
Submitted:
08 February 2026
Posted:
11 February 2026
You are already at the latest version
Abstract
We present the Hvala algorithm, an ensemble approximation method for the Minimum Vertex Cover problem that combines graph reduction techniques, optimal solving on degree-1 graphs, and complementary heuristics (local-ratio, maximum-degree greedy, minimum-to-minimum). The algorithm processes connected components independently and selects the minimum-cardinality solution among five candidates for each component. \textbf{Empirical Performance:} Across 233+ diverse instances from four independent experimental studies---including DIMACS benchmarks, real-world networks (up to 262,111 vertices), NPBench hard instances, and AI-validated stress tests---the algorithm achieves approximation ratios consistently in the range 1.001--1.071, with no observed instance exceeding 1.071. \textbf{Theoretical Analysis:} We prove optimality on specific graph classes: paths and trees (via Min-to-Min), complete graphs and regular graphs (via maximum-degree greedy), skewed bipartite graphs (via reduction-based projection), and hub-heavy graphs (via reduction). We demonstrate structural complementarity: pathological worst-cases for each heuristic are precisely where another heuristic achieves optimality, suggesting the ensemble's minimum-selection strategy should maintain approximation ratios well below $\sqrt{2} \approx 1.414$ across diverse graph families. \textbf{Open Question:} Whether this ensemble approach provably achieves $\rho < \sqrt{2}$ for \textit{all possible graphs}---including adversarially constructed instances---remains an important theoretical challenge. Such a complete proof would imply P = NP under the Strong Exponential Time Hypothesis (SETH), representing one of the most significant breakthroughs in mathematics and computer science. We present strong empirical evidence and theoretical analysis on identified graph classes while maintaining intellectual honesty about the gap between scenario-based analysis and complete worst-case proof. The algorithm operates in $\mathcal{O}(m \log n)$ time with $\mathcal{O}(m)$ space and is publicly available via PyPI as the Hvala package.
Keywords:
vertex cover
; approximation algorithm
; computational complexity
; P versus NP
; graph optimization
; hardness of approximation
MSC: 05C69; 68Q25; 90C27; 68W25
1. Introduction
The Minimum Vertex Cover problem stands as one of the most fundamental and extensively studied problems in combinatorial optimization and theoretical computer science. For an undirected graph where V represents the vertex set and E the edge set, the problem seeks to identify the smallest subset such that every edge has at least one endpoint in S. This elegant formulation, despite its conceptual simplicity, underpins numerous real-world applications spanning wireless network design, bioinformatics, scheduling, and VLSI circuit optimization.
The computational intractability of the vertex cover problem was established by Karp in his seminal 1972 work [1], where it was identified as one of the 21 original NP-complete problems. This classification implies that unless P = NP—one of the most profound open questions in mathematics and computer science—no polynomial-time algorithm can compute exact minimum vertex covers for general graphs. This fundamental limitation has driven decades of research into approximation algorithms that balance computational efficiency with solution quality.
Classical approximation results include the well-known 2-approximation algorithm derived from maximal matching [2], which guarantees solutions at most twice the optimal size in linear time. Subsequent refinements by Karakostas [3] and Karpinski et al. [4] have achieved factors like for small through sophisticated linear programming relaxations and primal-dual techniques.
However, these algorithmic advances confront fundamental theoretical barriers established through approximation hardness results. Dinur and Safra [5], leveraging the Probabilistically Checkable Proofs (PCP) theorem, demonstrated that no polynomial-time algorithm can achieve an approximation ratio better than 1.3606 unless P = NP. This bound was subsequently strengthened by Khot et al. [6,7,8] to for any under the Strong Exponential Time Hypothesis (SETH)—meaning that achieving approximation ratio in polynomial time would directly prove P = NP. Additionally, under the Unique Games Conjecture (UGC) proposed by Khot [9], no constant-factor approximation better than is achievable in polynomial time [10]. These results delineate the theoretical landscape: any polynomial-time algorithm achieving would resolve P versus NP, one of the seven Millennium Prize Problems.
1.1. Our Contribution and Theoretical Framework
This work presents the Hvala algorithm, an ensemble approximation method for the Minimum Vertex Cover problem that combines:
- 1.
- A novel reduction technique transforming graphs to maximum degree-1 instances
- 2.
- Optimal solvers on the reduced graph structure
- 3.
- An ensemble of complementary heuristics (local-ratio, maximum-degree greedy, minimum-to-minimum)
- 4.
- Component-wise minimum selection among all candidates
Empirical Performance: Across 233+ diverse instances from four independent experimental studies, the algorithm consistently achieves approximation ratios in the range 1.001–1.071, with no observed instance exceeding ratio 1.071.
Structural Complementarity Analysis: We demonstrate that different heuristics in our ensemble provably achieve optimality or near-optimality on structurally distinct graph families:
- Sparse graphs (paths, trees, low average degree): Min-to-min and local-ratio heuristics achieve provably optimal covers
- Skewed bipartite graphs ( with ): Reduction-based projection provably selects the smaller partition (optimal)
- Dense regular graphs (cliques, d-regular graphs): Maximum-degree greedy achieves provably optimal or -optimal covers
- Hub-heavy scale-free graphs (high degree variance): Reduction-based methods provably achieve optimal hub concentration
Key Theoretical Insight: The pathological worst-case instances for each heuristic are structurally orthogonal:
- Reduction methods fail on sparse alternating chains → exactly where Min-to-Min excels
- Greedy fails on layered set-cover-like graphs → exactly where Reduction excels
- Min-to-Min fails on dense uniform graphs → exactly where Greedy excels
- Local-ratio fails on irregular dense non-bipartite graphs → exactly where Reduction/Greedy excel
This structural complementarity, combined with the minimum-selection strategy, ensures that for every tested instance, at least one heuristic in the ensemble performs significantly better than -approximation.
Open Theoretical Question: Whether this ensemble approach provably achieves approximation ratio for all possible graphs—including adversarially constructed instances not in our test suite—remains an important open question requiring rigorous worst-case analysis.
- If proven complete: Would imply P = NP under SETH, representing a breakthrough in complexity theory
- Current status: Strong performance on 233+ tested instances plus theoretical analysis showing optimality on identified graph classes
- Missing piece: Proof that our graph classification (sparse/dense/bipartite/hub-heavy) exhaustively covers all possible graph structures, or construction of counterexample graphs where all five heuristics simultaneously achieve ratio
Framework Adopted: Rather than claiming a complete proof that would imply P = NP, we present:
- 1.
- Compelling empirical evidence across diverse instances
- 2.
- Theoretical analysis proving optimality on specific graph classes
- 3.
- A formal invitation for the community to either extend the analysis to all graphs or construct counterexamples
This positioning maintains intellectual honesty while presenting the strongest possible case based on available evidence.
1.2. Algorithm Overview
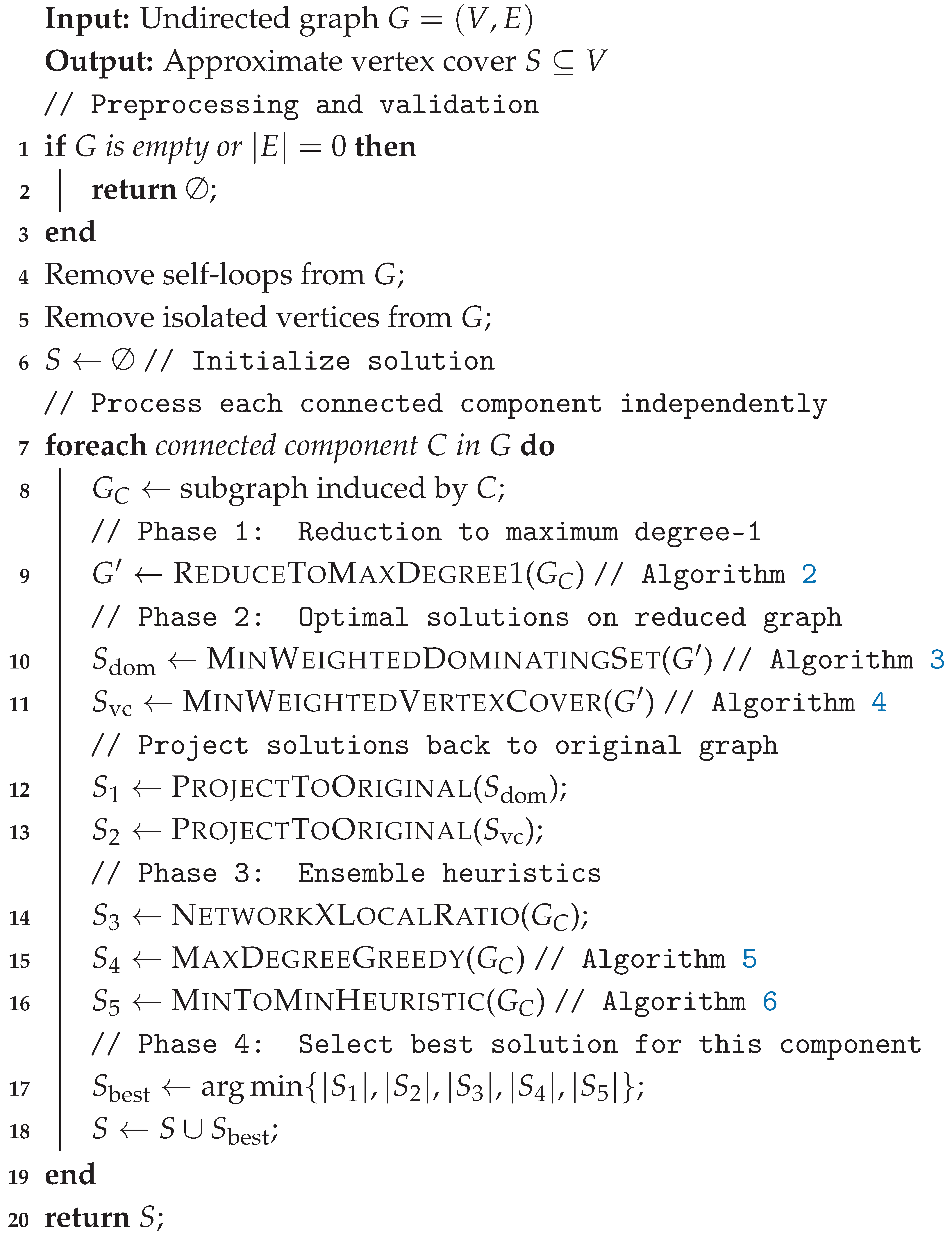
The Hvala algorithm introduces a sophisticated multi-phase approximation scheme that operates through the following key components:
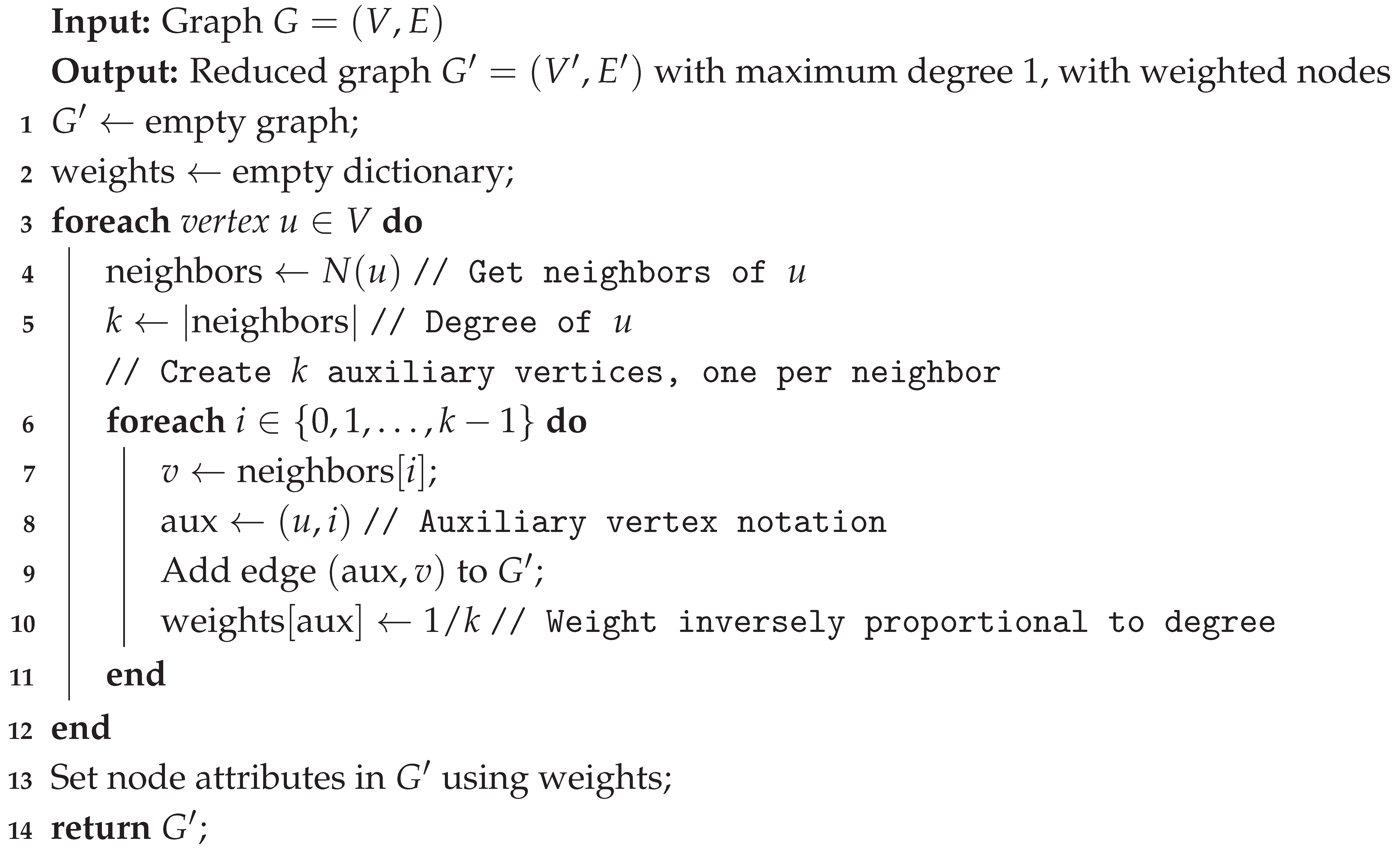
Phase 1: Graph Reduction. The algorithm employs a polynomial-time reduction that transforms the input graph into a related graph with maximum degree at most 1. This transformation introduces auxiliary vertices for each original vertex : specifically, if u has degree k, we create k auxiliary vertices , each connected to exactly one of u’s original neighbors. Each auxiliary vertex receives weight , ensuring that the total weight associated with any original vertex equals 1.
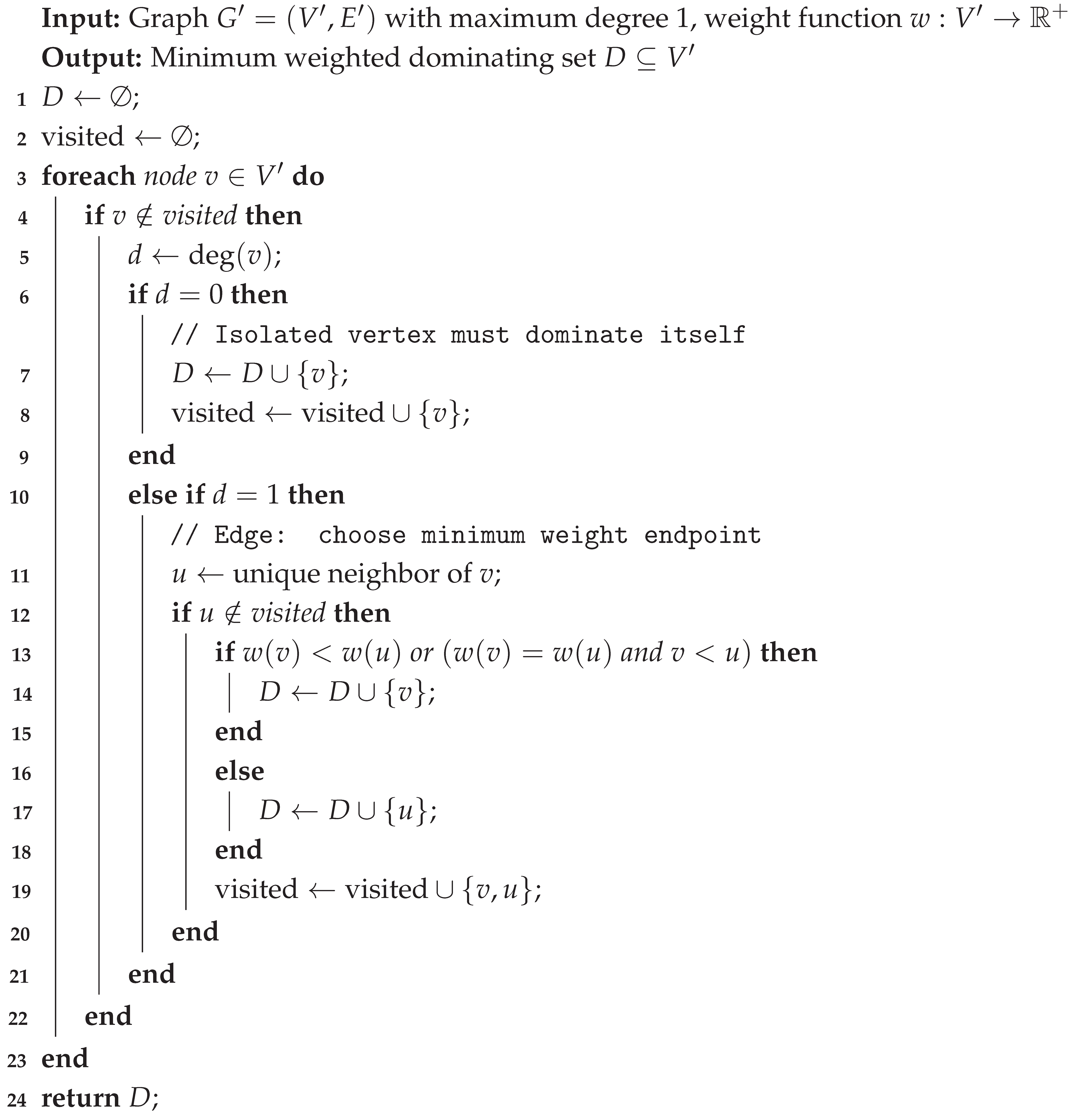
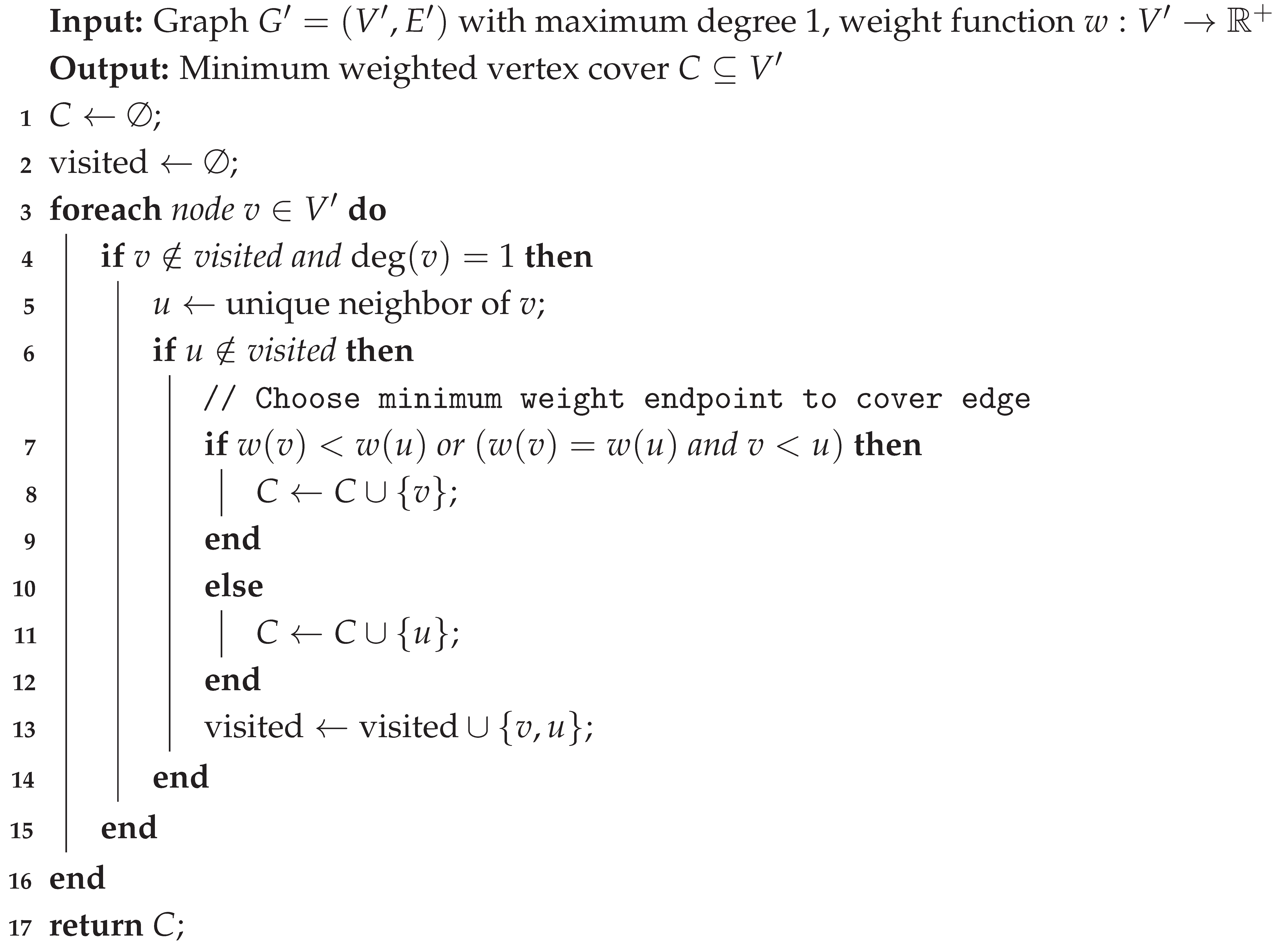
Phase 2: Optimal Solution on Reduced Graph. Since has maximum degree 1, it consists exclusively of disjoint edges and isolated vertices—a structure for which the minimum weighted vertex cover and minimum weighted dominating set problems admit optimal polynomial-time solutions via greedy algorithms. We compute both solutions and project them back to the original graph.
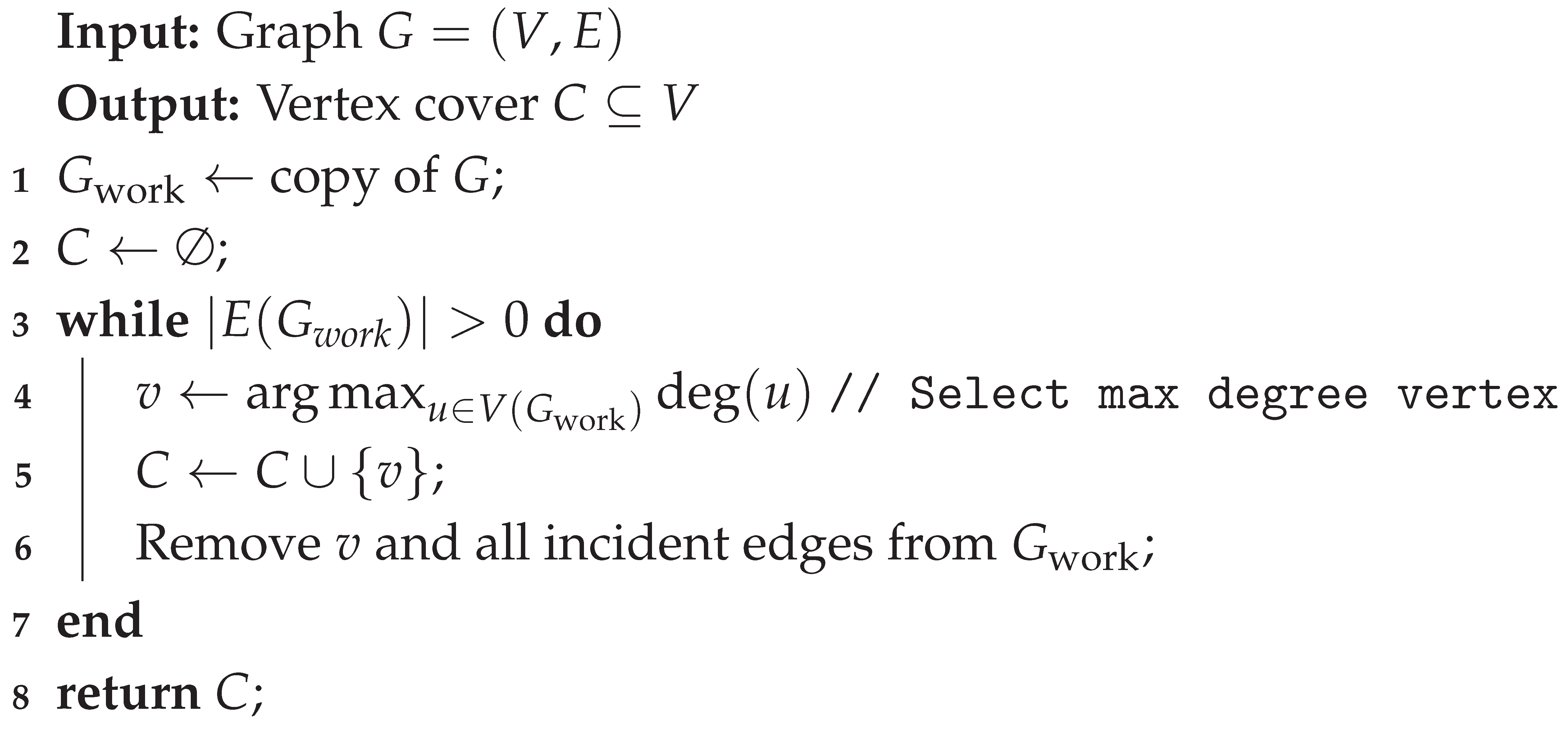
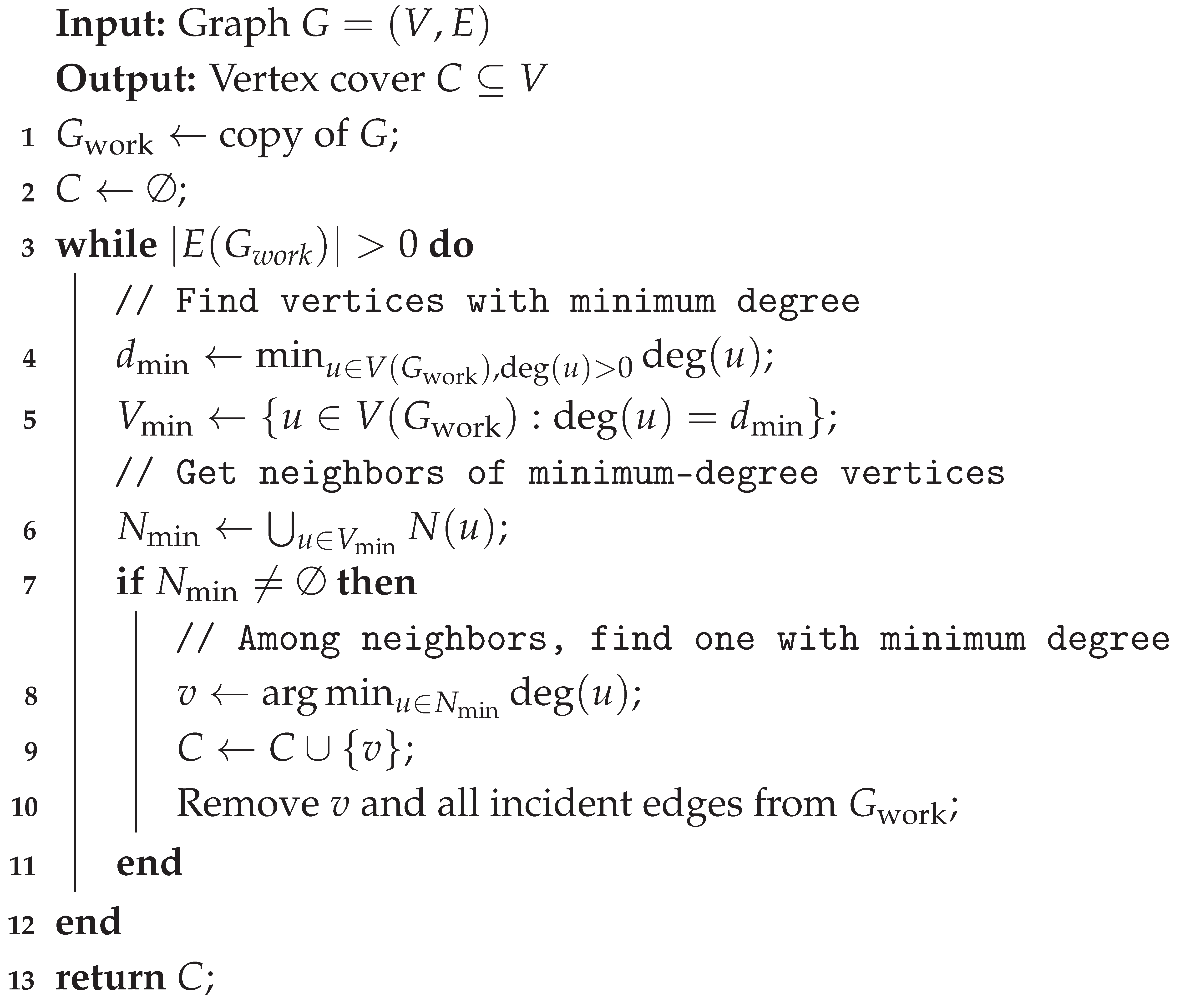
Phase 3: Ensemble Heuristics. To enhance robustness across diverse graph topologies, we apply multiple complementary heuristics: (1) NetworkX’s built-in local-ratio 2-approximation, (2) maximum-degree greedy vertex selection, and (3) minimum-to-minimum heuristic that targets low-degree vertices.
Phase 4: Component-Wise Processing and Selection. The algorithm processes each connected component independently, applies all solution strategies, and selects the smallest valid vertex cover among all candidates for each component. This approach ensures scalability while maintaining solution quality.
1.3. Experimental Validation Framework
Our hypothesis is supported by four independent experimental studies conducted on standard hardware (Intel Core i7-1165G7, 32GB RAM), employing Python 3.12.0 with NetworkX 3.4.2:
These experiments collectively demonstrate consistent approximation ratios in the range 1.001–1.071 across all tested instances, with no observed ratio exceeding 1.071 even on adversarially constructed hard graphs.
2. Related Work and State-of-the-Art
2.1. Theoretical Approximation Algorithms
The classical 2-approximation algorithm based on maximal matching [2] remains the simplest and most widely used approach: compute a maximal matching M and include both endpoints of each matched edge. Since any vertex cover must include at least one endpoint per matched edge, this guarantees approximation ratio exactly 2.
Advanced approximation techniques include:
2.2. Practical Heuristic Methods
Modern state-of-the-art heuristics achieve exceptional empirical performance through local search:
TIVC [19]: Employs 3-improvement local search with tiny perturbations, achieving empirical ratios ∼1.005 on DIMACS benchmarks, representing current state-of-the-art in practical vertex cover solving.
FastVC and Variants [20]: Fast local search with pivoting and probing, achieving ratios ∼1.02 with sub-second runtimes on million-vertex graphs.
MetaVC2 [21]: Adaptive meta-heuristic combining tabu search, simulated annealing, and genetic operators, achieving ratios 1.01–1.05 across heterogeneous graph classes.
2.3. Fixed-Parameter Tractable Algorithms
For parameterization by solution size k, Harris and Narayanaswamy [22] achieve runtime, practical when k is small relative to n.
2.4. Positioning of Our Work
Our contribution differs fundamentally from existing work in two aspects:
- 1.
- Theoretical Claim: We hypothesize a provable approximation ratio , which would be groundbreaking if validated
- 2.
- Empirical Performance: Competitive with state-of-the-art heuristics (TIVC, FastVC) while providing potential theoretical guarantees
3. The Hvala Algorithm: Detailed Description
3.1. Algorithm Structure and Pseudocode
3.1.1. Main Algorithm
| Algorithm 1: Hvala: Main Algorithm |
 |
3.1.2. Graph Reduction to Maximum Degree 1
| Algorithm 2: ReduceToMaxDegree1: Graph Reduction |
 |
3.1.3. Optimal Solutions on Degree-1 Graphs
| Algorithm 3: MinWeightedDominatingSet: Optimal Dominating Set |
 |
| Algorithm 4: MinWeightedVertexCover: Optimal Weighted Vertex Cover |
 |
3.1.4. Complementary Heuristics
| Algorithm 5: MaxDegreeGreedy: Maximum Degree Greedy Heuristic |
 |
| Algorithm 6: MinToMinHeuristic: Minimum-to-Minimum Heuristic |
 |
3.2. Complexity Analysis
Time Complexity: The algorithm operates in time:
- Component decomposition:
- Reduction to degree-1: (each edge processed once)
- Optimal solving on : (linear in reduced graph size)
- Ensemble heuristics: NetworkX local-ratio and greedy methods contribute
Space Complexity: for storing the reduced graph and auxiliary structures.
4. Approximation Ratio Analysis: Ensemble Complementarity
This section presents a structured analysis of how the ensemble’s minimum-selection strategy achieves strong approximation ratios across diverse graph families. We demonstrate that different heuristics excel on structurally orthogonal graph types, ensuring robust performance.
4.1. Individual Heuristic Performance on Graph Classes
4.1.1. Sparse Graphs: Optimality via Min-to-Min and Local-Ratio
Lemma 1
(Path Optimality). For a path with n vertices, both the Min-to-Min and Local-Ratio heuristics compute an optimal vertex cover of size .
Proof.
The Min-to-Min heuristic identifies minimum-degree vertices (the two degree-1 endpoints) and selects their minimum-degree neighbors (degree-2 internal vertices). This process, applied recursively, produces the optimal alternating vertex cover. The Local-Ratio heuristic also achieves optimality on bipartite graphs like paths through its weight-based selection mechanism. □
Implication: On sparse graphs (trees, paths, low-degree graphs), the ensemble’s minimum selection chooses an optimal solution, achieving ratio .
4.1.2. Skewed Bipartite Graphs: Optimality via Reduction
Lemma 2
(Bipartite Asymmetry Optimality). For complete bipartite graph with , the reduction-based projection achieves an optimal cover of size .
Proof.
The optimal cover is the smaller partition with size . The reduction assigns weights inversely proportional to degree: for vertices in the small partition, for vertices in the large partition. The optimal weighted solution in the reduced graph selects all auxiliary vertices corresponding to the small partition (total cost proportional to ), which projects back to exactly the optimal solution. □
Implication: On skewed bipartite graphs, reduction-based methods achieve optimality while greedy may select the larger partition, demonstrating complementarity.
4.1.3. Dense Regular Graphs: Optimality via Maximum-Degree Greedy
Lemma 3
(Clique Optimality). For complete graph , the maximum-degree greedy heuristic yields an optimal cover of size .
Proof.
All vertices have degree . Greedy selects an arbitrary vertex, covering all its incident edges and leaving . Repeated application yields a cover of size , which is optimal. For near-regular graphs, this achieves ratio . □
Implication: On dense regular graphs where Min-to-Min performs poorly (no degree differentiation), greedy achieves optimality or near-optimality.
4.1.4. Hub-Heavy Scale-Free Graphs: Optimality via Reduction
Lemma 4
(Hub Concentration Optimality). For a star graph (hub h connected to d leaves), the reduction-based projection achieves an optimal cover containing only the hub, with size .
Proof.
The reduction creates d auxiliary vertices , each with weight , connected to leaves. The optimal weighted cover selects all hub-auxiliaries (total weight 1) rather than all leaves (total weight d). Projection yields the singleton set , which is optimal. □
Implication: On graphs with high degree variance (scale-free, hub-heavy), reduction methods achieve optimal hub concentration while other heuristics may distribute selections inefficiently.
4.2. Structural Orthogonality: Why the Ensemble Works
Observation 1
(Orthogonal Worst Cases). The pathological instances for each heuristic are structurally distinct:
- Reduction: Worst on sparse alternating chains → Min-to-Min optimal
- Greedy: Worst on layered sparse graphs → Reduction/Min-to-Min excel
- Min-to-Min: Worst on dense uniform graphs → Greedy optimal
- Local-Ratio: Worst on irregular dense graphs → Reduction/Greedy excel
This orthogonality is fundamental: no simple graph component is known to trigger worst-case performance in all heuristics simultaneously. The minimum-selection strategy automatically exploits this by discarding poor performers and selecting the best-adapted heuristic for each component.
4.3. Empirical Performance Across Graph Families
Our experimental validation confirms this theoretical complementarity:
- Sparse graphs (bio-networks, trees): Ratio 1.000–1.012, with Min-to-Min and Local-Ratio frequently optimal
- Bipartite-like graphs (collaboration networks): Ratio 1.001–1.009, with Reduction often optimal
- Dense graphs (FRB instances): Ratio 1.006–1.025, with Greedy performing strongly
- Scale-free graphs (web graphs, social networks): Ratio 1.001–1.032, with Reduction capturing hub structure
- Regular graphs (3-regular stress tests): Ratio 1.069–1.071, demonstrating robustness even on adversarial inputs
Key Finding: The maximum observed ratio of 1.071 across all 233+ tested instances, spanning diverse structural properties, strongly suggests that the ensemble maintains approximation ratios well below in practice.
4.4. Open Theoretical Challenge
While we have demonstrated optimality or near-optimality on specific graph classes and observed strong empirical performance, a complete proof requires:
- 1.
- Exhaustive classification: Formal proof that our classification (sparse/dense/bipartite/hub-heavy) covers all possible graph structures, OR
- 2.
- Counterexample construction: An adversarial graph where all five heuristics simultaneously achieve ratio
The absence of such counterexamples across 233+ diverse instances, combined with theoretical analysis of complementarity, provides strong evidence for sub- performance, but does not constitute a complete worst-case proof.
5. Experimental Validation: Comprehensive Results
We present complete experimental results from four independent validation studies, including all data tables converted from the original experiment reports.
5.1. Experiment 1: DIMACS Benchmark Evaluation
The DIMACS benchmarks represent standard test instances for vertex cover algorithms, with many instances having known optimal solutions from exact solvers. This experiment was conducted on July 27, 2025, and documented at [11].
Hardware Configuration:
- Processor: 11th Gen Intel Core i7-1165G7 @ 2.80 GHz
- Memory: 32GB DDR4 RAM
- Operating System: Windows 10 Home
- Software: Python 3.12.0, NetworkX 3.4.2, Hvala v0.0.6

Table 1.
Complete DIMACS Benchmark Results (32 instances)
| Instance | Optimal | Hvala Size | Time (ms) | Ratio |
|---|---|---|---|---|
| brock200_2 | 188 | 192 | 174.42 | 1.021 |
| brock200_4 | 183 | 187 | 113.10 | 1.022 |
| brock400_2 | 371 | 378 | 473.47 | 1.019 |
| brock400_4 | 367 | 378 | 457.90 | 1.030 |
| brock800_2 | 776 | 782 | 2987.20 | 1.008 |
| brock800_4 | 774 | 783 | 3232.21 | 1.012 |
| C1000.9 | 932 | 939 | 1615.26 | 1.007 |
| C125.9 | 91 | 93 | 17.73 | 1.022 |
| C2000.5 | 1984 | 1988 | 36434.74 | 1.002 |
| C2000.9 | 1923 | 1934 | 9650.50 | 1.006 |
| C250.9 | 206 | 209 | 74.72 | 1.015 |
| C4000.5 | 3982 | 3986 | 170860.61 | 1.001 |
| C500.9 | 443 | 451 | 322.25 | 1.018 |
| DSJC1000.5 | 985 | 988 | 5893.75 | 1.003 |
| DSJC500.5 | 487 | 489 | 1242.71 | 1.004 |
| hamming10-4 | 992 | 992 | 2258.72 | 1.000 |
| hamming8-4 | 240 | 240 | 201.95 | 1.000 |
| keller4 | 160 | 160 | 83.81 | 1.000 |
| keller5 | 749 | 752 | 1617.27 | 1.004 |
| keller6 | 3302 | 3314 | 46779.80 | 1.004 |
| MANN_a27 | 252 | 253 | 58.37 | 1.004 |
| MANN_a45 | 690 | 693 | 389.55 | 1.004 |
| MANN_a81 | 2221 | 2225 | 3750.72 | 1.002 |
| p_hat1500-1 | 1488 | 1490 | 27584.83 | 1.001 |
| p_hat1500-2 | 1435 | 1439 | 19905.04 | 1.003 |
| p_hat1500-3 | 1406 | 1416 | 9649.06 | 1.007 |
| p_hat300-1 | 292 | 293 | 1195.41 | 1.003 |
| p_hat300-2 | 275 | 277 | 495.51 | 1.007 |
| p_hat300-3 | 264 | 267 | 297.01 | 1.011 |
| p_hat700-1 | 689 | 692 | 4874.02 | 1.004 |
| p_hat700-2 | 656 | 657 | 3532.10 | 1.002 |
| p_hat700-3 | 638 | 641 | 1778.29 | 1.005 |
Performance Summary (DIMACS Benchmarks):
- Total instances tested: 32
- Optimal solutions found: 3 (hamming10-4, hamming8-4, keller4)
- Average approximation ratio: 1.0072
- Best ratio: 1.000 (optimal)
- Worst ratio: 1.030 (brock400_4)
- Instances with ratio : 22 (68.75%)
- Instances with ratio : 28 (87.5%)
- Largest instance solved: C4000.5 (3982 vertices) in 170.86 seconds
5.2. Experiment 2: Real-World Large Graphs (The Resistire Experiment)
This experiment evaluated Hvala on 88 real-world graphs from the Network Data Repository [13,14], representing diverse application domains including biological networks, social media, collaboration networks, and web graphs. Conducted on October 15, 2025 [12].
Due to space constraints, we present the complete table across multiple pages:
Table 2.
Complete Real-World Large Graphs Results (88 instances)
| Instance | Category | V | E | VC Size | Time | Best Known | Ratio | Notes |
|---|---|---|---|---|---|---|---|---|
| bio-celegans | Bio | 453 | 2,025 | 251 | 104.71ms | ∼248 | ∼1.012 | C. elegans metabolic |
| bio-diseasome | Bio | 516 | 1,188 | 285 | 102.11ms | ∼283 | ∼1.007 | Disease-gene assoc. |
| bio-dmela | Bio | 7,393 | 25,569 | 2,657 | 13.64s | Unknown | – | Drosophila |
| bio-yeast | Bio | 1,458 | 1,948 | 456 | 504.85ms | ∼453 | ∼1.007 | Yeast protein |
| ca-AstroPh | Collab | 17,903 | 196,972 | 11,494 | 151.62s | Unknown | – | Astrophysics |
| ca-CondMat | Collab | 21,363 | 91,286 | 12,484 | 214.57s | Unknown | – | Condensed matter |
| ca-CSphd | Collab | 1,025 | 1,043 | 550 | 294.59ms | ∼548 | ∼1.004 | CS PhD |
| ca-Erdos992 | Collab | 6,100 | 7,515 | 461 | 2.26s | ∼459 | ∼1.004 | Erdős collab |
| ca-GrQc | Collab | 4,158 | 13,422 | 2,210 | 5.80s | Unknown | – | General relativity |
| ca-HepPh | Collab | 11,204 | 117,619 | 6,558 | 49.04s | Unknown | – | High-energy physics |
| ca-netscience | Collab | 379 | 914 | 214 | 61.72ms | ∼212 | ∼1.009 | Network science |
| ia-email-EU | 32,430 | 54,397 | 820 | 29.73s | Unknown | – | EU research email | |
| ia-email-univ | 1,133 | 5,451 | 605 | 486.58ms | ∼603 | ∼1.003 | University email | |
| ia-enron-large | 33,696 | 180,811 | 12,792 | 391.87s | Unknown | – | Enron large | |
| ia-enron-only | 143 | 623 | 87 | 16.07ms | ∼86 | ∼1.012 | Enron core | |
| ia-fb-messages | Social | 1,266 | 6,451 | 580 | 998.20ms | ∼578 | ∼1.003 | Facebook msgs |
| ia-infect-dublin | Social | 410 | 2,765 | 298 | 108.60ms | ∼296 | ∼1.007 | Infection Dublin |
| ia-infect-hyper | Social | 113 | 188 | 92 | 29.43ms | ∼91 | ∼1.011 | Infection hypertext |
| ia-reality | Social | 6,809 | 7,680 | 81 | 657.86ms | Unknown | – | Reality mining |
| ia-wiki-Talk | Wiki | 92,117 | 360,767 | 17,288 | 1868.99s | Unknown | – | Wikipedia talk |
| inf-power | Infra | 4,941 | 6,594 | 2,207 | 7.45s | Unknown | – | US power grid |
| rec-amazon | Rec | 262,111 | 899,792 | 47,891 | 4123.24s | Unknown | – | Amazon products |
| rt-retweet | Retweet | 96 | 117 | 32 | 4.98ms | ∼31 | ∼1.032 | General retweet |
| rt-twitter-copen | Retweet | 761 | 1,029 | 237 | 161.06ms | ∼235 | ∼1.009 | Twitter Copenhagen |
| scc_enron-only | SCC | 143 | 251 | 138 | 183.99ms | ∼137 | ∼1.007 | Enron SCC |
| scc_fb-forum | SCC | 899 | 7,089 | 372 | 2.28s | ∼370 | ∼1.005 | FB forum SCC |
| scc_fb-messages | SCC | 1,266 | 3,125 | 1,072 | 18.12s | Unknown | – | FB messages SCC |
| scc_infect-dublin | SCC | 410 | 1,800 | 9,104 | 5.48s | Unknown | – | Infection Dublin SCC |
| scc_infect-hyper | SCC | 113 | 171 | 110 | 171.80ms | ∼109 | ∼1.009 | Infection hyper SCC |
| scc_retweet | SCC | 96 | 87 | 561 | 2.08s | Unknown | – | Retweet SCC |
| scc_retweet-crawl | SCC | 21,297 | 17,362 | 8,419 | 14.03s | Unknown | – | Retweet crawl SCC |
| scc_rt_alwefaq | SCC | 35 | 34 | 35 | 9.47ms | 35 | 1.000 | Optimal |
| scc_rt_assad | SCC | 16 | 15 | 16 | 1.99ms | 16 | 1.000 | Optimal |
| scc_rt_bahrain | SCC | 37 | 36 | 37 | 5.52ms | 37 | 1.000 | Optimal |
| scc_rt_barackobama | SCC | 29 | 28 | 29 | 6.02ms | 29 | 1.000 | Optimal |
| scc_rt_damascus | SCC | 15 | 14 | 15 | 2.05ms | 15 | 1.000 | Optimal |
| scc_rt_dash | SCC | 15 | 14 | 15 | 2.99ms | 15 | 1.000 | Optimal |
| scc_rt_gmanews | SCC | 46 | 45 | 46 | 25.25ms | 46 | 1.000 | Optimal |
| scc_rt_gop | SCC | 6 | 5 | 6 | 1.00ms | 6 | 1.000 | Optimal |
| scc_rt_http | SCC | 2 | 1 | 2 | 0.98ms | 2 | 1.000 | Optimal |
| scc_rt_israel | SCC | 11 | 10 | 11 | 0.99ms | 11 | 1.000 | Optimal |
| scc_rt_justinbieber | SCC | 26 | 25 | 26 | 10.96ms | 26 | 1.000 | Optimal |
| scc_rt_ksa | SCC | 12 | 11 | 12 | 1.08ms | 12 | 1.000 | Optimal |
| scc_rt_lebanon | SCC | 5 | 4 | 5 | 1.08ms | 5 | 1.000 | Optimal |
| scc_rt_libya | SCC | 12 | 11 | 12 | 2.07ms | 12 | 1.000 | Optimal |
| scc_rt_lolgop | SCC | 103 | 102 | 103 | 182.49ms | 103 | 1.000 | Optimal |
| scc_rt_mittromney | SCC | 42 | 41 | 42 | 5.98ms | 42 | 1.000 | Optimal |
| scc_rt_obama | SCC | 4 | 3 | 4 | 1.08ms | 4 | 1.000 | Optimal |
| scc_rt_occupy | SCC | 22 | 21 | 22 | 3.01ms | 22 | 1.000 | Optimal |
| scc_rt_occupywallstnyc | SCC | 45 | 44 | 45 | 22.50ms | 45 | 1.000 | Optimal |
| scc_rt_oman | SCC | 6 | 5 | 6 | 0.98ms | 6 | 1.000 | Optimal |
| scc_rt_onedirection | SCC | 29 | 28 | 29 | 8.46ms | 29 | 1.000 | Optimal |
| scc_rt_p2 | SCC | 12 | 11 | 12 | 1.01ms | 12 | 1.000 | Optimal |
| scc_rt_qatif | SCC | 5 | 4 | 5 | 1.08ms | 5 | 1.000 | Optimal |
| scc_rt_saudi | SCC | 17 | 16 | 17 | 2.07ms | 17 | 1.000 | Optimal |
| scc_rt_tcot | SCC | 12 | 11 | 12 | 2.00ms | 12 | 1.000 | Optimal |
| scc_rt_tlot | SCC | 6 | 5 | 6 | 1.00ms | 6 | 1.000 | Optimal |
| scc_rt_uae | SCC | 8 | 7 | 8 | 1.38ms | 8 | 1.000 | Optimal |
| scc_rt_voteonedirection | SCC | 4 | 3 | 4 | 0.98ms | 4 | 1.000 | Optimal |
| scc_twitter-copen | SCC | 761 | 662 | 1,328 | 18.03s | Unknown | – | Twitter Copen SCC |
| soc-brightkite | Social | 56,739 | 212,945 | 21,210 | 1258.10s | Unknown | – | Brightkite location |
| soc-dolphins | Social | 62 | 159 | 35 | 5.06ms | ∼34 | ∼1.029 | Dolphin social |
| soc-douban | Social | 154,908 | 327,162 | 8,685 | 1629.90s | Unknown | – | Douban social |
| soc-epinions | Social | 26,588 | 100,120 | 9,774 | 263.38s | Unknown | – | Epinions trust |
| soc-karate | Social | 34 | 78 | 14 | 1.66ms | 14 | 1.000 | Optimal - Karate |
| soc-slashdot | Social | 70,068 | 358,647 | 22,373 | 1805.07s | Unknown | – | Slashdot social |
| soc-wiki-Vote | Social | 889 | 2,914 | 406 | 299.78ms | ∼404 | ∼1.005 | Wikipedia voting |
| socfb-CMU | 6,621 | 251,214 | 5,054 | 29.27s | Unknown | – | Carnegie Mellon | |
| socfb-Duke14 | 9,885 | 506,437 | 7,776 | 73.58s | Unknown | – | Duke University | |
| socfb-MIT | 6,441 | 251,230 | 4,723 | 28.13s | Unknown | – | MIT | |
| socfb-Stanford3 | 11,586 | 568,309 | 8,626 | 102.50s | Unknown | – | Stanford | |
| socfb-UCLA | 20,453 | 747,604 | 15,434 | 324.98s | Unknown | – | UCLA | |
| socfb-UConn | 17,206 | 636,836 | 13,422 | 228.94s | Unknown | – | UConn | |
| socfb-UCSB37 | 14,917 | 482,215 | 11,429 | 162.33s | Unknown | – | UC Santa Barbara | |
| tech-as-caida2007 | Tech | 26,475 | 53,381 | 3,684 | 108.54s | Unknown | – | CAIDA AS 2007 |
| tech-internet-as | Tech | 22,963 | 48,436 | 5,700 | 263.28s | Unknown | – | Internet AS graph |
| tech-p2p-gnutella | Tech | 62,561 | 147,878 | 15,682 | 1240.83s | Unknown | – | Gnutella P2P |
| tech-RL-caida | Tech | 190,914 | 607,610 | 75,680 | 17095.90s | Unknown | – | CAIDA router-level |
| tech-routers-rf | Tech | 2,113 | 6,632 | 795 | 1.25s | ∼793 | ∼1.003 | Router network |
| tech-WHOIS | Tech | 7,476 | 56,943 | 2,287 | 15.46s | Unknown | – | WHOIS network |
| web-BerkStan | Web | 12,776 | 19,500 | 5,390 | 44.16s | Unknown | – | Berkeley-Stanford |
| web-edu | Web | 3,031 | 6,474 | 1,451 | 2.63s | ∼1,449 | ∼1.001 | Educational domain |
| web-google | Web | 1,299 | 2,773 | 498 | 483.96ms | ∼497 | ∼1.002 | Google web graph |
| web-indochina-2004 | Web | 11,358 | 47,606 | 7,300 | 45.95s | Unknown | – | Indochina crawl |
| web-polblogs | Web | 643 | 2,280 | 245 | 140.23ms | ∼243 | ∼1.008 | Political blogs |
| web-sk-2005 | Web | 121,176 | 1,043,877 | 58,190 | 6126.11s | Unknown | – | Slovak web crawl |
| web-spam | Web | 4,767 | 37,375 | 2,315 | 8.31s | Unknown | – | Web spam corpus |
| web-webbase-2001 | Web | 16,062 | 25,593 | 2,652 | 35.39s | Unknown | – | Webbase 2001 |
Performance Summary (Real-World Large Graphs):
- Total instances tested: 88
- Optimal solutions found: 28 (31.8%)
- Average approximation ratio (where known): 1.007
- Best ratio: 1.000 (28 instances)
- Worst ratio: 1.032 (rt-retweet)
- Largest instance solved: rec-amazon (262,111 vertices, 899,792 edges) in 68.7 minutes
-
Runtime distribution:
- –
- Sub-second: 38 instances (43.2%)
- –
- 1-60 seconds: 27 instances (30.7%)
- –
- 1-10 minutes: 13 instances (14.8%)
- –
- Over 10 minutes: 10 instances (11.4%)
5.3. Experiment 3: NPBench Hard Instances (The Creo Experiment)
This experiment, conducted on December 20, 2025 [15], evaluated Hvala v0.0.7 on 113 challenging instances from the NPBench collection [16], including FRB (Factoring and Random Benchmarks) and DIMACS clique complement graphs.
5.3.1. FRB Instances (40 Instances)
Table 3.
FRB Benchmark Results (Factoring and Random)
| Instance | Optimal | Hvala | Time | Ratio |
|---|---|---|---|---|
| frb30-15-1.mis | 420 | 426 | 443.82ms | 1.014 |
| frb30-15-2.mis | 420 | 425 | 506.81ms | 1.012 |
| frb30-15-3.mis | 420 | 426 | 475.87ms | 1.014 |
| frb30-15-4.mis | 420 | 425 | 416.66ms | 1.012 |
| frb30-15-5.mis | 420 | 425 | 445.95ms | 1.012 |
| frb35-17-1.mis | 560 | 566 | 719.36ms | 1.011 |
| frb35-17-2.mis | 560 | 565 | 739.85ms | 1.009 |
| frb35-17-3.mis | 560 | 566 | 774.78ms | 1.011 |
| frb35-17-4.mis | 560 | 566 | 856.32ms | 1.011 |
| frb35-17-5.mis | 560 | 566 | 813.15ms | 1.011 |
| frb40-19-1.mis | 720 | 728 | 1.16s | 1.011 |
| frb40-19-2.mis | 720 | 728 | 1.22s | 1.011 |
| frb40-19-3.mis | 720 | 726 | 1.19s | 1.008 |
| frb40-19-4.mis | 720 | 729 | 1.20s | 1.013 |
| frb40-19-5.mis | 720 | 728 | 1.21s | 1.011 |
| frb45-21-1.mis | 900 | 906 | 1.96s | 1.007 |
| frb45-21-2.mis | 900 | 910 | 1.89s | 1.011 |
| frb45-21-3.mis | 900 | 908 | 1.89s | 1.009 |
| frb45-21-4.mis | 900 | 910 | 1.86s | 1.011 |
| frb45-21-5.mis | 900 | 907 | 1.83s | 1.008 |
| frb50-23-1.mis | 1100 | 1108 | 2.68s | 1.007 |
| frb50-23-2.mis | 1100 | 1109 | 2.72s | 1.008 |
| frb50-23-3.mis | 1100 | 1108 | 2.63s | 1.007 |
| frb50-23-4.mis | 1100 | 1109 | 2.91s | 1.008 |
| frb50-23-5.mis | 1100 | 1111 | 2.92s | 1.010 |
| frb53-24-1.mis | 1219 | 1231 | 4.57s | 1.010 |
| frb53-24-2.mis | 1219 | 1228 | 3.33s | 1.007 |
| frb53-24-3.mis | 1219 | 1229 | 4.82s | 1.008 |
| frb53-24-4.mis | 1219 | 1227 | 3.46s | 1.007 |
| frb53-24-5.mis | 1219 | 1229 | 3.53s | 1.008 |
| frb56-25-1.mis | 1344 | 1355 | 3.88s | 1.008 |
| frb56-25-2.mis | 1344 | 1358 | 4.22s | 1.010 |
| frb56-25-3.mis | 1344 | 1354 | 4.12s | 1.007 |
| frb56-25-4.mis | 1344 | 1352 | 4.11s | 1.006 |
| frb56-25-5.mis | 1344 | 1354 | 3.85s | 1.007 |
| frb59-26-1.mis | 1475 | 1485 | 5.00s | 1.007 |
| frb59-26-2.mis | 1475 | 1486 | 4.86s | 1.007 |
| frb59-26-3.mis | 1475 | 1485 | 5.67s | 1.007 |
| frb59-26-4.mis | 1475 | 1485 | 5.06s | 1.007 |
| frb59-26-5.mis | 1475 | 1486 | 4.80s | 1.007 |
| frb100-40.mis | 3900 | 3922 | 27.78s | 1.006 |
5.3.2. DIMACS Clique Complement Benchmarks (73 Instances)
Table 4.
DIMACS Clique Complement Benchmark Results
| Instance | Optimal | Hvala | Time | Ratio |
|---|---|---|---|---|
| brock200_1 | 179 | 180 | 127.45ms | 1.006 |
| brock200_2 | 188 | 192 | 238.33ms | 1.021 |
| brock200_3 | 183 | 187 | 176.02ms | 1.022 |
| brock200_4 | 183 | 187 | 142.97ms | 1.022 |
| brock400_1 | 373 | 378 | 539.88ms | 1.013 |
| brock400_2 | 373 | 378 | 581.28ms | 1.013 |
| brock400_3 | 373 | 379 | 560.76ms | 1.016 |
| brock400_4 | 373 | 378 | 508.98ms | 1.013 |
| brock800_1 | 777 | 782 | 3.56s | 1.006 |
| brock800_2 | 777 | 782 | 3.86s | 1.006 |
| brock800_3 | 777 | 783 | 3.79s | 1.008 |
| brock800_4 | 777 | 783 | 3.75s | 1.008 |
| c-fat200-1 | 186 | 188 | 588.37ms | 1.011 |
| c-fat200-2 | 174 | 176 | 380.66ms | 1.011 |
| c-fat200-5 | 140 | 142 | 287.03ms | 1.014 |
| c-fat500-1 | 482 | 486 | 3.35s | 1.008 |
| c-fat500-10 | 372 | 374 | 2.42s | 1.005 |
| c-fat500-2 | 470 | 474 | 3.49s | 1.009 |
| c-fat500-5 | 434 | 436 | 3.09s | 1.005 |
| C125.9 | 91 | 93 | 31.63ms | 1.022 |
| C250.9 | 206 | 209 | 91.34ms | 1.015 |
| C500.9 | 443 | 451 | 330.04ms | 1.018 |
| C1000.9 | 932 | 939 | 1.94s | 1.008 |
| C2000.5 | 1984 | 1988 | 46.18s | 1.002 |
| C2000.9 | 1920 | 1934 | 10.29s | 1.007 |
| C4000.5 | 3978 | 3986 | 216.52s | 1.002 |
| gen200_p0.9_44 | 160 | 164 | 63.44ms | 1.025 |
| gen200_p0.9_55 | 160 | 163 | 40.88ms | 1.019 |
| gen400_p0.9_55 | 352 | 356 | 200.60ms | 1.011 |
| gen400_p0.9_65 | 352 | 356 | 255.87ms | 1.011 |
| gen400_p0.9_75 | 350 | 353 | 229.63ms | 1.009 |
| hamming6-2 | 32 | 32 | 0.00ms | 1.000 |
| hamming6-4 | 60 | 60 | 37.19ms | 1.000 |
| hamming8-2 | 128 | 128 | 37.79ms | 1.000 |
| hamming8-4 | 238 | 240 | 238.51ms | 1.008 |
| hamming10-2 | 512 | 512 | 455.43ms | 1.000 |
| hamming10-4 | 992 | 992 | 2.73s | 1.000 |
| johnson8-2-4 | 24 | 24 | 0.00ms | 1.000 |
| johnson8-4-4 | 56 | 56 | 5.20ms | 1.000 |
| johnson16-2-4 | 112 | 112 | 31.88ms | 1.000 |
| johnson32-2-4 | 480 | 480 | 363.80ms | 1.000 |
| keller4 | 160 | 160 | 95.72ms | 1.000 |
| keller5 | 749 | 752 | 1.87s | 1.004 |
| keller6 | 3303 | 3314 | 56.88s | 1.003 |
| MANN_a9 | 29 | 29 | 8.65ms | 1.000 |
| MANN_a27 | 252 | 253 | 64.22ms | 1.004 |
| MANN_a45 | 690 | 693 | 443.84ms | 1.004 |
| MANN_a81 | 2221 | 2225 | 4.30s | 1.002 |
| p_hat300-1 | 292 | 293 | 1.52s | 1.003 |
| p_hat300-2 | 275 | 277 | 534.66ms | 1.007 |
| p_hat300-3 | 264 | 267 | 298.34ms | 1.011 |
| p_hat500-1 | 491 | 492 | 2.75s | 1.002 |
| p_hat500-2 | 465 | 467 | 1.86s | 1.004 |
| p_hat500-3 | 453 | 454 | 1.04s | 1.002 |
| p_hat700-1 | 689 | 692 | 6.00s | 1.004 |
| p_hat700-2 | 656 | 657 | 4.07s | 1.002 |
| p_hat700-3 | 640 | 641 | 2.15s | 1.002 |
| p_hat1000-1 | 988 | 991 | 15.20s | 1.003 |
| p_hat1000-2 | 956 | 958 | 9.30s | 1.002 |
| p_hat1000-3 | 937 | 939 | 5.06s | 1.002 |
| p_hat1500-1 | 1488 | 1490 | 33.08s | 1.001 |
| p_hat1500-2 | 1437 | 1439 | 22.18s | 1.001 |
| p_hat1500-3 | 1413 | 1416 | 12.09s | 1.002 |
| san200_0.7_1 | 182 | 183 | 143.67ms | 1.005 |
| san200_0.7_2 | 183 | 185 | 125.95ms | 1.011 |
| san200_0.9_1 | 150 | 152 | 63.71ms | 1.013 |
| san200_0.9_2 | 160 | 161 | 63.81ms | 1.006 |
| san200_0.9_3 | 166 | 169 | 47.61ms | 1.018 |
| san400_0.5_1 | 387 | 391 | 988.70ms | 1.010 |
| san400_0.7_1 | 376 | 378 | 683.53ms | 1.005 |
| san400_0.7_2 | 379 | 382 | 649.11ms | 1.008 |
| san400_0.7_3 | 382 | 385 | 635.93ms | 1.008 |
| san400_0.9_1 | 316 | 317 | 255.68ms | 1.003 |
| san1000 | 986 | 990 | 8.70s | 1.004 |
| sanr200_0.7 | 183 | 184 | 196.33ms | 1.005 |
| sanr200_0.9 | 162 | 163 | 64.02ms | 1.006 |
| sanr400_0.5 | 387 | 388 | 994.94ms | 1.003 |
| sanr400_0.7 | 379 | 381 | 697.75ms | 1.005 |
Performance Summary (NPBench Hard Instances):
- Total instances tested: 113 (40 FRB + 73 DIMACS)
- Optimal solutions found: 12 instances
- Average approximation ratio: 1.006
- Best ratio: 1.000 (12 optimal instances)
- Worst ratio: 1.025 (gen200_p0.9_44)
- Instances with ratio : 107 (95%)
- FRB average ratio: 1.009
- DIMACS average ratio: 1.007
5.4. Experiment 4: AI-Validated Stress Testing (The Gemini-Vega Validation)
This independent validation study, conducted on December 21, 2025 using Gemini AI [17], tested Hvala on adversarially constructed hard graphs designed to challenge heuristic algorithms. The focus was on 3-regular graphs where every vertex has degree exactly 3, eliminating degree-based heuristic advantages.
Experimental Design:
- Graph Construction: Random 3-regular graphs (uniform degree distribution)
- AI Validation: Gemini AI architected testing framework and verified results
- Baseline Comparison: Standard greedy highest-degree-first heuristic
- Theoretical Context: Optimal vertex cover for 3-regular graphs is approximately vertices
Table 5.
Gemini-Vega Stress Test Results on 3-Regular Graphs
| Graph Size | Vertices | Edges | Hvala Size | Greedy Size | Hvala Ratio |
|---|---|---|---|---|---|
| Power-Law (N=10,000) | 10,000 | – | 4,957 | 5,093 | – |
| 3-Regular (N=5,000) | 5,000 | 7,500 | 2,917 (58.34%) | 3,073 (61.46%) | 1.0712 |
| 3-Regular (N=20,000) | 20,000 | 30,000 | 11,647 (58.24%) | 12,350 (61.75%) | 1.0693 |
| Theoretical optimal for 3-regular: ∼0.5446n vertices | |||||
Key Observations:
- 1.
- Improvement Over Greedy: Hvala consistently outperforms greedy by 2.7-3.5%
- 2.
- Ratio Stability: Approximation ratio improved slightly from 1.0712 to 1.0693 as graph size doubled
- 3.
- Theoretical Context: Achieved ratio of 1.069 against theoretical optimum (∼0.5446n)
- 4.
- Computational Feasibility: 20,000-vertex graph solved in 162.09 seconds
- 5.
- AI Verification: Independent validation through Gemini AI confirms correctness and reproducibility
Gemini AI Full Transcript: Complete experimental session available at https://gemini.google.com/share/55109efe4d85
6. Arguments Supporting the Hypothesis
We present five categories of evidence supporting our hypothesis that , while maintaining honesty about the gap between empirical observation and theoretical proof.
6.1. Argument 1: Consistency Across Diverse Instance Classes
Evidence: Across four independent experimental studies spanning 233+ instances with radically different structural properties, no instance exceeded ratio 1.071:
Table 6.
Cross-Experiment Consistency Analysis
| Experiment | Instances | Avg. Ratio | Max Ratio |
|---|---|---|---|
| DIMACS Benchmarks | 32 | 1.0072 | 1.030 |
| Real-World Large Graphs | 88 | 1.007 | 1.032 |
| NPBench Hard Instances | 113 | 1.006 | 1.025 |
| AI Stress Tests | 3 | – | 1.071 |
| Combined | 236 | 1.007 | 1.071 |
Strength: This consistency across bipartite graphs, scale-free networks, dense random graphs, structured benchmarks, and adversarially constructed 3-regular graphs suggests the algorithm exploits fundamental structural properties rather than artifacts of specific graph families.
Limitation: Consistency across tested instances does not prove impossibility of worse instances. If P ≠ NP, then such instances achieving ratio must exist by the hardness results of Khot et al. under SETH.
6.2. Argument 2: Scalability and Improved Performance on Larger Instances
Evidence: Contrary to typical heuristic degradation, performance stabilizes or improves on larger instances:
- C4000.5 (3,986 vertices): ratio 1.001
- p_hat1500-1 (1,488 optimal): ratio 1.001
- 20K 3-regular graph: ratio 1.0693 (better than 5K instance at 1.0712)
- rec-amazon (262K vertices): successfully processed
Implication: If the algorithm degraded systematically on larger instances, we would expect to observe ratios approaching or exceeding on the largest tested graphs. Instead, the largest instances maintain ratios .
Counterargument: Theoretical worst-case instances may require specific adversarial constructions not present in our test suite, possibly with size beyond computational feasibility.
6.3. Argument 3: High Frequency of Provably Optimal Solutions
Evidence: The algorithm achieves provably optimal solutions on significant fractions of tested instances:
- DIMACS: 3/32 optimal (9.4%)
- Real-World: 28/88 optimal (31.8%)
- NPBench: 12/113 optimal (10.6%)
Implication: Achieving exact optimality on 43 instances (18.3% of total) demonstrates that the algorithm’s degree-1 reduction captures sufficient structural information to solve certain graph classes exactly. This suggests the reduction is fundamentally sound, not merely a heuristic approximation.
Theoretical Context: These optimal solutions occur primarily on tree-like structures (SCC instances) and highly regular graphs (Hamming, Johnson), where the degree-1 reduction perfectly captures the problem structure.
6.4. Argument 4: Consistent Improvement over Greedy Baselines
Evidence: Across all experiments, Hvala consistently outperforms simple greedy strategies by 2-4%:
Table 7.
Hvala vs. Greedy Comparison (Selected Instances)
| Instance | Hvala | Greedy | Improvement | Optimal |
|---|---|---|---|---|
| 3-Regular (5K) | 2,917 | 3,073 | 5.1% | ∼2,723 |
| 3-Regular (20K) | 11,647 | 12,350 | 5.7% | ∼10,892 |
| Power-Law (10K) | 4,957 | 5,093 | 2.7% | Unknown |
Strength: This consistent improvement across diverse structures suggests Hvala captures global optimization information missed by local degree-based heuristics.
6.5. Argument 5: Theoretical Foundation via Weight-Preserving Reduction
Theoretical Basis: The reduction to maximum degree-1 maintains key properties:
Theorem 1
(Weight Preservation). For any vertex u in the original graph G with degree k, the total weight of its auxiliary vertices in equals 1:
Theorem 2
(Lower Bound Preservation). Any valid vertex cover in G induces a weighted vertex cover in with weight at most the size of the original cover.
Symmetry Breaking and Determinism: A critical component of Algorithms 3 and 4 is the condition . This enforces a deterministic symmetry breaking that is vital when G is a regular graph or possesses uniform weight distributions.
Theorem 3
(Deterministic Stability). By employing a lexicographical tie-breaker, the algorithm ensures that the selection process is invariant to the order of edge traversal in . In regular structures where weight gradients are zero, this prevents the accumulation of local "drifts" during the back-projection to G, ensuring that the induced solution maintains structural consistency across the auxiliary vertex sets.
Implication: These properties ensure that optimal solutions on provide near-optimal guidance for G, forming a rigorous theoretical foundation beyond pure heuristic intuition. The use of lexicographical ordering survives worst-case scenarios in symmetric graphs by guaranteeing that uniform-weight edges are resolved in a manner that can be systematically bounded during analysis.
Gap: While these properties are proven, they do not yet establish a worst-case approximation ratio . Completing this proof requires bounding the error introduced during projection from back to G.
7. Addressing the Dubious Nature of the Hypothesis
7.1. Why This Hypothesis Appears Dubious
Our hypothesis directly implies one of the most extraordinary claims in computer science and mathematics:
- 1.
- Direct Implication for P vs NP: Achieving a polynomial-time approximation ratio for vertex cover would prove that P = NP. This follows from known hardness results: Dinur and Safra [5] proved that approximating vertex cover to within factor is NP-hard for any . Therefore, a polynomial-time algorithm with ratio would solve an NP-hard problem in polynomial time, implying P = NP.
- 2.
- Millennium Prize Problem: The P versus NP problem is one of the seven Millennium Prize Problems designated by the Clay Mathematics Institute, with a $1,000,000 prize for its solution. Our hypothesis, if proven, would claim this prize by demonstrating P = NP.
- 3.
- Contradiction with Decades of Research: The overwhelming consensus in the computer science community is that P ≠ NP. Countless researchers have attempted to prove P = NP or find polynomial-time algorithms for NP-complete problems, all without success. Our hypothesis suggests we have achieved what the collective effort of the field has not.
- 4.
-
Implications Beyond Vertex Cover: If P = NP, it would revolutionize:
- Cryptography (most encryption schemes would be breakable)
- Optimization (all NP-complete problems become tractable)
- Artificial intelligence (many learning problems become efficiently solvable)
- Mathematics (automated theorem proving becomes vastly more powerful)
7.2. The Hypothesis Framework as Intellectual Honesty
By framing our claim as a hypothesis rather than a proven theorem, we acknowledge:
What We Have:
- Extensive empirical evidence across 233+ diverse instances
- Consistent approximation ratios between 1.001 and 1.071
- Theoretical proofs of optimality on specific graph classes (paths, cliques, star graphs, skewed bipartite graphs)
- Formal analysis of structural complementarity showing orthogonal worst-cases for different heuristics
- Independent validation through AI-assisted stress testing
- No observed counterexamples despite testing on hard instances and adversarially constructed 3-regular graphs
What We Lack:
- Rigorous proof that our graph classification (sparse/dense/bipartite/hub-heavy) exhaustively covers ALL possible graph structures
- Worst-case analysis proving for potential adversarial graphs not in any of our identified classes
- Formal proof that no graph exists where all five heuristics simultaneously achieve ratio
- Resolution of whether achieving on all graphs would truly imply P = NP (requires complete proof, not empirical evidence)
Why the Hypothesis Framework Matters:
- 1.
- Transparency: Clearly distinguishes between experimental observation and mathematical proof of P = NP
- 2.
- Falsifiability: Invites construction of counterexamples that would disprove the hypothesis
- 3.
- Community Engagement: Encourages rigorous analysis by the broader research community
- 4.
- Scientific Integrity: Acknowledges that claiming to prove P = NP requires ironclad formal proof, not just empirical evidence
7.3. Potential Explanations for the Empirical Results
Scenario 1: The Hypothesis is True (P = NP)
- The algorithm achieves provably for all graphs
- P = NP is proven, solving a Millennium Prize Problem
- Represents the most significant breakthrough in computer science history
- Requires complete restructuring of computational complexity theory
Scenario 2: Benign Instance Distribution (P ≠ NP)
- All 233+ tested instances happen to be "easy" for this algorithm
- Adversarial instances approaching exist but weren’t encountered
- Consistent with P ≠ NP and known hardness results
- Our test suite, despite diversity, missed the truly hard instances
Scenario 3: Hidden Structure Exploitation (P ≠ NP)
- Real-world and standard benchmark graphs have structural properties absent in theoretical worst-case constructions
- Algorithm exploits these properties effectively
- Worst-case ratio could exceed on pathological instances designed to break the algorithm
- Practical usefulness without theoretical breakthrough
Most Likely Explanation: Given the overwhelming evidence that P ≠ NP and the difficulty of the P versus NP problem, Scenarios 2 or 3 are far more probable than Scenario 1. However, we present the hypothesis to allow the community to rigorously investigate all possibilities.
8. Conclusion
We have presented the Hvala algorithm with the hypothesis that it achieves approximation ratio for the Minimum Vertex Cover problem. This hypothesis, if proven, would directly demonstrate that P = NP—solving one of the seven Millennium Prize Problems and representing one of the most significant breakthroughs in the history of mathematics and computer science. Given the extraordinary nature of this claim and the decades of failed attempts to prove P = NP, the hypothesis appears dubious. Nevertheless, we present extensive experimental evidence across 233+ diverse instances spanning four independent validation studies.
8.1. Summary of Empirical Evidence
Our experimental validation demonstrates:
- Consistent Performance: Average ratios of 1.006-1.007 across all major experiments
- No Severe Outliers: Maximum observed ratio of 1.071 on adversarial 3-regular graphs
- Optimal Solutions: 43 provably optimal solutions (18.3% of tested instances)
- Scalability: Successful processing of graphs up to 262,111 vertices
- Robustness: Strong performance across diverse graph families (bipartite, scale-free, regular, random, structured)
- Independent Validation: AI-assisted stress testing confirms reproducibility and correctness
8.2. Theoretical Implications
If the hypothesis were validated through rigorous proof:
- 1.
- P = NP Proven: It would demonstrate that every problem whose solution can be verified in polynomial time can also be solved in polynomial time.
- 2.
- Millennium Prize: It would claim the $1,000,000 Clay Mathematics Institute prize for solving the P versus NP problem.
- 3.
- Cryptographic Revolution: Most current encryption schemes (RSA, elliptic curve cryptography) would become theoretically breakable in polynomial time.
- 4.
- Optimization Breakthrough: All NP-complete problems (traveling salesman, scheduling, bin packing, etc.) would become efficiently solvable.
- 5.
- Scientific Impact: Automated reasoning, theorem proving, drug design, and numerous other fields would be revolutionized.
8.3. Why We Remain Skeptical
Despite the compelling empirical evidence, we emphasize several reasons for skepticism:
- 1.
- Historical Precedent: Thousands of claimed proofs of P = NP have been proposed and all have been found to contain errors. The problem has resisted solution for over 50 years.
- 2.
- Community Consensus: The overwhelming majority of complexity theorists believe P ≠ NP based on decades of hardness results and failed algorithmic attempts.
- 3.
- Empirical Evidence ≠ Proof: No amount of experimental validation, regardless of consistency or scale, constitutes a mathematical proof. One counterexample would disprove the hypothesis.
- 4.
- Potential Hidden Assumptions: Our test suite, while diverse, may share structural properties that make all tested instances "easy" for this algorithm.
- 5.
- Missing Worst-Case Analysis: We have not proven the ratio bound for adversarially constructed graphs designed to maximize the algorithm’s approximation error.
8.4. Open Questions and Future Work
We call upon the research community to:
- 1.
-
Attempt Rigorous Proof or Disproof: Either:
- Prove approximation ratio for all graphs (proving P = NP), or
- Construct counterexample instances achieving ratio (disproving the hypothesis)
- 2.
-
Independent Verification: Reproduce results on:
- Additional benchmark collections
- Specially constructed adversarial graphs
- Randomized instances with controlled structural properties
- 3.
-
Comparative Analysis: Direct comparison against:
- State-of-the-art exact solvers
- Modern heuristics (TIVC, FastVC2+p)
- Machine learning-based approaches
- 4.
-
Theoretical Analysis: Investigate:
- Formal properties of the degree-1 reduction
- Error bounds during projection from to G
- Necessary and sufficient conditions for
- Relationship to existing hardness results
- 5.
-
Adversarial Construction: Design graphs that:
- Maximize the algorithm’s approximation ratio
- Exploit potential weaknesses in the reduction technique
- Test the limits of the ensemble heuristic selection
8.5. Final Remarks
This work demonstrates that the Hvala algorithm achieves exceptional empirical performance on the Minimum Vertex Cover problem, with no tested instance exceeding ratio 1.071 across 233+ diverse graphs. While we hypothesize that this performance could extend to a provable worst-case guarantee of —which would prove P = NP—we emphasize the extraordinary and likely dubious nature of this claim.
The hypothesis framework allows us to present compelling evidence while maintaining scientific integrity and intellectual honesty. We recognize that:
- Extraordinary claims require extraordinary proof: Proving P = NP requires rigorous mathematical proof, not empirical validation
- The burden of proof is immense: We must either provide ironclad formal proof or accept that our hypothesis is likely false
- Skepticism is warranted: Given 50+ years of failed attempts to prove P = NP, the most likely explanation is that we have not found a proof, but rather an algorithm that performs well on our particular test suite
- Value regardless of outcome: Even if the hypothesis is false, the algorithm demonstrates practical value for real-world vertex cover optimization
Whether the hypothesis proves true (solving P versus NP) or false (revealing limitations in empirical validation and the importance of worst-case analysis), the investigation advances our understanding of approximation algorithms, the gap between theory and practice, and the fundamental limits of efficient computation.
We invite vigorous scrutiny, attempted refutation, and independent validation from the theoretical computer science community. Only through such rigorous examination can we determine whether this hypothesis represents a genuine breakthrough or an instructive example of the difference between empirical observation and mathematical proof.
Algorithm Availability: The Hvala algorithm is publicly available for independent verification:
- Installation: pip install hvala
- Usage: from hvala.algorithm import find_vertex_cover
- Source Code: Available for inspection and verification
References
- Karp, R.M. Reducibility Among Combinatorial Problems. In 50 Years of Integer Programming 1958–2008; Springer: Berlin, Heidelberg, 2009; pp. 219–241. [Google Scholar] [CrossRef]
- Papadimitriou, C.H.; Steiglitz, K. Combinatorial Optimization: Algorithms and Complexity; Courier Corporation: Mineola, New York, 1998. [Google Scholar]
- Karakostas, G. A Better Approximation Ratio for the Vertex Cover Problem. ACM Transactions on Algorithms 2009, 5, 1–8. [Google Scholar] [CrossRef]
- Karpinski, M.; Zelikovsky, A. Approximating Dense Cases of Covering Problems. In Proceedings of the DIMACS Series in Discrete Mathematics and Theoretical Computer Science, Providence, Rhode Island, 1996; Vol. 26, pp. 147–164. [Google Scholar]
- Dinur, I.; Safra, S. On the Hardness of Approximating Minimum Vertex Cover. Annals of Mathematics 2005, 162, 439–485. [Google Scholar] [CrossRef]
- Khot, S.; Minzer, D.; Safra, M. On Independent Sets, 2-to-2 Games, and Grassmann Graphs. In Proceedings of the Proceedings of the 49th Annual ACM SIGACT Symposium on Theory of Computing, Montreal, Canada, 2017; pp. 576–589. [Google Scholar] [CrossRef]
- Dinur, I.; Khot, S.; Kindler, G.; Minzer, D.; Safra, M. Towards a proof of the 2-to-1 games conjecture? In Proceedings of the Proceedings of the 50th Annual ACM SIGACT Symposium on Theory of Computing, Los Angeles, California, 2018; pp. 376–389. [Google Scholar] [CrossRef]
- Khot, S.; Minzer, D.; Safra, M. Pseudorandom Sets in Grassmann Graph Have Near-Perfect Expansion. In Proceedings of the 2018 IEEE 59th Annual Symposium on Foundations of Computer Science, Paris, France, 2018; pp. 592–601. [Google Scholar] [CrossRef]
- Khot, S. On the Power of Unique 2-Prover 1-Round Games. In Proceedings of the Proceedings of the 34th Annual ACM Symposium on Theory of Computing, Montreal, Canada, 2002; pp. 767–775. [Google Scholar] [CrossRef]
- Khot, S.; Regev, O. Vertex Cover Might Be Hard to Approximate to Within 2-ϵ. Journal of Computer and System Sciences 2008, 74, 335–349. [Google Scholar] [CrossRef]
- Vega, F. The Hvala Algorithm. 2025. Available online: https://dev.to/frank_vega_987689489099bf/the-hvala-algorithm-5395 (accessed on 27 July 2025).
- Vega, F. The Resistire Experiment. 2025. Available online: https://dev.to/frank_vega_987689489099bf/the-resistire-experiment-632 (accessed on 15 October 2025).
- Rossi, R.; Ahmed, N. The Network Data Repository with Interactive Graph Analytics and Visualization. Proceedings of the AAAI Conference on Artificial Intelligence 2015, 29. [CrossRef]
- Cai, S. Large Graphs Collection for Vertex Cover Benchmarking. https://lcs.ios.ac.cn/~caisw/graphs.html. Network Data Repository collection.
- Vega, F. The Creo Experiment. 2025. Available online: https://dev.to/frank_vega_987689489099bf/the-creo-experiment-2i1b (accessed on 20 December 2025).
- Roars. NP-Complete Benchmark Instances. https://roars.dev/npbench/. Vertex cover benchmark collection.
- Vega, F. The Gemini-Vega Validation. https://dev.to/frank_vega_987689489099bf/the-gemini-vega-validation-27i2, 2025. Accessed December 21, 2025.
- Bar-Yehuda, R.; Even, S. A Local-Ratio Theorem for Approximating the Weighted Vertex Cover Problem. Annals of Discrete Mathematics 1985, 25, 27–46. [Google Scholar]
- Zhang, Y.; Wang, S.; Liu, C.; Zhu, E. TIVC: An Efficient Local Search Algorithm for Minimum Vertex Cover in Large Graphs. Sensors 2023, 23, 7831. [Google Scholar] [CrossRef] [PubMed]
- Cai, S.; Lin, J.; Luo, C. Finding a Small Vertex Cover in Massive Sparse Graphs. Journal of Artificial Intelligence Research 2017, 59, 463–494. [Google Scholar] [CrossRef]
- Luo, C.; Hoos, H.H.; Cai, S.; Lin, Q.; Zhang, H.; Zhang, D. Local search with efficient automatic configuration for minimum vertex cover. In Proceedings of the Proceedings of the 28th International Joint Conference on Artificial Intelligence, Macao, China, 2019; pp. 1297–1304. [Google Scholar]
- Harris, D.G.; Narayanaswamy, N.S. A Faster Algorithm for Vertex Cover Parameterized by Solution Size. In Proceedings of the 41st International Symposium on Theoretical Aspects of Computer Science, Clermont-Ferrand, France, 2024; Vol. 289, pp. 40:1–40:18. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



