
Submitted:
08 May 2025
Posted:
08 May 2025
You are already at the latest version
Abstract
This study proposes an L1 discretization scheme to solve time-fractional diffusion equations involving Caputo-type Erd\'{e}lyi-Kober operator, which are fundamental in modeling anomalous diffusion phenomena. To facilitate analysis, we first reformulate the original problem as an equivalent fractional integral equation. Within this transformed setting, the temporal Caputo-type Erd\'{e}lyi-Kober operator is discretized via the L1 formula, with rigorous demonstration of its second-order temporal accuracy and detailed analysis of the coefficient properties in the discrete system. The spatial derivative is approximated using the classical second-order centered difference, culminating in a fully discrete scheme that achieves second-order accuracy in both temporal and spatial dimensions. To address computational challenges arising from the nonlocal nature of fractional operators, we further develop a fast implementation algorithm based on sum-of-exponential approximation for the fractional kernel function, significantly reducing memory requirements and computational costs. The numerical experiment validates the theoretical convergence rates and substantiates the computational superiority of the proposed fast algorithm.
Keywords:
Caputo-type Erdelyi-Kober operator
; time fractional diffusion equation
; L1 formula
; error estimate
; sum-of-exponential approximation
1. Introduction
In recent decades, fractional integro-differential equations have emerged as critical mathematical tools in interdisciplinary scientific and engineering research [2,6,7,11]. Within this framework, fractional diffusion equations occupy a central position due to their capability to model anomalous transport phenomena. These equations exhibit remarkable versatility in capturing multi-regime diffusion dynamics and characteristic crossover behaviors observed in complex heterogeneous systems [10,12,14]. To address such diverse physical scenarios, multiple fractional operator definitions have been developed, including the Riemann-Liouville calculus, Grünwald-Letnikov integral, Caputo derivative, Hadamard calculus, Erdélyi-Kober calculus and so on. While numerical methods for equations involving the first four operator types have reached considerable maturity, the analysis of Erdélyi-Kober fractional operators remains an open research frontier. This gap in existing literature serves as the primary motivation for our work on developing systematic numerical approaches for this understudied operator class.
The Erdélyi-Kober fractional integral operator, originally introduced by Erdélyi and Hermann K. in 1940 [3] through integral boundary condition formulations, has gained significant traction in modeling multiscale physical systems [13,16,20]. Fundamental properties of these operators, particularly the relationship between Caputo-type Erdélyi-Kober derivatives and their classical counterparts, are systematically detailed in [6,9,21]. Recent advances in Erdélyi-Kober fractional integro-differential equations have yielded several key developments. [22,23] used the fixed point theorem to analyze the existence and uniqueness of solutions for Erdélyi-Kober fractional nonlinear integral equations. Płociniczak [17] established a dimension-reduction framework for fractional porous media equations via non-dimensionalization, transforming the original equation into tractable integro-differential forms, thus greatly reducing the complexity of the solution. Moreover, the Erdélyi-Kober operator’s equivalence to hyper-Bessel differential operators has enabled novel solution strategies for hyper-Bessel fractional equations [1,24,25].
The inherent non-locality of fractional operators renders analytical solutions computationally prohibitive, necessitating advanced numerical approximations for practical applications. While significant progress has been made in temporal fractional diffusion equations through finite difference [26], finite element [5], and spectral methods [8], numerical treatments for Erdélyi-Kober fractional integro-differential equations remain underdeveloped. Current limitations in this domain include: Płociniczak et al. [19] proposed rectangular, midpoint, and trapezoidal formulations for Erdélyi-Kober fractional integral operator, but provided no error bounds or theoretical justification. Odibat et al. [15] implemented predictor-correction method for Caputo-type Erdélyi-Kober fractional differential equations without convergence analysis. Existing semi-discrete schemes [18] achieve suboptimal first-order accuracy under initial weak regularity assumptions, and analyzed the stability and convergence of the scheme by using the Galerkin-Hermite method. Motivated by these gaps, this work develops novel high-order finite difference schemes for Caputo-type Erdélyi-Kober fractional diffusion equations, specifically targeting second-order temporal accuracy while maintaining rigorous stability guarantees through innovative kernel coefficient analysis.
In what follows, we focus on the following initial-boundary value problem of Caputo-type Erdélyi-Kober time fractional diffusion model
in which are given suitably smooth functions, Caputo-type Erdélyi-Kober fractional derivative CEK is defined by [15]
where
 |
To facilitate subsequent analysis, we apply Erdélyi-Kober fractional integral to both sides of (1), yielding an equivalent form
where
The remainder of this paper is organized as follows. Section 2 develops an L1-type discretization formula for the Erdélyi-Kober fractional integral operator, accompanied by a detailed analysis of truncation errors. Furthermore, we rigorously establish the positive definiteness of the discrete kernel coefficients. Building upon these theoretical foundations, we derive a finite difference scheme to solve (5). To enhance computational efficiency, Section 3 introduces a fast implementation algorithm for the difference scheme. The numerical example presented in Section 4 validate the theoretical predictions and demonstrate the effectiveness of our method. Finally, concluding remarks with perspectives are provided in the last section.
2. A Direct L1 Difference Scheme
This section focuses on constructing an L1-type difference scheme for Equation (5) coupled with its governing initial-boundary value conditions (2)-(3). We firstly introduce some spatial notations. Given a positive constant denote Let Then the grid function space is defined by
For any introduce the following notations,
For any , the inner products and norms are defined by
2.1. The Derivation of the Difference Scheme
For any fixed take a positive integer And denote
Denote Considering Equation (5) at the point we have
Let be linear interpolation polynomial of any function p defined on an interval We get
with the truncation error
We now develop an L1-type discretization formula for the temporal convolution integral in (6). Let we ignore the space variable x for a while. Using (7) we have
here
For the truncation error of the L1 formula we have the estimation below.
Theorem 1.
Suppose Denote
Then, we have
Proof.
With the help of (8), we get
Thus, we complete the proof. □
The coefficients defined in (9) have the properties below.
Lemma 1.
For defined in (9), it holds that
Proof.
(1) Proof of (10). It is easy to know that
For we have
where To prove we just need to prove By Taylor’s formula, we have
in which
It is easy to know that
In addition, when can be proved by a simple calculation.
(2) Proof of (11).
(3) Proof of (12).
Similar to the treatment of one can also prove that
Therefore, the proof is complete. □
Now, we devote to presenting a second-order difference scheme for solving the problem (1)-(3). Suppose Denote
Considering Equation (5) at the point we get
Applying (9) to approximating the temporal fractional derivative and central difference quotient to the spatial derivative, we can obtain
where
Noticing Theorem 1, there exists a positive constant such that
Noticing the initial-boundary value conditions (2) and (3), we have
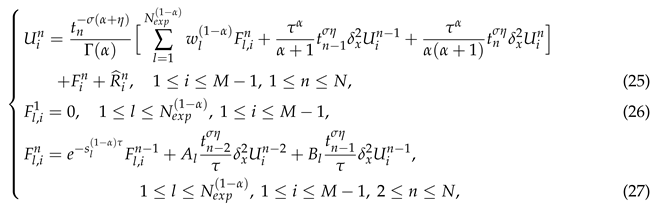
Omitting the small terms in (13) and replacing the grid function by its numerical approximation we construct a direct second-order difference scheme for solving the problem (1)-(3) as follows:
 |
 |
3. A Fast Difference Scheme
The inherent non-locality of fractional operators poses significant implementation challenges in practical computation. To address this fundamental limitation, we implement the fast algorithm developed by Jiang et al. [4] within our methodological framework.
3.1. Fast Approximation of the Erdélyi-Kober Integral
The following lemma is fundamental and needed.
Lemma 2.
[4] For the given and tolerance error cut-off time restriction and final time there are one positive integer positive points and corresponding positive weights such that
where
Now, we will derive a fast algorithm for computing the Erdélyi-Kober integral Let
where
The integral can be evaluated by using a recursive algorithm, i.e.
where for
Besides, one can show that
in which
By the definition of and it is easy to know that
Lemma 3.
The coefficient satisfies
Proof.
It is clear that all are positive. For the mean value theorem yields
which means that increase monotonically with respect to k and is convex.
Similarity, we have
Furthermore, we have
and
In addition, one has
□
Theorem 2.
Suppose the function we have
Proof.
Since
With the help of Theorem 1, we obtain
On the other hand, Lemma 2 yields
Thus, we complete the proof. □
3.2. The Fast Difference Scheme
Now, we present a fast difference scheme for the problem (1)-(3). Similar to the treatment of the direct difference scheme, applying (20) in temporal direction, we get
where there exists a constant such that
Omitting the small term in (Section 3.2), replacing the grid functions by their numerical approximations and noticing the initial-boundary value conditions (15)-(16), we arrive at following fast difference scheme
 |
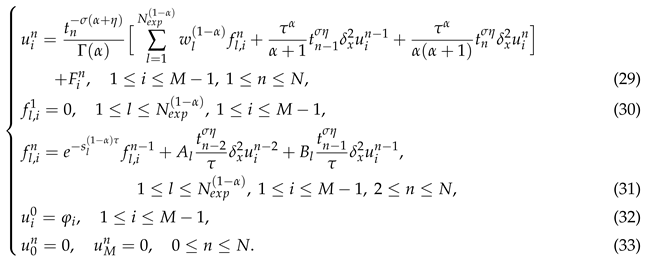 |
4. Numerical Analysis
This section provides numerical validation demonstrating the effectiveness of our novel discretization framework for Erdélyi-Kober integration operator. Through a detailed comparative analysis of CPU time between the direct difference scheme (17)-(19) and the fast difference scheme (29)-(33), our computational experiments reveal that the accelerated algorithm significantly enhances computational efficiency with complexity reduced from to . The absolute tolerance error is adopted in our numerical simulations.
Example 1.
We choose the exact solution of the problem (5) to be The right hand side function is determined by the exact solution as follows:
Let the finial time The spatial domain To examine the accuracy and efficiency of the difference schemes, the -norm error
is recorded in each run and the experimental orders are evaluated by
The accuracy tests are performed by taking the parameter for three fractional orders and The error analyses for both the direct and accelerated difference schemes establish an asymptotic convergence order of with the theoretical upper bounds demonstrating remarkable agreement with empirical convergence rates observed in our numerical simulations.
Table 1 shows the numerical accuracy and CPU time of two difference schemes in time. To isolate temporal errors, we employ a refined spatial discretization with The numerical verification results confirm second-order temporal accuracy, demonstrating remarkable agreement between empirical convergence rates and theoretical predictions.
Next, we turn to test the numerical accuracy and corresponding CPU time of two difference schemes in space. Fix a fine temporal step size such that the spatial errors dominate the temporal errors. Table 2 records the numerical results of two difference schemes when solving the example for different One can observe that convergence orders of two difference schemes are good agreement with theoretical results. Furthermore, the computational cost of the direct difference scheme is largely higher than that of the fast difference scheme, which also reflects from the side the high efficiency of the fast algorithm.
5. Concluding Remarks
This paper presented two temporal second-order difference schemes for solving time-fractional diffusion equations involving the Caputo-type Erdélyi-Kober operator, accompanied by rigorous error estimation. While a complete theoretical framework for the difference schemes remains to be developed, we nevertheless establish critical properties of the temporal L1-type formula’s coefficients. Domain knowledge suggests that these coefficient properties constitute fundamental prerequisites for rigorous stability and convergence analyses in such fractional calculus contexts. Consequently, the present work establishes a methodological foundation that may inform subsequent theoretical investigations. The numerical validation section conclusively demonstrates the theoretical convergence rates through systematic implementation.
Funding
RD was partially supported by the National Natural Science Foundation of China (No. 12201076) and the China Postdoctoral Science Foundation (No. 2023M732180).
Data Availability Statement
Data sharing not applicable to this paper as no datasets were generated or analysed during the current study.
Conflicts of Interest
The authors declare that they have no conflict of interest.
References
- Al-Musalhi, F., Al-Salti, N., Karimov, E. Initial boundary value problems for a fractional differential equation with hyper-Bessel operator. Fract. Calc. Appl. Anal., 21 (2018), pp. 200-219.
- de Pablo, A., Quirós, F., Rodríguez, A., Vázquez, J. L. A fractional porous medium equation. Adv. Math., 226 (2011), pp. 1378-1409.
- Erdélyi, A., Kober, H. Some remarks on Hankel transforms. Quart. J. Math. Oxford Ser., 11 (1940), pp. 212-221.
- Jiang, S. D., Zhang, J. W., Zhang, Q., Zhang, Z. M. Fast evaluation of the Caputo fractional derivative and its applications to fractional diffusion equations. Commun. Comput. Phys., 21 (2017), pp. 650-678.
- Jin, B. T., Li, B. Y., Zhou, Z. An analysis of the Crank-Nicolson method for subdiffusion. IMA J. Numer. Anal., 38 (2018), pp. 518-541.
- Kiryakova, V. S. Generalized fractional calculus and applications. CRC Press, 1993.
- Li, C. P., Cai, M. Theory and numerical approximations of fractional integrals and derivatives. Society for Industrial and Applied Mathematics (SIAM), Philadelphia, PA, (2020), pp. xiii+312.
- Lin, Y. M., Xu, C. J. Finite difference/spectral approximations for the time-fractional diffusion equation. J. Comput. Phys., 225 (2007), pp. 1533-1552.
- Luchko, Y., Trujillo, J. J. Caputo-type modification of the Erdélyi-Kober fractional derivative. Fract. Calc. Appl. Anal., 10 (2007), pp. 249-267.
- Mainardi, F. Fractional calculus and waves in linear viscoelasticity. Imperial College Press, London, (2010), pp. xx+347.
- Metzler, R., Klafter, J. The random walk’s guide to anomalous diffusion: a fractional dynamics approach. Phys. Rep., 339 (2000), pp. 77.
- Metzler, R., Klafter, J. Accelerating Brownian motion: A fractional dynamics approach to fast diffusion. Europhys. Lett., 51 (2000), pp. 492-498.
- Mura, A., Taqqu, M. S., Mainardi, F. Non-Markovian diffusion equations and processes: analysis and simulations. Phys. A, 387 (2008), pp. 5033-5064.
- Nigmatullin, R. R. To the theoretical explanation of the “Universal Response”. Physica B, 123 (1984), pp. 739-745.
- Odibat, Z., Baleanu, D. On a new modification of the Erdélyi-Kober fractional derivative. Fractal Fract., 5 (2021), pp. 121.
- Pagnini, G. Erdélyi-Kober fractional diffusion. Fract. Calc. Appl. Anal., 15 (2012), pp. 117-127.
- Płociniczak, ł. Approximation of the Erdélyi-Kober operator with application to the time-fractional porous medium equation. SIAM J. Appl. Math., 74 (2014), pp. 1219-1237.
- Płociniczak, łukasz, Świtała, Mateusz. Numerical scheme for Erdélyi-Kober fractional diffusion equation using Galerkin-Hermite method. Fract. Calc. Appl. Anal., 25 (2022), pp. 1651-1687.
- Płociniczak, ł., Sobieszek, S. Numerical schemes for integro-differential equations with Erdélyi-Kober fractional operator. Numer. Algorithms, 76 (2017), pp. 125-150.
- Sneddon, I. N. The use in mathematical analysis of Erdélyi -Kober operators and some of their applications. Fract. Calc. Appl., 457 (1975), pp. 37-79.
- Tang, J. H. Analysis and Calculation of Erdélyi-Kober Fractional Differential Equations(Doctoral thesis), Shanghai University, 2022.
- Thongsalee, N., Ntouyas, S. K., Tariboon, J. Nonlinear Riemann-Liouville fractional differential equations with nonlocal Erdélyi-Kober fractional integral conditions. Fract. Calc. Appl. Anal., 19 (2016), pp. 480-497.
- Wang, J. R., Dong, X. W., Zhou, Y. Analysis of nonlinear integral equations with Erdélyi-Kober fractional operator. Commun. Nonlinear Sci. Numer. Simul., 17 (2012), pp. 3129-3139.
- Zhang, K. Q. Applications of Erdélyi-Kober fractional integral for solving time-fractional Tricomi-Keldysh type equation. Fract. Calc. Appl. Anal., 23 (2020), pp. 1381-1400.
- Zhang, K. Q. Existence and uniqueness of analytical solution of time-fractional Black-Scholes type equation involving hyper-Bessel operator. Math. Methods Appl. Sci., 44 (2021), pp. 6164-6177.
- Zhang, Y. N., Sun, Z. Z., Wu, H. W. Error estimates of Crank-Nicolson-type difference schemes for the subdiffusion equation. SIAM J. Numer. Anal., 49 (2011), pp. 2302-2322.

Table 1.
Truncation errors and temporal convergence orders.
| N | Direct difference scheme (17)-(19) | Fast difference scheme (29)-(33) | |||||
| CPU(s) | CPU(s) | ||||||
| 80 | 1.02e-5 | 34.98 | 1.02e-5 | 33.46 | |||
| 0.1 | 160 | 2.67e-6 | 1.9323 | 78.63 | 2.67e-6 | 1.9323 | 75.52 |
| 320 | 6.60e-7 | 2.0159 | 214.52 | 6.60e-7 | 2.0159 | 161.22 | |
| 640 | 1.50e-7 | 2.1320 | 325.09 | 1.50e-7 | 2.1320 | 320.56 | |
| 80 | 2.78e-5 | 34.74 | 2.78e-5 | 38.59 | |||
| 0.5 | 160 | 6.97e-6 | 1.9943 | 89.78 | 6.97e-6 | 1.9943 | 78.55 |
| 320 | 1.72e-6 | 2.0195 | 155.16 | 1.72e-6 | 2.0195 | 157.49 | |
| 640 | 3.97e-7 | 2.1129 | 326.34 | 3.97e-7 | 2.1129 | 316.44 | |
| 80 | 3.09e-5 | 53.27 | 3.09e-5 | 33.52 | |||
| 0.9 | 160 | 7.70e-6 | 2.0035 | 141.53 | 7.70e-6 | 2.0039 | 73.62 |
| 320 | 1.91e-6 | 2.0158 | 278.45 | 1.91e-6 | 2.0147 | 154.67 | |
| 640 | 4.55e-7 | 2.0661 | 468.05 | 4.46e-7 | 2.0954 | 314.03 | |
Table 2.
Truncation errors and spatial convergence orders.
| M | Direct difference scheme (17)-(19) | Fast difference scheme (29)-(33) | |||||
| CPU(s) | CPU(s) | ||||||
| 8 | 2.44e-2 | 2315.75 | 2.44e-2 | 0.85 | |||
| 0.1 | 6 | 6.09e-3 | 2.0038 | 5880.66 | 6.09e-3 | 2.0038 | 0.95 |
| 32 | 1.52e-3 | 2.0010 | 3411.01 | 1.52e-3 | 2.0010 | 1.08 | |
| 64 | 3.80e-4 | 2.0003 | 2217.43 | 3.80e-4 | 2.0003 | 2.06 | |
| 8 | 1.78e-2 | 2214.54 | 1.78e-2 | 0.88 | |||
| 0.5 | 16 | 4.46e-3 | 1.9968 | 5235.00 | 4.46e-3 | 1.9968 | 0.99 |
| 32 | 1.12e-3 | 1.9992 | 2617.88 | 1.12e-3 | 1.9992 | 1.14 | |
| 64 | 2.79e-4 | 1.9998 | 5548.97 | 2.79e-4 | 1.9998 | 2.02 | |
| 8 | 1.10e-2 | 2791.54 | 1.10e-2 | 1.25 | |||
| 0.9 | 16 | 2.78e-3 | 1.9896 | 2885.54 | 2.78e-3 | 1.9899 | 1.12 |
| 32 | 6.95e-4 | 1.9974 | 2475.10 | 6.94e-4 | 1.9987 | 1.41 | |
| 64 | 1.74e-4 | 1.9994 | 2438.99 | 1.73e-4 | 2.0044 | 2.32 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



