
Submitted:
24 April 2025
Posted:
27 April 2025
You are already at the latest version
Abstract
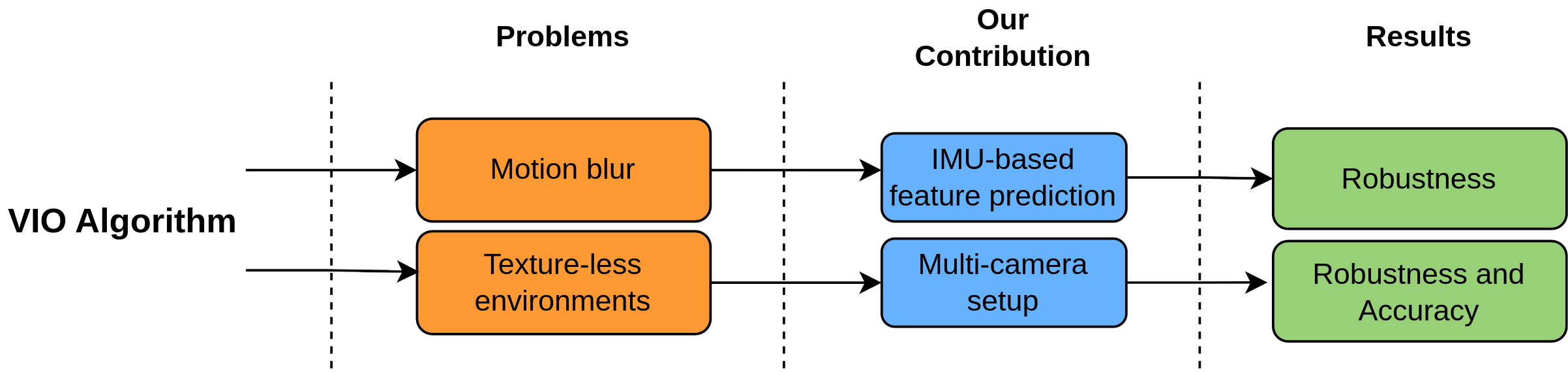
Visual-Inertial Odometry (VIO) algorithms are widely adopted for autonomous drone navigation in GNSS-denied environments. However, conventional monocular and stereo VIO setup often lack of robustness under challenging environmental conditions or during aggressive maneuvers, due to the sensitivity of visual information to lighting, texture, and motion blur. In this work, we enhance an existing open-source VIO algorithm to improve both the robustness and accuracy of the pose estimation. First, we integrate an IMU-based motion prediction module to improve feature tracking across frames, particularly during high-speed movements. Second, we extend the algorithm to support a multi-camera setup, which significantly improves tracking performance in low-texture environments. Finally, to reduce the computational complexity, we introduce an adaptive feature selection strategy that dynamically adjusts the detection thresholds according to the number of detected features. Experimental results validate the proposed approaches, demonstrating notable improvements in both accuracy and robustness across a range of challenging scenarios.
Keywords:
VIO
; multicamera
; localization
; GNSS-denied
; drones
; robotics
; autonomous
; navigation
1. Introduction
Visual-Inertial Odometry (VIO) is a widely used navigation solution for robotics, particularly in GPS-denied environments [1,2]. Processing IMU and images data, it is able to provide real-time position estimation in previously unknown environments. While LiDAR-based SLAM algorithms generally outperform VIO in terms of accuracy and robustness in structured, feature-rich environments [3,4], VIO remains advantageous in scenarios where LiDAR is ineffective, such as large open spaces with few detectable features [5,6]. Additionally, VIO is particularly well suited for drones due to the lower weight and occupied space of cameras compared to LiDAR sensors [7,8]. It’s worth noting that drones are typically equipped with cameras to collect visual information of the environment. Therefore, utilizing these cameras for both perception and localization optimizes onboard resource usage, enhancing overall system efficiency.
Despite its advantages, VIO suffers from inherent limitations, such as drift accumulation over time due to errors in IMU integration and inaccuracies in 3D feature tracking. Furthermore, motion blur during high-speed maneuvers and the presence of featureless environments can severely degrade tracking quality, potentially leading to failures in navigation.A notable example of VIO’s vulnerability occurred with NASA’s Ingenuity helicopter, which operated on Mars as part of the Mars 2020 mission. Ingenuity relied on a VIO system using a downward-facing monocular grayscale camera. On 18th January 2024, its last flight resulted in a crash causing damages in the blades and making the drone unable to fly again. NASA’s subsequent investigation confirmed that the featureless terrain was responsible for the crash [9]. This incident highlights the importance of enhancing VIO algorithms to ensure robustness in featureless environments. Over the past two decades, several VIO algorithms have been developed to improve localization accuracy and robustness. Non-Linear Factor Recovey (NFR) proposed in [10] has emerged as one of the most valuable solutions for visual-inertial mapping. This methodology is implemented in the open-source Basalt1 project. This VIO algorithm achieves state-of-the-art performance on benchmark datasets. Its main novelty lies in leveraging non-linear factors extracted from previous keyframes, which are subsequently used in the global bundle adjustment. In this work, we propose improvements to the Basalt project aimed at increasing its robustness, particularly in high-speed motion scenarios and featureless environments. Our contributions are summarized as follows:
- IMU-based Feature Prediction: We introduce a method for predicting feature positions in the next frame using IMU data. Instead of assuming that features remain at the same pixel across consecutive frames, our approach integrates IMU measurements to estimate feature displacement, starting from the last VIO-predicted position. This method improves tracking accuracy during rapid movements. Details are provided in Section 2.1.
- Multi-Camera Extension for Featureless Environments: To mitigate VIO failures in featureless scenarios, we extend Basalt to support a multi-camera setup. By increasing the field of view, this approach significantly reduces the possibility of encountering textureless regions that may lead the algorithm to fail. Implementation details are discussed in Section 2.2.
- Adaptive Threshold for Feature Extraction: Since the multi-camera setup results in a considerable increase of the computational complexity, we propose a dynamic feature detection strategy to mitigate the computational load. Specifically, we introduce an adaptive thresholding mechanism that adjusts feature detection parameters. The implementation of this optimization is detailed in Section 2.3.
Due to its high positional accuracy and efficient CPU usage, the open-source Basalt algorithm has been improved and adapted in other two open-source projects. In [11], the author modify Basalt for a monocular setup, introducing a novel method for evaluating the scale factor to locate the featured in the 3D space. The "Basalt for Monado" project2 integrates Basalt with Monado3, enhancing the tracking for XR devices and extending it to support multi-camera setups. However, to the best of our knowledge, no official documentation or published research papers describe this multi-camera implementation. With the goal of improving the robustness of VIO algorithms, several solutions have been proposed in the last decades. In [12] the authors propose a VIO algorithm based on line features. Their contribution consists of the reduction of the influence of lines upon dynamic objects on system robustness merging the results coming from the semantic segmentation, optical flow and re-projection error. Then, a weight-based method adjusts the line features matrix in the optimization process. The work in [13], proposes a methodology to enhance the performances of a VIO algorithm encountering different brightness conditions. The methodology couples a model-based Left Invariant Extended Kalman Filter (LIEKF) with a statistical neural network, both driven by raw inertial measurement. While these approaches mitigate common failures of VIO algorithms, textureless environments continue to pose a significant challenge. Due to its capability to capture images by multiple perspectives, a multi-camera setup remains one of the most effective and widely adopted solution to detect features in textureless environments.
The approach in [14] presents an implementation of a multi-camera setup, where two stereo cameras face opposite directions. The authors demonstrate its superiority over state-of-the-art VIO algorithms. However, since the paper was published in 2007, it relies on an Extended Kalman Filter (EKF) for pose estimation rather than modern optimization techniques such as Bundle Adjustment or Factor Graphs, which are widely used today. In [15] a generalized multi-camera approach is introduced. The work supports an arbitrary number of cameras in various configurations (overlapping and non-overlapping fields of view). This implementation is based on [16], one of the first versions of the well-known open-source SLAM algorithm. Similarly, [17] proposes an alternative multi-camera approach and compares it with [15], proving its superiority on custom datasets. The paper [18] presents another multi-camera setup, consisting of a stereo camera with two additional monocular cameras mounted on the sides. To optimize computational efficiency and performance, the authors track features from the stereo camera across the mono cameras, leveraging the shared field of view. Another approach [19] focuses specifically on configurations where camera fields of view do not overlap. Additionally, the article available at [20] details an implementation tailored for UAVs. While the proposed method supports an arbitrary number of cameras, the authors provide results only for a dual-camera setup. To the best of our knowledge, no existing research extends Basalt to a multi-camera setup. Moreover, none of the previous works have been explicitly tested on UAVs. A key challenge in deploying multi-camera systems on drones is the computational load. Since UAVs must allocate processing power to other demanding tasks such as image processing and perception algorithms, computationally intensive processes such as VIO algorithms must be optimized to maintain a bounded computational load. Previous studies do not address CPU consumption. The paper [21] analyzes computational load in a multi-camera setup, comparing the proposed algorithm to ORB-SLAM 3 ([22], including CPU usage. However, reported CPU loads are never above the 300% for more than 2 cameras. This makes the algorithm impractical for many onboard computers commonly used in autonomous drones, such as Jetson platforms. In [23] the authors propose an implementation of a multi-camera setup with non-overlapping images. Even if the paper provides CPU load considerations, the performance are evaluated without tracking features across the cameras. While this approach accomplish for a reduction of the CPU load, it omits the features triangulation in the current frame, compromising the accuracy of the 3D landmarks estimated position. In this paper, we propose improvements to the Basalt algorithm, specifically aimed at enhancing UAV localization. To enable the extension of Basalt to a multi-camera setup while ensuring feasibility on resource-constrained UAV platforms, we introduce a methodology for reducing computational load.
2. Materials and Methods
2.1. IMU-Based Feature Prediction
To track a feature from one frame to another, Basalt employs a frame-to-frame approach. For each camera, the features from the previous frame are tracked by searching for similar patterns in the image using the Lucas-Kanade method. The accuracy of this tracking depends heavily on the initial choice of the feature’s pixel position in the previous frame. Basalt’s original implementation initializes the position of the feature based on its location in the previous frame, assuming that the feature’s position hasn’t changed significantly between frames and that no motion blur has occurred. This assumption works well when the camera motion is slow and the scene remains relatively stable. However, when rapid movements occur, the feature’s position can change drastically between frames, making it challenging to track it accurately. In such cases, the algorithm may fail to track features reliably, which can compromise the accuracy of the estimated trajectory. This is especially problematic in drone applications, where fast movements and rapid changes in orientation are common. In these scenarios, having a method to estimate the feature positions without being constrained by the actual frame-to-frame motion could significantly improve the robustness of the tracking.
To address this, we integrates in Basalt a methodology that leverages IMU data to predict the feature positions before a new camera frame is available. The approach begins by estimating the last position of the camera based on the VIO algorithm and then uses the IMU data to predict the camera’s position in the next frame. As soon as the new frame arrives, the relative transformation between the previously estimated camera position and the actual position is calculated. This transformation is then used to estimate the feature positions in the new frame, accounting for the extrinsic calibration parameters of each camera.
Relying on IMU data makes the tracking of features more resilient to fast movements, ensuring a more accurate and robust estimation of the trajectory even under challenging conditions such as rapid drone motion. This methodology helps improve the overall performance of the VIO system, making it more reliable for real-time applications where high-speed motion is common.
Given the reference system of the camera (C), and an inertial reference system (W), the angular velocity and the acceleration of the camera C with respect to the reference system W are
where
- is the true angular velocity of the camera estimated by the IMU
- is the gyroscope bias
- is the accelerometer bias
- is the gyroscope noise
- is the accelerometer noise
- is the rotation of the camera frame with respect to the inertial frame
- is the gravity acceleration in the inertial reference system
The derivative of the rotation of the camera frame with respect to the inertial frame can be evaluated by.:
Integrating (3) we obtain the rotation of the camera in the next time step:
Integrating two times (2), we can obtain the position of the camera in the inertial reference system in the next time step:
where is the velocity of the camera with respect to the inertial reference system.
The equations (4) and (5) can be used to predict the position of the camera in the current frame at . The transformation matrix between the camera from the current frame to the previous frame is:
where
Now we unproject each feature to obtain the homogeneous coordinates and rescale them by the average depth evaluated in the previous step to obtain the 3D position of the feature :
where is the average depth of the landmark collected in the previous steps. Note that the feature position refers to the previous time step . Knowing the 3D position of each feature in the previous time step , we can predict their 3D position at the current frame :
Then we can project the 3D feature in the image plane knowing the intrinsics calibration parameters of the camera to estimate the positions of the features in the current frame.
2.2. Multicamera Setup
A multicamera setup enhances a VIO algorithm in two ways:
- It increases the field of view, allowing for the tracking of more features across frames.
- It improves the 3D position estimation of landmarks, as more observations of the same landmark are made from different baselines.
To generalize Basalt for a multi-camera setup, we extend the optical flow generation process to accommodate an arbitrary number of cameras. We detail our methodology for tracking features across images when portions of the field of view are shared between multiple cameras, and for extracting new features in the remaining areas of the image. Then we generalize the landmark selection to be suitable for the multi-camera setup.
2.2.1. Optical Flow Generalization
Optical flow consists of all the features extracted in a single frame, with each feature assigned a unique ID and its coordinates in the image plane.
In its original implementation, Basalt was designed to run on a stereo setup. The optical flow was generated by extracting features from the left image using the FAST algorithm, and then tracking them on the right camera using the Lucas-Kanade method. In the next frame, features from the previous frame were tracked across both images. Basalt’s optical flow is reliable, thanks to pyramid levels, recursive tracking, and point filtering. However, this approach only works with one stereo camera and is unable to handle a multi-camera setup.
In our implementation, we generalize the optical flow generation to support multiple cameras. We account for the possibility that one camera might share part of its field of view with another. In the shared region of the image, we track features from one camera to the other. Then, we extract new features in the remaining part of the image and track them on another camera if its field of view overlaps with that of another camera.
To achieve this generalization, we implement a parent-child structure for camera relationships. In this structure, each of the N cameras may have one parent and from zero to M children cameras. The parent of the camera i specifies the camera j that the camera i shares a part of the field of view with. For the parent of the camera i, a bounding box has to be defined with the shared region of the camera i with camera j. The children of the camera i indicate which cameras share a part of the field of view with i. The shared region of the children with camera i has to be defined for each child.
The process works as follows: first, we extract features from the image captured from camera i, excluding the bounding box specified by its parent. Then, we track these features across the bounding boxes of each child camera. If a camera has no parent, we extract features from the entire image.
With this methodology, any multi-camera setup can be accommodated. The relationships between the parent and child cameras, as well as the bounding boxes for the shared fields of view, must be manually provided before running the algorithm.
2.2.2. Keyframe Generation
In the original implementation of the algorithm, new landmarks were added triangulating the unconnected features of the left camera of the stereo setup. When the ratio between the unconnected features of the left camera and the total amount of features tracked in the current frame was below a threshold, the features are triangulated across the previous frame. Then a new observation was added to the landmark database. Since this approach is only suitable for a stereo camera setup, we propose an implementation to accomplish the landmark database update for a multi-camera setup. For each frame, we evaluate the unconnected points for each camera. For each camera that share the field of view with another one, we evaluate the ratio between the unconnected and the total amount of features. If at least one of the ratios is below a threshold we triangulate the unconnected points across the previous frame. In this way we enable the algorithm to generate keyframes for each camera and not only for the left camera of the original stereo configuration.
| Algorithm 1 Original Stereo Camera Keyframe Selection |
|
| Algorithm 2 Multicamera Keyframe Selection (Ours) |
|
2.3. Adaptive Threshold for Feature Selection
While a multi-camera setup is very convenient in terms of position accuracy and localization robustness, it is responsible for a hight CPU consumption. Especially for applications involving drones, the CPU that can be dedicated to the localization algorithm has to be constrained to enable the onboard computer to handle many other tasks (path planning, obstacle avoidance, data elaboration). The hightest consumption from a VIO algorithm comes from the optical flow generation. One of the most expensive job in terms of CPU consumption is related to the tracking of the features. In many situations a multi-camera setup may overcome the 400% of CPU consumption because all cameras are tracking a hight number of features. To avoid that the multi-camera setup would track too many features, increasing considerably the computational load, we propose a methodology to reduce the number of the tracked features adaptively.
Basalt algorithm uses a threshold to extract features from an image with FAST algorithm. The threshold defines the minimum difference between the intensity of the candidate pixel and the surrounding pixels and it is initialized to a fixed value. If the algorithm was not able to find enough features, the threshold is reduced and new features are extracted. In a multi-camera setup, when a high number of features is tracked from one camera to N cameras, the triangulation process will lead to a good estimate of the 3D position of the feature. This will result in a good quality of position accuracy and high localization robustness. In such a situation, tracking features with the other cameras of the setup might be pointless and would increase the CPU loading considerably without any substantial improvements in position accuracy and robustness. We propose an implementation to adaptively select the feature detection threshold for each camera of the configuration. In our implementation, the threshold is divided by the squared root of a scale factor. The scale factor is defined as:
where r is the ratio between the amount of features tracked from the camera i to all his children (cameras that share the filed of view with i) and a fixed value that represent the minimum number of features to have .
If is minor than 0, we take 0 to always have . Therefore, the scale factor is evaluated for the camera i and it will be used to scale the threshold of the camera . If the camera has tracked a number of features close to , the scale factor of the threshold for the camera will be close to 1 and the algorithm will be able to compensate the lack of the feature for the camera i.
3. Results
3.1. IMU-Based Feature Prediction
We compare the error in feature position estimates with and without the IMU prediction across three datasets: , , and . In each dataset, the camera rotates around an axis perpendicular to the image plane, with the rotation speed increasing from the easy to the difficult dataset.
For each dataset, we calculate the Root Mean Square Error (RMSE) between the predicted and actual feature positions. The RMSE is evaluated over 200 frames for each dataset, and the maximum error is also reported. The results are summarized in Table 1.
When using IMU prediction, both the RMSE and the maximum error are significantly reduced. As a result, the IMU prediction helps the algorithm to be much less sensitive to fast feature movements, improving its robustness.
To further assess the quality of the prediction, in Figure 1 we present two histograms for each dataset: one for the case with IMU prediction and one without. Since feature tracking can fail due to large position estimation errors, these histograms demonstrate the effectiveness of our IMU-based approach in tracking more features during fast camera movements. Without IMU prediction, the error distribution is highly sensitive to movement speed. In contrast, with IMU prediction, the error remains centered around zero for the majority of features.
3.2. Multi-Camera Implementation
We divide the experimental tests in two typologies: accuracy tests and robustness tests. The accuracy tests provide a comparison of the multi-camera setup with a single stereo camera setup in terms of accuracy. The robustness tests, evaluate both setups in scenarios where the stereo camera does not track any features, leading to a rapid accumulation of drift.
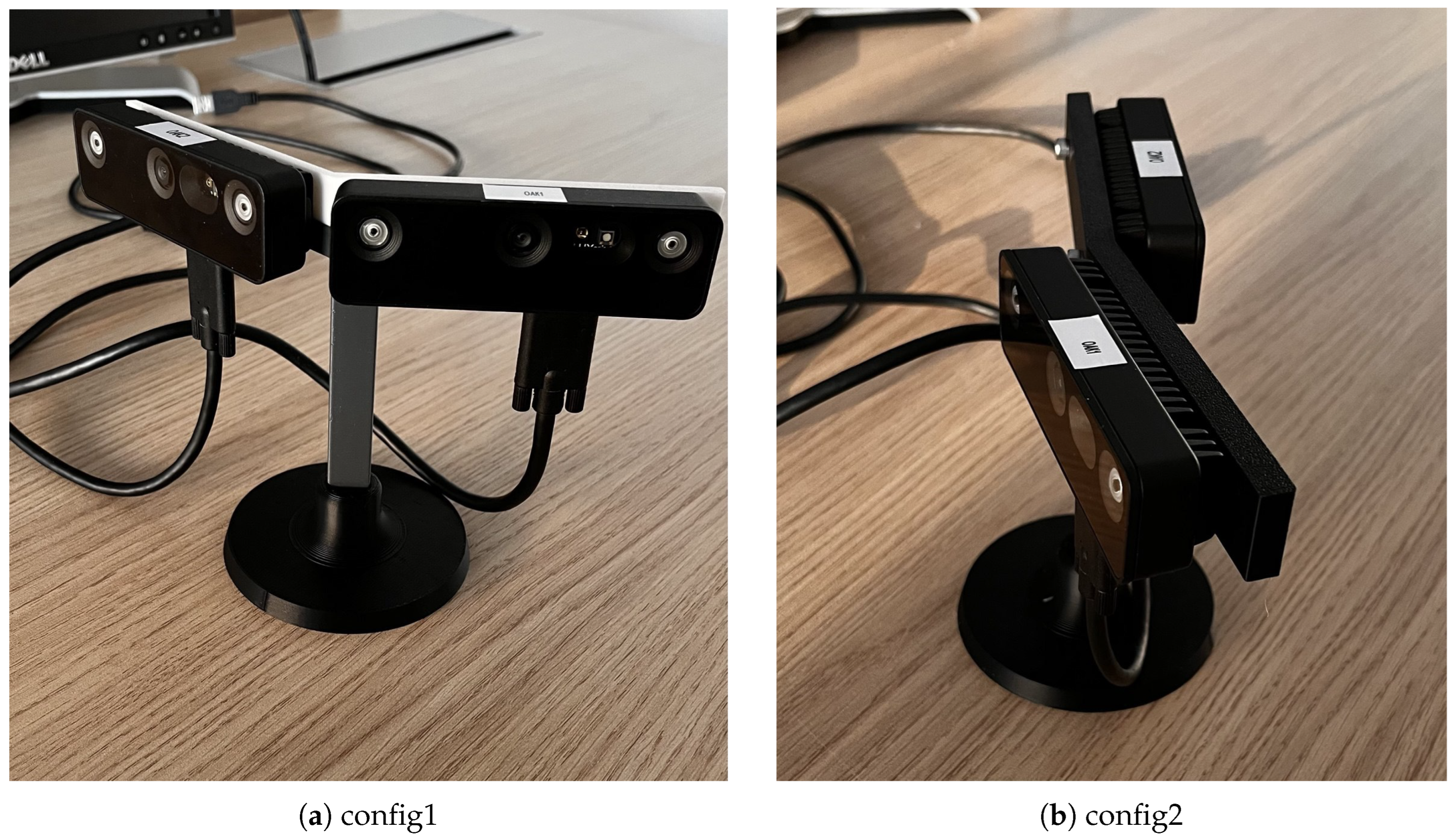
For both test typologies we used two stereo cameras Oak D-Pro Wide4 from Luxonis streaming the images at 30 Hz with a 640x600 resolution.
3.2.1. Accuracy
A VICON room has been used to evaluate the quality of the localization of a multi-camera setup. We collect the data for two different multi-camera configurations:
Figure 2 outlines the shared field of view for each camera. The difference between the two configurations is that has a wider field compared to . Instead, in , we can track features on more than one camera, increasing the observations for the same feature. Figure 3 illustrates the experimental setup. For each configuration we have collected two different datasets: and refers to while Dataset 3 and Dataset 4 refers to . Both datasets have been recorded starting from the VICON room and then moving around corridors. After returning to the VICON room we evaluate the accumulated error with respect to the ground truth. This approach was chosen because the corridors where we collected the datasets present challenging conditions for VIO algorithms, such as:
- Featureless walls (white walls)
- Reflecting glazed
- Areas with poor lighting conditions
Figure 2.
The stereo camera configurations: (a) 1 (cam0 and cam1, yellow field of view) and 2 (cam2 and cam3, red field of view) with shared field of view between cam1 and cam2 (blue); (b) 1 and 2 with non-overlapping fields of view.
Figure 2.
The stereo camera configurations: (a) 1 (cam0 and cam1, yellow field of view) and 2 (cam2 and cam3, red field of view) with shared field of view between cam1 and cam2 (blue); (b) 1 and 2 with non-overlapping fields of view.
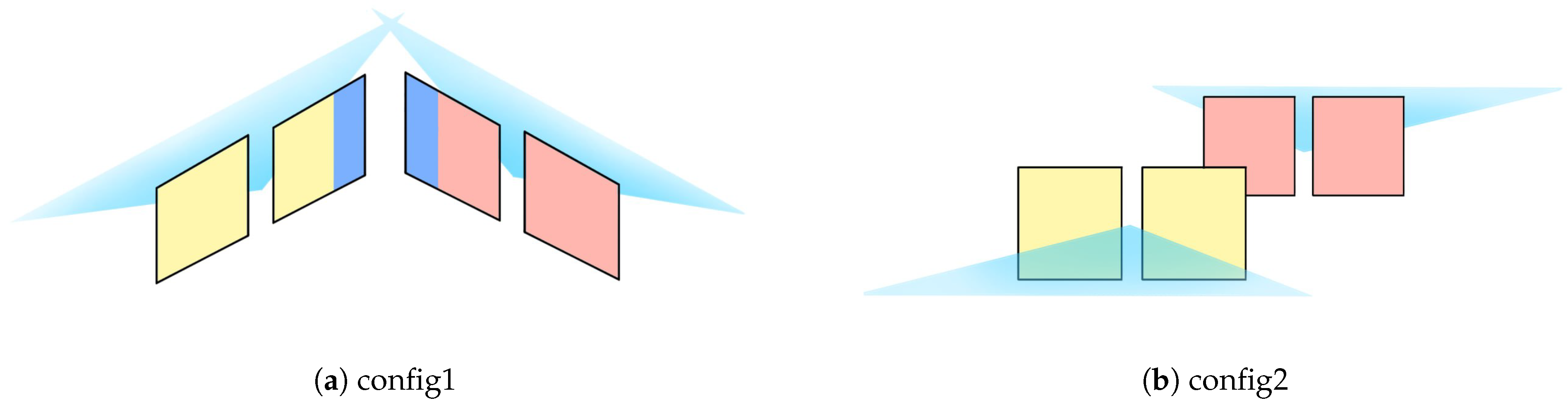
Figure 3.
The two configurations of the multi-camera setup: (a) The two stereo cameras have a relative angle of 45 degrees; (b) The two stereo cameras point in different directions.
Figure 3.
The two configurations of the multi-camera setup: (a) The two stereo cameras have a relative angle of 45 degrees; (b) The two stereo cameras point in different directions.
Once returned in the VICON room, we provide a comparison between the ground truth and Basalt trajectory for each dataset. We use the Root Mean Square Error of the Absolute Trajectory Error (RMSE ATE) as the metric to evaluate the accuracy of the estimated trajectory. For each configuration, the ground truth is compared with:
- The trajectory of the first stereo camera ( 1)
- The trajectory of the second stereo camera ( 2)
- The trajectory of the multi-camera setup ()
- The trajectory of the multi-camera setup with the Adaptive Threshold ()introduced in Section 2.3.
Five trials have been recorded for each case over all datasets to reduce the impact of stochastic data. The results are summarized in Table 2 and Table 3, while in Figure 4 we provide a comparison of the trajectory with the ground truth in the plane for two datasets and all setups.
The multi-camera setup has the lowest RMSE ATE for all recorded datasets. The Adaptive Threshold methodology reduces considerably the computational load and it performs even better than on . The comparison of the CPU load in Figure 5 shows that both setups are affordable in terms of CPU demanding for the most common onboard computers employed for autonomous drones, such as Jetson NVIDIA platforms.
3.2.2. Robustness
Since these tests have been conducted to prove the redundancy of our multi-camera implementation, only has been considered. Indeed, quite similar results would be obtained with . We recorded a dataset in which Stereo 1 was oriented toward a featureless white wall, while stereo 2 was directed toward a region with trackable features (see Figure 6. During data collection, the cameras remained stationary. In Table 4, we evaluate the positional drift of the estimated trajectory after 3, 5, and 10 seconds for both the Stereo 1 and the multi-camera setups. We report the last estimated position for both configurations. As expected, the estimated position by the Stereo 1 rapidly drift from 0 m due to the lack of tracked features. Thanks to the redundancy introduced by the Multicamera the estimated position of this setup is stable around 0 m.
Even if these results are obvious once a multi-camera setup is employed, we showed them to highlight:
- The correctness of the implementation
- The sensitivity of a single stereo camera setup when featureless environments occur, even for few seconds.
Figure 6.
The multi-camera setup during robustness testing: and (Stereo 1); and (Stereo 2).
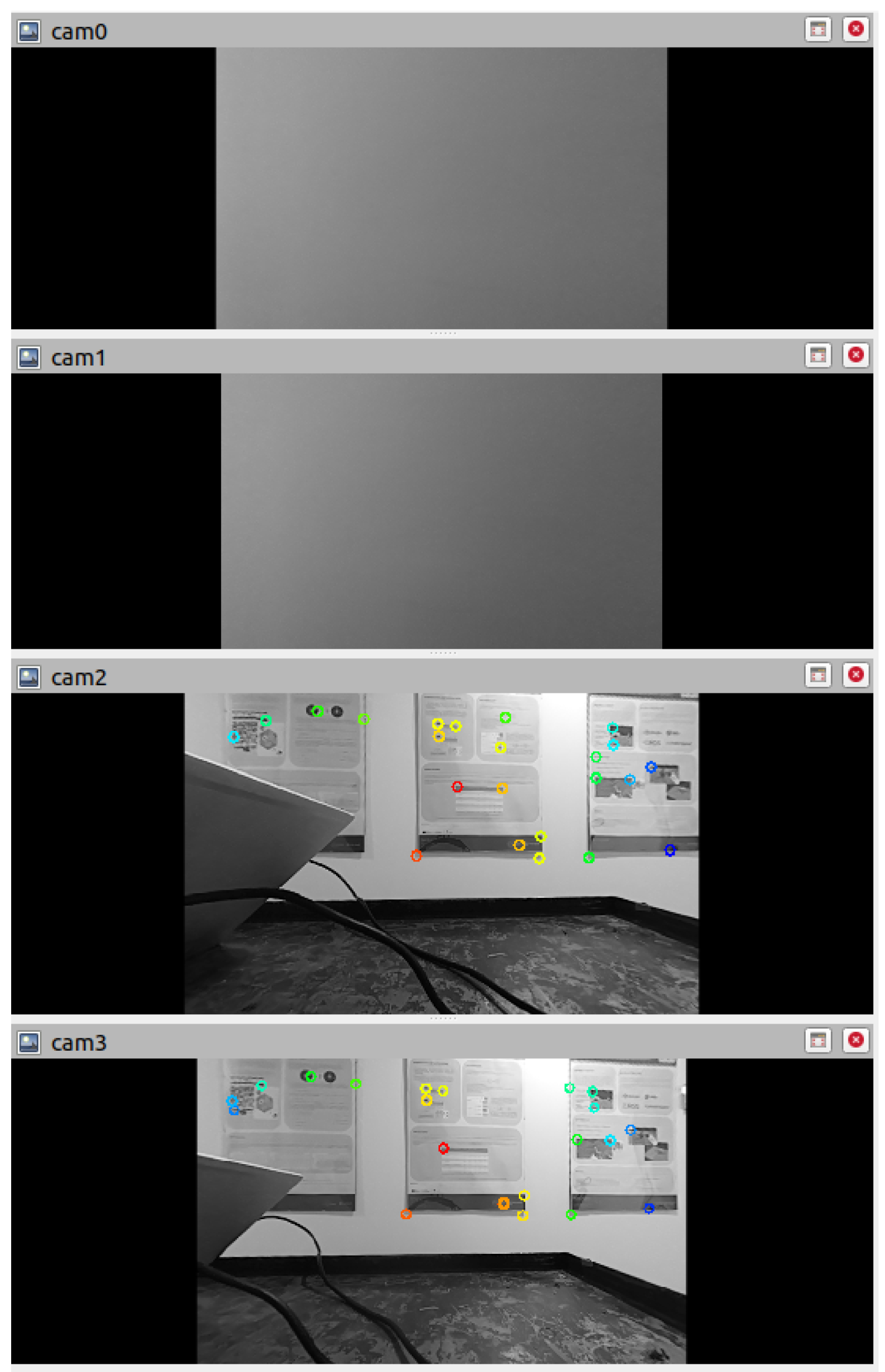

Table 4.
Comparison of final estimated position (meters) between Stereo 1 and Multicamera setups.
| Configuration | 3s | 5s | 10s | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| X | Y | Z | X | Y | Z | X | Y | Z | |||
| Stereo 1 | -1.21 | -0.28 | 4.64 | -2.79 | -1.02 | 13.14 | -13.99 | -33.86 | 53.94 | ||
| Multicamera | -0.04 | 0.00 | 0.08 | -0.04 | -0.08 | -0.00 | 0.00 | 0.01 | 0.05 | ||
4. Discussion
The IMU-based feature prediction significantly enhances feature tracking performance during high-speed maneuvers. Experimental results demonstrate a reduction in the prediction error, leading to more stable tracking of features across consecutive frames. The provided histograms prove the low dispersion of the prediction error when adopting the IMU-based prediction. Considering that the tracking typically fails for errors grater than 30 pixel, in the dataset, more than 3000 features (out of approximately 15000 features) would be lost without the IMU-based prediction. This highlights the effectiveness of the implementation during aggressive motions.
The multi-camera implementation presented in this work supports arbitrary configurations. We evaluated its performance in terms of accuracy and robustness across two different configurations. The multi-camera setup offers improved localization accuracy compared to a traditional stereo configuration in challenging environments. However, determining the optimal camera configuration is not straightforward, as it strongly depends on the specific dataset and the characteristics of the surrounding environment.
For all datasets, the stereo 2 shows RMSE ATE greater than the stereo 1. This is because the estimated position of the stereo 2 relies on the IMU of the stereo 1. Since the relative position of the cameras of the stereo 2 are further from the IMU than the cameras of the stereo 1, larger errors of the relative transformation are introduced during the calibration process. This explains why in some cases the RMSE ATE of a single stereo camera is very close to the multi-camera setup.
The proposed Adaptive Threshold methodology contributes to system robustness, reducing the average CPU load by approximately 60%. While the standard multi-camera setup occasionally experiences CPU usage spikes of up to 500%, the integration of adaptive thresholds effectively mitigates these peaks. However, this approach also introduces greater sensitivity to the dataset characteristics, compared to the multi-camera setup.
While the accuracy of the position heavily depends on the quality of the calibration, the multi-camera setup considerably increases the robustness of the localization without being affected by minimal errors in the estimation of the extrinsic calibration parameters. The conducted robustness tests highlight the superior performance of the multi-camera configuration in handling feature-poor environments, while also revealing how quickly the localization accuracy of a stereo setup deteriorates under such challenging conditions.
5. Conclusions
In this paper, we addressed the limitations of VIO-based localization algorithms in scenarios affected by motion blur and low-texture environments. The IMU-based feature prediction improves the robustness of the algorithm when aggressive motions occurs. The multi-camera setup improves the accuracy and the robustness of the position, but minor errors in extrinsic calibration parameters arises when cameras are far apart from each other, penalizing the accuracy of the estimated position. Since the algorithm was designed to be executed onboard a drone, a special attention was paid to minimizing CPU usage. The proposed improvements result in enhanced accuracy and robustness while maintaining a processing load compatible with typical onboard computers used in autonomous drones, such as the NVIDIA Jetson platforms. Dronomy5, a Spanish company specializing in autonomous drone development based in Madrid, is currently testing this implementation on its platforms for warehouse inventory management and other indoor navigation applications.
Figure 7.
Dronomy’s quadcopter flying with our VIO implementation while performing an inventory in a warehouse.
Figure 7.
Dronomy’s quadcopter flying with our VIO implementation while performing an inventory in a warehouse.

Acknowledgments
This work has been developed with the contribution of Dronomy and the Politecnico di Torino Interdepartmental Centre for Service Robotics6.
References
- Balamurugan, G.; Valarmathi, J.; Naidu, V.P.S. (2016). Survey on UAV navigation in GPS denied environments. In Proceedings of the 2016 International Conference on Signal Processing, Communication, Power and Embedded System (SCOPES), Paralakhemundi, India, pp. 198-204. [CrossRef]
- Gyagenda, N.; Hatilima, J.V.; Roth, H.; Zhmud, V. (2022). A review of GNSS-independent UAV navigation techniques. Robotics and Autonomous Systems, 152, 104069. [CrossRef]
- Mohamed, S.A.S.; Haghbayan, M.-H.; Westerlund, T.; Heikkonen, J.; Tenhunen, H.; Plosila, J. (2019). A Survey on Odometry for Autonomous Navigation Systems. IEEE Access, 7, 97466–97486. [CrossRef]
- Lee, D.; Jung, M.; Yang, W.; Kim, A. (2024). Lidar odometry survey: recent advancements and remaining challenges. Intelligent Service Robotics, 17(2), 95–118. [CrossRef]
- Mohamed, S.A.S.; Haghbayan, M.-H.; Westerlund, T.; Heikkonen, J.; Tenhunen, H.; Plosila, J. (2019). A survey on odometry for autonomous navigation systems. IEEE Access, 7, 97466–97486. [CrossRef]
- Cheng, J.; Zhang, L.; Chen, Q.; Hu, X.; Cai, J. (2022). A review of visual SLAM methods for autonomous driving vehicles. Engineering Applications of Artificial Intelligence, 114, 104992. [CrossRef]
- Santamaria-Navarro, A.; Thakker, R.; Fan, D.D.; Morrell, B.; Agha-mohammadi, A. (2022). Towards Resilient Autonomous Navigation of Drones. In: Asfour, T., Yoshida, E., Park, J., Christensen, H., Khatib, O. (eds) Robotics Research. ISRR 2019. Springer Proceedings in Advanced Robotics, vol 20. Springer, Cham. [CrossRef]
- Delmerico, J.; Scaramuzza, D. (2018). A Benchmark Comparison of Monocular Visual-Inertial Odometry Algorithms for Flying Robots. In: 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, pp. 2502–2509. [CrossRef]
- Nasa, Jet Propulsion Laboratory (2024). NASA Performs First Aircraft Accident Investigation on Another World. Available online: https://www.jpl.nasa.gov/news/nasa-performs-first-aircraft-accident-investigation-on-another-world/ (accessed on 7/04/2025).
- Usenko, V.; et al. Visual-Inertial Mapping with Non-Linear Factor Recovery. IEEE Robot. Autom. Lett. 2020, 5, 422–429, Presented at ICRA 2020. [Google Scholar]
- Wudenka, M.; et al. Towards Robust Monocular Visual Odometry for Flying Robots on Planetary Missions. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September-1 October 2021; pp. 8737–8744. [Google Scholar]
- Wu, J.; Xiong, J.; Guo, H. (2022). Improving robustness of line features for VIO in dynamic scenes. Measurement Science and Technology, 33(6), 065204.
- Yang, D.; Liu, H.; Jin, X.; Chen, J.; Wang, C.; Ding, X.; Xu, K. (2024). Enhancing VIO Robustness Under Sudden Lighting Variation: A Learning-Based IMU Dead-Reckoning for UAV Localization. IEEE Robotics and Automation Letters, 9(5), 4535–4542. [CrossRef]
- Oskiper, T.; Zhu, Z.; Samarasekera, S.; Kumar, R. Visual Odometry System Using Multiple Stereo Cameras and Inertial Measurement Unit. In Proceedings of the 2007 IEEE Conference on Computer Vision and Pattern Recognition, Minneapolis, MN, USA, 17-22 June 2007; pp. 1–8. [Google Scholar]
- Urban, S.; Hinz, S. MultiCol-SLAM - A Modular Real-Time Multi-Camera SLAM System. arXiv 2016, arXiv:1610.07336. [Google Scholar]
- Mur-Artal, R.; Tardós, J.D. Visual-inertial monocular SLAM with map reuse. IEEE Robot. Autom. Lett. 2017, 2, 796–803. [Google Scholar]
- Kaveti, P.; Vaidyanathan, S.N.; Chelvan, A.T.; Singh, H. Design and Evaluation of a Generic Visual SLAM Framework for Multi Camera Systems. IEEE Robot. Autom. Lett. 2023, 8, 7368–7375. [Google Scholar]
- Zhang, L.; Wisth, D.; Camurri, M.; Fallon, M. Balancing the Budget: Feature Selection and Tracking for Multi-Camera Visual-Inertial Odometry. IEEE Robot. Autom. Lett. 2022, 7, 1182–1189. [Google Scholar]
- Li, S.; Pang, L.; Hu, X. MultiCam-SLAM: Non-overlapping Multi-camera SLAM for Indirect Visual Localization and Navigation. arXiv 2024, arXiv:2406.06374. [Google Scholar]
- Yang, S.; Scherer, S.A.; Yi, X.; Zell, A. Multi-camera visual SLAM for autonomous navigation of micro aerial vehicles. Robot. Auton. Syst. 2017, 93, 116–134. [Google Scholar]
- Yu, H.; Wang, J.; He, Y.; Yang, W.; Xia, G.-S. MCVO: A Generic Visual Odometry for Arbitrarily Arranged Multi-Cameras. arXiv 2025, arXiv:2412.03146. [Google Scholar]
- Campos, C.; Elvira, R.; Rodríguez, J.J.G.; Montiel, J.M.M.; Tardós, J.D. (2021). ORB-SLAM3: An Accurate Open-Source Library for Visual, Visual-Inertial, and Multi-Map SLAM. IEEE Transactions on Robotics, 37(6), 1874–1890. [CrossRef]
- He, Y.; Yu, H.; Yang, W.; Scherer, S. Toward Efficient and Robust Multiple Camera Visual-inertial Odometry. arXiv 2021, arXiv:2109.12030. url: https://arxiv.org/abs/2109.12030. [Google Scholar]
| 1 | |
| 2 | |
| 3 | |
| 4 | |
| 5 | |
| 6 | PIC4SeR https://pic4ser.polito.it
|
Figure 1.
Impact of the IMU prediction: (a) The histogram for the dataset counts the occurrences of features with prediction errors in pixel units. (b) The dataset error distribution. (c) The dataset error distribution. Data were collected over 200 frames.
Figure 1.
Impact of the IMU prediction: (a) The histogram for the dataset counts the occurrences of features with prediction errors in pixel units. (b) The dataset error distribution. (c) The dataset error distribution. Data were collected over 200 frames.
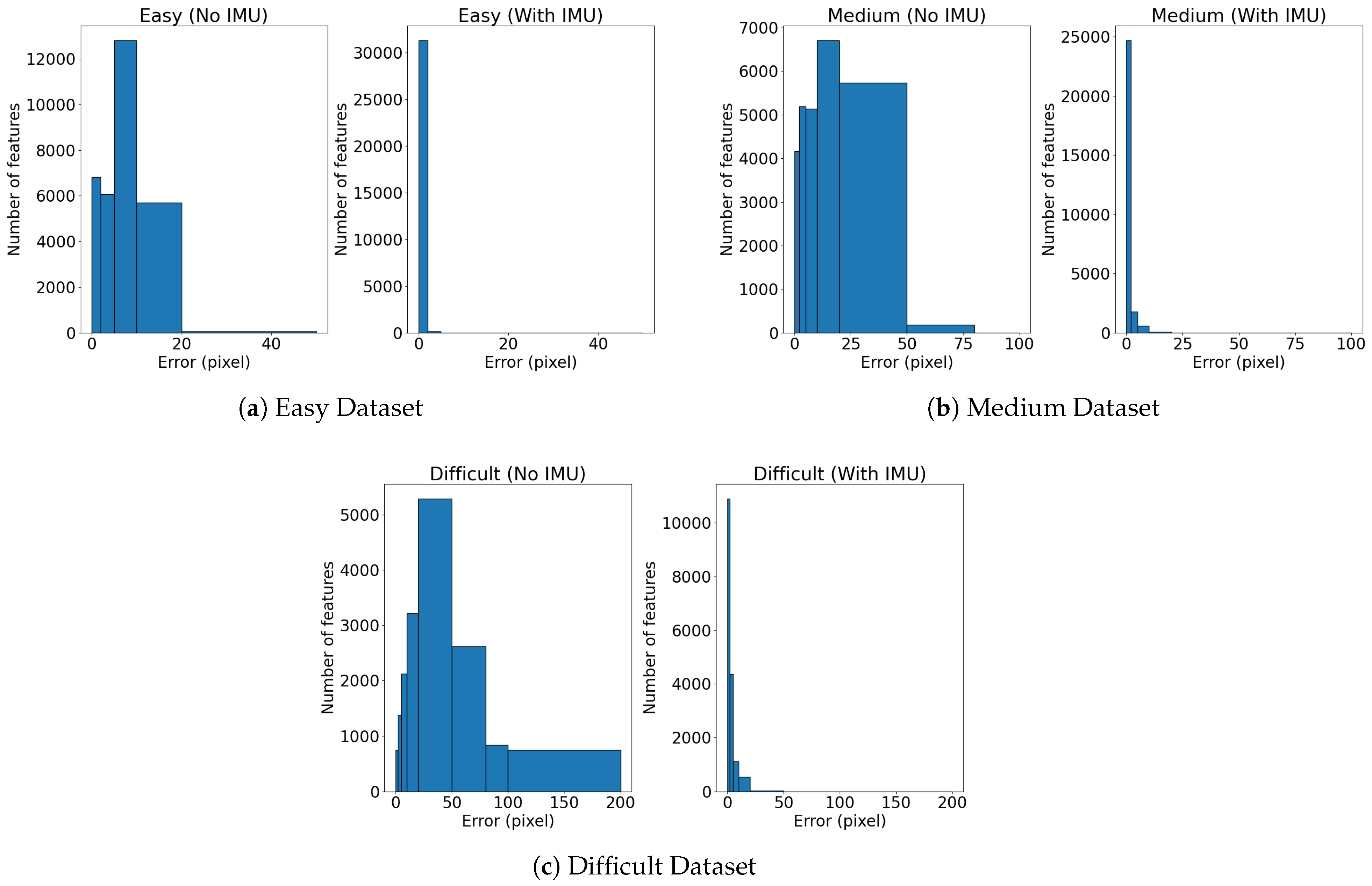
Figure 4.
Comparison of the trajectory in the plane: (a) Trajectories for performing on Dataset 2; (b) Trajectories for performing on Dataset 3. The trajectories refer to the data collected after returning to the VICON room
Figure 4.
Comparison of the trajectory in the plane: (a) Trajectories for performing on Dataset 2; (b) Trajectories for performing on Dataset 3. The trajectories refer to the data collected after returning to the VICON room
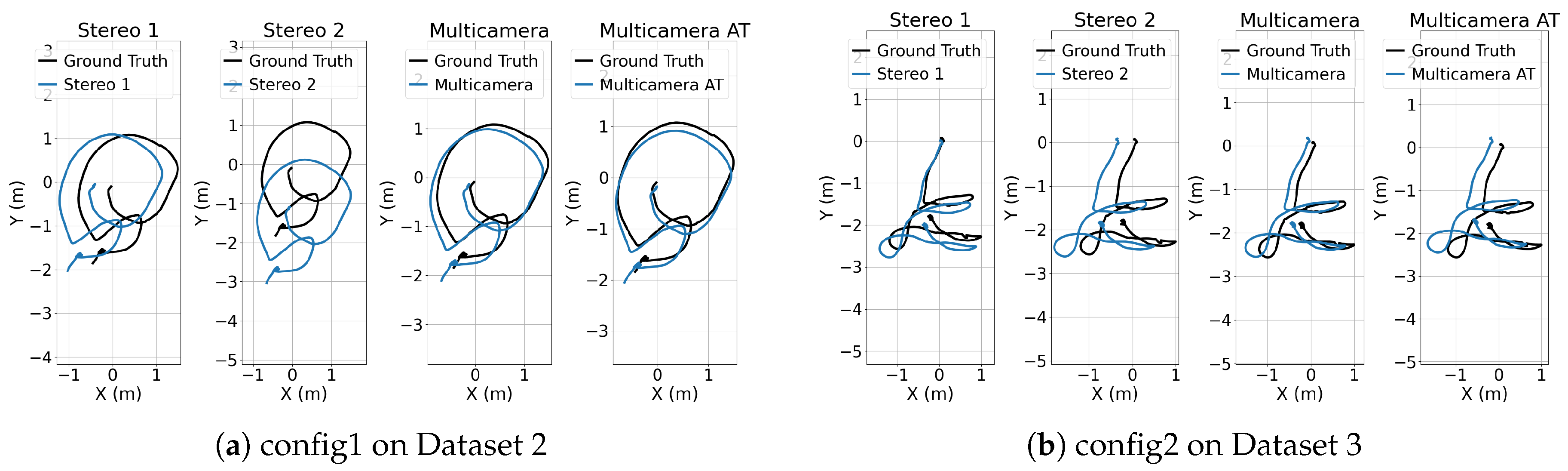
Figure 5.
CPU load comparison: (a) Configuration 1 performance on Dataset 1; (b) Configuration 2 performance on Dataset 3. Both graphs compare the multi-camera setup with and without adaptive threshold, evaluated at 30 Hz streaming with 640×600 resolution.
Figure 5.
CPU load comparison: (a) Configuration 1 performance on Dataset 1; (b) Configuration 2 performance on Dataset 3. Both graphs compare the multi-camera setup with and without adaptive threshold, evaluated at 30 Hz streaming with 640×600 resolution.
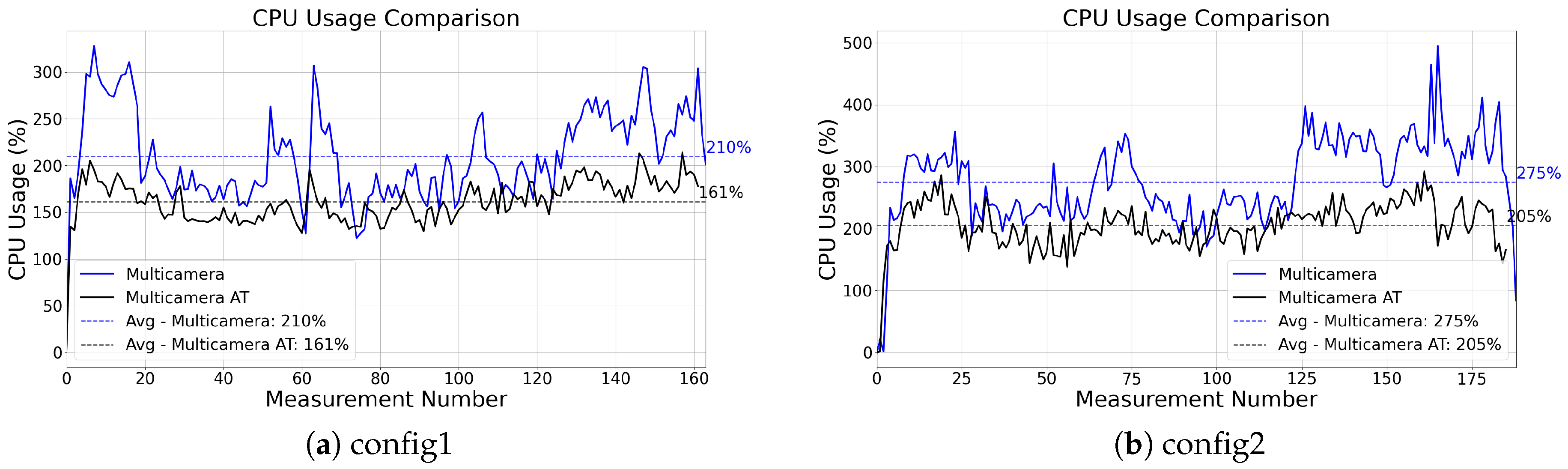
Table 1.
RMSE comparison: for each dataset the RMSE and the maximum error of the prediction is reported in pixel units.
Table 1.
RMSE comparison: for each dataset the RMSE and the maximum error of the prediction is reported in pixel units.
| Dataset | No IMU | With IMU | |||
|---|---|---|---|---|---|
| RMSE (pixel) | Max Error (pixel) | RMSE (pixel) | Max Error (pixel) | ||
| Easy | 0.618424 | 29.931 | 0.000191192 | 6.58159 | |
| Medium | 5.52039 | 81.4071 | 0.00369094 | 17.3121 | |
| Difficult | 27.1248 | 195.042 | 0.134087 | 74.8954 | |
Table 2.
RMSE ATE comparison (values in meters) for with average CPU load percentages. For each dataset, the total traveled distance is indicated in parentheses next to the dataset name.
Table 2.
RMSE ATE comparison (values in meters) for with average CPU load percentages. For each dataset, the total traveled distance is indicated in parentheses next to the dataset name.
| config1 | Dataset 1 (148 m) | Dataset 2 (171 m) | CPU | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | AVG | 1 | 2 | 3 | 4 | 5 | AVG | |||
| Stereo 1 | 1.23 | 1.55 | 1.41 | 1.17 | 1.36 | 1.34 | 0.63 | 0.62 | 0.56 | 0.54 | 0.48 | 0.57 | 148% | |
| Stereo 2 | 1.66 | 1.92 | 2.03 | 1.69 | 1.75 | 1.81 | 1.10 | 1.40 | 1.29 | 1.09 | 1.33 | 1.24 | 151% | |
| Multicam | 1.29 | 1.25 | 1.19 | 1.23 | 1.14 | 1.22 | 0.26 | 0.27 | 0.35 | 0.28 | 0.27 | 0.29 | 275% | |
| Multicam AT | 0.63 | 1.00 | 0.57 | 0.78 | 1.01 | 0.80 | 0.24 | 0.53 | 0.37 | 0.20 | 0.36 | 0.34 | 205% | |
* Results from 5 trials per configuration. Best average errors highlighted in bold. CPU load measured at 30Hz with 640×600 resolution.
Table 3.
RMSE ATE comparison (values in meters) for with average CPU load percentages. For each dataset, the total traveled distance is indicated in parentheses next to the dataset name.
Table 3.
RMSE ATE comparison (values in meters) for with average CPU load percentages. For each dataset, the total traveled distance is indicated in parentheses next to the dataset name.
| config2 | Dataset 3 (142 m) | Dataset 4 (164 m) | CPU | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | AVG | 1 | 2 | 3 | 4 | 5 | AVG | |||
| Stereo 1 | 0.21 | 0.29 | 0.29 | 0.57 | 0.33 | 0.34 | 0.95 | 0.92 | 1.09 | 0.98 | 0.96 | 0.98 | 109% | |
| Stereo 2 | 1.13 | 1.08 | 0.63 | 1.16 | 0.61 | 0.92 | 1.12 | 1.32 | 1.24 | 1.25 | 1.65 | 1.31 | 122% | |
| Multicam | 0.23 | 0.22 | 0.44 | 0.34 | 0.27 | 0.30 | 0.47 | 0.63 | 0.45 | 0.46 | 0.47 | 0.49 | 210% | |
| Multicam AT | 1.30 | 0.50 | 0.47 | 0.89 | 0.56 | 0.74 | 1.85 | 1.52 | 1.73 | 1.55 | 1.57 | 1.64 | 161% | |
* Results from 5 trials per configuration. Best average errors highlighted in bold. CPU load measured at 30Hz with 640×600 resolution.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



