
Submitted:
16 June 2025
Posted:
17 June 2025
You are already at the latest version
Abstract
Accurate gait assessment is essential for managing pathological locomotion, especially in elderly patients recovering from hip joint surgeries. Wearable inertial sensor systems provide real-time, objective gait analysis in clinical settings. This study presents data on pelvic oscillation in the sagittal, frontal, and transverse planes, recorded via inertial measurement units during gait with and without assistive devices. We examined two groups: Group A (n=15, patients over 65 with osteosynthesis metallica) and Group B (n=34, patients over 65 with arthroplasty). Initial results showed the greatest deviations from normal (90–100%) in the frontal plane for both groups (46,4% and 52,6%), indicating pelvic asymmetry. In the transverse plane, Group A demonstrated the lowest values (47,7%) due to pain and compensatory mechanics. At the end of the observation period, significant improvements were found in all planes, particularly in the frontal plane (75,2% and 72,2%, p=0,001), though values remained below normal. Improvements were more substantial during unassisted walking, indicating increased pelvic control. These findings support the utility of inertial sensors in detecting subtle gait dysfunctions and monitoring recovery. Their use enables individualized rehabilitation strategies and represents a modern approach to gait analysis in orthopedic patients.
Keywords:
Inertial measurement units (IMUs)
; pelvic oscillation
; gait analysis
; hip joint
; recovery
1. Introduction
The ability of living organisms to move through their environment is fundamental to survival – a process scientifically referred to as locomotion. In humans, walking represents the primary and most natural form of locomotion. It is a highly coordinated motor act that allows the body to navigate physical space. Early humans depended on this function to gather resources and transport them to favorable living environments [1]. Later studies established that upright posture and bipedal locomotion evolved primarily to optimize energy efficiency during movement. Walking is considered automated motor behavior, characterized by economical muscle activation patterns and efficient mechanical movement. This efficiency is largely supported by the ventral inertial momentum of the body’s center of mass (COM) [2].
In recent years, the analysis of human gait has garnered significant scientific attention. Research in this domain aims to provide quantitative and objective measurements of gait parameters, with applications spanning sports science, rehabilitation medicine, geriatrics, and even forensic identification. From a kinesiological standpoint, gait is defined as the translational displacement of the body through the environment, achieved via coordinated rotational movements of the joints [3]. The entire musculoskeletal system is engaged, with the lower limbs performing the majority of the motor activity [4]. Notably, human gait is highly individualized – often referred to as a biomechanical “fingerprint.” Gait abnormalities are most frequently observed in individuals with neurological disorders affecting the central or peripheral motor neurons. These impairments disrupt muscle tone, balance, proprioception, and coordination, and manifest in characteristic ways across different pathologies. For instance, post-stroke hemiparesis often presents with a Wernicke-Mann gait; multiple sclerosis is associated with spastic gait; and Parkinson’s disease leads to the hallmark shuffling, festinating gait. Spastic diplegic gait is commonly seen in cerebral palsy (Morbus Little), while spinal cord injuries result in paraplegic gait patterns. Peripheral nerve damage can produce a flaccid or steppage gait. When the cerebellum or vestibular system is affected – as in tumors, inner ear disorders, or cerebellar degeneration – ataxic gait patterns emerge. In hemiataxia, where only one cerebellar hemisphere is impaired, patients may veer toward the affected side. A distinctive example is the spastic-ataxic gait in multiple sclerosis, indicating combined pyramidal and cerebellar involvement. These patients often exhibit stiff, slow movements with extended lower limbs, and many eventually lose ambulatory function. Tabetic gait, caused by neurosyphilis or dorsal column dysfunction, is marked by a loss of proprioception and awareness of limb positioning. Among ataxic patterns, the so-called staggering gait resembles that of an intoxicated individual, with exaggerated lateral deviations and corrective swaying. Astasia-abasia, seen in frontal lobe lesions, features a paradoxical inability to stand or walk despite intact supine motor function. Psychogenic disorders can result in hysterical gait, where patients simulate impairments in the absence of actual deficits. Parkinsonian gait is notable for static tremor, bradykinesia, rigidity, reduced arm swing, and forward-leaning posture. Affected individuals move with short, shuffling steps, often propelled by inertia, and are at increased risk of falling. Traumatic injuries of the lower extremities also significantly compromise gait. These include fractures of the femur, knee, tibia, and ankle; ligamentous injuries requiring reconstructive surgery; and joint replacements due to osteoarthritis. In addition, systemic diseases such as rheumatoid arthritis, diabetes, and certain cardiovascular or respiratory conditions can reduce functional independence. Age-related degenerative changes also contribute to gait decline in the elderly, representing a substantial portion of the population with locomotor limitations. Accurate and objective analysis of gait parameters is essential for early diagnosis, monitoring of disease progression, prevention of complications, and the development of individualized treatment plans [5].
In clinical and research contexts, gait analysis methods are broadly categorized into traditional and modern techniques. Traditional gait assessment relies on observational analysis. Clinicians evaluate a patient’s gait through visual inspection, ideally without the patient’s awareness, to infer the underlying cause, whether neurological or orthopedic. While practical and widely used, this approach is inherently semi-subjective. In contrast, modern technologies have enabled more precise and objective measurement of gait parameters [6].
Contemporary gait analysis devices fall into three main categories: non-wearable sensor (NWS) systems, wearable sensor (WS) systems, and hybrid systems that combine elements of both. Non-wearable sensor systems are designed for use in controlled laboratory environments, where fixed sensors collect data as subjects walk along predefined paths [7]. These systems are divided into two main types: image-processing (IP) systems and floor-sensor (FS) systems. IP systems employ digital or analog cameras, often using infrared, laser range scanning (LRS) or time-of-flight (ToF) technologies to capture motion. Through techniques such as pixel filtering, thresholding, and background subtraction, they enable real-time analysis of gait via depth and distance measurements. FS systems use pressure-sensitive platforms embedded in the floor to measure ground reaction forces and pressure distribution [6,7]. These platforms record the magnitude and timing of forces applied during the stance phase, offering granular insight into the biomechanics of gait. Advanced FS systems feature high-resolution sensor matrices, capable of differentiating pressure across discrete regions of the foot. NWS systems are lauded for their high accuracy and reliability [8]. However, several barriers limit their routine clinical application. These include substantial cost, complex technical setup, and spatial demands that necessitate dedicated laboratory infrastructure. Installation and calibration often require skilled technicians, increasing time and resource expenditure. Moreover, their non-portable nature renders them impractical for real-time monitoring in naturalistic or home environments – particularly for patients with mobility limitations. Despite these limitations, the detailed biomechanical data provided by NWS systems make them indispensable in high-precision research and diagnostic settings [9].
Wearable sensor systems represent a transformative innovation in gait analysis by facilitating data collection during everyday activities [10]. These portable devices incorporate various sensors such as accelerometers, gyroscopes, magnetometers, goniometers, ultrasound transducers, and electromyography (EMG) sensors, strategically placed on the body (e.g., feet, shanks, hips, or lower back) to measure physiological and biomechanical parameters [11]. Inertial measurement units (IMUs), which integrate accelerometers, gyroscopes and sometimes magnetometers are among the most widely adopted tools for gait analysis [6,7,11]. Accelerometers capture linear acceleration, while gyroscopes detect angular velocity and rotational displacement [12]. When fused, these components enable detailed 3D motion tracking, supporting the calculation of parameters such as step length, stride frequency, cadence and symmetry [13]. Goniometers, often built on strain gauge technology, measure joint angles during dynamic movement [14]. Ultrasound sensors can supplement spatial data acquisition by assessing parameters like step width and stride length [15]. Surface electromyography (EMG) provides valuable insight into muscle activation patterns by detecting the electrical activity generated by muscles during contraction. EMG is particularly useful for evaluating neuromuscular coordination, fatigue, and the timing of muscle recruitment during gait [16]. However, like goniometry and ultrasound, EMG typically requires controlled laboratory environments, fixed setups, and skilled personnel for accurate data acquisition and interpretation [6,14,15,16]. These constraints limit their applicability in real-world clinical settings or during routine rehabilitation assessments.
In contrast, wearable sensors provide a portable, accessible, and cost-effective alternative for gait and balance assessment [17]. These systems, commonly incorporating IMUs, include accelerometers, gyroscopes, and magnetometers that allow for three-dimensional motion capture in real-world environments. When strategically placed on anatomical landmarks such as the pelvis or lower limbs, WS enables continuous monitoring of dynamic activities without restricting natural movement (see Figure 1) [18].
The adoption of WS in clinical settings has expanded rapidly due to their ability to collect spatiotemporal gait parameters such as cadence, step length, gait speed, and stance-to-swing phase ratios. Additionally, parameters like pelvic symmetry, stride variability, and gait stability can also be derived, offering valuable insights into functional performance and recovery progression [19]. The principal advantages of WS include minimal setup time, ease of use, and the possibility for frequent, ecologically valid assessments. These features make WS especially useful for tracking functional improvements during rehabilitation in individuals with lower limb injuries, degenerative diseases, or post-surgical recovery. By enabling objective measurement and longitudinal monitoring, WS support data-driven clinical decisions and personalized therapeutic interventions [20]. Nevertheless, certain limitations remain. Measurement accuracy may be affected by sensor drift, soft tissue motion artifacts, or external interference, and the interpretation of the resulting data still requires clinical expertise in gait biomechanics. Despite these challenges, the role of WS in contemporary rehabilitation continues to grow, reinforcing their value as an essential tool for evaluating functional mobility and guiding recovery strategies [21].
Recent advancements in inertial sensor technology have significantly improved the accuracy and reliability of gait analysis. Modern systems now integrate multiple sensors with sophisticated algorithms, allowing for more precise motion tracking and data interpretation. These innovations have expanded the role of inertial sensors in personalized medicine by enabling tailored rehabilitation programs and offering predictive insights into functional recovery [22]. Given that independent walking is frequently compromised in individuals with lower limb trauma or pathology, often leading to reduced mobility, social isolation and diminished quality of life, there is a growing clinical need for accessible and objective methods to assess and monitor gait abnormalities [23]. This study was motivated by the need to establish a practical, clinically applicable methodology for gait assessment using wearable inertial sensor systems.
The aim of this study is to develop a methodological framework for kinesiological analysis using wearable inertial sensor systems and to demonstrate their clinical applicability in evaluating pathological gait in orthopedic patients. Through this approach, we hope to contribute to more personalized, effective, and widely accessible rehabilitation strategies.
2. Materials and Methods
Study Population
The study population consisted of patients who sought physiotherapeutic and rehabilitative treatment at University Hospital “Dr. G. Stranski” – Pleven, Bulgaria following trauma of the hip joint. The included patients were rehabilitated and examined at the Clinic of Physical and Rehabilitation Medicine (CPRM), both in the inpatient rehabilitation department and outpatient diagnostic-consultative center of the hospital. The sample included patients aged over 65 years who had undergone surgical intervention for hip fractures, either with osteosynthesis metallica (OM) (Group A, n=15) or arthroplasty (Group B, n=34). All patients used assistive devices, such as underarm crutches, during the rehabilitation period.
Study Design
This observational study employed a “before-after” design, with measurements taken at two time points: at the start of the rehabilitation period (first treatment course with assistive devices) and at the end of the observed period, defined as the time when patients were allowed full weight-bearing on the injured limb. The study duration spanned from July 2023 to December 2024. The observed period was shorter than the entire rehabilitation period, focusing specifically on the gait recovery process.
Gait Analysis Methodology
Gait parameters were recorded using the portable inertial sensor device G-WALK (BTS Bioengineering). The sensor was positioned at the pelvic region, centered approximately at the fifth lumbar vertebra (L5) or first sacral vertebra (S1). The device captured various gait parameters including gait speed, cadence, and step length. The primary focus of this study was on pelvic oscillations in the sagittal, frontal, and transverse planes, expressed as percentages relative to normal ranges (see Figure 2).
The gait analysis was performed in a clinical environment within the physical therapy ward of CPRM. Each patient was briefed on the procedure and gave informed consent prior to testing. The examination began with a brief anamnesis and review of medical documentation, followed by anthropometric measurements (including limb circumferences and joint range of motion) recorded in an individual patient file.
Patients were registered in the G-WALK software database with their anthropometric data, age, sex, and diagnosis. The sensor was calibrated via Bluetooth connection to a laptop. Patients walked a straight, 10-meter corridor at a self-selected comfortable speed, free from obstacles. Data collected during each gait trial were stored within the device software and documented in the individual patient file.
Statistical Analysis
Data was analyzed using SPSS software. Descriptive statistics including mean, standard deviation (SD), coefficient of variation (Cv%), standard error, and 95% confidence intervals (CI) were calculated. Comparative analysis of pre- and post-rehabilitation measurements was conducted using paired t-tests to assess the significance of changes in gait parameters.
Ethics Approval and Consent to Participate
The research protocol was reviewed and approved by the Ethics Committee of the Medical University – Pleven, in accordance with the ethical principles outlined in the Declaration of Helsinki. The study was conducted at the University Hospital “Dr. G. Stranski” – Pleven and adhered to the provisions of Ordinance No. 14 of 27.09.2007, which governs the conditions and procedures for conducting therapeutic and non-therapeutic scientific research involving human subjects in Bulgaria.
All participants received detailed information about the purpose and procedures of the study and provided written informed consent prior to enrollment. Consent was obtained using a standardized clinical consent form, ensuring that participants were fully informed about their involvement in the research.
Data Availability
The data supporting the findings of this study are stored securely on the hospital’s computer system and are not publicly available due to privacy and institutional restrictions. Data can be made available from the corresponding author upon reasonable request.
Generative AI Use
Generative artificial intelligence (ChatGPT) was used to assist with language editing and formatting of the manuscript. All scientific content was reviewed and validated by the authors.
3. Results
This section presents the outcomes of the rehabilitation process in elderly patients with hip joint trauma, comparing key gait parameters recorded at two time points: during ambulation with assistive devices and after transitioning to independent walking without aids. Patients were divided into two groups – those who underwent osteosynthesis (Group A) and those who received hip arthroplasty (Group B). The results focus on pelvic motion in the sagittal, frontal and transverse planes, offering objective insight into postural control and gait recovery throughout the rehabilitation process.
Figure 3, Figure 4 and Figure 5 present illustrative diagrams of pelvic kinematics across the three anatomical planes – sagittal (S), frontal (F), and transverse (T) highlighting the typical directions and amplitudes of pelvic motion observed during walking. These schematic representations serve as visual aids to better comprehend the complex, multidimensional oscillations of the pelvis that are crucial for maintaining balance and efficient gait mechanics. Each diagram emphasizes key movement components such as anterior-posterior tilt in the sagittal plane, lateral tilt in the frontal plane and rotational motion in the transverse plane. Although these figures are schematic rather than direct patient recordings, they correspond closely to the parameters quantitatively assessed in this study using the G-WALK inertial sensor system. By providing a clear visualization of pelvic movement patterns, these diagrams facilitate interpretation of the gait data and support understanding of the biomechanical adaptations occurring throughout the rehabilitation process.
3.1. Analysis of Pelvic Oscillation in the Sagittal Plane
The statistical data on pelvic oscillation in the S plane, expressed as percentages (%), are summarized in Table 1. The normal reference range for this parameter is between 90% and 100%. Values were recorded at two time points – at the beginning and at the end of the study period for both patient groups: Group A (OM) and Group B (arthroplasty).
As shown in Table 1, Group A exhibited a modest increase in pelvic oscillation values in the S plane, rising from 68,8% to 71,1% by the end of the rehabilitation period. In contrast, Group B demonstrated a slight decrease from 76,4% to 69,1%. However, the changes in both groups were not statistically significant (p = 0,313 for Group A; p = 0,065 for Group B). These findings reflect variable responses to rehabilitation, with Group A showing gradual progress and Group B exhibiting minor regression, possibly due to differences in surgical intervention or recovery dynamics. Figure 6 illustrates these trends by comparing average pelvic motion values at both time points. Despite the lack of statistical significance, such changes underscore the importance of continuous monitoring and individualized rehabilitation strategies, particularly in elderly patients recovering from hip trauma. Further investigation with a longer follow-up period may help clarify whether these patterns persist or stabilize over time. It is also possible that external factors such as post-operative pain, muscle weakness, or fear of movement may have influenced pelvic control during walking. Identifying such factors could improve rehabilitation planning and enhance gait restoration outcomes.
3.2. Analysis of Pelvic Oscillation in the Frontal Plane
The statistical data on pelvic oscillation in the F plane, expressed as a percentage (%) relative to the normal reference range of 90–100%, are presented in Table 2. These values were recorded at two time points during the rehabilitation period – initially during ambulation with assistive devices and later during independent walking across both study groups.
As shown in the table, both groups demonstrated significant improvement in F plane pelvic motion over the course of rehabilitation. Group A showed a marked increase from 46,4% at the initial assessment to 75,2% at the final time point (p = 0,001), indicating enhanced lateral stability and improved postural control. Similarly, Group B improved from 52,6% to 72,2%, also reaching statistical significance (p = 0,001). These results suggest that rehabilitation interventions led to meaningful gains in frontal plane control in both osteosynthesis and arthroplasty patients (see Figure 7). While neither group reached the lower limit of the normal reference range, the progress reflects a substantial reduction in lateral instability during gait. Improvements in this plane are particularly relevant, as lateral pelvic control is crucial for safe ambulation and fall prevention. The findings reinforce the clinical relevance of targeting frontal plane mechanics during rehabilitation, especially in elderly patients recovering from hip trauma. The consistent improvement observed in both groups underscores the effectiveness of tailored rehabilitation programs in restoring pelvic mobility.
3.3. Analysis of Pelvic Oscillation in the Transverse Plane
The statistical data on pelvic oscillation in the T plane, expressed as a percentage (%) relative to the normal reference range of 90–100%, are presented in Table 3. These values were recorded at two time points during the rehabilitation period – initially while walking with assistive devices and subsequently during independent walking for both study groups.
Table 3 also presents the mean values of pelvic oscillation in the T plane for both groups at the beginning and end of the rehabilitation period. Group A demonstrated the greatest progression among all planes, with mean oscillation values increasing significantly from 47,7% to 80,2% (p = 0,001). Group B showed a moderate increase from 73,0% to 80,5%; however, this change did not reach statistical significance (p = 0,068). The pronounced improvement in Group A may be attributed to postoperative pain, which often leads to compensatory pelvic movements as patients adapt their gait to minimize discomfort. In contrast, patients in Group B, who received hip arthroplasty, generally experience less pain due to the artificial joint, resulting in less initial compensation via pelvic motion. This difference likely explains the higher baseline pelvic oscillation in Group B and the smaller, less significant increase over time. The accompanying diagram (see Figure 8) illustrates the mean pelvic oscillation values in the transverse plane at both time points for Groups A and B, highlighting the distinct patterns of recovery observed.
Overall, the observed changes in pelvic oscillations across the S, F and T planes reveal meaningful patterns of gait recovery among patients following hip joint surgery. The inertial sensor-based gait analysis system (G-WALK) provided objective, quantitative measures of pelvic kinematics, allowing for precise monitoring of rehabilitation progress. While statistically significant improvements were most pronounced in the F plane, the data underscore the utility of wearable sensor technology in capturing subtle biomechanical changes during the transition from assisted to independent ambulation. These findings not only advance our understanding of postural control adaptations but also demonstrate the practical applications of portable inertial sensors in clinical rehabilitation settings. The following discussion will contextualize these results within the broader literature and consider implications for patient care and sensor-based assessment methodologies.
4. Discussion
This study examined the rehabilitation outcomes of elderly patients with hip joint trauma, employing a wearable inertial sensor system (BTS G-WALK) to objectively assess pelvic kinematics during gait. The use of this portable sensor technology allowed precise, real-time capture of spatiotemporal and kinematic gait parameters in clinical settings, demonstrating its potential as a valuable tool for monitoring functional recovery in rehabilitation [24].
Our findings showed positive trends in pelvic oscillations across the sagittal, frontal, and transverse planes during the progression from assisted walking with devices to independent ambulation. Significant improvements were particularly evident in the frontal plane for both osteosynthesis (Group A) and arthroplasty (Group B) patients, with Group A also exhibiting notable progression in the transverse plane. These results are consistent with prior studies emphasizing the importance of pelvic control in maintaining gait stability and efficiency following hip surgery [25,26]. The greater improvement observed in Group A’s transverse plane oscillations may reflect compensatory mechanisms associated with postoperative pain and joint preservation, whereas the relatively stable values in Group B align with their use of artificial joints, which tend to reduce pain and mechanical compensation.
The wearable inertial sensor system enabled a detailed analysis of three-dimensional pelvic movements, providing insights that are difficult to achieve with conventional gait analysis methods or subjective clinical evaluation alone. This highlights the growing relevance of wearable sensor technologies in rehabilitation medicine, as they facilitate objective quantification of complex movement patterns and enable continuous monitoring in diverse settings – ranging from clinical environments to patients’ homes [27,28]. Such capabilities are crucial for tailoring individualized rehabilitation programs and optimizing therapy outcomes.
While the improvements observed in the frontal and transverse planes were statistically significant or approaching significance, changes in the sagittal plane were less pronounced and did not reach significance within the study period. This variability underscores the multifactorial nature of gait recovery, influenced by factors including pain, muscle strength, joint integrity, and patient compliance. It also suggests that pelvic motion in the sagittal plane may require longer rehabilitation or additional therapeutic focus to achieve significant gains.
The integration of wearable sensors like the BTS G-WALK within rehabilitation protocols offers several advantages: non-invasiveness, portability, ease of use, and the ability to generate automated, quantitative reports. These features support clinicians in making informed decisions and tracking patient progress objectively over time. Moreover, the adoption of wearable sensor technology aligns with emerging trends in digital health and tele-rehabilitation, which have gained increasing importance, especially in contexts limiting frequent clinical visits [29].
Future research should investigate the longitudinal application of wearable sensor monitoring over extended rehabilitation periods and in larger patient populations. Incorporating machine learning algorithms could further enhance data interpretation, enabling predictive modeling and real-time adaptive feedback for patients. Additionally, correlating sensor-derived gait parameters with patient-reported outcome measures would provide a holistic view of recovery, integrating objective data with subjective experience.
In summary, this study demonstrates that wearable inertial sensors provide a robust and practical approach for assessing gait and pelvic kinematics during rehabilitation following hip trauma. By facilitating detailed, objective movement analysis, these technologies have the potential to revolutionize rehabilitation assessment and contribute to more effective, personalized treatment strategies in musculoskeletal care.
5. Conclusions
This study demonstrated the valuable application of wearable inertial sensor technology in objectively assessing pelvic kinematics during gait rehabilitation in elderly patients following hip surgery. The use of the G-WALK sensor system enabled precise quantification of pelvic oscillations in the sagittal, frontal, and transverse planes at two critical time points – ambulation with assistive devices and independent walking without aids. Significant improvements in pelvic motion were observed, particularly in the frontal and transverse planes, reflecting enhanced postural control and gait recovery. Although changes in the sagittal plane were less pronounced, the overall trends suggest positive functional gains.
The portability, ease of use, and real-time data acquisition capabilities of the wearable sensor provided a comprehensive and clinically relevant evaluation that traditional gait assessment methods may lack. This technology facilitated detailed monitoring of subtle gait compensations and rehabilitation progress in a non-invasive, repeatable manner across clinical and ambulatory settings.
These findings underscore the potential of wearable inertial sensors to enhance individualized rehabilitation protocols by enabling objective, continuous, and quantitative gait analysis. Future research should focus on expanding the sample size, exploring long-term outcomes, and integrating sensor data with machine learning algorithms to further optimize patient-specific rehabilitation strategies. The integration of such advanced sensor technology into routine clinical practice holds promise for improving functional recovery and quality of life in patients with lower limb musculoskeletal impairments.
Author Contributions
Conceptualization, A.K.D. and D.E.V.; methodology, A.K.D.; software, A.K.D.; validation, A.K.D. and D.E.V.; formal analysis, D.E.V.; investigation, A.K.D.; resources, A.K.D.; data curation, A.K.D.; writing original draft preparation, A.K.D.; writing review and editing, D.E.V.; visualization, A.K.D.; supervision, D.E.V.; project administration, A.K.D. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Medical University – Pleven, Bulgaria, under research project № 5/2023, which provided support for the acquisition of the inertial sensor.
Institutional Review Board Statement
The study was conducted in accordance with the Declaration of Helsinki and approved by the Ethics Committee of the Medical University of Pleven. Approval was granted under institutional procedures related to project 5/2023.
Informed Consent Statement
Informed consent was obtained from all subjects involved in the study.
Data Availability Statement
The data presented in the study are available on request from the corresponding author. The data are not publicly available due to privacy and ethical restrictions.
Acknowledgments
The authors gratefully acknowledge the Medical University of Pleven for providing the inertial sensor equipment crucial to this research. We also extend our sincere thanks to the university staff for their valuable technical support during data collection. Special appreciation is given to the funding provided through MU-Pleven research project № 5/2023, which facilitated the acquisition of the G-WALK sensor system employed in this study. The present study is part of the doctoral dissertation recently defended by Atanas Drumev at the National Sports Academy “Vassil Levski” in Sofia. This research is supported by the Bulgarian Ministry of Education and Science under the national program "Young Scientists and Postdoctoral Students - 2." During the preparation of this manuscript, the authors used ChatGPT (GPT-4) for refining language and organization. The authors have reviewed and edited the output and take full responsibility for the content of this publication.
Conflicts of Interest
The author declares no conflicts of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| COM | Center of mass |
| CPRM | Clinic of Physical and Rehabilitation Medicine |
| EMG | Electromyography |
| F | Frontal |
| FS | Floor sensor |
| IP | Image processing |
| IMUs | Inertial measurement units |
| LRS | Laser range scanners |
| NWS | Non-wearable sensor |
| OM | Osteosynthesis metallica |
| S | Sagittal |
| T | Transverse |
| ToF | Time-of-flight |
| WS | Wearable sensor |
References
- Drumev, A.; Vacheva, D. Researching the Recovery of Locomotor Activity after Traumatic Conditions of the Lower Limb. J. Biomed. Clin. Res. 2025, 18, 33–46. [CrossRef]
- Neumann, D.A. Kinesiology of Gait, 3rd ed.; Elsevier: St. Louis, MO, USA, 2017.
- Lu, T.-W.; Chang, C.-F. Biomechanics of human movement and its clinical applications. Kaohsiung J. Med. Sci. 2012, 28, S13–S25. [CrossRef]
- Hall, S. J. Basic Biomechanics, 9th ed.; McGraw-Hill: New York, NY, USA, 2021.
- Vacheva, D. Medical Rehabilitation in Neurological and Psychiatric Disorders. Pleven: Publishing Center of the Medical University – Pleven, 2022. [in Bulgarian].
- Muro-de-la-Herran, A.; Garcia-Zapirain, B.; Mendez-Zorrilla, A. Gait Analysis Methods: An Overview of Wearable and Non-Wearable Systems, Highlighting Clinical Applications. Sensors 2014, 14, 3362–3394. [CrossRef]
- Godfrey, A.; Conway, R.; Meagher, D.; O’Laighin, G. Direct measurement of human movement by accelerometry. Med. Eng. Phys. 2008, 30, 1364–1386. [CrossRef]
- Hulleck, A. A.; Mohan, D. M.; Abdallah, N.; El Rich, M.; Khalaf, K. Present and Future of Gait Assessment in Clinical Practice: Towards the Application of Novel Trends and Technologies. Front. Med. Technol. 2022, 4, 901331. [CrossRef]
- Vargas, V.; Ramos, P.; Orbe, E.A.; Zapata, M.; Valencia-Aragón, K. Low-Cost Non-Wearable Fall Detection System Implemented on a Single Board Computer for People in Need of Care. Sensors 2024, 24(17), 5592. [CrossRef]
- Li, Q.; Young, M.; Naing, V.; Donelan, J. M. Walking speed estimation using a shank-mounted inertial measurement unit. J. Biomech. 2010, 43, 1640–1643. [CrossRef]
- Cho, Y.-S.; Jang, S.-H.; Cho, J.-S.; Kim, M.-J.; Lee, H. D.; Lee, S. Y.; Moon, S.-B. Evaluation of validity and reliability of inertial measurement unit-based gait analysis systems. Annals of Rehabilitation Medicine, 2020, 42(6), 872–883. [CrossRef]
- Schwesig, R.; Leuchte, S.; Fischer, D.; Ullmann, R.; Kluttig, A. Inertial Sensor-Based Reference Gait Data for Healthy Subjects. Gait Posture 2011, 33(4), 673–678. [CrossRef]
- Auvinet, B.; Berrut, G.; Touzard, C.; Moutel, L.; Collet, N.; Chaleil, D.; Barrey, E. Reference Data for Normal Subjects Obtained with an Accelerometric Device. Gait Posture 2002, 16(2), 124–134. [CrossRef]
- Gutiérrez-Martínez, J.; Ortiz-Espinosa, A.; Hernández-Rodríguez, P.R.; Núñez-Gaona, M.A. System to Measure the Range of Motion of the Joints of the Human Hand. Rev. Invest. Clin. 2014, 66 (Suppl 1), S122–S130.
- Mooijekind, B.; Flux, E.; Buizer, A.I.; van der Krogt, M.M.; Bar-On, L. The Influence of Wearing an Ultrasound Device on Gait in Children with Cerebral Palsy and Typically Developing Children. Gait Posture 2023, 101, 138–144. [CrossRef]
- Rawat, M.; Kostopoulos, D.; Rizopoulos, K.; Dodson, W.; Blair, K.; Henderson, J.; Grow, M.; Upreti, C. Impact of Electrodiagnostic (EMG/NCS) Tests on Clinical Decision-Making and Patient Perceived Benefit in the Outpatient Physical Therapy Practice. J. Bodyw. Mov. Ther. 2020, 24(1), 170–174. [CrossRef]
- Kotiadis, D.; Hermens, H.J.; Veltink, P.H. Inertial gait phase detection for control of a drop foot stimulator: Inertial sensing for gait phase detection. Med. Eng. Phys. 2010, 32, 287–297. [CrossRef]
- van Melzen, R.; Haveman, M.E.; Schuurmann, R.C.L.; Struys, M.M.R.F.; de Vries, J.-P.P.M. Implementing Wearable Sensors for Clinical Application at a Surgical Ward: Points to Consider before Starting. Sensors 2023, 23, 6736. [CrossRef]
- Valle, M.S.; Casabona, A.; Sapienza, I.; Laudani, L.; Vagnini, A.; Lanza, S.; Cioni, M. Use of a Single Wearable Sensor to Evaluate the Effects of Gait and Pelvis Asymmetries on the Components of the Timed Up and Go Test, in Persons with Unilateral Lower Limb Amputation. Sensors 2022, 22, 95. [CrossRef]
- Prasanth, H.; Caban, M.; Keller, U.; Courtine, G.; Ijspeert, A.; Vallery, H.; von Zitzewitz, J. Wearable Sensor-Based Real-Time Gait Detection: A Systematic Review. Sensors 2021, 21, 2727. [CrossRef]
- Hafer, J.F.; Vitali, R.; Gurchiek, R.; Curtze, C.; Shull, P.; Cain, S.M. Challenges and Advances in the Use of Wearable Sensors for Lower Extremity Biomechanics. J. Biomech. 2023, 157, 111714. [CrossRef]
- Tao, W.; Liu, T.; Zheng, R.; Feng, H. Gait Analysis Using Wearable Sensors. Sensors 2012, 12(2), 2255–2283. [CrossRef]
- Smith Fine, A.; Kaufman, M.; Goodman, J.; Turk, B.; Bastian, A.; Lin, D.; Fatemi, A.; Keller, J. Wearable Sensors Detect Impaired Gait and Coordination in LBSL during Remote Assessments. Ann. Clin. Transl. Neurol. 2022, 9(4), 468–477. [CrossRef]
- Kristoffersson, A.; Lindén, M. A Systematic Review of Wearable Sensors for Monitoring Physical Activity. Sensors 2022, 22(2), 573. [CrossRef]
- Lewek, M.D.; Bradley, C.; Wutzke, C. Pelvic motion during walking: Differences in individuals with total hip arthroplasty and healthy controls. Gait & Posture 2010, 32, 81–85. [CrossRef]
- Riener, R.; Rabuffetti, M.; Leardini, A. Quantifying compensatory pelvic kinematics in patients with hip and knee impairments. Clin. Biomech. 2021, 85, 105336. [CrossRef]
- Patel, S.; Park, H.; Bonato, P.; Chan, L.; Rodgers, M. A review of wearable sensors and systems with application in rehabilitation. J. NeuroEng. Rehabil. 2012, 9, 21. [CrossRef]
- Mannini, A.; Sabatini, A.M. Machine learning methods for classifying human physical activity from on-body accelerometers. Sensors 2012, 12, 1154–1175. [CrossRef]
- Chen, J.; Jin, W.; Zhang, X.-X.; Xu, W.; Liu, X.-N.; Ren, C.-C. Telerehabilitation Approaches for Stroke Patients: Systematic Review and Meta-analysis of Randomized Controlled Trials. J. Stroke Cerebrovasc. Dis. 2020, 29, 104984. [CrossRef]
Figure 1.
Illustrative visualization of gait analysis with WS technology.
Figure 2.
Example of gait analysis output using the BTS G-WALK sensor system (BTS Bioengineering, Italy) in a post-injury patient.
Figure 2.
Example of gait analysis output using the BTS G-WALK sensor system (BTS Bioengineering, Italy) in a post-injury patient.
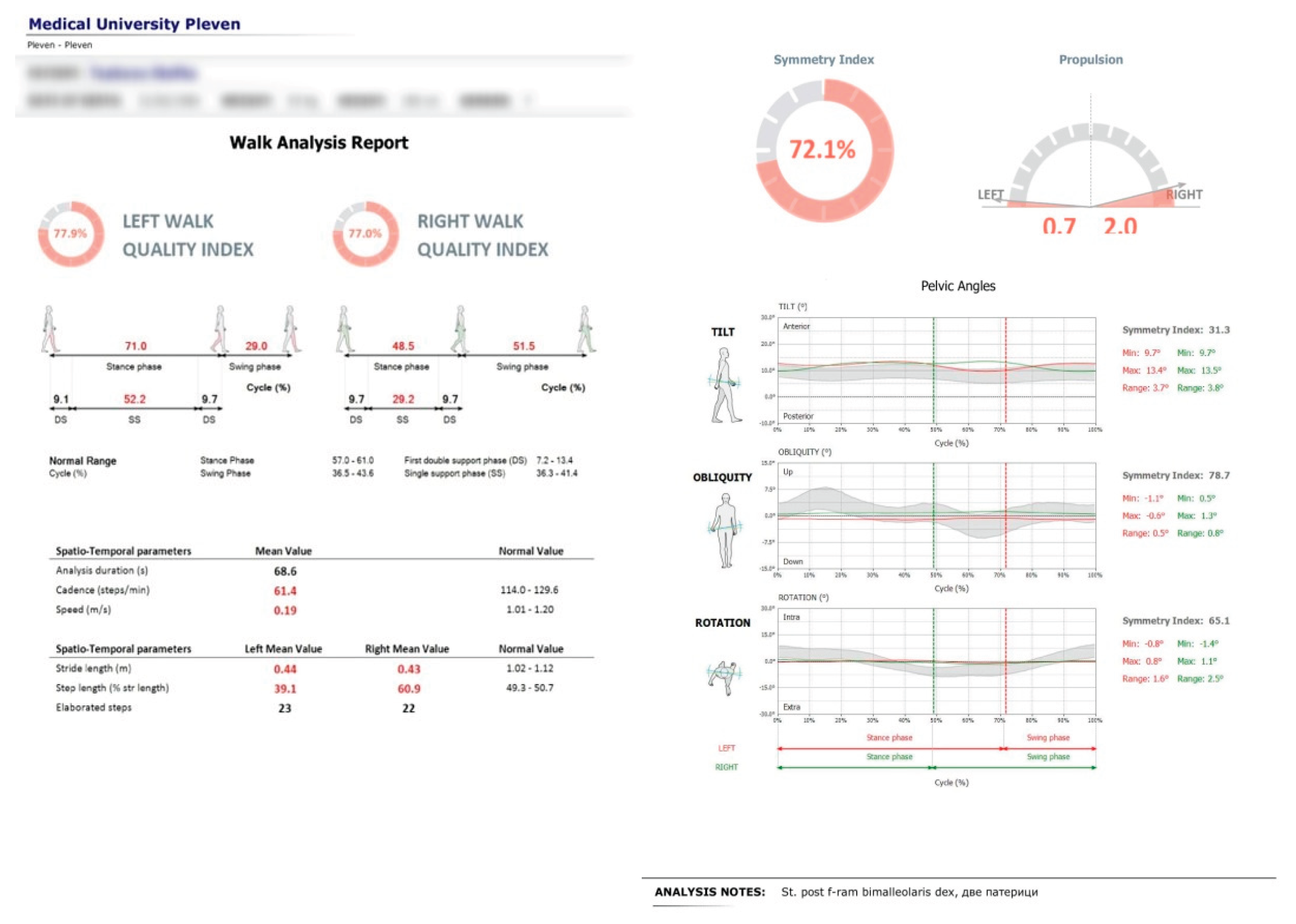
Figure 3.
Pelvic oscillation – S plane.
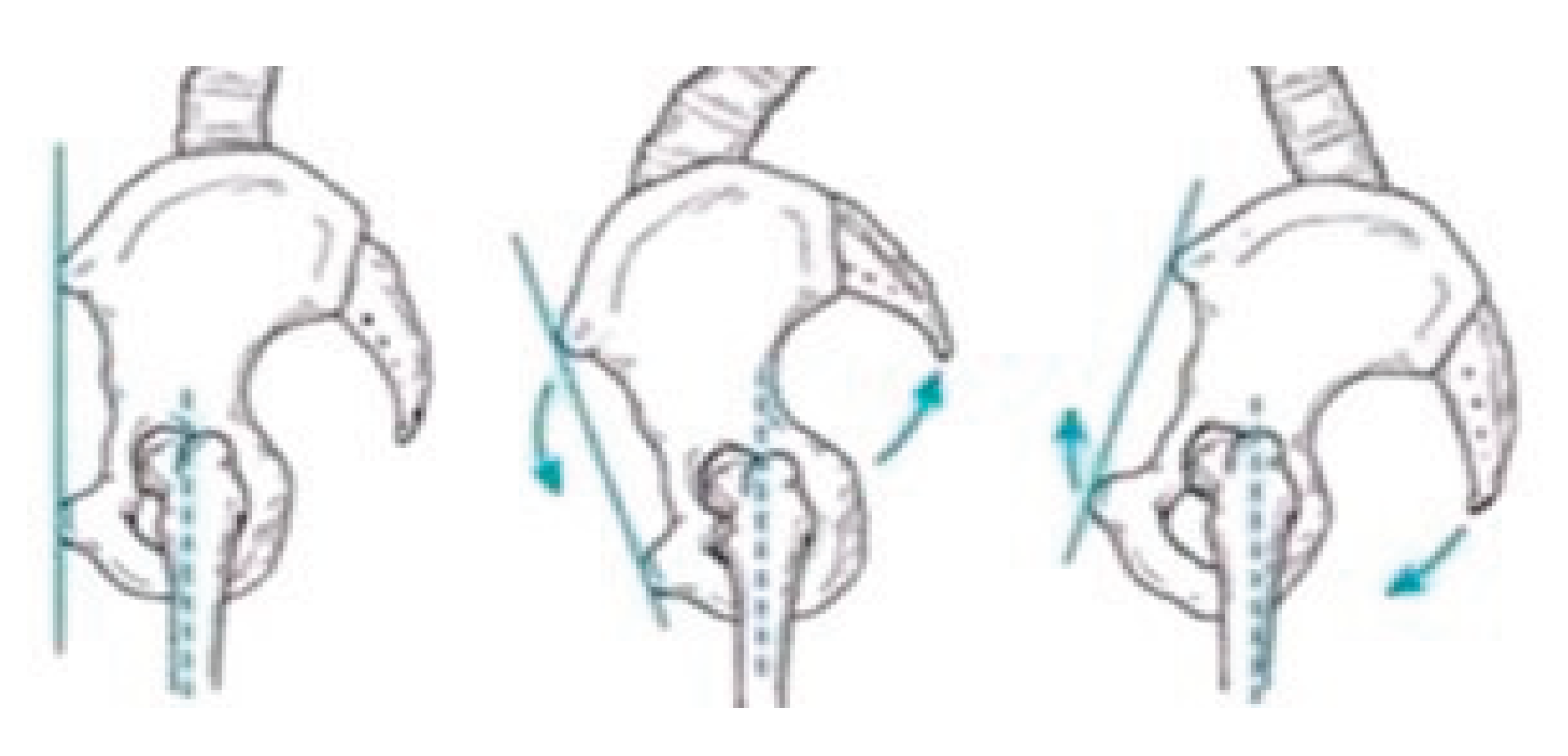
Figure 4.
Pelvic oscillation – F plane.
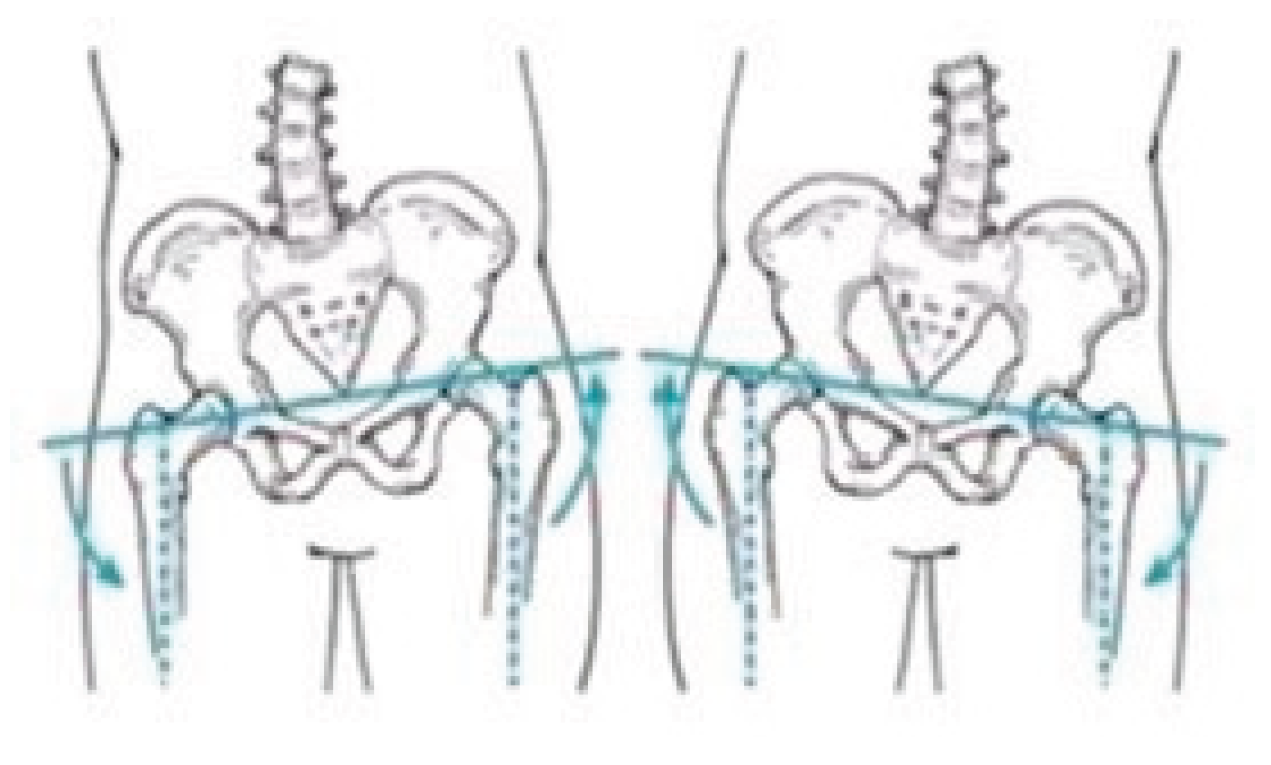
Figure 5.
Pelvic oscillation – T plane.
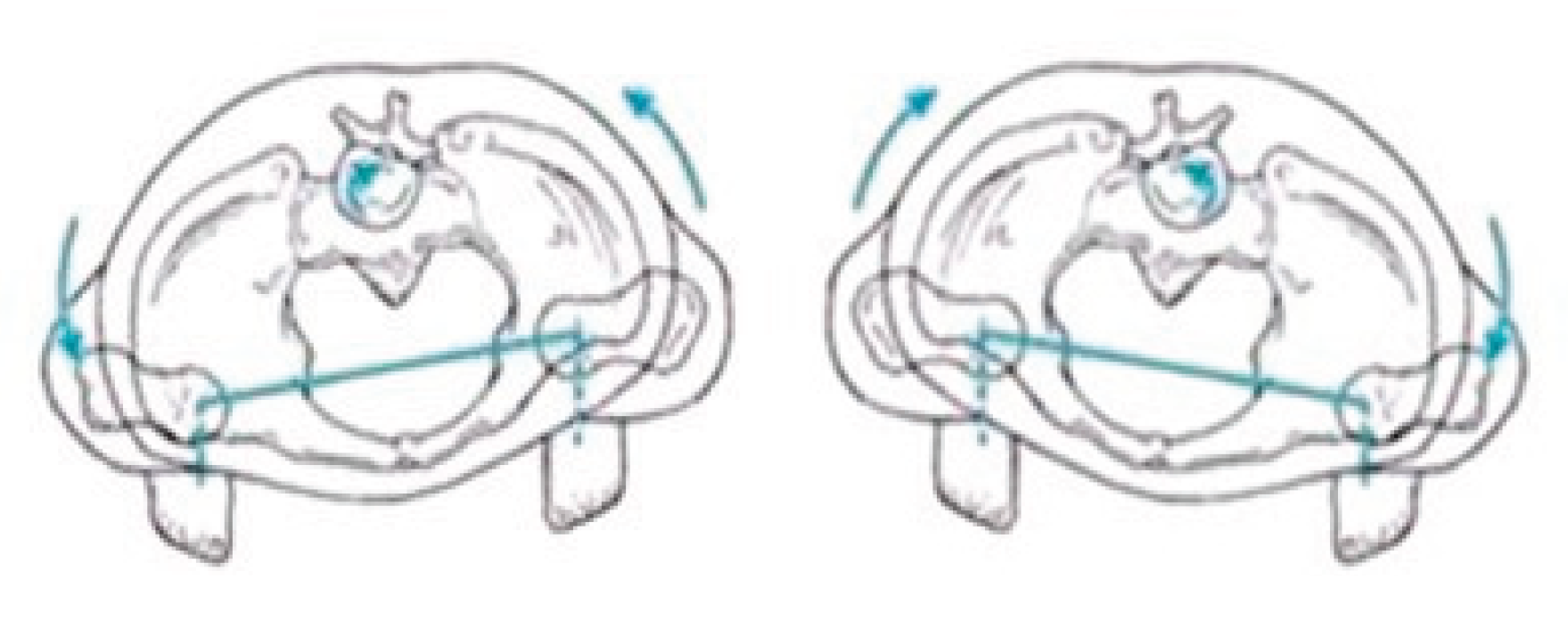
Figure 6.
Mean pelvic oscillation values in the S plane at two time points for Group A and Group B.
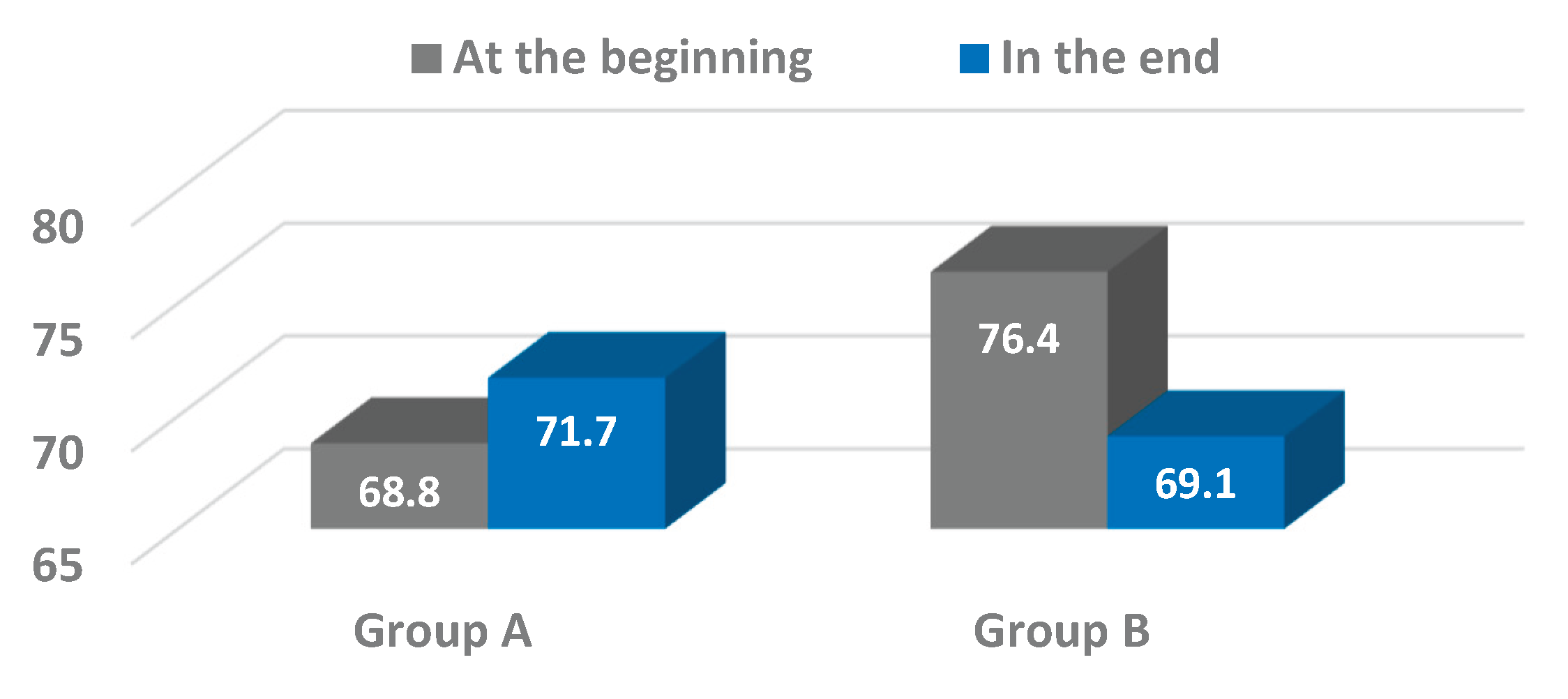
Figure 7.
Mean pelvic oscillation values in the F plane at two time points for Group A and Group B.
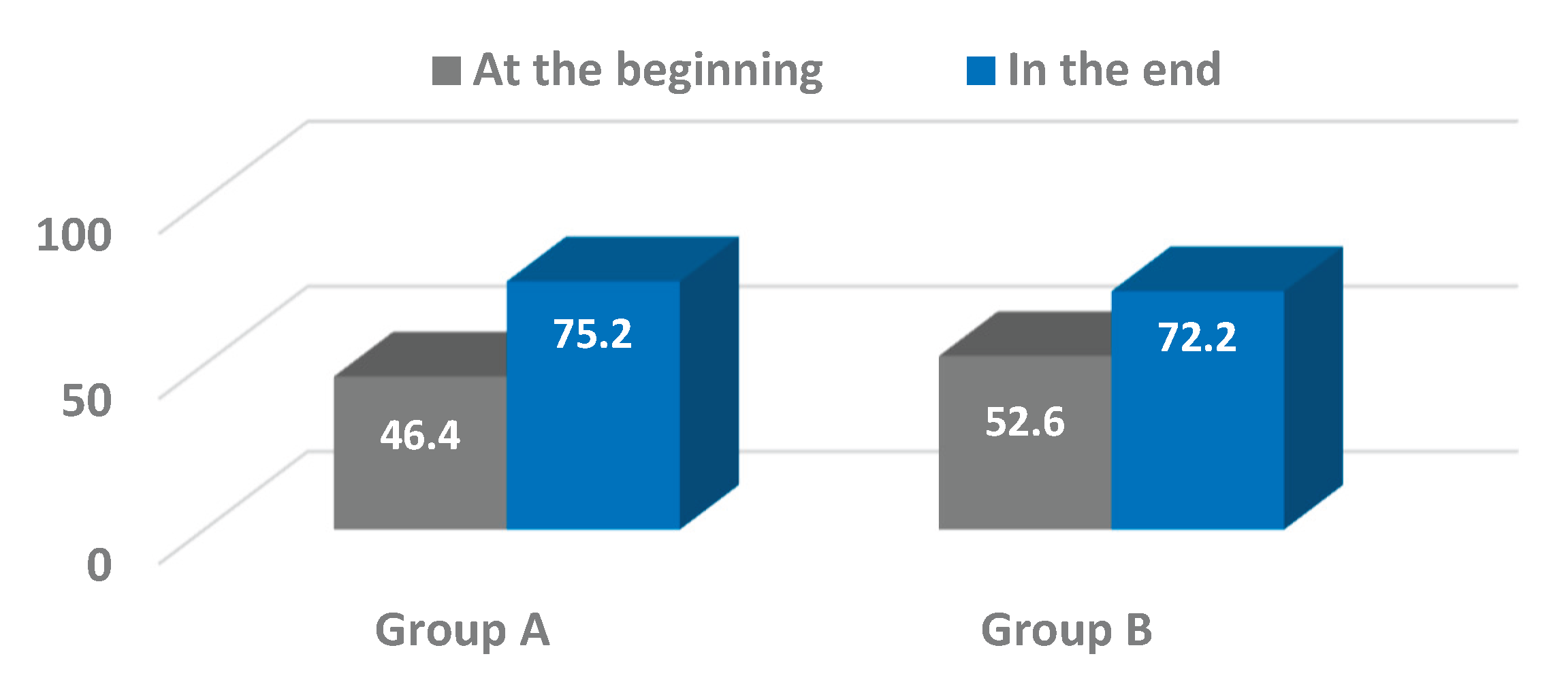
Figure 8.
Mean pelvic oscillation values in the T plane at two time points for Group A and Group B.
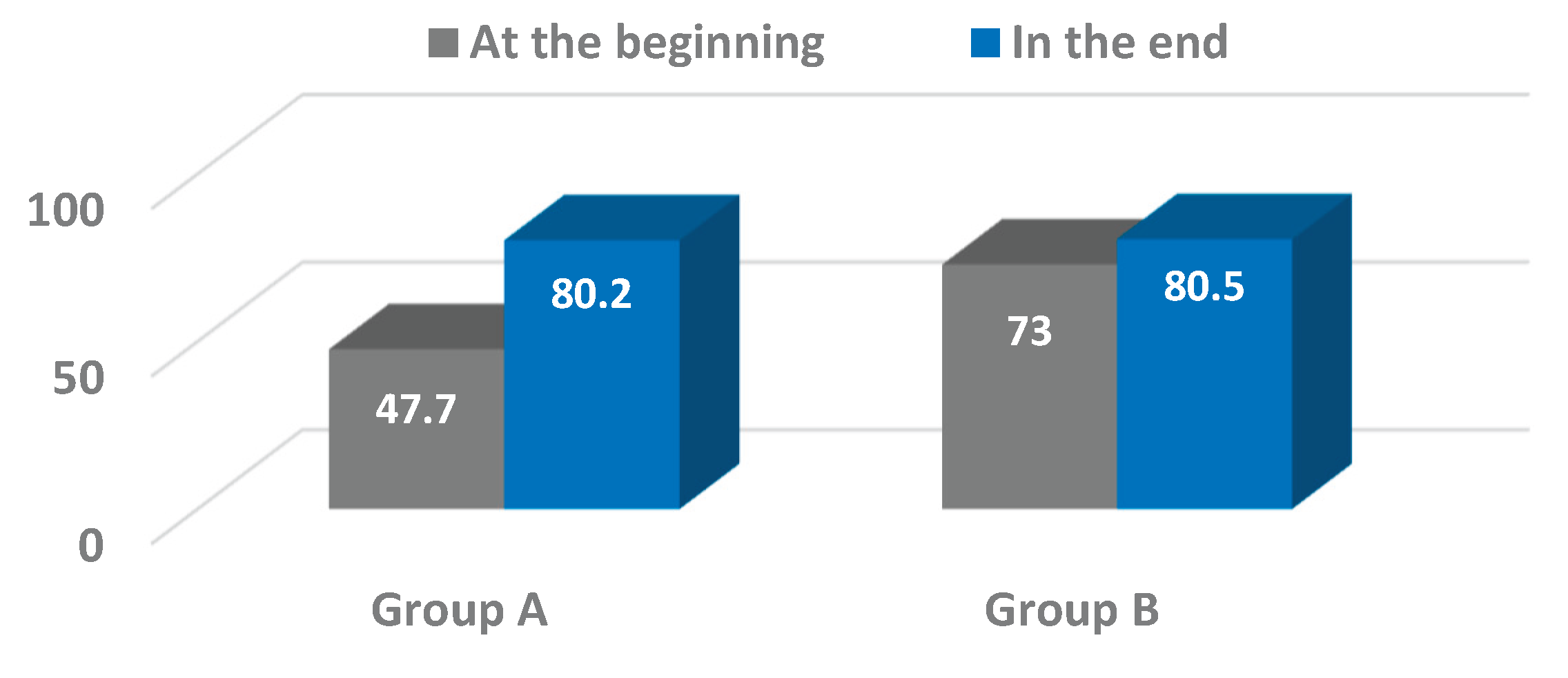

Table 1.
Pelvic Oscillation in the Sagittal Plane (%): Comparative Values at Initial and Final Time Points for Groups A and B.
Table 1.
Pelvic Oscillation in the Sagittal Plane (%): Comparative Values at Initial and Final Time Points for Groups A and B.
| Indicator | n | At the beginning | In the end |
t-test |
P |
|||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| X̄ | SD | Cv% | СI 95% | X̄ | SD | Cv% | СI 95% | |||||
| Group A | 15 | 68,8 | 26,606 | 38,7 | 49,1÷78,6 | 71,7 | 12,852 | 17,9 | 64,6÷78,8 | -1,036 | =0,313 | |
| Group B | 34 | 76,4 | 17,888 | 23,4 | 70,2÷82,7 | 69,1 | 13,927 | 20,2 | 64,3÷74,0 | 1,878 | =0,065 | |
Table 2.
Pelvic Oscillation in the Frontal Plane (%): Comparative Values at Initial and Final Time Points for Groups A and B.
Table 2.
Pelvic Oscillation in the Frontal Plane (%): Comparative Values at Initial and Final Time Points for Groups A and B.
| Indicator | n | At the beginning | In the end |
t-test |
P |
|||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| X̄ | SD | Cv% | СI 95% | X̄ | SD | Cv% | СI 95% | |||||
| Group A | 15 | 46,4 | 27,669 | 59,6 | 31,1÷61,7 | 75,2 | 14,407 | 19,2 | 67,2÷83,1 | -3,576 | =0,001 | |
| Group B | 34 | 52,6 | 26,263 | 49,9 | 43,4÷61,7 | 72,2 | 18,027 | 25,0 | 65,9÷78,5 | -3,588 | =0,001 | |
Table 3.
Pelvic Oscillation in the Transverse Plane (%): Comparative Values at Initial and Final Time Points for Groups A and B.
Table 3.
Pelvic Oscillation in the Transverse Plane (%): Comparative Values at Initial and Final Time Points for Groups A and B.
| Indicator | N | At the beginning | In the end |
t-test |
P |
||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| X̄ | SD | Cv% | СI 95% | X̄ | SD | Cv% | СI 95% | ||||||
| Group A | 15 | 47,7 | 29,960 | 62,8 | 31,1÷64,3 | 80,2 | 11,826 | 14,7 | 73,6÷86,7 | -3,908 | =0,001 | ||
| Group B | 34 | 73,0 | 18,802 | 25,8 | 66,5÷79,6 | 80,5 | 14,183 | 17,6 | 75,6÷85,5 | -1,857 | =0,068 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



