Submitted:
29 August 2025
Posted:
02 September 2025
You are already at the latest version
Abstract
Robotic timber construction has advanced significantly in the last decade, considerably impacting production efficiency and sustainability. This paper explores via literature review the state-of-the-art robotization in timber construction by identifying various computational and robotic tools, techniques, and methods that support the design to fabrication process. It identifies through bibliometric analysis and comparative case study evaluations, emerging trends are identified, including the use of advanced artificial intelligence (AI) methods such as digital twins, real-time adaptive workflows, and machine learning-driven fabrication processes. It furthermore reflects on the advantages of robotic production and assembly, and the challenges to adopting these technologies at large scale. It contributes to understanding current level of robotization in timber construction and identifying future steps.
Keywords:
timber construction
; robotization
; discrete and circular design
; sustainability
1. Introduction
The building construction industry is responsible for high
carbon emissions, significant resource waste, and persistently low production
efficiency [1]. With the rise in carbon dioxide
emissions acknowledged as the primary driver of climate change, a shift in the
construction industry to-wards more sustainable practices and the use of
renewable materials is increasingly implemented [2].
Wood, being a widely utilized building material, is not only renewable it also
serves as a natural carbon sink, which implies that it absorbs and stores more
carbon dioxide from the atmosphere than it releases [3].
More recently, artificial intelligence (AI) and robotics
have infiltrated architecture and building construction in various capacities,
from automating routine tasks to executing large-scale operations through
human-machine collaboration, thereby creating new workflows [4]. Various applications show considerable levels
of automation. Automated prefabrication of timber components has demonstrated
substantial advantages that enhance the overall construction process while
significantly improving the efficiency, quality, and sustainability of
construction projects [5,6,7].
By integrating advanced automation into design,
fabrication, and assembly processes, robotic timber construction addresses
critical challenges in material efficiency, labor productivity, and
sustainability [8]. Overall robotics has the
potential to positively influence 46% of the Sustainable Development Goals
(SDG), particularly those related to industry and the environment,
significantly transforming production systems and societal frameworks [9,10].
In recent years, discrete automation using robotics, AI,
and industrial automation systems optimize manufacturing processes that involve
discrete elements [11]. Such scalable approach
to computational design and manufacturing facilitates mass production of
self-similar elements. Main consideration is that robotized vs. conventional
computer-numerically controlled (CNC) approaches are (a) more capable of handling
complex geometries [12] due to their multiple
degrees of freedom, allowing them to reach and manipulate objects in a
three-dimensional space more easily and (b) more flexible in terms of the range
of tasks and materials they can handle compared to CNC machines, which are
usually specialized for specific tasks. Hence multi-robot systems can
simultaneously or in short sequence implement various tasks.
This paper discusses advancements of automated technologies
in the timber construction industry, focusing on the
design-fabrication-assembly methods and addressing their scalability for
industry adoption. Specifically, it explores material handling, joinery, on-site
and off-site assembly, and AI-assisted workflows from design to construction.
2. State-of-the-art
Fueled by the insight that circularity in wood construction
has inherent advantages such as lower lifecycle emissions and energy
consumption compared to non-wood materials1 and concurrent with
advances in computational design and manufacturing, the growing interest in
circular approaches and robotic timber construction has been focus of various
experiments and studies. One prominent example of innovation in this field comes
from the Eidgenössische Technische Hochschule (ETH) Zürich began already in
2008 to develop robotic assembly processes based on a material-efficient
construction typology developed by Zollinger at the beginning of the 20th
century [13]. Later, they experimented with
other typologies implemented with one or more robots (Figure 1) aiming at advancing semi-/automation
in construction.
Against this backdrop, robotic timber construction is
rapidly maturing and nearing technology readiness level for large-scale
implementation [14]. However, despite these
advancements, many structures are still largely built using conventional CNC
machining of components followed by manual assembly, which leads to
labor-intensive fabrication routines and significant waste of resources.
2.1. Automation
Knowing that about 50% of all tasks can be automated, while
45% are Human-Robot Interaction (HRI) supported and 5% remain in human hands2, identifying
what tasks can be fully automated vs. HRI-supported requires examining the
various tasks that robots can perform. Automating existing processes typically
involves a top-down workflow. First, the desired design of the structure or
building is defined based on the specific site, functional, structural
requirements, etc. Following this, specific robotic instructions are developed
(e.g., pick up element, move it to a specified location, position it, fix in
place, and release). These instructions are generally predefined for each
element to avoid real-time calculation during construction and to maintain
maximum control over the processes. Finally, these instructions are executed by
the robot [15]. More recently, feedback loops
replace such linear approaches, with the fabrication procedures and the
materialization constraints being considered from the very beginning of the
process.
While the design is increasingly informed by production and
assembly requirements, both, on-and off-site processes are being advanced with
some degree of HRI support. For instance, HRI-supported assembly has been
developed at Technical University (TU) Delft using Computer Vision (CV) for
object detection and control algorithms (Figure 2) allowing humans and robots to work together
on the implementation of tasks [17].
This HRI-supported approach involves two main aspects, the
design of the parts, i.e. building com-ponents, and the design of the assembly
based on the robotic production and assembly constraints. The robotic assembly
relies on automated and Human-Robot Interaction (HRI) -supported processes that
requires robots to be able to learn and re-plan the collaborative actions
during the collaboration. The AI system of the robot incorporates CV and
real-time planning techniques to account for both low-level skills (physical
interaction and movement primitives) and high-level skills (when and how to
perform certain actions or movements).
When combined with circular approaches additional decrease
in environmental impact is expected. For instance, using CV to identify,
select, and robotically process reclaimed wood into timber components that are
assembled into larger structures contributes to the advancement of sustainable
practices [18].
Depending on the project, a combination of automated and
HRI-supported on- and off-site fabrication processes is implemented.
2.2. Prefabrication
Automated prefabrication of timber elements has been
demonstrated in various research studies and projects in the last decades [19,20], with
the advantages of prefabrication over on-site construction being identified as
increased precision and accuracy as well as improved process efficiency and
resource utilization [21]. Prefabrication
systems draw upon concepts of reconfigurable factories, agile production
networks, and decentralized manufacturing (Figure 3), designed to rapidly adapt to evolving market demands. Furthermore,
studies have shown that prefabrication can reduce greenhouse gas emissions,
energy use, and construction waste, contributing to a lower environmental
footprint [22]. The resulting decrease in the
environmental footprint further underscores the transformative potential of
automated prefabrication in timber construction [23].
While automation has improved throughput and precision, it
has yet to fully leverage the unique affordances of robotics, such as
multi-material assembly and non-planar joining strategies. Moreover, many
robotic prefabrication methods focus on increasing formal complexity, with
fewer addressing material efficiency, multi-material transitions, or
platform-agnostic adaptability.
2.3. On-Site Construction
Automated on-site construction involves to some degree HRI,
to facilitate safe implementation of construction tasks. Due to the
unstructured environment of architectural sites, on-site robotic construction
requires feedback from the physical environment relying on sensors to supply
the robot with real-time data [24]. Despite
on-site construction challenges various studies are devoted to advancing
research in this area. For instance, mobile multi-robot swarms (Figure 4) are explored for completing the
automated on-site assembly of timber structures relying on sensors, and
feedback processes [7,25].
The integration of AI into teleoperated, Virtual Reality
(VR) controlled on-site robotic applications represents a promising avenue for
advancing timber automation in construction. These technologies offer the
potential to enhance precision, adaptability, and efficiency in complex
construction environments. VR interfaces have been employed to enable robotic
control for tasks such as timber frame assembly [26]
and intuitive design to fabrication processes [27].
These applications simulate site operations, allowing for detailed
previsualization, real-time adjustments, and improved coordination between
human operators and robotic systems.
Currently, on-site robotic construction mainly focuses on
additive manufacturing (AM), automated installation systems, and robotic
assembly systems [28]. These approaches
typically address individual construction activities rather than integrated
construction tasks. The question for robotic timber construction remains how to
integrate all tasks and in which way this integration will im-pact discrete architecture.
The combination of on- and off-site construction leverages
the advantages of both by providing flexibility for adaptations required during
the on-site construction process and higher precision and faster off-site
production since environmental variables like weather delays are minimized.
In this context, AI offers numerous opportunities to
enhance efficiency, precision, and sustainability of design to timber
construction processes [29]. For instance,
École Polytechnique Fédérale de Lausanne (EPFL) developed integrated design
tools for timber plate structures (Figure 5).
Compatible timber joints are automatically created by interpreting an assembly
sequence set by the designer and the 3D model generation of Integrally Attached
Timber Plate (IATP) structures [30,31].
Furthermore, for achieving material efficiency, AI
algorithms and digital machining tools are utilized to scan raw logs, convert
them into boards, and optimize their arrangement for cutting and assembling [32]. Demonstrating superior performance in path
optimization, reduced material waste by 17% compared to conventional CNC
machining manufacture in mortise and tenon structures [33].
The continuous workflow ranging from computational design,
to optimization, and robotic fabrication requires developing an understanding
of the discrete architecture approach.
2.4. Discrete Architecture
In discrete architecture, the emphasis is on discrete
elements or modules, i.e. components, that are assembled into larger
structures. The discrete generative design starts with the individual elements
and their relationship to other elements and progressively extending to form
the overall design. For instance, a discretized growth approach employing a
free-form cellular growth algorithm (Figure 6)
utilizes the emerging qualities of growth simulations for a developing feasible
architectural design [34].
By developing componential designs that incorporate
discretized principles from the outset and by using computational design and
fabrication to ensure precision, quality, and resource efficiency, new
approaches in architecture and building construction are in progress of being
established [35]. The challenge remains to
scale up as most structures developed so far remain at the scale of pavilions.
Considering full-scale applications, robotic timber
construction presents many theoretical, practical and methodological
challenges. For instance, it requires advanced computational design tools and
novel constructive systems for automated construction processes, employing
robust robotic fabrication technologies. In order to develop an approach for
addressing these challenges, ETH Zurich started an in-depth investigation into
robotic assembly of complex timber structures [5].
It explored novel aesthetics and fabrication concepts enabled by digital
technologies [36], while others increasingly
incorporated structural performance [37].
Also, investigations into alternative structural systems, such as reciprocal
structures [38] and folded structures [39], all demonstrate the potential that emerges at
the intersection of computational design and robotic construction.
Discrete architectural design involves two main aspects,
the design of the parts and the combinatorial design of the parts. The robotic
production and assembly of the parts is informed by the combinatorial design,
which relies on geometric interlocking, overlapping, intertwining of the parts
to create larger structures [40]. The feedback
loop established between the design directly and toolpath generation and
sequencing are facilitating both prefabricated and on-site assembly workflows.
These can be extended from assembly to include disassembly and reassembly [41,42] to
create components that can be configured and reconfigured in various ways.
Discrete timber architecture contributes to a more
sustainable, efficient, and adaptable construction paradigm by advancing
modularity, scalability, and material efficiency. When combined with a circular
design approach increased reduction of environmental impact is expected [43,44]. Hence
the value of discrete timber construction extends integrating design with
real-time robotic feedback, semantic encoding, and circular lifecycle
strategies thus bridging the gap between computational logic and environmental
ethics in robotic timber construction.
2.5. Circular Timber Architecture
Circular design is gaining momentum in robotic timber
construction as the industry strives to reduce waste, optimize material usage,
and minimize environmental impact. For instance, advanced robotic systems
identify joints, dismantle components, and segregate materials for recycling or
repurposing, ensuring minimal waste [45]. CV
is employed to identify defects in reclaimed wood with the goal to demarcate
and remove them in order to ensure the structural integrity of the to-be-built
structure [18]. The defect recognition using
images of wooden boards relies on a trained model that identified the size of
the board and demarcated the defects (Figure 7).
However, the field still lacks a broader library of techniques and data
frameworks to assess the embodied energy and reuse potential of timber
components. Emerging work by [46] addresses
robotic disassembly and structural reuse, but these remain at early TRL levels.
Integrating real-time scanning, AI-based material classification, and circular
lifecycle planning tools is essential to move beyond proof-of-concept. As a
result, circularity in robotic timber construction remains both a technical and
epistemic challenge—one that requires deeper collaboration between robotics,
architecture, and lifecycle assessment.
3. Robotization of Timber Construction
To systematically map recent research developments and
inform the selection criteria for the comparative analysis of robotic timber
construction, a bibliometric approach was employed.
3.1. Bibliometric Analysis
As shown in Figure 8,
the annual number of relevant publications from Scopus rises from 2014 to 2024
(556 items). The broader field of Timber Architecture fluctuates between 30 and
80 items per year. Robotic Timber Construction shows steadier growth,
increasing from about 10 items in 2014 to about 21 in 2024, with clear step-ups
in 2019 and 2021. This robotics subset totals 166 items, which is about 23% of
the combined corpus. Taken together, the pattern indicates sustained expansion
of robotics in timber construction, with an average growth rate in the range of
7 to 8 percent over the decade.
To identify keyword co-occurrence a network map was
generated using VOSviewer, based on bibliographic data from 132 peer-reviewed
publications (2020–2025) retrieved from the Scopus database (Figure 9).
This was implemented to identify dominant and emerging thematic areas, with
node size corresponding to keyword occurrence frequency, and linkages
indicating keyword co-occurrence strength. Additionally, the color gradient
illustrates temporal shifts in research focus, ranging from established core
themes (e.g., robotic fabrication, architectural design) to emerging interests
(e.g., digital twin, mixed reality, circular economy, human–robot
collaboration).
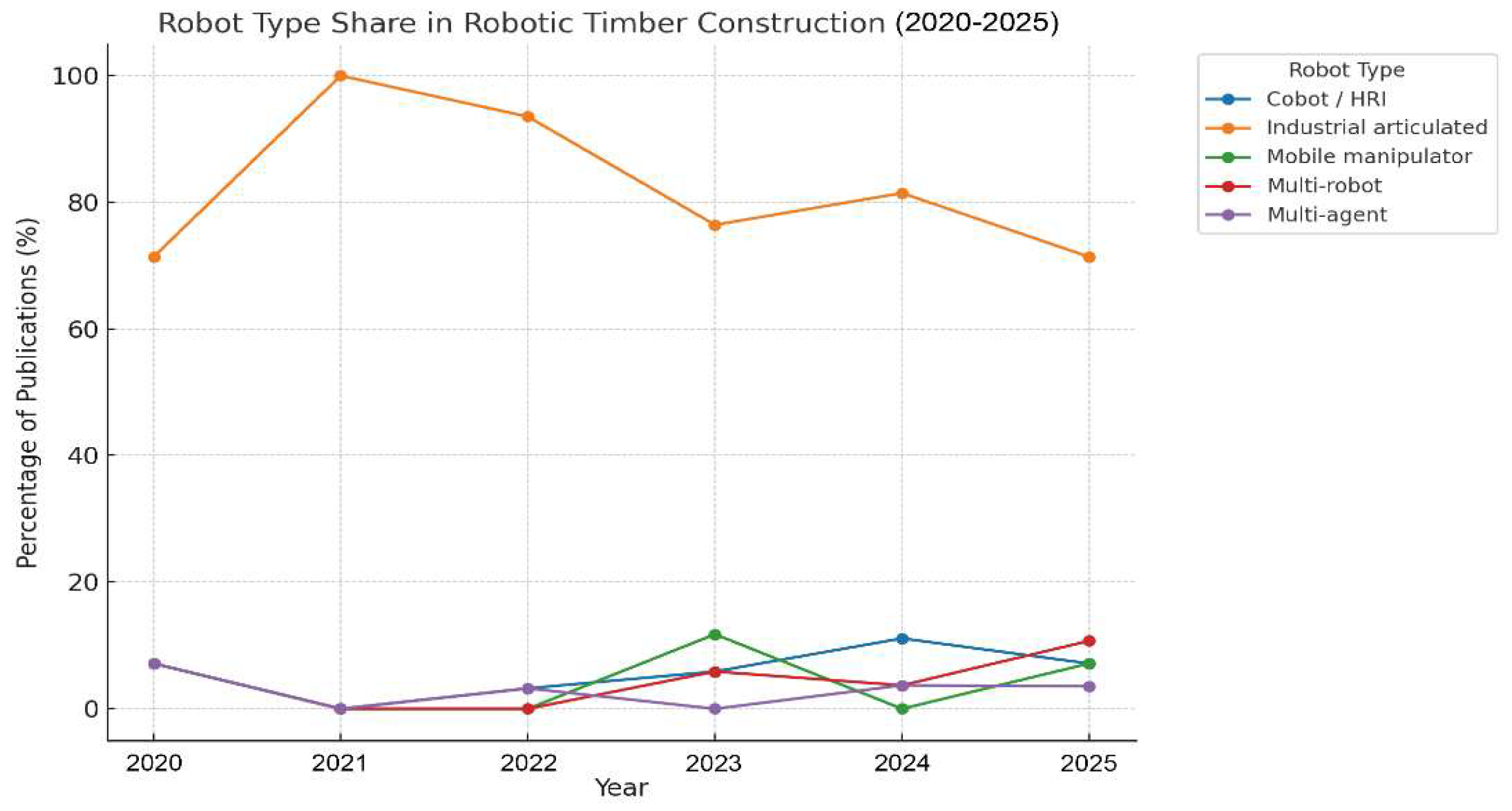
Second, between 2020 and 2025, robotic timber construction
publications were dominated by industrial articulated arms, accounting for an
average of 82.4% of the literature. Their share remained consistently high each
year, indicating the field’s ongoing reliance on fixed, factory-based robotic
platforms. Cobot/HRI systems represented about 5.8%, appearing intermittently
from 2020 onward in hybrid workflows combining human adaptability with robotic
precision. Mobile manipulators (4.3%) emerged after 2023, reflecting growing
experimentation with autonomous or semi-autonomous on-site assembly.
Multi-robot systems (4.6%) appeared sporadically until 2025, when they reached
their peak share, suggesting heightened interest in coordinated, distributed
construction methods. The multi-agent category (2.9%) covered studies using
decentralized, agent-based control frameworks, often in simulation or
early-stage prototypes. Overall, while articulated arms still dominate, the
gradual rise of mobile, collaborative, and multi-agent approaches indicates a
slow but steady diversification of robotic platforms in timber construction
research.
Figure 10.
Temporal distribution of robot construction types based on surveyed studies.
Based on these analysis various categories were identified
and used in the Comparative Analysis Table. Categories such as Robotic
Technique, AI Integration, TRL and HRI Level, and Environmental Metrics were
defined explicitly in response to observable research trends and gaps
identified through keyword clustering. Thus, the comparative analysis not only
benchmarks selected case studies but also critically aligns with contemporary
and emergent research trajectories, offering a robust, data-informed synthesis
of current practices in robotic timber construction.
3.2. Comparative Analysis
The comparative analysis approach aims to evaluate the
state-of-the-art advances in robotic timber construction in the period between
2020 to 2025. A curated set of twelve case studies was selected to reflect a
broad spectrum of technological readiness levels (TRLs), artificial
intelligence (AI) integration strategies, human–robot interaction (HRI)
complexity, lifecycle stages, and material systems. The cases encompass
academic explorations, experimental installations, and fully deployed
industrial applications. The case selection focused on projects that meet at
least four of the following characteristics:
(1) Integration of AI-driven design, optimization, or
decision-making tools
(2) Application of robotic or automated techniques to
timber assembly
(3) Demonstrated lifecycle relevance (design, fabrication,
and/or assembly) and contribution to circular economy and therefore sustainable
construction
(4) Technological readiness with physical prototyping or
deployment evidence
Projects were chosen from peer-reviewed academic
literature, experimental research outputs, and validated field applications.
Preference was given to cases that include detailed documentation of their
methodology and platform architecture.
3.3. Data Source and Tools
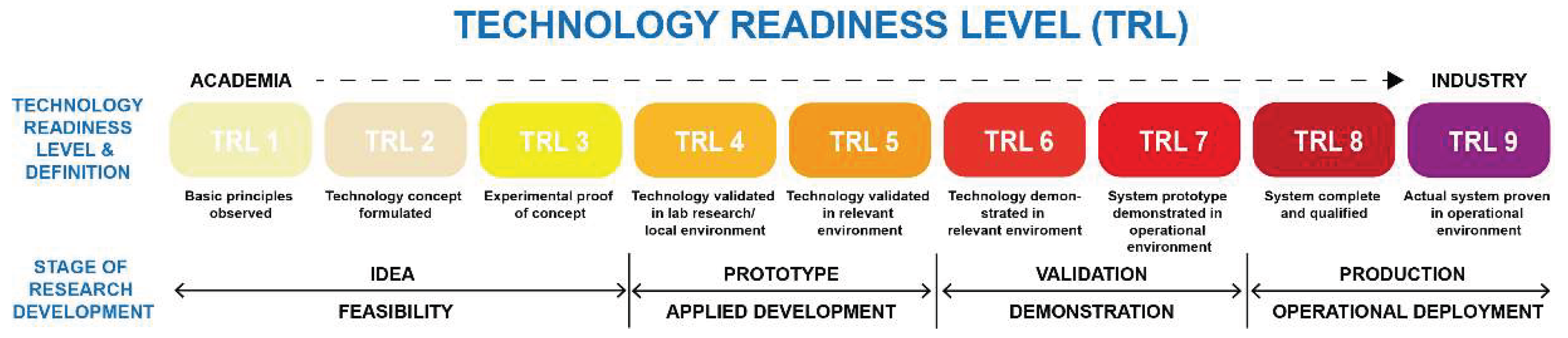
To assess the maturity and real-world applicability of
robotic timber construction systems, we incorporated the Technology Readiness
Level (TRL) framework as visualized in the diagram (Figure 9).
This classification spans from TRL 1 (basic research) to TRL 9 (industry
deployment), bridging academic innovation and industrial implementation. TRL
assessments in this study were informed by standards defined by the European
Union’s Horizon program and NASA guidelines. Each reviewed project was
positioned along the TRL spectrum based on the extent of prototype validation,
field deployment, and operational feedback.
Primary data was extracted from peer-reviewed academic
journals (e.g., Automation in Construction, Frontiers in Robotics and
AI), institutional white papers, and documented project reports.
Supplementary data, including implementation status and system performance, was
cross-verified using institutional repositories and public online datasets.
Structured tables created in Microsoft Word and Excel compiled technical
parameters, system typologies, and deployment scales. TRL estimation was
complemented by an AI integration scale that categorized implementation into limited,
moderate, or extensive use, based on the complexity and role of
AI within the robotic pipeline.
Following tabulation, a pattern analysis was conducted to
identify:
•Recurring technical and design strategies (e.g., discrete
modularity, digital twin integration)
•Novel AI integrations (e.g., reinforcement learning,
agent-based modeling)
•Emergent typologies of robotic timber systems
•Underrepresented areas (e.g., multi-agent swarms)
The insights drawn from this methodology directly inform
the discussion and conclusion sections of the paper, outlining not only the
current state of the field but also strategic gaps and future directions for
research and implementation.
3.4. Comparative Analysis Table

Table 1.
Comparative analysis table for scientific literature on robotic timber construction (2020–2025, 12 cases).
Table 1.
Comparative analysis table for scientific literature on robotic timber construction (2020–2025, 12 cases).
| Study / Project | Robotic Technique | AI integration & Methodology | TRL |
Lifecycle Stage | Materials Handled | Environmental Metrics | Software Used |
|---|---|---|---|---|---|---|---|
| Apolinarska et al., 2020 | Reversible robotic timber assembly | Moderate (Parametric Adaptation Algorithms) | 4 | Prefab | Engineered timbers | Reusability and flexible connections | Parametric design & robot control software |
| Bier et al., 2024 (TU Delft) | Robotic milling & 3D printing with reused wood | Extensive (YOLOv5, ML cutting optimization) | 6 | Prefab | Reclaimed wood & sawdust biopolymer | Full CE loop, CO₂ reduction, local sourcing | Rhino, Grasshopper, YOLOv5 |
| Chai et al., 2022 | Mobile robotic assembly | Extensive (computational design) | 7 | On-site | Cross-laminated timber | Reduced construction waste | Computational design tools & robotic control software |
| Claypool et al., 2025 | Robotic modular Assembly | Extensive (Generative Design, In-browser AR/VR, Digital Twin) | 8 | Mixed | Plywood / engineered timber | Reusable modules, reduced emissions, circular reuse logic | Master Builder, browser-based CAD, Grasshopper |
| Kunic et al., 2021 | Robotic timber truss assembly | Moderate (Digital Twin & Motion Planning) | 5 | Prefab | Engineered timber | Adaptive truss assembly, high flexibility | Digital twin simulation tools & robotic control software |
| Larsen et al., 2022 | Curved oak timber fab | Moderate (Natural Form Optimization) | 6 | Prefab | Naturally curved timber | Natural form utilization & waste reduction | Parametric form-finding software |
| Lauer et al., 2023 | Automated on-site assembly | Extensive (Biomimetic Algorithms) | 7 | On-site | Engineered Timber | Efficient material usage | Parametric form-finding software |
| Leder & Menges, 2024 | Collective robotic construction with ABM | Extensive (Agent-Based Modelling, Digital Twin Sync) | 5-6 | Design, Simulation, Assembly | Spruce timber struts | Real-time robotic adaptation | ABM Framework, Rhino, Grasshopper, Visual Studio |
| Reisach et al., 2024 | Digital circular timber fabrication | Moderate (Circular Design Optimization) | 7 | Prefab | Reclaimed timber | Circular economy integration | Circular economy software |
| Restin, 2020 | Discrete timber assembly | Moderate (Discrete construction Algorithms) | 6 | Mixed | Engineered timber | Improved material efficiency | Discrete construction software |
| Rogeau et al., 2021 | Robotic timber joint fabrication | Extensive (Integrated Toolpath Generation) | 7 | Prefab | Timber plates | Precision fabrication, waste minimization | Automated design software |
| Eduardo, 2023 | AI-based timber optimization | Extensive (Machine Learning & Optimization) | 6 | Prefab | Natural timber | Minimized wood waste | AI optimization software |
3.2. Evaluation
The comparative analysis of 12 projects in robotic timber
construction from 2020 to 2025 reveals a convergence of digital design systems,
AI integration, and sustainable timber workflows. These projects collectively
showcase a multi-dimensional evolution in construction practices that include
computational logic, robotic assembly, and circular strategies. Several key
themes emerge:
•Discrete Modularity: Across nearly all case studies,
discrete timber units (e.g., blocks, joints, trusses) form the basis of robotic
workflows. This modularity facilitates prefabrication, automation, and reuse.
•AI: From object detection (YOLOv5) and component layout
optimization to reinforcement learning in joint assembly and agent-based
modeling for construction choreography AI methods are employed at various
scales.
•Circularity: In recent studies (e.g., Bier, AUAR) timber
reuse and environmental accountability are increasingly central, suggesting
future frameworks will integrate lifecycle data from the outset.
•Human–Machine Collaboration: Several projects (AUAR, Leder
and Menges, Kunic) highlight hybrid intelligence, where humans intervene within
digital twins or augmented interfaces. These interfaces are no longer passive
but constitute co-creative systems.
•Real-time and Distributed Robotics: Studies by Leder &
Menges (2024) and Chai et al. (2022) push beyond pre-programmed sequences,
introducing responsive and multi-agent strategies that adapt to environment,
errors, and progress.
These themes highlight how robotic timber construction is
no longer confined to prefabrication automation or isolated robotic arms.
Instead, the field is evolving toward integrated, adaptive ecosystems where
computation, material feedback, and AI are mutually reinforcing each other.
4. Challenges and Opportunities
The review identifies substantial opportunities in robotic
timber construction driven by advances in automation, prefabrication, discrete
design methods, and circular economy principles. Yet, several significant
challenges still need consideration. For instance, scaling from small-scale
prototypes to large-scale industrial applications. Achieving scalable solutions
requires sophisticated frameworks for handling real-world uncertainties. Taking
the next step involves not only understanding which tasks can be fully
automated vs. HRI-supported but also identifying sequences of tasks. There two
main aspects to consider:
(a) Advanced closed-loop design to construction
requires identifying and advancing computational tools and AI-supported design
to robotic materialization processes of full-scale discrete architecture. The
overall goal is to leverage AI and computational tools to explore vast design
spaces, customizable solutions, and their potential for scalability.
(b) Scalability addressing the disparity between the
scale of robotic setups and the scale of buildings remains a significant
challenge to address. From digital design to prefabrication and on-site
assembly, a parametric design process and automated fabrication data generation
are required to adapt a construction system and its building parts to specific
structural or architectural requirements.
In this context, the potential of AI is in the
combinatorics of discrete timber elements, constrained by robotic assembly,
that can be explored through advanced simulation tools such as Nvidia Omniverse
and robotic development simulators like Isaac. These platforms simulate
real-world physics and synthesize complex workflows. Once encoded,
computational fabric based on data from the robotic assembly of discrete
elements and their joints can be deployed in generative design sequences,
unlocking new design potentials for prefabricated architecture. AI-driven
combinatorics can significantly increase the variability of timber
prefabrication, achieve unprecedented variability while reduce the carbon
footprint and construction costs, which is achieved by combining robotization
for efficient mass production with circular principles.
Realizing these opportunities demands stronger
interdisciplinary collaboration across architecture, robotics, structural
engineering, and sustainability domains. By addressing these challenges,
robotic timber construction can evolve toward scalable, adaptive, and genuinely
circular construction practices, reshaping the future of architectural
production.
5. Conclusions
This paper presets critically reviewed recent advancements
in robotic timber construction, highlighting notable progress in automation, AI
integration, discrete architecture, and circular construction practices. The
comparative analysis of key projects from 2020 to 2025 underscores the
evolution towards increasingly intelligent and adaptive construction paradigms.
However, critical synthesis reveals persistent challenges, notably scalability
issues, and incomplete lifecycle integration.
Emerging technological solutions, such as digital twins,
AI-driven real-time adaptation, advanced combinatorial simulation, and circular
economy frameworks—present promising pathways to overcome current limitations.
Further research will focus explicitly on embedding semantic intelligence
within discrete modular systems, developing robust multi-agent robotic
ecosystems, and leveraging AI and HRI for intuitive human–machine interactions
in design-to-construction workflows.
Scaling robotic timber construction from proof-of-concept
projects to industry-wide applications demands robust solutions for integrated
design to construction processes. This includes overcoming limitations in
wireless communication, handling of unpredictable site conditions, human skill
building, etc. Addressing these challenges requires collaboration between
technology developers, construction firms, policymakers, and educational
institutions to create adaptable, efficient, and cost-effective solutions for
robotic construction.
Author Contributions
Conceptualization, F.C., H.B., N.W. and
A.A.; methodology, F.C. and H.B.; software, F.C.; writing—original draft
preparation, F.C. and N.W.; writing—review and editing, F.C. and H.B.; case
study, F.C., H.B. and N.W.; table analysis, F.C. and H.B.; supervision, H.B.
and A.A. All authors have read and agreed to the published version of the
manuscript.
Conflicts of Interest
The authors declare no
conflicts of interest.
| [1] | Link to UNECE report: https://unece.org/sites/default/files/2023-05/ECE_TIM_DP95E_web.pdf
|
| [2] | Link to McKinsey report: https://www.mckinsey.com/featured-insights/themes/how-automation-is-shaping-the-future-of-work
|
References
- Bock, T. The future of construction automation: Technological disruption and the upcoming ubiquity of robotics. Automation in Construction 2015, 59, 113–121. [Google Scholar] [CrossRef]
- Concu, G. Wood in Civil Engineering; IntechOpen: Rijeka, 2017. [Google Scholar] [CrossRef]
- Shan, X.; et al. Wood for Application in Electrochemical Energy Storage Devices. Cell Reports Physical Science. [CrossRef]
- Jeska, S.; Pascha, K.S. Emergent timber technologies: materials, structures, engineering, projects; Birkhäuser: Basel Boston, 2015. [Google Scholar]
- Willmann, J.; Gramazio, F.; Kohler, M. New paradigms of the automatic. In Advancing Wood Architecture, 1st ed.; Menges, A., Schwinn, T., Krieg, O.D., Eds.; Routledge: New York, 2016; pp. 13–28. [Google Scholar] [CrossRef]
- Lachance, E.; Lehoux, N.; Blanchet, P. Automated and robotized processes in the timber-frame prefabrication construction industry: A state of the art. In Proceedings of the 2022 IEEE 6th International Conference on Logistics Operations Management (GOL), Strasbourg, France, June 2022; pp. 1–10. [Google Scholar] [CrossRef]
- Lauer, P.R.; et al. Automated on-site assembly of timber buildings on the example of a biomimetic shell. Automation in Construction 2023, 156, 105118. [Google Scholar] [CrossRef]
- Dindorf, R.; Wos, P. Challenges of Robotic Technology in Sustainable Construction Practice. Sustainability 2024, 16, 5500. [Google Scholar] [CrossRef]
- Rane, N. Roles and Challenges of ChatGPT and Similar Generative Artificial Intelligence for Achieving the Sustainable Development Goals (SDGs). SSRN Journal 2023. [CrossRef]
- Haidegger, T.; et al. Robotics: Enabler and inhibitor of the Sustainable Development Goals. Sustainable Production and Consumption 2023, 43, 422–434. [Google Scholar] [CrossRef]
- Retsin, G. Discrete Timber Assembly. Apr. 2020.
- Larsen, N.M.; Aagaard, A.K. Exploring Natural Wood. In Proceedings of the ACADIA 2019: Ubiquity and Autonomy, Austin (Texas), USA; 2019; pp. 500–509. [Google Scholar] [CrossRef]
- Tamke, M.; Thomsen, M.; Riiber, J. Complex Geometries in Wood. Jan. 2008, pp. 65–68.
- Leder, S.; Weber, R.; Wood, D.; Bucklin, O.; Menges, A. Distributed Robotic Timber Construction. In Proceedings of the ACADIA 2019: Ubiquity and Autonomy, Austin (Texas), USA; 2019; pp. 510–519. [Google Scholar] [CrossRef]
- Petersen, K.H.; Napp, N.; Stuart-Smith, R.; Rus, D.; Kovac, M. A review of collective robotic construction. Sci. Robot. 2019, 4, eaau8479. [Google Scholar] [CrossRef]
- Wagner, H.J.; Alvarez, M.; Kyjanek, O.; Bhiri, Z.; Buck, M.; Menges, A. Flexible and transportable robotic timber construction platform – TIM. Automation in Construction 2020, 120, 103400. [Google Scholar] [CrossRef]
- Bier, H.; Khademi, S.; van Engelenburg, C.; Prendergast, J.M.; Peternel, L. Computer Vision and Human–Robot Collaboration Supported Design-to-Robotic-Assembly. Construction Robotics 2022, 6, 251–257. [Google Scholar] [CrossRef]
- Bier, H.; Hidding, A.; van Engelenburg, C.; Ali, T. Advancing Sustainable Approaches in Architecture by Means of Design-to-Robotic-Production. SPOOL 2024, 11, 65–70. [Google Scholar] [CrossRef]
- Kasperzyk, C.; Kim, M.-K.; Brilakis, I. Automated re-prefabrication system for buildings using robotics. Automation in Construction 2017, 83, 184–195. [Google Scholar] [CrossRef]
- Orlowski, K. Assessment of Manufacturing Processes for Automated Timber-Based Panelised Prefabrication. Buildings 2019, 9, 125. [Google Scholar] [CrossRef]
- Vercruysse, E. THE ANATOMY OF A SKELETON:: HYBRID PROCESSES FOR LARGE-SCALE ROBOTIC FABRICATION. 2020, pp. 226–233. [CrossRef]
- Rocha, P.F.; Ferreira, N.O.; Pimenta, F.; Pereira, N.B. Impacts of Prefabrication in the Building Construction Industry. Encyclopedia 2022, 3, 28–45. [Google Scholar] [CrossRef]
- Popovic, D. Off-site manufacturing systems development in timber house building: Towards mass customization-oriented manufacturing. PhD Thesis, 2018.
- Cheng, F.-C.; Yen, C.-C.; Jeng, T.-S. Object Recognition and User Interface Design for Vision-based Autonomous Robotic Grasping Point Determination. In Proceedings of the CAADRIA 2021: Projections, Hong Kong; 2021; pp. 633–642. [Google Scholar] [CrossRef]
- Chai, H.; Wagner, H.J.; Guo, Z.; Qi, Y.; Menges, A.; Yuan, P.F. Computational design and on-site mobile robotic construction of an adaptive reinforcement beam network for cross-laminated timber slab panels. Automation in Construction 2022, 142, 104536. [Google Scholar] [CrossRef]
- Chan, C.; Pelosi, A.; Brown, A. VR Controlled Remote Robotic Teleoperation for Construction Applications. In Proceedings of the eCAADe 2023: Digital Design Reconsidered, Graz, Austria; 2023; pp. 369–376. [Google Scholar] [CrossRef]
- Hsu, J.-S.; Shen, Y.-T.; Cheng, F.-C. The Development of the Intuitive Teaching-Based Design Method for Robot-Assisted Fabrication Applied to Bricklaying Design and Construction. In HCI International 2022 Posters; Stephanidis, C., Antona, M., Ntoa, S., Eds.; Communications in Computer and Information Science; Springer International Publishing: Cham, 2022; Volume 1583, pp. 51–57. [Google Scholar] [CrossRef]
- Gharbia, M.; Chang-Richards, A.; Lu, Y.; Zhong, R.Y.; Li, H. Robotic technologies for on-site building construction: A systematic review. Journal of Building Engineering 2020, 32, 101584. [Google Scholar] [CrossRef]
- Naser, M.Z. Fire resistance evaluation through artificial intelligence - A case for timber structures. Fire Safety Journal 2019, 105, 1–18. [Google Scholar] [CrossRef]
- Rad, R.; Burton, H.; Rogeau, N.; Vestartas, P.; Weinand, Y. A framework to automate the design of digitally-fabricated timber plate structures. Computers & Structures 2021, 244, 106456. [Google Scholar] [CrossRef]
- Rogeau, N.; Latteur, P.; Weinand, Y. An integrated design tool for timber plate structures to generate joints geometry, fabrication toolpath, and robot trajectories. Automation in Construction 2021, 130, 103875. [Google Scholar] [CrossRef]
- Eduardo, S.; Minimizing Wood Waste by Respecting Its Natural Form Through AI. ArchDaily. Available online: https://www.archdaily.com/1006700/minimizing-wood-waste-by-respecting-its-natural-form-through-ai (accessed on 30 May 2025).
- Lai, Z.; Xiao, Y.; Chen, Z.; Li, H.; Huang, L. Preserving Woodcraft in the Digital Age: A Meta-Model-Based Robotic Approach for Sustainable Timber Construction. Buildings. [CrossRef]
- Klemmt, C.; Pantic, I.; Gheorghe, A.; Sebestyen, A. Discrete vs. In Discretized Growth. In Proceedings of the ACADIA 2019: Ubiquity and Autonomy, Austin (Texas), USA; 2019; pp. 542–553. [Google Scholar] [CrossRef]
- de Paula. Discrete Automation: Robotic Construction Workflow for Reconfigurable Timber Housing. 2023. Available online: https://repository.tudelft.nl/record/uuid:c3436d86-c7d7-48c2-833a-d2fad07fabe5 (accessed on 30 May 2025).
- Gramazio, F.; et al. (Eds.) The robotic touch: how robots change architecture; Gramazio & Kohler Research ETH Zurich 2005-2013; Park Books: Zürich, 2014. [Google Scholar]
- Menges, *!!! REPLACE !!!*; Sheil, B.; Glynn, R.; Skavara, M. Menges; Sheil, B.; Glynn, R.; Skavara, M. Fabricate 2017, 2017. [Google Scholar] [CrossRef]
- Apolinarska, *!!! REPLACE !!!*; Kuhn, M.; Gramazio, F.; Kohler, M. Apolinarska; Kuhn, M.; Gramazio, F.; Kohler, M. Performance-Driven Design of a Reciprocal Frame Canopy - Timber structure of the FutureTree. Jan. 2021, pp. 497–504. [CrossRef]
- Robeller. Integral Mechanical Attachment for Timber Folded Plate Structures. Lausanne, EPFL, 2015. [CrossRef]
- Shen, Y.-T.; Hsiao, W.-T. Robot Construction: The Development of Metal Bending Robotic Arm Based on Discrete Design Apply to Self-Standing Wall Construction. Journal of Architecture 2022, 122, 73–88. [Google Scholar] [CrossRef]
- Claypool, M.; Garcia, M.J.; Retsin, G.; Jaschke, C.; Saey, K. Discrete Automation. In Proceedings of the ACADIA 2020: Distributed Proximities, Online and Global; 2020; pp. 638–647. [Google Scholar] [CrossRef]
- Restin, G.; Discrete Timber Architecture by Gilles Retsin. Issuu. Available online: https://issuu.com/bartlettarchucl/docs/design-research-retsin-timber-04 (accessed on 30 May 2025).
- Van Loon, P.; Diener, D.; Harris, S. Circular products and business models and environmental impact reductions: Current knowledge and knowledge gaps. Journal of Cleaner Production 2021, 288, 125627. [Google Scholar] [CrossRef]
- Van Gulck, L.; Steeman, M. The environmental impact of circular building design: A simplified approach to evaluate remountable building elements in life cycle assessment. Building and Environment 2024, 254, 111418. [Google Scholar] [CrossRef]
- Reisach, *!!! REPLACE !!!*; Schütz, S.; Willman, J.; Schneider, S. Reisach; Schütz, S.; Willman, J.; Schneider, S. Digital Fabrication for Circular Timber Construction: A Case Study. CE. [CrossRef]
- Bruun, P.G.; Besler, E.; Adriaenssens, S.; Parascho, S. Scaffold-free cooperative robotic disassembly and reuse of a timber structure in the ZeroWaste project. Construction Robotics. [CrossRef]
Figure 1.
Robotically assembled prototypes using one or more robots © ETH Zurich [14].
Figure 1.
Robotically assembled prototypes using one or more robots © ETH Zurich [14].

Figure 2.
CV and HRI assembly of scaled prototype © TU Delft [17].
Figure 2.
CV and HRI assembly of scaled prototype © TU Delft [17].
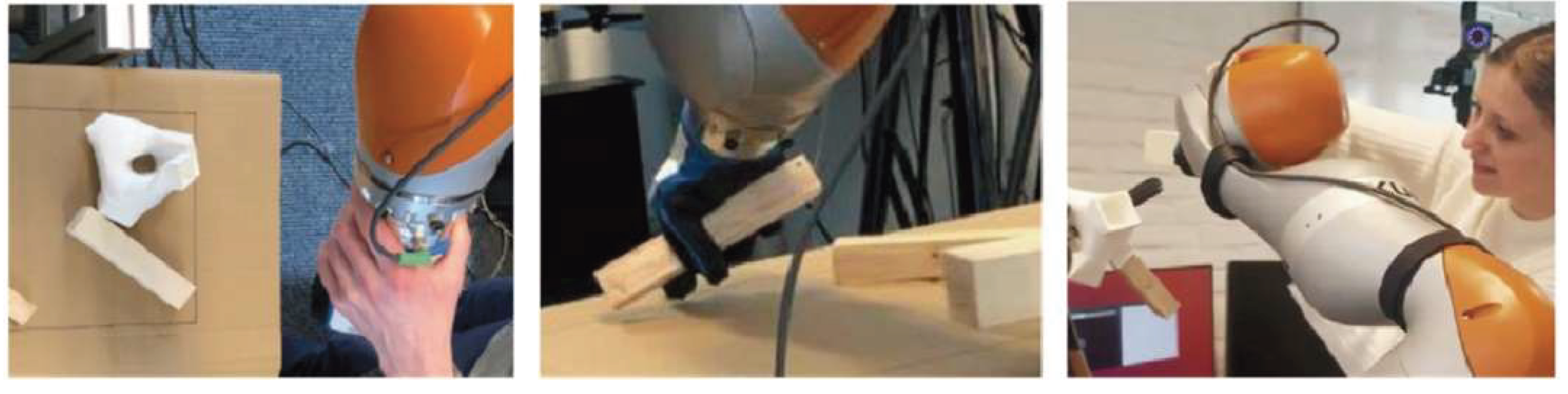
Figure 3.
Pre-assembly timber structure (left) and the on-site assembly of large components (right) © University of Stuttgart [16].
Figure 3.
Pre-assembly timber structure (left) and the on-site assembly of large components (right) © University of Stuttgart [16].

Figure 4.
On-site fabrication scenario repeating workflow of five routines, scan, pick, glue, place, nail beam process © U Tongji [7,25].
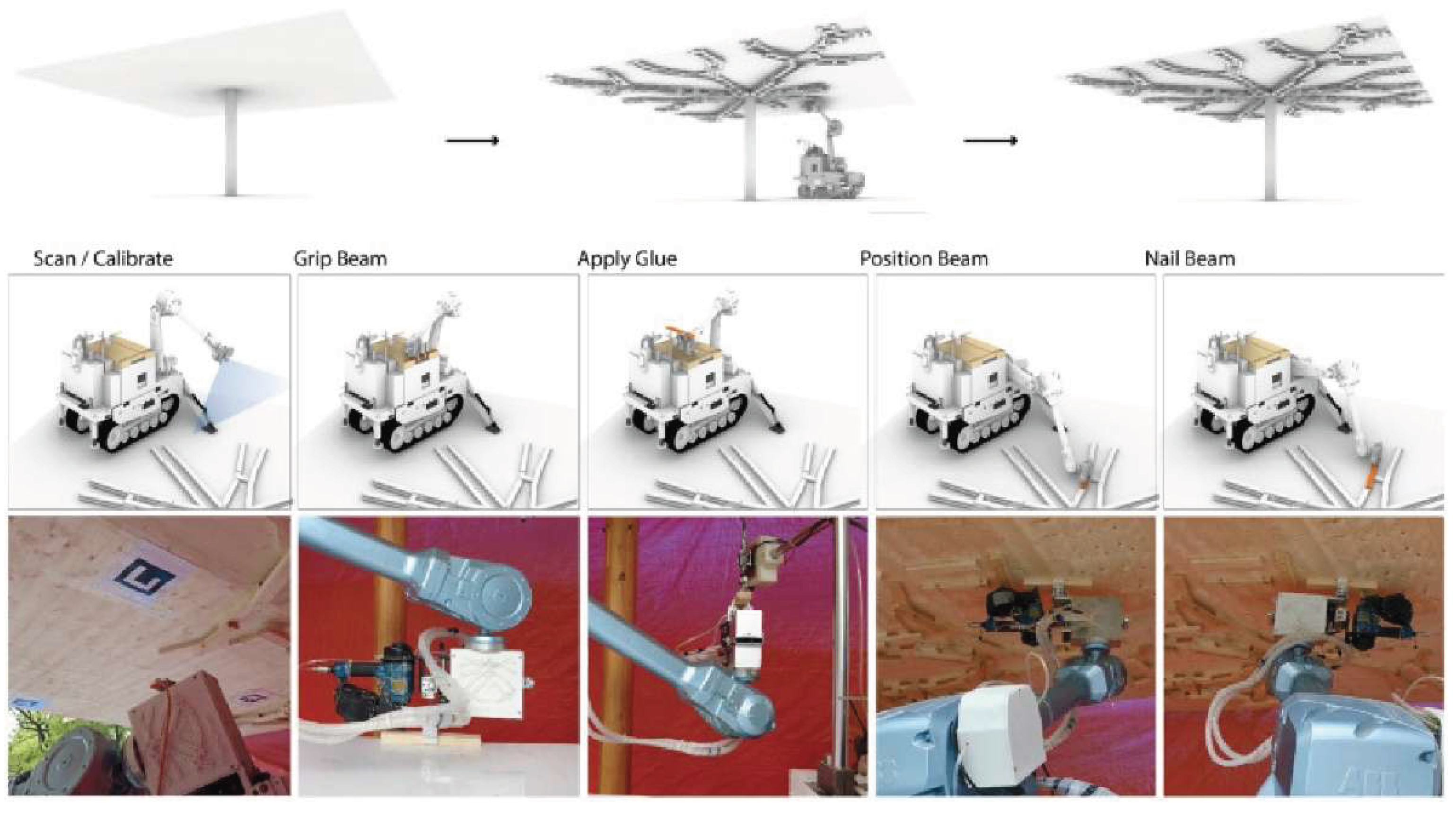
Figure 5.
Continuous workflow of computational design, optimization, and robotic fabrication steps for constructing planar timber slabs © EPFL.
Figure 5.
Continuous workflow of computational design, optimization, and robotic fabrication steps for constructing planar timber slabs © EPFL.
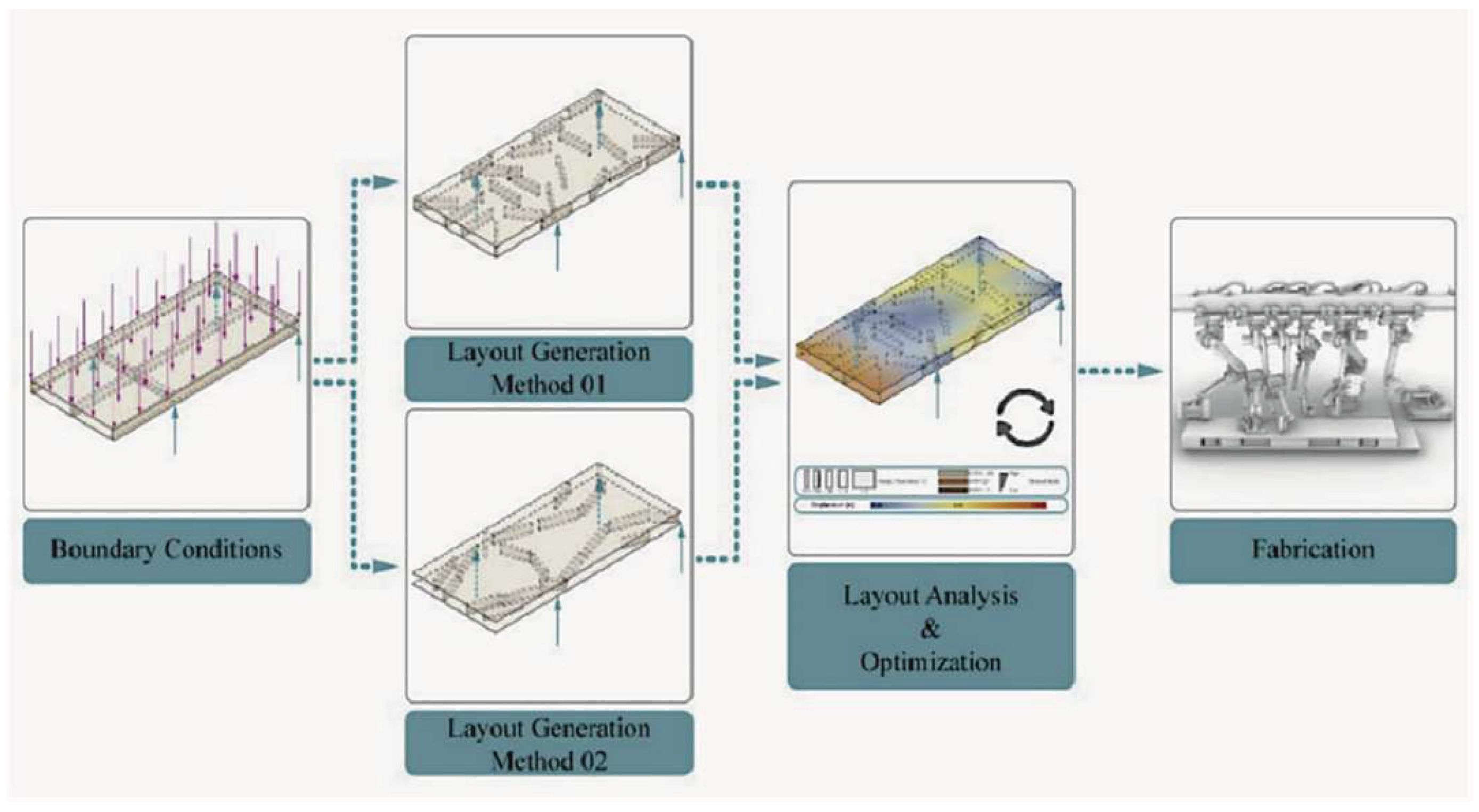
Figure 6.
Timber structure discretization process and component placement. Adapted from Timber structure discretization process and component placement © U Cincinnati [34].
Figure 6.
Timber structure discretization process and component placement. Adapted from Timber structure discretization process and component placement © U Cincinnati [34].
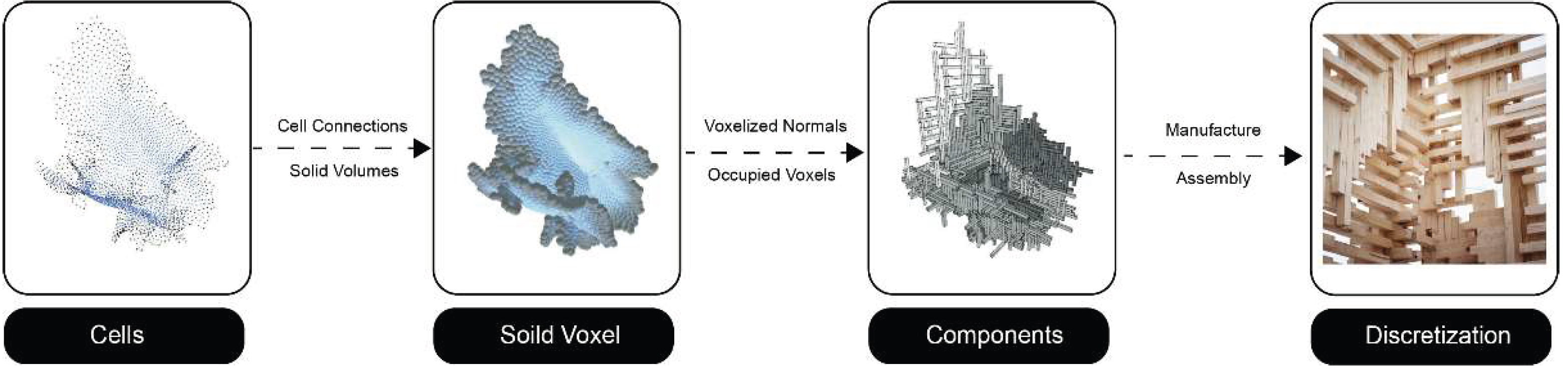
Figure 7.
Computer Vision identifies defects in reclaimed wood © TU Delft [18].
Figure 7.
Computer Vision identifies defects in reclaimed wood © TU Delft [18].
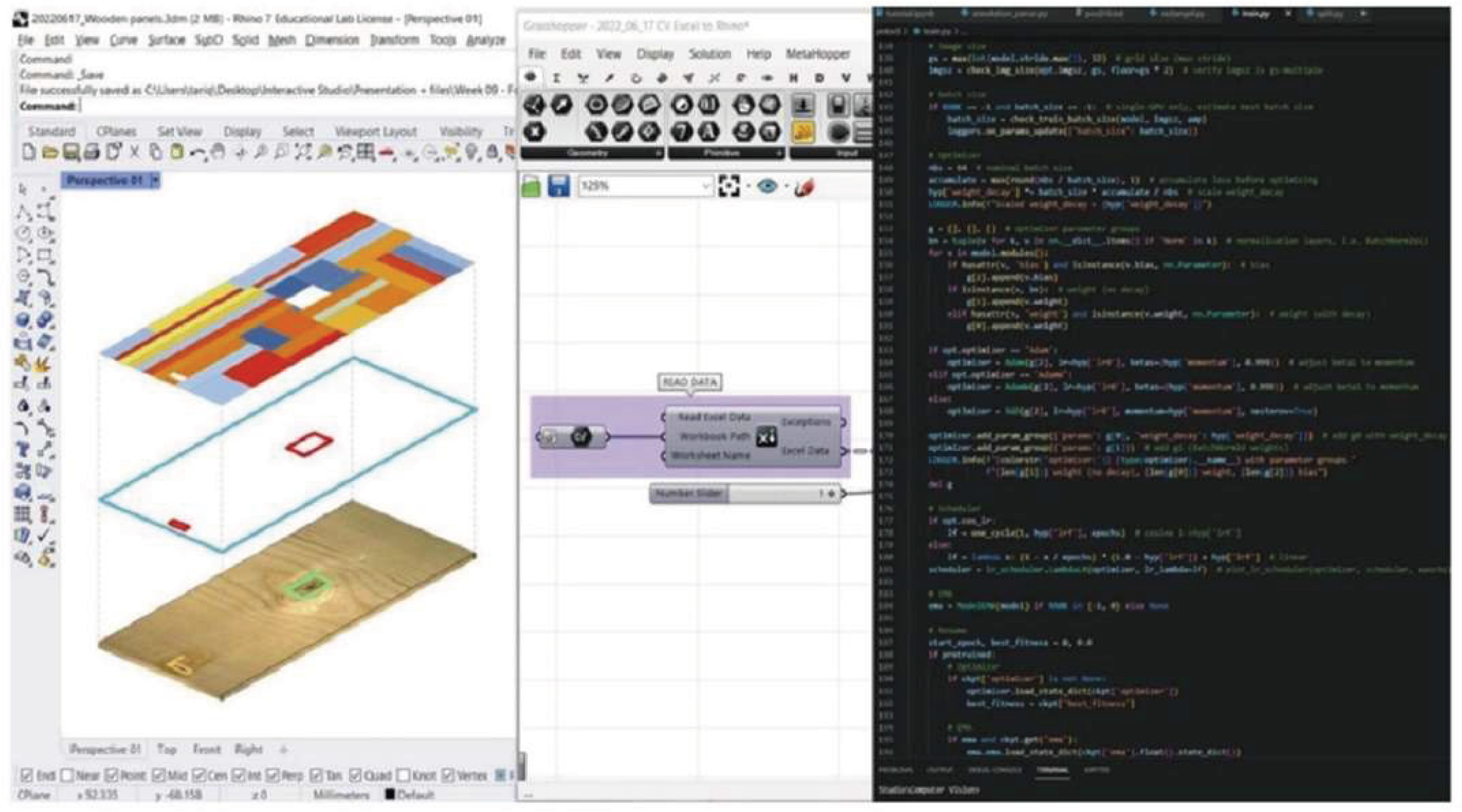
Figure 8.
The progression of research papers using robotic technology in timber architecture.
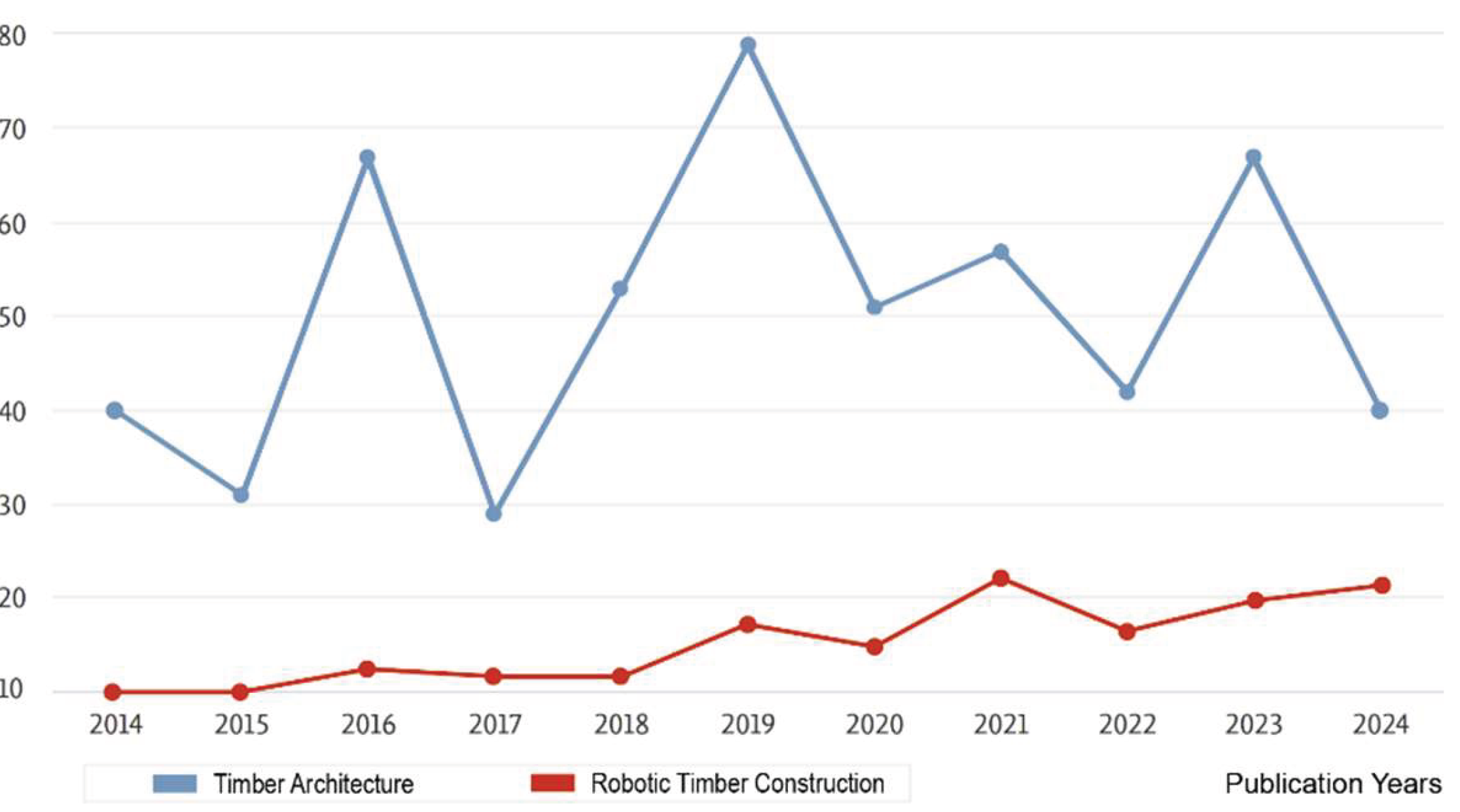
Figure 9.
Visual Analysis of key research co-occurrence (2020-2025).
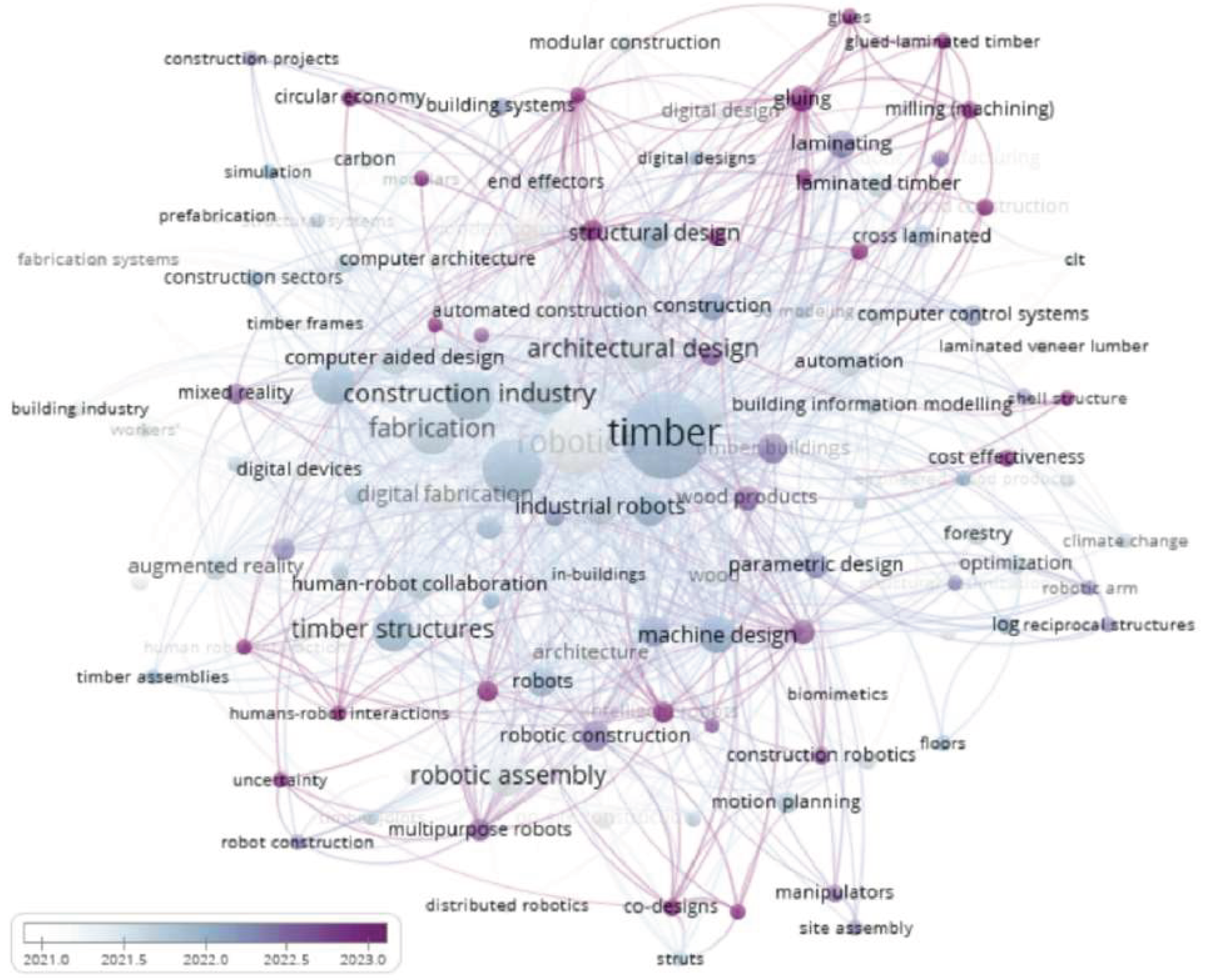
Figure 9.
Technology Readiness Level (TRL) framework integration.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



