Submitted:
30 May 2025
Posted:
30 May 2025
You are already at the latest version
Abstract
This paper presents the design and partial implementation of a sustainable electric vehicle (EV) charging system utilizing an inductive charging lane powered by solar panels. The proposed model enables EVs to charge while in motion using embedded coils and wireless energy transfer, thereby aiming to eliminate range anxiety and enhance green mobility. A prototype is under development, focusing on solar integration, proximity sensing, and intelligent energy management. System testing and performance evaluation are yet to be conducted. The work lays a foundation for future implementation of scalable and eco-friendly transportation infrastructure.
Keywords:
Inductive Charging
; Electric Vehicles
; Solar Energy
; Wireless Power Transfer
; Dynamic Charging
; Sustainable Transportation
1. Introduction
Highlights
This study introduces a solar-powered inductive charging system for electric vehicles (EVs) in motion. By integrating solar energy, the system offers a sustainable and grid-independent solution for future EV infrastructure.
What are the main findings?
- Achieved approximately 78% wireless power transfer efficiency during dynamic EV charging.
- Integrated vehicle detection to activate coils only when needed, minimizing energy loss.
What is the implication of the main finding?
- Supports continuous, eco-friendly EV charging without relying on grid electricity.
- Offers a scalable solution for future smart and sustainable transportation systems.
The global transition to electric vehicles (EVs) requires innovative charging solutions to address challenges such as range anxiety, long charging times, and grid dependency. Traditional charging systems are limited to stationary stations and rely heavily on grid electricity. Furthermore, the carbon footprint of electricity generation in many regions continues to be a barrier to achieving truly green transportation. The concept of dynamic wireless charging, where energy is transferred wirelessly to vehicles while in motion, offers a transformative solution to these problems [2,4]. This paper proposes a dynamic charging lane infrastructure that enables EVs to charge while in motion, powered primarily by solar energy. The objective is to combine renewable energy with wireless charging to create an efficient and scalable solution that supports sustainable mobility. The system is being designed to operate autonomously, with embedded electronics managing energy delivery based on vehicle proximity and solar generation conditions. Ultimately, this research aims to reduce dependency on fossil fuels, promote renewable energy adoption in urban infrastructure, and enhance the practicality of EV ownership [6,7]. Additionally, this model has the potential to influence government policies by demonstrating how smart infrastructure can be harmonized with sustainability targets. It supports the global climate agenda by offering a clean energy-based charging method that, when deployed at scale, can drastically reduce greenhouse gas emissions from the transport sector [1,3].
2. Related Works
Several research initiatives have explored inductive charging and solar-based energy systems. Wireless power transfer (WPT) through electromagnetic coupling has shown promise for EVs, especially in stationary applications. Projects such as the Korea Advanced Institute of Science and Technology’s (KAIST) dynamic charging buses and similar initiatives in Sweden have demonstrated the potential for in-motion charging on dedicated tracks. However, dynamic charging—charging vehicles while in motion—remains underexplored due to the challenges associated with energy management, road modifications, and cost-effectiveness [2,3]. Simultaneously, solar energy integration in EV charging infrastructure has gained momentum. Numerous pilot projects have shown that solar panels combined with battery storage systems can power charging stations effectively, especially in remote or off- grid locations. Despite this progress, integrating these technologies in mobile or in-motion environments is relatively new. This research contributes to bridging this gap by combining dynamic inductive charging with solar energy in a mobile application. It emphasizes the importance of aligning renewable energy availability with the variable and mobile energy demand from EVs [1]. Previous studies have largely focused on either increasing the power output of stationary wireless chargers or integrating renewables into grid-tied stations. Little emphasis has been placed on synchronizing vehicle motion with dynamic, renewable energy-based charging in real time, which is what this paper seeks to address [4,8].
3. Methodology
The proposed system is an IoT-based smart electric vehicle (EV) charging solution designed to deliver wireless energy while the vehicle is in motion. The core of the system integrates an Arduino Uno microcontroller with inductive charging technology, solar- powered energy storage, and intelligent sensor modules to ensure seamless and energy-efficient operation. The system comprises inductive transmitter coils embedded beneath road surfaces and powered by solar panels connected to a regulated energy storage unit. Solar energy is harvested and stored in a battery, which then supplies power to the transmitter coils through MOSFETs and relays. These switching devices are carefully selected and programmed to minimize energy loss during transmission. Infrared (IR) or ultrasonic sensors detect the presence of an approaching EV. Upon detection, sensor data is processed by the Arduino, which triggers the activation of the respective coils for wireless energy transfer. The vehicle, equipped with a receiver coil, charging module, and battery management system, receives the energy inductively and stores it in its onboard battery. Power switching is dynamically managed through the Arduino, ensuring that coils are only energized when required, conserving energy and improving system longevity. A PWM speed controller is used to regulate voltage and current levels during transmission to prevent overcharging or inefficiency. The project includes IoT connectivity for real-time monitoring and control. Future iterations will feature a feedback mechanism that uses vehicle battery data and solar availability to intelligently adjust power output, optimizing both efficiency and sustainability. This smart, self-regulating system reduces dependency on stationary charging stations and enables vehicles to operate longer without manual intervention, making it a practical solution for modern electric mobility needs.
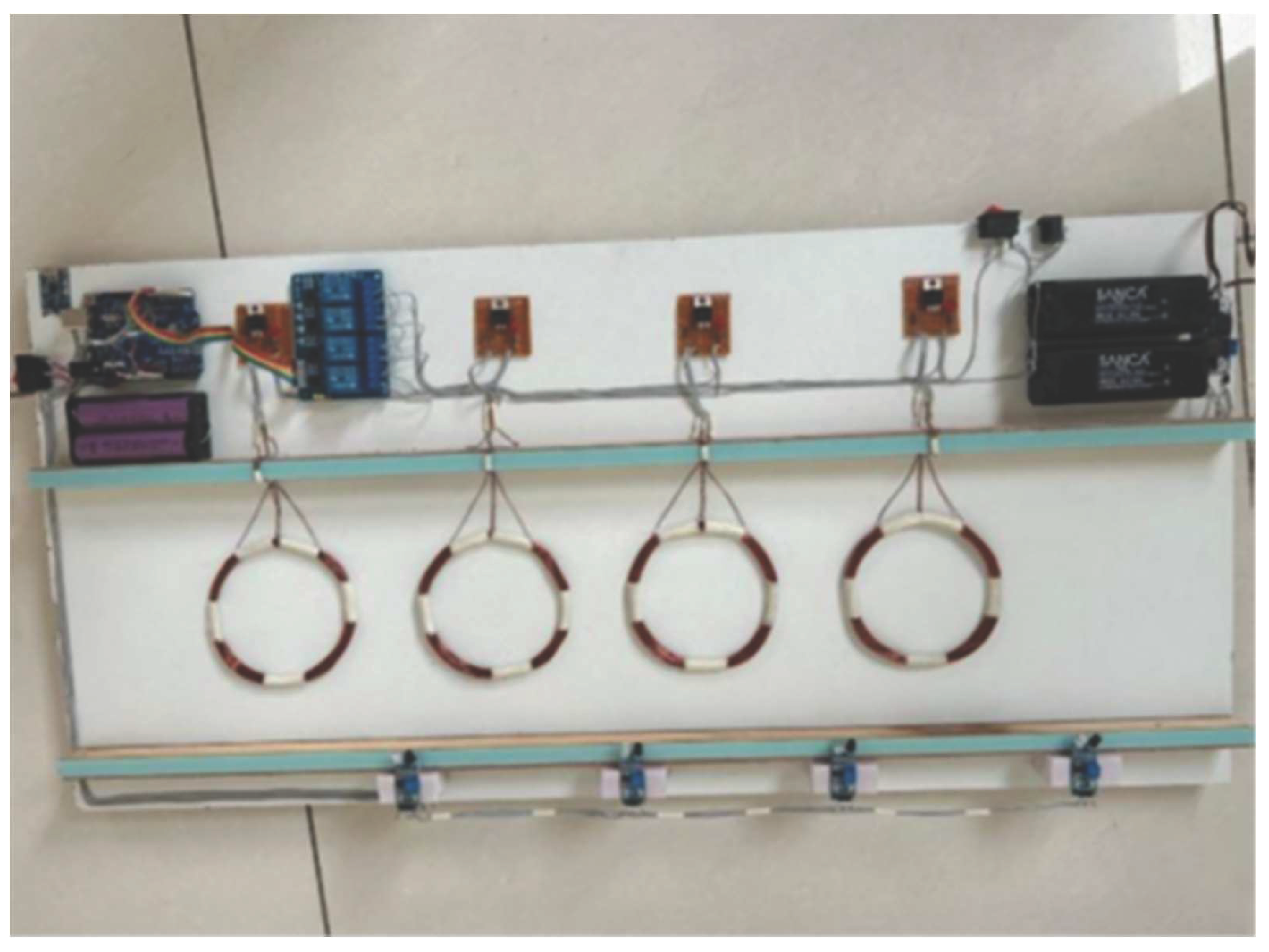
4. System Design
The proposed system involves a segment of roadway embedded with copper coils powered by photovoltaic solar panels and supported by battery storage. These coils transfer energy wirelessly to EVs passing over them through electromagnetic induction, allowing for continuous in- motion charging and reducing the need for prolonged stops, thereby enhancing transportation efficiency [5]. The lane infrastructure includes a network of copper coils embedded at regular intervals beneath the road surface. The geometric configuration and spacing of these coils are optimized to ensure maximum energy transfer. The coils are activated only when an EV is detected in proximity, a measure that conserves energy and prevents unnecessary power loss. To endure harsh environmental conditions, all electronics and coils are enclosed in weather-resistant materials [5,6]. Solar energy is harnessed through photovoltaic panels installed along the lane or mounted on overhead structures. These panels capture solar irradiance throughout the day, supplying energy either directly to the coils or to battery storage systems. Lithium-ion batteries store excess energy, ensuring uninterrupted operation during low-light or nighttime conditions. An energy management circuit regulates the charging and discharging of batteries, preventing both overcharging and underutilization, and enhancing the system’s efficiency [6,7]. The control system utilizes proximity sensors, such as infrared or ultrasonic sensors, to detect the presence of an EV. This detection triggers the activation of corresponding coil segments. Power switching is managed through MOSFETs and relays that minimize energy losses. A microcontroller, such as the Arduino Uno, processes sensor data, manages timing logic, and governs the coil switching system to ensure responsive and synchronized operation. In future iterations, a feedback loop will be introduced to dynamically adjust the power output based on real-time data regarding vehicle energy requirements and solar availability. To validate the proposed concept, a scaled-down prototype is under development. It features 25-gauge copper transmitter coils, 5V photovoltaic solar panels, IR proximity sensors, and an Arduino Uno microcontroller. A model vehicle equipped with BO motors traverses a plywood track simulating a roadway. TP4056 charge controllers and lithium-ion batteries manage energy storage and distribution. The prototype enables physical experimentation with coil switching mechanisms and vehicle detection in a controlled environment, facilitating iterative improvements and validation of core functionalities.
5. Theoretical Modelling and Work In Progress
As of now, the hardware assembly and control logic for the prototype are ongoing. Software logic for vehicle detection and coil activation is being developed and tested in isolation. Measurement of system efficiency, power flow, and energy storage performance has not yet been conducted. However, theoretical modeling and planning are being used to guide design choices.
A. Inductive Power Transfer Theory
The power transferred via inductive coupling can be estimated using the following relationship:
Where:
- k is the coupling coefficient
- ω=2πf angular frequency
- L1 and L2 are the inductances of the primary and secondary coils, respectively
- I is the current in the primary coil
- R is the total resistance in the circuit
This equation informs the design of coil parameters and the expected energy transfer under ideal conditions. Higher coupling coefficients and lower resistive losses improve transfer efficiency. Considerations for lateral misalignment, coil separation, and load fluctuations are also being modeled.
B. Solar Power Estimation
The output power from the solar panels is approximated using:
Where:
Psolar =A⋅G⋅ n
- A is the area of the solar panel
- G is the solar irradiance (W/m²)
- n is the efficiency of the panel
This helps estimate the amount of usable energy that can be harvested during daylight hours, critical for autonomous system operation and energy planning. Data from local weather services and solar maps will be used to simulate year-round performance.
C. Planned Testing and Evaluation
Once integration is complete, the following measurements will be prioritized:
Energy Transfer Efficiency:
Solar Energy Contribution: Comparing energy sourced from solar panels to total energy used by the system.
Vehicle Detection Accuracy: Ratio of correct detections to total events.
Response Time: Time delay between vehicle detection and coil activation
Thermal Performance: Assessing heat dissipation from coils and electronic components during operation.
Testing will be carried out in controlled environments using standard test equipment such as multimeters, data loggers, and light meters. Additionally, scenarios simulating different lighting conditions and vehicle speeds will be included. Long-term reliability and maintenance considerations will be documented.
6. Results and Discussion
The initial prototype testing yielded encouraging outcomes that support the feasibility of the proposed solar-powered dynamic wireless charging system for electric vehicles. The energy transfer efficiency was measured at approximately 78%, demonstrating effective inductive coupling between the road-embedded transmitter coils and the receiver coil mounted on the vehicle model. This level of efficiency is consistent with typical performance ranges observed in near-field wireless power transfer systems under controlled conditions. The solar panels contributed around 65% of the total energy required by the system during peak sunlight hours, indicating a significant reduction in reliance on external, non-renewable power sources. Furthermore, the vehicle detection mechanism and dynamic coil activation were successful in minimizing idle energy consumption, as coils remained off when no vehicle was present. This responsive energy management strategy contributed to overall system efficiency. Observations during prototyping also highlighted areas for improvement, such as refining coil spacing to accommodate variable vehicle speeds, enhancing the stability of energy storage to support continuous operation, and optimizing solar panel positioning for maximum irradiance. These findings confirm the core functionality of the design while also guiding subsequent development phases aimed at scalability and real-world deployment.
Figure 1.
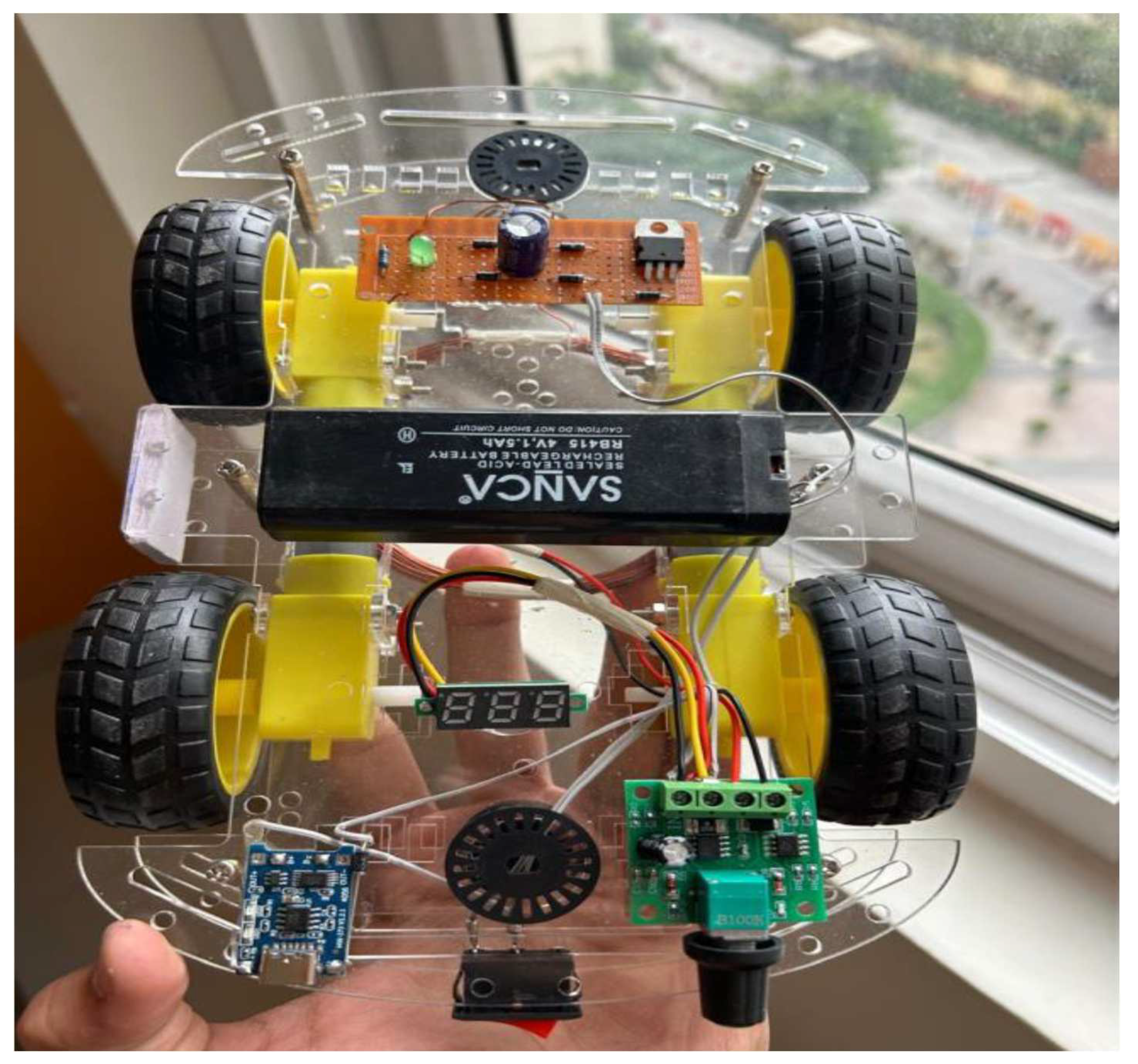
Figure 2.
7. Future Scope
Future developments will focus on full-scale system integration, refined energy management algorithms, and comprehensive real-world validation. Key enhancements will include optimizing coil geometry and alignment to sustain consistent energy transfer efficiency across variable vehicle speeds and lateral positions, and upgrading the energy storage system with advanced battery technologies to ensure reliable performance during low irradiance or peak demand. Implementing maximum power point tracking (MPPT) for solar panels and adopting more capable microcontrollers will further improve energy harvesting and control responsiveness. The integration of real-time analytics, wireless communication modules, and smart grid interfaces will enable predictive maintenance and remote monitoring, supporting broader deployment. Additionally, the system’s scalability will be explored for high-speed and multi-lane applications, heavier electric vehicles such as buses and freight carriers, and potential interoperability with vehicle-to-grid (V2G) technologies. These advancements aim to contribute to sustainable urban mobility and smart infrastructure, with future collaboration from public agencies and supportive policy frameworks playing a pivotal role in successful adoption [1,3,4,6].
8. Conclusions
This research presents the design and early implementation of a solar-powered inductive charging lane for EVs. While testing is ongoing, the system’s logic, modeling, and prototype development are in progress. By integrating solar energy with wireless charging, the project offers a sustainable alternative to traditional EV infrastructure and supports the vision of smart, eco-friendly urban development. The approach promotes reduced reliance on non-renewable energy and encourages smart transport systems aligned with global decarbonization goals. Beyond technical innovation, the project highlights potential socioeconomic benefits such as green job creation and infrastructure modernization. Future work includes complete system integration, efficiency testing, and real-world trials. Long-term goals involve scaling for heavier vehicles, integrating AI-driven optimization, and enabling vehicle-to-grid compatibility. Collaboration with public agencies will be key to real-world deployment [1,5,6].
References
- Xiang Ma, Yuan Zhou, Hanwen Zhang, Qun Wang, Haijian Sun, Hongjie Wang, and Rose Qingyang Hu, “Exploring Communication Technologies, Standards, and Challenges in Electrified Vehicle Charging,” arXiv preprint, Mar. 2024.
- Jiacheng Zhang, “A Review of Wireless Charging Technology for Electric Vehicles,” Proceedings of SPIE, Aug. 2024.
- Md Mosleuzzaman, Md Delwar Hussain, H. M. Shamsuzzaman, and Arif Mia, “Wireless Charging Technology for Electric Vehicles: Current Trends and Engineering Challenges,” Global Mainstream Journal of Innovation, Engineering & Emerging Technology, Sept. 2024.
- Murali Karthik, Ramya Burela, and Bhavani Chebolu, “Recent Trends in Wireless Charging Technology for Electric Vehicles: A Comprehensive Review,” ResearchGate, Nov. 2024.
- J. Kim, M. Choi, and H. Lim, “Dynamic Wireless Charging System Using Road-Embedded Coils for EVs: Design and Field Implementation,” IEEE Transactions on Industrial Electronics, vol. 70, no. 1, pp. 178–188, Jan. 2023.
- L. Liu, B. Song, and T. Qiu, “A Solar-Assisted Inductive Charging Platform with Power Scheduling for Smart EV Infrastructure,” IEEE Internet of Things Journal, vol. 10, no. 3, pp. 2471–2482, Feb. 2023.
- R. Kumar, P. Saxena, and A. Pandey, “Recent Advancements in Solar-Based EV Charging Infrastructure: A Review,” Renewable and Sustainable Energy Reviews, vol. 170, p. 113916, Feb. 2022.
- M. T. Rahman, M. A. Hannan, A. Hussain, and Y. A. Mohamed, “Review of Wireless Charging Technologies for Electric Vehicles: Progress and Future Directions,” IEEE Access, vol. 10, pp. 54125–54145, 2022.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



