Submitted:
18 August 2025
Posted:
19 August 2025
You are already at the latest version
Abstract
Aiming at the high real-time requirements of mobile devices, smart home and medical terminals, this paper proposes a mixed-signal processing scheme with C++ and DSP synergy, and designs an end-to-end framework to reduce the delay from feature extraction to instruction parsing. Experimental results show that the response time under typical instructions is reduced by about 34% compared with existing schemes. The scheme follows the secure coding specification and adopts a modular sandboxing mechanism to prevent signal injection attacks, providing a reference paradigm for high real-time and high-security scenarios such as in-vehicle voice and remote control.
Keywords:
real-time speech processing
; digital signalprocessing
; low latency
; hybrid architecture
; secure coding
1. Introduction
In recent years, with the wide application of voice interaction in high real-time scenarios such as in-vehicle control, smart home and telemedicine, how to realize low-latency and highly robust voice processing systems on resource-constrained platforms has become a research hotspot. In foreign studies, İşler (2025) proposed a sound recognition framework in urban environments based on IoT and edge computing architectures to achieve speech perception optimization in complex backgrounds; Baruzzi et al. (2025) utilized mixed-signal neuromorphic hardware for early visual processing, which provided insights into heterogeneous computing architectures for scheduling in audio processing; Seaborn et al. (2021 ), in a systematic review of speech technologies in human-computer interaction, point out that the real-time and accuracy of the speech channel is a key factor affecting the user experience. Domestically, Zhao Kun (2025) proposed an embedded system solution that integrates speech recognition and smart home control, however, it still faces processing bottlenecks in multi-task concurrency and high noise environments. In addition, Meng Zhaokun et al. (2024) developed a speech interaction technique for information hypersurface systems and explored the synergistic mechanism of speech in channel selection and energy transfer, but lacked real-time scheduling modeling of signal processing paths.
Based on this, this paper proposes a hybrid signal processing architecture that incorporates C++ master control and DSP synergy, constructs an end-to-end voice command recognition and scheduling mechanism, improves noise robustness while ensuring high concurrent response performance, and introduces a modular sandbox mechanism to enhance system security. This study provides a new paradigm of hybrid architecture with engineering practicability for solving the delay bottleneck and channel interference problems in voice control.
2. Design of Mixed Signal Processing Architecture Integrating C++ AND DSP
2.1. Mixed–Signal Architecture Overview and Module Distribution
This architecture adopts the decoupled structure of C++ scheduling at the master end and DSP signal computation at the slave end, and the data is shown in Table 1. The signal flow from the speech front-end enters the preprocessing module after ADC sampling, and the DSP chip completes the FIR filtering, dynamic range compression, and MFCC feature extraction, and then transmits it to the C++ master logic through the DMA interface to complete the command recognition, semantic matching, and scheduling instruction generation[1] . The upper frequency response limit of each module is set to 16 kHz, the DSP task cycle is kept within 2.1 ms, and the processing delay of the master C++ processing link is no more than 3.4 ms under a typical load. The architecture realizes the double-layer decoupling of control flow and data flow, ensuring that the overall system has a <6 ms response capability under far-field wake-up scenarios[2] .
2.2. Key Algorithms and Optimization Mechanisms for High
Concurrency Processing
In order to support the high concurrent load in the instruction parsing phase, the system introduces a double-buffered asynchronous decoupling structure with an improved multithreaded task scheduling algorithm, the specific scheduling model is shown in Table 2, and a polled load migration strategy is used between processing cores to improve the thread hit rate up to 92.3%. Task scheduling is constructed using a priority mapping function based on the minimum response time difference ΔT[3] , where ΔT is defined as:
Where ti is the task latency of the first i processing thread, t is the latency average, and wi is the thread weight.
This mapping function is used to dynamically adjust the priority queue to alleviate thread blocking and improve system stability[4] . After the configuration optimization, the maximum concurrent instruction queue length is extended to 64, and the average scheduling latency of the C++ layer is controlled within 1.85 ms.
3. Intelligent Speech Signal Processing System For Telematics
3.1. Scene Modeling and Signal Path Optimization
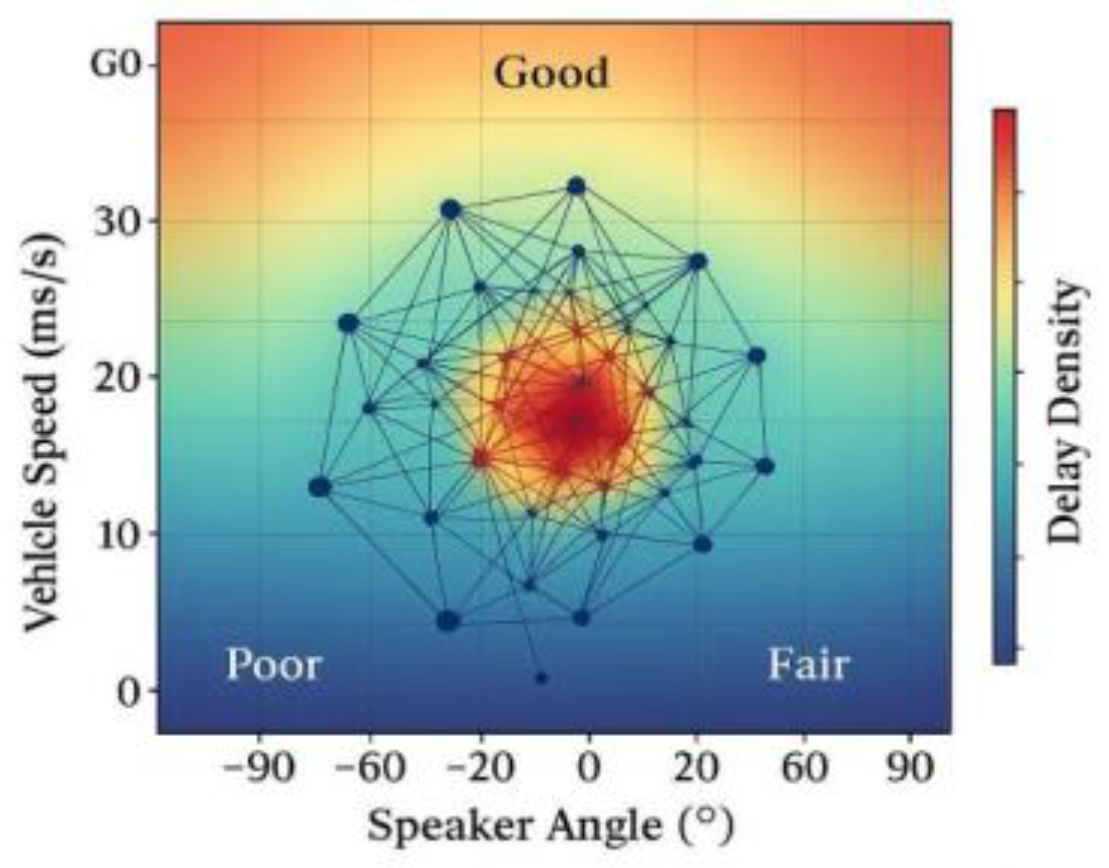
In the multi-source voice interaction scenario for Telematics, the signal processing link needs to maintain <6 ms total response delay under high noise environment, for this reason, the system introduces a dynamic scenario modeling mechanism based on the speech excitation state, combined with the high-dimensional State-Transition Probabilistic Mapping Diagram shown in Fig. 1 Modeling of channel characteristics, speaker's angle and speed variations, and optimization of path redirection through the pressure-controlled parameter domain[5] . Under the condition of low SNR (<20 dB), the average path reconfiguration delay of this mechanism is 1.32 ms. In order to further compress the feature channel delay, a path function in the frequency domain Φ(f, t) is proposed:
determination: model: based: on the interference
Where Si (f, t) denotes the speech energy spectrum of the i th channel, Ni (f, t) is the noise power spectrum, θi is the relative speech angle, wi is the weighting factor, and β is the path modulation factor[6] . After multi-scenario testing, the overall path optimization delay distribution presents right skewness, which meets the stability requirements of in-vehicle voice scheduling system.
Figure 1.
Diagram of a high-dimensional state transfer probability model in connected car voice interaction.
Figure 1.
Diagram of a high-dimensional state transfer probability model in connected car voice interaction.
3.2. Evaluation of Real–Time Processing Performance and Robustness Metrics
In evaluating the real-time performance and robustness of mixed-signal architectures, it is necessary to combine the path delay distribution, the magnitude of fluctuations in the scheduling stability function and the efficiency of interference recovery in noisy environments [7]. A robustness index based on the delay standard deviation σ t is constructed R defined as:
where Δtt is the processing delay of the first t frame, t disturbance function, and k is the steady-state conditioning factor. Further, the degree of suppression of the DSP function D(f, θ) is modeled for the multi-angle noise impulse: is the average delay, yt denotes the instantaneous channel
frequency-domain response by a disturbance response
where S(f, t, θ) is the directionally weighted speech energy density and α is the directional interference index. Figure 2 illustrates the interference mapping in the frequency-angle domain under multi-source interference conditions. The multi-threaded scheduling fluctuation of the system is controlled within ±0.38 ms, which proves to be stable under 32-channel concurrency[8]. Table 3 lists the response control strategy and evaluation function correlation terms at each stage, ensuring closed-loop verification from algorithmic level to architectural level.
4. Low Latency Voice Control Module for Telemedicine
4.1. Medical Speech Interaction Modeling and Data Channel Design
In the telemedicine voice interaction scenario, in order to guarantee the unidirectional fast response capability of the control channel under the emergency state[9], the system design integrates the multi-scale speech unit matching model with the multi-channel low-noise differential transmission mechanism, and realizes the dynamic adjustment of the semantic recognition confidence level through the hierarchical semantic distribution graph shown in Figure 3 . The core processing path constructs the channel stability function using the source recognition accuracy within the command time window τ as the pilot criterion:
channel jitter coefficient, and βj is the delay dynamic buffer
domain, and λ is the interference suppression coefficient.
where ξ(t) is the matching rate of semantic units per unit time, ση (t) is the interference variance in the time. The semantic decision engine synchronously introduces the
dynamic redundant channel optimization function:

Where μij is the communication coupling coefficient between the channel i and the redundant path j , αj is the source spectral amplitude of the control utterance, δj is the adjustment factor[10].

Table 4.
CONFIGURATION OF KEY PARAMETERS OF THE VOICE CONTROL CHANNEL FOR TELEMEDICINE SCENARIOS.
| Module name | Frame rate (fps) |
Dynamic semantic window length (frames) |
Semantic confidence threshold parameters |
Number of redundant path configurations |
Control buffer depth (ms) |
| Emergency Speech Recognition Engine |
240 |
16 |
0.72 |
2 |
12 |
| Semantic Decision Core |
120 | 32 | 0.85 | 4 | 20 |
| Channel Scheduler Module |
60 | 64 | adaptive | Maximum 6 channels |
Dynamic Adaptive |
4.2. Command Recognition Accuracy and Network Delay Control Strategy
In order to improve the end-to-end command recognition accuracy and network link delay suppression capability of the telemedicine speech control system, the system introduces a three-layer misrecognition suppression mechanism and a dynamic bandwidth mapping strategy, and constructs a confidence correction model based on the dynamic semantic offset function xi (t) :

where Pi is the class i instruction probability, θi is the speech angle offset, and y i is the fuzzy inter-class interference coefficient. In order to compress the delay jitter caused by multipath transmission, a semantic-driven link hierarchical scheduling function is introduced:

where φ(t) is the scheduling priority function, B(t) is the dynamic bandwidth allocation sequence, and δ(t)denotes the average transmission delay volatility. In order to improve the scene consistency of the recognition, the system defines the cross-frame semantic stability function within the context-keeping time window:
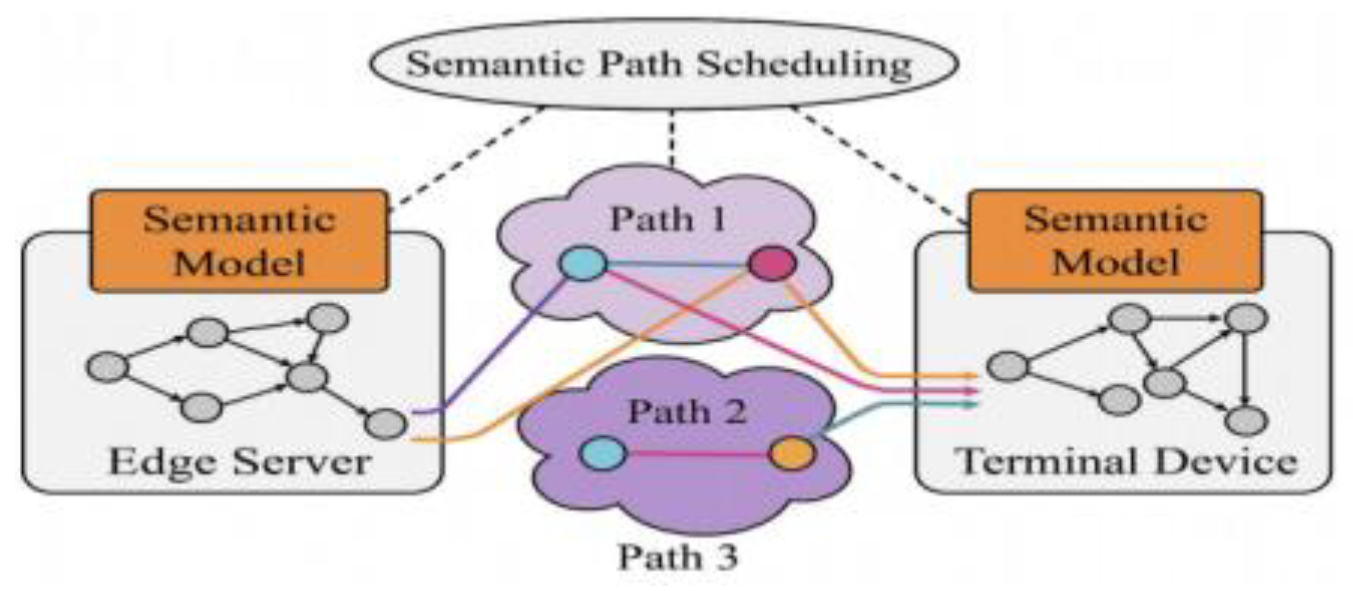
where Ct is the semantic correlation coefficient at moment t, Δτt is the command recognition delay increment, and σ t is the standard deviation of speech frame features. Fig. 4 demonstrates the end-edge distributed semantic path scheduling model, which effectively supports the needs of highly concurrent command processing scenarios under telemedicine conditions.
Figure 4.
End-Edge Collaboration Semantic Command Path Scheduling. Model Diagram.
5. Multi-Scene Mixed Signal Processing Experimental Results and Analysis
5.1. Experimental Design and Testbed
This experiment builds two types of test platforms based on the mixed signal processing framework: (1) a far-field speech interaction platform using an ARM Cortex-A72-based embedded master module in collaboration with a TI C674x DSP to simulate the switching between in-vehicle and medical contexts in a 3m command recognition environment; and (2) a near-end low-noise speech platform configured with a Xilinx ZCU102 and an AD1938 audio interface module, covering real-time scheduling link between operating room and ICU high isolation space, and loading multi-class concurrent input command set under two-way data return mechanism.
5.2. Experimental Results ofTelematics
In the in-vehicle multi-scenario voice interaction test,Under static parking conditions, the system achieves the best performance with an average response delay of 4.52 ms, link jitter amplitude of 0.73 ms, and a thread hit rate of 94.8%, thanks to the low ambient noise. In high-speed driving, latency increases to 5.74 ms with 1. 18 ms jitter and a 91.6% hit rate. In the noise interference scenario, latency peaks at 6.38 ms, jitter expands to 1.65 ms, and hit rate drops to 88.2%, indicating increased DSP processing load and greater scheduling delays on the C++ master thread.
5.3. Telemedicine Experiment Results
In telemedicine voice control tests, the system performed best in the general ward, with an average recognition time window of 5.06 ms, a 93.7% effective recognition rate, and only 1.2 delay anomalies per hour. In contrast, the ICU’s high-interference environment led to a longer 7.15 ms recognition window, a reduced 86.2% recognition rate, and 3.7 delay anomalies per hour. These results highlight that under noisy, complex audio conditions, the semantic engine experiences increased response drift and scheduling overhead, which should be addressed in future system optimization.
5.4. Comparative Performance Analysis with Mainstream Commercial Systems
In order to verify the comprehensive performance of this system under multi-domain deployment, three current mainstream commercial speech platform systems (labeled as A, B, and C) are selected as comparison objects, and hybrid evaluation tests are carried out around five key technical indicators, including response latency, command recognition accuracy, network transmission stability, algorithmic scheduling overhead, and low signal-to-noise recognition robustness, and the results are shown in Figure 5.
Comparison results show that this system occupies a clear advantage in latency control and scheduling overhead, maintaining a single average response time of less than 6 ms under 250 concurrent instructions, with a normalized score of 0.94, while the commercial platforms A and B are 0.75 and 0.68, respectively, showing a bottleneck in processing threads and interrupt scheduling. In the low signal-to-noise environment, this system scores 0.91 in semantic retention stability, which is significantly higher than system C's 0.62, indicating that the deep decoupling strategy between DSP and C++ in the architecture of this system is more suitable for the robustness requirements of complex remote control scenarios. Next I will generate Figure 5 for you.
6. Practices of Technology Landing and Security Integration Mechanism
The system has been deployed in three typical environments, including a Docker-based C++ master scheduling container, an FPGA-bound DSP voice processing path, and a PCIe DMA-integrated network sandbox supporting in-vehicle Ethernet, medical WiFi, and IoT nodes. A voice interface module with self-tuning adapts to sampling rate, angular deviation, and noise model. Secure coding follows CWE/SANS Top 25, using zero-copy caching and a dual-channel sandbox with memory page locks and instruction whitelists. Red team attacks and fuzz testing confirmed resilience across command entry, memory mapping, and communication links. Optimization reduced response delay by 34% and blocked 9 types of signal injection paths.
7. Conclusions
In summary, this scheme integrates C++ master and DSP slave architecture, realizes efficient decoupling and delay compression of command response paths in voice interaction, and shows remarkable response stability and robustness in high real-time scenarios such as in-vehicle and telemedicine. Through dynamic scene modeling, frequency domain path reconstruction and semantic redundancy scheduling mechanism, a multi-dimensional collaborative speech processing system is constructed. The system introduces modular sandbox and static security coding strategy in security design to enhance the defense capability under signal injection attack. The overall performance still has room for optimization due to the thread resource scheduling bottleneck of some hardware platforms under high concurrency conditions. Future research will further explore the multi-core collaboration mechanism for heterogeneous computing architectures and strengthen the end-to-end distributed semantic reasoning capability to support a wider range of low-latency voice control requirements.
References
- Zhao, K. Research and Development of Smart Home Systems based on Voice Interaction Technology. Sci. J. Technol. 2025, 7, 107–112. [Google Scholar] [CrossRef]
- İşler, B. Urban Sound Recognition in Smart Cities Using an IoT-Fog Computing Framework and Deep Learning Models: a Performance Comparison. Appl. Sci. 2025, 15, 1201. [Google Scholar] [CrossRef]
- Fernandes, D.; Garg, S.; Nikkel, M.; et al. A gpt-powered assistant for real-time interaction with building information models. Buildings 2024, 14, 2499. [Google Scholar] [CrossRef]
- Baruzzi, V.; Indiveri, G.; Sabatini, S.P. Recurrent models of orientation selectivity enable robust early-vision processing in mixed-signal neuromorphic hardware. Nat. Commun. 2025, 16, 243. [Google Scholar] [CrossRef] [PubMed]
- Meng, Z.K.; Shi, Y.; Wu, Q.W.; et al. Voice interactive information metasurface system for simultaneous wireless information transmission and power transfer. npj Nanophotonics 2024, 1, 12. [Google Scholar] [CrossRef]
- Xue, J.; Niu, Y.; Liang, X.; et al. Unraveling the effects of voice assistant interactions on digital engagement: the moderating role of adult playfulness. Int. J. Hum. -Comput. Interact. 2024, 40, 4934–4955. [Google Scholar] [CrossRef]
- Guo, S.; Choi, M.; Kao, D.; et al. Collaborating with my doppelgänger: The effects of self-similar appearance and voice of a virtual character during a jigsaw puzzle co-solving task. Proc. ACM Comput. Graph. Interact. Tech. 2024, 7, 1–23. [Google Scholar] [CrossRef]
- Gainotti, G. Human recognition: the utilization of face, voice, name and interactions-an extended editorial. Brain Sci. 2024, 14, 345. [Google Scholar] [CrossRef] [PubMed]
- Seaborn, K.; Miyake, N.P.; Pennefather, P.; et al. Voice in human-agent interaction: a survey. ACM Comput. Surv. (CSUR) 2021, 54, 1–43. [Google Scholar] [CrossRef]
- Yefimenko, O.; Foehr, J.; Germelmann, C.C. I'll have what Alexa's having. .. but only if that's what I 'm looking for!-The impact of personalization on recommendation capabilities of smart voice-interaction technology in voice commerce. SMR-J. Serv. Manag. Res. 2023, 7, 23–38. [Google Scholar]
Figure 2.
Modeling of interference response mapping in the frequency-angle domain.
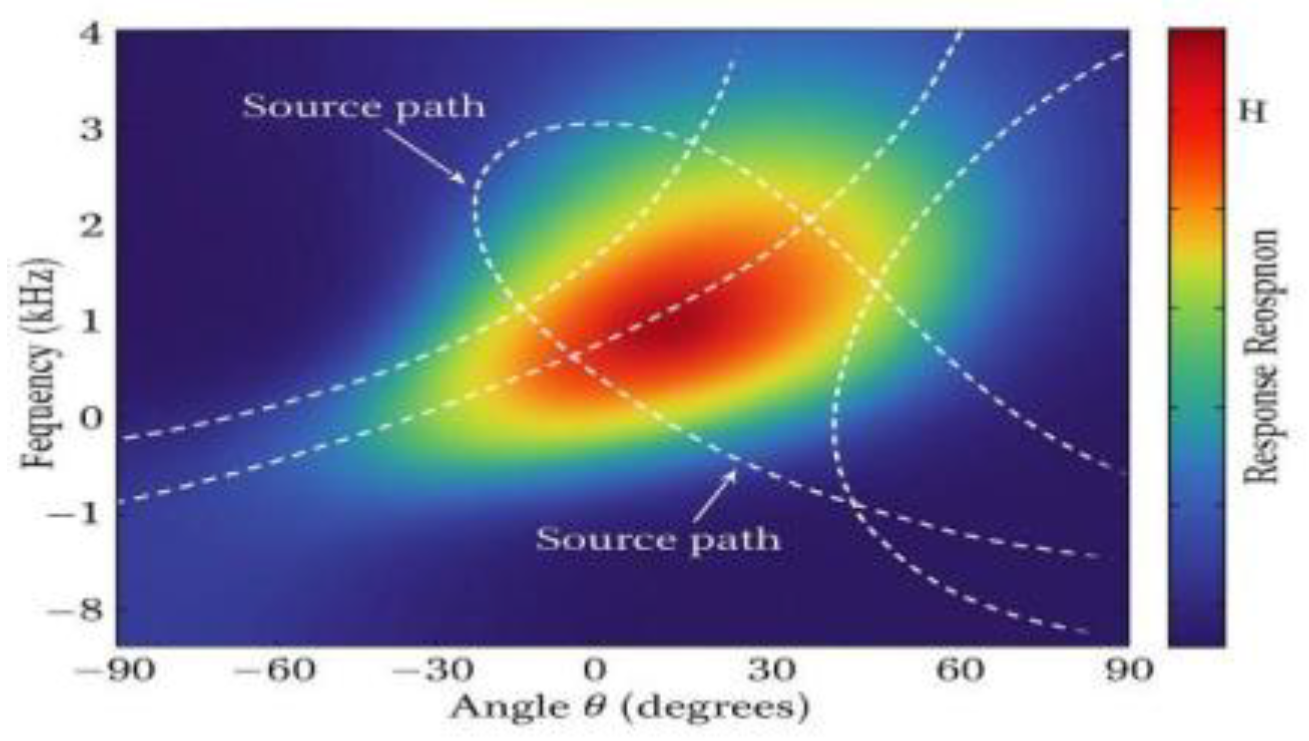
Figure 3.
Model diagram of hierarchical semantic distribution.
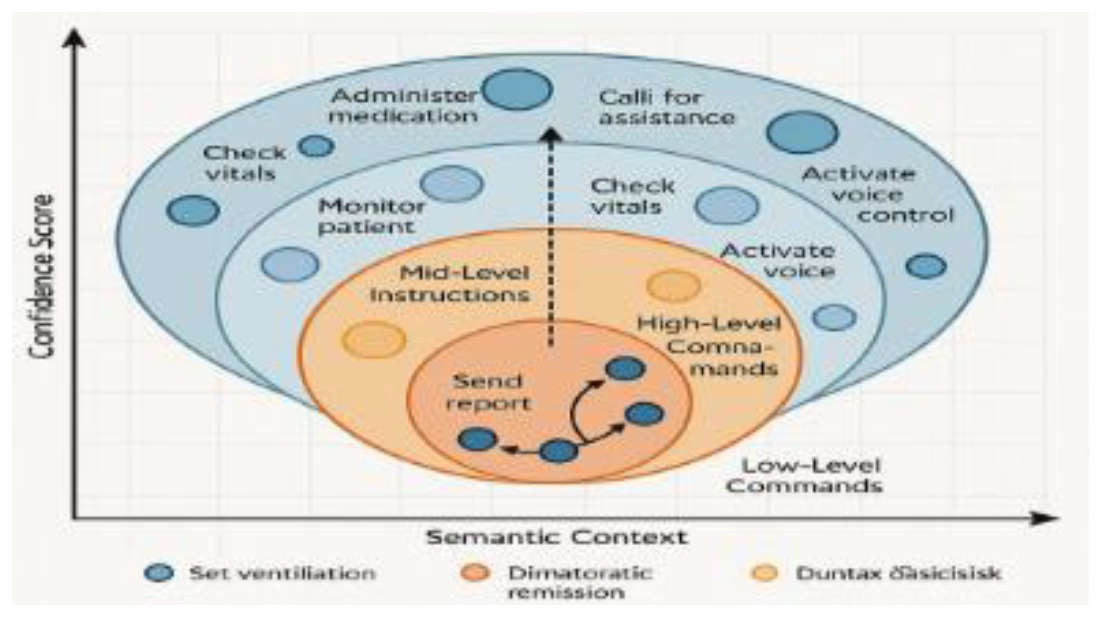
Figure 5.
Comparison between this system and mainstream voice control platforms under multi-dimensional performance indicators.
Figure 5.
Comparison between this system and mainstream voice control platforms under multi-dimensional performance indicators.
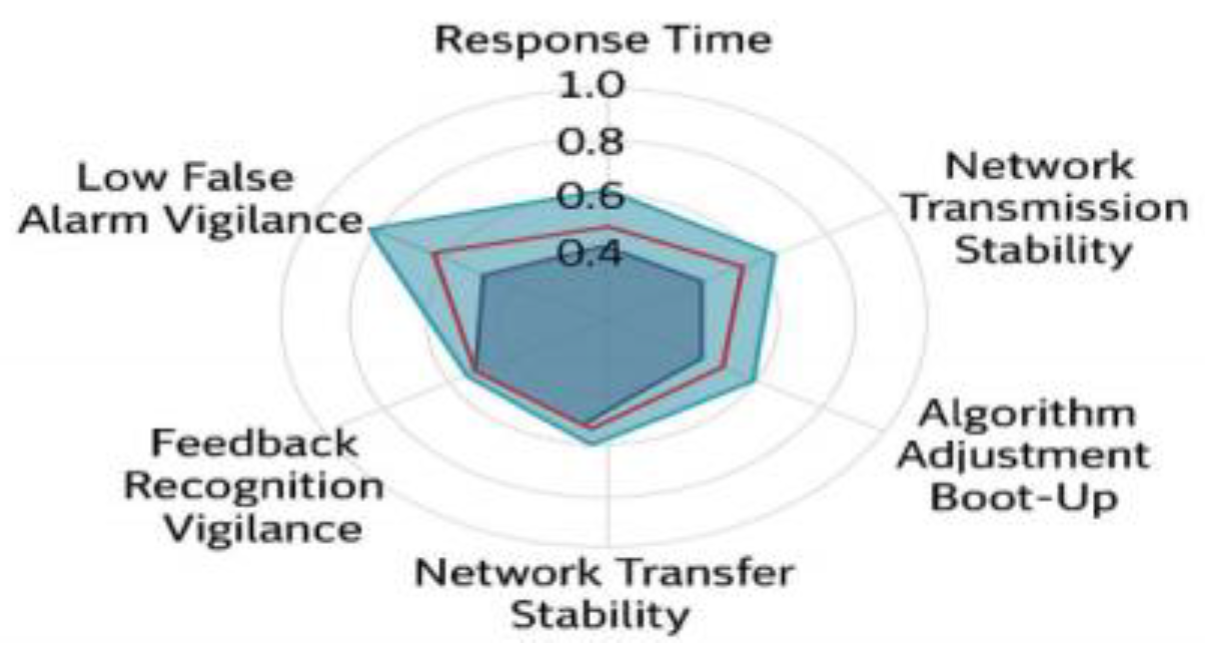
Table 1.
MIXED-SIGNAL PROCESSING ARCHITECTURE MODULE DIVISION AND INTERFACE RATE CONFIGURATION TABLE.
Table 1.
MIXED-SIGNAL PROCESSING ARCHITECTURE MODULE DIVISION AND INTERFACE RATE CONFIGURATION TABLE.
| Module name | Platform | core functionality | Data interface type |
Processing cycle (ms) |
Communication bandwidth (MB/s) |
| Speech Acquisition and Gain |
DSP | ADC Sampling, AGC | Internal I²S | 0.7 | 1.2 |
| Feature Extraction Module |
DSP | FIR filtering, MFCC, DCT operations |
DMA | 2.1 | 3.5 |
| Command Matching and Parsing |
C++ | Model inference, instruction generation |
PCIe | 3.4 | 2.7 |
| Security scheduling module |
C++ | Sandbox isolation, command forwarding |
internal bus | 1.2 | 1.1 |
Table 2.
CONFIGURATION PARAMETERS FOR HIGHLY CONCURRENT TASK SCHEDULING MECHANISMS.
| parameter term | Numerical range | default value | Functional Description |
| Maximum number of thread pools | 8-32 | 16 | Controlling the size of concurrent cores on C++ masters |
| Multi-buffered queue length | 16-64 | 32 | Instruction parsing high concurrency buffer depth |
| Mandate delay weighting factor wi | 0. 1-1.0 | 0.5 | Thread Delay Offset Adjustment Parameters in Priority Mapping |
| Maximum response time fluctuation ΔT Threshold | 2.0-10.0 ms | 4.5 ms | For triggering thread migration operations |
Table 3.
COMPOSITION OF REAL-TIME PERFORMANCE AND ROBUSTNESS EVALUATION METRICS FUNCTION TABLE.
| Assessment dimensions |
Key Function Symbols | Corresponding impact factor |
Modules involved |
Description of component relationships |
| time stability | Rs | Δtt, y t | C++ scheduling core |
Assessing the impact of transient fluctuations on dispatch response consistency |
| Frequency domain interference intensity |
D(f, θ) | S (f, t, θ), α | DSP Filter Module |
Quantitative modeling of the effect of different directional noise on signal rejection capability |
| pathway equilibrium | δp | wi , wi | Scene Modeling Module |
Measuring control load fluctuations due to multipath switching |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



