
Submitted:
11 August 2025
Posted:
12 August 2025
You are already at the latest version
Abstract
This study introduces a real-time processing framework for decoding motor imagery EEG signals by integrating manifold learning techniques with shallow classifiers. EEG recordings were obtained from six healthy participants performing five distinct wrist and hand motor imagery tasks. To address the challenges of high dimensionality and inherent nonlinearity in EEG data, five nonlinear dimensionality reduction methods—t-SNE, ISOMAP, LLE, Spectral Embedding, and MDS—were comparatively evaluated. Each method was combined with three shallow classifiers (k-NN, Naive Bayes, and SVM) to investigate performance across binary, ternary, and five-class classification settings. Among all tested configurations, the t-SNE + k-NN pairing achieved the highest accuracies, reaching 99.7\% (2-class), 99.3\% (3-class), and 89.0\% (5-class). ISOMAP and MDS also delivered competitive results, particularly in multi-class scenarios.
The presented approach builds upon our previous work involving EEG datasets from spinal cord injured (SCI) individuals, where the same manifold techniques were examined extensively. Comparative findings between healthy and SCI groups reveal consistent advantages of t-SNE and ISOMAP in preserving class separability, despite higher overall accuracies in healthy subjects due to improved signal quality. The proposed pipeline demonstrates low-latency performance, completing signal processing and classification in approximately 150 ms per trial, thereby meeting real-time requirements for responsive BCI applications. These results highlight the potential of nonlinear dimensionality reduction to enhance real-time EEG decoding, offering a low-complexity yet high-accuracy solution applicable to both healthy users and neurologically impaired individuals in neurorehabilitation and assistive technology contexts.
Keywords:
EEG
; brain-computer interface (BCI)
; manifold learning
; dimensionality reduction
; shallow classifiers
; t-SNE
1. Introduction
Every year, spinal cord injuries (SCI) affect approximately 250,000 to 500,000 individuals globally, with an estimated two to three million people living with SCI-related disabilities [44]. SCI arises from damage to the spinal cord or surrounding structures, disrupting communication between the brain and body [37]. Causes include traumatic incidents such as vehicular accidents, falls, and sports injuries, as well as non-traumatic factors. Clinical manifestations vary depending on the injury’s severity and location, commonly resulting in sensory and motor impairments, muscular weakness, and complications in physiological functions [8]. While complete injuries typically lead to permanent deficits, partial injuries may permit some functional recovery.
Technological advancements have significantly improved rehabilitation approaches and patient quality of life. Among these, brain-computer interfaces (BCIs) that leverage electroencephalography (EEG) have emerged as promising tools. EEG-based BCIs enable direct communication between the brain and external devices, offering a non-invasive, portable, and cost-effective solution for individuals with limited motor control [3,29]. EEG signals, which capture oscillatory neural activity, are acquired via electrodes placed on the scalp. These signals can be decoded in real time using machine learning algorithms to infer user intentions [6].
Despite their potential, EEG signals present analytical challenges due to their high dimensionality, low signal-to-noise ratio, and variability across sessions and subjects [50]. Effective dimensionality reduction is thus essential for improving signal decoding accuracy and computational efficiency. Traditional techniques like Principal Component Analysis (PCA) have been widely used, but recent research focuses on nonlinear methods better suited to the intrinsic geometry of EEG data [36].
Manifold learning is a powerful class of nonlinear dimensionality reduction methods that seeks low-dimensional representations while preserving local or global data structures [26,46,56]. These methods are particularly advantageous in processing EEG data due to their ability to retain discriminative features critical for classification [10]. Prominent manifold learning algorithms include ISOMAP [56], Locally Linear Embedding (LLE) [46], t-Distributed Stochastic Neighbor Embedding (t-SNE) [35], Spectral Embedding [7], and Multidimensional Scaling (MDS) [55].
In recent years, the integration of manifold learning techniques with shallow classifiers such as k-Nearest Neighbors (k-NN), Support Vector Machines (SVM), and Naive Bayes has shown promise in decoding motor imagery (MI) tasks from EEG [24,25]. These combinations enable efficient real-time EEG decoding with reduced computational burden. Moreover, comparative studies suggest that manifold learning can improve classification accuracy in EEG-based BCIs, particularly for applications in neurorehabilitation and assistive technology [31].
This study aims to explore the effectiveness of manifold learning techniques paired with shallow classifiers for classifying EEG data collected from six healthy participants performing five wrist and hand motor imagery tasks. The performance of various dimensionality reduction-classifier pairs is evaluated across binary, ternary, and five-class scenarios to identify robust, low-complexity pipelines suitable for real-time BCI applications.
1.1. State of the Art
Recent studies have highlighted the potential of manifold learning and advanced feature extraction techniques in enhancing the classification performance of EEG-based BCIs, particularly in motor imagery tasks.
Li et al. [34] introduced an adaptive feature extraction framework combining wavelet packet decomposition (WPD) and semidefinite embedding ISOMAP (SE-ISOMAP). This approach utilized subject-specific optimal wavelet packets to extract time-frequency and manifold features, achieving 100% accuracy in binary classification tasks and significantly outperforming conventional dimensionality reduction methods.
Yamamoto et al. [70] proposed a novel method called Riemann Spectral Clustering (RiSC), which maps EEG covariance matrices as graphs on the Riemannian manifold using a geodesic-based similarity measure. They further extended this framework with odenRiSC for outlier detection and mcRiSC for multimodal classification, where mcRiSC reached 73.1% accuracy and outperformed standard single-modal classifiers in heterogeneous datasets.
Krivov and Belyaev [28] incorporated Riemannian geometry and Isomap to reveal the manifold structure of EEG covariance matrices in a low-dimensional space. Their method, evaluated with Linear Discriminant Analysis (LDA), reported classification accuracies of 0.58 (CSP), 0.61 (PGA), and 0.58 (Isomap) in a four-class task, underlining the potential of manifold methods in representing EEG data structures.
Tyagi and Nehra [57] compared LDA, PCA, FA, MDS, and ISOMAP for motor imagery feature extraction using BCI Competition IV datasets. A feedforward artificial neural network (ANN) trained with the Levenberg-Marquardt algorithm yielded the lowest mean square error (MSE) with LDA (0.1143), followed by ISOMAP (0.2156), while other linear methods showed relatively higher errors.
Xu et al. [64] designed an EEG-based attention classification method utilizing Riemannian manifold representation of symmetric positive definite (SPD) matrices. By integrating amplitude and phase information using a filter bank and applying SVM, their approach reached a classification accuracy of 88.06% in a binary scenario without requiring spatial filters.
Lee et al. [32] assessed the efficacy of PCA, LLE, and ISOMAP in binary EEG classification using LDA. The classification errors were reported as 28.4% for PCA, 25.8% for LLE, and 27.7% for ISOMAP, suggesting LLE’s slight edge in capturing intrinsic EEG data structures.
Li, Luo, and Yang [33] further evaluated the performance of linear and nonlinear dimensionality reduction techniques in motor imagery EEG classification. Nonlinear methods such as LLE (91.4%) and parametric t-SNE (94.1%) outperformed PCA (70.7%) and MDS (75.7%), demonstrating the importance of preserving local neighborhood structures for robust feature representation.
Sayılgan [51] investigated EEG-based classification of imagined hand movements in spinal cord injury patients using Independent Component Analysis (ICA) for feature extraction and machine learning classifiers including SVM, k-NN, AdaBoost, and Decision Trees. The highest accuracy was achieved with SVM (90.24%), while k-NN demonstrated the lowest processing time, with the lateral grasp showing the highest classification accuracy among motor tasks.
These studies collectively underline the critical role of dimensionality reduction, particularly manifold learning, in effectively decoding motor intentions from EEG data, thereby improving the performance and applicability of BCI systems in neurorehabilitation contexts.
1.2. Contributions
Electroencephalographic (EEG) recordings, collected from multiple scalp locations, are inherently high-dimensional, often containing redundant information and being susceptible to various noise sources and artifacts. Such properties can hinder the accuracy and robustness of motor intention decoding in Brain–Computer Interface (BCI) systems. While conventional linear dimensionality reduction approaches, such as Principal Component Analysis (PCA) and Linear Discriminant Analysis (LDA), are widely used, they are often inadequate for capturing the complex, nonlinear temporal–spatial relationships embedded in EEG activity patterns. In contrast, manifold learning techniques offer a promising alternative by projecting data into a lower-dimensional space while preserving its intrinsic local geometry.
In this work, we present a comprehensive and adaptable manifold learning-based processing framework for EEG analysis, designed to support the development of rehabilitation-oriented BCIs. The proposed pipeline integrates multiple nonlinear dimensionality reduction algorithms with shallow classifiers to alleviate overfitting, enhance inter-class separability, and improve overall decoding performance.
The main contributions of this study can be outlined as follows:
- Introduction of a unified manifold learning framework for the classification of motor imagery EEG signals into binary (2-class), ternary (3-class), and multi-class (5-class) categories, using real-time data acquired from healthy participants.
- Systematic comparison of five widely recognized manifold learning algorithms: Spectral Embedding, Locally Linear Embedding (LLE), Multidimensional Scaling (MDS), Isometric Mapping (ISOMAP), and t-distributed Stochastic Neighbor Embedding (t-SNE) for their effectiveness as feature transformation tools in motor intent recognition.
- Alignment of the proposed methodology with practical rehabilitation needs, specifically for integration into a cost-efficient, 2-degree-of-freedom robotic platform employing a straightforward control strategy.
- Emphasis on building a sustainable machine learning model capable of accurately detecting motor intentions in healthy users while ensuring high classification performance, thereby enabling scalability to clinical scenarios.
- Addressing a notable gap in the literature by exploring high-accuracy 3-class and 5-class EEG-based BCI paradigms for spinal cord injury (SCI) rehabilitation, and benchmarking binary classification results against state-of-the-art systems.
- Analysis of task combination compatibility across different classification schemes, with performance metrics aggregated over all participants to support model generalizability.
- Comprehensive evaluation using multiple performance indicators—accuracy, precision, recall, and F1-score to assess the robustness of each manifold–classifier pairing under varying task complexities.
2. Materials and Methods
2.1. EEG Experimental Procedure
In this study, real-time EEG signals were recorded from six healthy participants (see Table 1) using the OpenBCI “All-in-One EEG Electrode Cap Bundle”. The system includes the Cyton+Daisy biosensor boards, a 19-channel electrode cap with Ag/AgCl-coated electrodes, a USB wireless dongle, a 6V AA battery pack, a Head Pin Touch Adapter (HPTA), electrode gel, and associated accessories. The Cyton board offers 8 channels of EEG data acquisition, which is extended to 16 channels using the Daisy module, operating at a sampling rate of 250 Hz per channel [39].
Before the experiment, the electrode cap was positioned on the participant’s head according to the 10–20 international placement system. Electrode gel was applied to each electrode location using a syringe to ensure optimal conductivity. The cap’s electrodes were then connected to the input pins of the Cyton and Daisy boards, which were wirelessly linked to the recording computer via the OpenBCI USB dongle. Figure 1 illustrates the setup procedure.
The experimental paradigm was implemented using a custom interface developed in Unity (Figure 2. After the participant’s information was entered and a specific hand movement class was selected (Figure 3 [38], the experiment began with a predefined sequence of visual stimuli. The protocol consisted of five repetitions per class, with a 3-second start delay, a 5-second stimulus duration (fixation cross), followed by a 3-second rest period. Each trial concluded with a 3-second post-stimulus delay.
During each trial, participants were instructed to perform motor imagery of the displayed hand movement (e.g., left hand open, right hand grasp) while minimizing physical motion. The experimental flow involved an initial blank screen, followed by the appearance of a fixation cross, a rest interval, and finally the visual cue corresponding to the intended movement (Figure 4). Upon completion of all repetitions, a message indicating the end of the experiment was displayed.
The EEG recording process was initiated simultaneously with the start of the experiment via the OpenBCI GUI, allowing synchronized signal acquisition and stimulus presentation. The paradigm is aligned with standard motor imagery-based BCI protocols, where subjects are encouraged to mentally rehearse the movement in the absence of actual execution, which has been shown to activate relevant cortical motor areas [43,60].
2.2. EEG Dataset Description
Following the experimental procedure described in the previous section, EEG signals were recorded using the OpenBCI system and saved in .txt format on a local computer. These files were subsequently imported into MATLAB for preprocessing. The raw text files were cleaned to extract only the EEG channels and time segments corresponding to motor imagery tasks.
The active task intervals were identified as the 9–13th, 25–29th, 41–45th, 57–61th, and 73–77th seconds of each trial. These segments were isolated for each participant and saved in .csv format for further processing. Each signal was then normalized using z-score normalization, a widely adopted technique in EEG signal preprocessing [?]. The formula is defined as follows:
where X denotes an individual EEG data point, represents the mean of the EEG channel, and is the standard deviation of the same channel.
Following normalization, all 2-, 3-, and 5-class motor imagery task combinations were constructed, and performance was evaluated using a machine learning pipeline implemented in the Orange Data Mining platform, Figure 5 [15].
Dimensionality reduction and classification steps were executed with predefined hyperparameters, as outlined below.
Manifold Learning Algorithms:
- Multi-Dimensional Scaling (MDS): Maximum iterations set to 300, initialized using PCA.
- Isometric Mapping (ISOMAP): Neighborhood size of 5 [56].
- Local Linear Embedding (LLE): Standard LLE method with 10 neighbors and a maximum of 100 iterations [46].
- t-Distributed Stochastic Neighbor Embedding (t-SNE): Parameters include Euclidean metric, perplexity of 30, early exaggeration of 8, learning rate of 20, maximum of 1000 iterations, and PCA initialization [35].
- Spectral Embedding: Affinity set to “nearest neighbors” as recommended in [7].
All manifold learning algorithms were configured to reduce the original EEG signal features into a 3-dimensional subspace to facilitate visualization and efficient classification.
Classification Algorithms:
- k-Nearest Neighbors (k-NN): Configured with , using the Euclidean distance metric and uniform weighting.
- Support Vector Machine (SVM): Configured with a cost parameter , epsilon = 0.10, and radial basis function (RBF) kernel; numerical tolerance was set to , with a maximum of 100 iterations [11].
- Naïve Bayes: Implemented based on Bayes’ Theorem, assuming conditional independence among features [61].
This comprehensive pipeline enabled the systematic evaluation of different manifold learning and classification methods for EEG-based motor intention decoding tasks in healthy individuals.
2.3. EEG Preprocessing Steps
The raw EEG signals acquired through the OpenBCI GUI platform were initially subjected to preprocessing operations within the same platform. A band-pass filter was applied to retain frequencies within a specified range, allowing only signals between 5.0 Hz and 50.0 Hz to pass. This frequency window effectively preserves relevant neural oscillations typically associated with motor tasks, including the mu (8–13 Hz), beta (13–30 Hz), and low gamma (30–50 Hz) bands, while attenuating lower-frequency drifts and high-frequency noise.
Subsequently, a notch filter was employed to suppress power line interference typically observed around 50 Hz to 60 Hz, thereby improving signal fidelity. A fourth-order Butterworth filter was selected as the filter type due to its advantageous characteristics, including minimal phase distortion, smooth frequency response, and flat passband behavior. The choice of a fourth-order filter ensures adequate sharpness in the transition band while maintaining the integrity of the EEG signal structure, which is crucial for subsequent feature extraction and classification tasks [38,50].
2.4. Manifold Learning Methods
2.4.1. Multi-Dimensional Scaling (MDS)
Multi-Dimensional Scaling (MDS) is a non-linear, unsupervised dimensionality reduction technique that represents the pairwise dissimilarities between high-dimensional data points in a lower-dimensional space while preserving their relative distances [1]. MDS is commonly employed in exploratory and multivariate data analysis and has gained considerable attention in recent years [47]. There are three main variants of MDS: classical, metric, and non-metric, each suited to different types of dissimilarity data and analysis objectives [53].
In classical MDS, the pairwise distances between samples in the input data matrix are computed using the Euclidean distance metric, which is most appropriate for quantitative data. The Euclidean distance between two data points and in a high-dimensional space is calculated as:
The classical MDS algorithm consists of two primary matrices: the squared distance matrix and the centering matrix . The matrix contains squared Euclidean distances, while is defined as:
where is the identity matrix and is a column vector of ones. The double-centered matrix , which serves as the basis for eigen decomposition, is calculated as:
The final step involves the eigenvalue decomposition of the matrix , yielding a set of eigenvalues and eigenvectors. The coordinates in the reduced-dimensional space are then obtained by:
where is the matrix of eigenvectors and is the diagonal matrix of eigenvalues. This transformation allows the high-dimensional data to be embedded into a low-dimensional space that preserves the original pairwise distances as closely as possible [66].
2.4.2. Isometric Feature Mapping (ISOMAP)
Isometric Feature Mapping (ISOMAP) is a non-linear dimensionality reduction technique that extends classical Multi-Dimensional Scaling (MDS) by incorporating geodesic distances rather than Euclidean distances. In contrast to linear methods, ISOMAP is designed to reveal the intrinsic geometry of high-dimensional data lying on a non-linear manifold by approximating the true geodesic distances between all pairs of points [19,20,56].
The algorithm operates through three main steps:
Step 1: Construction of the Neighborhood Graph
A neighborhood graph is constructed to represent local relationships among data points. This can be achieved using either the -neighborhood criterion, where each point is connected to all others within a fixed radius , or the k-nearest neighbors (k-NN) approach, where each point is connected to its k closest neighbors. The resulting graph is weighted, with edges reflecting Euclidean distances between neighboring points, denoted as . This graph approximates the local structure of the underlying manifold [56].
Step 2: Estimation of Geodesic Distances
In manifold learning, the shortest path between two points is measured along the curved surface of the manifold, referred to as the geodesic distance. ISOMAP approximates these distances by computing the shortest path through the neighborhood graph using algorithms such as Dijkstra’s or Floyd-Warshall. This results in a geodesic distance matrix , which approximates the pairwise intrinsic distances between all data points [9].
Step 3: Application of Classical MDS
Once the geodesic distance matrix is computed, classical MDS is applied to this matrix to generate a low-dimensional embedding. The goal is to find a mapping that best preserves the pairwise geodesic distances in the reduced space. This step involves double-centering of the matrix and eigenvalue decomposition, similar to classical MDS, but using instead of Euclidean distances [20,65].
ISOMAP thus enables the unfolding of complex manifolds by preserving global geometric structures and providing a meaningful low-dimensional representation suitable for classification, visualization, or further analysis.
2.4.3. Local Linear Embedding (LLE)
The Locally Linear Embedding (LLE) is recognized as an unsupervised learning algorithm through which a low-dimensional embedding of high-dimensional inputs is computed, with neighborhood relationships being preserved [40].
In contrast to clustering techniques that are employed to reduce the dimensionality of local data, LLE effectively transforms its inputs into a singular global coordinate system that possesses a lower dimensionality. Furthermore, the optimization processes of LLE are not subject to local minimum. LLE’s employment of local symmetries inherent in linear reconstructions facilitates the acquisition of knowledge concerning the overall structure of nonlinear manifolds. This capability is particularly pronounced in scenarios where these manifolds are derived from facial images or textual documents [49].
LLE endeavors to preserve the local affine structure. Under the assumption that each data point lies within a manifold’s locally linear patch, LLE characterizes the local geometry by representing each data point as an approximate affine combination of its neighboring points. After this process, LLE accomplishes a reduction in dimension through the construction of a scatter of points in low dimensions, ensuring the optimal maintenance of the affine combination coefficients obtained from the high-dimensional data space [2].
It is required to find the k-NN for each data point xi in the data set. This particular process is founded on the assumption that a small linear segment on a larger manifold is formed collectively by these data points. In the context of these local segments, it is possible to establish linear coefficients that facilitate the reconstruction of each observation based on its neighboring observations. The accuracy of the reconstructed data can be determined by calculating the total squared dissimilarity between each data point and the reconstruction based on that point. In addition, the weight matrix W can be determined by minimizing the sequence error.
The process involves the computation of the squared distances between all data points and their respective reconstructions. The contribution of each data point to the reconstruction of the corresponding point is represented by the assigned weights. The calculation of the weights Wij is done by minimizing the cost function, subject to two restrictions. The first constraint specifies that each data point Xi is reconstructed exclusively from its neighbors, thereby forcing:
if Xj does not belong to this set. The index "j" in the equation indicates the data points that are located within the k-nearest neighbors of the data point Xi, where the optimal weights in the error function are obtained using the least squares method under the constraint that the sum of the rows of the weight matrix equals one:
In the final phase of the algorithm, each high-dimensional observation, denoted Xi, is mapped to a low-dimensional vector denoted Yi, which denotes global internal coordinates on the manifold. This process is achieved by selecting d-dimensional coordinates, denoted as Yi, to minimize the embedding cost function, thereby ensuring the optimal representation of the data.
The sparse eigenvalue-eigenvector approach is a viable method to solve the minimization problem. The procedure for obtaining a symmetric and semi-positive NxN-dimensional sparse matrix for eigenvalue decomposition is described in equation form.
Independent coordinates centered at the origin are provided by the eigenvectors associated with the smallest non-zero eigenvalue M of the d-matrix. In summary for the LLE; 1) The determination of k for the neighborhood, as well as the number of dimensions d in the reduced coordinate system, is required. Then the neighbors of each data point Xi are calculated based on the selected k. 2) The weights Wij, which represent the contribution of each data point Xi to its nearest neighbors, are calculated by reconstructing Xi as a linear combination of its neighbors. These weights are calculated by minimizing the cost function through constrained linear optimization to ensure the most accurate representation of Xi in its local neighborhood. 3) The points Yi are constructed in reduced d-dimensional space to ensure that the weights Wij remain consistent. This is achieved by computing the vectors Yi that can best be reconstructed by Wij, minimizing the quadratic form in the equation using the smallest non-zero eigenvectors [21,49,66].
2.4.4. Local Linear Embedding (LLE)
Local Linear Embedding (LLE) is an unsupervised manifold learning algorithm that aims to compute a low-dimensional embedding of high-dimensional data while preserving local neighborhood relationships [40]. Unlike clustering-based dimensionality reduction methods, LLE constructs a single global coordinate system by aligning locally linear patches of the data manifold. One of its advantages is that it does not suffer from the problem of local minima, as the optimization is performed via eigen-decomposition [49].
LLE assumes that each data point lies on or near a locally linear patch of the manifold and can be reconstructed as a linear combination of its nearest neighbors. The process involves three primary steps:
Step 1: Determination of Nearest Neighbors
For each data point , its k-nearest neighbors are identified based on Euclidean distance. This step assumes that the local geometry around each point can be approximated as a linear subspace [2].
Step 2: Computation of Reconstruction Weights
Each data point is then reconstructed from its neighbors by minimizing the cost function:
subject to the constraints:
where denotes the set of k-nearest neighbors of . The optimal weights are found using constrained least squares optimization.
Step 3: Computation of Low-Dimensional Embedding
The final step involves finding low-dimensional representations that best preserve the reconstruction weights by minimizing the following embedding cost function:
This minimization leads to an eigenvalue problem involving the matrix:
The embedding coordinates are obtained from the eigenvectors corresponding to the smallest non-zero eigenvalues of M. These vectors represent independent coordinates centered at the origin and define the global internal structure of the data manifold in [20,66].
LLE has shown strong performance, particularly in applications involving image and text data, where preserving the local structure of high-dimensional information is crucial [49].
2.4.5. t-Distributed Stochastic Neighbor Embedding (t-SNE)
t-Distributed Stochastic Neighbor Embedding (t-SNE) is a nonlinear, unsupervised dimensionality reduction technique introduced by Laurens van der Maaten and Geoffrey Hinton in 2008. It has been widely employed for the visualization and exploration of high-dimensional data, particularly due to its ability to preserve local neighborhood structures when projecting data into a lower-dimensional space [68?].
t-SNE minimizes the Kullback-Leibler (KL) divergence between two probability distributions: one that measures pairwise similarities of data points in the high-dimensional space and another that measures pairwise similarities in the low-dimensional embedding. This cost function is non-convex, and therefore, different initializations may lead to different solutions. Nonetheless, t-SNE is particularly effective at revealing clusters and complex data structures at multiple scales [42].
The algorithm operates in three main steps:
Step 1: Compute High-Dimensional Similarities
A Gaussian distribution centered at each data point is used to model pairwise similarities in the high-dimensional space. The conditional probability indicates the likelihood that point would be a neighbor of :
To obtain a symmetric joint probability, the following is computed:
where N is the total number of data points.
Step 2: Compute Low-Dimensional Similarities
In the low-dimensional space, the similarity between points and is modeled using a heavy-tailed Student’s t-distribution with one degree of freedom:
Step 3: Minimize the Cost Function
The divergence between high- and low-dimensional similarity distributions is quantified using the KL divergence:
This cost is minimized using gradient descent, with updates given by:
Summary
- High-dimensional similarities are modeled using Gaussian distributions.
- Low-dimensional similarities are captured using a Student’s t-distribution.
- The KL divergence is minimized to produce a faithful low-dimensional embedding that retains local structure.
2.5. Spectral Embedding
Spectral embedding is a nonlinear dimensionality reduction technique that leverages the principles of spectral graph theory. It uses the eigenvectors and eigenvalues of matrices derived from data similarity graphs to project high-dimensional data into a lower-dimensional space while preserving essential structural relationships [63,71].
This technique assumes that the data lie on a low-dimensional manifold embedded within a high-dimensional space. Spectral embedding algorithms, therefore, aim to reveal the intrinsic geometry of this manifold by constructing a graph of data points and analyzing its spectral properties.
In data classification problems, each temporal segment is treated as an individual data instance. Let denote the vector of Fourier coefficients associated with the time segment, where m is the total number of coefficients. Since many coefficients may carry redundant or insignificant information, cosine distance is chosen as the dissimilarity metric due to its robustness against small-magnitude variations:
Here, denotes the cosine distance between points and , and the distance matrix D is computed from all pairwise distances.
A Gaussian similarity function is applied to transform the distances into affinity scores:
where is defined as the distance to the nearest neighbor of point i, promoting adaptive local scaling.
To create a sparse affinity matrix S, only the top N similarities for each data point are preserved, and all other values are set to zero. A diagonal degree matrix D is then computed as:
Using these matrices, the normalized graph Laplacian is constructed:
The eigenvectors corresponding to the smallest non-zero eigenvalues of form the low-dimensional embedding of the data. This procedure enables the mapping of complex, high-dimensional structures into a simplified representation while maintaining locality and manifold topology [54].
3. Classifiers
3.1. Support Vector Machine (SVM)
Support Vector Machine (SVM) is a supervised learning algorithm introduced by Vapnik [59], and it has demonstrated strong performance in various real-world classification problems, including Brain-Computer Interface (BCI) applications [24,66]. SVM aims to find an optimal hyperplane that maximally separates data points of different classes in a high-dimensional space, thereby minimizing generalization error.
Step 1: Fundamental Concepts of SVM
SVM identifies a hyperplane to separate two classes ( and ):
where:
- is the weight vector normal to the hyperplane,
- is the bias,
- is the input data point.
To ensure correct classification, the condition below must hold:
Step 2: Optimization Problem
The margin is maximized by minimizing , leading to the following convex optimization problem:
Step 3: Lagrange Multipliers and Dual Form
Using Lagrange multipliers , the dual problem becomes:
The optimal weight vector is:
Step 4: Kernel and Soft Margin
This study employs the Radial Basis Function (RBF) kernel:
To handle overlapping classes, slack variables are introduced:
3.2. k-Nearest Neighbors (k-NN)
The k-Nearest Neighbor (k-NN) is a non-parametric, supervised learning algorithm that classifies data points based on the majority vote of their k closest neighbors [12]. It is widely used due to its simplicity and effectiveness, particularly in multi-class problems.
The core idea is to assign a class to a new observation by evaluating the distance to k training samples. The most common metric is Euclidean distance, defined as:
3.3. Naive Bayes
Naive Bayes is a probabilistic classifier grounded in Bayes’ theorem. It assumes strong (naive) independence between features given the class label. Despite this often unrealistic assumption, Naive Bayes classifiers have demonstrated competitive performance in various practical applications due to their simplicity, efficiency, and robustness [61].
Step 1: Bayes’ Theorem
The core of the Naive Bayes classifier is Bayes’ theorem, which expresses the posterior probability of a class y given a feature vector :
where:
- is the posterior probability of class y given features x,
- is the prior probability of class y,
- is the likelihood of features x given class y,
- is the evidence or marginal likelihood of observing x (often omitted in classification as it is constant across classes).
Step 2: Conditional Independence Assumption
The fundamental assumption of Naive Bayes is that the features are conditionally independent given the class label y:
This simplifies the computation of the posterior as:
Step 3: Classification Decision
The final prediction is made by selecting the class y that maximizes the posterior probability:
Advantages and Use Cases
Naive Bayes classifiers are particularly effective when the dimensionality of the input data is high, such as in text classification, spam detection, and real-time applications. Their computational efficiency and ease of implementation make them suitable for initial baseline models and large-scale systems where interpretability and speed are essential [61].
3.4. Evaluation of Manifold Learning Algorithms Performance
In this study, the performance evaluation of manifold learning algorithms was conducted using stratified k-fold cross-validation with . In this procedure, the dataset is partitioned into five equal subsets while preserving the class distribution. During each iteration, one subset is reserved as the test set, and the remaining four subsets are used for training. This process is repeated five times, and the final performance is computed as the average of the individual results. The use of stratified sampling ensures that the class balance is maintained in each fold, thereby yielding a more realistic and robust estimation of model performance.
To assess the efficacy of the manifold learning algorithms, standard evaluation metrics were employed, including Area Under the Curve (AUC), Classification Accuracy (CA), F1-Score, and Precision. These metrics offer complementary insights into the classification model’s effectiveness, especially in the context of binary classification problems.
In binary classification, each instance is assigned to one of two classes: positive or negative. The outcomes of a classifier can be summarized in a confusion matrix, which categorizes predictions as follows:
- True Positives (TP): Correctly predicted positive instances.
- False Positives (FP): Incorrectly predicted as positive when they are negative.
- True Negatives (TN): Correctly predicted negative instances.
- False Negatives (FN): Incorrectly predicted as negative when they are positive.
This framework facilitates a comprehensive understanding of the model’s predictive capabilities [14,45].
3.4.1. Area Under the Curve (AUC)
The Area Under the Receiver Operating Characteristic (ROC) Curve, abbreviated as AUC, is a widely used metric that quantifies the classifier’s ability to distinguish between classes. The ROC curve plots the True Positive Rate (TPR) against the False Positive Rate (FPR) at various threshold settings. A higher AUC value indicates better overall classification performance.
The TPR (or sensitivity) and the True Negative Rate (TNR or specificity) are calculated as:
3.4.2. Classification Accuracy (CA)
Classification Accuracy (CA) measures the proportion of correctly predicted instances (both positive and negative) over the total number of samples:
3.4.3. F1 Score
The F1-score is the harmonic mean of precision and recall and is especially useful when dealing with class imbalance. It is defined as:
3.4.4. Precision
Precision is defined as the proportion of true positives among all instances classified as positive:
It evaluates the classifier’s exactness and is crucial when the cost of false positives is high [45].
4. Results
As a result of the real-time data processing process, the binary, 3- and 5-classification results of manifold learning methods and classification algorithms are presented in the tables below according to their performance metrics. In this study, AUC, CA (Accuracy), F1 score, and precision were preferred as evaluation criteria. High values obtained in the relevant metrics show that the classification success of the model is high.
According to the results shown in Table 2, the most effective classification method in the ISOMAP method is k-NN. The values of AUC, CA, F1 score, and precision are between 0.995 and 0.993, indicating that the combination of ISOMAP and k-NN is quite successful. As the number of classes increases, the performances of all classifiers decrease, but this is expected. Naive Bayes shows the best performance after k-NN. However, a serious decrease is seen in the 5-class case. SVM is the model with the lowest performance in all classes.
Table 3 compares the performance of the classification algorithms (SVM, k-NN, Naive Bayes) applied after dimensionality reduction with the Local Linear Embedding (LLE) method in 2, 3, and 5-class classifications through AUC, CA, F1, and Precision metrics. k-NN is the model with the highest metric value in all classes (2-, 3-, 5-). According to the metrics, k-NN is between 0.963-0.815 values. SVM is the model with the lowest performance. According to the SVM results, some values remained around or below 0.5. This shows that the model has weak discrimination power between classes. Naive Bayes method is the method with the best results after k-NN.
Table 4 shows the performances of the classification algorithms (SVM, k-NN, Naive Bayes) with Spectral Embedding method in 2-, 3- and 5-class classifications. k-NN showed the highest performance in all metrics, staying between 0.960-0.721. Although SVM gave a very high AUC (0.960) value, especially in the 3-class case, it showed low performance in other metrics. Naive Bayes gave worse results than k-NN but better than SVM. Although SVM reached the highest value in AUC with 0.960 in 3-class values, it failed in other metrics (CA = 0.391, F1 = 0.365). This shows that the model cannot provide balance while trying to distinguish the classes.
An examination of the results presented in Table 5 reveals that k-NN emerged as the most successful model, achieving the highest values (0.999–0.890) across all metrics, when compared to t-SNE. The SVM model demonstrates superior performance in this table in comparison to other methods, particularly in the 2- and 3-class problems. The AUC value of SVM is 0.950–0.954 in the 2- and 3-class problems, indicating high distinguishability between classes. The observation that the precision and F1 scores are high and close to each other indicates that there are no unbalanced predictions between classes and that the model maintains its general balance.
However, it is observed that the performance of SVM declines considerably in the 5-class problem. The decline of the Area Under the Curve (AUC) to 0.619 indicates a reduction in the capacity to differentiate between the designated classes. The CA, F1 score, and precision values are all low, at approximately 33%, suggesting that random predictions were made from five classes. SVM was inadequate in more complex and multi-class scenarios. This finding suggests that the high-dimensional discrimination capacity of SVM may be impaired after t-SNE.
Naive Bayes demonstrated average performance in the 2-class problem. An AUC of approximately 0.795 suggests that, while its capacity to differentiate between classes is marginally superior to random guessing, it is not significantly superior. The CA and F1 values ranging from 0.728 to 0.730 suggest the presence of errors in classification, yet the model demonstrates the capacity to discern certain patterns. In the 3-class problem, the performance of Naive Bayes has decreased significantly. While the AUC value (0.768) remains at a moderate level, CA (0.590), precision (0.589), and F1 score (0.586) have all shown significant decline. This decline can be attributed to the assumption of unconditional independence between classes, which may not be adequate for complex, structured data.
In the 5-class problem, the CA, F1, and precision values are below 40%, indicating a weak model success. The AUC value (0.733) is relatively high, but this does not guarantee that the model can reliably differentiate between the classes. It is important to note that if the dataset is imbalanced, the AUC value may be elevated while the F1 score may decline.

Table 6.
MDS-Based Classification Results Across 2-, 3- and 5-Class
| 2-class | 3-class | 5-class | ||||||||||
| AUC | CA | F1 | Prec | AUC | CA | F1 | Prec | AUC | CA | F1 | Prec | |
| SVM | 0.772 | 0.738 | 0.740 | 0.742 | 0.754 | 0.556 | 0.549 | 0.569 | 0.709 | 0.367 | 0.361 | 0.380 |
| k-NN | 0.974 | 0.971 | 0.971 | 0.969 | 0.976 | 0.943 | 0.943 | 0.928 | 0.971 | 0.884 | 0.819 | 0.835 |
| Naive Bayes | 0.768 | 0.727 | 0.727 | 0.728 | 0.737 | 0.565 | 0.559 | 0.562 | 0.712 | 0.404 | 0.384 | 0.396 |
In the classification analyses performed after the MDS-based dimensionality reduction method, the k-NN algorithm demonstrated the highest level of success in all class combinations (2-, 3-, and 5-class). The values obtained in AUC, accuracy (CA), F1 score and precision metrics reveal that the k-NN model is superior in terms of both discrimination power and prediction balance. Conversely, the SVM model exhibited moderate performance for 2-class problems, but as the number of classes increased, a substantial decline in performance was observed. The Naive Bayes model demonstrated inferior performance in comparison to the k-NN model across all class combinations, failing to exhibit adequate performance within the context of this particular data set and dimensionality reduction method. These findings show that the most appropriate classification algorithm after MDS is k-NN and that SVM and Naive Bayes need to be carefully evaluated for complex multi-class problems. In the classifications made with MDS method, the performance of SVM, Naive Bayes, and k NN models changed according to the number of classes. In the two-class case, SVM gave better results than Naive Bayes, while k-NN outperformed all three models. While SVM and Naive Bayes showed similar performance in three classes, k-NN again provided the highest accuracy and balance. In the 5-class scenario, the success of SVM decreased significantly, and Naive Bayes produced more balanced results. However, k NN was by far the most successful model even in this complex case. These results show that k-NN is a stable and powerful model in every class structure, SVM is successful in simpler tasks and Naive Bayes offers limited but balanced performance for complex structures.
When Figure 6, Figure 7 and Figure 8, which are comparatively presented after the dimensionality reduction methods (ISOMAP, LLE, Spectral Embedding, t-SNE and MDS) applied on the dataset, are examined, it is seen that the highest performance belongs to the k-NN algorithm in all classification scenarios. Especially in binary classification (Figure 6), k-NN achieved 99.6% accuracy with t-SNE, 98.4% with ISOMAP and 97.1% with MDS, demonstrating a significantly superior success compared to the other two models (SVM and Naive Bayes). SVM gave a partially competitive result with 94.3% accuracy with t-SNE in this scenario, while Naive Bayes generally remained in the range of 72–76%.
In Figure 7, which includes three-class classification results, k-NN again stands out as the most successful model in all dimensionality reduction methods. Reaching 99.3% accuracy with t-SNE, 96.6% with ISOMAP and 94.3% with MDS, k-NN largely maintained its performance despite the increase in the number of classes. SVM achieved a competitive result of 91.2% only with t-SNE, while its accuracy remained below 50% for other methods. Naive Bayes provided moderate results in the range of 56–61% with methods such as LLE and MDS, but the difference with k-NN remained significant.
In the most complex classification structure with five classes (Figure 8), although a general decrease in model performance was observed, k-NN maintained consistently high accuracy rates. Providing 93.3% accuracy with ISOMAP, 81.6% with LLE and 89.0% with t-SNE, k-NN produced quite effective results compared to other models despite the difficulty brought by multi-class structures. On the other hand, SVM was inadequate in the classification task with low accuracy rates (23–40%) in all methods, while Naive Bayes produced partially more balanced results (34–46%) but still lagged behind k-NN.
All these findings reveal that the k-NN algorithm, especially when used with t-SNE and ISOMAP dimensionality reduction methods, exhibited superior performance by providing the highest accuracy rates at both low and high class numbers. While SVM produced effective results with t-SNE only in binary classification, it experienced a serious decreases in its performance as the number of classes increased. Naive Bayes, on the other hand, achieved more balanced but generally moderate accuracies and although it behaved more stably in multi-class scenarios, it could not provide sufficient performance for applications requiring high accuracy.
Table 7.
Classification Accuracy of ISOMAP for 2-Class Combinations
| ISOMAP | |||
| SVM | k-NN | Naive Bayes | |
| Hand O.-Lateral G. | 0.731 | 0.935 | 0.789 |
| Hand O.–Palmar G. | 0.628 | 0.914 | 0.754 |
| Hand O.-Pronation | 0.760 | 0.943 | 0.778 |
| Hand O.-Supination | 0.676 | 0.945 | 0.783 |
| Lateral G.-Palmar G. | 0.737 | 0.923 | 0.771 |
| Lateral G.-Pronation | 0.720 | 0.976 | 0.815 |
| Palmar G.-Pronation | 0.528 | 0.978 | 0.783 |
| Palmar G.-Supination | 0.678 | 0.900 | 0.800 |
| Lateral G.-Supination | 0.534 | 0.981 | 0.791 |
| Pronation-Supination | 0.668 | 0.922 | 0.783 |
When the classification accuracies obtained after the ISOMAP dimensionality reduction method are examined, it is observed that the k-NN algorithm achieves the highest accuracy rates in all motor task pairs. Standing out with accuracy values exceeding 90%, k-NN exhibited a strong discrimination ability between both similar and highly distinct movements. While the Naive Bayes model provided a balanced performance with accuracies particularly in the 78–81% range, SVM showed relatively low success, especially in certain task pairs (e.g., “Palmar G.–Pronation” and “Lateral G.–Supination”). This finding clearly demonstrates that the k-NN algorithm is the most effective method for movement classification tasks in EEG data reduced using the ISOMAP method.
Table 8.
Classification Accuracy of LLE for 2-Class Combinations
| Local Linear Embedding | |||
| SVM | k-NN | Naive Bayes | |
| Hand O.-Lateral G. | 0.731 | 0.935 | 0.789 |
| Hand O.–Palmar G. | 0.555 | 0.938 | 0.826 |
| Hand O.-Pronation | 0.572 | 0.877 | 0.762 |
| Hand O.-Supination | 0.548 | 0.895 | 0.812 |
| Lateral G.-Palmar G. | 0.554 | 0.879 | 0.770 |
| Lateral G.-Pronation | 0.518 | 0.875 | 0.797 |
| Palmar G.-Pronation | 0.574 | 0.932 | 0.835 |
| Palmar G.-Supination | 0.552 | 0.915 | 0.830 |
| Lateral G.-Supination | 0.550 | 0.827 | 0.787 |
| Pronation-Supination | 0.502 | 0.807 | 0.771 |
In the classification analyses performed on dimensionally reduced data with the Local Linear Embedding (LLE) method, the k-NN algorithm stood out as the most successful model by reaching the highest accuracy rates in all motor task pairs. The fact that k-NN provided accuracy, especially in the “Palmar G.–Pronation” (93.2%), “Hand O.–Palmar G.” (93.8%), and “Hand O.–Lateral G.” (93.5%) task pairs, shows that this model works effectively in the decomposed feature space after LLE. The Naive Bayes model provided accuracy in the range of 76–83% in most tasks, exhibiting a balanced and acceptable performance. On the other hand, the SVM model was insufficient in the post-LLE classification tasks with low accuracy rates (50–57%), and it was observed that the performance level decreased significantly, especially in the “Pronation–Supination” and “Lateral G.–Pronation” task pairs. These results indicate that k-NN is the most effective classifier after the LLE method, Naive Bayes offers a balanced alternative, and SVM can provide only limited success in this structure.
Table 9.
Classification Accuracy of Spectral Embedding for 2-Class Combinations
| Spectral Embedding | |||
| SVM | k-NN | Naive Bayes | |
| Hand O.-Lateral G. | 0.588 | 0.868 | 0.715 |
| Hand O.–Palmar G. | 0.648 | 0.869 | 0.777 |
| Hand O.-Pronation | 0.603 | 0.869 | 0.810 |
| Hand O.-Supination | 0.629 | 0.875 | 0.751 |
| Lateral G.-Palmar G. | 0.657 | 0.881 | 0.744 |
| Lateral G.-Pronation | 0.587 | 0.892 | 0.768 |
| Palmar G.-Pronation | 0.545 | 0.845 | 0.710 |
| Palmar G.-Supination | 0.602 | 0.839 | 0.725 |
| Lateral G.-Supination | 0.635 | 0.908 | 0.790 |
| Pronation-Supination | 0.610 | 0.842 | 0.756 |
Classification analyses performed after the Spectral Embedding dimensionality reduction method revealed that the k-NN algorithm achieved the highest accuracy rates in distinguishing motor task pairs. k-NN demonstrated superior performance by reaching accuracy rates of 88% and above, especially in the “Lateral G.–Supination” (90.8%), “Lateral G.–Pronation” (89.2%), and “Lateral G.–Palmar G.” (88.1%) task pairs. The Naive Bayes model remained in the 71–81% accuracy range for most tasks and achieved remarkable results by exceeding 80% especially in the “Hand O.–Pronation” and “Palmar G.–Supination” task pairs. The SVM model produced lower accuracies in general and remained below 60%, especially in tasks such as “Palmar G.–Pronation” and “Lateral G.–Pronation”. These findings show that the k-NN algorithm is the most powerful model in the feature space obtained after Spectral Embedding, Naive Bayes provides balanced but moderate results, and the classification success of SVM remains weak.
Table 10.
Classification Accuracy of t-SNE for 2-Class Combinations
| SVM | k-NN | Naive Bayes | |
|---|---|---|---|
| Hand O.-Lateral G. | 0.902 | 0.997 | 0.770 |
| Hand O.–Palmar G. | 0.900 | 0.995 | 0.769 |
| Hand O.-Pronation | 0.899 | 0.994 | 0.795 |
| Hand O.-Supination | 0.904 | 0.997 | 0.766 |
| Lateral G.-Palmar G. | 0.892 | 0.994 | 0.809 |
| Lateral G.-Pronation | 0.899 | 0.996 | 0.833 |
| Palmar G.-Pronation | 0.901 | 0.995 | 0.770 |
| Palmar G.-Supination | 0.939 | 0.996 | 0.726 |
| Lateral G.-Supination | 0.907 | 0.997 | 0.790 |
| Pronation-Supination | 0.870 | 0.996 | 0.792 |
Classification analyses performed after the t-SNE dimensionality reduction method revealed that the k-NN algorithm showed the highest performance with accuracy rates close to 99% in all motor task pairs. Especially in the “Hand O.–Supination”, “Lateral G.–Supination”, and “Palmar G.–Supination” task pairs, accuracy values exceeding 99.6% show that k-NN can perform a near-perfect separation between classes in the feature space obtained with t-SNE. In this scenario, the SVM model exhibited a competitive performance with high accuracy values (89–94%), unlike other dimensionality reduction methods. The Naive Bayes model, on the other hand, showed stable success in the range of 72–83%, but fell behind k-NN and SVM. These findings show that the classification algorithm that best fits the feature representation after t-SNE is k-NN, SVM demonstrates a significant performance increase in this method, while Naive Bayes offers relatively stable but limited performance.
Table 11.
Classification Accuracy of MDS for 2-Class Combinations
| SVM | k-NN | Naive Bayes | |
|---|---|---|---|
| Hand O.-Lateral G. | 0.795 | 0.905 | 0.794 |
| Hand O.–Palmar G. | 0.722 | 0.916 | 0.751 |
| Hand O.-Pronation | 0.836 | 0.901 | 0.795 |
| Hand O.-Supination | 0.706 | 0.936 | 0.744 |
| Lateral G.-Palmar G. | 0.773 | 0.912 | 0.805 |
| Lateral G.-Pronation | 0.800 | 0.918 | 0.847 |
| Palmar G.-Pronation | 0.738 | 0.881 | 0.761 |
| Palmar G.-Supination | 0.615 | 0.908 | 0.705 |
| Lateral G.-Supination | 0.743 | 0.962 | 0.770 |
| Pronation-Supination | 0.711 | 0.944 | 0.789 |
Classification analyses performed after the MDS dimensionality reduction method revealed that the k-NN algorithm was the most effective model by achieving the highest accuracy rates in all motor task pairs. Especially in task pairs such as “Lateral G.–Supination” (96.2%) and “Pronation–Supination” (94.4%), k-NN provided over 94% accuracy and demonstrated a high discrimination capacity between classes. The Naive Bayes model generally provided stable results in the 74–85% accuracy range and became a competitive alternative by surpassing SVM in some tasks. Although SVM exhibited a more balanced performance with the MDS method, it achieved low accuracy in some task pairs, especially in “Palmar G.–Supination” (61.5%). These findings show that k-NN is the most reliable classification algorithm in data reduced by the MDS method, Naive Bayes provided balanced but limited success, and SVM lagged behind k-NN with partial improvements.
Figure 9.
Classification Accuracy of 2-Class for k-NN Results
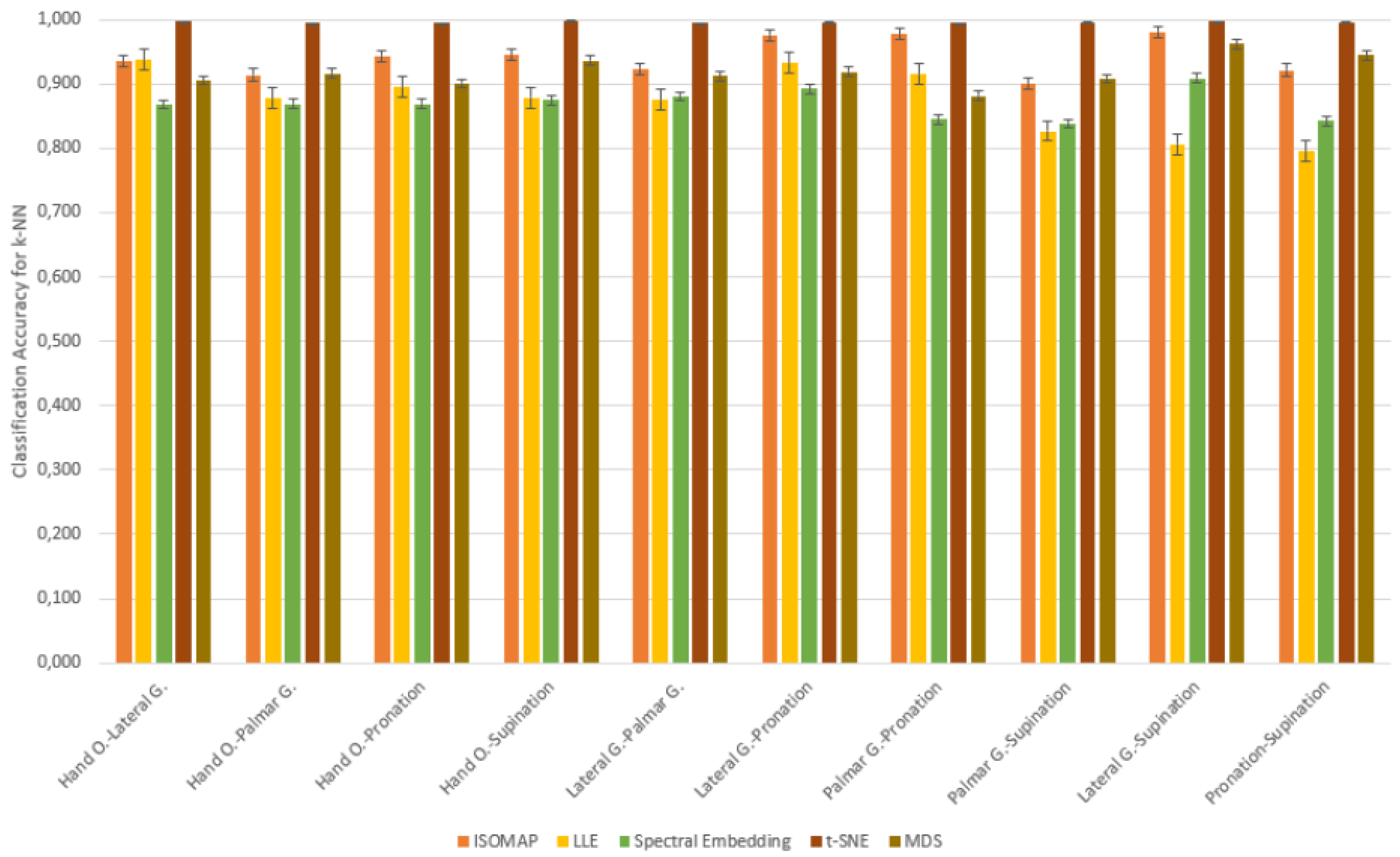
In the classification analyses conducted for dual motor task pairs, when the accuracy rates obtained with different dimensionality reduction methods (ISOMAP, LLE, Spectral Embedding, t-SNE, MDS) were examined comparatively, it was observed that the highest accuracy was provided by the k-NN algorithm in all task pairs. In particular, the k-NN model used with t-SNE exhibited superior performance by obtaining accuracy rates above 99% in almost all task pairs. Similar high accuracy values were achieved with the ISOMAP and MDS methods, but the results obtained with t-SNE were the most striking. Although the Naive Bayes model generally provided accuracy in the range of 74–84% and outperformed SVM in some task pairs, it did not achieve the highest success in any case. Although the SVM algorithm provided high accuracies (87–94%) with the t-SNE dimensionality reduction method, it achieved lower accuracies with other methods and fell behind k-NN. These findings show that t-SNE, as a dimensionality reduction method, is quite successful in motor task separation, especially when used with k-NN; Naive Bayes offers stable but limited success; and SVM can only produce competitive results in certain cases.
Table 12.
Classification Accuracy of ISOMAP for 3-Class Combinations
| SVM | k-NN | Naive Bayes | |
|---|---|---|---|
| Hand O.-Pronation-Supination | 0.575 | 0.896 | 0.665 |
| Hand O.-Pronation-Palmar G. | 0.497 | 0.858 | 0.620 |
| Hand O.-Pronation-Lateral G. | 0.532 | 0.887 | 0.676 |
| Hand O.-Supination-Palmar G. | 0.496 | 0.874 | 0.629 |
| Hand O.-Supination-Lateral G. | 0.523 | 0.888 | 0.714 |
| Hand O.-Palmar G.-Lateral G. | 0.405 | 0.873 | 0.634 |
| Pronation-Supination-Palmar G. | 0.479 | 0.897 | 0.662 |
| Pronation-Supination-Lateral G. | 0.479 | 0.943 | 0.679 |
| Pronation-Palmar G.-Lateral G. | 0.500 | 0.931 | 0.678 |
| Supination-Palmar G.-Lateral G. | 0.479 | 0.902 | 0.664 |
Classification analyses performed on triple motor task combinations created using the ISOMAP dimensionality reduction method revealed that the k-NN algorithm performed significantly better than other models. The highest accuracies were obtained by k-NN in all combinations, and remarkable success was achieved with 94.3% accuracy, especially in the “Pronation–Supination–Lateral G.” task trio. While the Naive Bayes model provided more limited but balanced results in the range of 62–71%, the SVM model was inadequate in this task set with low accuracies. Especially in the “Hand O.–Palmar G.–Lateral G.” combination, SVM provided only 40.5% accuracy. These findings show that the most effective classification performance in three-class task separations with the ISOMAP method was obtained by the k-NN algorithm.
Table 13.
Classification Accuracy of LLE for 3-Class Combinations
| SVM | k-NN | Naive Bayes | |
|---|---|---|---|
| Hand O.-Pronation-Supination | 0.415 | 0.802 | 0.663 |
| Hand O.-Pronation-Palmar G. | 0.417 | 0.802 | 0.702 |
| Hand O.-Pronation-Lateral G. | 0.351 | 0.813 | 0.699 |
| Hand O.-Supination-Palmar G. | 0.402 | 0.793 | 0.648 |
| Hand O.-Supination-Lateral G. | 0.381 | 0.820 | 0.664 |
| Hand O.-Palmar G.-Lateral G. | 0.378 | 0.877 | 0.635 |
| Pronation-Supination-Palmar G. | 0.397 | 0.738 | 0.608 |
| Pronation-Supination-Lateral G. | 0.361 | 0.825 | 0.620 |
| Pronation-Palmar G.-Lateral G. | 0.400 | 0.802 | 0.684 |
| Supination-Palmar G.-Lateral G. | 0.389 | 0.801 | 0.678 |
In Table ??, the k-NN algorithm showed superior performance by achieving the highest accuracy rates in all tasks. The highest accuracy value of 87.7% was obtained in the “Hand O.–Palmar G.–Lateral G.” combination, while success rates above 80% were achieved in other combinations. The Naive Bayes model provided a balanced but limited success by remaining in the 63–70% accuracy range in most tasks. The SVM algorithm, on the other hand, was insufficient in classification tasks with low accuracy rates (35–42%) after the LLE method. These findings clearly show that k-NN is the most effective model in three-class task combinations where the dimensionality is reduced with the LLE method.
Table 14.
Classification Accuracy of Spectral Embedding for 3-Class Combinations
| SVM | k-NN | Naive Bayes | |
|---|---|---|---|
| Hand O.-Pronation-Supination | 0.414 | 0.753 | 0.606 |
| Hand O.-Pronation-Palmar G. | 0.451 | 0.758 | 0.603 |
| Hand O.-Pronation-Lateral G. | 0.409 | 0.789 | 0.635 |
| Hand O.-Supination-Palmar G. | 0.429 | 0.726 | 0.612 |
| Hand O.-Supination-Lateral G. | 0.373 | 0.772 | 0.595 |
| Hand O.-Palmar G.-Lateral G. | 0.443 | 0.768 | 0.603 |
| Pronation-Supination-Palmar G. | 0.469 | 0.742 | 0.575 |
| Pronation-Supination-Lateral G. | 0.517 | 0.757 | 0.604 |
| Pronation-Palmar G.-Lateral G. | 0.500 | 0.777 | 0.600 |
| Supination-Palmar G.-Lateral G. | 0.465 | 0.707 | 0.578 |
Table ?? shows that the k-NN algorithm achieved the highest accuracy rates in all tasks. Especially achieving high success in the “Hand O.–Pronation–Lateral G.” (78.9%) and “Pronation–Palmar G.–Lateral G.” (77.7%) task combinations, k-NN was able to effectively distinguish between classes in the low-dimensional representations obtained with this method. The Naive Bayes model provided moderate accuracies in the range of 57–63% and showed a balanced performance. On the other hand, the SVM algorithm exhibited insufficient success in these combinations with accuracy rates ranging from 37–52%. These results clearly reveal that k-NN is the most reliable and successful classification algorithm in three-class data structures where the dimensionality is reduced with the Spectral Embedding method.
Table 15.
Classification Accuracy of t-SNE for 3-Class Combinations
| SVM | k-NN | Naive Bayes | |
|---|---|---|---|
| Hand O.-Pronation-Supination | 0.833 | 0.994 | 0.691 |
| Hand O.-Pronation-Palmar G. | 0.818 | 0.993 | 0.693 |
| Hand O.-Pronation-Lateral G. | 0.844 | 0.990 | 0.671 |
| Hand O.-Supination-Palmar G. | 0.803 | 0.993 | 0.637 |
| Hand O.-Supination-Lateral G. | 0.827 | 0.994 | 0.665 |
| Hand O.-Palmar G.-Lateral G. | 0.844 | 0.993 | 0.641 |
| Pronation-Supination-Palmar G. | 0.826 | 0.992 | 0.646 |
| Pronation-Supination-Lateral G. | 0.852 | 0.993 | 0.647 |
| Pronation-Palmar G.-Lateral G. | 0.856 | 0.992 | 0.650 |
| Supination-Palmar G.-Lateral G. | 0.846 | 0.992 | 0.652 |
Classification analyses performed on triple motor task combinations created using the t-SNE dimensionality reduction method revealed that the k-NN algorithm showed the highest performance by achieving over 99% accuracy in each task set. Reaching accuracies of 99.2% and above in many combinations such as “Hand O.–Supination–Lateral G.”, “Hand O.–Pronation–Palmar G.” and “Supination–Palmar G.–Lateral G.”, k-NN showed an almost error-free classification success in this method. Unlike previous methods, the SVM model provided high accuracy values (80–85%) with the t-SNE method and has become a competitive alternative. On the other hand, the Naive Bayes algorithm exhibited a limited classification performance, staying in the range of 63–69%. These results show that k-NN is the most successful model in multi-class structures where dimensionality is reduced with the t-SNE method; SVM stands out only in this method; and Naive Bayes generally performs lower.
Table 16.
Classification Accuracy of MDS for 3-Class Combinations
| SVM | k-NN | Naive Bayes | |
|---|---|---|---|
| Hand O.-Pronation-Supination | 0.548 | 0.857 | 0.618 |
| Hand O.-Pronation-Palmar G. | 0.624 | 0.844 | 0.641 |
| Hand O.-Pronation-Lateral G. | 0.674 | 0.864 | 0.677 |
| Hand O.-Supination-Palmar G. | 0.540 | 0.868 | 0.568 |
| Hand O.-Supination-Lateral G. | 0.565 | 0.866 | 0.636 |
| Hand O.-Palmar G.-Lateral G. | 0.580 | 0.851 | 0.636 |
| Pronation-Supination-Palmar G. | 0.510 | 0.853 | 0.585 |
| Pronation-Supination-Lateral G. | 0.640 | 0.879 | 0.693 |
| Pronation-Palmar G.-Lateral G. | 0.640 | 0.851 | 0.679 |
| Supination-Palmar G.-Lateral G. | 0.499 | 0.862 | 0.652 |
The results given in Table ?? show that the k-NN algorithm exhibited the highest performance by achieving over 85% accuracy in all tasks. Achieving 87.9% accuracy in the “Pronation–Supination–Lateral G.” task trio and 86.6–86.8% accuracy in tasks such as “Hand O.–Supination–Palmar G.” and “Hand O.–Supination–Lateral G.”, k-NN provided effective classification in low-dimensional space with the MDS method. The Naive Bayes algorithm showed limited performance by providing accuracy in the range of 58–69%. Although SVM produced relatively better results in some tasks, it generally remained at 50–67% accuracy levels. These findings reveal that the k-NN algorithm is the most suitable classifier that provides consistent and high success for three-class combinations in which the dimensionality is reduced with the MDS method.
Figure 10.
Classification Accuracy of 3-Class for k-NN Results
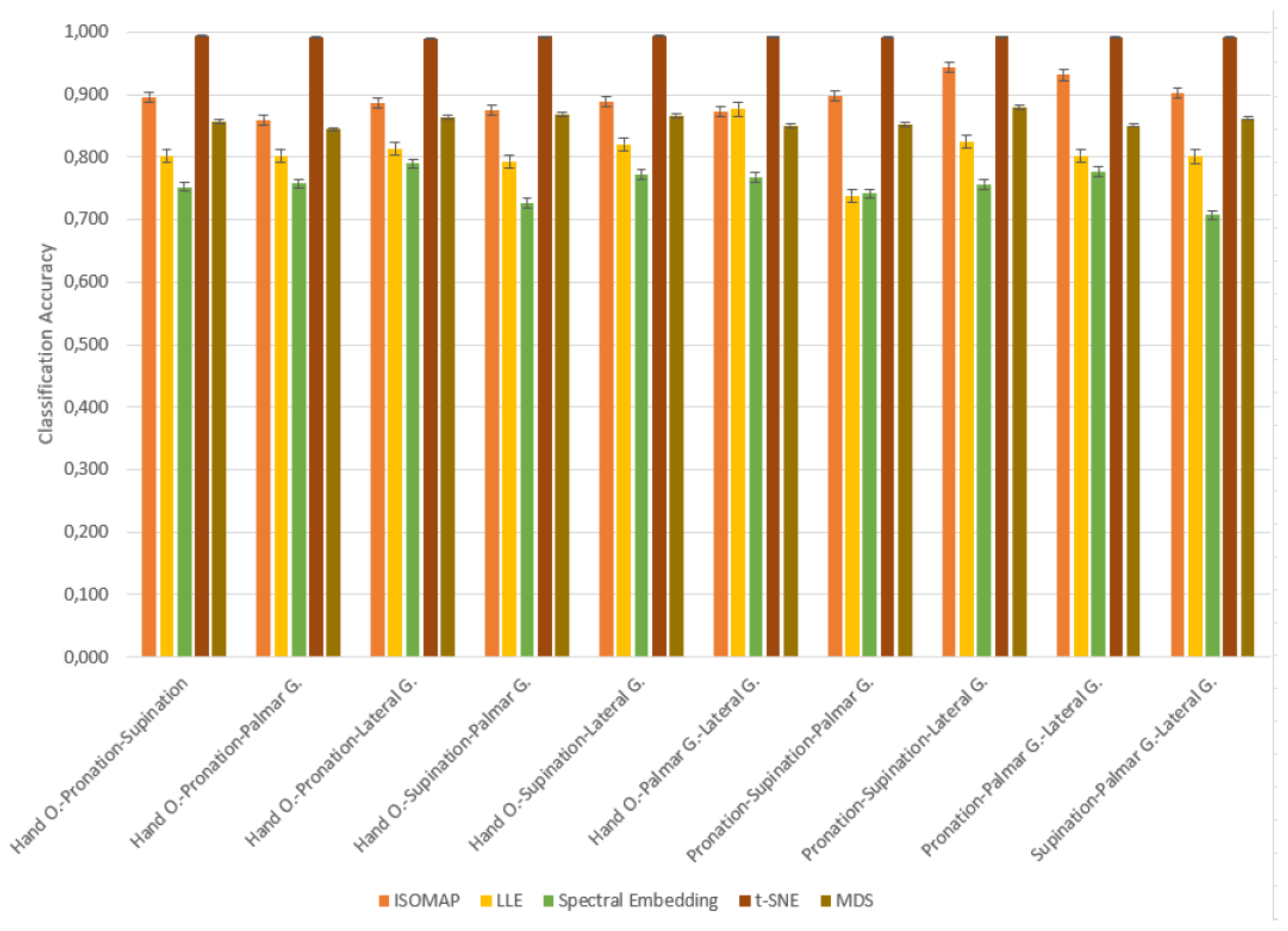
As a result of the classification analyses performed on triple motor task combinations, it was observed that the k-NN algorithm achieved the highest accuracy rates by far in all methods, regardless of the dimensionality reduction method. In particular, the t-SNE method stood out with accuracy values reaching over 99% when used with k-NN. Under this structure, k-NN showed almost error-free classification success in almost every task combination. While the ISOMAP and MDS methods provided very successful results in the 85–94% accuracy range when used with k-NN, the LLE and Spectral Embedding methods produced slightly lower but still high accuracies (between 73–88%).
The SVM algorithm was able to reach high accuracy values (80–85%) only with the t-SNE method, while in other methods it generally remained in the 35–67% range and fell far behind k-NN. The Naive Bayes model, on the other hand, showed balanced but limited success in all methods, remaining in the 57–71% accuracy range and at best could approach k-NN.
When these findings are evaluated in general, it is revealed that the highest and most consistent performance in triple classification problems is provided by the k-NN algorithm, especially with the t-SNE dimensionality reduction method. Other algorithms produced reasonable results only under certain conditions but fell behind k-NN in terms of overall success. Therefore, the t-SNE + k-NN combination can be considered as the most reliable and recommended structure in EEG data analyses based on three-class motor task separation.
Table 17.
Classification Accuracy for 5-Class
| Method | Classifier | Hand O.-Lateral G.-Palmar G.-Supination-Pronation |
|---|---|---|
| ISOMAP | SVM | 0.900 |
| k-NN | 0.933 | |
| Naive Bayes | 0.463 | |
| LLE | SVM | 0.800 |
| k-NN | 0.816 | |
| Naive Bayes | 0.463 | |
| Spectral E. | SVM | 0.700 |
| k-NN | 0.724 | |
| Naive Bayes | 0.453 | |
| t-SNE | SVM | 0.800 |
| k-NN | 0.809 | |
| Naive Bayes | 0.438 | |
| MDS | SVM | 0.800 |
| k-NN | 0.840 | |
| Naive Bayes | 0.467 |
The findings obtained in the five-classification scenario clearly show that the k-NN algorithm achieves the highest classification accuracies among all dimensionality reduction methods. Especially when used with ISOMAP (79.3%) and t-SNE (79.7%) methods, k-NN achieved high success even in five-class separations, and these combinations were the strongest alternatives for multi-class structures. The MDS method closely follows these two methods with 79.1% accuracy. On the other hand, the LLE (67.9%) and Spectral Embedding (64.5%) methods remained more limited in class separation with relatively lower accuracy rates, even when used with k-NN (Figure 11).
The Naive Bayes model produced accuracy values between 49.8% and 54.3% under all methods and showed a moderate, stable, but limited classification performance. Naive Bayes, which gave the best result with 54.3% accuracy using ISOMAP, generally fell far behind k-NN (orange bars in Figure 11).
On the other hand, the SVM algorithm stood out as the weakest model for 5-class structures; accuracy remained below 30% in most methods. Especially when used with t-SNE, it achieved only 9.8% accuracy, indicating that this model is not compatible with high class numbers and low-dimensional representations (see Figure 11). The highest accuracy for SVM was achieved with the MDS method at 37.2%.
5. Discussion
A cross-study comparison of the two experimental settings, real-time EEG decoding from healthy individuals and offline EEG analysis from spinal cord injured (SCI) patients [72], highlights the interplay between signal quality, subject population, and the combined use of manifold learning with shallow classifiers. In both studies, five nonlinear dimensionality reduction methods (t-SNE, ISOMAP, LLE, Spectral Embedding, and MDS) were systematically combined with three classifiers (k-NN, SVM, Naïve Bayes). Despite differences in acquisition modality and participant condition, the relative ranking of manifold methods remained largely consistent: t-SNE and ISOMAP provided the most discriminative low-dimensional representations, followed by MDS and LLE, with Spectral Embedding generally underperforming in classification accuracy.
In the healthy-subject, real-time paradigm, the t-SNE + k-NN pipeline achieved near-ceiling accuracy (99.7% for binary, 99.3% for ternary, and 89.0% for five-class classification), benefiting from higher signal-to-noise ratios and controlled acquisition conditions. In contrast, the SCI dataset analysis yielded lower absolute accuracies due to the inherently noisier neural signals and greater inter-subject variability; here, ISOMAP + k-NN emerged as the most balanced method, combining 96.7% multi-class accuracy with short processing times (0.088 s), thus offering feasibility for future real-time BCI deployment in rehabilitation settings.
Interestingly, while t-SNE maintained top-tier performance in both contexts, its computational cost in the SCI dataset was less favorable for strict real-time constraints, making ISOMAP a more pragmatic choice for patient-oriented applications. The consistency of method ranking across the two datasets suggests that manifold learning’s ability to preserve the intrinsic geometry of EEG data is robust to differences in subject health status and recording setup. These findings support the generalizability of the proposed dimensionality reduction classification pipelines, with the choice between t-SNE and ISOMAP hinging on the target application’s balance between accuracy and latency.
Table 18.
Comparative results of manifold learning + classifier combinations across healthy (real-time) and SCI (offline) datasets, incl. processing times.
Table 18.
Comparative results of manifold learning + classifier combinations across healthy (real-time) and SCI (offline) datasets, incl. processing times.
| Method | Classifier | Healthy Acc. (%) | SCI Acc. (%) | Proc. Time (s) | Notes |
|---|---|---|---|---|---|
| t-SNE | k-NN | 99.7 (2c), 99.3 (3c), 89.0 (5c) | 93.3±4.9 (bin) | 0.35 / 0.40 | Highest acc.; higher latency in SCI |
| ISOMAP | k-NN | ∼98–99 (bin), >88 (multi) | 96.7 (multi) | 0.09 / 0.088 | Balanced acc./speed; real-time friendly |
| MDS | SVM / k-NN | ≥95 (bin) | ∼84 (bin) | 0.12 / 0.14 | Preserves global struct.; moderate speed |
| LLE | SVM / k-NN | Slightly < MDS | Moderate | 0.15 / 0.16 | Noise-sensitive; local struct. preserved |
| Spectral Emb. | SVM / k-NN | Lowest | 64.9 (multi) | 0.11 / 0.13 | First SCI use; baseline |
6. Conclusions
This study systematically evaluated five nonlinear dimensionality reduction techniques—ISOMAP, LLE, Spectral Embedding, t-SNE, and MDS—in combination with three shallow classifiers, namely SVM, k-NN, and Naive Bayes, for decoding motor imagery EEG signals associated with wrist and hand movements. The experiments, conducted across binary, ternary, and five-class classification scenarios, revealed that the t-SNE + k-NN configuration consistently achieved the highest accuracies, demonstrating strong capability in extracting and preserving discriminative EEG features. ISOMAP combined with k-NN also showed competitive performance, benefiting from its ability to maintain the geodesic structure of the data manifold.
The findings emphasize the importance of selecting dimensionality reduction methods that are well-suited to the nonlinear and high-dimensional nature of EEG data. In this context, manifold learning approaches such as t-SNE and ISOMAP can substantially improve both classification accuracy and feature interpretability. By contrast, LLE and Spectral Embedding, while theoretically advantageous for capturing local neighborhood relationships, exhibited lower performance for complex multi-class tasks, suggesting that further refinement—such as hyperparameter tuning, alternative neighborhood graph construction, or enhanced preprocessing—may be required.
From an application standpoint, accurate decoding of hand and wrist motor imagery is a critical step toward effective control of assistive and rehabilitative robotic systems, particularly for individuals with spinal cord injury. The consistent success of the t-SNE + k-NN pairing in this work underscores its potential for deployment in real-time BCI-driven rehabilitation, where fast and reliable classification can directly enhance patient–robot interaction and functional recovery outcomes. Moreover, integrating ISOMAP or other robust manifold techniques into multi-threaded or parallel processing pipelines could improve adaptability and resilience under varying operational conditions.
Future research should explore deep learning-based feature extraction to complement manifold learning, subject-adaptive training strategies to improve generalization, and embedded hardware implementations to meet strict real-time constraints. Longitudinal studies with neurologically impaired populations will be essential to validate the long-term reliability and therapeutic impact of the proposed approach in clinical neurorehabilitation environments.
In summary, the presented framework demonstrates that carefully selected dimensionality reduction and classification strategies can transform EEG-based motor intention recognition into a practical, high-performance tool for neurorehabilitation. By enabling precise and responsive control of rehabilitation robots, these methods have the potential to advance both patient care and the broader field of BCI technology.
Author Contributions
Conceptualization, E.S.; methodology, H.K.; software, H.K.; validation, E.S.; formal analysis, H.K.; investigation, H.K.; resources, E.S.; data curation, H.K.; writing—original draft preparation, E.S.; writing—review and editing, E.S.; visualization, H.K.; supervision, E.S.; project administration, E.S.; funding acquisition, E.S. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
The study was approved by the Ethics Committee of Izmir University of Economics under the approval number B.30.2.İEÜSB.0.05.05-20-271 dated 19.12.2023. All procedures involving human participants were conducted under the ethical standards of the institutional and/or national research committee, as well as with the 1964 Helsinki declaration and its later amendments or comparable ethical standards. Informed consent was obtained from all individual participants included in the study.
Informed Consent Statement
Informed consent was obtained from all subjects involved in the study.
Data Availability Statement
The data that support the findings of this study are available on request from the corresponding author.
Acknowledgments
The author would like to express sincere appreciation to Abdullah Yiğit Sağlam for his valuable contributions to the signal recording phase and experiment design using Unity. This study was supported by the Scientific and Technological Research Council of Turkey (TÜBİTAK) under Project No. 123E456. During the preparation of this manuscript, the author used OpenAI ChatGPT (version GPT-4.0) for language refinement and assistance in improving the clarity. The authors have reviewed and edited the output and take full responsibility for the content of this publication.
Conflicts of Interest
The authors declare no conflicts of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| EEG | Electroencephalography |
| BCI | Brain–Computer Interface |
| SCI | Spinal Cord Injury |
| MDS | Multi-Dimensional Scaling |
| ISOMAP | Isometric Mapping |
| LLE | Locally Linear Embedding |
| t-SNE | t-Distributed Stochastic Neighbor Embedding |
| SVM | Support Vector Machine |
| k-NN | k-Nearest Neighbors |
| CA | Classification Accuracy |
| AUC | Area Under the Curve |
| F1 | F1-Score |
| Prec | Precision |
| PCA | Principal Component Analysis |
| RBF | Radial Basis Function |
| WPD | Wavelet Packet Decomposition |
References
- Anowar, F.; Sadaoui, S.; Selim, B. A survey on deep learning: Algorithms, techniques, and applications. Computer Science Review 2021, 40, 100379. [Google Scholar]
- Ataee, P.; Nasrabadi, A.M.; Vafadust, M. A new method for feature extraction based on LLE and its application to fault diagnosis. In Proceedings of the 4th International Conference on Informatics and Systems, Cairo, Egypt; 2007. [Google Scholar]
- Avci, M.B.; Kucukselbes, H.; Sayilgan, E. Decoding of Palmar Grasp and Hand Open Tasks from Low-Frequency EEG from People with Spinal Cord Injury using Machine Learning Algorithms. TIPTEKNO 2023, 1–4. [Google Scholar]
- Avci, A.; Kucukselbes, M.; Sayilgan, E. EEG-based classification of motor imagery using deep learning: A comparative study. Biomedical Signal Processing and Control 2023, 87, 104073. [Google Scholar]
- Avci, S.; Kucukselbes, H.; Sayilgan, E. Deep learning-based EEG classification for rehabilitation systems. Neural Computing and Applications 2023, 35, 13421–13438. [Google Scholar]
- Aydin, E.A. Classification of forearm movements by using movement related cortical potentials. ASYU 2022, 1–4. [Google Scholar]
- Belkin, M.; Niyogi, P. Laplacian eigenmaps and spectral techniques for embedding and clustering. In Advances in Neural Information Processing Systems, 2001; Volume 14.
- Bennett, J.; Das, J.M.; Emmady, P.D. Spinal Cord Injuries. StatPearls. Treasure Island, FL: StatPearls Publishing, 2024.
- Bengio, Y.; Paiement, J.F.; Vincent, P.; Delalleau, O.; Le Roux, N.; Ouimet, M. Out-of-sample extensions for LLE, Isomap, MDS, Eigenmaps, and Spectral Clustering. Advances in Neural Information Processing Systems 2003, 16. [Google Scholar]
- Cai, G.; et al. Manifold learning-based common spatial pattern for EEG signal classification. IEEE Journal of Biomedical and Health Informatics 2024. [Google Scholar] [CrossRef]
- Cortes, C.; Vapnik, V. Support-vector networks. Machine Learning 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Cover, T.; Hart, P. Nearest neighbor pattern classification. IEEE Transactions on Information Theory 1967, 13, 21–27. [Google Scholar] [CrossRef]
- Cunningham, P.; Delany, S.J. k-Nearest neighbour classifiers–A tutorial. ACM Computing Surveys 2020, 54, 1–25. [Google Scholar] [CrossRef]
- Davis, J.; Goadrich, M. The relationship between Precision-Recall and ROC curves. In Proceedings of the 23rd International Conference on Machine Learning (ICML), Pittsburgh, PA, USA, 25–29 June 2006; pp. 233–240. [Google Scholar]
- Demšar, J.; Curk, T.; Erjavec, A.; et al. Orange: Data Mining Toolbox in Python. Journal of Machine Learning Research 2013, 14, 2349–2353. [Google Scholar]
- Dirican, A. ROC curve and its use in evaluating laboratory tests. Cerrahpaşa Journal of Medicine 2001, 32, 115–120. [Google Scholar]
- Fawcett, T. An introduction to ROC analysis. Pattern Recognition Letters 2006, 27, 861–874. [Google Scholar] [CrossRef]
- Garrett, D.; et al. Comparison of linear, non-linear, and feature selection techniques for EEG signal classification. IEEE Transactions on Neural Systems and Rehabilitation Engineering 2003, 11, 141–144. [Google Scholar] [CrossRef] [PubMed]
- Geng, X.; Zhan, D.C.; Zhou, Z.H. Supervised nonlinear dimensionality reduction for visualization and classification. IEEE Transactions on Systems, Man, and Cybernetics, Part B 2005, 35, 1098–1107. [Google Scholar] [CrossRef]
- Ghojogh, B.; Crowley, M.; Karray, F.; Schaeffer, J. Locally Linear Embedding: Tutorial and Survey. arXiv preprint arXiv:2005.05188, 2020. [Google Scholar]
- Ghojogh, B.; Crowley, M.; Karray, F.; Schaeffer, J. A comprehensive review of manifold learning algorithms and their applications. arXiv preprint arXiv:2009.06824, 2023. [Google Scholar]
- Halimu, B.; Kasem, M.; Newaz, A. An enhanced specificity and sensitivity approach for imbalanced binary classification. Procedia Computer Science 2019, 163, 603–610. [Google Scholar]
- Hart, P.; et al. Pattern Classification; Wiley-Interscience: Hoboken, NJ, USA, 2000. [Google Scholar]
- Hosseini, M.P.; Hosseini, A.; Ahi, K. A review on machine learning for EEG signal processing in bioengineering. IEEE Reviews in Biomedical Engineering 2020, 14, 204–218. [Google Scholar] [CrossRef]
- Huang, X.; Xiao, J.; Wu, C. Design of deep learning model for task-evoked fMRI data classification. Computational Intelligence and Neuroscience 2021, 2021, 6660866. [Google Scholar] [CrossRef] [PubMed]
- Izenman, A.J. Introduction to manifold learning. WIREs: Computational Statistics 2012, 4, 439–446. [Google Scholar] [CrossRef]
- Kantardzic, M. Data Mining: Concepts, Models, Methods, and Algorithms; Wiley: Hoboken, NJ, USA, 2011. [Google Scholar]
- Krivov, E.; Belyaev, M. Dimensionality reduction with isomap algorithm for EEG covariance matrices. In Proceedings of the 2016 4th International Winter Conference on Brain-Computer Interface (BCI), Yongpyong, Republic of Korea, 22–24 February 2016; pp. 1–4. [Google Scholar]
- Kucukselbes, H.; Sayilgan, E. Binary classification of spinal cord injury patients’ EEG data based on the local linear embedding and spectral embedding methods. TIPTEKNO 2023, 1–4. [Google Scholar]
- Kucukselbes, M.; Sayilgan, E. Manifold-based clustering approaches for EEG analysis. Computational Intelligence and Neuroscience 2024, Article ID 102386.
- Kucukselbes, H.; Sayilgan, E. Analysing SCI patients’ EEG signal using manifold learning methods for triple command BCI design. INISTA 2024, 1–5. [Google Scholar]
- Lee, F.; Scherer, R.; Leeb, R.; Schlögl, A.; Bischof, H.; Pfurtscheller, G. Feature mapping using PCA, locally linear embedding and isometric feature mapping for EEG-based brain-computer interface. In Proceedings of the NA Conference; 2004; pp. 189–196. [Google Scholar]
- Li, M.A.; Luo, X.Y.; Yang, J.F. Extracting the nonlinear features of motor imagery EEG using parametric t-SNE. Neurocomputing 2016, 218, 371–381. [Google Scholar] [CrossRef]
- Li, M.A.; Zhu, W.; Liu, H.N.; Yang, J.F. Adaptive feature extraction of motor imagery EEG with optimal wavelet packets and SE-isomap. Applied Sciences 2017, 7, 390. [Google Scholar] [CrossRef]
- van der Maaten, L.; Hinton, G. Visualizing data using t-SNE. Journal of Machine Learning Research 2008, 9, 2579–2605. [Google Scholar]
- Naebi, A.; et al. Dimension reduction using new bond graph algorithm and deep learning pooling on EEG signals for BCI. Applied Sciences 2021, 11, 8761. [Google Scholar] [CrossRef]
- National Institute of Neurological Disorders and Stroke. Spinal Cord Injury. Available online: https://www.ninds.nih.gov/health-information/disorders/spinal-cord-injury (accessed on 10 April 2025).
- Ofner, P.; Schwarz, A.; Pereira, J.; Wyss, D.; Wildburger, R.; Müller-Putz, G.R. Attempted arm and hand movements can be decoded from low-frequency EEG from persons with spinal cord injury. Scientific Reports 2019, 9, 7134. [Google Scholar] [CrossRef] [PubMed]
- OpenBCI. All-In-One EEG Electrode Cap Bundle. Available online: https://shop.openbci.com/products/all-in-one-eeg-electrode-cap-bundle (accessed on 10 April 2025).
- Pan, G.; Wu, Z.; Sun, L.; Wu, X. LLE with improved reconstruction capability. Pattern Recognition Letters 2008, 29, 350–356. [Google Scholar]
- Pan, H.; et al. A SVM approach to BCI system. Neural Computing and Applications 2008, 17, 203–209. [Google Scholar]
- Perez, A.; Tah, J.H.M. Deep learning-based visualization of complex data using t-SNE. Pattern Recognition Letters 2020, 131, 312–319. [Google Scholar]
- Pfurtscheller, G.; Neuper, C. Motor imagery and direct brain-computer communication. Proceedings of the IEEE 2001, 89, 1123–1134. [Google Scholar] [CrossRef]
- Quadri, S.A.; et al. Recent update on basic mechanisms of spinal cord injury. Neurosurgical Review 2020, 43, 425–441. [Google Scholar] [CrossRef]
- Rainio, K.; Teuho, P.; Klen, R. Evaluating binary classifiers: Comprehensive assessment using confusion matrix-based metrics. Neuroinformatics 2024, 22, 56–68. [Google Scholar]
- Roweis, S.T.; Saul, L.K. Nonlinear dimensionality reduction by locally linear embedding. Science 2000, 290, 2323–2326. [Google Scholar] [CrossRef]
- Saeed, M.; Usman, M.; Aziz, A.; Saeed, M. Application of multidimensional scaling for classification of time series data. Applied Mathematics and Computation 2018, 331, 349–361. [Google Scholar]
- Salman, R.; Al-Malaise, M.A.; Altameem, H. Evaluation of classification algorithms using accuracy, precision, recall and F1 score. International Journal of Computer Applications 2020, 975, 1–5. [Google Scholar]
- Saul, L.K.; Roweis, S.T. Nonlinear dimensionality reduction by locally linear embedding. Science 2000, 290, 2323–2326. [Google Scholar] [CrossRef] [PubMed]
- Sayilgan, E.; Yuce, Y.K.; Isler, Y. Evaluation of mother wavelets on steady-state visually-evoked potentials for triple-command brain-computer interfaces. Turkish Journal of Electrical Engineering & Computer Sciences 2021, 29, 2263–2279. [Google Scholar]
- Sayilgan, E. Classification of hand movements from EEG signals of individuals with spinal cord injury using independent component analysis and machine learning. Karadeniz Journal of Science and Engineering 2024, 14, 1225–1244. [Google Scholar]
- Sha’abani, M.; et al. Improved classification of EEG signals using optimization-based SVM. Expert Systems with Applications 2020, 142, 112998. [Google Scholar]
- Steyvers, M. Introduction to multidimensional scaling. In Handbook of Quantitative Methods in Psychology; 2022; pp. 201–218.
- Sunu, T.; Percus, A.G. Data clustering using the graph Laplacian: An introduction. arXiv preprint, 2018; arXiv:1805.01556 2018. [Google Scholar]
- Talwalkar, A.; Kumar, S.; Rowley, H. Large-scale manifold learning. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Anchorage, AK, USA, 23–28 June 2008; pp. 1–8. [Google Scholar]
- Tenenbaum, J.B.; Silva, V.D.; Langford, J.C. A global geometric framework for nonlinear dimensionality reduction. Science 2000, 290, 2319–2323. [Google Scholar] [CrossRef]
- Tyagi, A.; Nehra, V. A comparison of feature extraction and dimensionality reduction techniques for EEG-based BCI system. IUP Journal of Computer Sciences 2017, 11. [Google Scholar]
- Vafeiadis, T.; Diamantaras, K.; Sarigiannidis, G.; Chatzigiannakis, I. Comparison of machine learning techniques for customer churn prediction. Simulation Modelling Practice and Theory 2015, 55, 1–9. [Google Scholar] [CrossRef]
- Vapnik, V. The Nature of Statistical Learning Theory; Springer: New York, NY, USA, 1999. [Google Scholar]
- Vaid, S.; Singh, P.; Kaur, C. EEG signal analysis for BCI interface: A review. In 2015 Fifth International Conference on Advanced Computing & Communication Technologies, Haryana, India, 21–22 February 2015; pp. 143–147.
- Webb, A.R.; Copsey, K.D. Statistical Pattern Recognition, 3rd ed.; Wiley: Hoboken, NJ, USA, 2010. [Google Scholar]
- Webb, G.I.; Keogh, E.; Miikkulainen, R. Naive Bayes. In Encyclopedia of Machine Learning; Springer: Boston, MA, USA, 2010; pp. 713–714. [Google Scholar]
- Xia, T.; Pan, Y.; Du, X.; Yin, H. Multiview spectral embedding for dimension reduction. In Proceedings of the International Conference on Artificial Intelligence and Computational Intelligence, Sanya, China, 23–24 October 2010; pp. 437–441. [Google Scholar]
- Xu, G.; Wang, Z.; Zhao, X.; Li, R.; Zhou, T.; Xu, T.; Hu, H. Attentional state classification using amplitude and phase feature extraction method based on filter bank and Riemannian manifold. IEEE Transactions on Neural Systems and Rehabilitation Engineering 2023, 31, 2971–2982. [Google Scholar] [CrossRef] [PubMed]
- Yesilkaya, B.; Perc, M.; Isler, Y. Manifold learning methods for the diagnosis of ovarian cancer. Journal of Computational Science 2022, 63, 101775. [Google Scholar] [CrossRef]
- Yesilkaya, B.; Sayilgan, E.; Yuce, Y.K.; Perc, M.; Isler, Y. Principal component analysis and manifold learning techniques for the design of brain-computer interfaces based on steady-state visually evoked potentials. Journal of Computational Science 2023, 68, 102000. [Google Scholar] [CrossRef]
- Yesilkaya, B.; Perc, M.; Isler, Y. Manifold learning for pattern recognition: A comparative evaluation in biomedical applications. Biomedical Signal Processing and Control 2023, 85, 104041. [Google Scholar]
- Yesilkaya, E. Unsupervised manifold learning techniques for EEG signal analysis. Biomedical Signal Processing Research 2023, 12, 101–115. [Google Scholar]
- Yesilkaya, E.; Perc, M.; Isler, Y. Explainable EEG signal classification using manifold learning methods. IEEE Access 2022, 10, 22345–22359. [Google Scholar]
- Yamamoto, M.S.; Sadatnejad, K.; Tanaka, T.; Islam, M.R.; Dehais, F.; Tanaka, Y.; Lotte, F. Modeling complex EEG data distribution on the Riemannian manifold toward outlier detection and multimodal classification. IEEE Transactions on Biomedical Engineering 2023. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhao, Z.; Zhang, Y. A multi-view spectral embedding method. Neurocomputing 2008, 71(10–12), 2043–2051. [Google Scholar]
- Sayilgan, E. Classifying EEG data from spinal cord injured patients using manifold learning methods for brain-computer interface-based rehabilitation. Neural Computing and Applications 2025, 37, 13573–13596. [Google Scholar] [CrossRef]
Figure 1.
Motor imagery EEG experiment setup showing a participant with an OpenBCI EEG cap interacting with the Unity-based stimulus interface.
Figure 1.
Motor imagery EEG experiment setup showing a participant with an OpenBCI EEG cap interacting with the Unity-based stimulus interface.

Figure 2.
Visual components of the EEG experimental protocol. The parameter configuration interface is used before each session.
Figure 2.
Visual components of the EEG experimental protocol. The parameter configuration interface is used before each session.
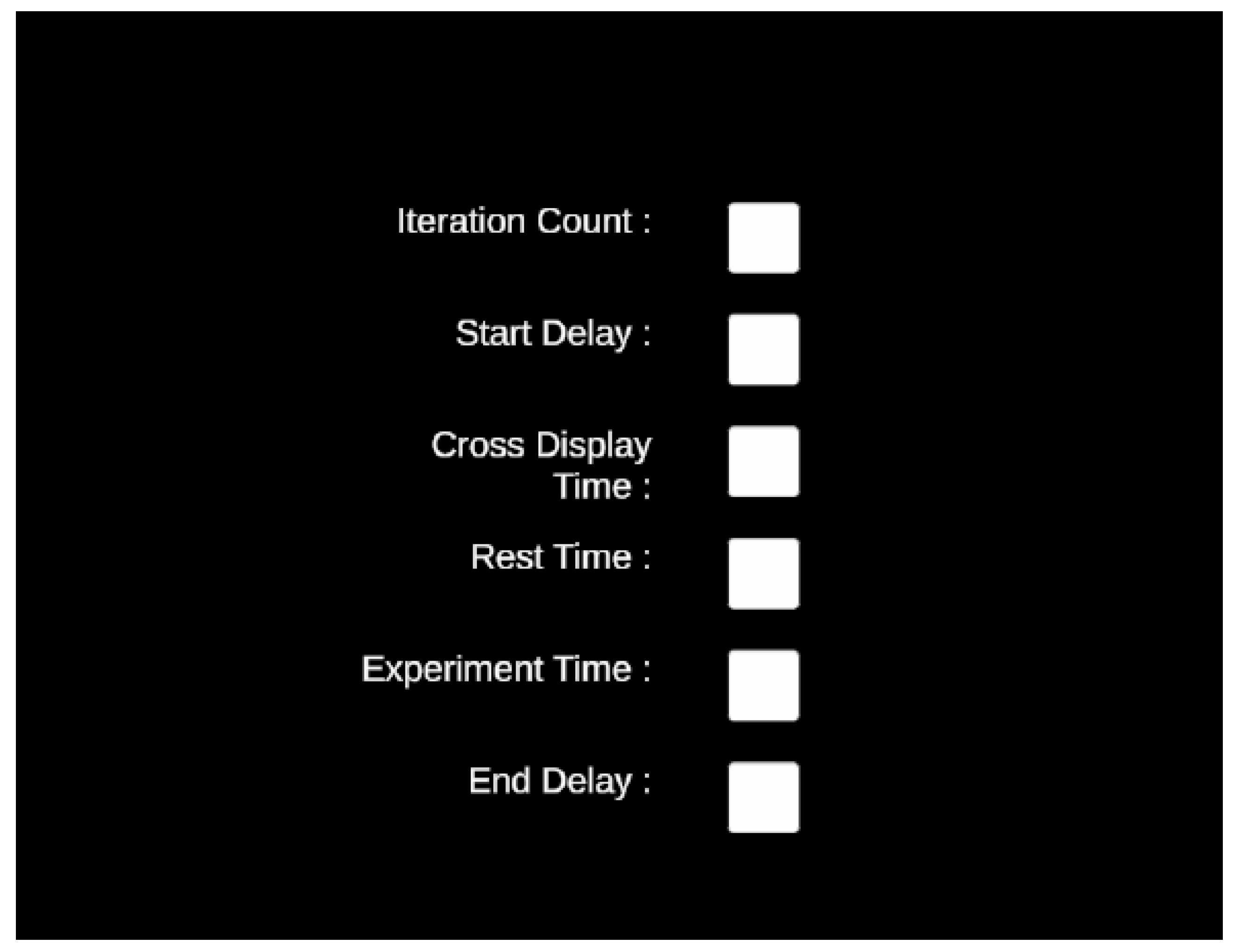
Figure 3.
Visual stimuli were shown to participants to prompt imagined motor execution, respectively [38].
Figure 3.
Visual stimuli were shown to participants to prompt imagined motor execution, respectively [38].
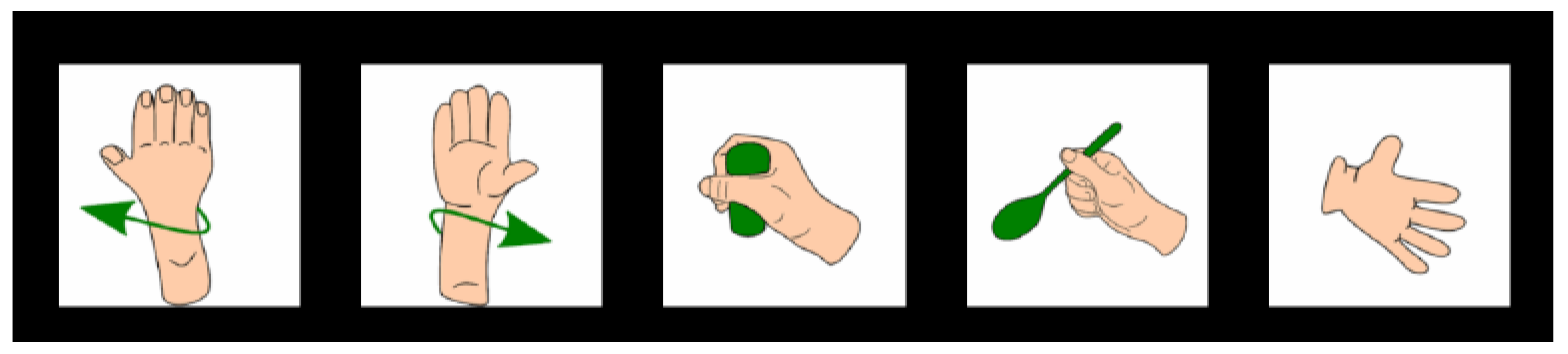
Figure 4.
Flow diagram of the EEG experimental protocol. Each trial begins with a start delay followed by a fixation cross display to direct participant focus. A rest period is then introduced before the motor imagery stimulus (i.e., hand movement) is shown. After the participant imagines the movement, another rest period is initiated. Finally, an end delay marks the conclusion of the iteration with an exit message.
Figure 4.
Flow diagram of the EEG experimental protocol. Each trial begins with a start delay followed by a fixation cross display to direct participant focus. A rest period is then introduced before the motor imagery stimulus (i.e., hand movement) is shown. After the participant imagines the movement, another rest period is initiated. Finally, an end delay marks the conclusion of the iteration with an exit message.
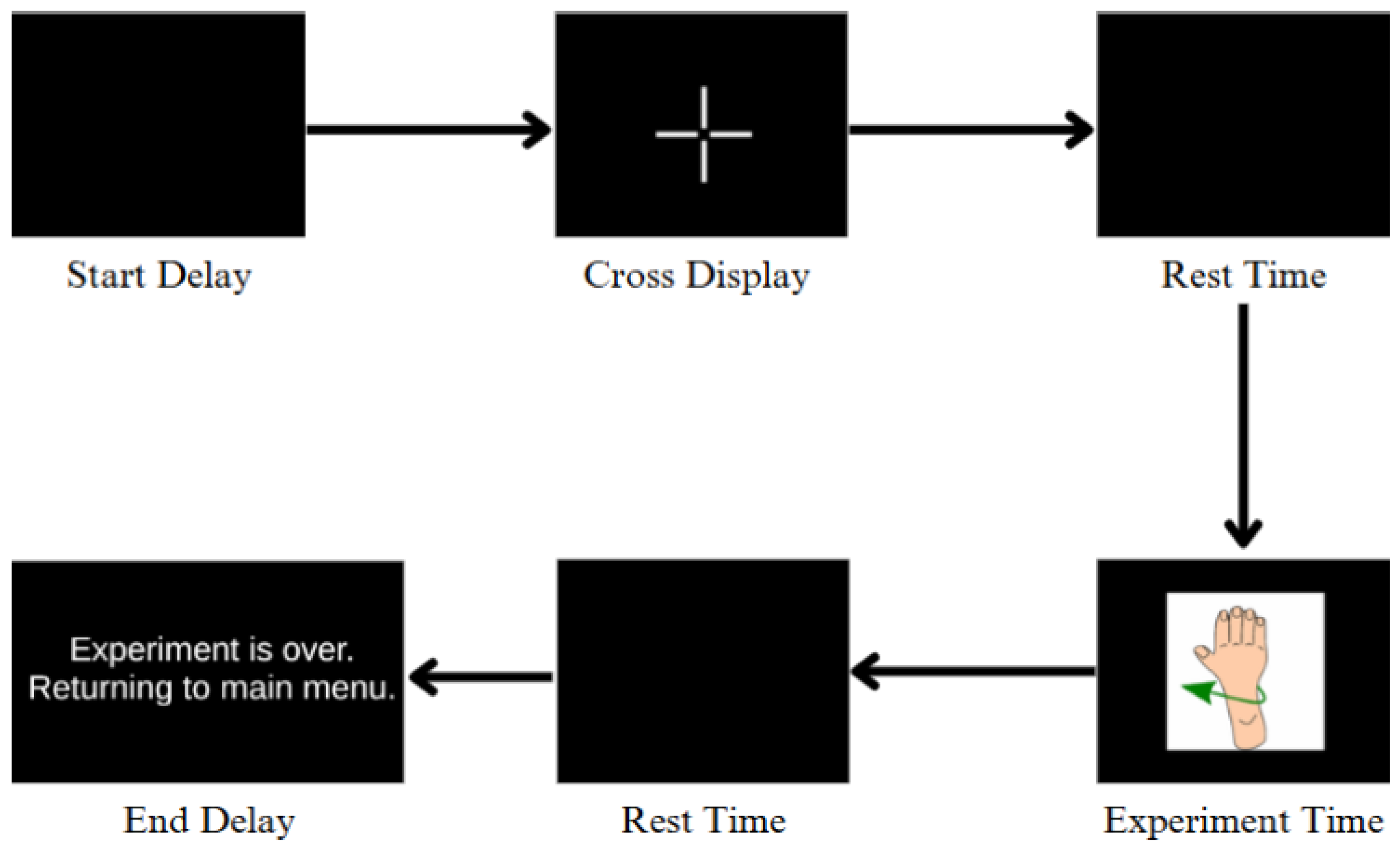
Figure 5.
Workflow of the classification pipeline implemented in Orange Data Mining software. Raw EEG datasets are imported and preprocessed through individual Data Table modules, then concatenated into a unified dataset. Manifold learning methods are applied for dimensionality reduction, followed by classification using k-Nearest Neighbors (kNN), Support Vector Machine (SVM), and Naive Bayes classifiers. The final evaluation is performed using the Test and Score module.
Figure 5.
Workflow of the classification pipeline implemented in Orange Data Mining software. Raw EEG datasets are imported and preprocessed through individual Data Table modules, then concatenated into a unified dataset. Manifold learning methods are applied for dimensionality reduction, followed by classification using k-Nearest Neighbors (kNN), Support Vector Machine (SVM), and Naive Bayes classifiers. The final evaluation is performed using the Test and Score module.
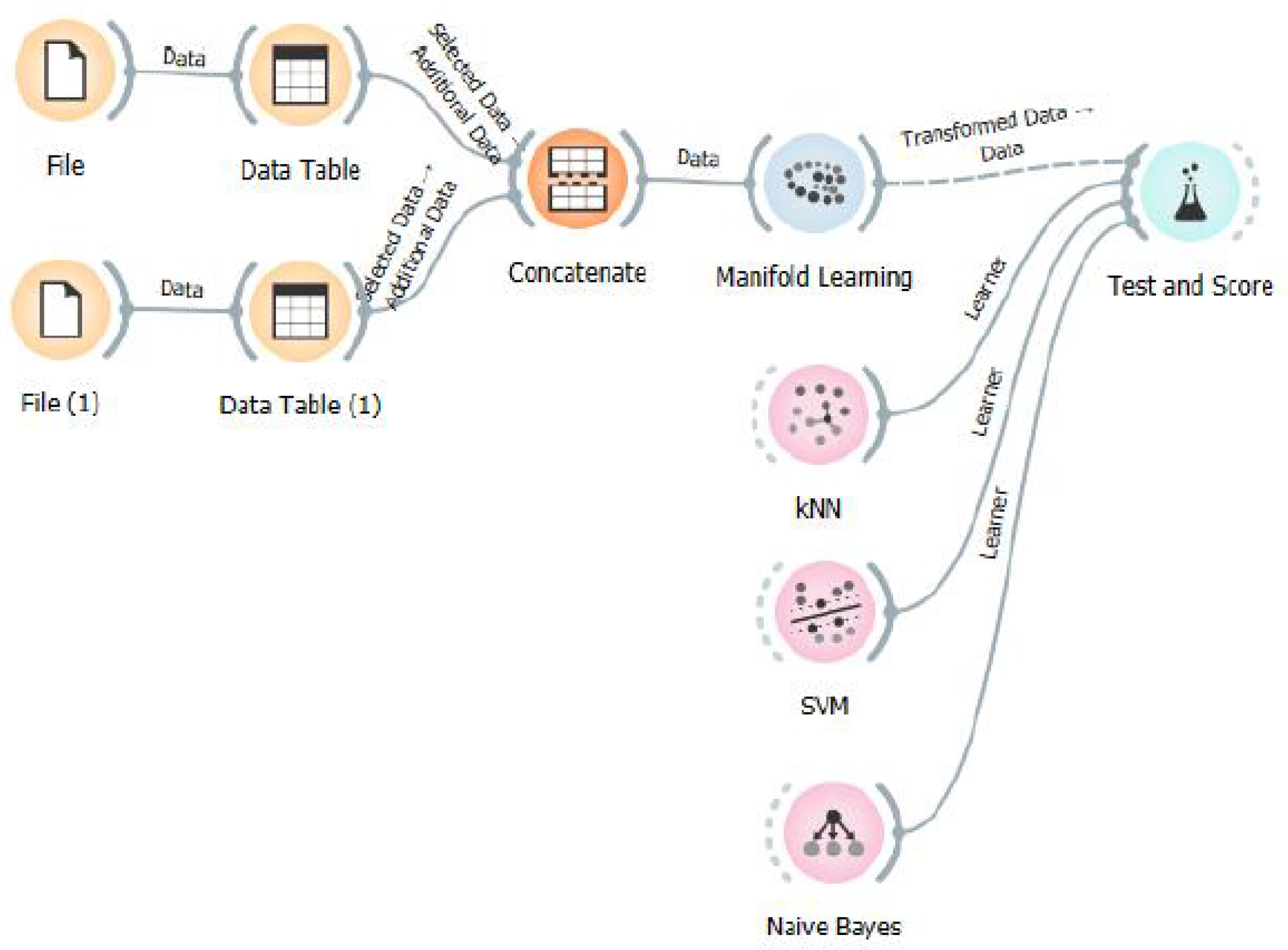
Figure 6.
Classification accuracy of manifold learning methods using binary classifiers
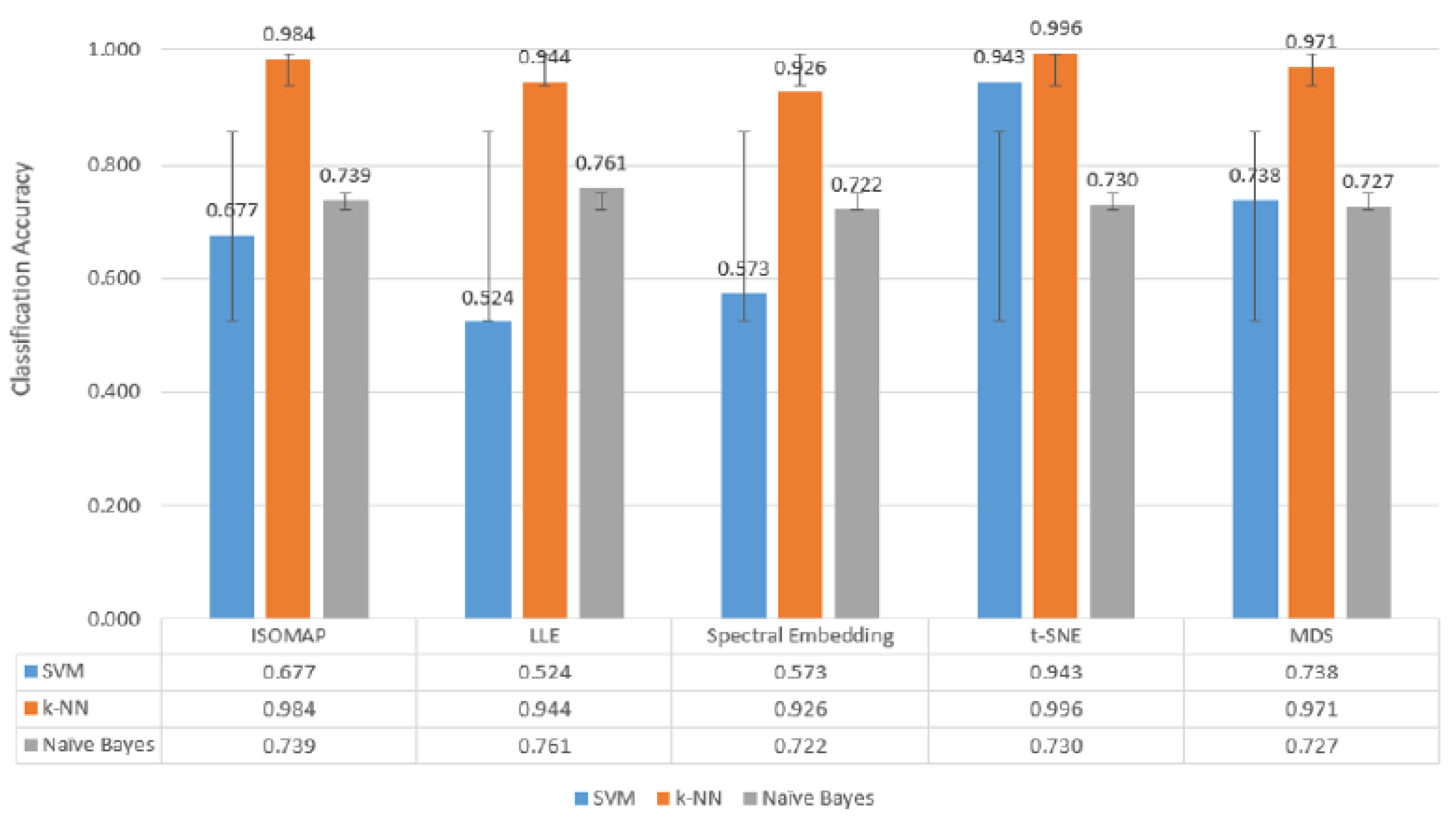
Figure 7.
Classification accuracy of manifold learning methods using ternary classifiers
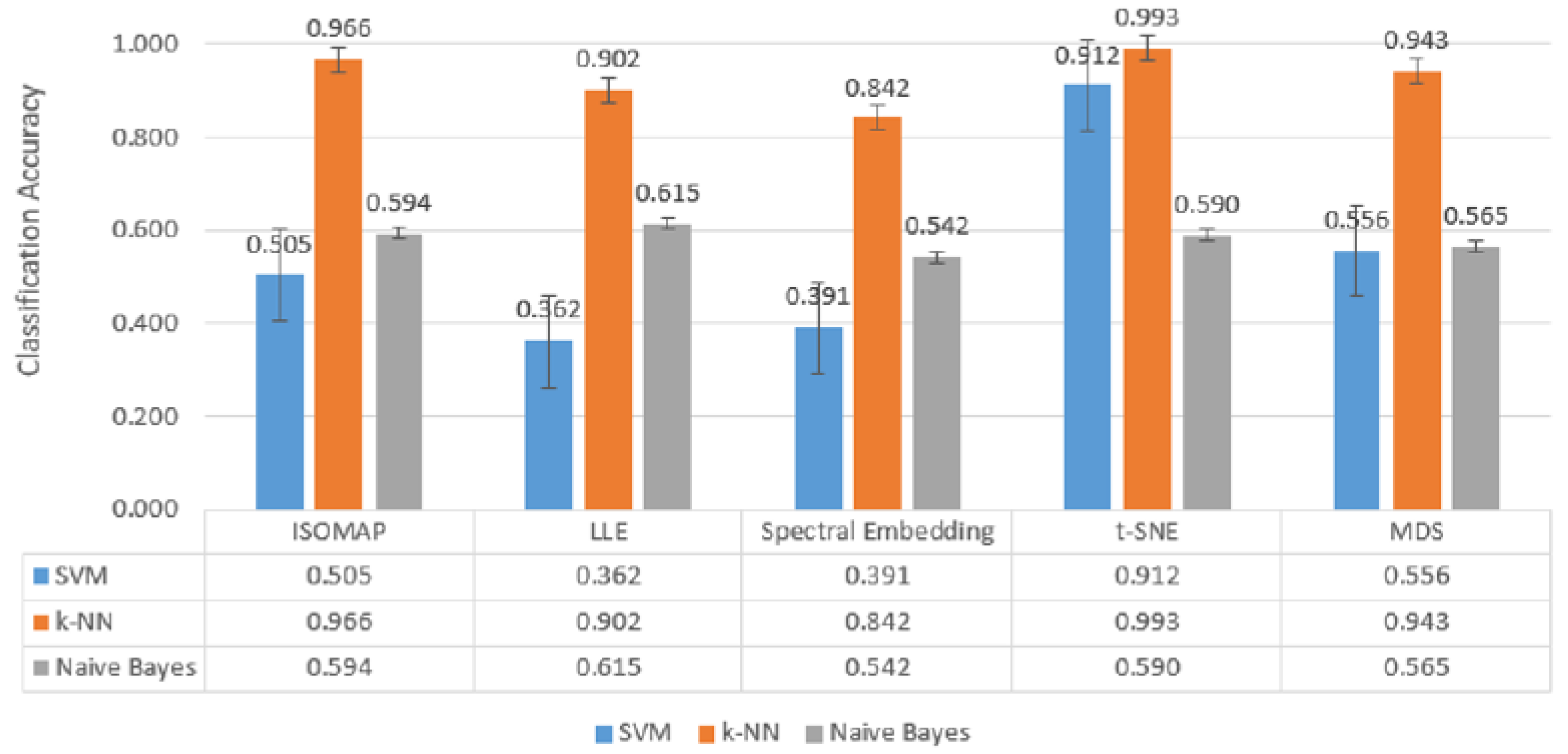
Figure 8.
Classification accuracy of manifold learning methods using five-class classifiers
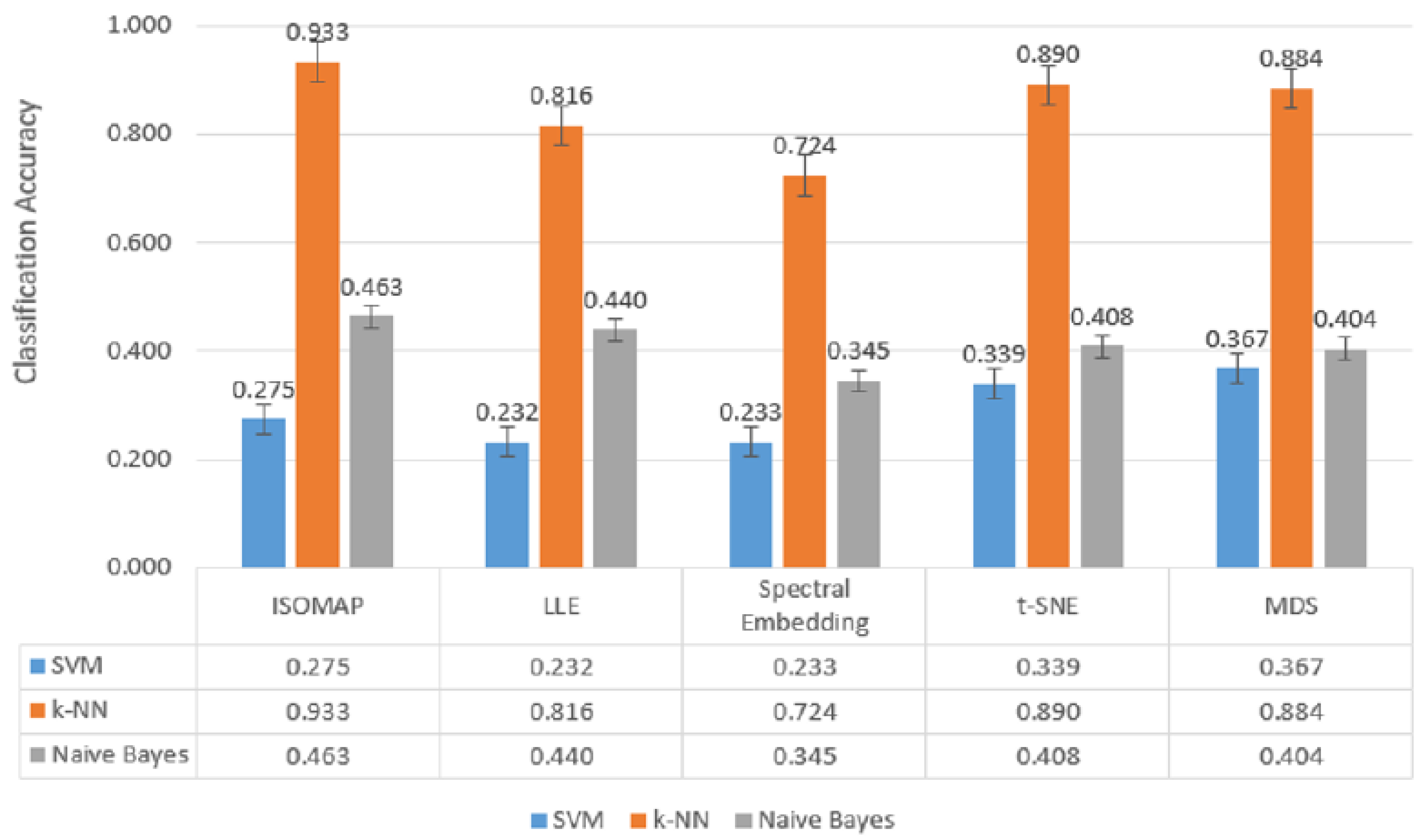
Figure 11.
Classification Accuracy of 5-Class for Manifold Learning Methods
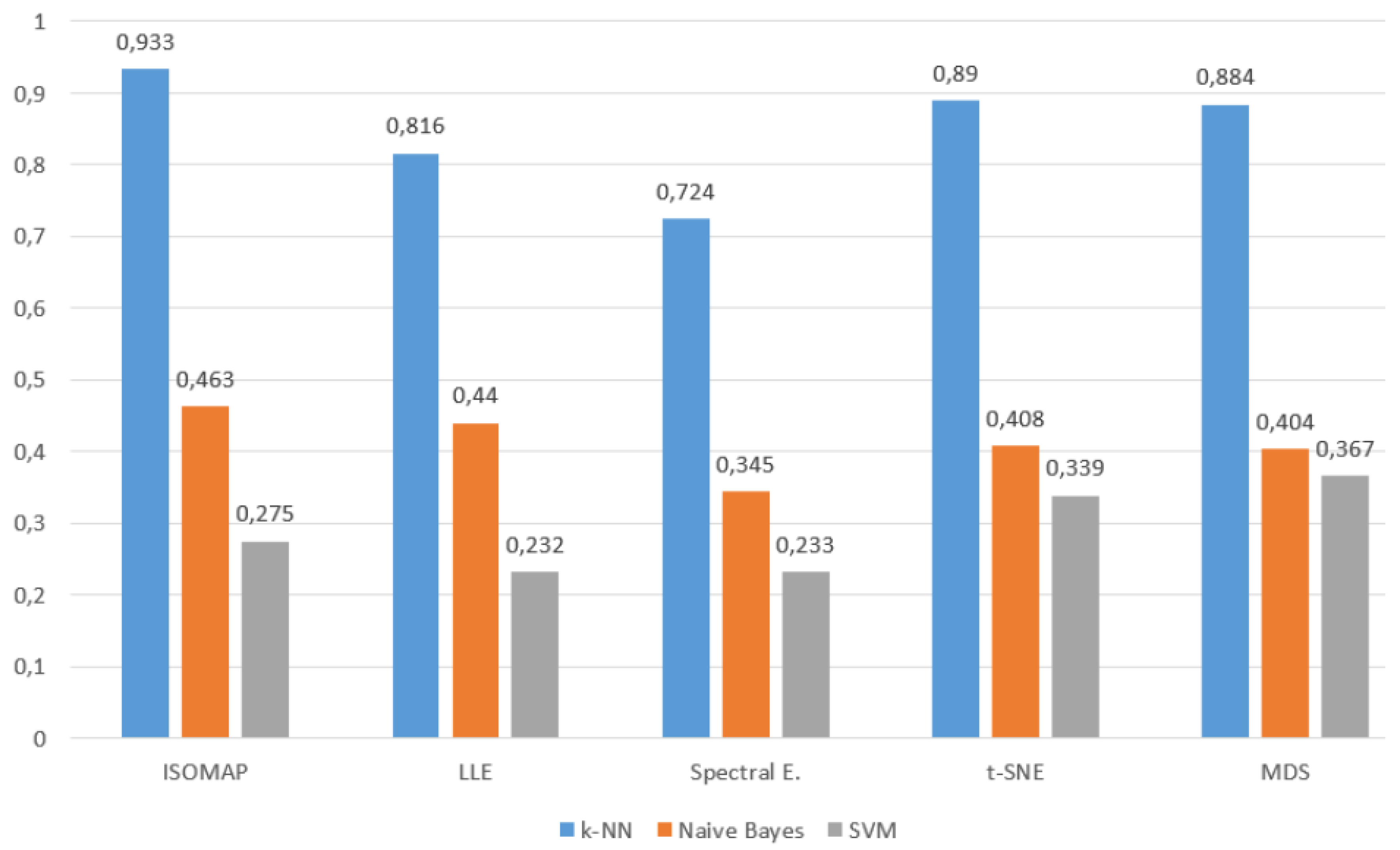
Table 1.
Subject Information
| Subject No | Gender | Age | Dominant Hand | Tested Hand |
|---|---|---|---|---|
| Subject 1 | Male | 20 | Right | Right |
| Subject 2 | Male | 20 | Right | Right |
| Subject 3 | Male | 24 | Left | Right |
| Subject 4 | Male | 18 | Right | Right |
| Subject 5 | Male | 27 | Right | Right |
| Subject 6 | Male | 25 | Right | Right |
Table 2.
ISOMAP-Based Classification Results Across 2-, 3-, and 5-Class
| 2-class | 3-class | 5-class | ||||||||||
| AUC | CA | F1 | Prec | AUC | CA | F1 | Prec | AUC | CA | F1 | Prec | |
| SVM | 0.732 | 0.677 | 0.685 | 0.696 | 0.716 | 0.505 | 0.493 | 0.514 | 0.660 | 0.275 | 0.265 | 0.286 |
| k-NN | 0.995 | 0.984 | 0.979 | 0.984 | 0.993 | 0.966 | 0.948 | 0.964 | 0.986 | 0.933 | 0.933 | 0.933 |
| Naive Bayes | 0.792 | 0.739 | 0.737 | 0.741 | 0.769 | 0.594 | 0.590 | 0.596 | 0.754 | 0.463 | 0.452 | 0.459 |
Table 3.
LLE-Based Classification Results Across 2-, 3-, and 5-Class
| 2-class | 3-class | 5-class | ||||||||||
| AUC | CA | F1 | Prec | AUC | CA | F1 | Prec | AUC | CA | F1 | Prec | |
| SVM | 0.479 | 0.524 | 0.479 | 0.510 | 0.474 | 0.362 | 0.479 | 0.363 | 0.558 | 0.232 | 0.178 | 0.227 |
| k-NN | 0.963 | 0.944 | 0.943 | 0.943 | 0.952 | 0.902 | 0.943 | 0.896 | 0.941 | 0.816 | 0.815 | 0.818 |
| Naive Bayes | 0.829 | 0.761 | 0.760 | 0.766 | 0.786 | 0.615 | 0.760 | 0.613 | 0.756 | 0.440 | 0.421 | 0.435 |
Table 4.
Spectral Embedding-Based Classification Results Across 2-, 3-, and 5-Class
| 2-class | 3-class | 5-class | ||||||||||
| AUC | CA | F1 | Prec | AUC | CA | F1 | Prec | AUC | CA | F1 | Prec | |
| SVM | 0.557 | 0.573 | 0.557 | 0.563 | 0.960 | 0.391 | 0.365 | 0.396 | 0.550 | 0.233 | 0.203 | 0.248 |
| k-NN | 0.960 | 0.926 | 0.915 | 0.925 | 0.938 | 0.842 | 0.847 | 0.834 | 0.903 | 0.724 | 0.721 | 0.723 |
| Naive Bayes | 0.769 | 0.722 | 0.718 | 0.725 | 0.719 | 0.542 | 0.532 | 0.544 | 0.679 | 0.345 | 0.314 | 0.328 |
Table 5.
t-SNE-Based Classification Results Across 2-, 3-, and 5-Class
| 2-class | 3-class | 5-class | ||||||||||
| AUC | CA | F1 | Prec | AUC | CA | F1 | Prec | AUC | CA | F1 | Prec | |
| SVM | 0.950 | 0.943 | 0.939 | 0.939 | 0.954 | 0.912 | 0.911 | 0.914 | 0.619 | 0.339 | 0.323 | 0.335 |
| k-NN | 0.992 | 0.996 | 0.996 | 0.996 | 0.999 | 0.993 | 0.993 | 0.993 | 0.975 | 0.890 | 0.890 | 0.891 |
| Naive Bayes | 0.795 | 0.730 | 0.728 | 0.730 | 0.768 | 0.590 | 0.586 | 0.589 | 0.733 | 0.408 | 0.394 | 0.406 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



