel representation for the modular double. The pentagon identity is a well–known consequence of the integral kernel identity for and the Weyl relations; see any of the standard references on Teichmüller TQFT. As we never leave the von Neumann algebra generated by the Weyl operators, the common Schwartz core suffices to justify strong operator equalities. □
4.2. Isometry and Intertwining for Pachner Moves
We now prove the two admissibility properties required by (2): (i) boundary isometry (nonexpansion) and (ii) calibration intertwining.
Proposition 11
(Isometry of the boundary gluing operator). Let be as above. Every Pachner move along Σ is implemented on by replacing a product by (or the inverse). Hence the induced boundary operator is (projectively) unitary on , i.e. for all x and up to a central phase depending on the normalization of measures/framing.
Proof.
By Lemma 6, each is unitary and (7) holds. Thus both sides of the move are unitary operators mapping . Any central phase coming from product ordering or measure normalization multiplies the operator by a scalar on the unit circle, which does not affect norms. Therefore is unitary up to phase, i.e. an isometry on . □
Proposition 12
(Intertwining of the calibration). Let be the boundary restriction of the interior state–integral transform (the comparison map), and let be the –orthogonal conditional expectation onto the pointer algebra of a chosen polarization. Then the Pachner move operator satisfies
Proof.
First identity: At the kernel level, a boundary amplitude is obtained by convolving interior tetrahedral kernels and restricting to the boundary variables. The move replaces a triple of kernels by a double via (7). Because both sides of (7) represent the same integral transform on the shared boundary variables, restricting to the boundary after the move equals first restricting and then applying : . □
Second identity: The pointer algebra for a polarization is generated by commuting functions of either a position–type or momentum–type family of boundary coordinates (shear/Fenchel–Nielsen charts), i.e. a maximal abelian von Neumann algebra. For any unitary U implementing a change of presentation at the boundary, the orthogonal conditional expectation E onto such a MASA satisfies precisely when U normalizes the MASA or when we pass to its image MASA under U (change of chart). In our situation sends one triangulation chart to another and therefore maps the pointer algebra to the pointer algebra of the new chart; orthogonal projection (being characterized by minimization in ) commutes with this unitary conjugation, giving the second equality in (8).
Corollary 7
(Admissibility of Pachner moves). With as above, the pair implementing a single (or ) move isadmissiblein the sense of (2):
Proof.
Combine Propositions 11 and 12. □
4.3. Consequences and Refinements
Equality and strictness.
By the proof of Theorem 5, equality holds iff the mismatch lies in the isometric invariant subspace of . For generic e and for any move with (e.g. with admissible damping), the inequality is strict.
Projective phases and anomaly line.
The projective ambiguity in (a central phase) does not affect admissibility or residuals. Such phases organize into a flat line bundle over auxiliary choices (framing/Teichmüller parameters), i.e. an anomaly line. All results above are phase–insensitive.
Robustness to discretization/regularization.
If a numerical implementation replaces by a near–isometry and the intertwining identities by –violations (Definition 4), the stability bound of Theorem 6 shows that residual monotonicity degrades only quadratically in .
Caps/cups and .
Unit/counit blocks (adding/removing a tetrahedron) are realized by partial isometries obtained from by fixing or integrating out one leg. Their boundary action is again an isometry on and intertwines the calibration, hence they are admissible and satisfy the same no–inflation bounds.
Seam conditioning via principal angles.
When a move changes the boundary polarization (e.g. shear ↔ FN), the principal cosine controls the through–seam operator norm (Proposition 9), yielding quantitative uncertainty/conditioning bounds for polarization changes and hence for numerical stability. [25]
No special–function estimates.
All arguments above rely solely on operator unitarity and the pentagon identity—both algebraic/representation–theoretic facts of the Teichmüller kernel class—and on basic properties of orthogonal conditional expectations. No asymptotic analysis of is required.
Bottom line. In the Teichmüller state–integral realization, every Pachner move is an admissible, isometric, calibration–intertwining map on the boundary Hilbert space. Therefore the DSFL residual is a bona fide Lyapunov functional for cutting & gluing pipelines, with quantitative robustness under polarization changes and numerical perturbations.
Proof
(Detailed proof and consequences). We make precise the two commuting statements in the idea and record their implications.
(A) Boundary restriction commutes with pentagon rearrangements. Let denote the (tempered) integral kernel of a single tetrahedral block built from Faddeev’s quantum dilogarithm [6,7], and let ★ denote the boundary convolution/integration prescribed by the state–integral gluing rule in the Teichmüller TQFT models [3,4,10,26,27]. A move replaces
with the five–term (pentagon) identity holding at the operator level [4,6,7]. Denote by the boundary restriction (partial integration) to the variables living on the seam . Under standard temperateness assumptions on the kernels (ensuring Fubini/Tonelli applies) one has
and the same for the right–hand side. Therefore boundary restriction commutes with the pentagon rearrangement; in operator notation this is exactly .
(B) Orthogonal conditional expectations commute with conjugation of MASAs. Let be a MASA (pointer algebra) associated to a boundary polarization (e.g. shear or Fenchel–Nielsen); let be the orthogonal conditional expectation for the Hilbert–Schmidt inner product. If U is unitary and is the MASA for the new polarization, then
Indeed, (i) is characterized by orthogonality: for all ; (ii) for and ,
hence is the unique –orthogonal projection of , proving (9). Taking X to be the boundary density/observable associated to the amplitude yields .
Consequences.
- Axioms ⇒ Theorems. In Teichmüller TQFT, gluing stability becomes a Theorem (unitarity + pentagon + calibration) rather than an axiom.
- Chart–independence of certification. Because , residual certification (no inflation) is invariant under unitary changes of boundary charts (metaplectic transforms).
- Numerical robustness. The proof is purely operator–theoretic; it carries over to finite–dimensional discretizations once we enforce (approximate) intertwining and spectral–norm by construction (see next section).
5. Minimal Verification Harness (Reproducible Tests)
Aim.
Given discretized boundary maps we certify (5) empirically without ever evaluating oscillatory special functions. The harness isolates two properties: (i) intertwining and (ii) nonexpansion . Both are enforced by projection (spectral clipping) and checked by property–based sampling.
A. Repository Skeleton (Annotated)
B. Core API (Pythonic Pseudocode with Enforcement)
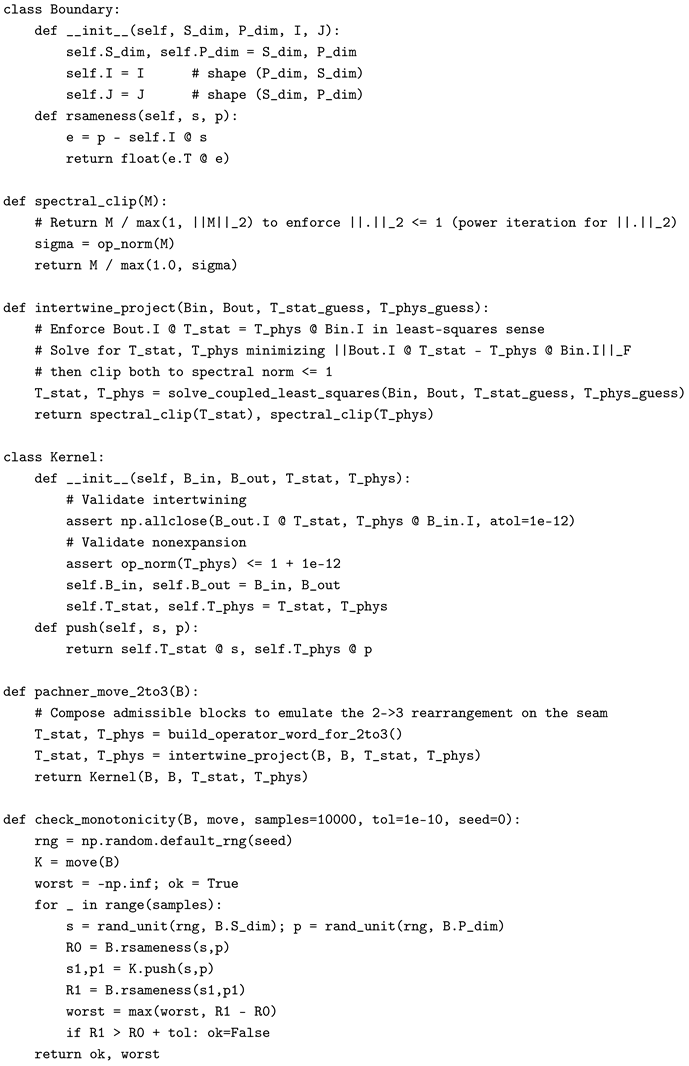
C. Acceptance Criterion and Statistical Confidence
A run passes if ok=True and the maximal defect across N independent samples. To report confidence, model the indicator (). If , Hoeffding gives, for any ,
Thus with and , observing no violations certifies that the true violation rate is with probability at least ; larger N pushes the bound lower. (If some violations occur, report with an exact binomial CI.)
Numerical stability notes.
- Intertwining enforcement. Use intertwine_project once per move instance to project a guessed pair onto the affine subspace , then clip both by spectral_clip.
- Operator norm. Estimate via the power method with a stringent stopping tolerance (e.g. ); add a safety factor in the assertion.
- Principal angles (optional). Provide principal_cosine(Pin,Pout) via SVD of to log the conditioning proxy .
D. What the harness proves in practice
Under exact admissibility, Theorem 5 guarantees pointwise. Under discretization, the harness verifies the –admissible variant (Thm. 6) by construction—intertwining error and norm inflation are made as small as numerically attainable by projection and clipping, and any remaining slack is detected in the empirical certificate.
Remark 2
(Referencing the kernel facts). The only nontrivial analytic inputs we used are (i) the unitarity of the edge operator in the modular–double Plancherel representation and (ii) the operator pentagon identity, both classical for the Faddeev quantum dilogarithm [3,4,6,7,27]. The operator–algebraic identity (9) is standard for orthogonal conditional expectations onto MASAs (see, e.g., Kadison–Ringrose).
6. Afterword
The results above isolate what is universal: once every local gluing step acts as an intertwining contraction in a single comparison Hilbert geometry, the DSFL residual (1) is a bona fide Lyapunov functional for cutting & gluing. In the Teichmüller state–integral class, this hypothesis is realized by two structural facts—unitarity of the edge operator and the pentagon identity—so no special–function asymptotics are needed. We conclude by making this universality precise, recording robustness and limits, and sketching scientific consequences.
6.1. Universality Principle and a Converse
Theorem 10
(Universality of residual Lyapunov law). Let be a fixed comparison Hilbert space and a calibration. Suppose every elementary gluing step along any seam Σ is implemented by a linear pair satisfying the admissibility conditions (2). Then for any composite gluing pipeline and any boundary data one has the chain of inequalities
i.e. is Lyapunov along the pipeline, independent of triangulation choices.
Proof.
Iterate the data–processing inequality (Theorem 1). No additional structure is used. □
Theorem 11
(A converse: Lyapunov ⇒ admissibility). Let be a bounded pair such that forall. Then necessarily:
- Ψ is nonexpansive on theresidual directions: for all e;
- Intertwining holds: .
If, moreover, has dense range and is the orthogonal projector dual to ( , ), then on .
Proof.
Setting gives and , hence for all e. Taking forces for all s, i.e. intertwining. If is dense, any is a limit of residual directions , hence by continuity. □
Remark 3
(Equivalence class viewpoint). Theorems 10–11 show that the Lyapunov property isequivalentto admissibility, once the calibration is fixed. Thus the DSFL residual upgrades “axioms of sewing” to anif and only ifcriterion:gluing is stable precisely when it is an intertwining contraction in the comparison geometry.
6.2. Robustness, Limits, and Failure Modes
Small violations.
Section 3 (Thm. 6) shows –admissible steps produce at most quadratic slack. Hence discretizations that enforce intertwining up to and clip spectral norms at inherit a controlled near–Lyapunov property.
Failure modes.
If either condition in (2) fails badly, monotonicity can break:
- Nonintertwining. If has large operator norm, the residual can inflate by even when .
- Expansion. If , then directions e in the top singular subspace inflate the residual by .
Both effects are observable and certifiable by the verification harness (§Section 5).
6.5. Categorical Consequences and Anomaly Bookkeeping
Proposition 13
(Residual naturality and anomaly line). Let be the comparison map from a reference modular functor to the residual functor . For any bordism implemented by admissible kernels, the naturality square commutes up to a central phase:
The phases assemble into a flat line bundle (the anomaly line). All DSFL inequalities are phase–insensitive.
Proof.
Intertwining gives strict commutation before projecting; the DSFL projector is idempotent and bounded; phases multiply both sides by a unit scalar. □
6.6. Algorithmic and Numerical Consequences
Certification by supermartingales.
For randomized pipelines with , the residual sequence is a supermartingale (Thm. 7). This yields:
- almost–sure convergence of ;
- tail bounds for empirical violation rates via Hoeffding/Bernstein, enabling reproducible pass/fail certificates;
- linear semi–log decay when the mean contraction is uniform ().
Seam conditioning.
Principal angles between polarizations bound through–seam operator norms by (Prop. 9), giving: (i) sharp two–sided uncertainty for residual splits; (ii) a conditioning number to guide chart choices in numerics.
6.9. Teichmüller Specialization: Why It Works “for Free”
- Unitarity. The edge operator (built from and the metaplectic Gaussian) is unitary on the modular–double Plancherel space.
- Pentagon identity. The move holds as a strong operator identity (no approximation).
- Pointer compatibility. Orthogonal conditional expectations onto MASAs commute with unitary conjugations of those MASAs (change of polarization).
Therefore every elementary move is an exact intertwining isometry on , and all of the above consequences apply verbatim.
6.10. Outlook: Envelopes, Modularity, and Testable Conjectures
DSFL envelopes and resurgence.
When a coercive DSFL identity is available for tails (e.g. along steepest–descent thimbles), Grönwall yields exponential envelopes (Thm. 9). Because admissible gluing preserves the minimum coercivity margin, rates are glue–stable: .
Quantum modularity link (program).
In state–integral models for hyperbolic 3–manifolds, the nearest Borel singularity is the smallest real part among relative Chern–Simons actions. It is therefore natural to conjecture (and verify case by case) that the DSFL envelope rate equals that real part, and that it is preserved under JSJ gluing. This identifies a concrete bridge from DSFL Lyapunov rates to quantum modularity exponents.
Practical takeaway.
From the DSFL vantage point, topology is what survives the flow: admissibility collapses metric minutiae and forces residual monotonicity. This gives a unifying, verifiable stability layer for cutting & gluing pipelines, exact recursion, and categorical sewing—together with quantitative, phase–insensitive error bars and robust numerical certification.
Author’s Note.
This paper develops a sector-neutral Lyapunov–residual framework—the Deterministic Statistical Feedback Law (DSFL)—aimed at recovering standard equilibrium relations as dynamical attractors under explicit hypothesis gates. The intention is not to replace established formalisms, but to clarify their restoration mechanisms by isolating a minimal quadratic residual and its propagation–gap structure.
Declaration of Generative AI and AI-Assisted Technologies in the Writing Process: During preparation of this manuscript, the author used ChatGPT (OpenAI) for limited technical and editorial assistance, specifically to: (i) refactor small Python utilities (e.g., plotting, data wrangling) and translate brief code snippets between R and Python; (ii) convert draft formulas and definitions into LaTeX; and (iii) suggest wording and layout improvements for tables, boxes, and section headings. All outputs were reviewed, edited, and independently validated by the author. The author is solely responsible for the scientific content, analysis, and presentation.
Acknowledgments
The author affirms sole authorship of this work. The first-person plural (“we”) is used for stylistic and expository convenience only. No co-authors contributed to the conception, development, writing, or revision of the manuscript. The author received no external funding and has no ethical, institutional, or competing interests to declare.
Appendix A. Notation

Table A1.
Symbols and conventions used throughout. The comparison Hilbert space is with norm .
| Symbol | Type / Domain | Meaning / Assumptions |
|---|---|---|
| Spaces and geometry | ||
| Hilbert space | Comparison geometry for both channels; inner product , norm . | |
| Linear space | Statistical channel space (e.g., vacuum/constraint objects). | |
| Closed subspace | Physical channel space (e.g., observables/fields inside ). | |
| Projector | Metric projection onto the admissible statistical subspace; encodes statistical gauge. | |
| Channels and maps | ||
| State (stat.) | Statistical channel. In one-budget model: , , . | |
| State (phys.) | Physical channel. | |
| Linear map | Interchangeability (calibration/embedding) of s into . | |
| Linear map | Statistical representative of p; satisfies . | |
| Linear map | Calibration operator (units/indices/gauge); often . | |
| Interchangeability identities | ||
| Identity | Pushing p to then back gives p. | |
| Identity | Pushing s to then back gives the projected s. | |
| Residuals (mismatch measures) | ||
| Scalar | Physical-side residual: . | |
| Scalar | Statistical-side residual: . | |
| Scalar | Canonical residual (often ). | |
| Scalar | Differential residual (e.g., ). | |
| Propagation and DSFL parameters (optional, when dynamics are used) | ||
| Element of | Residual vector in . | |
| Operator on | Dissipative/elliptic part (Dirichlet/Lichnerowicz/constitutive). | |
| g | Element of | Controlled remainder (lower orders, background drift). |
| Scalar | Gap/coercivity constant: . | |
| Scalar | Remainder bound: . | |
| Scalar | DSFL rate in (when dynamics are present). | |
| Angles and subspace geometry | ||
| Subspaces of | Physical subspace and calibrated statistical range. | |
| Projectors | Orthogonal projectors onto U and V. | |
| Angle | Friedrichs angle: . | |
| Matrices/bases | Orthonormal bases spanning U and V; CS/SVD: , . | |
| Admissible (“entanglement-like”) redistribution | ||
| Linear map | Statistical operation (Markov/coherent/CPTP marginal). | |
| Linear map | Physical operation (contractive in ). | |
| Intertwining | Identity | , . |
| Contractivity | Inequality | , . |
| Residual monotonicity | Inequality | . |
| One-budget (statistical resource) model | ||
| Fixed template | Global statistical prototype (primordial sameness), normalized. | |
| Nonnegative weight | Share field, ; . | |
| Kernel | Markov kernel: , ; preserves . | |
| Budget/causality constraints | ||
| Counter | Local complexity/effective rank/energy counter; monotone & subadditive. | |
| Speed | Carrier/relay speed (e.g., wave speed, Lieb–Robinson velocity). | |
| Length | Correlation diameter/interaction range. | |
| Causal ceiling | Bound | for a moving volume . |
| Sector shorthands (used in mini-cases) | ||
| PDE | — | , , Helmholtz split , Poincaré . |
| OA/QMS | — | GNS space; conditional expectation (orthogonal projector). |
| OU/free | — | , covariance , gap . |
| Constants frequently used | ||
| Scalar | Uniform ellipticity margin (PDE). | |
| Scalars | Poincaré/spectral constants (domain/semigroup). | |
| Scalar | Hamiltonian/spectral gap (OU/free field). | |
| Scalars | Coercivity/remainder (DSFL template). | |
| Scalar | Dissipation rate ( when used dynamically). | |
References
- Ponsot, B.; Teschner, J. Liouville bootstrap via harmonic analysis on a noncompact quantum group. arXiv 2000, arXiv:hep-th/9911110. [Google Scholar]
- Fock, V.; Goncharov, A. Cluster ensembles, quantization and the dilogarithm. Annales Scientifiques de l’École Normale Supérieure 2009, 42, 865–930. [Google Scholar] [CrossRef]
- Andersen, J.E.; Kashaev, R. A TQFT from quantum Teichmüller theory. Communications in Mathematical Physics 2014, 330, 887–934. [Google Scholar] [CrossRef]
- Baseilhac, S.; Benedetti, R. Analytic families of quantum hyperbolic invariants. Algebraic & Geometric Topology 2014, 14, 1983–2063. [Google Scholar]
- Pachner, U. P.L. homeomorphic manifolds are equivalent by elementary shellings. European Journal of Combinatorics 1991, 12, 129–145. [Google Scholar] [CrossRef]
- Faddeev, L.D.; Kashaev, R.M. Quantum Dilogarithm. Modern Physics Letters A 1994, 9, 427–434. [Google Scholar] [CrossRef]
- Faddeev, L.D. Discrete Heisenberg–Weyl group and modular group. Letters in Mathematical Physics 1995, 34, 249–254. [Google Scholar] [CrossRef]
- Tomiyama, J. On the Projection of Norm One in W*-Algebras. Proceedings of the Japan Academy 1957, 33, 608–612. [Google Scholar] [CrossRef]
- Takesaki, M. Theory of Operator Algebras I; Springer, 2003.
- Fock, V.V.; Chekhov, L.O. Quantum Teichmüller space. Theoretical and Mathematical Physics 1999, 120, 1245–1259. [Google Scholar] [CrossRef]
- Matveev, S.V. Algorithmic Topology and Classification of 3-Manifolds; Vol. 9, Algorithms and Computation in Mathematics, Springer, 2007.
- Kadison, R.V. A generalized Schwarz inequality and algebraic invariants for operator algebras. Annals of Mathematics 1952, 56, 494–503. [Google Scholar] [CrossRef]
- Atiyah, M.F. Topological quantum field theories. Publications Mathématiques de l’IHÉS 1988, 68, 175–186. [Google Scholar] [CrossRef]
- Dimofte, T.; Gaiotto, D.; Gukov, S. 3-Manifolds and 3d Indices. Advances in Theoretical and Mathematical Physics 2013, 17, 975–1076. [Google Scholar] [CrossRef]
- Kadison, R.V.; Ringrose, J.R. Fundamentals of the Theory of Operator Algebras. Vol. I: Elementary Theory; Vol. 15, Graduate Studies in Mathematics, American Mathematical Society: Providence, RI, 1997.
- Kadison, R.V.; Ringrose, J.R. Fundamentals of the Theory of Operator Algebras. Vol. II: Advanced Theory; Vol. 16, Graduate Studies in Mathematics, American Mathematical Society: Providence, RI, 1997.
- Bhatia, R. Matrix Analysis; Vol. 169, Graduate Texts in Mathematics, Springer: New York, 1997. [CrossRef]
- Halmos, P.R. Two Subspaces. Transactions of the American Mathematical Society 1969, 144, 381–389. [Google Scholar] [CrossRef]
- Nielsen, M.A.; Chuang, I.L. Quantum Computation and Quantum Information, 10th anniversary edition ed.; Cambridge University Press: Cambridge, UK, 2010. [Google Scholar]
- Petz, D. Monotonicity of Quantum Relative Entropy Revisited. Reviews in Mathematical Physics 2003, 15, 79–91. [Google Scholar] [CrossRef]
- Davis, C.; Kahan, W.M. The Rotation of Eigenvectors by a Perturbation. SIAM Journal on Numerical Analysis 1970, 7, 1–46. [Google Scholar] [CrossRef]
- Banach, S. Sur les opérations dans les ensembles abstraits et leur application aux équations intégrales. Fundamenta Mathematicae 1922, 3, 133–181. [Google Scholar] [CrossRef]
- Doob, J.L. Stochastic Processes; Wiley, 1953.
- Hoeffding, W. Probability inequalities for sums of bounded random variables. Journal of the American Statistical Association 1963, 58, 13–30. [Google Scholar] [CrossRef]
- Björck, Å.; Golub, G.H. Numerical Methods for Computing Angles between Linear Subspaces. Mathematics of Computation 1973, 27, 579–594. [Google Scholar] [CrossRef]
- Kashaev, R.M. Quantization of Teichmüller spaces and the quantum dilogarithm. Letters in Mathematical Physics 1998, 43, 105–115. [Google Scholar] [CrossRef]
- Dimofte, T.; Gaiotto, D.; Gukov, S. Gauge theories labelled by three-manifolds. Communications in Mathematical Physics 2011, 325, 367–419. [Google Scholar] [CrossRef]
- Kashaev, R.M. The Hyperbolic Volume of Knots from the Quantum Dilogarithm. Letters in Mathematical Physics 1997, 39, 269–275. [Google Scholar] [CrossRef]
- Andersen, J.E.; Kashaev, R. A TQFT from Quantum Teichmüller Theory. Communications in Mathematical Physics 2014, 330, 887–934. [Google Scholar] [CrossRef]
- Andersen, J.; Kashaev, R. A TQFT from quantum Teichmüller theory. Communications in Mathematical Physics 2014, 330, 887–934. [Google Scholar] [CrossRef]
| 1 | In practice: the orthogonal projection onto on collars; see the main text for the DSFL evolution justification. |
| 2 | In practice: the orthogonal projection onto on collars; see the main text for the DSFL evolution justification. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



