
Submitted:
29 May 2025
Posted:
30 May 2025
You are already at the latest version
Abstract
The convergence of artificial intelligence (AI) and robotics has brought about a fresh period of autonomous systems able of executing sophisticated jobs in changing and unpredictable settings. Although great advancements have been achieved, a multitude of unresolved mathematical issues limits the use of AI-driven robots in safety-critical and real-world uses. Focusing on robustness, safety, learning, human-robot interaction, and complicated system management, this study investigates several important unresolved concerns at the crossroads of AI, control theory, and mathematics. Creating intelligent, dependable, and trustworthy autonomous robots depends on addressing these obstacles. Several influential open problems are introduced within the folds of this paper, with final thoughts on mathematizing AI-driven robot control.
Keywords:
Artificial intelligence (AI)
; AI-driven robots
; AI
; machine learning
; robotics
; reinforcement learning (RL)
; Deep neural networks (DNNs)
1. Introduction
Advances in artificial intelligence—especially machine learning—are propelling a major change in the field of robotics. Mostly grounded in classical control theory, conventional robot control often depends on exact models and controlled surroundings (Such as The convergence of artificial intelligence (AI) ) and robotics has produced a new era of autonomous systems capable of performing complex tasks in dynamic and unexpected environments.(Kim et al., 2022). Although significant innovations have been made, several unsolved mathematical problems restrict the application of AI-driven robots in safety-sensitive and real-world scenarios, as in Figure 1 (c.f., Kim et al., 2022).
Emphasizing robustness, safety, learning, human-robot interaction, and sophisticated system management, this research explores multiple critical still unanswered questions at the intersection of artificial intelligence, control theory, and mathematics (Kim et al., 2022). Building very intelligent, reliable, and trustworthy autonomous robots (Cantucci et al., 2025) depends on overcoming these challenges. But actual situations are naturally complicated, unpredictable, and dynamic, requiring more clever and flexible control systems. With its capacity to learn from data (Kim et al., 2022), detect sophisticated patterns, and make decisions under ambiguity, artificial intelligence provides a great toolbox for tackling these problems.
Broad range of approaches including reinforcement learning (Beck et al., 2025; Jensen, 2023), deep learning for perception and decision-making (Aljamal et al., 2025), imitation learning, and various forms of adaptive control define AI-driven robot control. From negotiating unsorted surfaces to executing complex manipulating tasks (Manikandan et al., 2025), these approaches have allowed robots to accomplish amazing tasks.
Still, the change from managed laboratory environments to large-scale actual application exposes basic theoretical and mathematical deficiencies(Manikandan et al., 2025). This document seeks to outline some of these important unresolved issues, therefore emphasizing places where strict mathematical structures are required to guarantee the robustness (Manikandan et al., 2025), safety, and generalizability of AI-driven robotic systems.
2. Safety Guarantees and Robustness
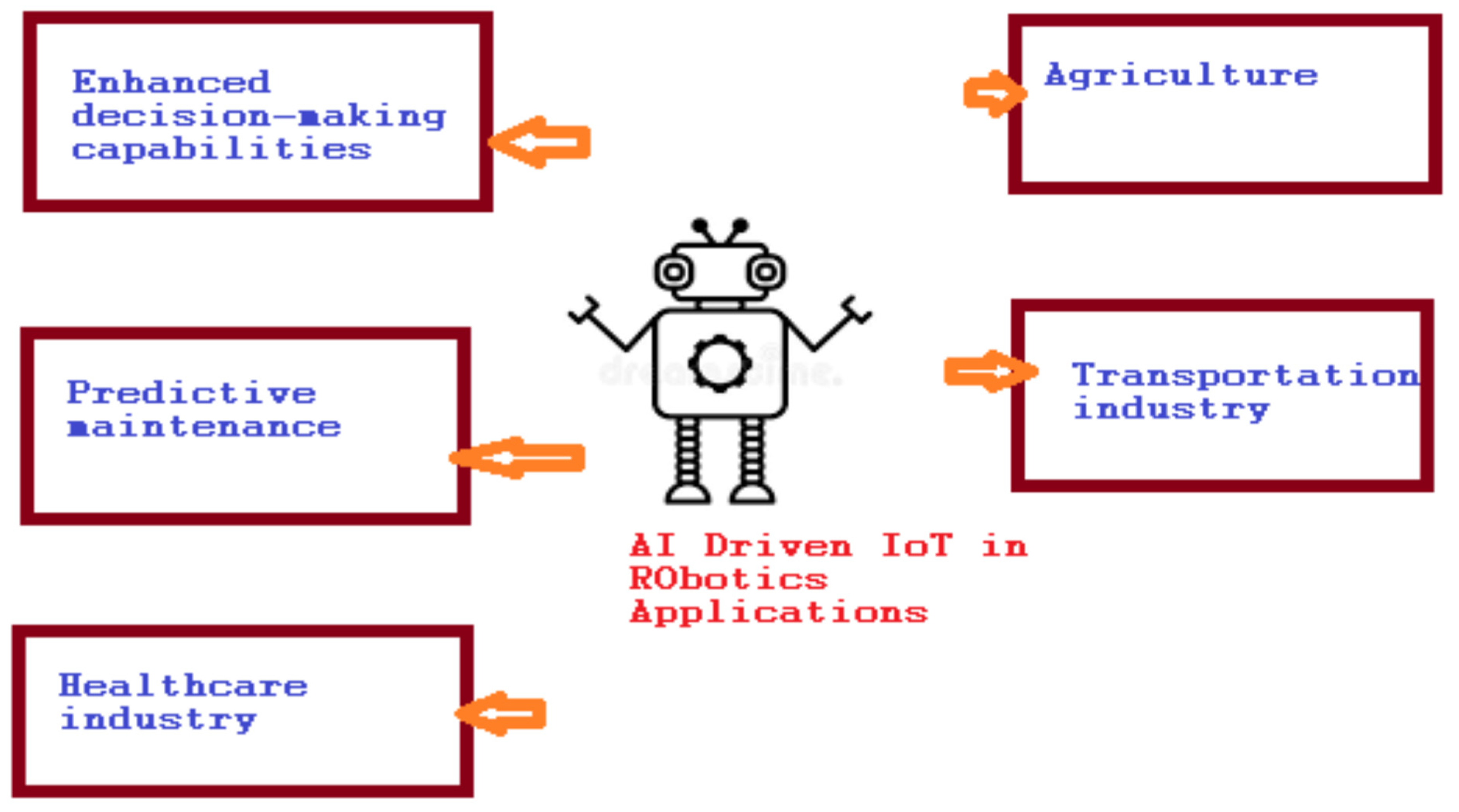
For AI-driven robots(Dhanwe et al., 2024)—particularly in safety-critical settings (e.g., autonomous driving, surgical robots)—the absence of official assurances about their reliability and safety is one of their most important issues, as depicted in Figure 2 (Dhanwe et al., 2024).
2.1. Official Verification of Neural Network Controllers
Deep neural networks (DNNs) (Chan et al., 2024), used for perception, policy learning, or state estimation, abound in many contemporary AI-driven robot control systems. Being very opaque “black boxes,” DNNs complicate greatly formal verification of their behavior (Chan et al., 2024).
- Problem: How can we mathematically prove that a neural network controller (Dai et al., 2021) will always operate within specified safety boundaries, avoid collisions, or maintain stability under all permissible inputs and environmental conditions?
- Challenges: Conventional formal verification techniques (Mahmoud et al., 2024) are impractical given the non-linear, high-dimensional character of DNNs and their sensitivity to hostile attacks. New mathematical methods are required to examine reachable sets of DNN-controlled systems(Mahmoud et al., 2024), check Lipschitz continuum features, and formulate probabilistic safety promises. This entails creating strong techniques for measuring uncertainty flow across neural networks and incorporating them into control Lyapunov functions (CLFs) or control barrier functions (CBFs) (Mahmoud et al., 2024; Li et al., 2023).
2.2. Uncertainty Propagation and Quantification
Sensor noise (Wang et al., 2022; Reiser et al., 2025), model errors, unexpected disturbances, and limited knowledge all contribute to the inherent uncertainty of real-world situations. Reliable operation is required for AI-driven robots despite this variability(Wang et al., 2022; Reiser et al., 2025).
- Problem: How can we accurately quantify and propagate uncertainties through complex AI models and control loops (Schöning & Pfisterer, 2023), ensuring that decision-making accounts for these uncertainties in a principled manner?
- Bayesian approaches present an intriguing path, but computationally difficult is their scaling to high-dimensional robot states (Zakka et al., 2023) and deep learning models. Still an open area is developing tractable solutions for probabilistic inference(Pfanschilling, et al., 2025), resilient state estimation (e.g., robust Kalman filters, particle filters for non-Gaussian uncertainties), and decision-making under extreme uncertainty (e.g., using robust optimization or minimax control). This covers mathematically (Pfanschilling, et al., 2025), defining how downstream control activities are affected by perception inaccuracies.
2.3. Oppositional Robustness
Particularly deep learning models(Menghani, 2023), artificial intelligence systems are susceptible to adversarial attacks, in which case tiny, barely noticeable changes to inputs might produce very erroneous results. For robots, this might show up as misreading instructions, misidentifying things, or sensing phantom barriers(Barron et al., 2024).
- Problem: How can we build AI-driven robot control systems that are certainly robust against adversarial perturbations in their sensor inputs or internal states(Gunawardena et al., 2024)?
- Challenges: Modern adversarial training approaches might produce few assurances and could lower performance on clean data (Li et al., 2021). Understanding the geometry of adversarial instances in high-dimensional state spaces (Geelen, et al., 2023), creating certified robustness solutions for robotic applications, and designing control laws that are automatically resistant to such assaults require novel mathematical frameworks. This investigates relations between control theory (Bin& Parisini, 2023., 2023), game theory, and adversarial machine learning.
3. Adaptation and Learning
Although artificial intelligence’s strength is in its learning, current learning paradigms for robot control confront major mathematical challenges regarding efficiency, generalization, and continuous adaptation.
3.1. Reinforcement Learning Sample Efficiency
Although reinforcement learning (RL) (Beck et al., 2025; Jensen, 2023), has had outstanding performance in simulated environments, its use on actual robots is sometimes hindered by great sample inefficiency. Training (Beck et al., 2025; Jensen, 2023), a robot in the actual world is expensive, labor-intensive, and possibly dangerous.
- Problem: How can we create mathematically grounded RL systems that learn optimal or near-optimal control policies with much less real-world contacts(Luo et al., 2024)?
Challenges: This covers research into model-based RL (learning dynamics models), off-policy learning, transfer learning from simulation to reality (sim-to-real), and efficient exploration strategies(Da et al., 2025). This mathematically means improving knowledge of the circumstances for successful policy transfer, developing tighter bounds on sample complexity (de Croon et al., 2022), and creating best experimental design plans for robot learning. Active research fields include Bayesian optimization, meta-learning, and information-theoretic approaches to exploration.
3.2. Lifelong and Continuous Learning
Robots used in the real world need to constantly change to new circumstances, dynamic surroundings, and fresh jobs without forgetting earlier acquired abilities (catastrophic forgetting)(Aleixo et al., 2023).
- Problem: How can we mathematically model and solve the issue of lifelong learning for robot control(Zhu et al., 2024), therefore allowing continuous adaptation and skill acquisition without performance drop on past tasks?
Challenges: This calls for fresh mathematical models for knowledge representation, memory management(Song & Li, 2025), and transfer learning with incremental policy and model updating. Relevant are methods from biologically inspired neural architectures, concept drift adaptation (Xiang et al., 2023), and online learning. It is essential to create metrics and theoretical guarantees for measuring and guaranteeing good transfer and to minimize catastrophic forgetting in robotic applications(Mukherjee et al., 2024).
3.3. Generalization and Out-of-Distribution Robustness
One of the main drawbacks of modern artificial intelligence systems is their weak generalization to data or circumstances much different from their training distribution (out-of--distribution, OOD) (Chen et al., 2024). For robots (Malik, 2024), this means that a policy developed in one context might perform horrifically in another rather similar environment.
- Problem: How can we mathematically characterize and enhance the generalization abilities of AI-driven robot controllers to fresh(Isreal et al., 2025) unfamiliar settings and duties?
- Challenges: This calls for a deeper knowledge of the inductive biases of learning algorithms (Yan et al., 2024), the intrinsic dimensionality of robotic tasks, and the creation of domain adaption methods with robust theoretical guarantees. Mathematical bases for developing more generalizable robot behaviors can be found in causal inference, invariant learning, and robust optimization(Wang et al., 2024).
4. Human–Robot Interaction (HRI)
Complex mathematical models are required to comprehend human intent (Winkle et al., 2023), guarantee safe cooperation, and build trust so that robots may be smoothly and safely integrated into human surroundings.
4.1. Intent Prediction and Inference
Robots must correctly infer and project human intentions (Kaza et al., 2024), goals, and future actions for efficient teamwork.
- Problem: How can we enable proactive and cooperative robot behavior by means of strong mathematical models for real-time human intent inference(Pandya et al., 2024), particularly in uncertain or partially visible situations?
- Challenges: Major mathematical problems are quantifying the uncertainty in intent predictions and creating control policies resistant to misinterpretations(Violos et al., 2025). This also covers knowledge of cognitive states and human tastes(Pilditch, 2024).
4.2. Shared Autonomy and Variable Autonomy
Many HRI situations include shared control between the person and the robot(Jonnavittula et al., 2024) or the degree of robot autonomy changes depending on context.
- Problem: How can we mathematically devise optimal control strategies for shared autonomy systems guaranteeing safety (Proia, 2024), efficiency, and user satisfaction that flawlessly mix human input with robot autonomy?
Challenges in this include human factors, optimal control, and dynamic system modeling. Mathematical models are required for human trust, cognitive load, and error propagation in shared control loops(Guo et al., 2024). This also entails creating arbitration systems and hand-over procedures with official assurances (Robinson et al., 2023).
4.3. Robot Decisions Can Have Ethical Ramifications as They Become More Autonomous
Of first importance is guaranteeing honesty(Soori et al., 2023), responsibility, and fairness in robot behavior.
- Problem: Directly into the mathematical formulation of robot control objectives and learning algorithms (Zhuang et al., 2022), how can we embed ethical principles and fairness limitations?
Challenges: This is a developing but essential field. It entails transforming abstract ethical ideas into measurable mathematical limits (e.g., ensuring non-discrimination, minimizing harm, maximising society benefit)(Lakdawalla et al., 2024). This may include constrained optimization, multi-objective optimization, and the integration of social welfare functions into control design (Rahimi et al., 2023).
5. Regulation of Complex Robotic Systems
Managing big, varied, or very dynamic robotic systems presents special mathematical difficulties.
5.1. Decentralized Control and Multi-Robot Coordination
Often in a dispersed way without a centralized coordinator (Dawood et al., 2025), many real-world projects involve teams of robots working together to meet shared objectives.
- Problem: How can we create scalable and strong mathematical frameworks for decentralized control and coordination of big multi-robot systems (Pradhan et al., 2023), therefore guaranteeing emergent desirable behaviours and preventing undesirable ones?
Challenges in this include swarm intelligence, graph theory, game theory, and distributed optimization(Cao et al., 2024). A major mathematical difficulty is guaranteeing stability, convergence, and fault tolerance in decentralized learning and control techniques(Wan et al., 2022). This also covers constrained control, task delegation, and resource distribution among communications (Pal et al., 2022).
5.2. Hybrid Systems and Event- Triggered Control
Many robotic systems have hybrid dynamics (Song & Wang, 2025)—that is, a mix of continuous physical movement and discrete logical transitions (e.g., switching between modes, contact events).
- Problem: Especially when AI components control the discrete transitions(Jain et al., 2025), how can we create mathematically precise techniques for designing and validating controllers for hybrid robotic systems?
- Challenges: This calls for formal methods, discrete event systems (Abbas et al., 2024)), and continuous control theory. Key mathematical issues are guaranteeing Zeno behavior avoidance(Qian et al., 2024), stability across mode changes, and robustness to uncertainties in event detection. Event-triggered control(Scheres et al., 2024)—where control updates occur only when needed—provides efficiency but complicates stability analysis.
5.3. Soft Robots and Deformable Bodies
Soft robots’ innate compliance and infinite-dimensional state spaces call into question conventional rigid-body control approaches.
- Problem: Particularly when AI is used to learn their intricate, non-linear dynamics(Qu et al. 2024), how can we create mathematical models and control techniques for very deformable soft robots?
Challenges: This combines continuum mechanics, functional analysis, and innovative techniques for state estimation and control of high-dimensional( Della Santina et al., 2023), non- linear systems. Significant mathematical difficulties arise in learning correct forward and inverse models for soft robots and developing controllers able to use their compliance for safe interaction.
6. State Estimating and Perception
Robot control is built on accurate state estimation(Nagami & Schwager, 2024) and perception; artificial intelligence has transformed these fields, but open mathematical challenges still exist.
6.1. Strong Semantic Perception and Sensor Fusion
To create a complete picture of their surroundings (Tan et al., 2024), robots use several sensors (cameras, LiDAR, IMUs). High-level semantic information can be extracted by AI-driven perception systems.
- Problem: How can we mathematically fuse heterogeneous sensor data, including semantic information(Sun & Ren, 2024), in a robust and computationally efficient manner to provide accurate and reliable state estimates for control?
- Problems: This entails robust estimation approaches, deep learning for feature extraction, and probabilistic graphical models. An open field is quantifying the uncertainty in semantic labels and integrating it into state estimation frameworks (e.g., semantic SLAM) (Shu et al., 2023) Equally important is strong handling of sensor malfunctions, occlusions, and new objects.
6.2. State Estimation with Limited Observability
Many robotic jobs require dealing with limited knowledge(Wu et al., 2023) regarding the surroundings or the robot’s own condition.
- Question: How can we create mathematically correct techniques for optimal state estimation and control under high partial observability(Wangwongchai et al., 2023), especially when AI models are applied to predict missing data?
- Challenges: This entails partially observable Markov decision processes (POMDPs),( Kurniawati, 2022) but realistically robot applications would find scaling them impractical. There are needed approximate inference techniques, active perception strategies, and information-theoretical approaches to sensing(Taniguchi et al., 2023).
7. Clarification and Interpretability
Many AI models applied in robot control have a “black-box”( Bélisle-Pipon et al., 2023) quality that hinders trust and debugging.
7.1. Control Through Interpretable and Explainable Artificial Intelligence
For debugging, certification, and human supervision(Zeraati et al., 2024), knowing why an AI-driven robot makes a specific choice is essential.
- Problem: How can we create mathematical models to ensure that human operators can understand and explain the decision-making processes of AI-driven robot controllers(Cifci, 2025)?
- Challenges: This goes beyond just picturing neural network activations. It entails creating techniques to draw human-understandable rules or explanations from intricate policies(Dubey et al., 2022), attribute control actions to certain inputs, and measure the “reasonableness” of a robot’s behavior. This may entail symbolic AI integration, counterfactual explanations, or saliency maps(Li et al., 2023).
8. Real-Time Limitations and Computational Efficiency
Most robotic applications demand real-time operation;(Kuznetsov et al., 2023) yet, whereas some sophisticated AI techniques are computationally demanding,
8.1. Resource-Constrained AI for Edge Robotics
A major difficulty is deploying sophisticated artificial intelligence models on limited robot hardware (Gupta, 2025) (e.g., limited CPU, GPU, memory, power).
- Problem: While maintaining performance and safety guarantees, how can we create mathematically optimal techniques for compressing, quantizing, and optimizing AI models for effective run on edge robotic systems(Wang et al., 2025)?
Challenges include hardware-aware co-design, efficient architectures (e.g., MobileNets)( Alhussain, 2024), quantization, and neural network pruning. Important is establishing theoretical limits on the performance loss caused by model compression and guaranteeing real-time performance.
8.2. Real-Time Control and Optimization
Many control challenges entail real-time(Flamm et al., 2021), under tight deadlines resolution of sophisticated optimization issues.
Problem: Often with AI-driven parts, how can we create mathematically efficient algorithms for real-time optimal control and motion planning capable of handling high-dimensional state spaces and non-linear dynamics(Zhao et al., 2024)?
- Challenges: This calls for progress in approximate dynamic programming, model predictive control (MPC), and numerical optimization(Chacko et al., 2023). Active areas include utilizing artificial intelligence for warm-starting optimization issues(Sharony et al., 2024), developing effective solvers, or directly learning control policies satisfying real-time limitations.
9. Final Thoughts
An interesting frontier with great possibility to transform many sectors and facets of daily life is the incorporation of artificial intelligence into robotic control systems. Unlocking this capability entirely, however, calls for solving a host of fundamental mathematical unsolved issues. From guaranteeing the demonstrable safety and dependability of neural network controllers to allowing robots to learn effectively, generalize well, and interact naturally with people, every obstacle calls for innovative mathematical understanding and serious theoretical frameworks.
Interdisciplinary study at the interface of control theory, machine learning, optimization, formal methods, and applied mathematics should reveal answers to these issues. Improvement in these fields not only enhances the capacities of individual robots but also clears the path for the development of intelligent, dependable, and trustworthy autonomous systems capable of safely and efficiently navigating complicated, erratic, and human-centric surroundings. Fundamentally a mathematical one, the road to completely autonomous and intelligent robots call for continuous work and invention to close the current theoretical gaps.
References
- Abbas, N., Abbas, Z., Zafar, S., Ahmad, N., Liu, X., Khan, S.S., Foster, E.D. and Larkin, S., 2024. Survey of advanced nonlinear control strategies for UAVs: Integration of sensors and hybrid techniques. Sensors, 24(11), p.3286.
- Aleixo, E.L., Colonna, J.G., Cristo, M. and Fernandes, E., 2023. Catastrophic forgetting in deep learning: a comprehensive taxonomy. arXiv preprint arXiv:2312.10549.
- Alhussain, A. 2024. Efficient Processing of Convolutional Neural Networks on the Edge: A Hybrid Approach Using Hardware Acceleration and Dual-Teacher Compression.
- Aljamal, M., Patel, S. and Mahmood, A., 2025. Comprehensive Review of Robotics Operating System-Based Reinforcement Learning in Robotics. Applied Sciences, 15(4), p.1840.
- Barron, S.L., Oldroyd, S.V., Saez, J., Chernaik, A., Guo, W., McCaughan, F., Bulmer, D. and Owens, R.M., 2024. A conformable organic electronic device for monitoring epithelial integrity at the air liquid interface. Advanced Materials, 36(8), p.2306679.
- Beck, J., Vuorio, R., Liu, E.Z., Xiong, Z., Zintgraf, L., Finn, C. and Whiteson, S., 2025. A tutorial on meta-reinforcement learning. Foundations and Trends® in Machine Learning, 18(2-3), pp.224-384.
- Bélisle-Pipon, J.C., Monteferrante, E., Roy, M.C. and Couture, V., 2023. Artificial intelligence ethics has a black box problem. AI & SOCIETY, pp.1-16.
- Bin, M. and Parisini, T., 2023. A small-gain theory for abstract systems on topological spaces. IEEE Transactions on Automatic Control, 68(8), pp.4494-4507.
- Cantucci, F., Marini, M. and Falcone, R., 2025. Trustworthiness Assessment of an Adaptive and Explainable Robot in a Real Environment. International Journal of Social Robotics, pp.1-12.
- Cao, P., Lei, L., Cai, S., Shen, G., Liu, X., Wang, X., Zhang, L., Zhou, L. and Guizani, M., 2024. Computational intelligence algorithms for UAV swarm networking and collaboration: A comprehensive survey and future directions. IEEE Communications Surveys & Tutorials.
- Chacko, K., Augustine, M.T., Janardhanan, S., Patil, D.U. and Kar, I.N., 2023. Approximate Dynamic Programming based Model Predictive Control of Nonlinear systems. arXiv preprint arXiv:2312.05952.
- Chan, K.Y., Abu-Salih, B., Qaddoura, R., Al-Zoubi, A.M., Palade, V., Pham, D.S., Del Ser, J. and Muhammad, K., 2023. Deep neural networks in the cloud: Review, applications, challenges and research directions. Neurocomputing, 545, p.126327.
- Cifci, A., 2025. Interpretable prediction of a decentralized smart grid based on machine learning and explainable artificial intelligence. IEEE Access.
- Da, L., Turnau, J., Kutralingam, T.P., Velasquez, A., Shakarian, P. and Wei, H., 2025. A survey of sim-to-real methods in rl: Progress, prospects and challenges with foundation models. arXiv preprint arXiv:2502.13187.
- Dai, H., Landry, B., Yang, L., Pavone, M. and Tedrake, R., 2021. Lyapunov-stable neural-network control. arXiv preprint arXiv:2109.14152.
- Dawood, M., Pan, S., Dengler, N., Zhou, S., Schoellig, A.P. and Bennewitz, M., 2025. Safe Multi-Agent Reinforcement Learning for Behavior-Based Cooperative Navigation. IEEE Robotics and Automation Letters.
- de Croon, G.C., Dupeyroux, J.J.G., Fuller, S.B. and Marshall, J.A., 2022. Insect-inspired AI for autonomous robots. Science robotics, 7(67), p.eabl6334.
- Della Santina, C., Duriez, C. and Rus, D., 2023. Model-based control of soft robots: A survey of the state of the art and open challenges. IEEE Control Systems Magazine, 43(3), pp.30-65.
- Dhanwe, S.S., Abhangrao, C.M. and Liyakat, K.K.S., 2024. AI-driven IoT in Robotics: A Review. Journal of Mechanical Robotics, 9(1), pp.41-48.
- Dubey, S.R., Singh, S.K. and Chaudhuri, B.B., 2022. Activation functions in deep learning: A comprehensive survey and benchmark. Neurocomputing, 503, pp.92-108.
- Flamm, B., Peter, C., Büchi, F.N. and Lygeros, J., 2021. Electrolyzer modeling and real-time control for optimized production of hydrogen gas. Applied Energy, 281, p.116031.
- Geelen, R., Balzano, L. and Willcox, K., 2023, December. Learning latent representations in high-dimensional state spaces using polynomial manifold constructions. In 2023 62nd IEEE Conference on Decision and Control (CDC) (pp. 4960-4965). IEEE.
- Gupta, S., 2025. AI AGENTS COLLABORATION UNDER RESOURCE CONSTRAINTS: PRACTICAL IMPLEMENTATIONS. INTERNATIONAL JOURNAL OF ARTIFICIAL INTELLIGENCE RESEARCH AND DEVELOPMENT, 3(1), pp.51-63.
- Jain, R., Parmar, K.J., Palaniappan, D. and Premavathi, T., 2025. Hybrid Control Systems: Integrating AI With Traditional Methods. In Harnessing AI for Control Engineering (pp. 37-62). IGI Global Scientific Publishing.
- Jensen, K.T., 2023. An introduction to reinforcement learning for neuroscience. arXiv preprint arXiv:2311.07315.
- Jonnavittula, A., Mehta, S.A. and Losey, D.P., 2024. SARI: Shared autonomy across repeated interaction. ACM Transactions on Human-Robot Interaction, 13(2), pp.1-36.
- Kim, S.W., Kong, J.H., Lee, S.W. and Lee, S., 2022. Recent advances of artificial intelligence in manufacturing industrial sectors: A review. International Journal of Precision Engineering and Manufacturing, pp.1-19.
- Kurniawati, H., 2022. Partially observable Markov decision processes and robotics. Annual Review of Control, Robotics, and Autonomous Systems, 5(1), pp.253-277.
- Kuznetsov, S.D., Velikhov, P.E. and Fu, Q., 2023. Real-time analytics: benefits, limitations, and trade-offs. Programming and Computer Software, 49(1), pp.1-25.
- Li, B., Wen, S., Yan, Z., Wen, G. and Huang, T., 2023. A survey on the control lyapunov function and control barrier function for nonlinear-affine control systems. IEEE/CAA Journal of Automatica Sinica, 10(3), pp.584-602.
- Li, P., Bahri, O., Hosseinzadeh, P., Boubrahimi, S.F. and Hamdi, S.M., 2024. Info-CELS: Informative Saliency Map Guided Counterfactual Explanation. arXiv preprint arXiv:2410.20539.
- Li, P., Rao, X., Blase, J., Zhang, Y., Chu, X. and Zhang, C., 2021, April. Cleanml: A study for evaluating the impact of data cleaning on ml classification tasks. In 2021 IEEE 37th International Conference on Data Engineering (ICDE) (pp. 13-24). IEEE.
- Luo, J., Xu, C., Wu, J. and Levine, S., 2024. Precise and Dexterous Robotic Manipulation via Human-in-the-Loop Reinforcement Learning. arXiv preprint arXiv:2410.21845.
- Mahmoud, A.T., Mohammed, A.A., Ayman, M., Medhat, W., Selim, S., Zayed, H., Yousef, A.H. and Elaraby, N., 2024. Formal Verification of Code Conversion: A Comprehensive Survey. Technologies, 12(12), p.244.
- Malik, I.H., 2024. Can political ecology be decolonised? A dialogue with Paul Robbins. Geo: Geography and Environment, 11(1), p.e00140.
- Manikandan, S., Kaviya, R.S., Shreeharan, D.H., Subbaiya, R., Vickram, S., Karmegam, N., Kim, W. and Govarthanan, M., 2025. Artificial intelligence-driven sustainability: Enhancing carbon capture for sustainable development goals–A review. Sustainable Development, 33(2), pp.2004-2029.
- Menghani, G., 2023. Efficient deep learning: A survey on making deep learning models smaller, faster, and better. ACM Computing Surveys, 55(12), pp.1-37.
- Mukherjee, A., Divya, A.B., Sivvani, M. and Pal, S.K., 2024. Cognitive intelligence in industrial robots and manufacturing. Computers & Industrial Engineering, 191, p.110106.
- Nagami, K. and Schwager, M., 2024. State Estimation and Belief Space Planning under Epistemic Uncertainty for Learning-Based Perception Systems. IEEE Robotics and Automation Letters.
- Pal, S., Dorri, A. and Jurdak, R., 2022. Blockchain for IoT access control: Recent trends and future research directions. Journal of Network and Computer Applications, 203, p.103371.
- Pfanschilling, V., Shindo, H., Dhami, D.S. and Kersting, K., 2025. NeST: The Neuro-Symbolic Transpiler. International Journal of Approximate Reasoning, p.109369.
- Pilditch, T.D., 2024. The reasoning under uncertainty trap: A structural ai risk. arXiv preprint arXiv:2402.01743.
- Proia, S., 2024. Control techniques for collaborative and cooperative robotic systems.
- Rahimi, I., Gandomi, A.H., Chen, F. and Mezura-Montes, E., 2023. A review on constraint handling techniques for population-based algorithms: from single-objective to multi-objective optimization. Archives of Computational Methods in Engineering, 30(3), pp.2181-2209.
- Reiser, P., Aguilar, J.E., Guthke, A. and Bürkner, P.C., 2025. Uncertainty quantification and propagation in surrogate-based Bayesian inference. Statistics and Computing, 35(3), p.66.
- Robinson, N., Tidd, B., Campbell, D., Kulić, D. and Corke, P., 2023. Robotic vision for human-robot interaction and collaboration: A survey and systematic review. ACM Transactions on Human-Robot Interaction, 12(1), pp.1-66.
- Scheres, K.J., Postoyan, R. and Heemels, W.M., 2024. Robustifying event-triggered control to measurement noise. Automatica, 159, p.111305.
- Schöning, J. and Pfisterer, H.J., 2023. Safe and trustful AI for closed-loop control systems. Electronics, 12(16), p.3489.
- Sharony, E., Yang, H., Che, T., Pavone, M., Mannor, S. and Karkus, P., 2024. Learning multiple initial solutions to optimization problems. arXiv preprint arXiv:2411.02158.
- Shu, F., Wang, J., Pagani, A. and Stricker, D., 2023, May. Structure plp-slam: Efficient sparse mapping and localization using point, line and plane for monocular, rgb-d and stereo cameras. In 2023 IEEE International Conference on Robotics and Automation (ICRA) (pp. 2105-2112). IEEE.
- Song, H. and Wang, Z., 2025. Dynamic Event-triggered Model Predictive Control for Nonlinear Discrete Cyber-Physical Systems with Hybrid Attacks. IEEE Transactions on Automation Science and Engineering.
- Song, Y.J.X. and Li, J., 2025. MDATA Knowledge Representation. MDATA Cognitive Model: Theory and Applications, 15470, p.24.
- Soori, M., Arezoo, B. and Dastres, R., 2023. Artificial intelligence, machine learning and deep learning in advanced robotics, a review. Cognitive Robotics, 3, pp.54-70.
- Sun, R. and Ren, Y., 2024. A multi-source heterogeneous data fusion method for intelligent systems in the Internet of Things. Intelligent Systems with Applications, 23, p.200424.
- Tan, M., Zhuang, Z., Chen, S., Li, R., Jia, K., Wang, Q. and Li, Y., 2024. EPMF: Efficient perception-aware multi-sensor fusion for 3D semantic segmentation. IEEE Transactions on Pattern Analysis and Machine Intelligence.
- Taniguchi, A., Tabuchi, Y., Ishikawa, T., El Hafi, L., Hagiwara, Y. and Taniguchi, T., 2023. Active exploration based on information gain by particle filter for efficient spatial concept formation. Advanced Robotics, 37(13), pp.840-870.
- Wan, K., Chen, Y., Zhao, J. and Yu, M., 2022. A decentralized fault-tolerant control for DC microgrids against disturbances and actuator faults. IEEE Transactions on Smart Grid, 14(4), pp.2534-2544.
- Wang, C., Qiang, X., Xu, M. and Wu, T., 2022. Recent advances in surrogate modeling methods for uncertainty quantification and propagation. Symmetry, 14(6), p.1219.
- Wang, X. and Jia, W., 2025. Optimizing Edge AI: A Comprehensive Survey on Data, Model, and System Strategies. arXiv preprint arXiv:2501.03265.
- Wangwongchai, A., Waqas, M., Dechpichai, P., Hlaing, P.T., Ahmad, S. and Humphries, U.W., 2023. Imputation of missing daily rainfall data; A comparison between artificial intelligence and statistical techniques. MethodsX, 11, p.102459.
- Winkle, K., McMillan, D., Arnelid, M., Harrison, K., Balaam, M., Johnson, E. and Leite, I., 2023, March. Feminist human-robot interaction: Disentangling power, principles and practice for better, more ethical HRI. In Proceedings of the 2023 ACM/IEEE international conference on human-robot interaction (pp. 72-82).
- Xiang, Q., Zi, L., Cong, X. and Wang, Y., 2023. Concept drift adaptation methods under the deep learning framework: A literature review. Applied Sciences, 13(11), p.6515.
- Yan, S., Zhang, B., Zhang, Y., Boedecker, J. and Burgard, W., 2024, May. Learning continuous control with geometric regularity from robot intrinsic symmetry. In 2024 IEEE International Conference on Robotics and Automation (ICRA) (pp. 49-55). IEEE.
- Zakka, K., Smith, L., Gileadi, N., Howell, T., Peng, X.B., Singh, S., Tassa, Y., Florence, P., Zeng, A. and Abbeel, P., 2023. Robopianist: A benchmark for high-dimensional robot control. arXiv preprint arXiv:2304.04150.
- Zeraati, M., Sheibani, M.R., Jabari, F. and Heydarian-Forushani, E., 2024. A novel state estimation method for distribution networks with low observability based on linear AC optimal power flow model. Electric Power Systems Research, 228, p.110085.
- Zhao, Z., Cheng, S., Ding, Y., Zhou, Z., Zhang, S., Xu, D. and Zhao, Y., 2024. A survey of optimization-based task and motion planning: From classical to learning approaches. IEEE/ASME Transactions on Mechatronics.
- Zhu, D., Bu, Q., Zhu, Z., Zhang, Y. and Wang, Z., 2024. Advancing autonomy through lifelong learning: a survey of autonomous intelligent systems. Frontiers in neurorobotics, 18, p.1385778.
Figure 1.
An ongoing casting procedure.
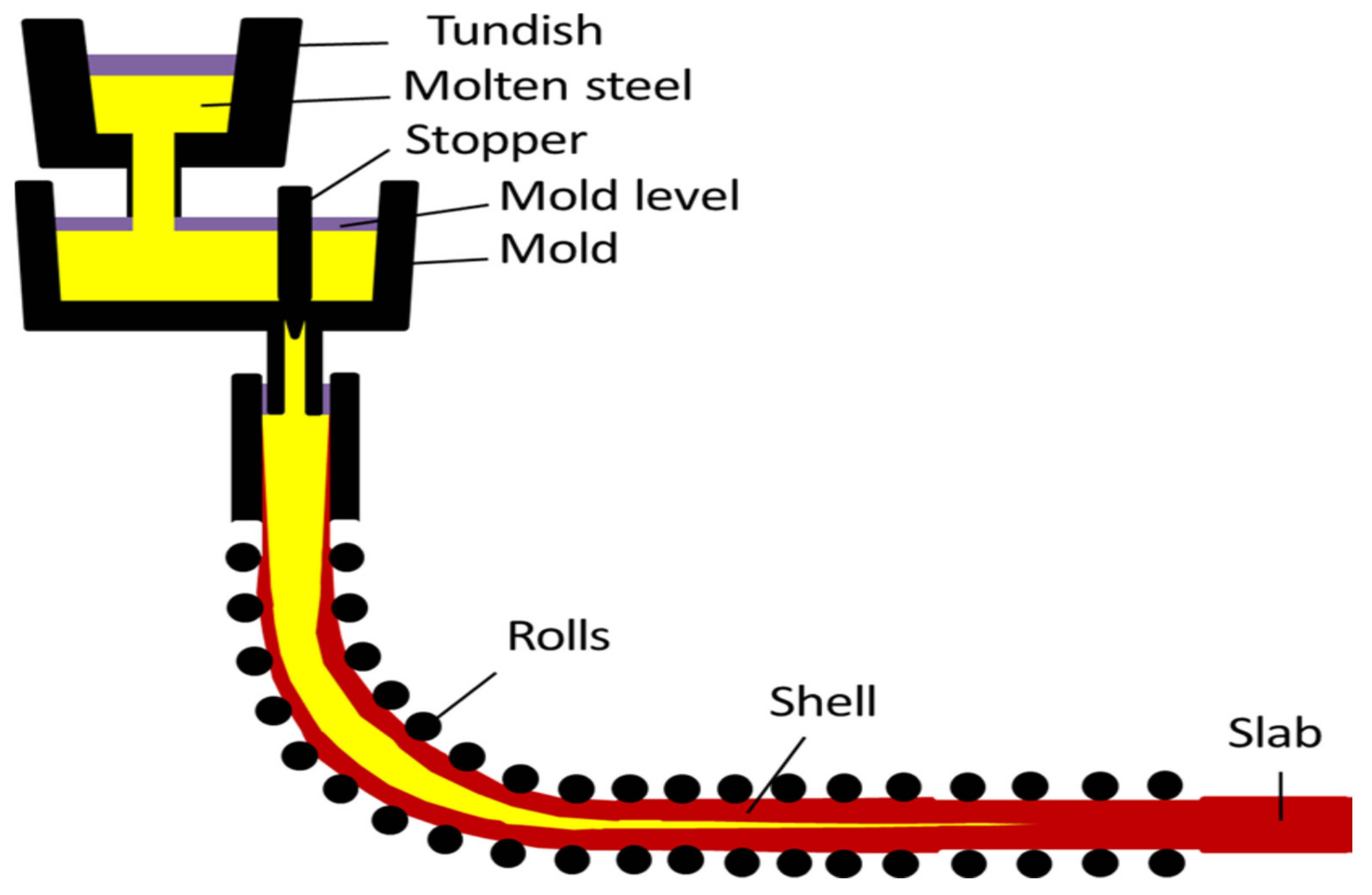
Figure 2.
AI-driven Internet of Things (AIIoT) in robotics applications.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



